WO2021157117A1 - 挟持装置及び段積み装置 - Google Patents
挟持装置及び段積み装置 Download PDFInfo
- Publication number
- WO2021157117A1 WO2021157117A1 PCT/JP2020/035017 JP2020035017W WO2021157117A1 WO 2021157117 A1 WO2021157117 A1 WO 2021157117A1 JP 2020035017 W JP2020035017 W JP 2020035017W WO 2021157117 A1 WO2021157117 A1 WO 2021157117A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sensor
- tire
- holding
- pair
- load
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G61/00—Use of pick-up or transfer devices or of manipulators for stacking or de-stacking articles not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/46—Position indicators for suspended loads or for crane elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/901—Devices for picking-up and depositing articles or materials provided with drive systems with rectilinear movements only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/905—Control arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G57/00—Stacking of articles
- B65G57/02—Stacking of articles by adding to the top of the stack
- B65G57/03—Stacking of articles by adding to the top of the stack from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G57/00—Stacking of articles
- B65G57/02—Stacking of articles by adding to the top of the stack
- B65G57/16—Stacking of articles of particular shape
- B65G57/20—Stacking of articles of particular shape three-dimensional [3D], e.g. cubiform or cylindrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G57/00—Stacking of articles
- B65G57/30—Stacking of articles by adding to the bottom of the stack
- B65G57/301—Stacking of articles by adding to the bottom of the stack by means of reciprocatory or oscillatory lifting and holding or gripping devices
- B65G57/303—Stacking of articles by adding to the bottom of the stack by means of reciprocatory or oscillatory lifting and holding or gripping devices the stack being lowered by mobile grippers or holders onto added articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/10—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means
- B66C1/42—Gripping members engaging only the external or internal surfaces of the articles
- B66C1/44—Gripping members engaging only the external or internal surfaces of the articles and applying frictional forces
- B66C1/445—Gripping members engaging only the external or internal surfaces of the articles and applying frictional forces motor actuated
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/10—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means
- B66C1/62—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means comprising article-engaging members of a shape complementary to that of the articles to be handled
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/22—Control systems or devices for electric drives
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
- B66C13/48—Automatic control of crane drives for producing a single or repeated working cycle; Program control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C5/00—Base supporting structures with legs
- B66C5/02—Fixed or travelling bridges or gantries, i.e. elongated structures of inverted L or of inverted U shape or tripods
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B29—WORKING OF PLASTICS; WORKING OF SUBSTANCES IN A PLASTIC STATE IN GENERAL
- B29D—PRODUCING PARTICULAR ARTICLES FROM PLASTICS OR FROM SUBSTANCES IN A PLASTIC STATE
- B29D30/00—Producing pneumatic or solid tyres or parts thereof
- B29D30/0016—Handling tyres or parts thereof, e.g. supplying, storing, conveying
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0273—Tires
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/02—Control or detection
- B65G2203/0208—Control or detection relating to the transported articles
- B65G2203/0233—Position of the article
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/042—Sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2203/00—Indexing code relating to control or detection of the articles or the load carriers during conveying
- B65G2203/04—Detection means
- B65G2203/042—Sensors
- B65G2203/044—Optical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2814/00—Indexing codes relating to loading or unloading articles or bulk materials
- B65G2814/03—Loading or unloading means
- B65G2814/0301—General arrangements
- B65G2814/0304—Stacking devices
- B65G2814/0305—Adding to the top
Definitions
- the present invention relates to a holding device, particularly a holding device for holding a round baggage.
- Patent Document 1 a tire holding device for holding and moving a tire is known (see, for example, Patent Document 1).
- the tire holding device incorporated in the ceiling traveling vehicle described in Patent Document 1 has an elevating table, a chucking claw, and a sensor provided on the chucking claw.
- the chucking claws are arranged inside the tire to support the tire from the inside.
- a detection means In the conventional tire holding device, it is necessary to detect the position of the tire when the tire is gripped by the hand.
- a detection means a mechanical type including a detection plate, a spring, and a detection plate detector has been adopted. Since such a detection means is mechanical, the number of parts is large.
- An object of the present invention is to reduce the number of parts of the baggage detecting means in the holding device.
- the sandwiching device includes a mounting portion, a pair of sandwiching portions, a sensor, and a controller.
- the loading section stores round luggage.
- the pair of holding portions sandwiches the side surface of the load to be placed on the loading portion, and has a contact surface that can come into contact with the side surface of the load including the bent portion.
- the sensor has an optical axis across the bend and along the load.
- the controller does not pinch the cargo, but moves the pair of pinching parts closer to the first position where the cargo is detected by the sensor, receives the detection signal from the sensor, and then pairs to the second position where the cargo is pinched. Move the sandwiches so that they are close to each other.
- the shape of the bent portion may be, for example, a part of an arc or a V shape in a plan view.
- the bent portion is an arc portion if it is an arc, and a curved portion if it is V-shaped.
- the presence of the bent portion allows the pair of holding portions to come into contact with the side surface of the round load, and further, the load can be detected before the contact surface comes into contact with the load.
- the controller may confirm the detection of the load by the sensor after the pair of holding portions is stopped at the first position. Further, the controller may confirm the detection of the load by the sensor without stopping the pair of holding portions at the first position. In this case, the movement of the pair of holding portions is terminated after passing through the first position if the detection of the cargo cannot be confirmed.
- the luggage can be detected by non-contact before the luggage is sandwiched. Therefore, even if the diameters of the luggage to be carried are different, it can be detected accurately.
- the sensor since the sensor is non-contact type, the number of parts is reduced.
- the contact surface is arcuate in plan view
- the sensor may be provided so that the optical axis intersects two points of the arc.
- the optical axis may be parallel to the line connecting the ends of the arc, or may coincide with the line connecting the ends of the arc.
- the optical axis may be orthogonal to the moving direction of the pair of sandwiching portions.
- the optical axis may connect the end side and the end side of the arc of the first holding portion and the second holding portion in a plan view.
- the load can be detected non-contactly at a position away from the contact surface, so that the load can be reliably detected.
- the luggage may be a tire having laterally grooved sides.
- the sensor may be provided so that the optical axis is tilted upward with respect to the horizontal direction.
- the "groove extending in the horizontal direction" may extend in the horizontal direction as a whole, and includes, for example, a straight line and a zigzag.
- the controller may stop the movement of the holding portion provided with the sensor among the pair of holding portions.
- the controller is Even if the cargo is detected by the sensor, the movement of the holding part of the pair of holding parts provided with the sensor is continued, and the movement is continued. If the sensor does not detect the cargo even if the moving distance of one of the pair of holding parts exceeds a predetermined distance, the movement of the holding parts may be stopped to handle the abnormality.
- the controller is carried in with an empty space between the pair of holding portions, and for the first luggage to be held first, the pair of holding portions are moved so as to approach the first position and stopped at the first position.
- the pair of holding portions When the first load is detected by the sensor, the pair of holding portions may be moved so as to approach each other to the second position where the first load is held.
- the controller For the second luggage to be held after the second, the controller may move the pair of holding portions to the second position without stopping at the first position to hold the second luggage.
- the controller may confirm that the luggage is being held by the sensor after the pair of holding portions with respect to the second luggage is stopped at the second position. In this device, the second and subsequent packages are not stopped at the first position, so that the cycle time is shortened.
- the reason why the second baggage does not have to be stopped at the first position is, for example, for the first baggage, since the pair of holding portions are moved closer to each other and stopped at the first position, the position is memorized. This is because the amount of movement of the pair of sandwiching portions to the second position can be determined. Further, the sensor is used for stopping the pair of holding portions at the first position for the first luggage, and for the second luggage, the pair of holding portions sandwich the second luggage at the second position. Used to confirm.
- the stacking device includes the above-mentioned sandwiching device and a driving device for driving a pair of sandwiching portions in the horizontal direction and the vertical direction.
- the number of parts of the cargo detecting means can be reduced.
- the schematic plan view of the transfer system of 1st Embodiment The schematic side view of the 1st positioning apparatus.
- the schematic side view of the 1st positioning apparatus Schematic perspective view of the stacking device. Schematic front view of the stacking device.
- the schematic partial plan view explaining the holding operation of a stacking apparatus The schematic partial plan view explaining the holding operation of a stacking apparatus.
- the schematic partial plan view explaining the holding operation of a stacking apparatus The schematic partial plan view explaining the holding operation of a stacking apparatus.
- the schematic partial plan view explaining the holding operation of a stacking apparatus The schematic partial plan view explaining the holding operation of a stacking apparatus.
- the block diagram which shows the control composition of a stacking apparatus.
- a flowchart showing a stacking control operation A flowchart showing a pinching operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation The schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation The schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation The schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation The schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation The schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation The schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation The schematic diagram which shows one state of the operation of a pair of holding parts in a stacking operation.
- the schematic side view which shows the relationship between the optical axis of a tire and a sensor in 2nd Embodiment.
- the flowchart which shows the pinching operation in 3rd Embodiment.
- FIG. 1 is a schematic plan view of the transport system of the first embodiment.
- the transport system 1 has a function of transporting tires T (an example of luggage) one by one, then stacking a plurality of tires T, and further transporting the stacked tires T.
- the conveyor system 1 has a conveyor device 3.
- the conveyor device 3 is a device that conveys the tire T.
- the conveyor device 3 mainly includes a first conveyor 5, a second conveyor 7, and a converter 9.
- the converter 9 is arranged between the first conveyor 5 and the second conveyor 7.
- the tire T is conveyed in the order of the second conveyor 7, the converter 9, and the first conveyor 5.
- the first conveyor 5 and the second conveyor 7 are orthogonal to each other, and the converter 9 changes the transport direction of the tire T from the second conveyor 7 to the first conveyor 5.
- the first conveyor 5 and the second conveyor 7 are known techniques, for example, a roller conveyor, and have a transport surface 5a for transporting the tire T.
- the converter 9 is a known technique, and comprises, for example, a roller conveyor and a chain conveyor capable of raising and lowering between them.
- the members of each device are omitted as appropriate for the sake of simplification of the figure.
- the extending direction of the first conveyor 5 is referred to as the first direction (arrow Y)
- the extending direction of the second conveyor 7 is referred to as the second direction (arrow X).
- the transport system 1 has a centering stacking device 11.
- the centering stacking device 11 is a device for stacking tires T while centering them.
- the stacked tires T are then directly inserted into the rack (not shown) using a robot arm (not shown) or the like, but if the tires T are not accurately centered, a plurality of robot arms are provided. When gripping the tire T, the tire may tilt and collapse. Therefore, accurate centering is required.
- the centering stacking device 11 aims to solve the above problems (described later).
- the centering stacking device 11 has a first positioning device 13.
- the first positioning device 13 is a device that defines the end portion of the tire T conveyed by the first conveyor 5 at the first predetermined position in the first direction.
- the first positioning device 13 has a first stopper 15.
- the first stopper 15 is provided on the first conveyor 5.
- the first stopper 15 projects upward from the transport surface 5a (an example of the mounting portion) of the first conveyor 5 and can come into contact with the tire T conveyed by the first conveyor 5 in the first direction.
- the first stopper 15 extends in the second direction.
- the first positioning device 13 will be specifically described with reference to FIGS. 2 and 3. 2 and 3 are schematic side views of the first positioning device.
- the first positioning device 13 separates the first stopper 15 from the contact position (FIG. 2) protruding upward from the transport surface 5a and diagonally downward from the tire T on the downstream side in the transport direction from the contact position 5a. It has a first stopper drive unit 17 that moves to and from a lower retracted position (FIG. 3).
- the first stopper drive unit 17 is, for example, an air cylinder.
- the first stopper 15 moves from the contact position to the retracted position after the tire T comes into contact with the tire T.
- the retracted position is located at a position separated from the contact position in the first direction from the tire T, it is difficult for a load to act on the tire T from the first stopper 15. Therefore, the position and orientation of the tire T are unlikely to change. If the rotation and wear of the tire T are not taken into consideration, the first stopper may move in and out only up and down.
- the centering stacking device 11 has a second positioning device 23.
- the second positioning device 23 is a device that determines the end portion of the tire T in the second direction at the second predetermined position.
- the second positioning device 23 has a second stopper 25.
- the second stopper 25 is provided on one side (lower side of FIG. 1) in the second direction of the converter 9.
- the second stopper 25 projects upward from the transport surface 9a of the converter 9 and can come into contact with one side surface of the tire T.
- the second positioning device 23 moves the second stopper 25 between the contact position protruding upward from the transport surface 5a and the retracted position separated from the tire T in the second direction from the contact position. (Fig. 10).
- the drive unit 77 may be the same as the first stopper drive unit 17 of the first positioning device 13, or may have a structure in which the second stopper 25 is retracted in the lateral direction. If the rotation of the tire T is not taken into consideration, the second stopper 25 does not have to be retracted.
- the converter 9 brings the tire T closer to one side in the second direction (lower side in FIG. 1 and the second stopper 25 side) on the upstream side in the transport direction from the first positioning device 13. As a result, the tire T is positioned in the second direction by coming into contact with the second stopper 25. After that, the second stopper 25 moves from the contact position to the retracted position. At this time, since the contact position is located in the second direction away from the tire T from the retracted position, it is difficult for a load to act on the tire T from the second stopper 25. Therefore, the position and orientation of the tire T are unlikely to change. After that, the tire T is conveyed on the first conveyor 5 toward the first positioning device 13 in the first direction.
- the tire T is conveyed without changing the posture or position positioned in the second direction. Will be done. Then, the tire T is positioned in the first direction by the first stopper 15 at the stacking position 61.
- the stacking position 61 is a position where the tire T is stopped and occupied on the upstream side of the first stopper 15 in the transport direction. From the above, the tire T is stopped at the stacking position 61 on the first conveyor 5 by the first stopper 15 in a state of being positioned in the first direction and the second direction, respectively.
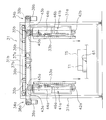
- FIG. 4 is a schematic perspective view of the stacking device.
- FIG. 5 is a schematic front view of the stacking device.
- the centering stacking device 11 has a stacking device 31 (an example of a holding device).
- the stacking device 31 is a device for stacking the centered tires T.
- the stacking device 31 has a pair of columns 31a and a ceiling portion 31b that connects the columns 31a to each other at the upper part.
- the pair of columns 31a are arranged on both sides of the first conveyor 5 so as to sandwich the stacking position 61 of the first conveyor 5.
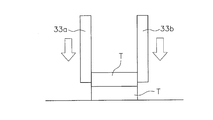
- the stacking device 31 has a first holding portion 33a and a second holding portion 33b.
- the first holding portion 33a and the second holding portion 33b are members for sandwiching the side surfaces of one or a plurality of tires T.
- the first holding portion 33a and the second holding portion 33b have a predetermined length in the vertical direction, and have arc-shaped contact surfaces 33a1 and 33b1 (an example of a bent portion) in a plan view.
- the first holding portion 33a and the second holding portion 33b can hold, for example, one tire T or two to ten stacked tires T at the same time.
- the first holding portion 33a is on the same side as the second positioning device 23. Since the contact surfaces 33a1 and 33b1 are bent portions, the first sandwiching portion 33a and the second sandwiching portion 33b can be brought into contact with each other along the side surface of the tire T.
- the stacking device 31 has a first horizontal driving device 34a and a second horizontal driving device 34b for moving the first holding portion 33a and the second holding portion 33b in the horizontal direction.
- the first horizontal drive device 34a and the second horizontal drive device 34b are the first chain 36a and the second chain that drive the first carriage 35a and the second carriage 35b and the first carriage 35a and the second carriage 35b in the horizontal direction. It has a chain 36b, a first sprocket 37a and a second sprocket 37b, a third sprocket 38a and a fourth sprocket 38b, and a first pinching motor 39a and a second pinching motor 39b, respectively.
- the stacking device 31 has a first elevating device 41a and a second elevating device 41b.
- the first elevating device 41a and the second elevating device 41b are a pair of devices that elevate and lower the first holding portion 33a and the second holding portion 33b, respectively.
- the first elevating device 41a and the second elevating device 41b are provided below each of the first horizontal driving device 34a and the second horizontal driving device 34b.
- the first elevating device 41a connects the first lower sprocket 42a arranged downward in the vertical direction, the first upper sprocket 43a arranged upward in the vertical direction, the first lower sprocket 42a, and the first upper sprocket 43a. It has a first chain 44a to be used.
- a first sandwiching portion 33a is fixed to the first chain 44a.
- the first elevating device 41a further includes a first elevating motor 45a that drives the first upper sprocket 43a and moves the first holding portion 33a between the upper position and the lower position.
- the first elevating device 41a further has a first guide portion 46a that guides the first holding portion 33a in the vertical direction.
- the second elevating device 41b connects the second lower sprocket 42b arranged downward in the vertical direction, the second upper sprocket 43b arranged upward in the vertical direction, the second lower sprocket 42b, and the second upper sprocket 43b. It has a second chain 44b to be used. A second sandwiching portion 33b is fixed to the second chain 44b.
- the second elevating device 41b further has a second elevating motor 45b that drives the second upper sprocket 43b and moves the second holding portion 33b between the upper position and the lower position.
- the second elevating device 41b further has a second guide portion 46b that guides the second holding portion 33b in the vertical direction.
- the above-mentioned "upper position of the first holding portion 33a and the second holding portion 33b” means that the lower ends of the first holding portion 33a and the second holding portion 33b are at a height that does not interfere with one tire T. is doing.
- the upper position may be, for example, an upper position according to the height of the largest tire T, or an upper position according to the type of the tire T.
- the above-mentioned "lower position of the first holding portion 33a and the second holding portion 33b” is the first when the first holding portion 33a and the second holding portion 33b grip the tire T on the first conveyor 5.
- the height is such that the sandwiching portion 33a and the second sandwiching portion 33b and the first conveyor 5 do not interfere with each other.
- the lower ends of the first sandwiching portion 33a and the second sandwiching portion 33b are lower than the first lower sprocket 42a and the second lower sprocket 42b. Is also provided so that it is in a low position. Therefore, the lowermost tire T among the plurality of stages of tires T can also be sandwiched by the first sandwiching portion 33a and the second sandwiching portion 33b. As shown in FIG. 5, the first lower sprocket 42a and the second lower sprocket 42b are provided at positions higher than the upper surface of the highest tire T.
- the first lower sprocket 42a and the second lower sprocket 42b are arranged above the first conveyor 5, but the first lower sprocket 42a and the second lower sprocket 42b hinder the transportation of the tire T. There is no.
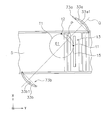
- the stacking device 31 has a first sensor 73a and a second sensor 73b (an example of a sensor) (FIGS. 6 and 10).
- the first sensor 73a and the second sensor 73b are sensors that detect the tire T at a predetermined distance from the contact surfaces 33a1 and 33b1 of the first holding portion 33a and the second holding portion 33b, respectively.
- the first sensor 73a and the second sensor 73b are light transmission type sensors, and are composed of floodlights and receivers arranged on the left and right ends of the contact surfaces 33a1 and 33b1 of the first holding portion 33a and the second holding portion 33b, respectively. It is configured.
- the contact surfaces 33a1 and 33b1 are provided with holes (not shown) through which the optical axes of the first sensor 73a and the second sensor 73b pass. Further, the optical axes of the first sensor 73a and the second sensor 73b are orthogonal to the moving directions of the first holding portion 33a and the second holding portion 33b, and the first holding portion 33a and the second holding portion 33a and the second holding portion 33a are viewed in a plan view. It connects the end side and the end side of the arc of the sandwiching portion 33b.
- the optical axis may be parallel to and deviated from the above line, for example, as long as it crosses the arc by intersecting two points of the arc in a plan view and thereby follows the tire T. In this embodiment, the optical axis extends in the horizontal direction.
- the stacking device 31 has a tire height sensor 74 (FIG. 10) for grasping the height of the tire T.
- the tire height sensor 74 is a plurality of light transmitting type or light reflecting type sensors arranged in the height direction.
- the type of sensor is not particularly limited, and a distance measuring sensor arranged above the tire T may be used. Further, the position of the sensor is not particularly limited. Further, the grasp of the height of the tire T may be included in the tire information from the host controller (not shown).
- the controller 71 controls the driving amounts of the first elevating motor 45a and the second elevating motor 45b according to the height of the tire T. Therefore, the amount of rise of the first holding portion 33a and the second holding portion 33b can be minimized, so that the operation efficiency is improved.
- the stacking device 31 has a tire arrival sensor 75 (FIG. 10) that detects that the tire T has arrived at the stacking position 61.
- the tire arrival sensor 75 is a light transmission type or light reflection type sensor provided on both sides of the first conveyor 5.
- the type of sensor is not particularly limited, and a touch sensor provided on the first stopper 15 to detect contact with the tire T may be used.
- FIG. 6 is a schematic partial plan view illustrating a holding operation of the stacking device.
- a plurality of types of tires T1 to T5 are shown.
- each tire T is determined by the tire first portion t1 on the end side defined by the first positioning device 13 and the second positioning device 23. It has a tire second portion t2 which is on the end side.
- the position of the first portion t1 of the tire in the first direction is determined by the first stopper 15.
- the position of the second portion t2 of the tire in the second direction is previously determined by the second stopper 25 of the second positioning device 23.
- the tire T does not rotate on the first conveyor 5.
- the portion of the tire T in contact with the second stopper 25 becomes the tire second portion t2 at the stacking position 61 as it is.
- FIG. 6 shows only the tire first portion t1 and the tire second portion t2 of the tire T5.
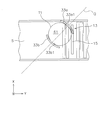
- the tire T1 will be described as an example with reference to FIGS. 7 to 9.
- 7 to 9 are schematic partial plan views for explaining the pinching operation of the stacking device.
- the tire T1 is the tire with the smallest size (that is, the shortest outer diameter).
- the first pinching portion 33a and the second pinching portion 33b pass between the tire first portion t1 and the tire second portion t2 of the tire T1 to sandwich the side surface of the tire T.
- the first holding portion 33a and the second holding portion 33b are sandwiched obliquely with respect to the first direction in the middle of the straight line P connecting the tire first portion t1 and the tire second portion t2.
- first sandwiching portion 33a and the second sandwiching portion 33b are sandwiched in a third direction (extending direction of the straight line Q, clamping direction) orthogonal to the straight line P in the horizontal direction. More specifically, the first pinching portion 33a and the second pinching portion 33b are between the tire first portion t1 and the tire second portion t2 (specifically, the tire first portion t1 and the tire first portion in the straight line P). Passing between the two portions t2), the tire T1 is sandwiched in a direction inclined by 45 degrees with respect to the first direction.
- the first pinching portion 33a and the second pinching portion 33b can accurately pinch the tires T1 having different outer diameters. Further, the first positioning device 13 and the stacking device 31 can be made into a compact configuration. In this embodiment, the center in the pinching direction and the center of the tire T1 coincide with each other regardless of the type of the tire T. This is because the tire T has a circular shape, so that the center can be determined by performing two-point positioning.
- the tire pinching operation will be described step by step.
- the tire T1 is positioned by the first stopper 15.
- the first holding portion 33a and the second holding portion 33b move to the first position close to the side surface of the tire T1.
- the arrival at the first position is determined by the detection signals from the first sensor 73a and the second sensor 73b.
- the tire T1 can be detected before the first holding portion 33a and the second holding portion 33b come into contact with the tire T1, because the first holding portion 33a and the first holding portion 33a provided with the first sensor 73a and the second sensor 73b can be detected. This is because the 2 sandwiching portion 33b is bent.
- the first pinching portion 33a and the second pinching portion 33b move to the second position where they abut on the side surface of the tire T1, whereby the first pinching portion 33a and the second pinching portion 33b move. Hold the tire T1.
- the detection signals from the first sensor 73a and the second sensor 73b that the first holding portion 33a and the second holding portion 33b sandwich the tire T1.
- the contact surfaces 33a1 and 33b1 of the first sandwiching portion 33a and the second sandwiching portion 33b have an arc shape in a plan view, the tire T is not contacted before the tire T is sandwiched. Can be detected.
- the diameters of the tires T to be sandwiched are different, they can be accurately detected.
- the first sensor 73a and the second sensor 73b are non-contact type, the number of parts of the tire detecting means can be reduced.
- FIG. 10 is a block diagram showing a control configuration of the stacking device.
- the stacking device 31 has a controller 71 (an example of a controller).
- the controller 71 is a computer having a processor (for example, a CPU), a storage device (for example, ROM, RAM, HDD, SSD, etc.) and various interfaces (for example, an A / D converter, a D / A converter, a communication interface, etc.). It is a system.
- the controller 71 performs various control operations by executing a program stored in the storage unit (corresponding to a part or all of the storage area of the storage device).
- the controller 71 may be composed of a single processor, or may be composed of a plurality of independent processors for each control. Some or all of the functions of each element of the controller 71 may be realized as a program that can be executed by the computer system constituting the controller 71. In addition, a part of the function of each element of the controller 71 may be configured by a custom IC.
- the controller 71 includes a first stopper drive unit 17, a first elevating motor 45a, a second elevating motor 45b, a first pinching motor 39a, a second pinching motor 39b, a first sensor 73a, a second sensor 73b, and a tire height sensor. 74, the tire arrival sensor 75 is connected. Although not shown, the controller 71 is connected to a sensor for detecting the size, shape and position of the tire T, a sensor and a switch for detecting the state of each device, and an information input device.
- FIG. 11 is a flowchart showing the stacking control operation.
- FIG. 12 is a flowchart showing the pinching operation.
- 13 to 25 are schematic views showing one state of the operation of the pair of sandwiching portions in the stacking operation.
- the control flowchart described below is an example, and each step can be omitted or replaced as needed. Further, a plurality of steps may be executed at the same time, or some or all of them may be executed in an overlapping manner. Further, each step of the control flowchart is not limited to a single control operation, and can be replaced with a plurality of control operations represented by a plurality of steps.
- each device is the result of a command from the controller 71 to each device, and these are represented by each step of the software application.
- tires T of the same size (type) are stacked, and after the series of operations is completed, tires of different sizes (types) are stacked.
- the tire T is positioned in the second direction by the second positioning device 23.
- step S1 of FIG. 11 the first stopper 15 moves to the contact position.
- the controller 71 controls the first stopper drive unit 17 to execute the above operation.
- step S2 the tire T waits for the stacking position 61 to arrive.
- the controller 71 determines the arrival of the tire T based on the detection signal from the tire arrival sensor 75.
- the process proceeds to step S3.
- step S3 the first stopper 15 moves to the retracted position. Specifically, the controller 71 controls the first stopper drive unit 17 to execute the above operation.
- step S4 the pinching operation in which the first pinching portion 33a and the second pinching portion 33b sandwich the tire T is executed.
- the operation of the first holding portion 33a will be described with reference to FIG. 12 (the same applies to the second holding portion 33b).
- step S101 the first holding portion 33a moves to the tire T side.
- step S102 it is determined whether or not the first sensor 73a has detected the tire T. If detected (if the detection signal is received from the first sensor 73a), the process proceeds to step S103, and if not detected, the process returns to step S101.
- step S103 as shown in FIG.
- step S104 the first pinching portion 33a stops at the first position close to (that is, not pinching) the side surface of the tire T.
- the condition for shifting from step S103 to step S104 includes checking the state of the second pinching portion 33b in order to prevent the tire T from being pushed during pinching.
- step S104 the first holding portion 33a further moves to the tire T side.
- the first holding portion 33a moves to the second position where it abuts on the side surface of the tire T.
- step S105 it is determined whether or not the torque value of the first pinching motor 39a has reached the specified value. If the specified value is reached, the process proceeds to step S106, and if the specified value is not reached, the process returns to step 104.
- step S106 the movement of the first holding portion 33a is stopped.
- step S5 of FIG. 11 it waits for the pinching operation to end.
- the controller 71 determines the end of the pinching operation based on, for example, the torques of the first pinching motor 39a and the second pinching motor 39b.
- step S6 as shown in FIG. 17, the first holding portion 33a and the second holding portion 33b are raised to lift the tire T.
- the controller 71 controls the first elevating motor 45a and the second elevating motor 45b to execute the above operation.
- step S7 the first stopper 15 moves to the contact position.
- step S8 it waits for the next tire T to arrive at the stacking position 61.
- the controller 71 determines the arrival of the tire T based on the detection signal from the tire arrival sensor 75.
- step S9 the first stopper 15 moves to the retracted position.
- step S10 as shown in FIG. 19, the first pinching portion 33a and the second pinching portion 33b are lowered to load and unload the gripped tire T onto the lower tire T.
- the controller 71 controls the first elevating motor 45a and the second elevating motor 45b to execute the above operation.
- step S11 the first pinching portion 33a and the second pinching portion 33b are separated from the tire T laterally to release the pinching.
- the controller 71 controls the first pinching motor 39a and the second pinching motor 39b to execute the above operation.
- the amount of movement of the first holding portion 33a and the second holding portion 33b may be controlled by a timer.
- the first holding portion 33a and the second holding portion 33b can be separated by the same distance or different distances.
- step S12 it is determined whether or not the stacking operation is completed. If it ends, the process ends, and if it does not end, the process returns to step S4. After the process is completed, the tires T on which the first conveyor 5 is stacked are transported to the downstream side in the transport direction.
- Steps S4 to S11 are repeated a predetermined number of times.
- step S4 as shown in FIGS. 21 to 23
- the pinching operation of the tire T is executed.
- the detection signals from the first sensor 73a and the second sensor 73b are used only for confirming the presence of the tire T (described later).
- step S6 the operation of lifting the tire T is executed as shown in FIG. 24.
- step S8 as shown in FIG. 25, it waits for the next tire T to arrive.
- description thereof will be omitted.
- the position of the tire T in the first direction is determined by the first positioning device 13, and the position in the second direction is determined by the second positioning device 23.
- the tire T is further sandwiched between the tire first portion t1 and the tire second portion t2 by the first sandwiching portion 33a and the second sandwiching portion 33b. In this way, even tires T having different outer diameters are accurately sandwiched.
- the controller may move the first pinching portion 33a and the second pinching portion 33b to the second position without stopping at the first position to sandwich the tire T. .. This is because, for example, for the tire T that is first carried in with the space between the first holding portion 33a and the second holding portion 33b empty, the first holding portion 33a and the second holding portion 33b are brought closer to the first position. This is because the tires are moved to the tire and stopped at the first position, so that the position and the pinching position can be memorized and the amount of movement to the second position can be determined.
- the tire T is operated by the first sensor 73a and the second sensor 73b. Make sure that is pinched. In this device, the second and subsequent tires T do not stop at the first position, so that the cycle time is shortened.
- the first sensor 73a and the second sensor 73b are used for stopping the first tire T1 at the first position of the first pinching portion 33a and the second pinching portion 33b, and the second and subsequent tires T1.
- the tire T is used to confirm that the first holding portion 33a and the second holding portion 33b sandwich the tire T at the second position.
- the above control can be used in stacking and disassembling.
- the tire T carried in first is the first baggage
- the tire T carried in after the second is the second baggage.
- step disassembly the bottom tire T of the stacked tires T is the first luggage
- the second and subsequent tires T of the stacked tires are the second luggage. ..
- the stacked tires T are collectively transported by, for example, a transport device that supports the inner diameter or the lower side of the tire T.
- the stacked tires T are closer to one side in the second direction, but the center of the tires is aligned with the transfer position by the same mechanism as the second direction adjusting conveyor.
- the transport device can support the tire T in a fixed position.
- FIG. 26 is a schematic side view showing the relationship between the tire and the optical axis of the sensor in the second embodiment. Since the basic configuration and the basic operation are the same as those in the first embodiment, the differences will be mainly described below. Further, since the first sensor 73a and the second sensor 73b have the same configuration, only the first sensor 73a will be described.
- the first sensor 73a is a sensor that detects the tire T at a predetermined distance from the contact surfaces of the first holding portion 33a and the second holding portion 33b.
- the optical axis 76 of the first sensor 73a is set to be tilted upward with respect to the horizontal direction.
- the floodlight 73a1 is provided on the upper side and the light receiver 73a2 is provided on the lower side.
- the tilt angle of the optical axis 76 is, for example, about 5 degrees. With the above angle, transmission through the groove 81 (described later) of the tire T is prevented, that is, the large outer surface of the tire T can be reliably detected.
- the tire T shown in FIG. 26 has a plurality of grooves 81 extending in the circumferential direction.
- the detection portion 83 of the pinching direction apex of the tire T is a portion detected by the sensor, and in the present embodiment, the portions 85 and 87 within the detection portion 83 and on both sides are detected. It is supposed to be done.
- the controller confirms the detection of the tire T by the sensor after the pair of sandwiching portions has stopped at the first position.
- the controller may confirm the detection of the tire T by the sensor without stopping the pair of holding portions at the first position. In this case, if the detection of the tire T cannot be confirmed, the pair of sandwiching portions are stopped after passing through the first position.
- FIG. 27 is a flowchart showing the pinching operation in the third embodiment.
- step S101 the first holding portion 33a moves to the tire T side.
- step S102 it is determined whether or not the first sensor 73a has detected the tire T. If detected, the process proceeds to step S105, and if not detected, the process proceeds to step S107.
- the condition for shifting from step S102 to step S105 includes checking the state of the second pinching portion 33b in order to prevent the tire T from being pushed during pinching. As a result, the first holding portion 33a moves to the second position where it abuts on the side surface of the tire T.
- step S105 it is determined whether or not the torque value of the first pinching motor 39a has reached the specified value. If the specified value is reached, the process proceeds to step S106, and if the specified value is not reached, the process executes step S105 again.
- step S106 the movement of the first holding portion 33a is stopped.
- step S107 it is determined whether or not the amount of movement of the first holding portion 33a exceeds a predetermined distance. If the predetermined distance is exceeded, the process proceeds to step S108, and if the predetermined distance is not exceeded, the process returns to step S101. In step S108, the movement of the first sandwiching portion 33a is stopped, and an abnormality process is further performed.
- the above-mentioned “predetermined distance” is determined for each tire T, for example. More specifically, the “predetermined distance” means that the distance between the first holding portion 33a and the second holding portion 33b is the same as or smaller than the width at which the tire T can be detected without contact, or the same as the diameter of the tire T. Or it is set to be smaller.
- the sandwiching device (for example, the stacking device 31) includes a mounting portion, a pair of sandwiching portions, a sensor, and a controller.
- a round load (for example, a tire T) is placed on the mounting portion (for example, the transport surface 5a).
- the pair of holding portions (for example, the first holding portion 33a and the second holding portion 33b) sandwich the side surface of the load to be placed on the mounting portion, and can come into contact with the side surface of the load including the bent portion.
- Has a contact surface for example, contact surfaces 33a1, 33b1).
- the sensors eg, first sensor 73a and second sensor 73b) have an optical axis that traverses the bend and is along the load.
- the controller moves the pair of holding portions close to the first position (for example, FIG. 8) that does not hold the load, and when the sensor detects the load, the second position for holding the load. (For example, FIG. 9) is moved so that the pair of holding portions are close to each other.
- the pair of holding portions since the pair of holding portions have the bent portion and the luggage is round, the luggage can be detected by non-contact before the luggage is sandwiched. Therefore, even if the diameters of the luggage to be carried are different, it can be detected accurately.
- the sensor is a non-contact type, the number of parts of the tire detecting means can be reduced.
- the controller moves a pair of holding parts toward the tire at the same time.
- the controller may make the timing of movement of the pair of holding portions different.
- the tire may be sandwiched by first bringing one sandwiching portion into contact with the tire and then bringing the other sandwiching portion into contact with the tire.
- the holding device may be used for a device other than the stacking device.
- the present invention can be applied not only to stacking but also to stacking. For example, positioning may be performed in the same manner as in stacking, and step disassembling may be performed.
- Deformation example of luggage Round luggage is not limited to tires.
- the present invention can be widely applied to a holding device for holding a round load.
- Conveyor system 3 Conveyor device 5: 1st conveyor 5a: Conveyor surface 7: 2nd conveyor 9: Conversion machine 11: Centering stacking device 13: 1st positioning device 15: 1st stopper 17: 1st stopper drive unit 23: Second positioning device 25: Second stopper 31: Stacking device 31a: Pillar 31b: Ceiling portion 33a: First holding portion 33b: Second holding portion 34a: First horizontal driving device 34b: Second horizontal driving Device 35a: 1st sprocket 35b: 2nd trolley 36a: 1st chain 36b: 2nd chain 37a: 1st sprocket 37b: 2nd sprocket 38a: 3rd sprocket 38b: 4th sprocket 39a: 1st pinching motor 39b: 1st 2 Holding motor 41a: 1st elevating device 41b: 2nd elevating device 42a: 1st lower sprocket 42b: 2nd lower sprocket 43a: 1
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Tyre Moulding (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Stacking Of Articles And Auxiliary Devices (AREA)
- Automobile Manufacture Line, Endless Track Vehicle, Trailer (AREA)
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020227030541A KR102682380B1 (ko) | 2020-02-06 | 2020-09-16 | 클램핑 장치 및 스태킹 장치 |
| EP20917483.8A EP4101804A4 (en) | 2020-02-06 | 2020-09-16 | CLAMPING DEVICE AND STACKING DEVICE |
| CN202080095444.1A CN115038663B (zh) | 2020-02-06 | 2020-09-16 | 夹持装置以及层叠装置 |
| US17/796,711 US11858755B2 (en) | 2020-02-06 | 2020-09-16 | Gripping apparatus and stacker |
| JP2021575600A JP7276520B2 (ja) | 2020-02-06 | 2020-09-16 | 挟持装置及び段積み装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020018905 | 2020-02-06 | ||
| JP2020-018905 | 2020-02-06 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021157117A1 true WO2021157117A1 (ja) | 2021-08-12 |
Family
ID=77199812
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/035017 Ceased WO2021157117A1 (ja) | 2020-02-06 | 2020-09-16 | 挟持装置及び段積み装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11858755B2 (https=) |
| EP (1) | EP4101804A4 (https=) |
| JP (1) | JP7276520B2 (https=) |
| KR (1) | KR102682380B1 (https=) |
| CN (1) | CN115038663B (https=) |
| TW (1) | TWI840651B (https=) |
| WO (1) | WO2021157117A1 (https=) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7192960B2 (ja) * | 2019-02-19 | 2022-12-20 | 村田機械株式会社 | 搬送システム |
| JP7448040B2 (ja) * | 2021-01-21 | 2024-03-12 | 村田機械株式会社 | タイヤ搬送装置 |
| CN116142957B (zh) * | 2023-04-21 | 2023-07-04 | 河南钰润建筑工程有限公司 | 一种预制柱吊装装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61176187U (https=) * | 1985-04-22 | 1986-11-04 | ||
| JPH11228070A (ja) | 1998-02-19 | 1999-08-24 | Murata Mach Ltd | 天井走行車 |
| JP2000247569A (ja) * | 1999-03-01 | 2000-09-12 | Nkk Corp | 金属帯コイル運搬用リフタ− |
| US20190193954A1 (en) * | 2017-12-26 | 2019-06-27 | Cynergy Ergonomics, Inc. | Tire manipulator |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59353B2 (ja) * | 1980-07-24 | 1984-01-06 | ファナック株式会社 | 把持装置 |
| US4507078A (en) * | 1983-03-28 | 1985-03-26 | Silicon Valley Group, Inc. | Wafer handling apparatus and method |
| USH65H (en) * | 1983-05-27 | 1986-05-06 | At&T Bell Laboratories | Dynamic optical sensing: Robotic system and manufacturing method utilizing same |
| JPH072530B2 (ja) * | 1984-07-25 | 1995-01-18 | 株式会社ブリヂストン | タイヤの段積み装置 |
| JPS6171302A (ja) * | 1984-09-14 | 1986-04-12 | Toshiba Corp | ロボットハンド用近接センサ装置 |
| US4849643A (en) * | 1987-09-18 | 1989-07-18 | Eaton Leonard Technologies | Optical probe with overlapping detection fields |
| US5008555A (en) * | 1988-04-08 | 1991-04-16 | Eaton Leonard Technologies, Inc. | Optical probe with overlapping detection fields |
| US5177563A (en) * | 1989-02-01 | 1993-01-05 | Texas A&M University System | Method and apparatus for locating physical objects |
| JP3734607B2 (ja) * | 1997-08-01 | 2006-01-11 | 本田技研工業株式会社 | タイヤの位置決め搬送装置 |
| TW558058U (en) * | 2002-05-03 | 2003-10-11 | Nanya Technology Corp | Wafer carrying apparatus |
| CN201012864Y (zh) * | 2007-03-12 | 2008-01-30 | 江苏天奇物流系统工程股份有限公司 | 轮胎堆垛机 |
| US8078315B2 (en) * | 2008-05-08 | 2011-12-13 | Cascade Corporation | Control system for a load handling clamp |
| US9310791B2 (en) * | 2011-03-18 | 2016-04-12 | Siemens Healthcare Diagnostics Inc. | Methods, systems, and apparatus for calibration of an orientation between an end effector and an article |
| CN202967877U (zh) * | 2012-12-12 | 2013-06-05 | 武汉钢铁(集团)公司 | 卧卷夹钳防夹伤装置 |
| EP2832676B1 (en) * | 2013-07-29 | 2016-10-19 | Siemens Aktiengesellschaft | Blade gripping device |
| JP2015119066A (ja) * | 2013-12-19 | 2015-06-25 | 株式会社安川電機 | 検出システムおよび検出方法 |
| JP6270595B2 (ja) * | 2014-04-01 | 2018-01-31 | 鈴鹿エンヂニヤリング株式会社 | ベールゴムの吊り揚げ搬送方法及びその装置 |
| JP6256702B2 (ja) * | 2014-12-25 | 2018-01-10 | 株式会社ダイフク | 物品搬送用容器昇降搬送装置 |
| JP2019028010A (ja) * | 2017-08-03 | 2019-02-21 | 株式会社ミツトヨ | パイプ測定装置 |
| CN209957229U (zh) * | 2019-01-17 | 2020-01-17 | 南通申东裕浩轮胎有限公司 | 一种大型轮胎夹具 |
| JP7192960B2 (ja) * | 2019-02-19 | 2022-12-20 | 村田機械株式会社 | 搬送システム |
-
2020
- 2020-09-16 WO PCT/JP2020/035017 patent/WO2021157117A1/ja not_active Ceased
- 2020-09-16 US US17/796,711 patent/US11858755B2/en active Active
- 2020-09-16 KR KR1020227030541A patent/KR102682380B1/ko active Active
- 2020-09-16 CN CN202080095444.1A patent/CN115038663B/zh active Active
- 2020-09-16 JP JP2021575600A patent/JP7276520B2/ja active Active
- 2020-09-16 EP EP20917483.8A patent/EP4101804A4/en active Pending
-
2021
- 2021-01-29 TW TW110103353A patent/TWI840651B/zh active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61176187U (https=) * | 1985-04-22 | 1986-11-04 | ||
| JPH11228070A (ja) | 1998-02-19 | 1999-08-24 | Murata Mach Ltd | 天井走行車 |
| JP2000247569A (ja) * | 1999-03-01 | 2000-09-12 | Nkk Corp | 金属帯コイル運搬用リフタ− |
| US20190193954A1 (en) * | 2017-12-26 | 2019-06-27 | Cynergy Ergonomics, Inc. | Tire manipulator |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4101804A4 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115038663A (zh) | 2022-09-09 |
| TW202134163A (zh) | 2021-09-16 |
| US20230109072A1 (en) | 2023-04-06 |
| JP7276520B2 (ja) | 2023-05-18 |
| CN115038663B (zh) | 2025-10-31 |
| TWI840651B (zh) | 2024-05-01 |
| KR102682380B1 (ko) | 2024-07-04 |
| US11858755B2 (en) | 2024-01-02 |
| EP4101804A1 (en) | 2022-12-14 |
| EP4101804A4 (en) | 2024-02-28 |
| KR20220136415A (ko) | 2022-10-07 |
| JPWO2021157117A1 (https=) | 2021-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7192960B2 (ja) | 搬送システム | |
| WO2021157117A1 (ja) | 挟持装置及び段積み装置 | |
| WO2016103993A1 (ja) | 物品搬送用容器昇降搬送装置 | |
| KR102091915B1 (ko) | 기판 반송 로봇 및 기판 처리 시스템 | |
| US11964303B2 (en) | Methods, devices and systems for cargo sorting | |
| CA2472434A1 (en) | Materials handling system | |
| JP5926574B2 (ja) | パレタイズシステム | |
| CN101186010A (zh) | 环管理系统 | |
| JP2023511449A5 (https=) | ||
| JPH1045210A (ja) | スタッカクレーン | |
| CN115697865B (zh) | 物品搬运设备 | |
| JP7559794B2 (ja) | 荷卸し装置 | |
| CN112278926A (zh) | 板材分料机 | |
| WO2023143346A1 (zh) | 货箱转移系统 | |
| JP2002326721A (ja) | タイヤの受渡し装置 | |
| JP2012214265A (ja) | 把持装置 | |
| JP4725438B2 (ja) | 自動倉庫における荷移載装置の制御装置及び制御方法 | |
| KR20220072236A (ko) | 이송 장치 | |
| JP2661543B2 (ja) | 物品の位置ずれ補正装置 | |
| JP7452345B2 (ja) | 回転装置及びコンベヤ装置 | |
| JP7413756B2 (ja) | 移載装置 | |
| CN104619613B (zh) | 移载装置 | |
| JP3697660B2 (ja) | 搬送装置のステーション | |
| CN113858253A (zh) | 3d视觉自动识别抓取上料系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20917483 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021575600 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 20227030541 Country of ref document: KR Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2020917483 Country of ref document: EP Effective date: 20220906 |
|
| WWG | Wipo information: grant in national office |
Ref document number: 202080095444.1 Country of ref document: CN |