WO2019202779A1 - 工作機械 - Google Patents
工作機械 Download PDFInfo
- Publication number
- WO2019202779A1 WO2019202779A1 PCT/JP2018/048027 JP2018048027W WO2019202779A1 WO 2019202779 A1 WO2019202779 A1 WO 2019202779A1 JP 2018048027 W JP2018048027 W JP 2018048027W WO 2019202779 A1 WO2019202779 A1 WO 2019202779A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- base
- ball screw
- screw
- screw shaft
- axial direction
- Prior art date
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B3/00—General-purpose turning-machines or devices, e.g. centre lathes with feed rod and lead screw; Sets of turning-machines
- B23B3/22—Turning-machines or devices with rotary tool heads
- B23B3/24—Turning-machines or devices with rotary tool heads the tools of which do not perform a radial movement; Rotary tool heads therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q5/00—Driving or feeding mechanisms; Control arrangements therefor
- B23Q5/22—Feeding members carrying tools or work
- B23Q5/34—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission
- B23Q5/38—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission feeding continuously
- B23Q5/40—Feeding other members supporting tools or work, e.g. saddles, tool-slides, through mechanical transmission feeding continuously by feed shaft, e.g. lead screw
- B23Q5/404—Screw bearings therefor
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H25/22—Screw mechanisms with balls, rollers, or similar members between the co-operating parts; Elements essential to the use of such members
- F16H25/2204—Screw mechanisms with balls, rollers, or similar members between the co-operating parts; Elements essential to the use of such members with balls
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H25/00—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms
- F16H25/18—Gearings comprising primarily only cams, cam-followers and screw-and-nut mechanisms for conveying or interconverting oscillating or reciprocating motions
- F16H25/20—Screw mechanisms
- F16H2025/2062—Arrangements for driving the actuator
- F16H2025/2075—Coaxial drive motors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Transmission Devices (AREA)
- Supporting Of Heads In Record-Carrier Devices (AREA)
- Glass Compositions (AREA)
- Soil Working Implements (AREA)
Abstract
ボールねじを交換する作業を軽減させることが可能な工作機械を提供する。工作機械(1)は、基台5、移動体6、ナット7n及びねじ軸7sを有するボールねじ7、ねじ軸7sの端部72を覆って中心線AX0を中心としたねじ軸7sの回転を許容するキャップ部材8、並びに、基台5に設けられてキャップ部材8を支持する支持部9を備える。キャップ部材8は、本体部81、及び、該本体部81よりも軸方向D1における外側D1oにおいて本体部81よりも広がったフランジ部85を有する。支持部9は、基台5に設けられている状態でねじ軸7sを軸方向D1と直交する方向D2へ通過させる開口96が設けられて本体部81を受け入れる凹部95、及び、該凹部95が本体部81を受け入れている状態で軸方向D1においてフランジ部85の内側の面86が突き当たる位置決め部91を有する。
Description
本発明は、ボールねじを用いた駆動機構により移動体を移動させる工作機械に関する。
基台に対して主軸台を移動させる工作機械として、サーボモーターにより回転駆動されるねじ軸を有するボールねじを有するNC(数値制御)旋盤が知られている。ねじ軸の一端は、サーボモーターから回転駆動力を伝達されるトルク伝達機構に取り付けられている。ねじ軸の他端は、基台上に取り付けられた支持部材の貫通穴に挿入されて支持部材に対して回転可能に支持されている。
参考として、特許文献1には、真空チャンバ内に直動テーブル装置を設置した真空精密位置決め装置が開示されている。この真空精密位置決め装置の直動テーブル装置では、ベース上に取り付けられたサポートブラケットの装着口にサポートユニットを介してねじ軸の端部が回転可能に支持されている。サポートブラケットの装着口の開口部はベースに向いているため、装着口は閉じている。
長期間の使用等により、ボールねじを交換する場合がある。ボールねじの一端はサーボモーターに繋がっているトルク伝達機構に取り付けられているため、旋盤からボールねじを取り外す時、主軸台からボールねじナットを外し、ボールねじの一端をトルク伝達機構から引き抜く必要がある。ここで、ねじ軸にボールねじナットを取り付けておく必要があるので、旋盤からボールねじを取り外すためには、ボールねじを傾けてサーボモーターの方へ引き出す必要がある。このため、ボールねじの他端を支持している支持部材を基台から取り外す必要がある。旋盤にボールねじを取り付ける時には、まず、ボールねじを傾けて主軸台のボールねじナット用の貫通穴に通してボールねじの他端を支持部材の貫通穴に挿入して支持部材に取り付ける必要がある。そのうえで、ボールねじの一端をトルク伝達機構に差し込み、ボールねじの取り付け姿勢、すなわち、平行度を調整したり確認したりしたうえで基台に支持部材を固定してから、ボールねじの位置を微調整する必要がある。特に、ボールねじの取り付け姿勢の調整や確認をしながら支持部材を固定する作業は、技量や経験を有する作業者が行う必要がある。
尚、上述のような問題は、NC旋盤に限らず、NC旋盤以外の種々の工作機械にも存在する。
本発明は、ボールねじを交換する作業を軽減させることが可能な工作機械を開示するものである。
本発明は、ボールねじを交換する作業を軽減させることが可能な工作機械を開示するものである。
本発明の工作機械は、基台と、
該基台に対して所定の軸方向へ移動可能に配置された移動体と、
該移動体に固定されたナット、及び、前記軸方向に向いた中心線を中心として回転することにより前記ナットを前記軸方向へ移動させるねじ軸を有するボールねじと、
前記ねじ軸の端部を覆い、前記中心線を中心とした前記ねじ軸の回転を許容するキャップ部材と、
前記基台に設けられ、前記キャップ部材を支持する支持部と、を備え、
前記キャップ部材は、本体部、及び、該本体部よりも前記軸方向における外側において前記本体部よりも広がったフランジ部を有し、
前記支持部は、前記基台に設けられている状態で前記ねじ軸を前記軸方向と直交する方向へ通過させる開口が設けられて前記本体部を受け入れる凹部、及び、該凹部が前記本体部を受け入れている状態で前記軸方向において前記フランジ部の内側の面が突き当たる位置決め部を有する、態様を有する。
該基台に対して所定の軸方向へ移動可能に配置された移動体と、
該移動体に固定されたナット、及び、前記軸方向に向いた中心線を中心として回転することにより前記ナットを前記軸方向へ移動させるねじ軸を有するボールねじと、
前記ねじ軸の端部を覆い、前記中心線を中心とした前記ねじ軸の回転を許容するキャップ部材と、
前記基台に設けられ、前記キャップ部材を支持する支持部と、を備え、
前記キャップ部材は、本体部、及び、該本体部よりも前記軸方向における外側において前記本体部よりも広がったフランジ部を有し、
前記支持部は、前記基台に設けられている状態で前記ねじ軸を前記軸方向と直交する方向へ通過させる開口が設けられて前記本体部を受け入れる凹部、及び、該凹部が前記本体部を受け入れている状態で前記軸方向において前記フランジ部の内側の面が突き当たる位置決め部を有する、態様を有する。
本発明によれば、ボールねじを交換する作業を軽減させる工作機械を提供することができる。
以下、本発明の実施形態を説明する。むろん、以下の実施形態は本発明を例示するものに過ぎず、実施形態に示す特徴の全てが発明の解決手段に必須になるとは限らない。
(1)本発明に含まれる技術の概要:
まず、図1~7に示される例を参照して本発明に含まれる技術の概要を説明する。尚、本願の図は模式的に例を示す図であり、これらの図に示される各方向の拡大率は異なることがあり、各図は整合していないことがある。むろん、本技術の各要素は、符号で示される具体例に限定されない。
まず、図1~7に示される例を参照して本発明に含まれる技術の概要を説明する。尚、本願の図は模式的に例を示す図であり、これらの図に示される各方向の拡大率は異なることがあり、各図は整合していないことがある。むろん、本技術の各要素は、符号で示される具体例に限定されない。
[態様1]
本技術の一態様に係る工作機械(例えば旋盤1)は、基台5、該基台5に対して所定の軸方向D1へ移動可能に配置された移動体6、ボールねじ7、キャップ部材8、並びに、支持部9を備える。前記ボールねじ7は、前記移動体6に固定されたナット7n、及び、前記軸方向D1に向いた中心線AX0を中心として回転することにより前記ナット7nを前記軸方向D1へ移動させるねじ軸7sを有する。前記キャップ部材8は、前記ねじ軸7sの端部72を覆い、前記中心線AX0を中心とした前記ねじ軸7sの回転を許容する。支持部9は、前記基台5に設けられ、前記キャップ部材8を支持している。前記キャップ部材8は、本体部81、及び、該本体部81よりも前記軸方向D1における外側D1oにおいて前記本体部81よりも広がったフランジ部85を有している。前記支持部9は、前記基台5に設けられている状態で前記ねじ軸7sを前記軸方向D1と直交する方向D2へ通過させる開口96が設けられて前記本体部81を受け入れる凹部95、及び、該凹部95が前記本体部81を受け入れている状態で前記軸方向D1において前記フランジ部85の内側の面86が突き当たる位置決め部91を有している。
本技術の一態様に係る工作機械(例えば旋盤1)は、基台5、該基台5に対して所定の軸方向D1へ移動可能に配置された移動体6、ボールねじ7、キャップ部材8、並びに、支持部9を備える。前記ボールねじ7は、前記移動体6に固定されたナット7n、及び、前記軸方向D1に向いた中心線AX0を中心として回転することにより前記ナット7nを前記軸方向D1へ移動させるねじ軸7sを有する。前記キャップ部材8は、前記ねじ軸7sの端部72を覆い、前記中心線AX0を中心とした前記ねじ軸7sの回転を許容する。支持部9は、前記基台5に設けられ、前記キャップ部材8を支持している。前記キャップ部材8は、本体部81、及び、該本体部81よりも前記軸方向D1における外側D1oにおいて前記本体部81よりも広がったフランジ部85を有している。前記支持部9は、前記基台5に設けられている状態で前記ねじ軸7sを前記軸方向D1と直交する方向D2へ通過させる開口96が設けられて前記本体部81を受け入れる凹部95、及び、該凹部95が前記本体部81を受け入れている状態で前記軸方向D1において前記フランジ部85の内側の面86が突き当たる位置決め部91を有している。
上記態様1では、ねじ軸7sの端部72を覆っているキャップ部材8の本体部81を受け入れる支持部9の凹部95は、支持部9が基台5に設けられている状態でねじ軸7sを軸方向D1と直交する方向D2へ通過させる開口96を有している。これにより、機械からボールねじ7を取り外す時、支持部9を基台5から取り外さなくてもねじ軸7sを凹部95の開口96の方へ容易に傾けてボールねじ7を完全に引き出すことができる。機械にボールねじ7を取り付ける時にも、支持部9を基台5から取り外さなくても凹部95に入れたねじ軸7sを開口96の方へ容易に傾けてから所定の位置にボールねじ7を配置することができる。また、ねじ軸7sの端部72をキャップ部材8で覆って本体部81を凹部95に入れ、軸方向D1においてフランジ部85の内側の面86を支持部9の位置決め部91に突き当てると、ボールねじ7の取り付け姿勢が決まる。
以上のように、ボールねじ交換時に基台5から支持部9を取り外す必要が無いので、ボールねじ7の取り付け姿勢を調整したり確認したりするという技量や経験を要する作業が不要となる。従って、本態様は、ボールねじを交換する作業を軽減させることが可能な工作機械を提供することができる。
以上のように、ボールねじ交換時に基台5から支持部9を取り外す必要が無いので、ボールねじ7の取り付け姿勢を調整したり確認したりするという技量や経験を要する作業が不要となる。従って、本態様は、ボールねじを交換する作業を軽減させることが可能な工作機械を提供することができる。
ここで、移動体には、主軸台とともに移動する台、刃物台とともに移動する台、等が含まれる。
支持部は、基台に対して着脱可能な別部材でもよいし、基台と一体に形成された部位でもよい。
支持部における凹部の開口の向きには、基台から離れる向き、基台に沿った向き、等が含まれる。
尚、上述した付言は、以下の態様においても適用される。
支持部は、基台に対して着脱可能な別部材でもよいし、基台と一体に形成された部位でもよい。
支持部における凹部の開口の向きには、基台から離れる向き、基台に沿った向き、等が含まれる。
尚、上述した付言は、以下の態様においても適用される。
(2)工作機械の構成の具体例:
図1は、工作機械の例として主軸移動型のNC(数値制御)旋盤1の構成を模式的に例示している。図1は、本技術を説明するために簡略化した一例を示しているに過ぎず、本技術を限定するものではない。尚、各部の位置関係の説明は、例示に過ぎない。従って、左右方向を上下方向又は前後方向に変更したり、上下方向を左右方向や前後方向に変更したり、前後方向を左右方向や上下方向に変更したり、回転方向を逆方向に変更したり等することも、本技術に含まれる。また、方向や位置等の同一は、厳密な一致に限定されず、誤差により厳密な一致からずれることを含む。
図1は、工作機械の例として主軸移動型のNC(数値制御)旋盤1の構成を模式的に例示している。図1は、本技術を説明するために簡略化した一例を示しているに過ぎず、本技術を限定するものではない。尚、各部の位置関係の説明は、例示に過ぎない。従って、左右方向を上下方向又は前後方向に変更したり、上下方向を左右方向や前後方向に変更したり、前後方向を左右方向や上下方向に変更したり、回転方向を逆方向に変更したり等することも、本技術に含まれる。また、方向や位置等の同一は、厳密な一致に限定されず、誤差により厳密な一致からずれることを含む。
図1に示す旋盤1は、ベッド2上に、ワークW0を把持する主軸11を設けた主軸台10、ワークW0を切削する工具T0を保持する刃物台20、主軸台10をX1軸方向とZ1軸方向へ駆動する主軸台駆動部、刃物台20をX2軸方向とZ2軸方向へ駆動する刃物台駆動部、NC装置3、等を備えている。ベッド2、主軸台10、刃物台20、及び、工具T0の主要部は、例えば金属で形成することができる。NC装置3は、例えば、NCプログラムが記憶されたRAM(Random Access Memory)、NCプログラムを解釈して実行するための解釈実行プログラムが記憶されたROM(Read Only Memory)、解釈実行プログラムを実行するCPU(Central Processing Unit)、タイマー回路、インターフェイス、等を有する。NC装置3は、NCプログラムに従って、主軸台10、刃物台20、主軸台駆動部、刃物台駆動部、等の動作を制御する。
主軸台10は、主軸中心線AXsに沿ったZ1軸方向、及び、このZ1軸方向に直交するX1軸方向へ移動可能とされている。主軸台10に設けられた主軸11は、Z1軸方向へ挿入された円柱状(棒状)のワークW0をコレット(不図示)で解放可能に把持し、ワークW0の長手方向に沿う主軸中心線AXsを中心としてワークW0を回転させる。
刃物台20は、ワークW0を切削するための工具T0を1以上保持し、X1軸方向に沿ったX2軸方向、及び、Z1軸方向に沿ったZ2軸方向へ移動可能とされている。刃物台には、タレット刃物台、櫛型刃物台、等を用いることができる。
図1に示す主軸台駆動部は、主軸台10を設置したX1軸方向スライド台31をX1軸方向へ駆動するX1軸駆動要素(X1軸モーターM11、ボールねじ31b、等)、及び、X1軸方向スライド台31を設置したZ1軸方向スライド台32をZ1軸方向へ駆動するZ1軸駆動要素(Z1軸モーターM12、ボールねじ32b、等)を備えている。
X1軸方向スライド台31は、後述するZ1軸方向スライド台32に設置された一対のレール31rとX1軸方向へスライド可能に嵌合した一対のガイド部材31gを有し、ナット31nが着脱可能に固定されている。ボールねじ31bは、ねじ軸31sとナット31nがボール(不図示)を介して作動する機械部品である。ねじ軸31sは、X1軸方向に向いた中心線を中心として回転することによりナット31nをX1軸方向へ移動させる。サーボモーターであるX1軸モーターM11は、Z1軸方向スライド台32に設置され、NC装置3からの指令に従ってねじ軸31sを回転駆動する。前記ボールねじ31bにより、X1軸方向スライド台31とともに主軸台10がX1軸方向へ移動する。
Z1軸モーターM12は、ベッド2に設置された一対のレール32rとZ1軸方向へスライド可能に嵌合した一対のガイド部材32gを有し、ナット32nが着脱可能に固定されている。ボールねじ32bは、ねじ軸32sとナット32nがボール(不図示)を介して作動する機械部品である。ねじ軸32sは、Z1軸方向に向いた中心線を中心として回転することによりナット32nをZ1軸方向へ移動させる。サーボモーターであるZ1軸モーターM12は、ベッド2に設置され、NC装置3からの指令に従ってねじ軸32sを回転駆動する。前記ボールねじ32bにより、Z1軸方向スライド台32とともに主軸台10がZ1軸方向へ移動する。
むろん、X1軸駆動要素をZ1軸駆動要素によりZ1軸方向へ移動させる代わりに、Z1軸駆動要素をX1軸駆動要素によりX1軸方向へ移動させてもよい。
むろん、X1軸駆動要素をZ1軸駆動要素によりZ1軸方向へ移動させる代わりに、Z1軸駆動要素をX1軸駆動要素によりX1軸方向へ移動させてもよい。
図1に示す刃物台駆動部は、刃物台20を設置したX2軸方向スライド台41をX2軸方向へ駆動するX2軸駆動要素(X2軸モーターM21、ボールねじ41b、等)、及び、X2軸方向スライド台41を設置したZ2軸方向スライド台42をZ2軸方向へ駆動するZ2軸駆動要素(Z2軸モーターM22、ボールねじ42b、等)を備えている。
X2軸方向スライド台41は、後述するZ2軸方向スライド台42に設置された一対のレール41rとX2軸方向へスライド可能に嵌合した一対のガイド部材41gを有し、ナット41nが着脱可能に固定されている。ボールねじ41bは、ねじ軸41sとナット41nがボール(不図示)を介して作動する機械部品である。ねじ軸41sは、X2軸方向に向いた中心線を中心として回転することによりナット41nをX2軸方向へ移動させる。サーボモーターであるX2軸モーターM21は、Z2軸方向スライド台42に設置され、NC装置3からの指令に従ってねじ軸41sを回転駆動する。前記ボールねじ41bにより、X2軸方向スライド台41とともに刃物台20がX2軸方向へ移動する。
Z2軸方向スライド台42は、ベッド2に設置された一対のレール42rとZ2軸方向へスライド可能に嵌合した一対のガイド部材42gを有し、ナット42nが着脱可能に固定されている。ボールねじ42bは、ねじ軸42sとナット42nがボール(不図示)を介して作動する機械部品である。ねじ軸42sは、Z2軸方向に向いた中心線を中心として回転することによりナット42nをZ2軸方向へ移動させる。サーボモーターであるZ2軸モーターM22は、ベッド2に設置され、NC装置3からの指令に従ってねじ軸42sを回転駆動する。前記ボールねじ42bにより、Z2軸方向スライド台42とともに刃物台20がZ2軸方向へ移動する。
むろん、X2軸駆動要素をZ2軸駆動要素によりZ2軸方向へ移動させる代わりに、Z2軸駆動要素をX2軸駆動要素によりX2軸方向へ移動させてもよい。
むろん、X2軸駆動要素をZ2軸駆動要素によりZ2軸方向へ移動させる代わりに、Z2軸駆動要素をX2軸駆動要素によりX2軸方向へ移動させてもよい。
また、上述した案内はレールとガイド部材との組合せであるが、工作機械に用いられる案内は、レールとガイド部材との組合せに限定されず、アリとアリ溝との組合せ等でもよい。
ここで、本技術の基台及び移動体は、相対的な位置関係で決まる。例えば、移動体が主軸台10を設置したX1軸方向スライド台31である場合、基台はZ1軸方向スライド台32となる。移動体がZ1軸方向スライド台32である場合、基台はベッド2となる。移動体が刃物台20を設置したX2軸方向スライド台41である場合、基台はZ2軸方向スライド台42となる。移動体がZ2軸方向スライド台42である場合、基台はベッド2となる。
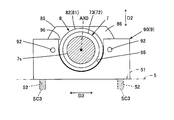
図2A~2Dは、基台5、移動体6、ボールねじ7、キャップ部材8、及び、支持部9を有する工作機械の例を模式的に示している。図2A~2Dは、ボールねじ7を交換する例も模式的に示している。図3は、ボールねじ7の端部72及びその周辺の例を分解して示している。図4は、ボールねじ7の端部72及びその周辺の例を図2のA1の位置で断面視して示している。図5は、ボールねじ7の端部72及びその周辺の例を支持部9における凹部95の開口96の側から見た状態を示している。
これらの図において、基台5は、図1で示したベッド2、Z1軸方向スライド台32、及び、Z2軸方向スライド台42のいずれかに相当する。移動体6は、主軸台10を設置したX1軸方向スライド台31、X1軸方向スライド台31を設置したZ1軸方向スライド台32、刃物台20を設置したX2軸方向スライド台41、及び、X2軸方向スライド台41を設置したZ2軸方向スライド台42のいずれかに相当する。ボールねじ7は、図1で示したボールねじ31b,32b,41b,42bのいずれかに相当する。すなわち、ボールねじ7のナット7nはナット31n,32n,41n,42nのいずれかに相当し、ボールねじ7のねじ軸7sはねじ軸31s,32s,41s,42sのいずれかに相当する。また、基台5に設置されたサーボモーターM0は、図1で示したモーターM11,M12,M21,M22のいずれかに相当する。
これらの図において、基台5は、図1で示したベッド2、Z1軸方向スライド台32、及び、Z2軸方向スライド台42のいずれかに相当する。移動体6は、主軸台10を設置したX1軸方向スライド台31、X1軸方向スライド台31を設置したZ1軸方向スライド台32、刃物台20を設置したX2軸方向スライド台41、及び、X2軸方向スライド台41を設置したZ2軸方向スライド台42のいずれかに相当する。ボールねじ7は、図1で示したボールねじ31b,32b,41b,42bのいずれかに相当する。すなわち、ボールねじ7のナット7nはナット31n,32n,41n,42nのいずれかに相当し、ボールねじ7のねじ軸7sはねじ軸31s,32s,41s,42sのいずれかに相当する。また、基台5に設置されたサーボモーターM0は、図1で示したモーターM11,M12,M21,M22のいずれかに相当する。
基台5は、図2A,4に示すように、支持部9の例である支持部材90を複数のねじSC3により取り付けるための取付部51を有している。取付部51は、各ねじSC3と螺合するねじ穴52を有している。
移動体6は、図2A~2Dに示すように、基台5に対して所定の軸方向D1へ移動可能に配置されている。軸方向D1は、ボールねじ7のねじ軸7sの中心線AX0に沿った方向である。移動体6は、本体61、及び、ボールねじ7のナット7nを装着するための貫通穴63が設けられたブラケット62を有している。ブラケット62は、本体61から下方、すなわち、ねじ軸7sの方へ突出している。貫通穴63は、ブラケット62に対して軸方向D1へ貫通している。ナット7nが貫通穴63に挿入されてブラケット62に対してねじSC1により固定されることにより、ナット7nとともに移動体6が軸方向D1における双方向へ移動する。
ボールねじ7は、図2Aに示すように、ボール(不図示)を介して互いに螺合しているナット7n及びねじ軸7sを有している。ねじ軸7sは、軸方向D1に向いた中心線AX0を中心として回転することにより、移動体6に固定されたナット7nを軸方向D1へ移動させる。ねじ軸7sの一方の端部71は、モーター支持部材MSの中においてトルク伝達機構であるカップリングC0を介してモーターM0に接続されている。ねじ軸7sの他方の端部72には、転がり軸受73が外嵌めされてロックナット74により固定されている。この状態で端部72がキャップ部材8の本体部81の凹部83に挿入されて支持部材90とキャップ部材8とにより位置決めされている。軸受73には、ボールベアリング、ローラーベアリング、等を用いることができる。
カップリングC0は、モーターM0の軸部材Maとねじ軸7sの端部71とを連結し、軸部材Maの回転とともに中心線AX0を中心として回転してねじ軸7sを回転させる。カップリングC0には、ねじを締めることにより軸(軸部材Ma又は端部71)と結合されるハブを有するシュパンリング等を用いることができる。シュパンリングは、くさび形の摩擦締結要素であり、ねじを軸方向へ締めると軸とハブとの摩擦力が増大して軸とハブとが結合される。モーターM0は、基台5上に取り付けられたモーター支持部材MSにより支持され、NC装置3からの指令に従ってカップリングC0を介してねじ軸7sを回転駆動する。前記ボールねじ7により、ナット7nとともに移動体6が軸方向D1へ移動する。
キャップ部材8は、図3~5に示すように、支持部材90の凹部95に入る本体部81、及び、支持部材90の凹部95に入らず本体部81よりも軸方向D1における外側D1oに出ているフランジ部85を有している。本体部81は、ねじ軸7sにおいて軸受73が外嵌めされた端部72が挿入された断面円形の凹部83を有し、ねじ軸7sの端部72を覆っている。これにより、本体部81は、中心線AX0を中心としたねじ軸7sの回転を許容している。本体部81の外側面82は、側面視円形であり、支持部材90の凹部95の曲面部よりも若干小さくされている。これは、本体部81を凹部95に入れてフランジ部85を位置決め部91に当てることによりボールねじ7の取り付け姿勢が決まった状態で軸方向D1と直交する方向(ここでは図3,4に示す方向D2、及び、両方向D1,D2と直交する方向D3)におけるボールねじ7の位置を微調整するためである。従って、通常、本体部81と凹部95との間に若干の隙間が生じる。フランジ部85は、中心線AX0を中心として本体部81よりも径方向へ広がっており、複数のねじSC2をそれぞれ軸方向D1へ通すためのねじ挿通穴87を有している。フランジ部85の内側の面86は、支持部材90の位置決め部91に接触している。ねじ挿通穴87の直径は、ねじSC2の直径よりも大きくされている。これは、前述の通り、ボールねじ7の取り付け姿勢が決まった状態でボールねじ7の位置を微調整してねじSC2によりキャップ部材8を固定するためである。
尚、凹部83は、フランジ部85にまで入り込んでいてもよい。
尚、凹部83は、フランジ部85にまで入り込んでいてもよい。
支持部9の例である支持部材90は、図3~5に示すように、各ねじSC2に螺合するねじ穴92、複数のねじSC3のそれぞれを通すためのねじ挿通穴93、本体部81を受け入れる凹部95、及び、フランジ部85の内側の面86が突き当たる面状の位置決め部91を有している。図3には、各ねじSC2が座金WA1とねじ挿通穴87を通ってねじ穴92に螺合することが示されている。各ねじ挿通穴93は、軸方向D1と直交する方向D2へ貫通している。ねじ挿通穴93の直径は、ねじSC3の直径よりも大きくされている。これは、フランジ部85の内側の面86が突き当たる位置決め部91をボールねじ7の取り付け姿勢が決まる鉛直面にしてねじSC3により支持部材90を固定するためである。位置決め部91を鉛直面にして各ねじSC3をねじ挿通穴93に通して基台5の取付部51のねじ穴52に螺合させると、支持部材90が取付部51上に固定され、この支持部材90がキャップ部材8を支持することができる。凹部95は、略U字状であり、支持部材90が取付部51に固定されている状態でキャップ部材8の本体部81を軸方向D1と直交する方向D2へ通過させることが可能な開口96を有し、キャップ部材8の本体部81を受け入れる。上述の通り、凹部95の曲面部は、本体部81の外側面82よりも若干大きくされている。開口96は、基台5とは反対の方向に向いている。従って、開口96は、支持部材90が取付部51に固定されている状態でねじ軸7sを軸方向D1と直交する方向D2へ通過させることが可能である。位置決め部91は、支持部材90において軸方向D1における外側の面にあり、凹部95が本体部81を受け入れている状態で軸方向D1においてフランジ部85の内側の面86が突き当たる。
(3)ボールねじの交換方法の具体例:
以下、図2A~2D等を参照して、ボールねじ7の交換方法の例を説明する。
図2Aに示す使用状態の工作機械からボールねじ7を取り外す時、まず、移動体6のブラケット62からねじSC1を外してブラケット62とナット7nとの固定を解除させる。これにより、図2Bに示すように、移動体6をレール(不図示)に沿って支持部材90側へ動かすことができる。また、ねじ軸7sの一方の端部71とカップリングC0とを結合しているねじを緩め、ねじ軸7sの他方の端部72近傍にあるねじSC2を外して支持部材90とキャップ部材8との固定を解除する。すると、図2Cに示すように、カップリングC0からねじ軸7sの一方の端部71を引き抜くことができ、キャップ部材8とともにボールねじ7を軸方向D1における外側D1oへある程度引き出すことができる。ただ、ナット7nとキャップ部材8との間でねじ軸7sが移動体6のブラケット62を貫通しているので、軸方向D1における外側D1oへボールねじ7を完全に引き出すことはできない。むろん、ねじ軸7sにおける一方の端部71の側には基台5上の大きな構造物であるモーターM0とモーター支持部材MSがあるため、ねじ軸7sを傾けない限りボールねじ7をモーターM0側へ引き出すことはできない。
以下、図2A~2D等を参照して、ボールねじ7の交換方法の例を説明する。
図2Aに示す使用状態の工作機械からボールねじ7を取り外す時、まず、移動体6のブラケット62からねじSC1を外してブラケット62とナット7nとの固定を解除させる。これにより、図2Bに示すように、移動体6をレール(不図示)に沿って支持部材90側へ動かすことができる。また、ねじ軸7sの一方の端部71とカップリングC0とを結合しているねじを緩め、ねじ軸7sの他方の端部72近傍にあるねじSC2を外して支持部材90とキャップ部材8との固定を解除する。すると、図2Cに示すように、カップリングC0からねじ軸7sの一方の端部71を引き抜くことができ、キャップ部材8とともにボールねじ7を軸方向D1における外側D1oへある程度引き出すことができる。ただ、ナット7nとキャップ部材8との間でねじ軸7sが移動体6のブラケット62を貫通しているので、軸方向D1における外側D1oへボールねじ7を完全に引き出すことはできない。むろん、ねじ軸7sにおける一方の端部71の側には基台5上の大きな構造物であるモーターM0とモーター支持部材MSがあるため、ねじ軸7sを傾けない限りボールねじ7をモーターM0側へ引き出すことはできない。
ここで、支持部材90の凹部95は、支持部材90が基台5に取り付けられている状態でねじ軸7sを軸方向D1と直交する方向D2へ通過させる開口96を有している。これにより、図2Dに示すように、ねじ軸7sを開口96の方へ傾けるように一方の端部71を上側、すなわち、基台5から離れる側に容易に動かすことができる。ねじ軸7sの他方の端部72からキャップ部材8を外すことにより、ねじ軸7sの他方の端部72をブラケット62の貫通穴63から引き抜いてボールねじ7をモーターM0側へ完全に引き出すことができる。
以上より、工作機械からボールねじ7を取り外す時、支持部材90を基台5から取り外さなくてもねじ軸7sを凹部95の開口96の方へ容易に傾けてボールねじ7を完全に引き出すことができる。
以上より、工作機械からボールねじ7を取り外す時、支持部材90を基台5から取り外さなくてもねじ軸7sを凹部95の開口96の方へ容易に傾けてボールねじ7を完全に引き出すことができる。
工作機械にボールねじ7を取り付ける時には、上述した取り外し手順とは逆の手順で作業を行えばよい。まず、図2Dに示すように、ねじ軸7sの一方の端部71を上側に傾けてねじ軸7sの他方の端部72をブラケット62の貫通穴63に通す。支持部材90の凹部95は支持部材90が基台5に取り付けられている状態でねじ軸7sを傾けている側に開口96を有しているので、支持部材90を基台5から取り外す必要は無い。次に、図2Cに示すように、ねじ軸7sの端部72にキャップ部材8を取り付け、ねじ軸7sの一方の端部71をカップリングC0に差し込み、キャップ部材8の本体部81を支持部材90の凹部95に入れる。ここで、支持部材90は基台5に取り付けられたままであるので、支持部材90の位置決め部91が鉛直面に保たれている。従って、軸方向D1においてフランジ部85の内側の面86を支持部材90の位置決め部91に突き当てると、ボールねじ7の取り付け姿勢が決まる。この状態で軸方向D1と直交する方向(ここでは図3,4に示す方向D2,D3)におけるボールねじ7の位置を微調整してねじSC2によりキャップ部材8を固定すると、ボールねじ7の取り付けが完了する。
支持部材が基台に取り付けられている状態でねじ軸を通過させる開口を有していない場合、ねじ軸が支持部材に干渉するため、ボールねじを傾け難い。この場合、ボールねじを交換するためには、基台から支持部材を取り外す必要がある。しかし、新たなボールねじの一端をカップリングに差し込んで支持部材を基台に取り付ける時、ピックテスターを用いて軸送り運動をさせながらねじ軸の平行度を確認するといった、ボールねじの取り付け姿勢を調整したり確認したりする作業を行ったうえで基台に支持部材を固定する必要がある。従って、このような作業は、技量や経験を有する作業者が行う必要がある。
本具体例では、ボールねじ交換時に基台から支持部材を取り外す必要が無いので、ボールねじの取り付け姿勢を調整したり確認したりするという技量や経験を要する作業が不要となる。支持部材の位置決め部にキャップ部材のフランジ部を当てることによりボールねじの取り付け姿勢が決まるので、作業者は、ボールねじの位置を微調整してキャップ部材を支持部材に固定すればよい。従って、本具体例は、作業者の技量や経験によらずボールねじを交換する作業を軽減することができる。
また、図4に示すように、支持部材90の凹部95が開口96を有していることにより、支持部材90がねじ軸7sを囲む必要が無く、支持部材90の高さが低くて済む。従って、本具体例は、支持部をコンパクトにすることができる。
また、図4に示すように、支持部材90の凹部95が開口96を有していることにより、支持部材90がねじ軸7sを囲む必要が無く、支持部材90の高さが低くて済む。従って、本具体例は、支持部をコンパクトにすることができる。
(4)変形例:
本発明は、種々の変形例が考えられる。
例えば、工作機械は、主軸固定型のNC旋盤等でもよい。
支持部9は、基台5から取り外す必要が無いので、基台5と一体に形成された部位でもよい。
支持部9における凹部95の開口96の向きは、基台5とは反対の向きに限定されない。例えば、支持部における凹部の開口の向きが軸方向D1と直交する水平方向、すなわち、基台に沿った方向でも、ねじ軸を開口の側へ傾けることにより基台から支持部を取り外さなくてもボールねじを交換することができる。むろん、支持部における凹部の開口の向きは、ねじ軸が開口を通過することができる限り、鉛直方向や水平方向からずれた向きでもよい。
本発明は、種々の変形例が考えられる。
例えば、工作機械は、主軸固定型のNC旋盤等でもよい。
支持部9は、基台5から取り外す必要が無いので、基台5と一体に形成された部位でもよい。
支持部9における凹部95の開口96の向きは、基台5とは反対の向きに限定されない。例えば、支持部における凹部の開口の向きが軸方向D1と直交する水平方向、すなわち、基台に沿った方向でも、ねじ軸を開口の側へ傾けることにより基台から支持部を取り外さなくてもボールねじを交換することができる。むろん、支持部における凹部の開口の向きは、ねじ軸が開口を通過することができる限り、鉛直方向や水平方向からずれた向きでもよい。
支持部9に対するキャップ部材8の固定は、ねじSC2による固定に限定されず、他のケースを利用した固定、図6に示す爪部材による固定、等でもよい。
図6は、支持部9にキャップ部材8を固定する別の例をフランジ部85の側から見た状態を示している。図6に示す支持部材90は、傾動可能な複数の爪部材110を有している。各爪部材110は、実線部のように立てると位置決め部91との間にフランジ部85を保持し、二点鎖線部のように倒すとフランジ部85の保持を解放する。この場合でも、軸方向D1においてフランジ部85の内側の面86が支持部材90の位置決め部91に突き当てられることにより、ボールねじ7の取り付け姿勢が決まる。
図6は、支持部9にキャップ部材8を固定する別の例をフランジ部85の側から見た状態を示している。図6に示す支持部材90は、傾動可能な複数の爪部材110を有している。各爪部材110は、実線部のように立てると位置決め部91との間にフランジ部85を保持し、二点鎖線部のように倒すとフランジ部85の保持を解放する。この場合でも、軸方向D1においてフランジ部85の内側の面86が支持部材90の位置決め部91に突き当てられることにより、ボールねじ7の取り付け姿勢が決まる。
また、キャップ部材の本体部の外側面は断面円形に限定されず、同様に、支持部の凹部の形状も限定されない。図7は、ボールねじの端部及びその周辺の別の例を図2のA1の位置で断面視して示している。図7に示す支持部材90の凹部95は、側面視矩形状である。キャップ部材8の本体部81における外側面82の下側は、矩形状の凹部95に合わせられた形状とされている。この場合でも、軸方向D1においてフランジ部85の内側の面86が支持部材90の位置決め部91に突き当てられることにより、ボールねじ7の取り付け姿勢が決まる。
(5)結び:
以上説明したように、本発明によると、種々の態様により、ボールねじを交換する作業を軽減させることが可能な工作機械等の技術を提供することができる。むろん、独立請求項に係る構成要件のみからなる技術でも、上述した基本的な作用、効果が得られる。
また、上述した例の中で開示した各構成を相互に置換したり組み合わせを変更したりした構成、公知技術及び上述した例の中で開示した各構成を相互に置換したり組み合わせを変更したりした構成、等も実施可能である。本発明は、これらの構成等も含まれる。
以上説明したように、本発明によると、種々の態様により、ボールねじを交換する作業を軽減させることが可能な工作機械等の技術を提供することができる。むろん、独立請求項に係る構成要件のみからなる技術でも、上述した基本的な作用、効果が得られる。
また、上述した例の中で開示した各構成を相互に置換したり組み合わせを変更したりした構成、公知技術及び上述した例の中で開示した各構成を相互に置換したり組み合わせを変更したりした構成、等も実施可能である。本発明は、これらの構成等も含まれる。
1…旋盤(工作機械の例)、2…ベッド、5…基台、6…移動体、
7…ボールねじ、7n…ナット、7s…ねじ軸、
8…キャップ部材、9…支持部、
51…取付部、
61…本体、62…ブラケット、63…貫通穴、
71,72…端部、73…軸受、74…ロックナット、
81…本体部、82…外側面、83…凹部、85…フランジ部、86…内側の面、
90…支持部材、91…位置決め部、95…凹部、96…開口、
AX0…中心線、
D1…軸方向、D1o…外側、D2…軸方向と直交する方向。
7…ボールねじ、7n…ナット、7s…ねじ軸、
8…キャップ部材、9…支持部、
51…取付部、
61…本体、62…ブラケット、63…貫通穴、
71,72…端部、73…軸受、74…ロックナット、
81…本体部、82…外側面、83…凹部、85…フランジ部、86…内側の面、
90…支持部材、91…位置決め部、95…凹部、96…開口、
AX0…中心線、
D1…軸方向、D1o…外側、D2…軸方向と直交する方向。
Claims (1)
- 基台と、
該基台に対して所定の軸方向へ移動可能に配置された移動体と、
該移動体に固定されたナット、及び、前記軸方向に向いた中心線を中心として回転することにより前記ナットを前記軸方向へ移動させるねじ軸を有するボールねじと、
前記ねじ軸の端部を覆い、前記中心線を中心とした前記ねじ軸の回転を許容するキャップ部材と、
前記基台に設けられ、前記キャップ部材を支持する支持部と、を備え、
前記キャップ部材は、本体部、及び、該本体部よりも前記軸方向における外側において前記本体部よりも広がったフランジ部を有し、
前記支持部は、前記基台に設けられている状態で前記ねじ軸を前記軸方向と直交する方向へ通過させる開口が設けられて前記本体部を受け入れる凹部、及び、該凹部が前記本体部を受け入れている状態で前記軸方向において前記フランジ部の内側の面が突き当たる位置決め部を有する、工作機械。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201880085686.5A CN111712351B (zh) | 2018-04-16 | 2018-12-27 | 机床 |
| EP18915724.1A EP3766632B1 (en) | 2018-04-16 | 2018-12-27 | Machine tool |
| US17/032,230 US11358225B2 (en) | 2018-04-16 | 2020-09-25 | Machine tool |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-078372 | 2018-04-16 | ||
| JP2018078372A JP7157306B2 (ja) | 2018-04-16 | 2018-04-16 | 工作機械 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/032,230 Continuation US11358225B2 (en) | 2018-04-16 | 2020-09-25 | Machine tool |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019202779A1 true WO2019202779A1 (ja) | 2019-10-24 |
Family
ID=68240221
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/048027 WO2019202779A1 (ja) | 2018-04-16 | 2018-12-27 | 工作機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US11358225B2 (ja) |
| EP (1) | EP3766632B1 (ja) |
| JP (1) | JP7157306B2 (ja) |
| CN (1) | CN111712351B (ja) |
| TW (1) | TWI803620B (ja) |
| WO (1) | WO2019202779A1 (ja) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3244201B1 (en) | 2016-05-13 | 2021-10-27 | Honeywell International Inc. | Fet based humidity sensor with barrier layer protecting gate dielectric |
| JP6994099B1 (ja) * | 2020-10-28 | 2022-01-14 | 株式会社スギノマシン | 穴あけ機 |
| WO2023145075A1 (ja) * | 2022-01-31 | 2023-08-03 | ファナック株式会社 | 送り軸機構 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0253545A (ja) * | 1988-08-12 | 1990-02-22 | Mitsubishi Heavy Ind Ltd | 送りねじ装置 |
| JPH0569352A (ja) * | 1991-09-09 | 1993-03-23 | Smc Corp | アクチユエータおよびその構造体 |
| JPH08118199A (ja) * | 1994-10-24 | 1996-05-14 | Makino Milling Mach Co Ltd | 工作機械の送り装置 |
| JP2005066716A (ja) * | 2003-08-28 | 2005-03-17 | Toyo Seiki Kogyo Co Ltd | ネジ送り機構、このネジ送り機構を備える加工装置およびネジ送り機構の製造方法 |
| JP2006097869A (ja) | 2004-09-30 | 2006-04-13 | Nsk Ltd | 直動テーブル装置 |
| US20130239854A1 (en) * | 2012-03-19 | 2013-09-19 | Fu-Chun Huang | Screw and nut assembly with screw rod support means |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4118844A (en) | 1976-08-30 | 1978-10-10 | Kabushiki Kaisha Komatsu Seisakusho | Machine tool |
| US4561814A (en) * | 1981-07-09 | 1985-12-31 | Dahlgren Jr William V | Mechanical tool manipulating method and apparatus |
| CH658819A5 (de) * | 1982-07-31 | 1986-12-15 | Hauni Werke Koerber & Co Kg | Antriebsmittel fuer den vorschub eines werkzeugmaschinentisches. |
| DE3879603T2 (de) * | 1987-10-09 | 1993-07-01 | Olympus Optical Co | Koaxialer grob-/feinversteller zur bedienung eines mikroskoptisches. |
| JP3165115B2 (ja) * | 1991-08-01 | 2001-05-14 | エスエムシー株式会社 | アクチュエータ |
| JPH07106527B2 (ja) * | 1993-07-05 | 1995-11-15 | 功 庄田 | 複合加工機のテーブル移動装置 |
| CN1174303A (zh) * | 1996-08-19 | 1998-02-25 | Smc株式会社 | 电传动装置 |
| JP3927285B2 (ja) * | 1997-07-08 | 2007-06-06 | 日本トムソン株式会社 | スライド装置 |
| JP2001219325A (ja) * | 2000-02-08 | 2001-08-14 | Shinx Ltd | ガントリー型の工作機械 |
| JP4190738B2 (ja) * | 2001-02-07 | 2008-12-03 | 株式会社ジェイテクト | 工作機械における半浮上式スライド案内機構 |
| JP2006118574A (ja) | 2004-10-20 | 2006-05-11 | Nsk Ltd | ステージ駆動装置 |
| JP4604706B2 (ja) | 2004-12-21 | 2011-01-05 | 日本精工株式会社 | ステージ駆動装置 |
| US20090067941A1 (en) * | 2007-09-07 | 2009-03-12 | Feng-Tien Chen | CNC machine tool having a sliding member movable at a high speed |
| JP5397236B2 (ja) * | 2010-01-18 | 2014-01-22 | Smc株式会社 | 送りねじ機構 |
| TWI586463B (zh) * | 2015-01-06 | 2017-06-11 | Chen Peng-Ren | CNC double spindle drive |
| CN105058074A (zh) * | 2015-07-23 | 2015-11-18 | 洪子涵 | 螺杆传动支撑装置 |
| CN205904751U (zh) * | 2016-08-10 | 2017-01-25 | 锕玛科技股份有限公司 | 滚珠螺杆滑台 |
| US10293442B2 (en) * | 2017-07-07 | 2019-05-21 | Baizheng Innovation Technology Co., Ltd. | C-type CNC machine center |
-
2018
- 2018-04-16 JP JP2018078372A patent/JP7157306B2/ja active Active
- 2018-12-27 WO PCT/JP2018/048027 patent/WO2019202779A1/ja unknown
- 2018-12-27 EP EP18915724.1A patent/EP3766632B1/en active Active
- 2018-12-27 CN CN201880085686.5A patent/CN111712351B/zh active Active
-
2019
- 2019-04-16 TW TW108113195A patent/TWI803620B/zh active
-
2020
- 2020-09-25 US US17/032,230 patent/US11358225B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0253545A (ja) * | 1988-08-12 | 1990-02-22 | Mitsubishi Heavy Ind Ltd | 送りねじ装置 |
| JPH0569352A (ja) * | 1991-09-09 | 1993-03-23 | Smc Corp | アクチユエータおよびその構造体 |
| JPH08118199A (ja) * | 1994-10-24 | 1996-05-14 | Makino Milling Mach Co Ltd | 工作機械の送り装置 |
| JP2005066716A (ja) * | 2003-08-28 | 2005-03-17 | Toyo Seiki Kogyo Co Ltd | ネジ送り機構、このネジ送り機構を備える加工装置およびネジ送り機構の製造方法 |
| JP2006097869A (ja) | 2004-09-30 | 2006-04-13 | Nsk Ltd | 直動テーブル装置 |
| US20130239854A1 (en) * | 2012-03-19 | 2013-09-19 | Fu-Chun Huang | Screw and nut assembly with screw rod support means |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3766632A1 (en) | 2021-01-20 |
| US11358225B2 (en) | 2022-06-14 |
| TW201943983A (zh) | 2019-11-16 |
| CN111712351A (zh) | 2020-09-25 |
| JP2019181645A (ja) | 2019-10-24 |
| EP3766632A4 (en) | 2021-12-15 |
| US20210008631A1 (en) | 2021-01-14 |
| JP7157306B2 (ja) | 2022-10-20 |
| TWI803620B (zh) | 2023-06-01 |
| EP3766632B1 (en) | 2024-04-10 |
| CN111712351B (zh) | 2023-05-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5094465B2 (ja) | 工作機械及び該工作機械を用いたワークの内表面加工方法 | |
| WO2019202779A1 (ja) | 工作機械 | |
| US9162289B2 (en) | Machine tool apparatus and method | |
| JP6917135B2 (ja) | 工作機械 | |
| JP5937486B2 (ja) | 工作機械 | |
| JP4280253B2 (ja) | ワーク回転装置 | |
| WO2019123699A1 (ja) | 工具保持装置及び工作機械 | |
| JP4259653B2 (ja) | 自動旋盤 | |
| JP5059530B2 (ja) | 複合旋盤及び複合旋盤におけるワークの加工方法 | |
| JP2008006570A (ja) | 砥石車の着脱構造 | |
| JP3979722B2 (ja) | 旋盤用補助ガイド装置及び補助ガイド装置を備えた自動旋盤 | |
| JP2002011616A (ja) | 歯切工具及び歯切加工方法 | |
| KR20220124534A (ko) | 내부를 절삭가공하기 위한 가공장치 | |
| JPH1015703A (ja) | 多機能旋盤 | |
| JP2001322001A (ja) | 複合加工旋盤 | |
| JP2007044792A (ja) | 長物加工用工作機械 | |
| JP6654403B2 (ja) | 加工装置 | |
| JP7324848B2 (ja) | 工作機械 | |
| JP2009066672A (ja) | 中空ワークの内面加工装置 | |
| JPH1076402A (ja) | 工作機械における工具装着方法 | |
| JP2008073786A (ja) | 切削加工治具及び切削加工方法 | |
| JPH05318206A (ja) | Nc旋盤及びその制御方法 | |
| JP2005169524A (ja) | 自動旋盤 | |
| JP4257511B2 (ja) | Nc加工装置 | |
| KR20220161178A (ko) | 공작 기계 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18915724 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018915724 Country of ref document: EP Effective date: 20201014 |