WO2016208687A1 - 磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車 - Google Patents
磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車 Download PDFInfo
- Publication number
- WO2016208687A1 WO2016208687A1 PCT/JP2016/068719 JP2016068719W WO2016208687A1 WO 2016208687 A1 WO2016208687 A1 WO 2016208687A1 JP 2016068719 W JP2016068719 W JP 2016068719W WO 2016208687 A1 WO2016208687 A1 WO 2016208687A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnetostrictive
- row
- outer peripheral
- peripheral surface
- base material
- Prior art date
Links
- 230000005291 magnetic effect Effects 0.000 title claims description 92
- 238000004519 manufacturing process Methods 0.000 title claims description 12
- 230000002093 peripheral effect Effects 0.000 claims abstract description 63
- 239000000758 substrate Substances 0.000 claims abstract description 36
- 239000000463 material Substances 0.000 claims description 91
- 239000003302 ferromagnetic material Substances 0.000 claims description 3
- 230000035945 sensitivity Effects 0.000 abstract description 41
- 230000035699 permeability Effects 0.000 description 25
- 230000008859 change Effects 0.000 description 17
- XEEYBQQBJWHFJM-UHFFFAOYSA-N iron Substances [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 16
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 14
- 238000000034 method Methods 0.000 description 12
- 238000001514 detection method Methods 0.000 description 10
- 238000007747 plating Methods 0.000 description 9
- 239000002184 metal Substances 0.000 description 8
- 229910052751 metal Inorganic materials 0.000 description 8
- 238000010586 diagram Methods 0.000 description 6
- 229910052759 nickel Inorganic materials 0.000 description 6
- 150000002739 metals Chemical class 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 229910052742 iron Inorganic materials 0.000 description 4
- 239000000696 magnetic material Substances 0.000 description 4
- 229910001030 Iron–nickel alloy Inorganic materials 0.000 description 3
- 229910052804 chromium Inorganic materials 0.000 description 3
- 230000006835 compression Effects 0.000 description 3
- 238000007906 compression Methods 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 229910045601 alloy Inorganic materials 0.000 description 2
- 239000000956 alloy Substances 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- 229910052796 boron Inorganic materials 0.000 description 2
- 229910052799 carbon Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 238000005520 cutting process Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 239000007769 metal material Substances 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 229910052709 silver Inorganic materials 0.000 description 2
- 229910052717 sulfur Inorganic materials 0.000 description 2
- 229910052719 titanium Inorganic materials 0.000 description 2
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- 229910003271 Ni-Fe Inorganic materials 0.000 description 1
- 229910021586 Nickel(II) chloride Inorganic materials 0.000 description 1
- 230000001154 acute effect Effects 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 229910002056 binary alloy Inorganic materials 0.000 description 1
- 239000012620 biological material Substances 0.000 description 1
- KGBXLFKZBHKPEV-UHFFFAOYSA-N boric acid Chemical compound OB(O)O KGBXLFKZBHKPEV-UHFFFAOYSA-N 0.000 description 1
- 239000004327 boric acid Substances 0.000 description 1
- 229910052793 cadmium Inorganic materials 0.000 description 1
- 238000005229 chemical vapour deposition Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- BAUYGSIQEAFULO-UHFFFAOYSA-L iron(2+) sulfate (anhydrous) Chemical compound [Fe+2].[O-]S([O-])(=O)=O BAUYGSIQEAFULO-UHFFFAOYSA-L 0.000 description 1
- 229910000359 iron(II) sulfate Inorganic materials 0.000 description 1
- 230000000873 masking effect Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- QMMRZOWCJAIUJA-UHFFFAOYSA-L nickel dichloride Chemical compound Cl[Ni]Cl QMMRZOWCJAIUJA-UHFFFAOYSA-L 0.000 description 1
- LGQLOGILCSXPEA-UHFFFAOYSA-L nickel sulfate Chemical compound [Ni+2].[O-]S([O-])(=O)=O LGQLOGILCSXPEA-UHFFFAOYSA-L 0.000 description 1
- 229910000363 nickel(II) sulfate Inorganic materials 0.000 description 1
- 239000012299 nitrogen atmosphere Substances 0.000 description 1
- 238000007650 screen-printing Methods 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000010023 transfer printing Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/102—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving magnetostrictive means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/45—Control or actuating devices therefor
- B62M6/50—Control or actuating devices therefor characterised by detectors or sensors, or arrangement thereof
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/102—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving magnetostrictive means
- G01L3/103—Details about the magnetic material used
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/105—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving inductive means
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N35/00—Magnetostrictive devices
- H10N35/101—Magnetostrictive devices with mechanical input and electrical output, e.g. generators, sensors
Definitions
- the present invention relates to a magnetostrictive sensor, a magnetic structure, a manufacturing method thereof, a motor drive unit including a magnetostrictive sensor, and a bicycle with an electric assist.
- magnetostrictive sensors are used to detect torque and load.
- a magnetostrictive portion including a magnetostrictive material is formed on the outer peripheral surface of a member (base material) on which a torque or load acts.
- the coil is disposed so as to surround the base material on which the magnetostrictive portion is formed.
- the magnetostrictive sensor when a force acts on the base material on which the magnetostrictive portion is formed, the permeability of the magnetostrictive material of the magnetostrictive portion changes. Therefore, the impedance of the coil arranged so as to surround the magnetostrictive portion changes.
- the magnetostrictive sensor detects torque and load by detecting a change in impedance of the coil.
- Patent Document 1 discloses a torque sensor using a magnetostrictive material made of an Fe—Ni binary alloy.
- the sensitivity of the sensor is improved by determining the composition of Fe—Ni so that the relative permeability and the magnetostriction constant are suitable.
- Patent Document 2 discloses a method of forming a magnetostrictive portion on a base material.
- the base material is immersed in the plating solution in a state where a predetermined portion of the base material is masked by the masking member.
- a plating film (magnetostriction part) is formed in the part which is not masked among base materials by sending an electric current through a plating solution.
- the magnetostrictive portion disclosed in Patent Document 2 has a plurality of columnar portions (magnetostrictive row portions) formed in parallel.
- JP 2007-93244 A Japanese Patent No. 4936969
- the magnetostrictive sensor has a plurality of magnetostrictive array portions formed in parallel as in the configuration disclosed in the above-mentioned Patent Document 2, in order to improve the sensitivity of the magnetostrictive sensor, It is conceivable to increase the number of magnetostrictive rows.
- the magnetostrictive sensor provided with the magnetostrictive portion having a plurality of magnetostrictive array portions, a configuration capable of improving the sensitivity even when the magnetostrictive portion is limited in size is obtained.
- the present inventors have conceived the following configuration for the magnetostrictive sensor.
- a magnetostrictive sensor includes a cylindrical or columnar base material extending along an axis, and a magnetostrictive portion formed on the outer peripheral surface of the base material.
- the magnetostrictive portion has a plurality of magnetostrictive row portions extending in a row. At least a portion of the plurality of magnetostrictive row portions is the length of the longest portion in a direction parallel to the outer peripheral surface of the substrate when the magnetostrictive row portion including the portion is viewed in a cross section orthogonal to the extending direction.
- the magnetostrictive sensor According to the magnetostrictive sensor according to the embodiment of the present invention, it is possible to improve the sensitivity even when the magnetostrictive portion has a dimensional restriction.
- FIG. 1 It is a fragmentary sectional view showing a schematic structure of a torque sensor concerning one embodiment of the present invention. It is an external view which shows schematic structure of the magnetic structure contained in the torque sensor shown in FIG. It is a figure which shows an example of the pattern of the magnetostriction film in the magnetic structure shown in FIG. It is a figure which shows an example of the pattern of the magnetostriction film in the magnetic structure shown in FIG. It is a figure which shows an example of the pattern of the magnetostriction film in the magnetic structure shown in FIG. It is a figure which shows an example of the pattern of the magnetostriction film in the magnetic structure shown in FIG. It is a figure which shows an example of the pattern of the magnetostriction film in the magnetic structure shown in FIG. It is a figure which shows an example of the pattern of the magnetostriction film in the magnetic structure shown in FIG.
- FIG. 2 is a diagram showing a schematic configuration of a circuit that converts a change in impedance of a coil into a voltage in the torque sensor shown in FIG. 1. It is a figure which shows schematic structure of the bicycle with an electric assistance provided with the torque sensor shown in FIG.
- FIG. 1 It is a block diagram which shows schematic structure of the motor drive unit in the bicycle with an electric assist shown in FIG.
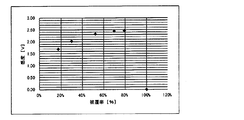
- the torque sensor which concerns on one Example of this invention, it is a graph which shows the relationship between the coverage (horizontal axis) of a magnetic structure, and the sensitivity (vertical axis) of this torque sensor.
- the torque sensor which concerns on one Example of this invention, it is a graph which shows the relationship between the length L / width W (horizontal axis) of the magnetostrictive film pattern of a magnetic structure, and the sensitivity (vertical axis) of a torque sensor.
- the height H 1 of the end portion of the magnetostrictive film in the magnetic structure / the maximum film thickness H (horizontal axis) of the magnetostrictive film and the sensitivity (vertical axis) of the torque sensor is a graph which shows a relationship.
- FIG. 1 is a partial sectional view showing a schematic configuration of a magnetostrictive sensor according to an embodiment of the present invention.
- a magnetostrictive torque sensor (hereinafter simply referred to as “torque sensor”) for detecting torque acting on a base 21 attached to a rotating shaft (not shown) may be used. .) 1 will be described.
- torque sensor for detecting torque acting on a base 21 attached to a rotating shaft (not shown)
- the torque sensor 1 includes a magnetic structure 20 having a magnetostrictive film 2 (magnetostrictive portion) and a detection unit 30 having coils 3 and 4.
- the magnetic structure 20 is formed in a cylindrical shape extending along the axis A.
- the magnetic structure 20 is disposed on the outer peripheral surface of a rotating shaft (not shown).
- FIG. 2 is a diagram showing a schematic configuration of the magnetic structure 20.
- the magnetic structure 20 includes a cylindrical base material 21 that extends along the axis A (that is, extends in the axial direction), and the magnetostrictive film 2. A detailed configuration of the magnetic structure 20 will be described later.
- the magnetostrictive film 2 is provided on the outer peripheral surface 21 s of the cylindrical base material 21.
- the magnetostrictive film 2 has a plurality of magnetostrictive array portions 2a, which will be described in detail later.
- FIG. 3 is a view of the magnetostrictive film 2 formed on the magnetic structure 20 when viewed from a direction orthogonal to the axis A (see FIG. 1).
- the pattern of the magnetostrictive film 2 shown in FIG. 3 is an example.
- the plurality of magnetostrictive array portions 2 a extend in a direction intersecting the axis A when viewed from the direction orthogonal to the axis A.
- the interval between adjacent magnetostrictive array portions 2 a is expressed as an interval (interspace) I.
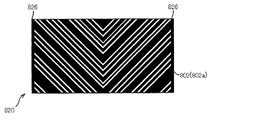
- the magnetostrictive film 2 has two regions 2 b and 2 c arranged in the axial direction of the base material 21. A plurality of magnetostrictive array portions 2a are formed across the two regions 2b and 2c. The magnetostrictive row portion 2a in one region and the magnetostrictive row portion 2a in the other region are provided symmetrically across the center line of the magnetostrictive film 2 in the axial direction. That is, the magnetostrictive array portion 2a of the magnetostrictive film 2 is formed in a V shape when viewed from the direction orthogonal to the axis A (in the state shown in FIG. 3).
- the magnetostrictive string portion 2a in the region 2b of the magnetostrictive film 2 has Either the tension direction or the compression direction force is input to the stretching direction.
- the other force of the tension direction or the compression direction is input to the magnetostriction array portion 2a of the region 2c in the magnetostrictive film 2 in the extending direction.
- the magnetic permeability changes in the magnetostrictive array portion 2a of the regions 2b and 2c of the magnetostrictive film 2.
- the detection unit 30 has two cylindrical coils 3 and 4 and a yoke 5. As shown in FIG. 1, the coils 3 and 4 are disposed so as to surround the magnetic structure 20. In the example of FIG. 1, the coils 3 and 4 are arranged side by side in the axial direction with respect to the magnetic structure 20. Specifically, as shown in FIG. 1, the coil 3 surrounds one region 2 b of the magnetostrictive film 2, and the coil 4 surrounds the other region 2 c of the magnetostrictive film 2. It is arranged against.
- the yoke 5 has a recess for arranging the coils 3 and 4. The coils 3 and 4 are disposed inside the cylindrical yoke 5.
- the coils 3 and 4 generate an alternating magnetic field around the coils 3 and 4 by being connected to the alternating current power source 6 as shown in FIG.
- the coils 3 and 4, the yoke 5, and the base material 21 constitute a magnetic circuit.
- the coils 3 and 4 are also connected to the torque detection circuit 7 as shown in FIG.
- FIG. 20 is a diagram illustrating an example of a configuration of an electronic circuit included in the torque sensor 1.
- the circuit shown in FIG. 20 includes an AC power supply 6 and a torque detection circuit 7.
- the AC power source 6 applies an AC voltage to the coils 3 and 4.
- the torque detection circuit 7 detects the torque generated in the base material 21 by detecting the voltage generated in the coils 3 and 4.
- the torque detection circuit 7 calculates a voltage difference Vout generated in each of the coils 3 and 4 and then calculates a torque generated in the base material 21 based on the difference Vout by an arithmetic circuit (not shown).
- the electronic circuit included in the torque sensor 1 is not limited to the configuration shown in FIG.
- the magnetostrictive array 2a in the regions 2b and 2c of the magnetostrictive film 2 in the torque sensor 1 has a tensile direction or a compression in the extending direction. Direction force is input. Therefore, in the regions 2b and 2c of the magnetostrictive film 2, the change in magnetic permeability generated in the magnetostrictive array portion 2a is different. Such a difference in permeability change is detected as a difference in voltage generated in the coils 3 and 4 in the torque detection circuit 7. Therefore, the torque detection circuit 7 can detect the torsional torque input to the base material 21.
- positioning of each structural member in the torque sensor 1 shown in FIG. 1 is an example.
- the number, arrangement, and the like of the coils 3 and 4 and the yoke 5 are not limited to the configuration shown in FIG. 1 and can be appropriately changed by those skilled in the art.
- the length L / width W of the magnetostrictive array part 2a of the magnetostrictive film 2 shown in FIG. 3 satisfies the following formula (2).
- the magnetostrictive array portion 2a extends in a first direction intersecting the axis A when viewed from the direction orthogonal to the axis A.
- the magnetostrictive array portion 2a extends in a second direction that intersects the first direction when viewed from the direction orthogonal to the axis A.
- the magnetostrictive string portion 2 a has a bent portion Z that is bent at an angle ⁇ in the central portion of the magnetostrictive film 2 in the axial direction of the base material 21.
- the coverage defined by the following formula (1) is 30% or more and 95% or less.
- the magnetostrictive string portion 2 a intersects the axis A from the end X in the axial direction of the magnetostrictive film 2 in the region 2 b of the magnetostrictive film 2 when viewed from the direction orthogonal to the axis A.
- the magnetostrictive film 2 extends toward the central portion in the axial direction (bending portion Z of the magnetostrictive string portion 2a).
- the extending direction of the magnetostrictive string portion 2a in the region 2b of the magnetostrictive film 2 corresponds to the first direction described above.
- the magnetostrictive array portion 2a is viewed in a direction perpendicular to the axis A in a direction that forms an angle ⁇ with the first direction in the region 2c of the magnetostrictive film 2, that is, the center of the magnetostrictive film 2 in the axial direction. From the portion (the curved portion Z of the magnetostrictive array portion 2a) intersects the axis A and extends toward the other end Y in the axial direction of the magnetostrictive film 2. The extending direction of the magnetostrictive string portion 2a in the region 2c of the magnetostrictive film 2 corresponds to the second direction described above.
- FIG. 3 shows an example of the magnetostrictive film 2 in which the magnetostrictive array portion 2a has the curved portion Z.
- the curved portion Z is an intersection of the first portion 2m (the magnetostrictive row portion 2a in the region 2b) and the second portion 2n (the magnetostrictive row portion 2a in the region 2c) of the magnetostrictive row portion 2a. That is, in the magnetostrictive film 2 shown in FIG. 3, one magnetostrictive array portion 2 a includes a first portion 2 m extending from one end X in the axial direction of the magnetostrictive film 2 to the curved portion Z, and a curved portion Z.
- the magnetostrictive film 2 has a second portion 2n extending to the other end Y in the axial direction.
- Coverage Area of the area in contact with the magnetostrictive film 2 on the outer peripheral surface 21s of the base material 21 / Total area (%) of the outer peripheral surface 21s of the base material 21 (1) 30 ⁇ length L / width W ⁇ 120 (2)
- the length L / width W of the magnetostrictive string portion 2a is equal to the length / width of the magnetostrictive string portion 2a in the first portion 2m and the magnetostrictive string portion 2a in the second portion 2n. It is the sum of length / width.
- the length / width of the magnetostriction array portion 2a in the first portion 2m is (distance L 1 from the end X of the magnetostriction array portion 2a shown in FIG. 3 to the curved portion Z) / (magnetostriction array in the first portion 2m). Width of part 2a).
- the length / width of the magnetostriction array portion 2a in the second portion 2n is (distance L 2 from the curved portion Z to the end Y of the magnetostriction array portion 2a shown in FIG. 3) / (magnetostriction array in the second portion 2n. Width of part 2a).
- the torque sensor 1 having good sensitivity can be realized. That is, in the above formula (1), when the coverage is 30% or more, sufficient sensitivity can be obtained in the torque sensor 1.
- the coverage is 95% or less, the shape of the magnetostrictive film 2 is less likely to vary. Therefore, when the coverage is 95% or less, there is no portion in contact between the adjacent magnetostrictive array portions 2a, and thus the torque sensor 1 can obtain sufficient sensitivity.
- the coverage is preferably 50% or more.
- the coverage is more preferably 60% or more.
- the coverage is preferably 93% or less.
- the coverage is more preferably 90% or less.
- the coverage is more preferably 85% or less.
- the torque sensor 1 having good sensitivity can be obtained.
- the torque sensor 1 when the length L / width W is 30 or more, the torque sensor 1 has sufficient sensitivity.
- the magnetostrictive film 2 can be easily manufactured.
- the length L / width W is preferably less than 95.
- the length L / width W is more preferably less than 85.
- the length L / width W is preferably 43 or more.
- the length L / width W is more preferably 53 or more.
- the length L / width W is more preferably 75 or more.
- an angle formed between the first direction and the second direction in the curved portion Z of the magnetostrictive string portion 2a is preferably 60 ° or more and 120 ° or less.
- the angle is more preferably 80 ° or more.
- the angle is preferably 100 ° or less.
- the magnetostriction array portion 2a does not have a curved portion (for example, the magnetostriction array portion 902a of the magnetostrictive film 902 shown in FIG. 12)
- the angle formed between the first portion 2m and the second portion 2n is the same as described above. Within the range, the sensitivity of the torque sensor 1 can be further increased.
- the magnetostriction array portion 2 a has the axis A and the first axis as seen from the direction orthogonal to the axis A of the substrate 21 as shown in FIG. 3.
- the absolute value of the angle ⁇ 1 formed with the direction is preferably 30 ° or more and 60 ° or less (more preferably, the angle ⁇ 1 is ⁇ 45 °).
- the absolute value of the angle ⁇ 2 formed by the base material 21 and the second direction is preferably 30 ° or more and 60 ° or less (more preferably, the angle ⁇ 2 is ⁇ 45 °).
- the magnetostrictive film 2 shown in FIG. 3 further includes a connecting portion 26 that connects the end portions of the adjacent magnetostrictive array portions 2a in the axial direction.
- the connecting portions 26 are respectively provided at both end portions in the axial direction of the magnetostrictive array portion 2a.
- FIGS. 4 to 12 are diagrams showing other examples of the magnetostrictive string portion 2a in the magnetostrictive film 2 of the magnetic structure 20 shown in FIG.
- the magnetostrictive film 102 shown in FIG. 4 differs from the magnetostrictive film 2 shown in FIG. 3 in the angle ⁇ between the first portion 102m and the second portion 102n in the magnetostrictive array portion 102a. More specifically, in the magnetostrictive film 102 shown in FIG. 4, the angle ⁇ is more than 90 ° (and less than 180 °).
- reference numeral 120 denotes a magnetic structure.
- Reference numeral 126 denotes a connecting portion.
- the magnetostrictive film 202 shown in FIG. 5 has a connecting portion 226 that connects the ends of adjacent magnetostrictive row portions 202a in both the axial directions of the magnetostrictive row portion 202a. It is provided at each end.
- the magnetostrictive film 202 is provided with a connecting portion 226 that connects the curved portions Z of adjacent magnetostrictive string portions 202a.
- the strength of the magnetostrictive film 202 including the plurality of magnetostrictive array portions 202a is further increased by providing the connecting portion 226 that connects the curved portions Z of the adjacent magnetostrictive array portions 202a. It has been.
- reference numeral 220 denotes a magnetic structure.
- Reference numeral 202m is a first portion of the magnetostrictive string 202a.
- Reference numeral 202n denotes a second portion of the magnetostrictive string portion 202a.
- the connecting portion 326 that connects the end portions in the axial direction of the adjacent magnetostrictive row portions 2a is a magnetostrictive row portion. Both end portions in the axial direction in 302a and the curved portions Z are connected to each other.
- adjacent magnetostrictive array portions 302a are connected to each other by a connecting portion 326 that connects the central portions in the axial direction in the first portion 302m and the central portions in the axial direction in the second portion 302n. Is further provided.
- the connecting portion 326 that connects the first portions 302m or the second portions 302n in the adjacent magnetostrictive array portions 302a is provided, the strength of the magnetostrictive film 302 is further increased. Has been enhanced.
- reference numeral 320 denotes a magnetic structure.
- the connecting portions 426 that connect the adjacent magnetostrictive string portions 402 a are a plurality of magnetostrictive string portions 402 a. Only a part of them may be connected.
- reference numeral 420 denotes a magnetic structure.
- Reference numeral 402 denotes a magnetostrictive film.
- Reference numeral 402a is a magnetostrictive string portion.
- Reference numeral 402m is a first portion of the magnetostrictive string portion 402a.
- Reference numeral 402n denotes a second portion of the magnetostrictive string portion 402a.
- the magnetostrictive film 502 may not be provided with a connecting portion.
- the magnetostrictive film 602 may have a plurality of magnetostrictive array portions 602a provided only on a part of the outer peripheral surface of the substrate.
- the interval between adjacent magnetostrictive array portions 702a in the magnetostrictive film 702 may not be uniform.
- the width W of the plurality of magnetostrictive array portions 802a in the magnetostrictive film 802 may not be uniform.
- reference numeral 520 denotes a magnetic structure.
- Reference numeral 502a denotes a magnetostrictive string portion.
- Reference numeral 502m is a first portion of the magnetostrictive string portion 502a.
- Reference numeral 502n denotes a second portion in the magnetostrictive string portion 502a.
- reference numeral 626 denotes a connecting portion.
- reference numeral 720 denotes a magnetic structure.
- Reference numeral 726 denotes a connecting portion.
- reference numeral 826 denotes a connecting portion.
- a magnetostrictive film 902 shown in FIG. 12 is one of modifications of the magnetostrictive film 2 shown in FIG.
- the first portion 902m and the second portion 902n are separated by providing a gap 27 instead of the curved portion Z of the magnetostrictive array portion 2a shown in FIG.
- the demagnetizing factor is increased as compared with the configuration shown in FIGS.
- the sensitivity of the torque sensor is slightly lower than that of the magnetostrictive film shown in FIG.
- the length L / width W of the formula (2) is (in the axial direction, the other end portion X from one end X 1 in the first portion 902m distance to 2) / (width of the magnetostrictive column portion 902a in the first portion 902m), or, (in the axial direction, from one end Y 1 of the second portion 902n to the other end Y 2 Distance) / (width of the magnetostrictive string portion 902a in the second portion 2n).
- reference numeral 920 denotes a magnetic structure.
- Reference numeral 926 denotes a connecting portion.
- the magnetostrictive film 1002 shown in FIG. 13 is different from the magnetostrictive film 2 shown in FIG. 3 in the position of the curved portion Z in the axial direction. More specifically, in the magnetostrictive film 2 shown in FIG. 3, the length L 1 of the first portion 2m constituting the magnetostrictive column portion 2a and the length L 2 of the second portion 2n equal. In the magnetostrictive film 2 shown in FIG. 3, the magnetostrictive array portion 2 a has a line-symmetric shape across the center line of the magnetostrictive film 2 in the axial direction. On the other hand, in the magnetostrictive film 1002 shown in FIG. 13, the length of the first portion 1002m and the length of the second portion 1002n are different (in FIG. 13, the length of the first portion 1002m is the second portion 1002n. Is longer than the length of). The ratio of the length of the first portion 1002m and the second portion 1002n is preferably 0.5 or more and 2 or less.
- reference numeral 1020 denotes a magnetic structure.
- Reference numeral 1026 denotes a connecting portion.
- FIG. 14 schematically shows a section of the magnetic structure 20 shown in FIG.
- the cross section shown in FIG. 14 is a cross section obtained by cutting the magnetic structure 20 along a plane orthogonal to the stretching direction in the magnetostrictive array portion 2a. More specifically, the cross section shown in FIG. 14 is obtained when the magnetostrictive array portion 2a is cut along a plane perpendicular to the first direction (the direction from the end portion X of the magnetostrictive film 2 to the curved portion Z in FIG. 2).
- FIG. 4 is a cross section (a cross section cut along a line CC in FIG. 3 in a direction perpendicular to the paper surface).
- the magnetic structure 20 includes a cylindrical base material 21 and a magnetostrictive film 2 provided on the outer peripheral surface 21 s of the base material 21. Note that “M” in FIG. 14 corresponds to “W” in FIG. 3.
- the magnetostrictive film 2 is made of a material containing a magnetic material.
- the magnetic material is preferably a ferromagnetic material.
- the magnetic biomaterial preferably includes at least one metal selected from, for example, Ni, Fe, Co, and Cr. From the viewpoint of obtaining a high magnetic permeability and a high magnetostrictive effect, the magnetic material preferably includes Fe and at least one selected from Ni, Co, and Cr.
- the magnetostrictive film 2 may further include a metal such as Al, Ti, Ge, Mo, Ag, or Cu, or a non-metallic material such as Si, B, S, C, O, or N.
- the content of Fe in the magnetostrictive film 2 is preferably 20% by mass or more and 40% by mass or less from the viewpoint of obtaining higher magnetic permeability and higher magnetostrictive effect.
- the Fe content is more preferably 23% by mass or more.
- the content of Fe is more preferably 26% by mass or more.
- the Fe content is more preferably 36% by mass or less.
- the Fe content is more preferably 33% by mass or less.
- the total content of metals other than Fe (at least one selected from Ni, Co and Cr) is preferably 60% by mass or more and 80% by mass or less.
- the total content of metals other than Fe is more preferably 64% by mass or more.
- the total content of metals other than Fe is more preferably 67% by mass or more.
- the total content of metals other than Fe is more preferably 77% by mass or less.
- the total content of metals other than Fe is more preferably 74% by mass or less.
- the magnetostrictive film 2 contains Fe and Ni
- content of Ni is 60 to 80 mass%.
- the Ni content is more preferably 64% by mass or more.
- the Ni content is more preferably 67% by mass or more.
- the Ni content is more preferably 77% by mass or less.
- the Ni content is more preferably 74% by mass or less.
- the content of S in the magnetostrictive film 2 is preferably 0.03% by mass or more and 0.12% by mass or less.
- the content of S is more preferably 0.04% by mass or more and 0.10% by mass or less.
- the content of S is more preferably 0.05% by mass or more and 0.09% by mass or less.
- the maximum film thickness H of the magnetostrictive film 2 (from the surface where the magnetostrictive film 2 is in contact with the base material 21 (the outer peripheral surface 21s of the base material 21) to the position where the magnetostrictive film 2 protrudes most outward in the radial direction of the base material 21. ) Is 20 ⁇ m or more and 200 ⁇ m or less.
- the maximum film thickness H is preferably 40 ⁇ m or more.
- the maximum film thickness H is more preferably 60 ⁇ m or more.
- the maximum film thickness H is preferably 140 ⁇ m or less.
- the maximum film thickness H is more preferably 100 ⁇ m or less.
- the magnetostrictive array portion 2a of the magnetostrictive film 2 is viewed in a cross-section orthogonal to the extending direction thereof, in a direction orthogonal to the radial direction of the base material 21 (a direction parallel to the outer peripheral surface 21s of the base material 21). It has a part longer than the length of the part by the side of the base material 21 in the magnetostriction row
- the magnetostrictive array portion 2 a has projecting portions 2 e that project from the main body portion formed on the base material 21 to one and the other in the direction orthogonal to the radial direction of the base material 21. Since the magnetostrictive string portion 2a has the protrusion 2e, the surface area of the magnetostrictive string portion 2a is increased.
- the angle ⁇ e formed by the contact surface between the magnetostrictive array portion 2a and the substrate 21 and the protruding direction of the protruding portion 2e is preferably an acute angle (less than 90 °).
- the angle ⁇ e is more preferably greater than 0 ° and not greater than 45 °.
- the angle ⁇ e is more preferably 30 ° or less.
- the magnetostrictive array portion 2a of the magnetostrictive film 2 has the protruding portion 2e as described above, in the cross section shown in FIG. 14, from the outer peripheral surface 21s of the base material 21, the radial direction of the base material 21 (of the magnetostrictive array portion 2a).
- the width M at a predetermined distance in the thickness direction) is longer than the width N of the contact portion 2f between the magnetostrictive film 2 and the outer peripheral surface 21s of the substrate 21.
- the plurality of magnetostrictive row portions 2a in the magnetostrictive film 2 are viewed in a direction perpendicular to the radial direction of the base material 21 when the magnetostrictive row portion 2a is viewed in a cross section perpendicular to the extending direction (the cross section shown in FIG. 14).
- the length of the longest portion (the length M at the position of the predetermined distance, hereinafter referred to as the maximum width dimension M) is larger than the length N of the contact portion 2f between the magnetostrictive film 2 and the outer peripheral surface 21s of the substrate 21.
- the maximum width dimension M is larger than the interval D between adjacent magnetostrictive array portions 2a.
- the interval D between the adjacent magnetostrictive row portions 2a means the interval between the contact portion 2f between the magnetostrictive row portion 2a and the base material 21 and the contact portion 2f between the adjacent magnetostrictive row portion 2a and the base material 21.
- the sensitivity of the torque sensor 1 can be increased by forming the magnetostrictive array portion 2a having the shape as described above. That is, in the magnetostrictive film 2, the maximum width dimension M of the magnetostrictive string portions 2a is larger than the interval D between adjacent magnetostrictive string portions 2a when the magnetostrictive string portions 2a are viewed in a cross section orthogonal to the extending direction. In such a configuration, the interval D between the magnetostrictive array portions 2a is relatively narrow.
- the maximum width dimension M in the magnetostrictive row portion 2a is larger than the length N of the contact portion 2f between the magnetostrictive film 2 and the outer peripheral surface 21s of the substrate 21.
- the above-described configuration increases the sensitivity of the torque sensor 1 without changing the coverage defined by the above formula (1) and the length L / width W defined by the above formula (2). be able to.
- the magnetostrictive row portion 2a has a distance D between the contact portion 2f with the outer peripheral surface 21s of the base material 21 and the contact portion 2f with the outer peripheral surface 21s of the base material 21 in the adjacent magnetostrictive row portion 2a. Is longer than the sum of the length projecting toward the adjacent magnetostrictive row portion 2a and the length projecting portion 2e of the adjacent magnetostrictive row portion 2a toward the magnetostrictive row portion 2a.
- the magnetostrictive row portion 2a has a maximum width dimension M larger than the height (maximum film thickness) H in the thickness direction of the magnetostrictive row portion 2a as seen in the cross section shown in FIG.
- column part 2a is formed in flat shape longer in the direction (direction parallel to the outer peripheral surface 21s of the base material 21) orthogonal to the radial direction of the base material 21 than the thickness direction. Therefore, the surface area of the magnetostrictive string portion 2a can be further increased. Therefore, it is possible to more easily detect a change in magnetic permeability when a force is applied to the magnetostrictive film 2.
- the maximum film thickness H of the magnetostrictive column portion 2a, the height at the end m e of the magnetostrictive column portion 2a (magnetostrictive column portion 2a and the substrate 21 The ratio H 1 / H to the distance from the contact surface to the tip of the protrusion 2 e, that is, the height from the outer peripheral surface 21 s of the substrate 21 to the position of the maximum width dimension M) H 1 is less than 1. . H 1 / H is preferably 0.8 or less. H 1 / H is more preferably 0.5 or less. H 1 / H is more preferably 0.3 or less. Meanwhile, H 1 / H is preferably 0.015 or more.
- the magnetostrictive string portion 2a By forming the magnetostrictive string portion 2a so that H 1 / H is in the above range, the surface area of the magnetostrictive string portion 2a can be further increased. Therefore, it is possible to more easily detect a change in magnetic permeability when a force is applied to the magnetostrictive film 2.
- H 1 / H below 0.5, that is, half the height of the maximum film thickness H of the magnetostrictive column portion 2a, from the outer peripheral surface 21s of the substrate 21 to the position of the maximum width M
- 17, 18, and 19 are each obtained by cutting another example of the magnetic structure in a cross section similar to that in FIG. 2 (cut along a plane orthogonal to the extending direction of the magnetostrictive string portion 2 a). Cross section). 17, 18, and 19, the angle ⁇ e formed between the outer peripheral surface 21 s of the base material 21 and the protruding directions of the protruding portions 2002 e, 3002 e , and 4002 e in the magnetostrictive array portions 2002 a, 3002 a, and 4002 a and the ratio H 1 / H is, if each different from the example shown in FIG. 14 (theta e is 20 °, respectively, 5 °, 3 °, the ratio H 1 / H is 0.5,0.2,0.1) shows the .
- the surface area of the magnetostrictive string portion 5002a is as shown in FIGS. Or smaller than the magnetostrictive rows 2002a, 3002a, 4002a having 19 cross sections. Therefore, the sensitivity of the torque sensor is inferior to that of the magnetostrictive string portions 2002a, 3002a, and 4002a having the cross sections of FIGS.
- the base material 21 is made of a material having a component different from that of the magnetostrictive film 2, for example, a material having a lower magnetic permeability than the magnetostrictive film 2.
- the substrate 21 is preferably made of a magnetic material, and more preferably made of a ferromagnetic material such as Fe, Ni, Co, or Cr.
- the base material 21 may contain a metal such as Al, Ti, Ge, Mo, Ag, or Cu, or a non-metallic material such as Si, B, S, C, O, or N.
- the magnetic structure 20 may further include a resist layer provided on the surface of the magnetostrictive film 2.
- the thickness of the resist layer is preferably 45 ⁇ m or less.
- FIGS. 16A and 16B are views for explaining a method for manufacturing the magnetic structure 20.
- FIG. 16 is a cross-sectional view showing the substrate 21, the magnetostrictive film 2, the resist layer 91, and the like cut along the same plane as FIG. 14 in the manufacturing process of the magnetic structure 20.
- the magnetic structure 20 forms a resist layer 91 having a predetermined pattern on the outer peripheral surface 21 s of the base material 21, and forms the magnetostrictive film 2 on the outer peripheral surface 21 s of the base material 21 provided with the resist layer 91. And a process.
- a method for manufacturing the magnetic structure 20 will be specifically described.
- a resist layer 91 having a predetermined pattern is formed on the outer peripheral surface 21 s of the base material 21.
- the resist layer 91 is used to form the magnetostrictive array portion 2a shown in FIGS. 1, 2, and 3 to 12.
- the resist layer 91 can be formed by a known method such as water transfer or screen printing.
- the film thickness of the resist layer 91 is, for example, 3 ⁇ m or more and 45 ⁇ m or less.
- the angle ⁇ f formed by the outer peripheral surface 21s of the base material 21 and the end portion of the resist layer 91 is an obtuse angle (greater than 90 °) so that the protruding portion 2e is formed in the magnetostrictive array portion 2a. .
- the magnetostrictive film 2 is formed on the surface of the substrate 21 on which the resist layer 91 is provided. At that time, the height H of the magnetostrictive film 2, to form a magnetostrictive layer 2 to be higher than the height H 1 of the resist layer 91.
- the magnetostrictive film 2 can be formed by a known method such as a sputtering method, a CVD method, or a plating method. Next, it is preferable to perform heat treatment at a predetermined temperature (for example, 300 ° C. to 1,000 ° C.) for a predetermined time (for example, 1 minute to 48 hours). Thus, the magnetic structure 20 having the magnetostrictive film 2 shown in FIG. 14 is obtained.
- the magnetostrictive film 2 is formed and heat-treated, whereby the magnetic structure 20 with good sensitivity can be obtained by a simple method. And can be obtained in a short process. Thereby, the manufacturing cost of the magnetic structure 20 can be reduced.
- a bicycle with electric assist for example, a two-wheeled vehicle, a three-wheeled vehicle, or a four-wheeled vehicle
- the torque sensor 1 detects torque generated when the passenger steps on the pedal.
- the driving of the electric motor is controlled based on the torque value detected by the torque sensor 1.
- FIG. 21 is a diagram showing a schematic configuration of the electrically assisted bicycle 10 which is an example of the electrically assisted vehicle of the present invention.
- left and right, front and rear, and top and bottom mean left and right, front and back, and top and bottom, respectively, based on the state in which the passenger 71 is seated on the saddle 34 of the electric assist-assisted bicycle 10 toward the handle 77.
- the electric assist-assisted bicycle 10 includes a frame 12.
- the frame 12 includes a head pipe 14, an upper pipe 16, a front pipe 18, a seat pipe 70, a pair of rear pipes 72, and a pair of lower pipes 74.
- the upper pipe 16 extends rearward and horizontally from the head pipe 14.
- the front pipe 18 extends rearward and obliquely downward from the head pipe 14.
- the seat pipe 70 connects the rear end portion of the upper pipe 16 and the rear end portion of the front pipe 18.
- the pair of rear pipes 72 extend obliquely rearward and downward from the connection portion between the upper pipe 16 and the seat pipe 70.
- the pair of lower pipes 74 extends in the horizontal direction rearward from the connection portion between the front pipe 18 and the seat pipe 70.
- the rear end portions of the pair of rear pipes 72 and the rear end portions of the pair of lower pipes 74 are connected to each other.
- a steering shaft 76 for changing the traveling direction of the vehicle is provided along the head pipe 14.
- the steering shaft 76 is rotatable within the head pipe 14.
- a handle 77 is attached to the upper end of the steering shaft 76.
- a pair of left and right front forks 80 are attached to the lower end of the steering shaft 76.
- a front wheel 82 is attached to the lower end of the front fork 80.
- the front wheel 82 is rotatable about the central axis of the front wheel 82 supported by the front fork 80.
- a saddle 34 is provided at the upper end of the seat pipe 70.
- a cargo bed 36 is fixed to the seat pipe 70 so as to extend rearward.
- a motor drive unit 38 is disposed at the connection between the front pipe 18 and the seat pipe 70.
- FIG. 22 shows a schematic configuration of the motor drive unit 38 of the bicycle 10 with electric assist.
- the motor drive unit 38 includes the torque sensor 1 according to the above embodiment. More specifically, as shown in FIG. 22, the motor drive unit 38 includes a crankshaft 40, a drive sprocket 42, a crank angle sensor 44 and a torque sensor 1, an electric motor 48, and a controller 50.
- the motor drive unit 38 may be configured to be attachable to a bicycle that is not an electrically assisted bicycle, or may be configured to be replaceable with an existing motor-assisted bicycle motor drive unit.
- a pedal 54 is attached to the crankshaft 40 via a crank 52.
- a drive sprocket 42 (see FIG. 22) is attached to the outer peripheral surface of the crankshaft 40.
- the drive sprocket 42 is connected to a rear wheel sprocket 58 via an endless chain 56.
- a rear wheel 62 is attached to the rear wheel sprocket 58 via a rotating shaft 60. The rear wheel 62 can rotate around the rotation shaft 60.
- crank angle sensor 44 and the torque sensor 1 are disposed in the vicinity of the crankshaft 40.
- Crank angle sensor 44 detects the crank angle theta c is the rotation angle of the crankshaft 40 which is rotated by the operation of the pedal 54.
- the torque sensor 1 detects a crank torque ⁇ that is a torque applied to the crankshaft 40.
- the electric motor 48 generates auxiliary driving force applied to the driving sprocket 42.
- the controller 50 includes a CPU 64 and a memory 66.
- the CPU 64 performs necessary calculations and controls the operation of the electric motor 48 and the electric assist-assisted bicycle 10.
- the memory 66 that is a storage means is composed of, for example, an EEPROM, and stores programs, data, calculation data, and the like for controlling the operation of the bicycle 10 with electric assistance.
- the memory 66 stores assist patterns.
- CPU64 on the basis of the crank angle theta c and crank torque tau, controls the auxiliary driving force generated by the electric motor 48.
- the bicycle 10 with an electric assist includes the torque sensor 1 according to the above-described embodiment that can detect torque with high sensitivity and high accuracy, and thus can stably travel.
- the torque sensor 1 includes a cylindrical base material 21 extending along the axis A and a magnetostrictive film 2 formed on the outer peripheral surface 21 s of the base material 21.
- the magnetostrictive film 2 has a plurality of magnetostrictive row portions 2a extending in a row. At least a portion of the plurality of magnetostrictive row portions 2a is the longest portion in the direction parallel to the outer peripheral surface 21s of the base material 21 when the magnetostrictive row portion 2a including the portion is viewed in a cross section orthogonal to the extending direction.
- the magnetostrictive row portion 2a has a length M that is the longest in the direction parallel to the outer peripheral surface 21s of the base member 21 when viewed in a cross section orthogonal to the extending direction. Is larger than the interval D. Therefore, the interval D between the magnetostrictive string portions 2a is relatively narrow. In such a configuration in which the interval D between the adjacent magnetostrictive row portions 2a is narrow, the length M of the longest portion is set to be longer than the length N of the contact portion 2f between the magnetostrictive row portion 2a and the outer peripheral surface 21s of the substrate 21. By increasing the size, the surface area of the magnetostrictive array portion 2a can be increased. Therefore, it is possible to easily detect a change in magnetic permeability when a force is applied to the magnetostrictive film 2. Thereby, the sensitivity of the torque sensor 1 can be improved while the magnetostrictive film 2 is limited in size.
- the at least a part of the plurality of magnetostrictive array portions 2a includes the magnetostrictive array portion 2a having a length M of the longest portion when the magnetostrictive array portion 2a including the part is viewed in a cross section orthogonal to the extending direction. It is larger than the maximum film thickness H.
- the base plate 21 being located more than the thickness direction of the magnetostrictive row portion 2a when the magnetostrictive row portion 2a including the part is viewed in a cross section perpendicular to the extending direction. It is formed in a flat shape that is long in a direction parallel to the outer peripheral surface 21s. Therefore, the surface area of the magnetostrictive string portion 2a can be further increased. Therefore, it is possible to more easily detect a change in magnetic permeability when a force is applied to the magnetostrictive film 2. Thereby, the sensitivity of the torque sensor 1 can be further improved while the magnetostrictive film 2 is limited in size.
- the at least part of the plurality of magnetostrictive array portions 2a is such that the maximum film thickness H of the magnetostrictive array portion 2a is equal to that of the substrate 21 when the magnetostrictive array portion 2a including the part is viewed in a cross section orthogonal to the extending direction. It is larger than the height H 1 in the thickness direction from the outer peripheral surface 21 s to the longest portion of the base material 21.
- the magnetostrictive array parts 2a is seen from the contact part 2f with the outer peripheral surface 21s of the base member 21 when the magnetostrictive array part 2a including the part is viewed in a cross section orthogonal to the extending direction. Also, a portion having a large width dimension can be formed. Therefore, the surface area of the magnetostrictive row portion can be increased as compared with the magnetostrictive row portion that does not have a portion having a width dimension larger than that of the contact portion 2f with the outer peripheral surface 21s of the base material 21. Therefore, it is possible to easily detect a change in magnetic permeability when a force is applied to the magnetostrictive film 2. Thereby, the sensitivity of the torque sensor 1 can be improved while the magnetostrictive film 2 is limited in size.
- the magnetostrictive array part 2a is most viewed in a direction parallel to the outer peripheral surface 21s of the base material 21 when the magnetostrictive array part 2a including the part is viewed in a cross section orthogonal to the extending direction.
- the long portion can be formed in a wider range in the thickness direction of the magnetostrictive string portion 2a. Therefore, the surface area of the magnetostrictive array portion can be further increased. Therefore, it is possible to more easily detect a change in magnetic permeability when a force is applied to the magnetostrictive film 2.
- the at least part of the plurality of magnetostrictive array parts 2a includes the contact part 2f, the adjacent magnetostrictive array part 2a and the base material when the magnetostrictive array part 2a including the part is viewed in a cross section orthogonal to the extending direction.
- the distance D between the contact portion 2 f and the outer surface 21 s of the base 21 is the longest portion facing the magnetostriction array portion 2 a adjacent to the contact portion 2 f.
- the longest portion of the adjacent magnetostriction array portion 2a protrudes toward the magnetostriction array portion 2a with respect to the contact portion 2f between the adjacent magnetostriction array portion 2a and the substrate 21. Greater than sum.
- the magnetostrictive film 2 has a connecting portion 26 that connects a plurality of magnetostrictive array portions 2a. This makes it difficult for the magnetostrictive array portion 2a to peel off from the substrate 21. Therefore, the strength of the magnetostrictive film 2 can be improved.
- the torque sensor 1 further includes coils 3 and 4 arranged so as to surround the magnetostrictive film 2. Thereby, the change in the magnetic permeability generated in the magnetostrictive film 2 can be detected by the change in the impedance of the coils 3 and 4.
- a plurality of coils 3 and 4 are arranged along the axis A.
- the change of the magnetic permeability in the magnetostrictive film 2 can be detected more reliably by the plurality of coils 3 and 4. Therefore, the detection accuracy of the torque sensor 1 can be improved.
- the configuration of this embodiment is applied to the torque sensor 1 as an example of a magnetostrictive sensor.
- the configuration of the present embodiment may be applied to other sensors such as a load sensor as long as the sensor has a magnetostrictive film.
- the configuration of the present embodiment may be applied not only to a torque sensor used for a bicycle with an electric assist but also to sensors for other uses.
- the base material 21 is cylindrical.
- the base material 21 may have any cross-sectional shape as long as it is cylindrical or columnar.
- the magnetostrictive row portion 2a of the magnetostrictive film 2 extends in a row.
- at least a part of the plurality of island-shaped magnetostrictive portions formed in an island shape may be connected and formed in a row shape.
- the plurality of magnetostrictive array portions 2a may not be parallel as long as they do not contact each other.
- the plurality of magnetostrictive array portions 2a in the magnetostrictive film 2 have the same cross section as the cross section shown in FIG.
- the cross section of the magnetostrictive row portion 2a may be different in a part of the extending direction of the magnetostrictive row portion 2a.
- the plurality of magnetostrictive array portions 2a may not all have the same cross-sectional shape.
- the magnetostrictive array portion 2a has the protruding portions 2e protruding in one and the other in the direction parallel to the outer peripheral surface 21s of the base material 21 when viewed in a cross section orthogonal to the extending direction.
- the magnetostrictive array portion 2a may have a protruding portion that protrudes in one or the other direction parallel to the outer peripheral surface 21s of the base material 21.
- the magnetostrictive row portion 2a has a longest length M in the direction parallel to the outer peripheral surface 21s of the base material 21 as viewed in a cross section perpendicular to the extending direction, and the maximum film of the magnetostrictive row portion 2a. Greater than thickness H. However, in the magnetostrictive array portion 2a, the length M of the longest portion may be equal to or less than the maximum film thickness H.
- the magnetostrictive array portion 2a has the longest half of the maximum film thickness H of the magnetostrictive array portion 2a from the outer peripheral surface 21s of the base material 21 to the base material 21 when viewed in a cross section orthogonal to the extending direction. wherein is the thickness direction of the height H 1 or more to the portion.
- magnetostrictive column section 2a half of the maximum thickness M may be smaller than the height H 1.
- Example 1 In the manufacturing method shown in FIG. 16, the magnetic structure 20 in which the magnetostrictive array portion 2a shown in FIG. 3 and the magnetostrictive film 2 having the cross section shown in FIG. 14 were formed by plating.
- Plating was performed with a known Ni—Fe alloy bath (watt bath) using nickel sulfate, nickel chloride, iron (II) sulfate, boric acid or the like.
- the plating conditions were pH 3, bath temperature 55 ° C., current density 5-20 A / dm 2 .
- the uniformity of the film thickness of the obtained plating film (magnetostrictive film 2) was ensured by performing the plating while rotating the base material 21 in the circumferential direction at 3 rotations / minute.
- the obtained magnetostrictive film 2 was heat-treated at 500 ° C. for 1 hour in a nitrogen atmosphere.
- the magnetic structure 20 obtained by the above-described method has a maximum film thickness H of 85 ⁇ m, a width M of 460 ⁇ m, and a length N of the contact surface with the substrate 21 of 260 ⁇ m in the cross section (FIG. 14) of the magnetostrictive array portion 2a.
- the coverage is 17%, 30%, 52%, 70%, 79% (FIG. 23), and the length L / width W of the magnetostrictive array portion 2a is 12, 25, 32, 36, 43, 54, 64, 75, 84, 95, 120 (FIG. 24).
- the angle ⁇ (see FIG. 3) formed by the first direction and the second direction was 90 °. As shown in FIG.
- the angle ⁇ 1 formed by the axis A of the base material 21 and the first direction was 45 °.
- the angle ⁇ 2 formed between the axis A of the base material 21 and the second direction was 45 °.
- the interval I between the adjacent magnetostrictive array portions 2a was 200 ⁇ m. Note that the thickness of the resist layer 91 used for manufacturing the magnetostrictive film 2 was 20 ⁇ m.
- the produced magnetostrictive film 2 was an Fe—Ni alloy.
- the Fe concentration in the magnetostrictive film 2 was 30% by mass, and the Ni concentration was 70% by mass.
- the material of the base material 21 was SCM435 (JIS G4053).
- a torque sensor 1 having the configuration of FIG. 1 was manufactured using the magnetic structure 20 obtained in this example.
- each of the resistors R1 and R2 is a resistor having a resistance value of 15 ⁇ .
- Coils C1 and C2 are each configured by winding a copper wire with an insulating film having a diameter of 0.2 mm 124 times.
- FIG. 23 is a graph showing the relationship between the coverage (horizontal axis) of the magnetic structure 20 and the sensitivity (vertical axis) of the torque sensor 1 in the torque sensor 1 according to this example. According to FIG. 23, it can be understood that the sensitivity is good when the coverage is 30% or more and 95% or less.
- FIG. 24 shows the relationship (coverage ratio) between the length L / width W (horizontal axis) of the magnetostrictive film pattern 2a of the magnetic structure 20 and the sensitivity (vertical axis) of the torque sensor 1 in the torque sensor 1 according to this example. : 70%). According to FIG. 24, it can be understood that when the length L / width W is less than 30, the sensitivity greatly decreases.
- FIG. 25 shows the height H 1 of the end of the magnetostrictive film 2 in the magnetic structure 20 / the maximum film thickness H (horizontal axis) of the magnetostrictive film 2 and the sensitivity of the torque sensor 1 in the torque sensor 1 according to the present embodiment. It is a graph which shows the relationship with (vertical axis).
- H 1 / H are 0.09 (angle ⁇ e : 2 °), 0.12 (angle ⁇ e : 3 °), 0.24 (angle ⁇ e : 5 °), and 0.53 (angle ⁇ e : 15 °))
- H 1 / H are 0.09 (angle ⁇ e : 2 °), 0.12 (angle ⁇ e : 3 °), 0.24 (angle ⁇ e : 5 °), and 0.53 (angle ⁇ e : 15 °)
- Example 2 The magnetostrictive film 2 has the cross section shown in FIG. 14 and the magnetostrictive string portion shown in FIGS. 5 to 11 and 13 in the same manner as in Example 1 except that the magnetostrictive film 2 has the patterns shown in FIGS. Each structure was obtained.
- the torque sensor provided with the magnetic structure according to the present example had the same sensitivity as the torque sensor 1 according to the first example.
- Example 3 A magnetostrictive array portion shown in FIG. 12 and a magnetic structure having a cross section shown in FIG. 14 were obtained in the same manner as in Example 1 except that the magnetostrictive film 2 was changed to the pattern shown in FIG.
- the torque sensor provided with the magnetic structure according to this example had good sensitivity although the sensitivity was slightly inferior to that of the torque sensor 1 according to example 1.
- Example 4 The magnetostrictive string 2a shown in FIG. 3 and FIG. 15 are the same as in Example 1 except that the thickness of the resist layer 91 for forming the magnetostrictive film 2 is 50 ⁇ m and the thickness of the magnetostrictive film 2 is 45 ⁇ m.
- the present invention can be used for a magnetostrictive sensor used in, for example, a bicycle with an electric assist.
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Measuring Magnetic Variables (AREA)
Abstract
複数の磁歪列部を有する磁歪部を備えた磁歪式センサにおいて、前記磁歪部に寸法上の制約がある中でも、感度向上を図ることが可能な構成を得る。 トルクセンサ1は、基材21の外周面21s上に形成された磁歪膜2を備える。磁歪膜2は、列状に延びる複数の磁歪列部2aを有する。複数の磁歪列部2aのうち少なくとも一部は、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、基材21の外周面21sに平行な方向において、最も長い部分の長さが、前記一部を含む磁歪列部2aと基材21の外周面21sとの接触部分2fの長さよりも大きく、且つ、前記接触部分2fと、前記磁歪列部2aの隣りの磁歪列部2aと基材21の外周面21sとの接触部分2fとの間隔Dよりも大きい。
Description
本発明は、磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車に関する。
一般に、トルクや荷重を検知するために、磁歪式センサが用いられている。多くの磁歪式センサでは、トルクまたは荷重が作用する部材(基材)の外周面に、磁歪材料を含む磁歪部が形成されている。このような構成を有する磁歪式センサでは、磁歪部が形成された基材を囲むように、コイルが配置されている。
上述の構成により、磁歪式センサにおいて、磁歪部が形成された基材に力が作用した場合に、磁歪部の磁歪材料の透磁率が変化する。よって、磁歪部を囲むように配置されたコイルのインピーダンスが変化する。磁歪式センサは、前記コイルのインピーダンスの変化を検出することにより、トルクや荷重を検知する。
特許文献1には、Fe-Niの2元型合金からなる磁歪材料を利用したトルクセンサが開示されている。この文献に開示されている構成では、比透磁率と磁歪定数とが好適になるようにFe-Niの組成を決定することにより、センサ感度の向上を図っている。
特許文献2には、基材上に磁歪部を形成する方法が開示されている。この方法では、マスキング部材によって基材の所定部分をマスキングした状態で、該基材をめっき液中に浸漬する。その後、めっき液中に電流を流すことによって、基材のうちマスキングされていない部分にめっき膜(磁歪部)が形成される。特許文献2に開示されている磁歪部は、平行に形成された複数の列状部分(磁歪列部)を有する。
上述の特許文献1に開示されている構成のように、トルクや荷重を精度良く検出するためには、磁歪式センサの感度向上が求められている。
ところで、上述の特許文献2に開示されている構成のように、磁歪式センサが、平行に形成された複数の磁歪列部を有する構成の場合、磁歪式センサの感度を向上するために、前記磁歪列部の数を増やすことが考えられる。
しかしながら、基材上の限られた範囲に形成された磁歪部において、前記磁歪列部の数を増やすことは、寸法上の制約により、限界がある。
以上より、本発明では、複数の磁歪列部を有する磁歪部を備えた磁歪式センサにおいて、前記磁歪部に寸法上の制約がある中でも、感度向上を図ることが可能な構成を得る。
磁歪式センサの感度を向上するためには、磁歪部で生じる透磁率の変化をコイルによって検出する際に、より検出しやすくする必要がある。そのためには、磁歪列部の数を増やすことにより、透磁率の変化を検出しやすくすることが考えられる。しかしながら、限られた範囲内に形成された磁歪部内に形成可能な磁歪列部の数には限界がある。
これに対し、発明者らによる鋭意検討の結果、磁歪部の表面積を大きくすることにより、磁歪列部の数を増やすことと同等の効果が得られることが分かった。すなわち、磁歪部の表面積を大きくすることにより、該磁歪部の透磁率を広範囲で変化させることができる。これにより、コイルによって、磁歪部の透磁率の変化を容易に検出することができる。
以上の知見に基づいて、磁歪式センサについて本発明者らは、以下のような構成に想到した。
本発明の一実施形態に係る磁歪式センサは、軸線に沿って延びる筒状または柱状の基材と、前記基材の外周面上に形成された磁歪部とを備える。前記磁歪部は、列状に延びる複数の磁歪列部を有する。前記複数の磁歪列部のうち少なくとも一部は、該一部を含む磁歪列部をその延伸方向と直交する断面で見て、前記基材の外周面に平行な方向において、最も長い部分の長さが、前記一部を含む磁歪列部と前記基材の外周面との接触部分の長さよりも大きく、且つ、前記接触部分と、前記磁歪列部の隣りの磁歪列部と前記基材の外周面との接触部分との間隔よりも大きい。
本発明の一実施形態に係る磁歪式センサによれば、磁歪部に寸法上の制約がある中でも、感度向上を図ることができる。
以下、図面を参照して本発明の実施形態を詳細に説明する。なお、以下の説明において、各図中の構成部材の寸法は、実際の構成部材の寸法及び各構成部材の寸法比率等を忠実に表したものではない。
1.磁歪式センサ
1.1.磁歪式センサの構成
図1は、本発明の一実施形態に係る磁歪式センサの概略構成を示す部分断面図である。以下の説明では、磁歪式センサの一例として、図示しない回転軸に取り付けられた基材21に作用するトルクを検知するための磁歪式トルクセンサ(以下、単に「トルクセンサ」と表記する場合もある。)1について説明する。なお、図1では、説明のために、トルクセンサ1の構成を模式的に示す。
1.1.磁歪式センサの構成
図1は、本発明の一実施形態に係る磁歪式センサの概略構成を示す部分断面図である。以下の説明では、磁歪式センサの一例として、図示しない回転軸に取り付けられた基材21に作用するトルクを検知するための磁歪式トルクセンサ(以下、単に「トルクセンサ」と表記する場合もある。)1について説明する。なお、図1では、説明のために、トルクセンサ1の構成を模式的に示す。
図1に示すように、トルクセンサ1は、磁歪膜2(磁歪部)を有する磁性構造体20と、コイル3,4を有する検出ユニット30とを備える。磁性構造体20は、軸線Aに沿って延びる円筒状に形成されている。磁性構造体20は、図示しない回転軸の外周面上に配置されている。
図2は、磁性構造体20の概略構成を示す図である。磁性構造体20は、軸線Aに沿って延びる(すなわち、軸線方向に延びる)円筒状の基材21と、磁歪膜2とを有する。磁性構造体20の詳しい構成は、後述する。図2に示すように、磁歪膜2は、円筒状の基材21の外周面21s上に設けられている。磁歪膜2は、詳しい構成については後述するが、複数の磁歪列部2aを有する。
図3は、磁性構造体20に形成された磁歪膜2を、軸線A(図1参照)に直交する方向から見た場合の図である。図3に示す磁歪膜2のパターンは、一例である。磁歪膜2は、図3に示すように、長さL=(L1+L2)(図3に示す例ではL1=L2)および幅Wの磁歪列部2aを複数、有する。複数の磁歪列部2aは、軸線Aに直交する方向から見て、軸線Aに対して交差する方向に延びている。図3において、隣り合う磁歪列部2aの間隔を、間隔(interspace)Iとして表す。
磁歪膜2は、基材21の軸線方向に並ぶ2つの領域2b,2cを有する。2つの領域2b,2cに跨って、複数の磁歪列部2aが形成されている。一方の領域における磁歪列部2aと、他方の領域における磁歪列部2aとは、前記軸線方向において、磁歪膜2の中心線を挟んで対称に設けられている。すなわち、磁歪膜2の磁歪列部2aは、軸線Aに直交する方向から見て(図3に示す状態で)、V字状に形成されている。
磁歪膜2の磁歪列部2aを上述のような構成にすることで、回転軸を介して基材21にねじりトルクが入力された場合、磁歪膜2における領域2bの磁歪列部2aには、その延伸方向に引張方向または圧縮方向のいずれか一方の力が入力される。磁歪膜2における領域2cの磁歪列部2aには、その延伸方向に引張方向または圧縮方向のうち他方の力が入力される。これにより、磁歪膜2の領域2b,2cの磁歪列部2aでは、透磁率が変化する。
検出ユニット30は、2つの円筒状のコイル3,4と、ヨーク5とを有する。図1に示すように、コイル3,4は、磁性構造体20を囲むように配置されている。図1の例では、コイル3,4は、磁性構造体20に対して前記軸線方向に並んで配置されている。具体的には、図1に示すように、コイル3は、磁歪膜2の一方の領域2bを囲むとともに、コイル4は、磁歪膜2の他方の領域2cを囲むように、磁性構造体20に対して配置されている。ヨーク5は、コイル3,4を配置するための凹部を有する。コイル3,4は、筒状のヨーク5の内側に配置されている。
コイル3,4は、図20に示すように交流電源6に接続されることにより、コイル3,4の周囲に交流磁場を発生する。コイル3,4、ヨーク5および基材21は、磁気回路を構成する。また、コイル3,4は、図20に示すようにトルク検出用回路7にも接続されている。
図20は、トルクセンサ1に含まれる電子回路の構成の一例を示す図である。トルクセンサ1に含まれる電子回路として、図20に示す回路構成が広く知られている。図20に示す回路は、交流電源6と、トルク検出用回路7とを有する。交流電源6は、コイル3,4に交流電圧を印加する。トルク検出用回路7は、コイル3,4に生じる電圧を検出することにより、基材21に生じているトルクを検出する。トルク検出回路7は、コイル3,4にそれぞれ生じる電圧の差分Voutを求めた後、図示しない演算回路によって、該差分Voutに基づいて基材21に生じているトルクを求める。なお、トルクセンサ1に含まれる電子回路は、図20に示す構成に限定されない。
既述のとおり、回転軸を介して基材21にねじりトルクが入力された場合、トルクセンサ1における磁歪膜2の領域2b,2cにおける磁歪列部2aには、その延伸方向に引張り方向または圧縮方向の力が入力される。よって、磁歪膜2の領域2b,2cでは、磁歪列部2aに生じる透磁率の変化が異なる。このような透磁率の変化の違いは、トルク検出用回路7において、コイル3,4に生じる電圧の違いとして検出される。したがって、トルク検出用回路7によって、基材21に入力されたねじりトルクを検出することができる。
より具体的には、基材21にトルクが作用したとき、磁歪膜2における領域2b,2cのうち一方の領域の磁歪列部2aに引張応力が生じるため、該磁歪列部2aの透磁率は増大する。他方の領域の磁歪列部2aには圧縮応力が作用するため、該磁歪列部2aの透磁率は減少する。その結果、2つのコイル3,4のインピーダンスに差が生じる。このインピーダンスの差によって生じるコイル3,4の電圧差が、基材21に作用したトルクに応じた値として、トルク検出用回路7によって検出される。図20において、トルクがゼロのときのVoutをV0とし、定格トルクが入力されたときのVoutをVtとした場合、Vt-V0がトルクセンサ1の出力範囲である。
なお、図1に示すトルクセンサ1中の各構成部材の配置は一例である。コイル3,4およびヨーク5の数や配置等は、図1に示す構成に限定されず、当業者が適宜変更することができる。
1.2.磁歪列部の形状
図3に示す磁歪膜2の磁歪列部2aの長さL/幅Wは、下記式(2)を満たす。磁歪列部2aは、磁歪膜2の領域2bでは、軸線Aに直交する方向から見て、軸線Aに対して交差する第1の方向に延びている。磁歪列部2aは、磁歪膜2の領域2cでは、軸線Aに直交する方向から見て、前記第1の方向と交差する第2の方向に延びている。すなわち、磁歪列部2aは、基材21の軸線方向において、磁歪膜2の中央部分に、角度θで折れ曲がった曲部Zを有する。磁歪列部2aは、下記式(1)で定義される被覆率が30%以上95%以下である。
図3に示す磁歪膜2の磁歪列部2aの長さL/幅Wは、下記式(2)を満たす。磁歪列部2aは、磁歪膜2の領域2bでは、軸線Aに直交する方向から見て、軸線Aに対して交差する第1の方向に延びている。磁歪列部2aは、磁歪膜2の領域2cでは、軸線Aに直交する方向から見て、前記第1の方向と交差する第2の方向に延びている。すなわち、磁歪列部2aは、基材21の軸線方向において、磁歪膜2の中央部分に、角度θで折れ曲がった曲部Zを有する。磁歪列部2aは、下記式(1)で定義される被覆率が30%以上95%以下である。
図3に示す例では、磁歪列部2aは、軸線Aに直交する方向から見て、磁歪膜2の領域2bにおいて、磁歪膜2における前記軸線方向の端部Xから、軸線Aと交差して磁歪膜2における前記軸線方向の中央部(磁歪列部2aの曲部(bending portion)Z)に向かって延びている。磁歪膜2の領域2bにおける磁歪列部2aの延伸方向が上述の第1方向に相当する。また、磁歪列部2aは、軸線Aに直交する方向から見て、磁歪膜2の領域2cにおいて、前記第1の方向と角度θをなす方向に、すなわち、磁歪膜2における前記軸線方向の中央部(磁歪列部2aの曲部Z)から、軸線Aと交差して磁歪膜2における前記軸線方向のもう一方の端部Yに向かって延びている。磁歪膜2の領域2cにおける磁歪列部2aの延伸方向が上述の第2方向に相当する。
上述のように、図3は、磁歪列部2aが曲部Zを有する磁歪膜2の例を示している。ここで、曲部Zは、磁歪列部2aにおける第1の部分2m(領域2bの磁歪列部2a)と第2の部分2n(領域2cの磁歪列部2a)との交点である。すなわち、図3に示す磁歪膜2では、1本の磁歪列部2aは、磁歪膜2における前記軸線方向の一方の端部Xから曲部Zまで延びる第1の部分2mと、曲部Zから磁歪膜2における前記軸線方向の他方の端部Yまで延びる第2の部分2nとを有する。
被覆率=基材21の外周面21sにおいて磁歪膜2と接する領域の面積/基材21の外周面21sの総面積(%)・・・(1)
30≦長さL/幅W≦120 ・・・(2)
30≦長さL/幅W≦120 ・・・(2)
図3に示す磁歪膜2において、磁歪列部2aの長さL/幅Wは、第1の部分2mにおける磁歪列部2aの長さ/幅と、第2の部分2nにおける磁歪列部2aの長さ/幅との和である。第1の部分2mにおける磁歪列部2aの長さ/幅は、(図3に示す磁歪列部2aの端部Xから曲部Zまでの距離L1)/(第1の部分2mにおける磁歪列部2aの幅)によって求められる。第2の部分2nにおける磁歪列部2aの長さ/幅は、(図3に示す磁歪列部2aの曲部Zから端部Yまでの距離L2)/(第2の部分2nにおける磁歪列部2aの幅)によって求められる。
上記式(1)で規定される被覆率が上記の範囲(30%以上95%以下)にあることにより、良好な感度を有するトルクセンサ1を実現することができる。すなわち、上記式(1)において、被覆率が30%以上の場合には、トルクセンサ1において十分な感度が得られる。前記被覆率が95%以下の場合には、磁歪膜2の形状にばらつきが生じにくい。よって、前記被覆率が95%以下の場合には、隣り合う磁歪列部2a同士で接触する部位が生じないため、トルクセンサ1は十分な感度が得られる。前記被覆率は、好ましくは50%以上である。前記被覆率は、より好ましくは60%以上である。前記被覆率は、93%以下が好ましい。また、前記被覆率は、90%以下がより好ましい。前記被覆率は、85%以下がさらに好ましい。
また、前記長さL/幅Wが上記式(2)の範囲内にあることにより、良好な感度を有するトルクセンサ1を得ることができる。上記式(2)において、前記長さL/幅Wが30以上の場合、トルクセンサ1は十分な感度が得られる。前記長さL/幅Wが120以下の場合には、磁歪膜2の製造を容易に行うことができる。前記長さL/幅Wは、好ましくは95未満である。前記長さL/幅Wは、より好ましくは85未満である。前記長さL/幅Wは、好ましくは43以上である。前記長さL/幅Wは、より好ましくは53以上である。前記長さL/幅Wは、さらに好ましくは75以上である。
また、感度をより高めるという観点から、磁歪列部2aが曲部Zを有する場合、磁歪列部2aの曲部Zにおいて、前記第1の方向と前記第2の方向とのなす角度(図3におけるθ、換言すると、第1の部分2mと第2の部分2nとのなす角度)が60°以上120°以下であることが好ましい。前記角度は、80°以上であることがより好ましい。前記角度は、100°以下であることが好ましい。なお、磁歪列部2aが曲部を有さない場合(例えば図12に示す磁歪膜902の磁歪列部902a)でも同様に、第1の部分2mと第2の部分2nとのなす角度が上述した範囲内であれば、トルクセンサ1の感度をより高めることができる。
また、トルクセンサ1の感度をさらに高めるという観点から、磁歪列部2aにおいて、図3に示すように、基材21の軸線Aに対して直交する方向から見て、軸線Aと前記第1の方向とのなす角度θ1の絶対値が30°以上60°以下が好ましい(より好ましくは角度θ1が±45°)。基材21と前記第2の方向とのなす角度θ2の絶対値は、30°以上60°以下(より好ましくは角度θ2が±45°)が好ましい。
図3に示す磁歪膜2は、隣り合う磁歪列部2aにおける前記軸線方向の端部同士を連結する連結部26をさらに含む。図3に示す磁歪膜2では、連結部26が、磁歪列部2aにおける前記軸線方向の両端部にそれぞれ設けられている。複数の磁歪列部2aを連結する連結部26が磁歪膜2に設けられていることにより、複数の磁歪列部2aが基材21から剥離しにくくなる。よって、磁歪膜2の強度を向上することができる。
1.3.磁歪膜のパターンの具体例
図4ないし図12は、図2に示す磁性構造体20の磁歪膜2における磁歪列部2aの他の例を示す図である。
図4ないし図12は、図2に示す磁性構造体20の磁歪膜2における磁歪列部2aの他の例を示す図である。
図4に示す磁歪膜102は、図3に示す磁歪膜2とは、磁歪列部102aにおける第1の部分102mと第2の部分102nとのなす角度θが異なる。より具体的には、図4に示す磁歪膜102では、角度θが90°超(かつ180°未満)である。
なお、図4において、符号120は、磁性構造体である。符号126は、連結部である。
図5に示す磁歪膜202には、図3に示す磁歪膜2と同様に、隣り合う磁歪列部202aの端部同士を連結する連結部226が、磁歪列部202aにおける前記軸線方向の両方の端部にそれぞれ設けられている。また、磁歪膜202には、隣り合う磁歪列部202aの曲部Z同士を連結する連結部226が設けられている。図5に示す磁歪膜202では、隣り合う磁歪列部202aの曲部Z同士を連結する連結部226が設けられていることにより、複数の磁歪列部202aを含む磁歪膜202の強度がより高められている。
なお、図5において、符号220は、磁性構造体である。符号202mは、磁歪列部202aにおける第1の部分である。符号202nは、磁歪列部202aにおける第2の部分である。
図6に示す磁歪膜302を構成するパターン302aでは、図5に示す磁歪膜202と同様に、隣り合う磁歪列部2aにおける前記軸線方向の端部同士を連結する連結部326が、磁歪列部302aにおける前記軸線方向の両端部、および、曲部Z同士をそれぞれ連結している。磁歪膜302には、隣り合う磁歪列部302aを、第1の部分302mにおける前記軸線方向の中央部同士、および、第2の部分302nにおける前記軸線方向の中央部同士をそれぞれ連結する連結部326がさらに設けられている。図6に示す磁歪膜302では、隣り合う磁歪列部302aにおける第1の部分302m同士または第2の部分302n同士を連結する連結部326が設けられていることにより、磁歪膜302の強度がさらに高められている。
なお、図6において、符号320は、磁性構造体である。
図7に示すように、隣り合う磁歪列部402a同士を連結する連結部426のうち、前記軸線方向の端部同士を連結する連結部426以外の連結部426は、複数の磁歪列部402aのうち一部のみを連結してもよい。
なお、図7において、符号420は、磁性構造体である。符号402は、磁歪膜である。符号402aは、磁歪列部である。符号402mは、磁歪列部402aにおける第1の部分である。符号402nは、磁歪列部402aにおける第2の部分である。
また、図8に示すように、磁歪膜502には連結部が設けられていなくてもよい。また、図9に示すように、磁歪膜602は、基材の外周面の一部のみに設けられた複数の磁歪列部602aを有していてもよい。また、図10に示すように、磁歪膜702における隣り合う磁歪列部702aの間隔が均一でなくてもよい。また、図11に示すように、磁歪膜802における複数の磁歪列部802aの幅Wが均一でなくてもよい。なお、図11に示すように、磁歪膜802が、幅Wが異なる複数の磁歪列部802aを有する場合、上記式(2)で規定される長さL/幅Wは、各磁歪列部802aの長さL/幅Wの平均値を表す。
なお、図8において、符号520は、磁性構造体である。符号502aは、磁歪列部である。符号502mは、磁歪列部502aにおける第1の部分である。符号502nは、磁歪列部502aにおける第2の部分である。
図9において、符号626は、連結部である。図10において、符号720は、磁性構造体である。符号726は、連結部である。図11において、符号826は、連結部である。
図12に示す磁歪膜902は、図3に示す磁歪膜2の変形例の一つである。図12に示す磁歪膜902では、図2に示す磁歪列部2aの曲部Zの代わりに隙間27を設けることにより、第1の部分902mと第2の部分902nとを分離させている。図12に示す磁歪膜902では、磁歪列部902aが途中で途切れるため、図3ないし図11に示す構成に比べて、反磁界係数が増大する。これにより、トルクセンサの感度は、図3に示す磁歪膜の構成に比べて、若干低くなる。
なお、図12に示す磁歪列部902aにおいて、上記式(2)の長さL/幅Wは、(前記軸線方向において、第1の部分902mにおける一方の端部X1から他方の端部X2までの距離)/(第1の部分902mにおける磁歪列部902aの幅)、または、(前記軸線方向において、第2の部分902nにおける一方の端部Y1から他方の端部Y2までの距離)/(第2の部分2nにおける磁歪列部902aの幅)を表す。
図12において、符号920は、磁性構造体である。符号926は、連結部である。
図13に示す磁歪膜1002は、前記軸線方向における曲部Zの位置が図3に示す磁歪膜2とは異なる。より具体的には、図3に示す磁歪膜2では、磁歪列部2aを構成する第1の部分2mの長さL1と第2の部分2nの長さL2とが等しい。また、図3に示す磁歪膜2では、前記軸線方向において、磁歪膜2の中心線を挟んで磁歪列部2aが線対称の形状を有する。これに対し、図13に示す磁歪膜1002では、第1の部分1002mの長さと第2の部分1002nの長さとが異なる(図13では、第1の部分1002mの長さが第2の部分1002nの長さよりも長い場合を示す)。第1の部分1002mと第2の部分1002nとの長さの比率は、0.5以上で2以下が好ましい。
図13において、符号1020は、磁性構造体である。符号1026は、連結部である。
1.4.磁性構造体の断面
図14は、図1に示す磁性構造体20の断面を模式的に示す。図14に示す断面は、磁歪列部2aにおいて延伸方向と直交する面で磁性構造体20を切断することにより得られる断面である。より具体的には、図14に示す断面は、磁歪列部2aを第1の方向(図2における磁歪膜2の端部Xから曲部Zに向かう方向)と垂直な面で切断した場合の断面(図3のC-C線に沿って紙面と垂直方向に切断した断面)である。図14に示すように、磁性構造体20は、円筒状の基材21と、該基材21の外周面21sに設けられた磁歪膜2とを含む。なお、図14における「M」は、図3の「W」に相当する。
図14は、図1に示す磁性構造体20の断面を模式的に示す。図14に示す断面は、磁歪列部2aにおいて延伸方向と直交する面で磁性構造体20を切断することにより得られる断面である。より具体的には、図14に示す断面は、磁歪列部2aを第1の方向(図2における磁歪膜2の端部Xから曲部Zに向かう方向)と垂直な面で切断した場合の断面(図3のC-C線に沿って紙面と垂直方向に切断した断面)である。図14に示すように、磁性構造体20は、円筒状の基材21と、該基材21の外周面21sに設けられた磁歪膜2とを含む。なお、図14における「M」は、図3の「W」に相当する。
1.4.1.磁歪膜
磁歪膜2は、磁性体材料を含む材料によって構成されている。前記磁性体材料は、強磁性体材料が好ましい。具体的には、前記磁生体材料は、例えば、Ni、Fe、Co、およびCrから選ばれる少なくとも1種の金属を含むことが好ましい。高い透磁率および高い磁歪効果が得られるという観点から、前記磁性体材料は、Feと、Ni、CoおよびCrから選ばれる少なくとも1種とを含むことがより好ましい。また、磁歪膜2は、Al、Ti、Ge、Mo、Ag、Cu等の金属、または、Si、B、S、C、O、N等の非金属材料をさらに含んでいてもよい。
磁歪膜2は、磁性体材料を含む材料によって構成されている。前記磁性体材料は、強磁性体材料が好ましい。具体的には、前記磁生体材料は、例えば、Ni、Fe、Co、およびCrから選ばれる少なくとも1種の金属を含むことが好ましい。高い透磁率および高い磁歪効果が得られるという観点から、前記磁性体材料は、Feと、Ni、CoおよびCrから選ばれる少なくとも1種とを含むことがより好ましい。また、磁歪膜2は、Al、Ti、Ge、Mo、Ag、Cu等の金属、または、Si、B、S、C、O、N等の非金属材料をさらに含んでいてもよい。
例えば、磁歪膜2がFeを含む場合、より高い透磁率およびより高い磁歪効果を得る観点から、磁歪膜2中のFeの含有量は、20質量%以上40質量%以下であることが好ましい。Feの含有量は、23質量%以上であることがより好ましい。Feの含有量は、26質量%以上であることがさらに好ましい。Feの含有量は、36質量%以下であることがより好ましい。Feの含有量は、33質量%以下であることがさらに好ましい。Fe以外の金属(Ni、CoおよびCrから選ばれる少なくとも1種)の含有量の合計は、60質量%以上80質量%以下であることが好ましい。Fe以外の金属の含有量の合計は、64質量%以上であることがより好ましい。Fe以外の金属の含有量の合計は、67質量%以上であることがさらに好ましい。Fe以外の金属の含有量の合計は、77質量%以下であることがより好ましい。Fe以外の金属の含有量の合計は、74質量%以下であることがさらに好ましい。
なお、磁歪膜2がFeおよびNiを含む場合において、Niの含有量は、60質量%以上80質量%以下であることが好ましい。Niの含有量は、64質量%以上であることがより好ましい。Niの含有量は、67質量%以上であることがさらに好ましい。Niの含有量は、77質量%以下であることがより好ましい。Niの含有量は、74質量%以下であることがさらに好ましい。
また、磁歪膜2がSを含む場合、磁歪膜2中のSの含有量は、0.03質量%以上0.12質量%以下であることが好ましい。Sの含有量は、0.04質量%以上0.10質量%以下であることがより好ましい。Sの含有量は、0.05質量%以上0.09質量%以下であることがさらに好ましい。
磁歪膜2の最大膜厚H(磁歪膜2が基材21と接する面(基材21の外周面21s)から、基材21の径方向外方に向かって磁歪膜2が最も突出する位置までの距離)は、20μm以上200μm以下である。最大膜厚Hは、40μm以上であることが好ましい。最大膜厚Hは、60μm以上であることがより好ましい。最大膜厚Hは、140μm以下であることが好ましい。最大膜厚Hは、100μm以下であることがより好ましい。
磁歪膜2の磁歪列部2aは、その延伸方向に直交する断面で見て、基材21の径方向と直交する方向(基材21の外周面21sに平行な方向)において、基材21の径方向外方側に、磁歪列部2aにおける基材21側の部分の長さよりも長い部分を有する。具体的には、磁歪列部2aは、基材21上に形成された本体部分から、基材21の径方向と直交する方向の一方及び他方にそれぞれ突出する突出部2eを有する。磁歪列部2aが突出部2eを有することにより、磁歪列部2aの表面積が増大する。
なお、この場合、磁歪列部2aと基材21との接触面と、突出部2eの突出方向とのなす角度θeは、鋭角(90°未満)が好ましい。この場合、センサの感度をより向上する観点から、角度θeは、0°を超え45°以下であることがより好ましい。角度θeは、30°以下であることがさらに好ましい。
磁歪膜2の磁歪列部2aは、上述のような突出部2eを有することにより、図14に示す断面において、基材21の外周面21sから、基材21の径方向(磁歪列部2aの厚み方向)に所定距離の位置における幅Mが、磁歪膜2と基材21の外周面21sとの接触部分2fの幅Nよりも長い。
すなわち、磁歪膜2における複数の磁歪列部2aは、該磁歪列部2aをその延伸方向と直交する断面(図14に示す断面)で見て、基材21の径方向と直交する方向において、最も長い部分の長さ(前記所定距離の位置における長さM、以下、最大幅寸法Mという)が、磁歪膜2と基材21の外周面21sとの接触部分2fの長さNよりも大きい。前記最大幅寸法Mは、隣り合う磁歪列部2aの間隔Dよりも大きい。隣り合う磁歪列部2aの間隔Dは、磁歪列部2aと基材21との接触部分2fと、その隣りの磁歪列部2aと基材21との接触部分2fとの間隔を意味する。
磁歪膜2において、上述のような形状を有する磁歪列部2aを形成することにより、トルクセンサ1の感度を高めることができる。すなわち、磁歪膜2は、磁歪列部2aを延伸方向と直交する断面で見て、磁歪列部2aの最大幅寸法Mが、隣り合う磁歪列部2aの間隔Dよりも大きい。このような構成では、磁歪列部2a同士の間隔Dは、比較的狭い。このように隣り合う磁歪列部2aの間隔Dが狭い場合において、磁歪列部2aにおける最大幅寸法Mを、磁歪膜2と基材21の外周面21sとの接触部分2fの長さNよりも大きくすることにより、磁歪列部2aの表面積、すなわち磁歪膜2の表面積を増加させることができる。磁歪膜2の表面積を増加させることにより、磁歪膜2の透磁率を広範囲で変化させることができる。これにより、磁歪膜2に力が加わった際の透磁率の変化を容易に検出することができる。したがって、トルクセンサ1の感度を向上することができる。
換言すれば、上述の構成により、上記式(1)で規定される被覆率や上記式(2)で規定される長さL/幅Wの値を変えずに、トルクセンサ1の感度を高めることができる。
また、磁歪列部2aは、基材21の外周面21sとの接触部分2fと、隣りの磁歪列部2aにおける基材21の外周面21sとの接触部分2fとの間隔Dが、突出部2eが前記隣りの磁歪列部2aに向かって突出する長さと、該隣りの磁歪列部2aの突出部2eが前記磁歪列部2aに向かって突出する長さとの和よりも大きい。
これにより、隣り合う磁歪列部2aにおいて、突出部2e同士が接触することを防止することができる。
また、磁歪列部2aは、図14に示す断面で見て、最大幅寸法Mが、磁歪列部2aの厚み方向における高さ(最大膜厚)Hよりも大きい。これにより、磁歪列部2aは、厚み方向よりも基材21の径方向と直交する方向(基材21の外周面21sに平行な方向)に長い扁平状に形成される。よって、磁歪列部2aの表面積をより大きくすることができる。したがって、磁歪膜2に力が加わった際の透磁率の変化をより容易に検出することができる。
また、図14に示す断面において、センサの感度をより高める観点から、磁歪列部2aの最大膜厚Hと、磁歪列部2aの端部meにおける高さ(磁歪列部2aと基材21との接触面から突出部2eの先端までの距離、すなわち、基材21の外周面21sから、最大幅寸法Mの位置までの高さ)H1との比H1/Hが1未満である。H1/Hは、好ましくは、0.8以下である。H1/Hは、より好ましくは、0.5以下である。H1/Hは、さらに好ましくは、0.3以下である。一方、H1/Hは、0.015以上が好ましい。
磁歪列部2aを、H1/Hが上述の範囲になるように形成することにより、磁歪列部2aの表面積をより大きくすることができる。したがって、磁歪膜2に力が加わった際の透磁率の変化をより容易に検出することができる。
なお、H1/Hを0.5以下にすることにより、すなわち、磁歪列部2aの最大膜厚Hの半分の高さを、基材21の外周面21sから最大幅寸法Mの位置までの高さ以上にすることにより、磁歪列部2aの厚み方向において、基材21の外周面21sとの接触部分2fよりも幅寸法が大きい部分を、広い範囲に設けることができる。よって、磁歪列部2aの表面積をさらに大きくすることができる。したがって、磁歪膜2に力が加わった際の透磁率の変化をさらに容易に検出することができる。
図17、図18および図19は、いずれも、磁性構造体の他の一例を、図2と同様の断面で示した図(磁歪列部2aの延伸方向と直交する面で切断して得られる断面)である。図17、図18および図19では、基材21の外周面21sと、磁歪列部2002a,3002a,4002aにおける突出部2002e,3002e,4002eの突出方向とのなす角度θe、および、比H1/Hが、図14に示す例とはそれぞれ異なる場合(θeがそれぞれ20°、5°、3°、比H1/Hが0.5、0.2、0.1)を示している。
なお、図15に示すように、磁歪列部5002aが矩形状の断面を有する場合(磁歪列部5002aが突出部2eを有さない場合)、磁歪列部5002aの表面積は、図14、図17ないし19の断面を有する磁歪列部2002a,3002a,4002aと比べて小さい。よって、トルクセンサの感度は、図14、図17ないし19の断面を有する磁歪列部2002a,3002a,4002aと比べて劣る。
1.4.2.基材
基材21は、磁歪膜2と異なる成分の材料、例えば、磁歪膜2よりも透磁率が低い材料によって構成されている。基材21は、磁性体材料によって構成されるのが好ましく、Fe、Ni、Co、Cr等の強磁性体材料によって構成されるのがより好ましい。なお、基材21は、Al、Ti、Ge、Mo、Ag、Cu等の金属や、Si、B、S、C、O、N等の非金属材料を含んでいてもよい。
基材21は、磁歪膜2と異なる成分の材料、例えば、磁歪膜2よりも透磁率が低い材料によって構成されている。基材21は、磁性体材料によって構成されるのが好ましく、Fe、Ni、Co、Cr等の強磁性体材料によって構成されるのがより好ましい。なお、基材21は、Al、Ti、Ge、Mo、Ag、Cu等の金属や、Si、B、S、C、O、N等の非金属材料を含んでいてもよい。
1.4.3.レジスト層
磁性構造体20は、磁歪膜2の表面に設けられたレジスト層をさらに含んでいてもよい。この場合、レジスト層の膜厚は45μm以下が好ましい。
磁性構造体20は、磁歪膜2の表面に設けられたレジスト層をさらに含んでいてもよい。この場合、レジスト層の膜厚は45μm以下が好ましい。
1.5.磁性構造体の製造方法
図16の(a)および(b)は、磁性構造体20の製造方法を説明するための図である。なお、図16は、磁性構造体20の製造過程において、基材21、磁歪膜2、レジスト層91等を、図14と同じ面で切断して示す断面図である。
図16の(a)および(b)は、磁性構造体20の製造方法を説明するための図である。なお、図16は、磁性構造体20の製造過程において、基材21、磁歪膜2、レジスト層91等を、図14と同じ面で切断して示す断面図である。
磁性構造体20は、基材21の外周面21sに、所定のパターンのレジスト層91を形成する工程と、レジスト層91が設けられた基材21の外周面21sに、磁歪膜2を形成する工程と、を含む。以下、磁性構造体20の製造方法について具体的に説明する。
まず、図16(a)に示すように、基材21の外周面21s上に所定のパターンのレジスト層91を形成する。このレジスト層91は、図1、図2、図3ないし12に示す磁歪列部2aを形成するために用いられる。レジスト層91は、例えば、水転写、スクリーン印刷などの公知の方法で形成することができる。レジスト層91の膜厚は、例えば3μm以上45μm以下である。また、磁歪列部2aに突出部2eが形成されるように、基材21の外周面21sとレジスト層91の端部とのなす角θfは鈍角(90°を超える)であることが好ましい。
次に、図16(b)に示すように、レジスト層91が設けられた基材21の表面上に磁歪膜2を形成する。その際、磁歪膜2の高さHが、レジスト層91の高さH1よりも高くなるように磁歪膜2を形成する。磁歪膜2の成膜は、例えば、スパッタリング法、CVD法、めっき法等の公知の方法を採用することができる。次いで、所定の温度(例えば300℃以上1,000℃以下)にて所定時間(例えば1分間以上48時間以下)熱処理を行うことが好ましい。以上により、図14に示す磁歪膜2を有する磁性構造体20が得られる。
本実施形態に係る製造方法によれば、レジスト層91を基材21の表面に形成した後、磁歪膜2を成膜し、熱処理することにより、感度が良好な磁性構造体20を簡便な方法でかつ短い工程にて得ることができる。また、これにより、磁性構造体20の製造コストの低減を図ることができる。
2.電動アシスト付き自転車
本発明の一実施形態に係る電動アシスト付き自転車(例えば、二輪車、三輪車または四輪車)は、上記実施形態に係るトルクセンサ1を備える。本実施形態に係る電動アシスト付き自転車10では、例えば、搭乗者がペダルを踏むことによって生じるトルクをトルクセンサ1が検出する。電動アシスト付き自転車10では、トルクセンサ1によって検出したトルクの値に基づいて、電動モータの駆動が制御される。
本発明の一実施形態に係る電動アシスト付き自転車(例えば、二輪車、三輪車または四輪車)は、上記実施形態に係るトルクセンサ1を備える。本実施形態に係る電動アシスト付き自転車10では、例えば、搭乗者がペダルを踏むことによって生じるトルクをトルクセンサ1が検出する。電動アシスト付き自転車10では、トルクセンサ1によって検出したトルクの値に基づいて、電動モータの駆動が制御される。
図21は、本発明の電動アシスト車両の一例である電動アシスト付き自転車10の概略構成を示す図である。図21において、左右、前後、上下とはそれぞれ、電動アシスト付き自転車10のサドル34に搭乗者71がそのハンドル77に向かって着座した状態を基準とした左右、前後、上下を意味する。
図21に示すように、電動アシスト付き自転車10はフレーム12を含む。フレーム12は、ヘッドパイプ14、上部パイプ16、フロントパイプ18、シートパイプ70、一対のリヤパイプ72および一対の下部パイプ74を含む。上部パイプ16は、ヘッドパイプ14から後方かつ水平方向に延びる。フロントパイプ18は、ヘッドパイプ14から後方斜め下方向へ延びる。シートパイプ70は、上部パイプ16の後端部とフロントパイプ18の後端部とを連結する。一対のリヤパイプ72は、上部パイプ16とシートパイプ70との接続部から後方且つ下方向に斜めに延びている。一対の下部パイプ74は、フロントパイプ18とシートパイプ70との接続部から後方に向かって水平方向に延びている。一対のリヤパイプ72の後端部と一対の下部パイプ74の後端部とは、それぞれ接続されている。
ヘッドパイプ14内には、車両の進行方向変更用のステアリング軸76がヘッドパイプ14に沿うように設けられている。このステアリング軸76は、ヘッドパイプ14内で回転可能である。ステアリング軸76の上端にはハンドル77が取り付けられている。ステアリング軸76の下端には左右一対のフロントフォーク80が取り付けられている。フロントフォーク80の下端には、前輪82が取り付けられている。前輪82は、フロントフォーク80によって支持された前輪82の中心軸を中心に回転可能である。シートパイプ70の上端部にはサドル34が設けられている。シートパイプ70には、後方に延びるように荷台36が固定されている。
フロントパイプ18とシートパイプ70との接続部には、モータ駆動ユニット38が配置されている。図22に、電動アシスト付き自転車10のモータ駆動ユニット38の概略構成を示す。モータ駆動ユニット38は、上記実施形態に係るトルクセンサ1を含む。より具体的には、図22に示すように、モータ駆動ユニット38は、クランク軸40、駆動スプロケット42、クランク角センサ44およびトルクセンサ1、電動モータ48およびコントローラ50を含む。モータ駆動ユニット38は、電動アシスト付き自転車ではない自転車に取り付け可能に構成されていてもよいし、既存の電動アシスト付き自転車のモータ駆動ユニットと交換可能に構成されていてもよい。
図21に示すように、クランク軸40には、クランク52を介してペダル54が取り付けられている。また、クランク軸40の外周面には駆動スプロケット42(図22参照)が取り付けられている。駆動スプロケット42は、無端状のチェーン56を介して後輪スプロケット58に連結されている。後輪スプロケット58には、回転軸60を介して後輪62が取り付けられている。後輪62は回転軸60を中心として回転可能である。
図示しないが、クランク角センサ44およびトルクセンサ1は、クランク軸40の近傍に配置されている。クランク角センサ44は、ペダル54の操作によって回転するクランク軸40の回転角度であるクランク角θcを検出する。トルクセンサ1は、クランク軸40に加わるトルクであるクランクトルクτを検出する。電動モータ48は、駆動スプロケット42に与える補助駆動力を発生する。
コントローラ50は、CPU64およびメモリ66を含む。CPU64は、必要な演算を行い、電動モータ48および電動アシスト付き自転車10の動作を制御する。記憶手段であるメモリ66は、例えばEEPROMからなり、電動アシスト付き自転車10の動作を制御するためのプログラムやデータおよび演算データ等を格納する。メモリ66は、アシストパターンを格納する。
シートパイプ70には、電動モータ48に電力を供給するための電池(例えば、ニッケル(Ni)-カドミウム(Cd)電池等の二次電池)からなるバッテリ68が取り付けられている。コントローラ50のCPU64には、クランク角センサ44から出力されるクランク角θcおよびトルクセンサ1から出力されるクランクトルクτが入力される。これらのデータは、メモリ66に格納される。
CPU64は、クランク角θcおよびクランクトルクτに基づいて、電動モータ48で発生させる補助駆動力を制御する。
本実施形態に係る電動アシスト付き自転車10は、トルクを高感度で精度良く検出することができる上記実施形態に係るトルクセンサ1を備えているため、安定した走行が可能である。
(実施形態の効果)
本実施形態では、トルクセンサ1は、軸線Aに沿って延びる筒状の基材21と、基材21の外周面21s上に形成された磁歪膜2とを備える。磁歪膜2は、列状に延びる複数の磁歪列部2aを有する。複数の磁歪列部2aのうち少なくとも一部は、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、基材21の外周面21sに平行な方向において、最も長い部分の長さMが、前記一部を含む磁歪列部2aと基材21の外周面21sとの接触部分2fの長さNよりも大きく、且つ、前記接触部分2fと、前記磁歪列部2aの隣りの磁歪列部2aと基材21の外周面21sとの接触部分2fとの間隔D(磁歪列部2a同士の間隔D)よりも大きい。
本実施形態では、トルクセンサ1は、軸線Aに沿って延びる筒状の基材21と、基材21の外周面21s上に形成された磁歪膜2とを備える。磁歪膜2は、列状に延びる複数の磁歪列部2aを有する。複数の磁歪列部2aのうち少なくとも一部は、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、基材21の外周面21sに平行な方向において、最も長い部分の長さMが、前記一部を含む磁歪列部2aと基材21の外周面21sとの接触部分2fの長さNよりも大きく、且つ、前記接触部分2fと、前記磁歪列部2aの隣りの磁歪列部2aと基材21の外周面21sとの接触部分2fとの間隔D(磁歪列部2a同士の間隔D)よりも大きい。
上述の構成では、磁歪列部2aは、その延伸方向と直交する断面で見て、基材21の外周面21sに平行な方向に最も長い部分の長さMが、隣り合う磁歪列部2aとの間隔Dよりも大きい。そのため、磁歪列部2a同士の間隔Dは、比較的狭い。このように隣り合う磁歪列部2aの間隔Dが狭い構成において、前記最も長い部分の長さMを、磁歪列部2aと基材21の外周面21sとの接触部分2fの長さNよりも大きくすることで、磁歪列部2aの表面積を増大させることができる。よって、磁歪膜2に力が加わった際の透磁率の変化を容易に検出することができる。これにより、磁歪膜2に寸法上の制約がある中で、トルクセンサ1の感度向上を図ることができる。
複数の磁歪列部2aのうち前記少なくとも一部は、該一部を含む前記磁歪列部2aをその延伸方向と直交する断面で見て、前記最も長い部分の長さMが、磁歪列部2aの最大膜厚Hよりも大きい。
これにより、複数の磁歪列部2aのうち少なくとも一部は、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、磁歪列部2aの厚み方向よりも基材21の外周面21sに平行な方向に長い扁平状に形成される。よって、磁歪列部2aの表面積をより大きくすることができる。したがって、磁歪膜2に力が加わった際の透磁率の変化をより容易に検出することができる。これにより、磁歪膜2に寸法上の制約がある中で、トルクセンサ1の感度をより向上することができる。
複数の磁歪列部2aのうち前記少なくとも一部は、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、磁歪列部2aの最大膜厚Hが、基材21の外周面21sから基材21における前記最も長い部分までの前記厚み方向の高さH1よりも大きい。
これにより、複数の磁歪列部2aのうち少なくとも一部に、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、基材21の外周面21sとの接触部分2fよりも幅寸法が大きい部分を形成することができる。よって、基材21の外周面21sとの接触部分2fよりも幅寸法が大きい部分がない磁歪列部に比べて、磁歪列部の表面積を大きくすることができる。したがって、磁歪膜2に力が加わった際の透磁率の変化を容易に検出することができる。これにより、磁歪膜2に寸法上の制約がある中で、トルクセンサ1の感度を向上することができる。
複数の磁歪列部2aのうち前記少なくとも一部は、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、磁歪列部2aの最大膜厚Mの半分は、基材21の外周面21sから基材21における前記最も長い部分までの前記厚み方向の高さH1以上である。
これにより、複数の磁歪列部2aのうち少なくとも一部に、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、基材21の外周面21sに平行な方向に最も長い部分を、磁歪列部2aの厚み方向により広い範囲に形成することができる。よって、磁歪列部の表面積をより大きくすることができる。したがって、磁歪膜2に力が加わった際の透磁率の変化をより容易に検出することができる。
複数の磁歪列部2aのうち前記少なくとも一部は、該一部を含む磁歪列部2aをその延伸方向と直交する断面で見て、前記接触部分2fと、隣りの磁歪列部2aと基材21の外表面21sとの接触部分2fとの間隔Dが、基材21の外周面21sに平行な方向において、前記最も長い部分が前記接触部分2fに対して前記隣りの磁歪列部2aに向かって突出する長さと、前記隣りの磁歪列部2aにおいて最も長い部分が該隣りの磁歪列部2aと基材21との接触部分2fに対して前記磁歪列部2aに向かって突出する長さとの和よりも大きい。
これにより、隣り合う磁歪列部2aにおいて、前記最も長い部分同士が接触することを防止できる。
磁歪膜2は、複数の磁歪列部2aを連結する連結部26を有する。これにより、磁歪列部2aが基材21から剥離しにくくなる。よって、磁歪膜2の強度向上を図れる。
トルクセンサ1は、磁歪膜2を囲むように配置されたコイル3,4をさらに備える。これにより、磁歪膜2で生じた透磁率の変化を、コイル3,4のインピーダンスの変化によって検出することができる。
コイル3,4は、軸線Aに沿って、複数並んで配置されている。複数のコイル3,4によって、磁歪膜2における透磁率の変化をより確実に検出することができる。したがって、トルクセンサ1の検出精度を向上することができる。
(その他の実施形態)
以上、本発明の実施の形態を説明したが、上述した実施の形態は本発明を実施するための例示に過ぎない。よって、上述した実施の形態に限定されることなく、その趣旨を逸脱しない範囲内で上述した実施の形態を適宜変形して実施することが可能である。
以上、本発明の実施の形態を説明したが、上述した実施の形態は本発明を実施するための例示に過ぎない。よって、上述した実施の形態に限定されることなく、その趣旨を逸脱しない範囲内で上述した実施の形態を適宜変形して実施することが可能である。
前記実施形態では、磁歪式センサの一例としてトルクセンサ1に、本実施形態の構成を適用した場合について説明した。しかしながら、磁歪膜を有するセンサであれば、荷重センサなどの他のセンサに、本実施形態の構成を適用してもよい。同様に、電動アシスト付き自転車に用いるトルクセンサに限らず、他の用途のセンサに、本実施形態の構成を適用してもよい。
前記実施形態では、基材21は円筒状である。しかしながら、基材21は、筒状または柱状であれば、どのような断面形状を有していてもよい。
前記実施形態では、磁歪膜2の磁歪列部2aは、列状に延びている。しかしながら、島状に形成した複数の島状磁歪部のうち少なくとも一部を接続して列状に形成してもよい。また、複数の磁歪列部2aは、互いに接触しなければ、平行でなくてもよい。
前記実施形態では、磁歪膜2における複数の磁歪列部2aが、その延伸方向に亘って、図14に示す断面と同じ断面を有する。しかしながら、磁歪列部2aの断面は、磁歪列部2aの延伸方向の一部で異なっていてもよい。また、複数の磁歪列部2aが、すべて同じ断面形状を有していなくてもよい。
前記実施形態では、磁歪列部2aは、その延伸方向に直交する断面で見て、基材21の外周面21sに平行な方向の一方及び他方にそれぞれ突出する突出部2eを有する。しかしながら、磁歪列部2aは、基材21の外周面21sに平行な方向の一方または他方に突出する突出部を有していてもよい。
前記実施形態では、磁歪列部2aは、その延伸方向と直交する断面で見て、基材21の外周面21sに平行な方向において最も長い部分の長さMが、磁歪列部2aの最大膜厚Hよりも大きい。しかしながら、磁歪列部2aは、前記最も長い部分の長さMが、最大膜厚H以下であってもよい。
前記実施形態では、磁歪列部2aは、その延伸方向と直交する断面で見て、磁歪列部2aの最大膜厚Hの半分が、基材21の外周面21sから基材21における前記最も長い部分までの前記厚み方向の高さH1以上である。しかしながら、磁歪列部2aは、最大膜厚Mの半分が、前記高さH1よりも小さくてもよい。
以下、本発明の実施例について説明するが、本発明は下記実施例に限定されない。
(実施例1)
図16に示す製造方法において、めっき法により、図3に示す磁歪列部2aおよび図14に示す断面を有する磁歪膜2が形成された磁性構造体20を得た。めっきは、硫酸ニッケル、塩化ニッケル、硫酸鉄(II)、ホウ酸等を用いた公知のNi-Fe合金浴(ワット浴)によって行った。めっき条件は、pH3、浴温55℃、電流密度5~20A/dm2とした。また、基材21を周方向に3回転/分で回転させながらめっきを行うことにより、得られるめっき膜(磁歪膜2)の膜厚の均一性を確保した。また、得られた磁歪膜2は、500℃で1時間、窒素雰囲気下で熱処理された。
図16に示す製造方法において、めっき法により、図3に示す磁歪列部2aおよび図14に示す断面を有する磁歪膜2が形成された磁性構造体20を得た。めっきは、硫酸ニッケル、塩化ニッケル、硫酸鉄(II)、ホウ酸等を用いた公知のNi-Fe合金浴(ワット浴)によって行った。めっき条件は、pH3、浴温55℃、電流密度5~20A/dm2とした。また、基材21を周方向に3回転/分で回転させながらめっきを行うことにより、得られるめっき膜(磁歪膜2)の膜厚の均一性を確保した。また、得られた磁歪膜2は、500℃で1時間、窒素雰囲気下で熱処理された。
上述の方法により得られた磁性構造体20は、磁歪列部2aの断面(図14)の最大膜厚Hが85μm、幅Mが460μm、基材21との接触面の長さNが260μm、被覆率が17%、30%、52%、70%、79%(図23)、磁歪列部2aの長さL/幅Wが12、25、32、36、43、54、64、75、84、95、120(図24)であった。磁歪列部2aにおいて、第1の方向と第2の方向とがなす角度θ(図3参照)は、90°であった。図3に示すように基材21の軸線Aと第1の方向とのなす角度θ1は、45°であった。図3に示すように基材21の軸線Aと第2の方向とのなす角度θ2は、45°であった。隣り合う磁歪列部2a同士の間隔Iは、200μmであった。なお、磁歪膜2を製造するために用いたレジスト層91の厚さは、20μmであった。
製造した磁歪膜2は、Fe-Ni合金であった。磁歪膜2中のFe濃度は30質量%、Ni濃度は70質量%であった。基材21の材質は、SCM435(JIS G4053)であった。本実施例で得られた磁性構造体20を用いて、図1の構成を有するトルクセンサ1を製造した。
なお、トルクセンサ1の感度は、トルクセンサ1を図20に示す回路に接続して、80Nmのトルクを印加することにより、測定した。前記回路において、抵抗R1およびR2は、いずれも15Ωの抵抗値を有する抵抗器である。コイルC1およびC2は、いずれも、直径0.2mmの絶縁皮膜付き銅線を124回巻くことによって構成されている。
図23は、本実施例に係るトルクセンサ1における、磁性構造体20の被覆率(横軸)とトルクセンサ1の感度(縦軸)との関係を示すグラフである。図23によれば、被覆率が30%以上95%以下の場合、感度が良好であることが理解できる。
図24は、本実施例に係るトルクセンサ1における、磁性構造体20の磁歪膜パターン2aの長さL/幅W(横軸)とトルクセンサ1の感度(縦軸)との関係(被覆率:70%の場合)を示すグラフである。図24によれば、長さL/幅Wが30未満になると、感度が大きく低下することが理解できる。
図25は、本実施例に係るトルクセンサ1における、磁性構造体20における磁歪膜2の端部の高さH1/磁歪膜2の最大膜厚H(横軸)と、トルクセンサ1の感度(縦軸)との関係を示すグラフである。ここでは、磁歪膜2の最大膜厚Hを85μmとし、レジスト層21の膜厚を3~45μmの間で変えることにより、磁歪膜2の端部の高さH1および角度θeが異なる(H1/Hがそれぞれ0.09(角度θe:2°)、0.12(角度θe:3°)、0.24(角度θe:5°)、0.53(角度θe:15°))複数のトルクセンサ1を製造した。図25によれば、H1/Hが小さいほど、トルクセンサ1の感度が良好であることが理解できる。
(実施例2)
磁歪膜2を図5~11,13に記載されたパターンとした以外は、実施例1と同様の方法にて、図5~11,13に示す磁歪列部および図14に示す断面を有する磁性構造体をそれぞれ得た。本実施例に係る磁性構造体を備えたトルクセンサは、実施例1に係るトルクセンサ1と同等の感度を有していた。
磁歪膜2を図5~11,13に記載されたパターンとした以外は、実施例1と同様の方法にて、図5~11,13に示す磁歪列部および図14に示す断面を有する磁性構造体をそれぞれ得た。本実施例に係る磁性構造体を備えたトルクセンサは、実施例1に係るトルクセンサ1と同等の感度を有していた。
(実施例3)
磁歪膜2を図12に記載されたパターンとした以外は、実施例1と同様の方法にて、図12に示す磁歪列部および図14に示す断面を有する磁性構造体をそれぞれ得た。本実施例に係る磁性構造体を備えたトルクセンサは、実施例1に係るトルクセンサ1よりも若干感度が劣るものの、良好な感度を有していた。
磁歪膜2を図12に記載されたパターンとした以外は、実施例1と同様の方法にて、図12に示す磁歪列部および図14に示す断面を有する磁性構造体をそれぞれ得た。本実施例に係る磁性構造体を備えたトルクセンサは、実施例1に係るトルクセンサ1よりも若干感度が劣るものの、良好な感度を有していた。
(実施例4)
磁歪膜2を形成するためのレジスト層91の厚みを50μmとし、磁歪膜2の厚みを45μmとした以外は、実施例1と同様の方法にて、図3に示す磁歪列部2aおよび図15に示す断面を有する磁性構造体を得た。本実施例に係る磁性構造体を備えたトルクセンサは、実施例1に係るトルクセンサ1と比較して、感度は1/3程度であった。
磁歪膜2を形成するためのレジスト層91の厚みを50μmとし、磁歪膜2の厚みを45μmとした以外は、実施例1と同様の方法にて、図3に示す磁歪列部2aおよび図15に示す断面を有する磁性構造体を得た。本実施例に係る磁性構造体を備えたトルクセンサは、実施例1に係るトルクセンサ1と比較して、感度は1/3程度であった。
本発明は、例えば電動アシスト付き自転車などに用いられる磁歪式センサに利用可能である。
Claims (13)
- 軸線に沿って延びる筒状または柱状の基材と、
前記基材の外周面上に形成された磁歪部とを備え、
前記磁歪部は、列状に延びる複数の磁歪列部を有し、
前記複数の磁歪列部のうち少なくとも一部は、該一部を含む磁歪列部をその延伸方向と直交する断面で見て、前記基材の外周面に平行な方向において、最も長い部分の長さが、前記一部を含む磁歪列部と前記基材の外周面との接触部分の長さよりも大きく、且つ、前記接触部分と、前記磁歪列部の隣りの磁歪列部と前記基材の外周面との接触部分との間隔よりも大きい、磁歪式センサ。 - 請求項1に記載の磁歪式センサにおいて、
前記複数の磁歪列部のうち前記少なくとも一部は、該一部を含む前記磁歪列部をその延伸方向と直交する断面で見て、前記最も長い部分の長さが、前記磁歪列部の厚み方向における高さよりも大きい、磁歪式センサ。 - 請求項1または2に記載の磁歪式センサにおいて、
前記複数の磁歪列部のうち前記少なくとも一部は、該一部を含む前記磁歪列部をその延伸方向と直交する断面で見て、前記磁歪列部の厚み方向における高さが、前記基材の外周面から前記基材における前記最も長い部分までの前記厚み方向の高さよりも大きい、磁歪式センサ。 - 請求項3に記載の磁歪式センサにおいて、
前記複数の磁歪列部のうち前記少なくとも一部は、該一部を含む前記磁歪列部をその延伸方向と直交する断面で見て、前記磁歪列部の厚み方向における高さの半分は、前記基材の外周面から前記基材における前記最も長い部分までの前記厚み方向の高さ以上である、磁歪式センサ。 - 請求項1から4のいずれか一つに記載の磁歪式センサにおいて、
前記複数の磁歪列部のうち前記少なくとも一部は、該一部を含む前記磁歪列部をその延伸方向と直交する断面で見て、前記接触部分と、隣りの磁歪列部と前記基材の外表面との接触部分との間隔が、前記基材の外周面に平行な方向において、前記最も長い部分が前記接触部分に対して前記隣りの磁歪列部に向かって突出する長さと、前記隣りの磁歪列部において最も長い部分が該隣りの磁歪列部と前記基材との接触部分に対して前記磁歪列部に向かって突出する長さとの和よりも大きい、磁歪式センサ。 - 請求項1から5のいずれか一つに記載の磁歪式センサにおいて、
前記磁歪部は、前記複数の磁歪列部を連結する連結部を有する、磁歪式センサ。 - 請求項1から6のいずれか一つに記載の磁歪式センサにおいて、
前記磁歪部を囲むように配置されたコイルをさらに備える、磁歪式センサ。 - 請求項7に記載の磁歪式センサにおいて、
前記コイルは、前記軸線に沿って、複数並んで配置されている、磁歪式センサ。 - 請求項1から8のいずれか一つに記載の磁歪式センサにおいて、
前記磁歪部は、強磁性体材料によって構成されている、磁歪式センサ。 - 軸線に沿って延びる筒状または柱状の基材と、
前記基材の外周面上に形成された磁歪部とを備え、
前記磁歪部は、列状に延びる複数の磁歪列部を有し、
前記複数の磁歪列部のうち少なくとも一部は、該一部を含む磁歪列部をその延伸方向と直交する断面で見て、前記基材の外周面に平行な方向において、最も長い部分の長さが、前記一部を含む磁歪列部と前記基材の外周面との接触部分の長さよりも大きく、且つ、前記接触部分と、前記磁歪列部の隣りの磁歪列部と前記基材の外周面との接触部分との間隔よりも大きい、磁性構造体。 - 請求項10に記載の磁性構造体の製造方法であって、
前記基材の外周面上に、所定のパターンを有するレジスト層を形成する工程と、
前記レジスト層が設けられた前記基材の外周面上に、前記磁歪部を形成する工程とを有する、磁性構造体の製造方法。 - 請求項1から9のいずれか一つに記載の磁歪式センサを備えた、モータ駆動ユニット。
- 請求項1から9のいずれか一つに記載の磁歪式センサを備えた、電動アシスト付き自転車。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP16814456.6A EP3315933B1 (en) | 2015-06-23 | 2016-06-23 | Magnetostrictive sensor, magnetic structure and production method thereof, motor drive unit provided with magnetostrictive sensor, and motor assisted bicycle |
| JP2017524979A JP6373497B2 (ja) | 2015-06-23 | 2016-06-23 | 磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車 |
| US15/853,119 US10184847B2 (en) | 2015-06-23 | 2017-12-22 | Magnetostrictive sensor, magnetic structure and production method thereof, motor drive device provided with magnetostrictive sensor, and motor assisted bicycle |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015125843 | 2015-06-23 | ||
| JP2015125842 | 2015-06-23 | ||
| JP2015-125842 | 2015-06-23 | ||
| JP2015-125843 | 2015-06-23 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/853,119 Continuation-In-Part US10184847B2 (en) | 2015-06-23 | 2017-12-22 | Magnetostrictive sensor, magnetic structure and production method thereof, motor drive device provided with magnetostrictive sensor, and motor assisted bicycle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016208687A1 true WO2016208687A1 (ja) | 2016-12-29 |
Family
ID=57585082
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/068720 WO2016208688A1 (ja) | 2015-06-23 | 2016-06-23 | 磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車 |
| PCT/JP2016/068719 WO2016208687A1 (ja) | 2015-06-23 | 2016-06-23 | 磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/068720 WO2016208688A1 (ja) | 2015-06-23 | 2016-06-23 | 磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10184847B2 (ja) |
| EP (2) | EP3315933B1 (ja) |
| JP (3) | JP6698082B2 (ja) |
| WO (2) | WO2016208688A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108791681A (zh) * | 2017-05-05 | 2018-11-13 | 捷安特电动车(昆山)有限公司 | 一种测量中轴双边力矩、位置角度、转速及功率的装置 |
| CN108801297A (zh) * | 2017-05-05 | 2018-11-13 | 捷安特电动车(昆山)有限公司 | 一种检测中轴双边力矩、位置角度、转速及功率的装置 |
| JP7567307B2 (ja) | 2020-09-16 | 2024-10-16 | 日本精工株式会社 | 自転車 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3315933B1 (en) * | 2015-06-23 | 2019-10-30 | Yamaha Hatsudoki Kabushiki Kaisha | Magnetostrictive sensor, magnetic structure and production method thereof, motor drive unit provided with magnetostrictive sensor, and motor assisted bicycle |
| JP6661502B2 (ja) * | 2016-09-23 | 2020-03-11 | 本田技研工業株式会社 | 磁歪式トルクセンサ、及び磁歪式トルクセンサの製造方法 |
| US11320328B2 (en) * | 2017-05-05 | 2022-05-03 | Giant Electric Vehicle Kunshan Co., Ltd | Operation parameter detecting apparatus for vehicle |
| CN108839751B (zh) * | 2018-05-23 | 2024-03-22 | 铂金橙智能科技(太仓)有限公司 | 同轴中置驱动电机系统及助力车 |
| CN114256555B (zh) | 2019-01-09 | 2023-10-17 | 比亚迪股份有限公司 | 单体电池、无模组框架的电池包、车辆和储能装置 |
| JP7357570B2 (ja) * | 2020-03-03 | 2023-10-06 | 株式会社プロテリアル | 磁歪式トルクセンサの検出回路及び検出方法 |
| DE102020214282A1 (de) | 2020-11-13 | 2022-05-19 | Zf Friedrichshafen Ag | Verfahren zum Herstellen eines Verformungskörpers zum Messen einer Kraft und/oder eines Drehmoments für ein Wankstabilisierungssystem für ein Fahrzeug und Verformungskörper |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH032638A (ja) * | 1989-05-31 | 1991-01-09 | Mitsubishi Electric Corp | 歪検出器 |
| JPH0354429A (ja) * | 1989-06-21 | 1991-03-08 | Eaton Corp | 磁気ひずみセンサおよびその製造方法 |
| JPH04329325A (ja) * | 1991-04-30 | 1992-11-18 | Nissan Motor Co Ltd | トルク検出装置 |
| JPH0572064A (ja) * | 1991-07-12 | 1993-03-23 | Nissan Motor Co Ltd | 被測定軸,トルク検出装置および被測定軸の製造方法 |
| JP2004184189A (ja) * | 2002-12-02 | 2004-07-02 | Yamaha Motor Co Ltd | 磁歪式トルクセンサ |
| JP2004264188A (ja) * | 2003-03-03 | 2004-09-24 | Moric Co Ltd | 磁歪トルクセンサ |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60254679A (ja) * | 1984-05-30 | 1985-12-16 | Nissan Motor Co Ltd | トルク検出装置 |
| DE3509552A1 (de) * | 1985-03-16 | 1986-09-18 | Vacuumschmelze Gmbh, 6450 Hanau | Ferromagnetische folie fuer einen drehmomentsensor |
| US4823620A (en) | 1986-02-10 | 1989-04-25 | Nissan Motor Company, Ltd. | Magnetostrictive device for measuring torsional torque |
| US4833926A (en) * | 1987-07-29 | 1989-05-30 | Nissan Motor Co., Ltd. | Magnetostrictive stress measurement apparatus |
| US4852411A (en) * | 1988-12-21 | 1989-08-01 | Eaton Corporation | Torque sensor |
| US5313845A (en) * | 1989-05-31 | 1994-05-24 | Mitsubishi Denki Kabushiki Kaisha | Strain detector |
| JP2800347B2 (ja) | 1990-02-07 | 1998-09-21 | 株式会社豊田自動織機製作所 | 磁歪式トルクセンサ |
| EP0502721B1 (en) | 1991-03-04 | 1995-12-27 | Matsushita Electric Industrial Co., Ltd. | Non-contact detecing type torque sensor |
| US5280729A (en) | 1991-04-30 | 1994-01-25 | Nissan Motor Co., Ltd. | Magnetostrictive torque detecting apparatus |
| JP3114455B2 (ja) * | 1993-02-02 | 2000-12-04 | 三菱マテリアル株式会社 | 磁歪式トルク検出部を有するシャフトおよびその製造方法 |
| JP3018812B2 (ja) * | 1993-02-12 | 2000-03-13 | 三菱マテリアル株式会社 | 磁歪式トルク検出部を有するシャフトの製造方法 |
| US5585574A (en) | 1993-02-02 | 1996-12-17 | Mitsubishi Materials Corporation | Shaft having a magnetostrictive torque sensor and a method for making same |
| JPH098378A (ja) * | 1995-06-14 | 1997-01-10 | Alps Electric Co Ltd | 磁歪素子 |
| JPH11344394A (ja) * | 1998-05-29 | 1999-12-14 | Toyota Autom Loom Works Ltd | トルクセンサ |
| JP2004340783A (ja) | 2003-05-16 | 2004-12-02 | Ntn Corp | トルク検出装置 |
| US7564152B1 (en) * | 2004-02-12 | 2009-07-21 | The United States Of America As Represented By The Secretary Of The Navy | High magnetostriction of positive magnetostrictive materials under tensile load |
| US7401531B2 (en) * | 2005-09-23 | 2008-07-22 | Continental Automotive Systems Us, Inc. | Fabrication of a magnetoelastic torque sensor |
| JP4932206B2 (ja) | 2005-09-27 | 2012-05-16 | 本田技研工業株式会社 | 磁歪式トルクセンサの製造方法 |
| JP4936969B2 (ja) | 2007-04-17 | 2012-05-23 | 株式会社東芝 | 磁歪式トルクセンサシャフトの製造装置 |
| EP3315933B1 (en) * | 2015-06-23 | 2019-10-30 | Yamaha Hatsudoki Kabushiki Kaisha | Magnetostrictive sensor, magnetic structure and production method thereof, motor drive unit provided with magnetostrictive sensor, and motor assisted bicycle |
| JP6413027B2 (ja) * | 2015-10-01 | 2018-10-24 | ヤマハ発動機株式会社 | 磁歪式トルクセンサ |
| JP6413028B2 (ja) * | 2015-10-01 | 2018-10-24 | ヤマハ発動機株式会社 | 磁歪式センサ |
-
2016
- 2016-06-23 EP EP16814456.6A patent/EP3315933B1/en active Active
- 2016-06-23 WO PCT/JP2016/068720 patent/WO2016208688A1/ja active Application Filing
- 2016-06-23 JP JP2017524980A patent/JP6698082B2/ja active Active
- 2016-06-23 EP EP16814457.4A patent/EP3315934B1/en active Active
- 2016-06-23 WO PCT/JP2016/068719 patent/WO2016208687A1/ja active Application Filing
- 2016-06-23 JP JP2017524979A patent/JP6373497B2/ja active Active
-
2017
- 2017-12-22 US US15/853,119 patent/US10184847B2/en active Active
- 2017-12-22 US US15/852,700 patent/US10502646B2/en active Active
-
2019
- 2019-01-18 JP JP2019007272A patent/JP2019056716A/ja not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH032638A (ja) * | 1989-05-31 | 1991-01-09 | Mitsubishi Electric Corp | 歪検出器 |
| JPH0354429A (ja) * | 1989-06-21 | 1991-03-08 | Eaton Corp | 磁気ひずみセンサおよびその製造方法 |
| JPH04329325A (ja) * | 1991-04-30 | 1992-11-18 | Nissan Motor Co Ltd | トルク検出装置 |
| JPH0572064A (ja) * | 1991-07-12 | 1993-03-23 | Nissan Motor Co Ltd | 被測定軸,トルク検出装置および被測定軸の製造方法 |
| JP2004184189A (ja) * | 2002-12-02 | 2004-07-02 | Yamaha Motor Co Ltd | 磁歪式トルクセンサ |
| JP2004264188A (ja) * | 2003-03-03 | 2004-09-24 | Moric Co Ltd | 磁歪トルクセンサ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3315933A4 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108791681A (zh) * | 2017-05-05 | 2018-11-13 | 捷安特电动车(昆山)有限公司 | 一种测量中轴双边力矩、位置角度、转速及功率的装置 |
| CN108801297A (zh) * | 2017-05-05 | 2018-11-13 | 捷安特电动车(昆山)有限公司 | 一种检测中轴双边力矩、位置角度、转速及功率的装置 |
| JP7567307B2 (ja) | 2020-09-16 | 2024-10-16 | 日本精工株式会社 | 自転車 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6698082B2 (ja) | 2020-05-27 |
| EP3315933B1 (en) | 2019-10-30 |
| EP3315933A4 (en) | 2018-06-20 |
| EP3315933A1 (en) | 2018-05-02 |
| US20180120177A1 (en) | 2018-05-03 |
| JP2019056716A (ja) | 2019-04-11 |
| US10184847B2 (en) | 2019-01-22 |
| JPWO2016208687A1 (ja) | 2018-04-12 |
| WO2016208688A1 (ja) | 2016-12-29 |
| EP3315934A4 (en) | 2018-06-20 |
| US20180120178A1 (en) | 2018-05-03 |
| JP6373497B2 (ja) | 2018-08-15 |
| EP3315934B1 (en) | 2020-01-15 |
| US10502646B2 (en) | 2019-12-10 |
| EP3315934A1 (en) | 2018-05-02 |
| JPWO2016208688A1 (ja) | 2018-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6373497B2 (ja) | 磁歪式センサ、磁性構造体およびその製造方法、ならびに、磁歪式センサを備えたモータ駆動ユニットおよび電動アシスト付き自転車 | |
| US7343825B2 (en) | Torque sensor | |
| US8011256B2 (en) | Magnetostrictive torque sensor and method of manufacturing same | |
| JP2007086018A (ja) | 磁歪式トルクセンサ | |
| JP2001133337A (ja) | 磁歪式トルクセンサ及び磁歪式トルクセンサを搭載した電動パワーステアリング装置 | |
| JP2003142755A (ja) | 磁気抵抗センサ及びその製造方法 | |
| JPWO2015182644A1 (ja) | 磁気抵抗素子、磁気センサおよび電流センサ | |
| JP2011506958A (ja) | 薄膜フラックスゲートセンサー | |
| JP6380530B2 (ja) | 異方性磁気抵抗素子、磁気センサおよび電流センサ | |
| CN1265357C (zh) | 磁阻效应磁头及其制造方法 | |
| JP2009192429A (ja) | 磁気センサ及び磁場強度測定方法 | |
| JP4936969B2 (ja) | 磁歪式トルクセンサシャフトの製造装置 | |
| JP2006126130A (ja) | 磁歪式トルクセンサ | |
| JP2006300540A (ja) | 薄膜磁気センサ | |
| JP2011017713A (ja) | 磁気センサ及び磁場強度測定方法 | |
| TWI613121B (zh) | 使用於助力腳踏車的曲柄傳動機構 | |
| WO2015182643A1 (ja) | 磁気抵抗素子、磁気センサおよび電流センサ | |
| JP2008197002A (ja) | 磁気センサ | |
| JPWO2017057750A1 (ja) | 磁歪式センサ | |
| JP6569824B2 (ja) | 磁気抵抗素子、および磁気センサ | |
| JP2012198038A (ja) | 磁性体部材とその製造方法 | |
| JP5927648B2 (ja) | 磁気シールド構造体、電流センサ及び磁気シールド構造体の製造方法 | |
| JP2010181196A (ja) | 磁歪式トルク・回転角検出装置 | |
| JP2019056685A (ja) | 磁気センサ | |
| JP2009115761A (ja) | 磁歪式トルクセンサおよび電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16814456 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017524979 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2016814456 Country of ref document: EP |