WO2014157308A1 - 台車の駆動アシストユニット - Google Patents
台車の駆動アシストユニット Download PDFInfo
- Publication number
- WO2014157308A1 WO2014157308A1 PCT/JP2014/058464 JP2014058464W WO2014157308A1 WO 2014157308 A1 WO2014157308 A1 WO 2014157308A1 JP 2014058464 W JP2014058464 W JP 2014058464W WO 2014157308 A1 WO2014157308 A1 WO 2014157308A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- connecting rod
- carriage
- cart
- main body
- Prior art date
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0033—Electric motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B5/00—Accessories or details specially adapted for hand carts
- B62B5/0026—Propulsion aids
- B62B5/0079—Towing by connecting to another vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B2207/00—Joining hand-propelled vehicles or sledges together
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62B—HAND-PROPELLED VEHICLES, e.g. HAND CARTS OR PERAMBULATORS; SLEDGES
- B62B3/00—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor
- B62B3/002—Hand carts having more than one axis carrying transport wheels; Steering devices therefor; Equipment therefor characterised by a rectangular shape, involving sidewalls or racks
Definitions
- the present invention relates to a drive assist unit for a cart that assists a driving force applied to the cart by an operator.
- JP 2008-126900A discloses an electric cart provided with a drive device that drives the cart via a connecting member.
- the drive device is coupled to the cart via a coupling member having one end pivotably coupled to the cart about a horizontal axis.
- one end of the connecting member is fastened with a bolt and a nut to the rear end portion of the carrier bed of the cart, and the other end of the connecting member is fastened to the driving device with the bolt and the nut. Is done. Therefore, it takes time to connect the drive device to the carriage.
- An object of the present invention is to provide a drive assist unit for a cart that can be easily connected to the cart.
- a drive assist unit for a cart that assists a driving force applied to the cart by an operator is provided in a unit main body that is pivotably connected to the cart, and the unit main body.
- An operation unit that is pressed by an operator and capable of inputting a driving force to the carriage via the unit main body, and an assist unit that is rotatably provided in the front-rear direction of the unit main body and that corresponds to the operation of the operation unit
- a driving wheel to which a force is applied a lower engagement mechanism that can be engaged with the carriage by pressing the unit main body against the carriage, and a locking member provided above the lower engagement mechanism.
- an upper engagement mechanism that can be engaged with the carriage by being fitted.
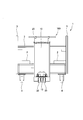
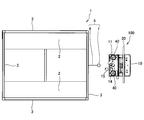
- FIG. 1 is a perspective view of a drive assist unit of a cart and a cart according to an embodiment of the present invention.
- FIG. 2 is a side view of FIG.
- FIG. 3 is a rear view of FIG. 4 is a plan view of FIG.
- FIG. 5 is a perspective view of the drive assist unit of the cart according to the embodiment of the present invention.
- FIG. 6 is a perspective view showing the internal structure of the drive assist unit of the carriage according to the embodiment of the present invention.
- FIG. 7 is a side view of FIG.
- FIG. 8 is an enlarged view of a portion VIII in FIG. 5 and shows a state where the upper engagement mechanism is not engaged with the connecting rod.
- FIG. 9 is a view showing a state where the upper engagement mechanism is engaged with the connecting rod in FIG.
- FIG. 9 is a view showing a state where the upper engagement mechanism is engaged with the connecting rod in FIG.
- FIG. 9 is a view showing a state where the upper engagement mechanism is engaged with the connecting rod in FIG
- FIG. 10 is an enlarged view of a portion X in FIG. 5 and shows a state in which the lower engagement mechanism is not engaged with the connecting rod.
- 11 is a view showing a state where the lower engagement mechanism is engaged with the connecting rod in FIG.
- FIG. 12 is a side view showing a state before the drive assist unit of the carriage is connected to the carriage.
- FIG. 13A is a plan view of FIG. 13B is a cross-sectional view taken along the line XIIIB-XIIIB in FIG.
- assist unit 100 a cart drive assist unit (hereinafter simply referred to as “assist unit”) 100 according to an embodiment of the present invention will be described with reference to the drawings.
- the carriage 1 is used to carry heavy objects at a factory, for example.
- the cart 1 includes a loading platform 2 that is formed in a rectangular shape, a standing portion 3 that is erected upward from four sides of the outer periphery of the loading platform 2, and four corners of the loading platform 2. It is a cart with four wheels 4 to support. The carriage 1 can be moved by the rotation of the wheels 4.
- the cart 1 is not limited to the cart, as long as it can carry the loaded cargo.
- the cart 1 may be, for example, a hand cart in which a hand handle is erected only on one side of the cargo bed 2 or a hand lift in which the cargo bed is raised or lowered by an operator's operation.
- the loading platform 2 is a rectangular plate that is divided into left and right and provided as a pair.
- the loading platform 2 may be a rectangular single plate provided on the entire surface.
- Wheel 4 is a free wheel that always faces the direction of travel when traveling. Instead of using all the wheels 4 as universal wheels, for example, a pair of wheels 4 that are separated from the assist unit 100 may be fixed wheels, and only a pair of wheels 4 that are close to the assist unit 100 may be universal wheels. By making the pair of wheels 4 away from the assist unit as fixed wheels in this way, the straight traveling performance of the carriage 1 is improved.
- a connecting member 5 for connecting the assist unit 100 is attached to the cart 1 at a standing portion 3 on one side of the loading platform 2.
- the connecting member 5 has a bracket 6 fixed to the standing portion 3 and a connecting rod 7 provided at the free end of the bracket 6.
- the bracket 6 is welded to the standing portion 3. Instead of welding, the bracket 6 may be attached by bolt fastening. When the bracket 6 is bolted to the standing portion 3, the connecting member 5 can be easily attached to the carriage 1. Further, since it is sufficient that the bracket 6 can be bolted, it is possible to connect the assist unit 100 by attaching the connecting member 5 to existing carts of various shapes.
- the connecting rod 7 is a cylindrical rod provided to protrude outward from the carriage 1 by the length of the bracket 6.
- the connecting rod 7 is provided perpendicular to the ground.
- the connecting rod 7 is connected to the carriage 1 via a bracket 6 between a position where an upper hook mechanism 11 described later is engaged and a position where the lower hook mechanism 12 is engaged.
- An assist unit 100 is attached to the connecting rod 7.
- the connecting rod 7 may be a solid round rod having a circular cross section instead of a cylindrical shape.
- the assist unit 100 assists the driving force applied to the carriage 1 by an operator.
- the assist unit 100 includes a unit main body 10 that is turnably connected to the carriage 1 and an operation handle as an operation unit that is pressed by an operator and can input a driving force to the carriage 1 through the unit main body 10. 20 and a drive wheel 30 provided on the unit main body 10 so as to be rotatable only in the front-rear direction and to which an assist force according to the operation of the operation handle 20 is applied.
- the unit body 10 is formed in a vertically long box shape and is supported by the drive wheels 30.
- the unit body 10 includes an upper hook mechanism 11 as an upper engagement mechanism that engages with the connecting rod 7 and a lower hook mechanism 12 as a lower engagement mechanism. Further, the unit body 10 is provided with auxiliary wheels 13 (see FIGS. 6 and 7) that are not grounded when the assist unit 100 is connected to the carriage 1.
- the upper hook mechanism 11 is manually engaged with the connecting rod 7 by the operator.
- the lower hook mechanism 12 can be engaged with the connecting rod 7 with one touch only by pressing the assist unit 100 against the carriage 1.
- the assist unit 100 is connected to the carriage 1 by the upper hook mechanism 11 and the lower hook mechanism 12 holding the connecting rod 7.
- the upper hook mechanism 11 and the lower hook mechanism 12 will be described in detail later with reference to FIGS.
- the auxiliary wheel 13 is a fixed wheel that is provided apart from the driving wheel 30 in the front-rear direction and is rotatable only in the same direction as the driving wheel 30.
- the auxiliary wheel 13 is used while being grounded when the assist unit 100 is detached from the carriage 1 and moved alone. Specifically, the worker tilts the assist unit 100 removed from the carriage 1 back and forth to ground the auxiliary wheel 13 and places the assist unit 100 in a state where the three wheels of the pair of driving wheels 30 and the auxiliary wheel 13 are grounded. Can be moved. Therefore, stable movement of the assist unit 100 alone is possible.
- a pair of auxiliary wheels 13 are provided.
- the three wheels are grounded, so that the assist unit 100 can be stably moved alone.
- the operation handle 20 is a handle provided in the unit main body 10 and pressed by an operator.
- the operation handle 20 is a bar that extends horizontally in the left-right direction of the unit body 10.
- the operation handle 20 is connected to the upper side of the unit main body 10 at the left and right. Thereby, the driving force input by the operator operating the operation handle 20 is transmitted to the carriage 1 via the unit body 10.
- the driving wheel 30 is provided so as not to be steered in the front-rear direction of the unit body 10.
- a pair of drive wheels 30 are provided on the left and right sides of the unit body 10 with a space therebetween.
- the drive wheels 30 are provided side by side on both sides of the turning center of the unit body 10.
- a pair of drive wheels 30 are provided, but instead, a single drive wheel 30 may be provided.
- the assist unit 100 includes a torque sensor 21 serving as a torque detection unit that detects a drive torque input from the operation handle 20, and an assist force according to the drive torque detected by the torque sensor 21.
- a torque sensor 21 serving as a torque detection unit that detects a drive torque input from the operation handle 20, and an assist force according to the drive torque detected by the torque sensor 21.
- the torque sensor 21, the controller 50, the battery 60, and the electric motor 40 are arranged in the unit main body 10 in the vertical order from the top. Thereby, the assist unit 100 can be made into a compact shape.
- a pair of torque sensors 21 are provided in the unit main body 10 to detect driving torque input to each of the left and right portions of the unit main body 10.
- the torque sensor 21 is electrically connected to the controller 50 and outputs an electrical signal corresponding to the detected driving torque to the controller 50.
- the torque sensor 21 connects the operation handle 20 and the unit main body 10 and is twisted by the driving force input from the operation handle 20 and transmits the driving force to the unit main body 10.
- a potentiometer (not shown) that outputs an electrical signal corresponding to the torsion is provided, and a drive torque is detected based on the torsion of the torsion bar.
- the electric motor 40 is electrically connected to the controller 50 and rotates according to an electric signal input from the controller 50.
- a pair of the electric motors 40 is provided and applies an assist force to each drive wheel 30 independently.
- the electric motor 40 is disposed such that its rotation axis is oriented in a direction perpendicular to the ground.
- the electric motor 40 is provided outside each of the pair of drive wheels 30. Thereby, the space
- a worm transmission 41 as a transmission that decelerates the rotation of the electric motor 40 and converts the rotation direction to transmit to the driving wheel 30.
- the controller 50 is mounted on the unit main body 10.
- the controller 50 controls the assist unit 100 and includes a CPU (Central Processing Unit), a ROM (Read Only Memory), a RAM (Random Access Memory), and an I / O interface (input / output interface). Consists of a microcomputer.
- the RAM stores data in the processing of the CPU
- the ROM stores a control program of the CPU in advance
- the I / O interface is used for input / output of information with the connected device.
- Control of the assist unit 100 is realized by operating a CPU, a RAM, and the like according to a program stored in the ROM.
- the controller 50 controls the left and right electric motors 40 according to the respective drive torques detected by the left and right torque sensors 21 and applies assist force to the left and right drive wheels 30. Specifically, the controller 50 controls the left electric motor 40 according to the driving torque detected by the left torque sensor 21, and the right electric motor according to the driving torque detected by the right torque sensor 21. 40 is controlled. As a result, an assist force for moving the assist unit 100 forward or backward as well as going straight, turning, or bending is applied.
- the battery 60 is mounted on the unit main body 10.
- the battery 60 is a battery that drives the controller 50 and supplies DC power to the electric motor 40 based on control by the controller 50.
- the upper hook mechanism 11 is provided above the lower hook mechanism 12.
- the upper hook mechanism 11 engages with the connecting rod 7 so as to be slidable in the axial direction.
- the upper hook mechanism 11 can be engaged with the carriage 1 via the connecting rod 7 when a pin 16 as a locking member is fitted by an operator.
- the upper hook mechanism 11 is fixed to the unit main body 10 and fixed to the side face of the connecting rod 7, and is provided to be rotatable with respect to the fixing portion 14. It has the movable part 15 fixed to the fixing
- the fixing portion 14 is a plate provided with a base end 14 a attached to the unit main body 10 and protruding from the unit main body 10.
- a pair of fixing portions 14 are provided in parallel in the vertical direction.
- a concave portion 14 c having an arc portion 14 d formed in a shape corresponding to the outer shape of the connecting rod 7 is formed at the free end 14 b of the fixed portion 14.
- the fixed portion 14 is formed at one end of the concave portion 14c and the through hole 14e to which the movable portion 15 is rotatably attached. It has a through hole 14f into which the pin 16 can be inserted while being held.
- the movable part 15 is a plate whose base end 15a is rotatably attached to the through hole 14e of the fixed part 14.
- the movable portion 15 is located between the pair of fixed portions 14.
- the movable portion 15 is formed so as to face the concave portion 14c of the fixed portion 14 in a state where the connecting rod 7 is sandwiched between the movable portion 15 and an arc portion formed in a shape corresponding to the outer shape of the connecting rod 7.
- a recess 15c having 15d is formed.
- a through hole 15f that is coaxial with the through hole 14e of the fixed portion 14 is formed in a state where the connecting rod 7 is sandwiched between the movable portion 15 and the fixed portion 14.
- the pin 16 has a shaft portion 16a that is inserted into the through hole 14f and the through hole 15f, and a head portion 16b that has a larger diameter than the shaft portion 16a.
- the shaft portion 16a is formed with a small diameter compared with the through hole 14f and the through hole 15f
- the head portion 16b is formed with a large diameter compared with the through hole 14f and the through hole 15f.
- the shaft 16 a is inserted through the pin 16 from above the through hole 14 f and the through hole 15 f in a state where the connecting rod 7 is sandwiched between the fixed part 14 and the movable part 15. Thereby, the movable part 15 is fixed to the fixed part 14 so as not to rotate.
- the pin 16 has an axial position defined by the head portion 16b coming into contact with the upper fixing portion 14.
- the lower hook mechanism 12 is provided below the upper hook mechanism 11.
- the lower hook mechanism 12 engages with the connecting rod 7 so as to be slidable in the axial direction.
- the lower hook mechanism 12 can be engaged with the carriage 1 via the connecting rod 7 by pressing the unit body 10 against the carriage 1.
- the lower hook mechanism 12 is fixed to the unit main body 10 and has a fixing portion 24 having a concave portion 24 c into which the connecting rod 7 enters, and the lower hook mechanism 12 rotates with respect to one end of the concave portion 24 c at the free end 24 b of the fixing portion 24.
- a first movable part 25 provided movably, a second movable part 26 provided rotatably with respect to the other end of the recess 24 c at the free end 24 b of the fixed part 24, and provided projecting outward from the unit body 10.
- a release lever 27 operated by an operator.
- the fixing portion 24 is a plate provided with a base end 24 a attached to the unit body 10 and protruding from the unit body 10.
- a pair of fixing portions 24 are provided in parallel in the vertical direction.
- a concave portion 24 c having an arc portion 24 d formed in a shape corresponding to the outer shape of the connecting rod 7 is formed at the free end 24 b of the fixed portion 24.
- the fixed portion 24 is formed at one end of the recess 24c and the through hole 24f to which the first movable portion 25 is rotatably attached, and the through hole formed at the other end of the recess 24c and to which the second movable portion 26 is rotatably attached. And a hole 24e.
- the first movable portion 25 is a plate that is rotatably attached to the through hole 24f of the fixed portion 24.
- the first movable part 25 is located between the pair of fixed parts 24.
- the first movable portion 25 rotates so that the connecting rod 7 is pushed by the connecting rod 7 when the connecting rod 7 enters the concave portion 24 c to close the concave portion 24 c and sandwich the connecting rod 7.
- the first movable portion 25 has an arc portion 25d formed in a shape corresponding to the outer shape of the connecting rod 7, and a concave portion 25c that comes into sliding contact with the connecting rod 7 when the connecting rod 7 enters the concave portion 24c; An engaging portion 25 a that engages with the two movable portions 26 is formed.
- the first movable portion 25 When the connecting rod 7 enters the recess 24c, the first movable portion 25 is pushed by the connecting rod 7 and rotates with the connecting rod 7 in contact with the recess 25c. Thereby, the recessed part 25c is located on the same axis as the recessed part 24c, and the connecting rod 7 is sandwiched between the fixed part 24 and the first movable part 25.
- the engaging portion 25a is in sliding contact with the clamping portion 26c of the second movable portion 26 when the first movable portion 25 rotates.
- the engaging portion 25a is locked by the engaging protrusion 26a of the second movable portion 26 in a state where the first movable portion 25 rotates and the concave portion 25c is positioned coaxially with the concave portion 24c. Thereby, the 1st movable part 25 is fixed so that rotation is impossible.
- the second movable portion 26 is a plate that is rotatably attached to the through hole 24e of the fixed portion 24.
- the second movable part 26 is located between the pair of fixed parts 24.
- the second movable portion 26 includes an engaging protrusion 26a that engages and fixes the first movable portion 25 in a state where the connecting rod 7 is held, and a holding portion 26c that holds the connecting rod 7 between the recessed portion 25c.
- the engaging protrusion 26a is pushed by the engaging portion 25a of the first movable portion 25 when the connecting rod 7 enters the recess 24c. And if the 2nd movable part 26 rotates, the engaging part 25a of the 1st movable part 25 will get over the engaging protrusion part 26a. Thereby, the engaging protrusion part 26a locks the engaging part 25a, and fixes the 1st movable part 25 (state shown in FIG. 11).
- the release lever 27 is provided integrally with the second movable portion 26.
- the release lever 27 is operated by an operator when releasing the engagement of the lower hook mechanism 12 with the connecting rod 7.
- the release lever 27 When the release lever 27 is operated in a direction away from the unit body 10 by the operator, the second movable portion 26 rotates integrally with the release lever 27, and the engagement protrusion 26a and the engagement portion 25a are engaged. The match is released. As a result, the fixing of the first movable portion 25 is released and the first movable portion 25 can be rotated, and the connecting rod 7 can be separated from the concave portion 24 c of the fixing portion 24.
- the assist unit 100 moves the carriage 1 straight forward.
- the driving force input to the unit main body 10 when the operation handle 20 is pressed is substantially the same at the left and right ends of the operation handle 20. Therefore, the drive torque detected by the left and right torque sensors 21 is substantially the same.
- the controller 50 commands the left and right electric motors 40 to apply the same assist force to the left and right drive wheels 30. Thereby, the same assist force is applied to the left and right drive wheels 30.
- the assist unit 100 can move the cart 1 straight forward by applying the assist force of the electric motor 40 to the driving force applied by the operator while turning in the same direction without turning with respect to the cart 1. it can.
- the assist unit 100 turns left or right. At this time, the assist force applied to the left and right drive wheels 30 differs between the left and right electric motors 40.
- the drive torque detected by the right torque sensor 21 is larger than the drive torque detected by the left torque sensor 21.
- the controller 50 commands the assist force applied from the right electric motor 40 to the drive wheels 30 to be larger than the assist force applied from the left electric motor 40 to the drive wheels 30. As a result, the assist force applied to the right drive wheel 30 is greater than the assist force applied to the left drive wheel 30.
- the assist unit 100 is turned with respect to the carriage 1.
- the assist unit 100 can give not only an assist force for moving the carriage 1 forward or backward, but also a moment for turning the carriage 1. Therefore, the assist unit 100 can turn the carriage 1 by applying the assist force of the electric motor 40 to the drive force applied by the operator.
- the unit body 10 is connected to the carriage 1 so as to be turnable.
- the drive wheels 30 are provided in the unit body 10 so as to be rotatable only in the front-rear direction. Therefore, since the drive wheel 30 does not turn with respect to the unit body 10, a mechanism for turning the drive wheel 30 is unnecessary. Therefore, the structure of the assist unit 100 of the cart 1 can be simplified.
- the cart 1 can be moved by applying an assist force from the assist unit 100 based on the operation of the operator.
- the cart 1 can be moved only by the driving force of the operator without applying the assist force from the assist unit 100.
- the magnitude of the assist force can be controlled according to the force with which the operator presses the operation handle 20.
- the concave portion 25c of the first movable portion 25 and the concave portion 24c of the fixed portion 24 are positioned coaxially.
- the first movable part 25 rotates until it is done.
- the engaging portion 25 a of the first movable portion 25 is in sliding contact with the clamping portion 26 c of the second movable portion 26.
- fixed part 24 become coaxial.
- the first movable part 25 is fixed to the fixing part 24 so as not to be rotatable by the engaging part 25a being locked to the engaging protrusion part 26a.
- the lower hook mechanism 12 can be engaged with the connecting rod 7 with one touch only by pressing the unit main body 10 of the assist unit 100 against the carriage 1. Therefore, the assist unit 100 and the carriage 1 can be easily connected.
- the operator rotates the movable portion 15 of the upper hook mechanism 11 to sandwich the connecting rod 7 between the movable portion 15 and the fixed portion 14. Then, the pin 16 is inserted into the through hole 14f and the through hole 15f located on the same axis from above. Thereby, the movable part 15 is fixed to the fixed part 14 so as not to rotate, and the upper hook mechanism 11 is engaged with the connecting rod 7.
- the upper hook mechanism 11 is provided above the lower hook mechanism 12 and is located at a relatively high position, so that the operator can easily fit the pin 16. Therefore, the assist unit 100 and the cart 1 can be easily connected.
- the assist unit 100 can be reliably connected to the carriage 1.
- the upper hook mechanism 11 is provided above the lower hook mechanism 12 and is located at a relatively high position, so that the operator can easily pull out the pin 16. Therefore, the assist unit 100 can be easily detached from the carriage 1.
- the operator operates the release lever 27 of the lower hook mechanism 12 in the direction away from the unit body 10 after the engagement of the upper hook mechanism 11 with the connecting rod 7 is released. Then, the 2nd movable part 26 rotates integrally with the cancellation
- the lower hook mechanism 12 is released from engagement with the connecting rod 7 only by the operator operating the release lever 27. Therefore, the assist unit 100 can be easily detached from the carriage 1.
- the lower hook mechanism 12 When the unit body 10 of the assist unit 100 is pressed against the carriage 1, the lower hook mechanism 12 is engaged with the carriage 1 via the connecting rod 7. Then, when the pin 16 of the upper hook mechanism 11 is fitted by the operator, the upper hook mechanism 11 is engaged with the carriage 1 via the connecting rod 7.
- the upper hook mechanism 11 is provided above the lower hook mechanism 12 and is located at a relatively high position. Therefore, the operation for fitting the pin 16 by the operator is easy. Therefore, the assist unit 100 and the carriage 1 can be easily connected.
- the assist unit 100 can be reliably connected to the carriage 1.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Handcart (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
Claims (5)
- 作業者によって台車に付与される駆動力をアシストする台車の駆動アシストユニットであって、
前記台車に対して旋回可能に連結されるユニット本体と、
前記ユニット本体に設けられ、作業者によって押圧操作されて、前記ユニット本体を介して前記台車に駆動力を入力可能な操作部と、
前記ユニット本体の前後方向に回転可能に設けられ、前記操作部の操作に応じたアシスト力が付与される駆動輪と、
前記ユニット本体を前記台車に押し当てることによって前記台車に係合可能な下部係合機構と、
前記下部係合機構の上方に設けられ、作業者によって係止部材が嵌められることによって前記台車に係合可能な上部係合機構と、を備える台車の駆動アシストユニット。 - 請求項1に記載の台車の駆動アシストユニットであって、
前記台車には、地面に対して垂直な連結棒が外部に突出するように取り付けられ、
前記上部係合機構及び前記下部係合機構は、前記連結棒を介して前記台車に係合する台車の駆動アシストユニット。 - 請求項2に記載の台車の駆動アシストユニットであって、
前記上部係合機構は、
前記ユニット本体に固定され、前記連結棒の側面に当接する固定部と、
前記固定部に対して回動自在に設けられ、前記連結棒を前記固定部との間で挟持した状態で前記係止部材が嵌められることによって前記固定部に固定される可動部と、を有する台車の駆動アシストユニット。 - 請求項2に記載の台車の駆動アシストユニットであって、
前記下部係合機構は、
前記ユニット本体に固定され、前記連結棒が進入する凹部を有する固定部と、
前記固定部の前記凹部の一端に対して回動自在に設けられ、前記連結棒が前記凹部に進入する際に前記連結棒に押されて前記凹部を閉塞して前記連結棒を挟持するように回動する第一可動部と、
前記固定部における前記凹部の他端に対して回動自在に設けられ、前記連結棒を挟持した状態で前記第一可動部に係合して固定する第二可動部と、を有する台車の駆動アシストユニット。 - 請求項4に記載の台車の駆動アシストユニットであって、
前記下部係合機構は、前記ユニット本体から外側に突出して設けられ作業者によって操作されると前記第二可動部と一体に回動して前記第一可動部の固定を解除可能な解除レバーを更に有する台車の駆動アシストユニット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201480016418.XA CN105189250B (zh) | 2013-03-26 | 2014-03-26 | 台车的驱动辅助单元 |
| US14/779,327 US9849900B2 (en) | 2013-03-26 | 2014-03-26 | Driving assist unit of truck |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013064460A JP5998091B2 (ja) | 2013-03-26 | 2013-03-26 | 台車の駆動アシストユニット |
| JP2013-064460 | 2013-03-26 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014157308A1 true WO2014157308A1 (ja) | 2014-10-02 |
Family
ID=51624271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/058464 WO2014157308A1 (ja) | 2013-03-26 | 2014-03-26 | 台車の駆動アシストユニット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9849900B2 (ja) |
| JP (1) | JP5998091B2 (ja) |
| CN (1) | CN105189250B (ja) |
| WO (1) | WO2014157308A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107635849A (zh) * | 2015-09-11 | 2018-01-26 | 康贝株式会社 | 婴儿车 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016117420A (ja) * | 2014-12-22 | 2016-06-30 | 株式会社椿本チエイン | 運搬台車 |
| US9956976B1 (en) * | 2015-09-30 | 2018-05-01 | Jason K. Akre | Multi-purpose all-terrain cart |
| US12065005B2 (en) * | 2020-10-29 | 2024-08-20 | Bosch Automative Service Solutions Inc. | Vehicle service cart with external tow features |
| CN115027596B (zh) * | 2022-04-19 | 2023-10-24 | 国网江苏省电力有限公司连云港供电分公司 | 一种基于人工智能防侧倾的重物自动搬运装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS438574Y1 (ja) * | 1964-05-29 | 1968-04-16 | ||
| JPS61181770A (ja) * | 1985-01-18 | 1986-08-14 | 株式会社日立ビルシステムサービス | エスカレ−タ−用運搬台車 |
| JPS63159373U (ja) * | 1987-04-08 | 1988-10-19 | ||
| JP2008280021A (ja) * | 2007-05-09 | 2008-11-20 | Meiden Eco Drive Kk | 電動アシスト式駆動輪と台車の連結構造 |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2904348A (en) * | 1958-01-17 | 1959-09-15 | Omer M Quastad | Tractor hitch |
| JPH0180570U (ja) * | 1987-11-20 | 1989-05-30 | ||
| JP2837724B2 (ja) * | 1990-01-30 | 1998-12-16 | 株式会社ブリヂストン | 台車の連結構造 |
| US5309289A (en) * | 1991-03-11 | 1994-05-03 | Johnson Brady G | Optical target system for trailer hitch alignment |
| US5651422A (en) * | 1994-04-22 | 1997-07-29 | The Center For Innovative Technology | Universal-fit, quick-connect power drive/steer attachment for wheelchair |
| US5860659A (en) * | 1995-01-10 | 1999-01-19 | Hart; Michael Edward | Carrier for holding and transporting containers |
| US5899284A (en) * | 1995-01-26 | 1999-05-04 | Sun Mountain Sports, Inc. | Powered cart for golf bag |
| JP3032698B2 (ja) * | 1995-04-14 | 2000-04-17 | 松下電工株式会社 | パワーアシスト付運搬車 |
| DE19641403A1 (de) * | 1996-05-24 | 1997-02-20 | Stoecklin Logistik Ag | Rangierwagen mit Schwenkkupplung |
| US7150465B2 (en) * | 2003-05-07 | 2006-12-19 | Darling Iii Charles W | Mission adaptable portable cart/utility table arrangement |
| CA2408087A1 (en) * | 2000-05-11 | 2001-11-15 | Hill-Rom Services, Inc. | Motorized propulsion system for a bed |
| WO2003034970A1 (en) * | 2001-10-26 | 2003-05-01 | Daniel Johnson | Hospital bed power-assist |
| SE525130C2 (sv) * | 2003-01-31 | 2004-12-07 | Bt Ind Ab | Ledarmstruck med kraftöverförande organ och koppling för överförande av en pumpande ledarmsrörelse till en drivrörelse för styrhjulen |
| US7124859B2 (en) * | 2003-04-25 | 2006-10-24 | Snap-On Incorporated | Manually actuated brake system for manually towable vehicle |
| JP2004359008A (ja) * | 2003-06-02 | 2004-12-24 | Sony Corp | 搬送車両及びその制御方法 |
| CA2447019A1 (en) * | 2003-10-27 | 2005-04-27 | Alistair Jenkins | Motorized towing apparatus |
| TWM257672U (en) * | 2004-06-29 | 2005-03-01 | Syndica Technologies Internat | Bicycle storage compartment and similar article |
| US7063347B1 (en) * | 2004-10-22 | 2006-06-20 | David Wu | Main shaft and bottom bracket mounting arrangement for golf cart |
| US20070289787A1 (en) * | 2005-02-25 | 2007-12-20 | Dane Industries, Inc. | Wheelchair transporter |
| US20060243500A1 (en) * | 2005-02-25 | 2006-11-02 | Wiff James W | Wheelchair transporter |
| US20060220334A1 (en) * | 2005-03-29 | 2006-10-05 | Liao Li W | Article carrying cart |
| US7338054B2 (en) * | 2005-04-18 | 2008-03-04 | Pint Eliana M | Self-contained utility cart |
| JP2008126900A (ja) * | 2006-11-22 | 2008-06-05 | Miura Co Ltd | 電動台車 |
| US7878277B2 (en) * | 2007-03-23 | 2011-02-01 | Assembled Products Corporation | Motorized wheeled vehicle caddy |
| US20080238011A1 (en) * | 2007-03-29 | 2008-10-02 | Howard Hammel | Mobile article transporter |
| US20090038864A1 (en) * | 2007-08-07 | 2009-02-12 | Sung Yol Yun | Remotely controllable golf cart and method for steering a cart |
| US7712558B2 (en) * | 2007-09-06 | 2010-05-11 | Mh Logistics Corp. | Rolltainer transporter |
| CA2674932A1 (en) * | 2008-04-11 | 2009-10-11 | Dane Technologies, Inc. | Cart transporting apparatus |
| US20100078233A1 (en) * | 2008-09-29 | 2010-04-01 | Clarence Edgar Fletcher | Conveyance apparatus |
| US8833777B2 (en) * | 2010-02-05 | 2014-09-16 | Michael Hughesdon Turner | Combination scooter and messenger bag |
| US20110297465A1 (en) * | 2010-04-08 | 2011-12-08 | Huntley Paul N | Retrofit Assembly for Self-Mobilization of a Transport Unit |
| US8165718B2 (en) * | 2010-07-30 | 2012-04-24 | Toyota Motor Engineering & Manufacturing North America, Inc. | Robotic transportation devices and systems |
| US8505932B1 (en) * | 2010-09-10 | 2013-08-13 | Dennis J. Piccirillo | Bicycle hauler |
| WO2012154872A2 (en) * | 2011-05-10 | 2012-11-15 | Gatekeeper Systems, Inc. | Cart connection assemblies and methods |
| US9358997B2 (en) * | 2012-02-29 | 2016-06-07 | Rwgco, Llc | Apparatus and method for efficiently transporting various articles |
| US8360460B1 (en) * | 2012-07-03 | 2013-01-29 | Charles Dwight Jarvis | Floating hitching system |
| US9259369B2 (en) * | 2012-09-18 | 2016-02-16 | Stryker Corporation | Powered patient support apparatus |
-
2013
- 2013-03-26 JP JP2013064460A patent/JP5998091B2/ja not_active Expired - Fee Related
-
2014
- 2014-03-26 WO PCT/JP2014/058464 patent/WO2014157308A1/ja active Application Filing
- 2014-03-26 US US14/779,327 patent/US9849900B2/en not_active Expired - Fee Related
- 2014-03-26 CN CN201480016418.XA patent/CN105189250B/zh not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS438574Y1 (ja) * | 1964-05-29 | 1968-04-16 | ||
| JPS61181770A (ja) * | 1985-01-18 | 1986-08-14 | 株式会社日立ビルシステムサービス | エスカレ−タ−用運搬台車 |
| JPS63159373U (ja) * | 1987-04-08 | 1988-10-19 | ||
| JP2008280021A (ja) * | 2007-05-09 | 2008-11-20 | Meiden Eco Drive Kk | 電動アシスト式駆動輪と台車の連結構造 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107635849A (zh) * | 2015-09-11 | 2018-01-26 | 康贝株式会社 | 婴儿车 |
| CN107635849B (zh) * | 2015-09-11 | 2019-11-01 | 康贝株式会社 | 婴儿车 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2014189072A (ja) | 2014-10-06 |
| CN105189250B (zh) | 2017-07-28 |
| JP5998091B2 (ja) | 2016-09-28 |
| CN105189250A (zh) | 2015-12-23 |
| US20160039444A1 (en) | 2016-02-11 |
| US9849900B2 (en) | 2017-12-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2014157308A1 (ja) | 台車の駆動アシストユニット | |
| WO2014157307A1 (ja) | 台車の駆動アシストユニット | |
| WO2014157309A1 (ja) | 台車の駆動アシストユニット | |
| JP2008126900A (ja) | 電動台車 | |
| JP2012148611A (ja) | 電動アシスト台車及び台車の電動アシストユニット | |
| JP2006290319A (ja) | 電動アシスト手押し台車 | |
| JP5429794B2 (ja) | アシストモータ付き走行車両 | |
| JP4471744B2 (ja) | ベッド電動搬送装置及びその駆動制御方法 | |
| WO2006025245A1 (ja) | ハンドル接続構造 | |
| JP2009012510A (ja) | 台車 | |
| JP6552438B2 (ja) | 台車 | |
| JP2004074875A (ja) | 電動台車 | |
| JP2023518605A (ja) | ハンドルバー折り畳み装置を有する、移動体のための取り外し可能な電気推進システム | |
| JP2012201245A (ja) | 電動アシストリヤカー | |
| JP5719605B2 (ja) | 電動アシスト台車 | |
| JP7410151B2 (ja) | 移動体、特にベッドのための着脱可能な電気推進システム | |
| JP6792109B2 (ja) | 音声警報付き台車 | |
| JP2015009601A (ja) | 手押し運搬車 | |
| JP2009154683A (ja) | 連結具付き台車牽引用電動三輪車及び台車牽引用連結具 | |
| JP3674913B2 (ja) | ローリフトトラック | |
| JP3674912B2 (ja) | ローリフトトラック | |
| JP7507936B1 (ja) | 台車の牽引車 | |
| JP2004074997A (ja) | 台車 | |
| JP2005178505A (ja) | かご台車用補助車両 | |
| JP2012171374A (ja) | 電動アシスト台車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201480016418.X Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14774193 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14779327 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14774193 Country of ref document: EP Kind code of ref document: A1 |