WO2014108987A1 - 車両用表示制御装置及び車両用表示制御方法 - Google Patents
車両用表示制御装置及び車両用表示制御方法 Download PDFInfo
- Publication number
- WO2014108987A1 WO2014108987A1 PCT/JP2013/007703 JP2013007703W WO2014108987A1 WO 2014108987 A1 WO2014108987 A1 WO 2014108987A1 JP 2013007703 W JP2013007703 W JP 2013007703W WO 2014108987 A1 WO2014108987 A1 WO 2014108987A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- display
- image
- vehicle
- control
- driving support
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 7
- 230000000694 effects Effects 0.000 claims description 334
- 238000001514 detection method Methods 0.000 claims description 18
- 230000008859 change Effects 0.000 claims description 14
- 230000007423 decrease Effects 0.000 claims description 4
- 239000004973 liquid crystal related substance Substances 0.000 abstract description 94
- 238000012545 processing Methods 0.000 description 179
- 238000004891 communication Methods 0.000 description 72
- 238000003860 storage Methods 0.000 description 58
- 238000005259 measurement Methods 0.000 description 31
- 238000010586 diagram Methods 0.000 description 24
- 230000033001 locomotion Effects 0.000 description 17
- 238000006243 chemical reaction Methods 0.000 description 14
- 239000012530 fluid Substances 0.000 description 10
- 230000004044 response Effects 0.000 description 10
- 230000002093 peripheral effect Effects 0.000 description 9
- 230000000007 visual effect Effects 0.000 description 9
- 230000004397 blinking Effects 0.000 description 8
- 230000000994 depressogenic effect Effects 0.000 description 6
- 239000000446 fuel Substances 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 230000007935 neutral effect Effects 0.000 description 5
- 101150082269 TSHB gene Proteins 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 4
- 239000000498 cooling water Substances 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000005043 peripheral vision Effects 0.000 description 3
- 230000006399 behavior Effects 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000009194 climbing Effects 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 238000006557 surface reaction Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/029—Steering assistants using warnings or proposing actions to the driver without influencing the steering system
- B62D15/0295—Steering assistants using warnings or proposing actions to the driver without influencing the steering system by overlaying a vehicle path based on present steering angle over an image without processing that image
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/10—Input arrangements, i.e. from user to vehicle, associated with vehicle functions or specially adapted therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/215—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays characterised by the combination of multiple visual outputs, e.g. combined instruments with analogue meters and additional displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/22—Display screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/60—Instruments characterised by their location or relative disposition in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
- B60K35/81—Arrangements for controlling instruments for controlling displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/166—Navigation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/167—Vehicle dynamics information
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/171—Vehicle or relevant part thereof displayed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/172—Driving mode indication
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K37/00—Dashboards
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/02—Control of vehicle driving stability
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/114—Yaw movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D7/00—Indicating measured values
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G2380/00—Specific applications
- G09G2380/10—Automotive applications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
- G09G5/02—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators characterised by the way in which colour is displayed
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09G—ARRANGEMENTS OR CIRCUITS FOR CONTROL OF INDICATING DEVICES USING STATIC MEANS TO PRESENT VARIABLE INFORMATION
- G09G5/00—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators
- G09G5/36—Control arrangements or circuits for visual indicators common to cathode-ray tube indicators and other visual indicators characterised by the display of a graphic pattern, e.g. using an all-points-addressable [APA] memory
Definitions
- the present invention relates to a vehicle display control device and a vehicle display control method for performing display control of operation state information of driving support control of a vehicle with respect to a display device provided in a meter panel of a vehicle-mounted meter device.
- Patent Document 1 there is a technology disclosed in Patent Document 1 as an information display technology for vehicle braking / driving control for a display device provided in a meter panel of an on-vehicle meter device.
- the wheel control state display device of Patent Literature 1 includes braking / driving force control means for detecting a vehicle state and adjusting braking force or driving force of a plurality of wheels attached to the vehicle based on the detection result. And the wheel which is adjusting braking force or driving force by the braking / driving force control means is displayed by an indicator installed on the instrument panel.
- the information is obtained by controlling the lighting of the four lamps of the indicator composed of the vehicle outer shape part imitating the shape of the vehicle and the four lamps respectively corresponding to the wheel positions in the vehicle outer shape part. it's shown. That is, the driver is informed of the wheel that is adjusting the braking force or driving force by lighting or blinking the lamp at the corresponding position. Therefore, in order to recognize the wheel which is adjusting the braking force or the driving force, the driver needs to visually recognize which tire position lamp is lit. Therefore, for example, in a situation where the driving load is high such as traveling on a curved road, the recognizability of the display information may be deteriorated.
- an object of the present invention is to display information that is relatively good in recognition of information related to driving support control and is not troublesome for the driver even in a situation where the driving load is relatively large. It is said.
- an embodiment of the present invention provides a support state display image, which is an image in which a vehicle image is superimposed on a background image that is a planar image of a predetermined shape, in a meter panel of an in-vehicle meter device. Is displayed on a display device provided in.
- the display mode of the background image portion of the support state display image displayed on the display device is changed to a preset display mode. Display control was performed.
- the driver is informed that the driving support device is operating mainly by changing the display mode of the background image portion. That is, the display mode of the image of the background part is changed instead of the fine part part corresponding to the control of the vehicle image part. Therefore, the driver can grasp the change in the display content by instantaneous line-of-sight movement and peripheral visual field without paying attention to the display content. As a result, even when the driving load is high, it is possible to accurately notify the driver that the driving support control is operating without making the driver feel bothered.
- FIG. 2 is a block diagram illustrating a configuration example of a meter device 20.
- FIG. 2 is a diagram illustrating an example of an external configuration of a meter device 20.
- FIG. 3 is a block diagram illustrating an example of a specific configuration of a display control controller 30.
- FIG. It is a figure which shows an example of the display screen of the liquid crystal display device 26, and an example of a default image.
- (A) And (b) is a figure which shows an example of a display image at the time of control intervention.
- FIG. 7 is a diagram illustrating an example of a scene-specific effect image.
- FIG. 1 It is a figure which shows an example of the production image 261ARC which is an ARC support state display image.
- A)-(d) is a figure which shows an example of the production image SMB which is the support state display image for SMB.
- A) And (b) is a figure which shows an example of the production image 261HSA which is a support state display image for HSA.
- FIG. 1 is a conceptual diagram showing a model of an automobile V to which the vehicle display control apparatus according to this embodiment is applied.
- the automobile V of this embodiment is equipped with an SBW (steer-by-wire) system.
- SBW steer-by-wire
- the automobile V includes a steering wheel 1 that can be steered by a driver, left and right front wheels (steered wheels) 11 ⁇ / b> R and 11 ⁇ / b> L, and a steering shaft 2.
- the steering wheel 1 is provided so as to be mechanically separable from the left and right front wheels 11R and 11L.
- the steering wheel 1 is connected to the steering shaft 2.
- the automobile V further includes a steering angle sensor 3, a reaction force motor 4, and a steering torque sensor 5.
- the steering angle sensor 3, the reaction force motor 4, and the steering torque sensor 5 are provided on the steering shaft 2.
- the steering angle sensor 3 detects the steering angle ⁇ s of the steering wheel 1 and is composed of an encoder or the like.
- the reaction force motor 4 is for applying a steering reaction force to the steering wheel 1 by applying a torque to the steering shaft 2.
- the steering reaction force is a reaction force acting in a direction opposite to the operation direction in which the driver steers the steering wheel 1.
- the reaction force motor 4 is constituted by a brushless motor or the like, and is driven according to a reaction force motor drive current output from an SBW controller 80 described later.
- the steering torque sensor 5 detects the steering torque T transmitted from the steering wheel 1 to the steering wheel 2.
- the steering torque sensor 5 is configured to detect the steering torque T by detecting the torsional angular displacement of the torsion bar with a potentiometer.
- the automobile V further includes a clutch 6, a pinion shaft 7, a steering motor 8, a steering motor angle sensor 9, a pinion gear 12, a rack shaft 13, a tie rod 14, a knuckle arm 15, and an SBW controller. 80.
- the clutch 6 is interposed between the steering wheel 1 and the steered wheels 11R and 11L, and is switched to a released state or an engaged state in accordance with a clutch command (clutch command current) from the SBW controller 80.
- the clutch 6 is in a released state in a normal state, and is in an engaged state when some abnormality (for example, abnormality in the steering reaction force system) occurs in the SBW system.
- steering assist control hereinafter referred to as EPS control
- EPS control steering assist control for applying a steering assist force for reducing the driver's steering burden to the steering system is performed.
- the clutch 6 is also in the engaged state when the driver is in the end contact state where the driver steers the steering wheel 1 to the vicinity of the cut limit.
- end contact control for giving the driver a feeling of end contact is performed.
- the torque transmission path between the steering wheel 1 and the steered wheels 11R and 11L is mechanically separated, so that the steering operation of the steering wheel 1 is not transmitted to the steered wheels 11R and 11L.
- the clutch 6 is engaged, the torque transmission path between the steering wheel 1 and the steered wheels 11R and 11L is mechanically coupled, so that the steering operation of the steering wheel 1 is transmitted to the steered wheels 11R and 11L.
- the pinion shaft 7 has one end connected to the clutch 6 and the other end provided with a pinion gear 12.
- the pinion gear 12 meshes with a rack gear provided between both end portions of the rack shaft 13.
- Both ends of the rack shaft 13 are connected to the steered wheels 11R and 11L via tie rods 14 and knuckle arms 15, respectively. That is, the steered wheels 11R and 11L are steered via the tie rod 14 and the knuckle arm 15 by changing the rack shaft 13 in the vehicle width direction according to the rotation of the pinion gear 12, and the traveling direction of the vehicle V is changed. It is possible.
- the steering motor 8 is configured by a brushless motor or the like, similarly to the reaction force motor 4, and is driven according to the steering motor drive current output by the SBW controller 80.
- the steered motor 8 is driven according to the steered motor drive current to output steered torque for steered steered wheels 11R and 11L.
- a steered output gear 8 a formed using a pinion gear 12 is provided on the output shaft tip side of the steered motor 8.
- the steered output gear 8 a meshes with a rack gear provided between both end portions of the rack shaft 13. That is, the steered wheels 11R and 11L can be steered according to the rotation of the steered output gear 8a.
- the steered motor 8 is provided with a steered motor angle sensor 9.
- the steered motor angle sensor 9 detects the rotation angle of the steered motor 8.
- the turning angle ⁇ r of the steered wheels 11R and 11L is uniquely determined by the rotation angle of the steered output gear 8a and the gear ratio between the rack gear of the rack shaft 13 and the steered output gear 8a. Therefore, in the present embodiment, the turning angle ⁇ r of the steered wheels 11R and 11L is obtained from the rotation angle of the steered motor 8.
- the SBW controller 80 inputs the steering angle ⁇ s of the steering wheel 1 detected by the steering angle sensor 3, the steering torque T detected by the steering torque sensor 5, and the turning angle ⁇ r detected by the turning motor angle sensor 9. .
- the SBW controller 80 receives the vehicle speed Vd and the yaw rate ⁇ from a controller (not shown) of another system.
- the SBW controller 80 drives and controls the steered motor 8 according to the steering state of the steering wheel 1 to steer the steered wheels 11R and 11L.
- the turning angle ⁇ r of the steered wheels 11R and 11L coincides with the turning command angle according to the steering state.
- the SBW controller 80 drives and controls the reaction force motor 6 according to the steered state of the steered wheels 11R and 11L, and applies a steering reaction force to the steering wheel 1.
- a steering reaction force simulating a road surface reaction force is applied to the steering wheel 1.
- SBW control steer-by-wire control
- the SBW controller 80 turns the steering angle so as to fix the turning angle at a predetermined turning angle as end contact control for giving the driver a feeling of end contact.
- Angle fixed control is performed.
- the predetermined turning angle is, for example, a rack end angle.
- the end contact control is ended at the timing when the driver performs the switchback operation of the steering wheel 1.
- the normal SBW control is resumed.
- the automobile V further includes a meter device 20, a display control controller 30, a driving support device 40, and a communication network 50. Furthermore, the automobile V includes a brake pedal 16 that can be depressed by the driver, and a brake operation detection device 17 that detects a depression amount Bd of the brake pedal 16.
- the driving support device 40 includes a plurality of control systems (not shown) that perform various driving support controls.
- the driving support device 40 performs various driving support controls by controlling the braking / driving force of the automobile 1, controlling the gear ratio of the transmission (CVT), and controlling the SBW system.
- the driving support device 40 generates an operation flag indicating the operating state of various driving support controls, and transmits the generated operation flag to the display controller 30 via the communication network 50.
- the operation flag is set for each type of driving support control.
- Each operation flag is a flag that is ON (signal is high level) during operation of the driving support control and is OFF (signal is low level) during the non-operation of the driving support control.
- the driving support device 40 performs the following driving support control (1) to (6).
- driving support control (1) to (6).
- the present invention is not limited to the following six types (1) to (6), and other driving support control such as inter-vehicle maintenance control may be implemented.
- ATC Active Trace Control
- AEB Active Engine Brake
- ARC Active Ride Control
- HSA Hill Start Assist
- HDC Hill Descent Control
- SMB Side Magic Bumper
- the ATC provides brake and engine output to each wheel so as to reduce the delay of the yaw rate of the vehicle V with respect to the steering in accordance with the steering state of the driver and the turning state of the vehicle V detected based on a plurality of sensor detection values.
- AEB travels on a curved road such as a corner by adding a deceleration by controlling the gear ratio of the transmission according to the steering state of the driver and the driving state of the vehicle V detected based on a plurality of sensor detection values.
- This is driving support control that reduces the driving load of the driver.
- ARC is driving support control that improves the convergence of the movement of the shed after overcoming the unevenness that is a relatively large input of the vehicle V by brake control.
- the HSA is driving support control that prevents the vehicle V from moving backward when switching from the brake pedal to the accelerator pedal by holding the brake pressure for several seconds (for example, about 2 seconds) when starting on a slope.
- the HDC has a constant vehicle speed (set at 4 [km / h] to 15 [km / h]) on a steep downhill that cannot be decelerated by engine braking alone or on a slippery road such as a snowy road.
- This is driving support control that performs braking / driving control so that it can be lowered.
- SMB is driving support control that improves running stability with respect to the steering angle of the vehicle V.
- the SMB recognizes the lane of the road ahead by an in-vehicle camera (not shown) installed on the upper part of the rear mirror of the automobile V so that the travel line can be accurately traced with a small steering angle correction.
- the SBW system is controlled, the tire angle is corrected so as to reduce the deviation, and a reaction force is applied to the steering. . Since SMB can reduce the change even if the course of the car changes due to, for example, a crosswind or a saddle, it is possible to suppress the driver's correction rudder.
- the driving support device 40 generates an operation flag corresponding to each of the driving support controls (1) to (6), and transmits the generated operation flag to the display controller 30 via the communication network 50.
- the operation flag SMB indicating the operation state of the SMB
- the operation flag ATC indicating the operation state of the ATC
- the operation flag AEB indicating the operation state of the AEB
- the operation state of the HSA are illustrated.
- An operation flag HSA, an operation flag HDC indicating the operation state of the HDC, and an operation flag ARC indicating the operation state of the ARC are generated.
- the generated operation flags SMB, ATC, AEB, HSA, HDC and ARC are transmitted to the display controller 30 via the communication network 50.
- the communication network 50 is a network that adopts a CAN (Controller Area Network) communication protocol in this embodiment.
- CAN communication protocol various controllers are connected in a line-type connection configuration, and data communication is performed by multi-master bus access.
- LIN local
- FlexRay FlexRay
- the SBW system employs the FlexRay communication protocol.
- the brake operation detection device 17 supplies the detected brake pedal operation amount to a VDC system (not shown) that is one of the control systems provided in the driving support device 40.
- the VDC system is a system that performs braking / driving control (stability control) for improving the stability of the vehicle V by sensing the side slip of the front and rear wheels and controlling the braking force and engine output of each wheel. It is.
- the VDC system generates BHS (Brake Hold State) information indicating the depression state of the brake pedal 16 of the driver based on the supplied brake pedal operation amount. Then, the generated BHS information is supplied to the display controller 30 via the communication network 50.
- the BHS information may be obtained from another system.
- FIG. 2 is a block diagram illustrating a configuration example of the meter device 20.
- FIG. 3 is a diagram illustrating an example of an external configuration of the meter device 20.
- the meter device 20 includes a first meter 22, a second meter 24, a liquid crystal display device 26, a meter controller 28, and an effect image storage memory 29.
- the first meter 22 includes a tachometer 22a that displays the engine speed of the automobile V in a meter and a fail gauge 22b that displays the remaining amount of fuel in the automobile V in a meter.
- the tachometer 22a is a mechanical meter that displays the engine rotational speed in an analog manner based on information on the engine rotational speed from the meter controller 28 by using a memory, a dial with a numerical value, and a pointer.
- the fail gauge 22b is a mechanical meter that displays the remaining amount of fuel in an analog manner using a dial with a memory, an alphabet (F, E) and a pointer based on the remaining amount of fuel information from the meter controller 28. is there.
- the second meter 24 displays a speed meter 24a that displays the vehicle speed of the vehicle V, an indicator 24b that displays a warning display, an operation state of driving support control, and the like, and a temperature of cooling water of the engine of the vehicle V.
- the speed meter 24a is a mechanical meter that displays the speed of the vehicle V in an analog manner using a memory, a dial with a numerical value, and a pointer based on the speed information of the vehicle V from the meter controller 28.
- the indicator 24b turns off the indicator lamps of symbols prepared in advance according to each state in response to a display command based on information indicating the seat belt wearing state, information indicating the door open / closed state, etc. from the meter controller 28. Turn on or flash. Further, the indicator 24b turns off, lights up, or blinks the HSA indicator lamp in response to a display start command of the HSA indicator lamp included in the HSA effect display command described later from the meter controller 28.
- the water temperature meter 24c is a mechanical meter that displays the temperature of the cooling water in an analog manner based on the information on the temperature of the cooling water from the meter controller 28 by using a dial with a memory, alphabet (H, C) and a pointer. is there.
- the liquid crystal display device 26 is composed of a TFT (Thin Film Transistor) liquid crystal display device.
- the liquid crystal display device 26 displays the operating states of various driving support controls performed by the driving support device 40 based on the image display signal from the meter control controller 28 received via the communication network 50 and the meter control controller 28.
- An image for informing the user (hereinafter referred to as a support status display image) is displayed.
- the liquid crystal display device 26 is not limited to a TFT liquid crystal display device, and may be a plasma display device, a field emission display device, an organic EL display as long as the display device has a visibility comparable to or higher than that of a TFT liquid crystal display device. You may comprise from other display apparatuses, such as an apparatus. Details of the support state display images for the six types of driving support control (1) to (6) described above will be described later.
- the meter control controller 28 receives information sent via the communication network 50 from various on-vehicle control controllers (ECUs). Specifically, the meter controller 28 sends a display start command (described later) and a display end command (described later) of the support state display image and the HSA indicator lamp sent from the display controller 30 via the communication network 50. Receive. Further, information on the engine speed, the vehicle speed and the cooling water temperature sent from the engine controller (not shown), and the remaining fuel information sent from the fuel controller (not shown) are transmitted via the communication network 50. Receive. In addition, the meter controller 28 receives information related to the display of the indicator lamp such as information on the open / closed state of the door sent from the door controller via the communication network 50.
- ECUs on-vehicle control controllers
- the meter controller 28 reads the information of the corresponding support state display image from the effect image storage memory 29 based on the received display start command of the support state display image. Then, an image display signal of the read support state display image is generated, and the generated image display signal is transmitted to the liquid crystal display device 26.
- the meter controller 28 also displays an assistance state display image for notifying the driver that the driving assistance control is inactive from the effect image storage memory 29 based on the received display end instruction of the assistance state display image. Information (hereinafter referred to as default image) is read. Then, an image display signal of the read default image is generated, and the generated image display signal is transmitted to the liquid crystal display device 26.
- the meter controller 28 transmits the received display start command for the HSA indicator lamp to the indicator 24 b of the second meter 24. In addition, the meter controller 28 transmits the received display end command for the HSA indicator lamp to the indicator 24 b of the second meter 24. In addition, the meter controller 28 transmits the received information on the engine speed and the remaining amount of fuel to the first meter 22, and transmits the received information on the vehicle speed and the coolant temperature to the second meter 24. In addition, the meter controller 28 transmits the received information related to the indicator display to the second meter 24.
- the first meter 22 and the second meter 24 are configured as mechanical meters.
- the present invention is not limited to this configuration, and a part of each meter constituting the first meter 22 and the second meter 24 or The whole may be configured to display a graphic in the display screen of the liquid crystal display device.
- the liquid crystal display device that displays each meter may be configured by a single unit or a plurality of units.
- the liquid crystal display device 26 may be enlarged to be used as a meter display.
- the effect image storage memory 29 is a memory for storing an effect image (support state display image) to be displayed on the liquid crystal display device 26.
- the effect image storage memory 29 stores effect images prepared in advance corresponding to the six types of driving support control. Details of the effect image will be described later.
- the meter device 20 is assembled at a position in front of the driver's seat of a vehicle-mounted dashboard (not shown).
- the meter device 20 includes a rectangular vertically long liquid crystal display device 26 in a meter panel 21 having a shape in which a “concave” shape is turned upside down and rounded at all corners in front view.
- the external configuration is arranged in the center, with a circular first meter 22 on the left side and a circular second meter 24 on the right side.
- the meter device 20 has a liquid crystal display device 26 in the peripheral visual field on the lower side of the driver when the driver of a predetermined physique is facing the front while sitting on the driver's seat at the preset seat position.
- the arrangement position has been adjusted so that the display screen is displayed. That is, in this embodiment, it is desirable to adjust the position so that the display screen of the liquid crystal display device 26 is within the peripheral visual field on the lower side of the driver by adjusting the seat height and the like according to the physique of the driver. .
- the display control controller 30 performs display control of the liquid crystal display device 26 and the indicator 24 b included in the meter device 20. Specifically, the display controller 30 informs the driver of the operating state of the driving support device 40 based on the operating flag and the steering angle ⁇ s received from the driving support device 40 and the steering angle sensor 3 via the communication network 50. The display control for displaying the support state display image on the liquid crystal display device 26 is performed. Further, in the present embodiment, display control of the HSA indicator lamp of the indicator 24b is performed at the time of operation of the HSA which is one of the driving support controls.
- FIG. 4 is a block diagram illustrating an example of a specific configuration of the display controller 30.
- the display controller 30 includes a display control ECU 300, an effect information storage memory 302, and a display time measurement timer 304.
- the display control ECU 300 includes an input processing unit 300A and a display control unit 300B.
- the display control unit 300B includes a display time delay processing unit 300C and an output signal processing unit 300D.
- the input processing unit 300 ⁇ / b> A receives operation flags for various driving support controls from the driving support device 40 via the communication network 50.
- the input processing unit 300 ⁇ / b> A receives the steering angle ⁇ s from the steering angle sensor 3 via the communication network 50.
- the input processing unit 300A inputs the received operation flag to the display time delay processing unit 300C.
- the input processing unit 300A performs a process of determining the steering direction based on the received steering angle ⁇ s and a preset steering angle threshold value. Specifically, the received absolute value of the steering angle ⁇ s is compared with a preset steering angle threshold value. For example, if it is determined that the absolute value of the positive steering angle ⁇ s is greater than or equal to the steering angle threshold value, right steering is performed. Judge that it was broken. On the other hand, if it is determined that the absolute value of the negative steering angle ⁇ s is greater than or equal to the steering angle threshold, it is determined that left steering has been performed.
- the steering direction information includes information on the left steering flag and the right steering flag.
- the left steering flag is a flag indicating that left steering is being performed when the signal is in the ON state (for example, the signal level is high), and left steering when the signal is in the OFF state (for example, the signal level is low). This is a flag indicating that no is performed.
- the right steering flag is a flag indicating that right steering is performed when the signal is in the ON state (for example, the signal level is high), and when the signal is in the OFF state (for example, the signal level is low). This flag indicates that right steering is not being performed. Further, when both the left steering flag and the right steering flag are OFF, it indicates that the steering wheel 1 is in the neutral position. Further, the input processing unit 300A receives the BHS information from the driving support device 40, the operation flag HSA, and the vehicle speed Vd from another system via the communication network 50.
- an HSA effect display command including an HSA support state display image display command and an HSA indicator lamp display command is transmitted via the communication network 50. Transmit to the meter device 20.
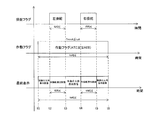
- the display time delay processing unit 300C determines the operation state of the driving support control based on the input operation flag. When it is determined that at least one of the five types of driving support control excluding the HSA has been activated, the minimum value set in advance for the driving support control determined to have been activated from the effect information storage memory 302. Information on display time (hereinafter referred to as minimum display time information) is acquired. In the present embodiment, the minimum display time can be set for each type of driving support control.
- the minimum display time is a time required to continuously display the support state display image on the display screen of the liquid crystal display device 26 in order to improve the recognition of the display content of the driver. is there.
- the support state display image is continuously displayed during the operation of the driving support control.
- the driving support control ends before the minimum display time preset for the driving support control elapses, the display of the support state display image is continued until the minimum display time elapses. To do.
- the display time of the assistance state display image for the driving assistance control that has been operating first has passed the minimum display time. Even if not, the display of the support state display image for the driving support control that has been operated later is immediately executed. In other words, the display control with priority is given to the later generation.
- the minimum display time information is information in which information indicating the type of driving support control is associated with a constant (for example, a count value of a timer) indicating the minimum display time corresponding to the type.
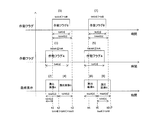
- the display time delay processing unit 300C inputs the minimum display time information acquired from the effect information storage memory 302 and the supplied operation flag to the output signal processing unit 300D. Based on the input minimum display time information and the operation flag, and the input steering direction information, the output signal processing unit 300D receives from the effect information storage memory 302 the support state display image corresponding to the corresponding driving support control. Read the display pattern information. Then, based on the read display pattern information and the count value of the display time measurement timer 304, an effect display command is generated, and the generated effect display command is transmitted to the meter device 20 via the communication network 50.
- the effect display command is command information including a display start command for various support state display images, a display switching command, a display end command, a display start command for the HSA indicator lamp, a display end command, and the like.
- the output signal processing unit 300 ⁇ / b> D determines that the operation flag has been turned on, the output signal processing unit 300 ⁇ / b> D transmits a display start command for the support state display image of the corresponding driving support control to the meter device 20 via the communication network 50. Further, after the display start command is transmitted, the display time measuring timer 304 is started to count, and the display time of the support state display image is measured.
- the output signal processing unit 300D determines the display end timing of the currently displayed support state display image based on the count value of the display time measurement timer 304. Specifically, when the output signal processing unit 300D determines that the operation flag is in the OFF state (all the operation flags are in the OFF state) and the display time of the support state display image has passed the minimum display time, the display end timing is reached. Judge that there is.
- the output signal processing unit 300D determines that the operation flag has been turned off (all the operation flags are in the off state) after the display time of the currently displayed support state display image has passed the minimum display time, the display is performed. It is determined that it is the end timing.
- the output signal processing unit 300 ⁇ / b> D determines that it is the display end timing
- the output signal processing unit 300 ⁇ / b> D transmits a display end command to the meter device 20 via the communication network 50. That is, the output signal processing unit 300D determines that there is no driving support control in operation, and causes the liquid crystal display device 26 to display a default image.
- the display switching command is a display command for switching the currently displayed assist state display image to another assist state display image for driving support control in which the operation flag is turned on.
- a support state display image (hereinafter referred to as a control intervention display image) to be displayed when it is determined that the driving support control has intervened is prepared in advance.
- an assistance state display image (hereinafter referred to as a scene-specific effect image) that is displayed by switching to a control intervention display image when it is determined that a preset operation scene is reached is prepared in advance. That is, these images are stored in advance in the effect image storage memory 29 of the meter device 20.
- the driving assistance control ATC and AEB have a clear scene in which the driving assistance control operates such as during the turning operation of the automobile V (however, the operation assistance control is not limited to the turning operation).
- the driving support control ATC and AEB with respect to the driving support control ATC and AEB, a display image at the time of control intervention and a scene-specific effect image each corresponding to the steering direction (left steering, right steering) indicated by the steering direction information are provided in advance. It is stored in the storage memory 29.
- the output signal processing unit 300D determines that the ATC or AEB is in the operating state based on the acquired operation flag ATC or AEB
- the output signal processing unit 300D reads the display pattern information of the driving support control ATC or AEB from the effect information storage memory 302. Then, when the driving support control ATC or AEB determines that the intervention state (the operation state and the steering wheel 1 is in the neutral position) based on the read display pattern information and the acquired steering direction information, display of the control intervention display image starts. Generate directives. Then, the generated display start command is transmitted to the meter device 20 via the communication network 50.
- the output signal processing unit 300D is operating in a scene in which the driving support control ATC or AEB is set in advance based on the operation flag ATC or AEB and the steering direction information (in the operating state and during left steering or right steering). ), A display switching command to a scene-specific effect image corresponding to left steering or right steering is generated. Then, the generated display switching command is transmitted to the meter device 20 via the communication network 50. In the present embodiment, the scene-specific effect image is displayed only during a period in which left steering or right steering is performed.
- the output signal processing unit 300D switches to the display image at the time of control intervention when the left steering or the right steering is completed.
- Display control is performed as follows. However, the operation flag ATC or AEB is in the OFF state until the total display time when the display image at the time of control intervention is first displayed and the display of the effect image for each scene is sandwiched between the minimum display time. However, display control is performed so that the display image is continuously displayed during control intervention.
- the effect information storage memory 302 is a memory that stores minimum display time information of various driving support controls and display pattern information of the support state display images corresponding to the various driving support controls.
- the effect information storage memory 302 stores the minimum display time information of the driving support control ATC, AEB, ARC, SMB, and HDC.
- the effect information storage memory 302 stores display pattern information of support information display images for driving support control ATC, AEB, ARC, SMB, HDC, and HSA.
- the display time measuring timer 304 is a timer counter that resets a count value in response to a reset command from the output signal processing unit 300D and starts counting in response to a count start command from the output signal processing unit 300D. Then, the display time measuring timer 304 inputs the counted value to the output signal processing unit 300D.
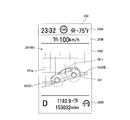
- FIG. 5 is a diagram illustrating an example of a display screen of the liquid crystal display device 26 and an example of a default image.
- the display screen 260 of the liquid crystal display device 26 has a display area on the image that is a first display area 260A, a second display area 260B, a third display area 260C, and a fourth display area 260D. Are divided into four areas.
- the first display area 260A is an area for displaying information such as time and temperature.
- the second display area 260B is an area for displaying information such as an operating state such as lane keep assist control, inter-vehicle maintenance control, and a vehicle speed set value for constant speed traveling control.
- the third display area 260C is an area for displaying the support state display image.
- the fourth display area 260D is an area for displaying information such as a shift position, a travel mode, an odometer measurement value, and a trip meter measurement value.
- the default image 261DF is displayed in the third display area 260C.
- the default image 261DF is an image that is displayed when no driving assistance control is operating, and includes a mesh image 261a and a vehicle image 261b as shown in FIG.
- the mesh image 261a is a grid-like planar image.
- the vehicle image 261b is, for example, an image of a viewpoint in which a vehicle of the same vehicle type as the automobile V is looked down from the upper rear side in the vehicle front-rear direction.
- the vehicle image 261b is displayed superimposed on the mesh image 261a.
- the mesh image 261a extends in the vehicle front-rear direction (perspective direction) of the vehicle image 261b, and the width (the overall width and the grid width) in the direction orthogonal to the front-rear direction (hereinafter referred to as the left-right direction) is rearward ( It has a shape that is wider toward the near side and narrower toward the front (far).
- the vehicle image 261b is superimposed and displayed at the approximate center in the front-rear direction and the left-right direction of the mesh image 261a. Further, the subsequent support state display images including the default image 261DF have a white background color because of the illustrated relationship. However, the background color is a background color that can make use of a display effect such as black, which will be described later. It is desirable.
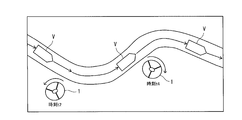
- FIG. 6A and 6B are diagrams illustrating an example of a display image at the time of control intervention.
- FIGS. 7A and 7B are diagrams illustrating an example of a scene-specific effect image.
- FIG. 7A is a diagram showing an example of a scene-specific effect image (hereinafter referred to as a left steering effect image) at the time of left steering determination, and
- FIG. It is a figure which shows an example of a right steering effect image.
- the control intervention display image 261IN shown in FIG. 6A is a support state display image displayed by the driving support control ATC or AEB during the intervention.
- the control intervention display image 261IN is an image obtained by superimposing a wheel image on the wheel position in the vehicle image 261b in the default image 261DF of FIG. Specifically, the wheel image 263FL is superimposed on the left front wheel position, the wheel image 263FR is superimposed on the right front wheel position, the wheel image 263BL is superimposed on the left rear wheel position, and the wheel image 263BR is superimposed on the right rear wheel position.
- the wheel images 263FL, 263FR, 263BL, and 263BR are displayed in a superimposed manner on the vehicle image 261b in a display color that provides a display effect in which the wheels are seen to emit light (hereinafter, this display mode is referred to as four-wheel lighting display).
- this display mode is referred to as four-wheel lighting display.
- the display color having a display effect that appears to emit light is a display color in which gradation or highlight is added based on blue, green, or the like.
- the left steering effect image 261LC shown in FIG. 7A is a support state display image displayed when the operation flag ATC or AEB is ON and the left steering flag is ON.
- the left steering effect image 261LC includes a left curve mesh image 261c obtained by deforming the mesh image 261a of FIG. 6 into a left-curved shape, a vehicle image 261b, and wheel images 263FL, 263FR, 263BL, and 263BR. ing.
- the left steering effect image 261LC is further provided with a semicircular effect display area 264LL whose arc portion faces the left outer side on the left side of the vehicle body around the vehicle image 261b.
- the left steering effect image 261LC is provided with a semicircular effect display region 264RL with the arc portion facing right outside on the right side of the vehicle body around the vehicle image 261b.
- the effect display areas 264LL and 264RL are large enough to wrap the entire vehicle image 261b when the two are connected to draw a circle.
- the effect display areas 264LL and 264RL which are areas surrounded by a broken line in FIG. 7A, are displayed in a display color that provides a display effect in which the areas appear to emit light.
- gradation display is performed so that the luminance (or lightness) is higher in a region closer to the vehicle image 261b in the effect display regions 264LL and 264RL, and the luminance (or lightness) is lower in a far region.
- the wheel images 263FL, 263FR, 263BL, and 263BR of the left steering effect image 261LC are also turned on and displayed in the same manner as the control intervention display image 261IN in FIG.
- an effect is not applied to a region excluding the left end and the right end 2 lines among the 6 lines extending in the perspective direction at the left and right center of the left curve mesh image 261LC.
- the display areas 264LL and 264RL are not provided.
- the central area where the effect is not displayed can be seen as if it were a traveling road.
- the right steering effect image 261RC shown in FIG. 7B is a support state display image displayed when the operation flag ATC or AEB is ON and the right steering flag is ON.
- the right steering effect image 261RC includes a right curve mesh image 261d obtained by deforming the mesh image 261a of FIG.
- the right steering effect image 261RC is provided with a semicircular effect display area 264LR whose arc portion faces the left outer side on the left side of the vehicle body around the vehicle image 261b. Further, the right steering effect image 261RC is provided with a semicircular effect display region 264RR with the arc portion facing right outside on the right side of the vehicle body around the vehicle image 261b.
- the right steering effect image 261RC is an image in which the left steering effect image 261LC is symmetric, and displays the same effect as the left steering effect image 261LC.
- FIG. 8 is a diagram illustrating an example of the effect image 261ARC, which is an ARC support state display image.
- the effect image 261ARC shown in FIG. 8 is a support state display image displayed when the operation flag ARC is ON.
- the effect image 261ARC includes a mesh image 261a, a vehicle image 261b, wheel images 263FL, 263FR, 263BL, and 263BR, and an effect display area 265.
- the effect display area 265 is an area surrounding the vehicle image 261 in a rectangular shape.
- the color of the lines forming the grid in the area surrounded by the effect display area 265 is displayed in a display color that produces a display effect that appears to be emitted.
- the wheel images 263FL, 263FR, 263BL, and 263BR in the effect image 261ARC are displayed in a four-wheel lighting manner.
- the driving support control ARC is a control that reduces the deterioration of riding comfort due to overcoming unevenness by quickly converging movements such as up / down behavior and left / right behavior of the roof due to overcoming unevenness on the road. That is, the display effect which gives the driver a sense of security as if the road surface in the area is leveled by shining a line in the effect display area 265 around the vehicle image 261b is aimed at.
- FIGS. 9A to 9D are diagrams showing an example of the effect image SMB which is the support state display image for SMB.
- the effect images 261SMB 1 to 261SMB 5 shown in FIGS. 9A to 9D are support state display images displayed when the operation flag SMB is in the ON state.
- the effect image 261SMB 1 includes a HP mesh image 261h and a vehicle image 261b.
- the HP-shaped mesh image 261h is a half-pipe-shaped image that is bent with an R so as to lift both the left and right ends of the mesh image 261a shown in FIG. With this shape, walls are formed on both the left and right sides of the vehicle image 261b.
- the effect image 261SMB 2 is displayed on the mesh image 261a of the effect image 261SMB 1 by the left-hand side effect display area AL1 immediately adjacent to the left side of the vehicle image 261b and the right effect display immediately adjacent to the right side.
- the area AR1 is provided.
- the effect image 261SMB 2 is displayed in a display color (hereinafter, referred to as “light emission display”) that produces a display effect that is seen by emitting light in the left effect display area AL1 and the right effect display area AR1.
- Effect image 261SMB 3 as shown in FIG. 9 (c), has a configuration in which a left effective display area AL2 adjacent to the left side of the left effect display area AL1 mesh image 261a in addition to the effect image 261SMB 2 .
- a right effect display area AR2 adjacent to the right side of the right effect display area AR1 of the mesh image 261a is provided.
- the effect image 261SMB 3 emits light in the left effect display areas AL1 to AL2 and the right effect display areas AR1 to AR2.
- Effect image 261SMB 4 as shown in FIG. 9 (d), has a configuration in which a left effective display area AL3 adjacent to the left side of the left effect display area AL2 mesh image 261a in addition to the effect image 261SMB 3 .
- a right effect display area AR3 adjacent to the right side of the right effect display area AR2 of the mesh image 261a is provided.
- the effect image 261SMB 4 performs light emission display in the left effect display areas AL1 to AL3 and the right effect display areas AR1 to AR3.
- Effect image 261SMB 5 as shown in FIG. 9 (e), and has a structure in which a left effective display area AL4 adjacent to the left side of the left effect display area AL3 mesh image 261a in addition to the effect image 261SMB 4 .
- a right effect display area AR4 adjacent to the right side of the right effect display area AR3 of the mesh image 261a is provided.
- the effect image 261SMB 5 illuminates and displays the left effect display areas AL1 to AL4 and the right effect display areas AR1 to AR4.
- the luminance (or lightness) is increased as the vehicle image 261b is closer in the perspective direction, and the light emission display is performed so that the luminance (or lightness) is decreased as it is farther away.
- the effect images 261SMB 1 to 261SMB 5 are continuously displayed to display an animation.
- the operation flag SMB is turned on when the driver turns on an SMB switch (not shown) for operating the driving support control SMB.
- the display controller 30, a display image in the third display area 260C of the liquid crystal display device 26 performs display control to switch to effect image 261SMB 1.
- the display controller 30 performs display control to display them effect image in the order of presentation image 261SMB 1 ⁇ effect image 261SMB 2 ⁇ effect image 261SMB 3 ⁇ effect image 261SMB 4 ⁇ effect image 261SMB 5.
- the animation display which light-emits sequentially from the one close
- the operation flag SMB is turned off.
- the display controller 30 displays the effect images 261SMB 5 ⁇ the effect image 261SMB 4 ⁇ the effect image 261SMB 3 ⁇ the effect image 261SMB 2 ⁇ the effect image 261SMB 1 in the third display area 260C of the liquid crystal display device 26.
- Display control to display Thereby, an animation display is performed in which the mesh image 261a is turned off from the left and right outer sides toward the inner side.
- the display controller 30 performs display control for displaying the default image 261DF in the third display region 260C of the liquid crystal display device 26.
- FIGS. 10A and 10B are diagrams illustrating an example of the effect image 261HSA that is an HSA support state display image.
- the effect image 261HSA (S) shown in FIG. 10 (a) is a support state displayed when the operation flag HSA is ON and the brake pedal 16 is depressed (hereinafter referred to as BH (Brake Hold) state). It is a display image.
- the effect image 261HSA (O) shown in FIG. 10 (b) is a state in which the driver removes his / her foot from the brake pedal 16 and the holding operation of the brake fluid pressure of the HSA is activated in the BH state (hereinafter referred to as the fluid pressure). It is a support state display image that is displayed when the holding operation state is reached.
- the effect image 261HSA (S) and the effect image 261HSA (O) are not distinguished, they are simply referred to as effect images 261HSA.
- the effect image 261HSA includes a mesh image 261e, a vehicle image 261f, wheel images 263SFL and 263SBL, and an uphill display line 266. .
- the mesh image 261e is a background image formed by intersecting a plurality of lines in a lattice shape.
- the vehicle image 261f is, for example, a side image of a vehicle of the same type as that of the automobile V when viewed from the left side, and is superimposed on the mesh image 261e.
- Wheel image 263SFL is an image of the left front wheel in vehicle image 261f.
- the wheel image 263SBL is an image of the left rear wheel in the vehicle image 261f.
- the uphill display line 266 is a straight line extending obliquely from the lower right side of the screen of the third display area 260C toward the left end of the screen (a straight line having an inclination angle of, for example, 15 ° with respect to the lower side of the third display area 260C). ), which is a line representing an uphill as viewed from the side. Therefore, the mesh image 261e is not displayed in the region opposite to the road surface side with the uphill display line 266 in the third display region 260C as a boundary, and is displayed only in the region on the road surface side.
- the vehicle image 261f is such that the front end of the vehicle image 261f is on the uphill display line 266 so that the tire lower ends of the wheel images 263SFL and 263SBL are in contact with the uphill display line 266 from the road surface side of the uphill display line 266.
- the effect image 261HSA is an image showing a state where the vehicle is stopped while climbing uphill.
- the display controller 30 displays the tire portions of the wheel images 263SFL and 263SBL in the effect image 261HSA (S) in a display color that produces a display effect that appears to be emitted.
- this display mode is referred to as wheel lighting display.
- the display controller 30 displays the tire portions of the wheel images 263SFL and 263SBL in the effect image 261HSA (O) in a display color that produces a display effect that appears to emit light, and the light emission display.
- the display color is displayed in a display mode that alternately repeats a display color that appears to be extinguished (for example, a color with low luminance (or lightness) such as black).
- this display mode is referred to as wheel flashing display.
- the display control controller 30 performs display control for lighting and displaying the HSA indicator lamp 240HSA in accordance with the wheel lighting display of the effect image 261HSA (S) as shown in the lower part of FIG. I do. Further, in the present embodiment, the display control controller 30 performs display control to blink the HSA indicator lamp 240HSA in accordance with the wheel blinking display of the effect image 261HSA (O) as shown in the lower part of FIG. I do.
- FIG. 11 is a diagram illustrating an example of the effect image 261HDC that is an HDC support state display image.
- the effect image 261HDC shown in FIG. 11 is a support state display image displayed when the operation flag HDC is in the ON state.
- the driving support control HDC operates, for example, by turning on a dedicated switch (hereinafter referred to as HDC switch) after fixing the vehicle V in a four-wheel drive state.
- the effect image 261HDC includes a mesh image 261g, a vehicle image 261i, wheel images 263SFL and 263SBL, and a downhill display line 267.
- the mesh image 261g is a background image having a pattern in which a plurality of lines are intersected in a lattice pattern.
- the vehicle image 261i is, for example, a side image of a vehicle of the same type as that of the automobile V when viewed from the left side, and is superimposed on the mesh image 261g.
- the downhill display line 267 is a wavy line extending obliquely from the lower left side of the screen of the third display area 260C toward the upper right side of the screen (for example, a wavy line having an inclination angle of 15 [°] with respect to the lower side of the third display area 260C). It is a line that expresses a downhill with bad road surface condition seen from the side. Therefore, the mesh image 261g is not displayed in the region opposite to the road surface side with respect to the downhill display line 267 in the third display region 260C, and is displayed only in the region on the road surface side.
- the front end of the vehicle image 261i is along the downhill display line 267 so that the lower end of the tires of the wheel images 263SFL and 263SBL are in contact with the downhill display line 267 from the road surface side of the downhill display line 267. It is arranged to face diagonally to the left. That is, the effect image 261HDC is an image showing a state where the vehicle is going downhill. Furthermore, in the present embodiment, the display controller 30 displays the tire portions of the wheel images 263SFL and 263SBL in the effect image 261HDC in a display color that produces a display effect that appears to emit light (wheel lighting display).
- the driving support control ATC, AEB, ARC, and SMB are generated in such a manner that the vehicle V has a relatively high vehicle speed, the vehicle V is turning, or the vehicle V has a large unevenness.
- the driving load is relatively large, such as overtaking. Therefore, in such a situation, it is difficult for the driver to gaze at the display screen 260 of the liquid crystal display device 26 and to recognize detailed display contents. Therefore, in the present embodiment, for the driving support control ATC, AEB, ARC, and SMB with relatively high driving load, the vehicle image is arranged on the mesh-like planar image and the vehicle is looked down from the upper rear side. The support status display image of the composition was displayed.
- the driving support control ATC, AEB, ARC, and SMB are operated, the mesh image portion around the vehicle image is displayed in a light-emitting manner. Furthermore, in a driving scene where the operation of the driving support control is clear, such as when turning, the shape of the mesh image is changed according to the driver's steering operation in addition to the light emission display of the mesh image portion around the vehicle image. I made it. Accordingly, the driver can recognize what kind of driving support control is activated by instantaneous line-of-sight movement and peripheral visual field without gazing at the display screen 260 of the liquid crystal display device 26. Become.
- the driving support control HSA and HDC are operated at a relatively low vehicle speed when the vehicle V is stopped in the middle of a steep uphill or on a downhill or snowy road where the vehicle V is steep.
- the driving load is relatively small, such as when driving. Therefore, in such a situation, it is relatively easy for the driver to recognize the display contents by looking at the display screen 260 of the liquid crystal display device 26. Therefore, in the present embodiment, when the driving support control HSA and HDC having a relatively small driving load are in operation, the vehicle image of the viewpoint when the vehicle is viewed from the side is displayed, and the operation state of the driving support control is displayed in the vehicle. Notification was made by light emission display and blinking display of the tire part of the wheel image in the image.
- the driver can recognize the relatively detailed operation status of the driving support control from the display content of the liquid crystal display device 26.
- the vehicle image portion of the effect image 261HSA has a shape similar to the indicator lamp 240HSA. This makes it easier for the driver to recognize that the driving support control HSA is operating when viewing the effect image 261HSA.
- FIG. 12 is a time chart for explaining an operation example during display control based on the minimum display time information of the present embodiment.
- the driving support control X is any one of driving support control ATC, AEB, ARC, SMB, and HDC.
- the display time delay processing unit 300C determines that the operation flag X input from the input processing unit 300A is in the ON state, the minimum display time corresponding to the driving support control X as the minimum display time information from the effect information storage memory 302. Read tminx. Then, the read minimum display time tminx and the input operation flags (all operation flags) are input to the output signal processing unit 300D.
- the output signal processing unit 300D determines that the operation flag X has been turned on based on the operation flag input from the display time delay processing unit 300C, the display pattern information corresponding to the driving support control X from the effect information storage memory 302 is displayed. Is read. Then, based on the read display pattern information, a display start command X of an assistance state display image X (hereinafter referred to as an effect image X) corresponding to the driving assistance control X is generated. Further, the output signal processing unit 300 ⁇ / b> D transmits the generated display start command X to the meter device 20 via the communication network 50. On the other hand, the output signal processing unit 300D outputs a count operation start command to the display time measurement timer 304, and starts the count operation (display time measurement) by the display time measurement timer 304.
- an assistance state display image X hereinafter referred to as an effect image X
- the meter control controller 28 of the meter device 20 receives the display start command X from the output signal processing unit 300D, the meter control controller 28 reads information on the effect image X corresponding to the received display start command X from the effect image storage memory 29. . Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal X of an image to be displayed on the display screen 260 is generated based on the read information of the effect image X and the acquired various information, and the generated image display signal X is input to the liquid crystal display device 26. In addition, since various contents displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D change depending on time and circumstances, the image display on the display screen 260 is set in advance. Update at intervals.
- the liquid crystal display device 26 Based on the input image display signal X, the liquid crystal display device 26 displays the effect image X on the display screen 260 as shown in (2) in FIG.
- the operation time tox of the driving support control X is longer than the minimum display time tminx. Therefore, the output signal processing unit 300D does not end the display of the effect image X even when the count value of the display time measurement timer 304 exceeds the minimum display time tminx, and shows (1) and (2) in FIG. As described above, display control is performed so that the effect image X is continuously displayed until the operation flag X is in the OFF state.
- the output signal processing unit 300D determines that the input operation flag X is in the OFF state, the output signal processing unit 300D generates a display end command for the effect image X. Then, the generated display end instruction is transmitted to the meter device 20 via the communication network 50.
- the meter control controller 28 of the meter device 20 When the meter control controller 28 of the meter device 20 receives the display end command from the output signal processing unit 300 ⁇ / b> D, it reads the information of the default image 261 ⁇ / b> DF from the effect image storage memory 29. Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal DF of an image to be displayed on the display screen 260 is generated based on the read information of the default image 261DF and the acquired various information, and the generated image display signal DF is input to the liquid crystal display device 26. The liquid crystal display device 26 displays a default image 261DF on the display screen 260 based on the input image display signal DF.
- FIG. 12 (3) an operation example in the case where the operation time tox of the driving support control X is shorter than the minimum display time tminx will be described.
- the output signal processing unit 300D determines that the operation flag X input from the display time delay processing unit 300C is in the OFF state, as shown in (4) in FIG. Display control is performed so that the effect image X is continuously displayed until the time tminx is reached or greater. That is, when the output signal processing unit 300D determines that the count value of the display time measuring timer 304 has reached the minimum display time tminx or more, the output signal processing unit 300D generates an effect image X display end command. Then, the generated display end instruction is transmitted to the meter device 20 via the communication network 50.
- the driving assistance control A is any one of driving assistance control ATC, AEB, ARC, SMB, and HDC.
- the driving support control B is any one of the driving support controls ATC, AEB, ARC, SMB, and HDC, which is different from the driving support control A.
- the display time delay processing unit 300C operates the operation flag A input from the input processing unit 300A.
- the display time delay processing unit 300C reads the minimum display time tminB corresponding to the driving support control B from the effect information storage memory 302. Then, the read minimum display time tminB and the input operation flag are input to the output signal processing unit 300D.
- the output signal processing unit 300D determines that the operation flag B is in the ON state while determining that the operation flag A is in the ON state based on the input operation flag, the output information processing unit 300D changes the effect information storage memory 302 to the driving support control B. Read the corresponding display pattern information. Then, based on the read display pattern information, a display switching command B to the effect image B corresponding to the driving support control B is generated. Further, the output signal processing unit 300 ⁇ / b> D transmits the generated display switching command B to the meter device 20 via the communication network 50. On the other hand, the output signal processing unit 300D outputs a reset command to the display time measurement timer 304 to reset the count value, and subsequently outputs a count operation start command to perform the count operation by the display time measurement timer 304. Start.
- the meter controller 28 of the meter device 20 when receiving the display switching command B from the output signal processing unit 300D, the meter controller 28 of the meter device 20 reads information on the effect image B corresponding to the received display switching command B from the effect image storage memory 29. . Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal B of an image to be displayed on the display screen 260 is generated based on the read information of the effect image B and the acquired various information, and the generated image display signal B is input to the liquid crystal display device 26. Based on the input image display signal B, the liquid crystal display device 26 displays the effect image B instead of the effect image A currently being displayed, as indicated by (8) in FIG.
- the operation time toB of the driving support control B is shorter than the minimum display time tminB. Therefore, even if the output signal processing unit 300D determines that the operation flag B input from the display time delay processing unit 300C is in the OFF state, the count value is the minimum display time as shown in (7) in FIG. Display control is performed so that the effect image B is continuously displayed until the value becomes equal to or greater than the value indicating tminB.
- FIG. 13 is a time chart for explaining an example of the display control operation when the driving support control ATC or AEB is activated.
- FIG. 14 is a diagram illustrating an example of a traveling scene in which the driving support control ATC or AEB is activated. In FIGS. 13 and 14, times t2 and t4 indicate the same time. As shown in FIG. 13, it is assumed that the driving support control ATC or AEB is activated and the operation flag ATC or AEB is turned on at time t1.
- the display time delay processing unit 300C reads the minimum display time information (here, the minimum display time tminA) corresponding to the driving support control ATC or AEB from the effect information storage memory 302. Then, the read minimum display time tminA and the input operation flag are input to the output signal processing unit 300D.
- the minimum display time information here, the minimum display time tminA
- the input operation flag are input to the output signal processing unit 300D.
- the output signal processing unit 300D determines that the operation flag ATC or AEB is in the ON state based on the operation flag input from the display time delay processing unit 300C, the output signal processing unit 300D corresponds to the driving support control ATC or AEB from the effect information storage memory 302. Read display pattern information. Then, based on the read display pattern information and the steering direction information (left steering flag and right steering flag) input from the input processing unit 300A, an instruction image display start command corresponding to the driving support control ATC or AEB is generated. To do.
- the output signal processing unit 300D since both the left steering flag and the right steering flag are in the OFF state, the output signal processing unit 300D generates a display start command for the control intervention display image 261IN. Then, the generated display start command is transmitted to the meter device 20 via the communication network 50. Thereby, on the display screen 260 of the liquid crystal display device 26, the control intervention display image 261IN shown in FIG. 6 is displayed instead of the currently displayed default image 261DF shown in FIG.
- the left steering flag is turned on.
- the output signal processing unit 300D generates a display switching command to the left steering effect image 261LC.
- the generated display switching command is transmitted to the meter device 20 via the communication network 50.
- the left steering effect image 261LC shown in FIG. 7A is displayed on the display screen 260 of the liquid crystal display device 26 in place of the control intervention display image 261IN currently being displayed.
- the output signal processing unit 300D A display switching command to the control intervention display image 261IN is generated. Then, the generated display switching command is transmitted to the meter device 20 via the communication network 50. Thereby, on the display screen 260 of the liquid crystal display device 26, instead of the currently displayed left steering effect image 261LC, a control intervention display image 261IN shown in FIG. 6 is displayed.
- the output signal processing unit 300D displays the control intervention display image.
- a display switching command to 261IN is generated.
- the generated display switching command is transmitted to the meter device 20 via the communication network 50.
- a control intervention display image 261IN shown in FIG. 6 is displayed.
- the output signal processing unit 300D when the operation flag ATC or AEB is turned off at time t6, the output signal processing unit 300D generates a display end command. Then, the generated display end instruction is transmitted to the meter device 20 via the communication network 50. As a result, a default image 261DF shown in FIG. 5 is displayed on the display screen 260 of the liquid crystal display device 26 in place of the control intervention display image 261IN currently being displayed.
- the operation flag ATC or AEB when the operation flag ATC or AEB is activated, the three images of the display image 261IN at the time of control intervention, the left steering effect image 261LC, and the right steering effect image 261RC are displayed by switching. The driver is informed that the driving support control ATC or AEB is operating.
- FIG. 15 is a time chart for explaining an example of the display control operation when the driving support control SMB is activated.
- the operation flag SMB is turned on by turning on the SMB switch.
- the display time delay processing unit 300C reads the minimum display time information (here, the minimum display time tminS) corresponding to the driving support control SMB from the effect information storage memory 302. Then, the read minimum display time tminS and the input operation flag are input to the output signal processing unit 300D.
- the output signal processing unit 300D determines that the operation flag SMB input from the display time delay processing unit 300C is in the ON state, the output signal processing unit 300D reads display pattern information corresponding to the driving support control SMB from the effect information storage memory 302. Then, based on the read display pattern information, a display start instruction for an effect image corresponding to the driving support control SMB is generated. Specifically, at time t1, output signal processing unit 300D generates display start command SMB 1 for effect image 261SMB 1 . Then, the generated display start command SMB 1 is transmitted to the meter device 20 via the communication network 50. On the other hand, the output signal processing unit 300D outputs a count operation start command to the display time measurement timer 304 and starts the count operation by the display time measurement timer 304.
- effect images meter controller 28 of the meter device 20 receives the display start instruction SMB 1, which based on the display start command SMB 1 received from the effect image storage memory 29, corresponding to the display start command SMB 1 received 261 SMB 1 information is read. Furthermore, the meter controller 28 sends various information to be displayed on the first display area 260A, the second display area 260B, and the fourth display area 260D of the display screen 260 from other controllers and instruments via the communication network 50. get. Then, an image display signal SMB 1 of an image to be displayed on the display screen 260 is generated based on the read information of the effect image SMB 1 and the acquired various information, and the generated image display signal SMB 1 is input to the liquid crystal display device 26. . Thus, the effect image 261SMB 1 shown in FIG. 9A is displayed on the display screen 260 of the liquid crystal display device 26.
- the output signal processing section 300D on the basis of the count value of the display time measuring timer 304 determines that the display time set in advance has elapsed, it generates a display start instruction SMB 2 effect image 261SMB 2. That is, at time t ⁇ b> 2 shown in FIG. 15, the output signal processing unit 300 ⁇ / b> D generates a display start command SMB 2 for the effect image 261 SMB 2, and sends the generated display start command SMB 2 to the meter device 20 via the communication network 50. Send. Thereby, instead of the effect image 261SMB 1 shown in FIG. 9A, the effect image 261SMB 2 shown in FIG. 9B is displayed on the display screen 260 of the liquid crystal display device 26.
- the output signal processing unit 300D displays a display start command SMB of the effect image 261SMB 3 at a time t3 after the preset display time from the time t2 shown in FIG. Generates 3 .
- the generated display start command SMB 3 is transmitted to the meter device 20 via the communication network 50.
- the display screen 260 of the liquid crystal display device 26 instead of the effect image 261SMB 2 shown in FIG. 9 (b), the effect image 261SMB 3 shown in FIG. 9 (c) is displayed.
- the output signal processing unit 300D displays a display start command SMB for the effect image 261SMB 4 at a time t4 after a preset display time from the time t3 shown in FIG. Generates 4 .
- the generated display start command SMB 4 is transmitted to the meter device 20 via the communication network 50.
- the effect image 261SMB 3 shown in FIG. 9C the effect image 261SMB 4 shown in FIG. 9D is displayed on the display screen 260 of the liquid crystal display device 26.
- the output signal processing unit 300D displays a display start command SMB for the effect image 261SMB 5 at a time t5 after a preset display time from the time t4 shown in FIG. Generate 5 .
- the generated display start command SMB 5 is transmitted to the meter device 20 via the communication network 50.
- the effect image 261SMB 4 shown in FIG. 9D the effect image 261SMB 5 shown in FIG. 9E is displayed on the display screen 260 of the liquid crystal display device 26.
- effect images 261SMB 1 to 261SMB 5 are continuously displayed in the order of effect image 261SMB 1 ⁇ effect image 261SMB 2 ⁇ effect image 261SMB 3 ⁇ effect image 261SMB 4 ⁇ effect image 261SMB 5 at preset display time intervals.
- animation display is performed in which the left effect display areas AL1 to AL4 and the right effect display areas AR1 to AR4 are lit and displayed in order from the side closer to the vehicle image 261b.
- the display controller 30 of the present embodiment when displaying the effect image 261SMB 5, during operation support control SMB is actuated, it controls the display to maintain display of the effect image 261SMB 5. Thereafter, when the driver turns off the SMB switch, the operation flag SMB is turned off at time t6 as shown in FIG. Thereby, the output signal processing unit 300D determines that the input operation flag SMB is in the OFF state.
- the output signal processing section 300D in turn, an effect image 261SMB 1 ⁇ SMB 5, the display time interval set in advance, an effect image 261SMB 5 ⁇ effect image 261SMB 4 ⁇ effect image 261SMB 3 ⁇ effect image 261SMB 2 ⁇ effect performing display control for continuous display in the order of the image 261SMB 1.
- the output signal processing unit 300D determines that the operation flag SMB is in the OFF state, the output signal processing unit 300D generates the display start command SMB 4 for the effect image 261SMB 4 . That is, at time t6 shown in FIG. 15, the output signal processing unit 300D generates a display start instruction SMB 4 effect image 261SMB 4, a display start instruction SMB 4 which generated, the meter device 20 via the communication network 50 Send.
- the output signal processing unit 300D outputs a reset command to the display time measurement timer 304 to reset the count value, and subsequently outputs a count operation start command to perform the count operation by the display time measurement timer 304. Start.
- the display screen 260 of the liquid crystal display device 26 instead of the effect image 261SMB 5 shown in FIG. 9 (e), an effect image 261SMB 4 shown in FIG. 9 (d) is displayed.
- the display time measuring timer 304 determines that the display time set in advance has elapsed, it generates a display start instruction SMB 3 effect image 261SMB 3. That is, at time t ⁇ b> 7 shown in FIG. 15, the output signal processing unit 300 ⁇ / b> D generates a display start command SMB 3 for the effect image 261 SMB 3 and sends the generated display start command SMB 3 to the meter device 20 via the communication network 50. Send.
- the display screen 260 of the liquid crystal display device 26 instead of the effect image 261SMB 4 shown in FIG. 9 (d), the effect image 261SMB 3 shown in FIG. 9 (c) is displayed.
- the output signal processing section 300D is displayed based on the time count value of the measurement timer 304 at time t8 after the lapse of display time set in advance from the time t7 shown in FIG. 15, the display start instruction of the effect image 261SMB 2 SMB 2 is generated. Then, the generated display start command SMB 2 is transmitted to the meter device 20 via the communication network 50.
- the display screen 260 of the liquid crystal display device 26 instead of the effect image 261SMB 3 shown in FIG. 9 (c), the effect image 261SMB 2 shown in FIG. 9 (b) is displayed.
- the output signal processing unit 300D displays a display start command SMB for the effect image 261SMB 2 at a time t9 after the preset display time from the time t8 shown in FIG. Generate 1 Then, the generated display start command SMB 1 is transmitted to the meter device 20 via the communication network 50.
- the display screen 260 of the liquid crystal display device 26 instead of the effect image 261SMB 2 shown in FIG. 9 (b), the effect image 261SMB 1 shown in FIG. 9 (a) is displayed.
- the output signal processing unit 300D issues a display start command DF for the default image 261DF at time t10 after the preset display time has elapsed from time t9 shown in FIG. Generate. Then, the generated display start command DF is transmitted to the meter device 20 via the communication network 50.
- the display screen 260 of the liquid crystal display device 26 instead of the effect image 261SMB 1 shown in FIG. 9 (a), the default image 261DF shown in FIG. 5 is displayed.
- FIG. 16 is a diagram illustrating an example of temporal changes in the vehicle speed Vd, the brake pedal operation amount Bd, the brake fluid pressure, and the operation flag HSA in the operation scene of the driving support control HSA.
- FIG. 17 is a diagram illustrating an example of the display content of the display screen 260 and the transition of the lighting state of the HSA indicator lamp 240HSA with respect to the transition of the driving state of the vehicle V and the pedal operation state of the driver in the operation scene of the driving support control HSA. It is.
- the input processing unit 300A determines that the driving support control HSA is inactive.
- the other driving support control is also deactivated here, and the output signal processing unit 300D performs display control processing of the default image 261DF.
- the default image 261DF is displayed on the display screen 260 of the liquid crystal display device 26.
- the operation flag HSA is turned off, the HSA indicator lamp 240HSA is turned off as shown in the indicator display content column corresponding to the braking state column in FIG.
- the operation flag HSA is turned on. That is, the driving support device 40 transmits the operation flag HSA in the ON state and other operation flags in the OFF state to the display controller 30 via the communication network 50.
- the input processing unit 300A determines that the operation flag HSA is in the ON state based on the received operation flag. In addition, the input processing unit 300A determines that the brake pedal 16 has been depressed based on the received BHS information. Thereby, the input processing unit 300A reads the display pattern information corresponding to the driving support control HSA from the effect information storage memory 302. Then, based on the read display pattern information, a display start command HSA (S) of the effect image 261HSA (S) of the driving support control HSA and a lighting display command of the HSA indicator lamp 240HSA are generated. Further, the input processing unit 300 ⁇ / b> A transmits the HSA effect display command including the generated display start command HSA (S) and the lighting display command to the meter device 20 via the communication network 50.
- the meter controller 28 of the meter device 20 receives the HSA effect display command including the display start command HSA (S) and the lighting display command from the input processing unit 300A.
- the meter controller 28 reads out information on the effect image 261HSA (S) corresponding to the display start command HSA (S) from the effect image storage memory 29 based on the received effect display command for HSA.
- the meter controller 28 sends various information to be displayed on the first display area 260A, the second display area 260B, and the fourth display area 260D of the display screen 260 from other controllers and instruments via the communication network 50. get.
- an image display signal HSA (S) of an image to be displayed on the display screen 260 is generated based on the read information of the effect image HSA (S) and the acquired various information, and the generated image display signal HSA (S) is liquid crystal.
- the meter controller 28 inputs a lighting display command of the indicator lamp 240HSA to the indicator 24b of the second meter 24.
- the effect image 261HSA (S) is displayed on the display screen 260 of the liquid crystal display device 26. That is, the effect image 261HSA (S) in which the tire portions of the wheel images 263SFL and 263SBL are lit is displayed.
- the indicator display content column corresponding to the vehicle stop state column in FIG. 17 the indicator lamp 240HSA is turned on.
- the brake fluid pressure of the driving support control HSA is set.
- the holding operation is started.
- time t4 to time t5 for example, a maximum of 2 [s]
- the brake fluid pressure is maintained and the stop state of the automobile V is maintained.
- BHS information indicating that the brake pedal 16 is in the released state is transmitted from the driving support device 40 to the display controller 30 via the communication network 50.
- the input processing unit 300A determines based on the received operation flag HSA and BHS information that the brake pedal 16 has been released while the driving support control HSA is operating. Thereby, the input processing unit 300A generates a display start command HSA (O) of the effect image 261HSA (O) and a blinking display command of the indicator lamp 240HSA. Further, the input processing unit 300 ⁇ / b> A transmits the HSA effect display command including the generated display start command HSA (O) and the blinking display command to the meter device 20 via the communication network 50.
- the meter controller 28 of the meter device 20 receives the HSA effect display command including the display start command HSA (O) and the blinking display command from the input processing unit 300A.
- the meter controller 28 reads out the information of the effect image 261HSA (O) corresponding to the display start command HSA (O) from the effect image storage memory 29 based on the received effect display command for HSA.
- the meter controller 28 sends various information to be displayed on the first display area 260A, the second display area 260B, and the fourth display area 260D of the display screen 260 from other controllers and instruments via the communication network 50. get.
- an image display signal HSA (O) of an image to be displayed on the display screen 260 is generated based on the read information of the effect image HSA (O) and the acquired various information, and the generated image display signal HSA (O) is liquid crystal.
- the meter controller 28 inputs a blink display command of the indicator lamp 240HSA to the indicator 24b of the second meter 24.
- the effect image 261HSA (O) is displayed on the display screen 260 of the liquid crystal display device 26. That is, in the effect image 261HSA (O), the tire portions of the wheel images 263SFL and 263SBL are displayed in a blinking manner.
- the indicator display content column corresponding to the brake fluid pressure holding state column in FIG. 17 the indicator lamp 240HSA is blinked.
- the driving support control HSA is deactivated and the brake fluid pressure becomes zero. That is, the operation flag HSA is turned off, and the operation flag HSA in the off state and other operation flags in the off state are transmitted from the driving support device 40 to the display controller 30 via the communication network 50. .
- the input processing unit 300A determines that the driving support control HSA is inactive.
- the output signal processing unit 300D determines that all the operation flags are in the OFF state, and performs display control processing for the default image 261DF. Accordingly, as shown in the liquid crystal display screen column corresponding to the vehicle start state column in FIG.
- the default image 261DF is displayed on the display screen 260 of the liquid crystal display device 26.
- the indicator lamp 240HSA is turned off as shown in the indicator display content column corresponding to the vehicle start state column in FIG.
- the function for determining the operation state of the driving support control based on the operation flag of the display controller 30 corresponds to the operation state determination unit.
- the display function of the support state display image of the display controller 30 corresponds to the display control unit.
- the steering direction detection function in the input processing unit 300A corresponds to the steering direction detection unit.
- the mesh images 261a, 261e and 261h, the left effect display areas AL1 to AL4, the right effect display areas AR1 to AR4, and the effect display area 265 correspond to the background image.
- the left curve mesh image 261c (including the effect display areas 264LL and 264RL) and the right curve mesh image 261d (including the effect display areas 264LR and 264RR) correspond to the background image.
- the display controller 30 detects the operating state of the driving support control performed by the in-vehicle driving support device 40.
- the display controller 30 displays a support state display image, which is a configuration in which the vehicle image 261 b is superimposed on a background image (for example, a mesh image 261 a) that is a plane image of a predetermined shape.
- the image is displayed on the liquid crystal display device 26 provided.
- the display control controller 30 determines that the driving support control is activated, the display control controller 30 performs display control to change the display mode of the mesh image 261a of the support state display image displayed on the liquid crystal display device 26 to a preset display mode.
- the operation of the driving support device 40 is notified to the driver by changing the display mode of the background image (for example, the mesh image 261a).
- the display mode of the background image for example, the mesh image 261a
- the driver's instantaneous line of sight can be obtained without paying attention to the display content. It is possible to capture changes in display content by movement and peripheral vision. Thus, even when the driving load is large, it is possible to accurately notify the driver that the driving support control is operating without making the driver feel bothered.
- the background image includes a mesh image 261a which is a mesh-like planar image and a gradation image (for example, display effect areas 264LL to RR, 265).
- a mesh image 261a which is a mesh-like planar image and a gradation image (for example, display effect areas 264LL to RR, 265).
- the vehicle image 261b is an image of a viewpoint looking down at the vehicle from the upper rear side of the vehicle.
- the background image (mesh image 261a) extends in the perspective direction with the vehicle front-rear direction of the vehicle image 261b as the perspective direction, and the width in the direction orthogonal to the perspective direction increases toward the near side and the width decreases toward the far side. It was set as the image of the shape which becomes. This makes it possible to display in a display mode in which the background image is assumed to be a road, for example, the background image is deformed into a curved shape in the turning direction of the vehicle. It becomes. Therefore, even when the driving load is relatively large, it is possible to accurately notify the driver that the driving support control is operating without making the driver feel more bothersome.
- the display controller 30 determines that the driving support control has been activated, the display color of the background image (mesh image 261a) within the distance range set in advance from the vehicle image 261b of the support state display image is set in advance. Display control to change to the set display color. In other words, the driver is informed that the driving support control is operating by changing the display color of the background image part. It is possible to easily grasp changes in display contents depending on the field of view. Thus, the driver can easily recognize that the driving support control is operating without paying attention to the display content.
- the display controller 30 controls each wheel of the vehicle that operates while the automobile V is traveling on a curved road to reduce the yaw rate delay, or adds a deceleration to the vehicle to curve. It is determined whether or not at least one of driving assistance control (AEB) for reducing the driving load when traveling on the road is activated. If it is determined by this determination that it has been activated, the shape of the background image (mesh image 261a) of the support state display image displayed on the liquid crystal display device 26 is bent in the steering direction based on the steering angle ⁇ s detected by the steering angle sensor 3. Display control to change to a curve shape (left curve mesh image 261LC, right curve mesh image 261RC) is performed.
- AEB driving assistance control
- the display controller 30 While the driving control (ATC, AEB) that operates during the turning operation of the automobile V is in operation, the display controller 30 displays the wheel shape image (the wheel at the wheel position in the vehicle image 261b of the support state display image. Images 263FL, 263FR, 263BL, and 263BR) are superimposed and displayed. The display control controller 30 performs display control for displaying the wheel images 263FL, 263FR, 263BL, and 263BR in a color that provides a preset display effect of light emission.
- the wheel images 263FL, 263FR, 263BL, and 263BR are displayed in a four-wheel light emission display (the control intervention display image 261IN is displayed). I tried to do it.
- the driver can recognize that the control is intervening by visually recognizing the display content displayed on the four wheels. Is possible.
- the background image is deformed and light-emitting, so that the driver can move the line of sight instantaneously without paying attention to the displayed content. It is possible to easily detect changes in display contents according to the peripheral visual field. Therefore, the driver can more easily recognize that the driving support control is operating without paying attention to the display content.
- the display controller 30 determines that the driving support control (SMB) for improving the running stability with respect to the steering angle that is activated while the vehicle V is traveling on the straight path is activated, the display is displayed on the liquid crystal display device 26.
- the shape is changed (mesh image 261h).
- the display controller 30 divides an image portion within a preset distance range from the vehicle image 261b of the mesh image 261h into a plurality of regions in a direction orthogonal to the perspective direction.
- the display controller 30 divides a plurality of partitioned areas (left effect display areas AL1 to AL4, right effect display areas RL1 to RL4) in order from the partitioned area closer to the vehicle image 261b toward the further separated area.
- Display control for changing the current display color to another preset color is performed. That is, an effect display in which walls are gradually formed on both sides of the vehicle image is performed by animation display by changing the display color. This makes it possible for the driver to easily grasp changes in the display contents according to the peripheral visual field without paying attention to the display contents, and to easily recognize what kind of driving support control has been activated. Become.
- the display control controller 30 performs display control to change the display color of the background image portion within the distance range set in advance from the vehicle image 261b to a display color that provides a preset display effect of light emission. That is, an image portion within a preset distance range from the vehicle image of the background image is changed to a color that produces a display effect that appears to emit light (for example, a color with high brightness or high brightness compared to the color of other regions). I did it. As a result, the driver can easily grasp the change in the display contents according to the peripheral visual field without paying attention to the display contents, so that the driver assistance control can be easily grasped. .
- an image for displaying a support state which is an image for informing the driver that the driving support control 40 is operating, is displayed on the liquid crystal display device 26.
- Perform display control Further, the display controller 30 performs display control to continue displaying the support state display image on the liquid crystal display device 26 until at least a preset minimum display time tmin has elapsed.
- the operation time of the driving support control varies, and the operation may be performed for a relatively short time depending on the operation state. In contrast to such driving assistance control that operates only for a relatively short time, when the assistance state display image is displayed for a short time, the assistance state display image is displayed instantaneously.
- Such a display is a cumbersome display for the driver who cannot recognize what is displayed. That is, for example, the minimum display time tmin is set to an appropriate time for the driver to recognize the display contents, and the display of the support state display image is continued at least until the minimum display time tmin elapses. Do. Thus, the driver can recognize what kind of driving support control has been activated without feeling bothered.
- the display controller 30 continuously displays the support state display image corresponding to the operating driving support control on the liquid crystal display device 26, and If it is determined that the driving support control has ended before the preset minimum display time tmin has elapsed, the minimum display time tmin indicates the display of the support state display image corresponding to the driving support control in operation on the liquid crystal display device 26. Display control is continued until it elapses. Thus, the driver can recognize what kind of driving support control has been activated without feeling bothered.
- the minimum display time tmin is set for each type of driving support control.
- the minimum display time tmin is set for each type of driving support control, for example, for driving support control with a relatively large driving load, it is possible to increase the visibility by increasing the display time of the support state display image. Display mode.
- the display controller 30 detects the operating state of the driving support control performed by the in-vehicle driving support device 40. When the display control controller 30 determines that the driving support control has been activated, the display control controller 30 performs display control for displaying on the display device an assistance state display image that is an image for notifying the driver of the operation.
- the display controller 30 determines that the driving load when the driving support control is determined to be relatively large, the first viewed from the viewpoint of looking down the vehicle from the upper rear side on the background image (for example, the mesh image 261a). In addition to displaying a high-load support state display image having a configuration in which vehicle images (vehicle image 261b, etc.) are superimposed, display control for displaying the display mode of the background image portion in a preset display mode is performed.
- the display controller 30 determines that the driving load at the time when it is determined that the driving support control is activated, the second vehicle image (vehicle image 261f) viewed from the viewpoint of viewing the side of the vehicle from the front. Or 261h), and display control for displaying the display mode of the wheel portion of the second vehicle image in a preset display mode. .
- the driving load is relatively large. .
- the vehicle V is stopped or starting from a stopped state on a steep uphill, or when the vehicle V is traveling on a steep downhill or snowy road at a relatively low vehicle speed, Is a relatively small situation. In such a situation, it is relatively easy for the driver to recognize the display contents by looking at the display screen 260 of the liquid crystal display device 26.
- the first vehicle image including the first vehicle image viewed from the viewpoint of looking down at the vehicle from the upper rear side is included, and the first vehicle image is the background image.
- a high load support state display image with a composition arranged on (mesh-like planar image) is displayed.
- the display mode of the background image portion is displayed in a preset display mode such that the background image portion around the first vehicle image is lit and displayed. Accordingly, the driver can recognize that the driving assistance control is operating by instantaneous line-of-sight movement or peripheral visual field without gazing at the display screen 260 of the liquid crystal display device 26.
- the low load support state display image including the second vehicle image of the viewpoint when the vehicle is viewed from the front side is displayed.
- the display mode of the wheel image portion is displayed in a preset display mode such that the tire portion of the wheel image in the second vehicle image is light-emitting displayed or blinked.
- the driving support control When the first condition set in advance is satisfied (for example, when the driver is stepping on the brake pedal 16 and the vehicle V is stopped), the driving support control operates in a standby state.
- the preset second condition when the driver removes his / her foot from the brake pedal 16
- a time difference type driving support control for shifting to the control execution state is included.
- the display controller 30 determines that the driving load is relatively small when it is determined that the time-difference driving support control (for example, the driving support control HSA) is activated in the standby state, a low load support state display image is displayed.
- the wheel portion of the second vehicle image in the low load support state display image is displayed in a display color that produces a display effect that appears to be emitted (for example, the effect image 261HSA (S) is displayed on the wheel. )
- Perform display control When the display controller 30 determines that the driving load is relatively small when it is determined that the time difference type driving support control has shifted from the standby state to the operating state, the second vehicle image in the low load support state display image.
- the display of the wheel portion in a display color that produces a display effect that appears to emit light and a display color that produces a display effect that appears to turn off are alternately repeated (for example, the effect image 261HSA (O) is displayed). Wheel display blinking) Display control.
- a low load support state display image (effect image 261HSA or 261HDC) corresponding to driving support control (driving support control HSA, HDC, etc.) operating on a hill is displayed on a hill display line (inclination line indicating a hill).
- the second vehicle image (vehicle image 261f or 261h) is disposed so as to include the uphill display line 266 or the downhill display line 267), and the slope display line is used as a ground contact surface of the tire portion of the second vehicle image.
- the configuration thus, the driver can easily recognize that the driving support control operating on the slope is operating by looking at the display screen 260 of the liquid crystal display device 26.
- FIG. 18 to 20 are diagrams showing an embodiment of the vehicle display control device and the vehicle display control method according to the second embodiment of the present invention.
- the first assistance state display image that is currently displayed is the driving assistance control that has been activated later.
- the second support state display image corresponding to is immediately switched and displayed.
- the switching display time elapses. Display of the first support state display image is continued.
- the second support state display image is displayed, which is different from the first embodiment.
- symbol is attached
- FIG. 18 is a block diagram showing a configuration of the display control controller 30 of the present embodiment.
- the display controller 30 according to the present embodiment includes a display control ECU 300, an effect information storage memory 302, a display time measurement timer 304, and an operation order storage memory 306.
- the operation order storage memory 306 is a memory for storing the operation order of the driving support control.
- the display control ECU 300 includes an input processing unit 300A and a display control unit 300B.
- the display control unit 300B includes a display time delay processing unit 300C, an output signal processing unit 300D, and an order determination unit 300E.
- the display time delay processing unit 300C of the present embodiment determines that the driving support control is operating based on the input operation flag, the driving support control determined to be operating from the effect information storage memory 302.
- the minimum display time information corresponding to is read.
- the display time delay processing unit 300C inputs the minimum display time information to the output signal processing unit 300D, and inputs the input operation flag to the order determination unit 300E.
- the order determination unit 300E stores the operation order of the driving support control in the operation order storage memory 306 based on the operation flag input from the display time delay processing unit 300C. And based on the memorize
- the order determining unit 300E inputs information indicating this to the output signal processing unit 300D when only one driving support control is operating or when none is operating.
- the order determining unit 300E uses the operation order stored in the operation order storage memory 306 as the display order, and outputs information on the display order as an output signal. Input to the processing unit 300D. Furthermore, the order determination unit 300E determines the display order according to the operation conditions of the driving support control when two or more types of driving support control are simultaneously operated. The order determination unit 300E inputs information on the determined display order to the output signal processing unit 300D.
- the operation condition of the driving support control is, for example, a condition that is satisfied according to the driver operating the driving operator such as the steering wheel 1 or a condition that is satisfied according to the input of the disturbance.
- the driving support control in which the operating condition is established according to the operation of the driving operator corresponds to, for example, driving support control ATC and AEB that operate according to the operation of the steering wheel 1.
- the driving support control in which the operation condition is established according to the input of the disturbance corresponds to, for example, the driving support control ARC that operates according to overcoming (input) of the road surface unevenness (disturbance). .
- operation-responsive driving support control which is driving support control in which control intervenes according to the operation of the driver's driving operator
- disturbance-responsive driving which is driving support control in which control intervenes in response to disturbance input.
- the output signal processing unit 300D of the present embodiment displays based on the switching display time tsw that is set in advance for each type of driving support control when two or more types of driving support control operate in succession. Take control.
- the switching display time tsw is set to a time shorter than the minimum display time tmin described in the first embodiment. For example, when the minimum display time tmin is set to 2.5 [s], the switching display time tsw is set to 2.0 [s], for example. That is, the minimum display time tmin is a time for improving the recognizability of the display contents of the driver, whereas the switching display time tsw is annoying to the driver by a short display switching. It is time to resolve.
- the support state display image corresponding to the driving support control that has started operation later is immediately switched to the previously displayed support state display image.
- the display time of the previously displayed support state display image is extremely short, after the previous support state display image is displayed for a moment, the subsequent support state display image is displayed. For this reason, the driver cannot recognize what is displayed and feels bothered.
- the output signal processing unit 300D uses the display time measurement timer 304 to display a support state display image (hereinafter referred to as first drive support control) corresponding to the drive support control (hereinafter referred to as first drive support control) that has started to operate.
- the display time of the first support state display image) is measured.
- the output signal processing unit 300D determines that the display time of the first support state display image is a switching display time tsw (hereinafter referred to as the first display time) set in advance for the first driving support control. It is determined whether or not the switching display time tsw1 has elapsed. If it is determined by this determination that the output signal processing unit 300D has not elapsed, display control for continuously displaying the first support state display image is performed until the first switching display time tsw1 has elapsed.
- the output signal processing unit 300D displays an assistance state display image (hereinafter, referred to as a second assistance state display image) corresponding to the driving assistance control (hereinafter, referred to as second driving assistance control) that has started to operate later. Is displayed on the liquid crystal display device 26. Also at this time, the output signal processing unit 300D measures the display time by the display time measuring timer 304. Then, the output signal processing unit 300D of the present embodiment displays the second support state display image based on the measurement time, at least a switching display time tsw (hereinafter, referred to as “second display”) for the second driving support control. Display control is performed until the second switching display time (tsw2) elapses.
- second display a switching display time tsw
- the operation time of the second driving support control is equal to or shorter than the minimum display time tmin.
- the output signal processing unit 300D performs display control for continuously displaying the second support state display image until the second switching display time tsw2 elapses.
- the output signal processing unit 300D displays the second support state display image as the second display time tsh2. Display control to display until it passes.
- the operation time of the second driving support control is longer than the minimum display time tmin and the display time of the second support state display image is longer than the second switching display time tsw2 will be described.
- display control is performed to continue displaying the support state display image corresponding to the operating driving support control.
- the output signal processing unit 300D performs display control for continuously displaying the second support state display image until the second driving support control is completed.
- the second support state display image is not limited to the configuration for displaying at least the second switching display time tsw2, but at least the second support state display image is displayed, and then the second driving support control is performed. On the other hand, it is good also as a structure displayed until the preset minimum display time passes.
- the switching display time tsw is set similarly for the default image. For example, it is assumed that another driving support control is activated before a switching display time tsw set in advance for the default image has elapsed after returning to the display of the default image after a certain driving support control is completed. In this case, the output signal processing unit 300D continues to display the default image until a preset switching display time tsw has elapsed for the default image.
- the information about the switching display time is included in the display pattern information stored in the effect information storage memory 302.
- the output signal processing unit 300D performs display control based on the display order input from the order determining unit when the operation corresponding driving support control and the disturbance corresponding driving support control operate simultaneously.
- the output signal processing unit 300D displays the support state display image corresponding to the operation support driving support control (hereinafter referred to as operation). Display control of the corresponding display image) is performed first. Specifically, the output signal processing unit 300D first performs display control to display the operation-related display image until the minimum display time preset for the operation-related driving support control elapses.
- display control of a support state display image (hereinafter referred to as a disturbance response display image) corresponding to the disturbance response driving support control is performed. Specifically, in the present embodiment, display control is performed to display a disturbance-corresponding display image until a minimum display time preset for the disturbance-responsive driving support control elapses.
- FIG. 19 is a time chart for explaining an example of the display control operation in the case where the driving support control is continuously activated.
- the display time delay processing unit 300C receives driving assistance as minimum display time information from the effect information storage memory 302. Read the minimum display time tminA corresponding to the control A.
- the driving assistance control A is any one of driving assistance control ATC, AEB, ARC, SMB, and HDC.
- the display time delay processing unit 300C inputs the read minimum display time tminA to the output signal processing unit 300D. Further, the display time delay processing unit 300C inputs the input operation flag to the order determination unit 300E.
- the order determination unit 300E stores the operation order of the driving support control in the operation order storage memory 306 based on the input operation flag. As shown in (1) in FIG. 19, since the driving support control A is first operating, the order determining unit 300E stores information on the operating order (No. 1) of the driving support control A in the operating order storage memory 306. Remember. Then, display order information indicating that the driving support control A is operating is input to the output signal processing unit 300D.
- the output signal processing unit 300D determines that the driving support control A is in an operating state based on the display order information input from the order determining unit 300E, the display pattern corresponding to the driving support control A from the effect information storage memory 302 is displayed. Read information A. Then, based on the read display pattern information A, a display start command A for an assistance state display image X (hereinafter referred to as an effect image A) corresponding to the driving assistance control A is generated. Furthermore, the output signal processing unit 300 ⁇ / b> D transmits the generated display start command A to the meter device 20 via the communication network 50. On the other hand, the output signal processing unit 300D outputs a count operation start command to the display time measurement timer 304, and starts the count operation (display time measurement) by the display time measurement timer 304.
- the meter controller 28 of the meter device 20 when receiving the display start command A from the output signal processing unit 300D, the meter controller 28 of the meter device 20 reads information on the effect image A corresponding to the received display start command A from the effect image storage memory 29. . Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal A of an image to be displayed on the display screen 260 is generated based on the read information of the effect image A and the acquired various information, and the generated image display signal A is input to the liquid crystal display device 26.
- the liquid crystal display device 26 Based on the input image display signal A, the liquid crystal display device 26 displays the effect image A on the display screen 260 as shown in (2) of FIG. Subsequently, as shown in (3) in FIG. 19, when the operation flag B of the driving support control B is turned on while the driving support control A is operating, the display time delay processing unit 300C reads from the effect information storage memory 302. The minimum display time tminB corresponding to the driving support control B is read out as the minimum display time information. Then, the read minimum display time tminB is input to the output signal processing unit 300D. Further, the display time delay processing unit 300C inputs the input operation flag to the order determination unit 300E.
- the order determination unit 300E stores information on the operation order (No. 2) of the driving support control B in the operation order storage memory 306 based on the input operation flag. Then, display order information indicating that the driving support control A is No. 1 and the driving support control B is No. 2 based on the stored operation order information is input to the output signal processing unit 300D.
- the output signal processing unit 300D determines that the driving support control B is in an operating state during the operation of the driving support control A based on the display order information input from the order determining unit 300E, the output signal processing unit 300D drives from the effect information storage memory 302. Display pattern information B corresponding to support control B is read.
- the output signal processing unit 300D determines whether or not the display time of the effect image A has passed the switching display time tswA that is preset for the driving support control A. Determine. As shown in (2) to (3) in FIG. 19, when the driving support control B is activated, the display time of the effect image A (tshA in FIG. 19) is shorter than the switching display time tswA. Therefore, the output signal processing unit 300D performs display control so that the effect image A is continuously displayed until the display time of the effect image B has passed the switching display time tswA.
- the output signal processing unit 300D determines that the display time of the effect image A has passed the switching display time tswA, the output state processing image 300D (hereinafter referred to as the support state display image B corresponding to the driving support control B based on the display pattern information B) A display switching command B of the effect image B) is generated. Then, the generated display switching command B is transmitted to the meter device 20 via the communication network 50.
- the output signal processing unit 300D outputs a reset command to the display time measurement timer 304 to reset the count value, and subsequently outputs a count operation start command to perform the count operation by the display time measurement timer 304. Start.
- the meter control controller 28 of the meter device 20 receives the display switching command B from the output signal processing unit 300D, the meter control controller 28 reads information on the effect image B corresponding to the received display switching command B from the effect image storage memory 29. Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal B of an image to be displayed on the display screen 260 is generated based on the read information of the effect image B and the acquired various information, and the generated image display signal B is input to the liquid crystal display device 26.
- the liquid crystal display device 26 displays the effect image B instead of the effect image A on the display screen 260 based on the input image display signal B, as shown in (4) in FIG.
- the time when the minimum display time tminA has elapsed from the operation start time t1 of the driving support control B is time t3.
- the time from the display start time t2 to the time t3 of the effect image B, that is, the display time tshB of the effect image B is equal to or longer than the switching display time tswB set in advance for the driving support control B. Therefore, the output signal processing unit 300D performs display control for displaying the effect image B until the display time tshB elapses.
- the output signal processing unit 300D determines that the display time of the effect image B has passed the display time tshB, the output signal processing unit 300D generates a display end command for the effect image B. Then, the generated display end instruction is transmitted to the meter device 20 via the communication network 50.
- the meter control controller 28 of the meter device 20 When the meter control controller 28 of the meter device 20 receives the display end command from the output signal processing unit 300 ⁇ / b> D, it reads the information of the default image 261 ⁇ / b> DF from the effect image storage memory 29. Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal DF of an image to be displayed on the display screen 260 is generated based on the read information of the default image 261DF and the acquired various information, and the generated image display signal DF is input to the liquid crystal display device 26. The liquid crystal display device 26 displays a default image 261DF on the display screen 260 instead of the effect image B based on the input image display signal DF.
- the difference from (1) to (4) in FIG. 19 is that the start time of the driving support control B is early. Therefore, the time (display time tshB) from the display start time t5 to the time t6 of the effect image B is the switching display time tswB with respect to the time t6 when the minimum display time tminB has elapsed from the operation time t4 of the driving support control B. Is shorter. In such a case, the output signal processing unit 300D performs display control for continuously displaying the effect image B from the display start time t5 until the switching display time tswB elapses, that is, from the time t5 to the time t7.
- FIG. 20 is a time chart for explaining an example of the display control operation when the operation-responsive driving support control and the disturbance-responsive driving support control are simultaneously activated.
- the operation flag of the operation support driving support control is referred to as an operation support operation flag
- the operation flag of the disturbance support driving support control is referred to as a disturbance response operation flag.
- the display time delay processing unit 300C reads from the effect information storage memory 302 the minimum display time tminC corresponding to the operation support driving support control C as the minimum display time information. Furthermore, the display time delay processing unit 300C reads the minimum display time tminD corresponding to the disturbance handling driving support control D from the effect information storage memory 302 as the minimum display time information.
- the operation corresponding driving support control C is one of the driving support control ATC and AEB.
- the disturbance handling driving support control D is the driving support control ARC.
- the display time delay processing unit 300C inputs the read minimum display times tminC and tminD to the output signal processing unit 300D. Further, the display time delay processing unit 300C inputs the input operation flag to the order determination unit 300E.
- the order determination unit 300E stores the operation order of the driving support control in the operation order storage memory 306 based on the input operation flag. In this case, the order determination unit 300E stores operation order information indicating that the operation corresponding driving support control C and the disturbance corresponding driving support control D are simultaneously operated in the operation order storage memory 306. Furthermore, the order determination unit 300E generates display order information in which the operation-corresponding driving support control C is No. 1 and the disturbance-corresponding driving support control D is No. 2, based on the stored operation order information, and the generated display order information Is input to the output signal processing unit 300D.
- the output signal processing unit 300D reads the display pattern information C corresponding to the operation support driving support control C from the effect information storage memory 302 based on the display order information input from the order determining unit 300E. Then, based on the read display pattern information C, a display start command C for a support state display image C (hereinafter referred to as an effect image C) corresponding to the operation support driving support control C is generated. Further, the output signal processing unit 300 ⁇ / b> D transmits the generated display start command C to the meter device 20 via the communication network 50. On the other hand, the output signal processing unit 300D outputs a count operation start command to the display time measurement timer 304 and starts the count operation by the display time measurement timer 304.
- the meter controller 28 of the meter device 20 when receiving the display start command C from the output signal processing unit 300D, the meter controller 28 of the meter device 20 reads information on the effect image C corresponding to the received display start command C from the effect image storage memory 29. . Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal C of an image to be displayed on the display screen 260 is generated based on the read information of the effect image C and the acquired various information, and the generated image display signal C is input to the liquid crystal display device 26.
- the liquid crystal display device 26 Based on the input image display signal C, the liquid crystal display device 26 displays the effect image C on the display screen 260 as shown in (3) of FIG. In the example of FIG. 20, since the operation time toC of the operation corresponding driving support control C is shorter than the minimum display time tminC, the output signal processing unit 300D has the minimum display time tminC after the operation corresponding driving support control C ends. Display control is performed to continuously display the effect image C until the time has elapsed.
- the output signal processing unit 300D determines that the display time of the effect image C has passed the minimum display time tminC
- the output signal processing unit 300D reads the display pattern information D corresponding to the disturbance corresponding driving support control D from the effect information storage memory 302. . Then, based on the read display pattern information D, a display switching command D for an assistance state display image D (hereinafter referred to as an effect image D) corresponding to the disturbance handling driving assistance control D is generated. Then, the generated display switching command D is transmitted to the meter device 20 via the communication network 50.
- the output signal processing unit 300D outputs a reset command to the display time measurement timer 304 to reset the count value, and subsequently outputs a count operation start command to perform the count operation by the display time measurement timer 304. Start.
- the meter control controller 28 of the meter device 20 receives the display switching command D from the output signal processing unit 300D, the meter control controller 28 reads information on the effect image D corresponding to the received display switching command D from the effect image storage memory 29. Furthermore, the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50. Then, an image display signal D of an image to be displayed on the display screen 260 is generated based on the read information of the effect image D and the acquired various information, and the generated image display signal D is input to the liquid crystal display device 26.
- the liquid crystal display device 26 displays the effect image D instead of the effect image C on the display screen 260 based on the input image display signal D, as shown in (4) in FIG.
- the output signal processing unit 300D since the operation time toD of the disturbance handling operation support control D is shorter than the minimum display time tminD, the output signal processing unit 300D has the minimum display time tminD after the disturbance support driving support control D ends. Display control for continuously displaying the effect image D until the time has elapsed.
- the output signal processing unit 300D determines that the display time of the effect image D has passed the minimum display time tminD
- the output signal processing unit 300D generates a display end command for the effect image D.
- the generated display end instruction is transmitted to the meter device 20 via the communication network 50.
- the meter control controller 28 of the meter device 20 receives the display end command from the output signal processing unit 300 ⁇ / b> D, it reads the information of the default image 261 ⁇ / b> DF from the effect image storage memory 29.
- the meter controller 28 acquires various information to be displayed in the first display area 260A, the second display area 260B, and the fourth display area 260D from another controller, instrument, or the like via the communication network 50.
- an image display signal DF of an image to be displayed on the display screen 260 is generated based on the read information of the default image 261DF and the acquired various information, and the generated image display signal DF is input to the liquid crystal display device 26.
- the liquid crystal display device 26 displays a default image 261DF on the display screen 260 instead of the effect image D based on the input image display signal DF.
- the function for determining the operation state of the driving support control based on the operation flag of the display controller 30 corresponds to the operation state determination unit.
- the display control function of the support state display image of the display controller 30 corresponds to the display control unit.
- the steering direction detection function in the input processing unit 300A corresponds to the steering direction detection unit.
- the mesh images 261a, 261e and 261h, the left effect display areas AL1 to AL4, the right effect display areas AR1 to AR4, and the effect display area 265 correspond to the background image.
- the left curve mesh image 261c (including the effect display areas 264LL and 264RL) and the right curve mesh image 261d (including the effect display areas 264LR and 264RR) correspond to the background image.
- the display controller 30 determines that the driving support control performed by the in-vehicle driving support device 40 is in operation, the display control controller 30 is for displaying an assistance state that is an image for informing the driver that the driving is being operated. The image is displayed on a liquid crystal display device 26 provided in the meter panel 21 of the meter device 20. The display control controller 30 determines that the second driving support control different from the first driving support control has been operated while the first driving support control is being operated, and the first driving display that has been displayed first.
- the switching display time tsw has passed through the first support state display image. Display control is performed until the display control is performed, and after the display control is executed, display control for displaying a second support state display image corresponding to the second driving support control is performed.
- the display time of the first support state display image that has been displayed has passed the switching display time tsw. It is determined whether or not. If it is determined that the switching display time tsw has not elapsed, the display control for immediately switching to and displaying the second support state display image is not performed, and the first display until the switching display time tsw has elapsed.
- One support state display image is continuously displayed. Thereby, even when the second driving support control is activated at the timing when the first support state display image is displayed for a very short time, the first support state display image is always displayed until the switching display time tsw elapses. Is displayed. Therefore, by setting the switching display time tsw to an appropriate time, it is possible to prevent an extremely short display state of the support state display image from being generated, and the troublesomeness given to the driver by such display is reduced. It becomes possible to do.
- Operation support driving support control for example, driving support control ATC, AEB, etc.
- driving support control ATC for example, driving support control ATC, AEB, etc.
- disturbance-responsive driving support control for example, driving support control ARC, etc.
- Status display images effect images 261IN, 261LC, 261RC, etc.
- display control for displaying a support state display image (such as the effect image 261ARC) corresponding to the disturbance responsive driving support control is performed.
- the operation-supporting driving support control operates in accordance with the operation of the driving operator such as the steering wheel 1 by the driver, and thus operates under a driving condition recognized by the driver.
- the disturbance-responsive driving support control operates in response to an input of disturbance such as road irregularities, and thus may operate in a situation that is not recognized by the driver. Therefore, when the operation support driving support control and the disturbance support driving support control are activated at the same time, the support state display image corresponding to the operation support driving support control is preferentially displayed, so that appropriate support is provided at an appropriate timing. It is possible to display a state display image.
- the switching display time tsw is set for each type of driving support control.
- the switching display time tsw is set for each type of driving support control.
- the driving support controls HSA and HDC are set in advance as controls that operate in a relatively small driving load, and the driving support controls ATC, AEB, ARC, and SMB are set in a relatively large driving load. It was preset as a control to operate.
- the driving support control that operates when the driving load is relatively large and the driving support control that operates when the driving load is relatively small include vehicle images viewed from different viewpoints and display modes during control operation. A different support state display image is displayed. For example, when the display controller 30 determines that the vehicle speed Vd is equal to or higher than a preset vehicle speed threshold based on the vehicle speed Vd of the vehicle V, the driving load is determined to be relatively large.
- the driving support control that operates in a situation where the driving load is relatively large and the driving assistance control that operates in a situation where the driving load is relatively small include and control vehicle images viewed from different viewpoints. It is good also as a structure which displays the image for assistance state display from which the display mode at the time of an operation
- a display that allows the driver to recognize a rough operating state such as what kind of driving support control is operating with quick line-of-sight movement and peripheral vision It is possible to display a support state display image of the content.
- the driver can view the display content, for example, to display a support state display image with a display content that understands the detailed operation status of the drive support control. It becomes possible.
- This can be applied not only to different driving support controls but also to the same driving support control. That is, even when the driving support control is the same, the content to be displayed can be changed to an appropriate content according to the magnitude of the driving load when the driving load is relatively large and when the driving load is small.
- the driving support controls HSA and HDC are set in advance as controls that operate in a relatively small driving load, and the driving support controls ATC, AEB, ARC, and SMB are set in a relatively large driving load. It was preset as a control to operate.
- the driving support control that operates when the driving load is relatively large and the driving support control that operates when the driving load is relatively small include vehicle images viewed from different viewpoints and display modes during control operation. A different support state display image is displayed.
- the display controller 30 detects the gradient of the travel path based on the detection value of an inclination angle sensor (not shown) mounted on the automobile V.
- the driving support control that operates in a situation where the driving load is relatively large and the driving assistance control that operates in a situation where the driving load is relatively small include and control vehicle images viewed from different viewpoints. It is good also as a structure which displays the image for assistance state display from which the display mode at the time of an operation
- the driver can recognize a rough operating condition such as what kind of driving support control is operating with quick line-of-sight movement and peripheral vision It is possible to display an image for displaying the support state of the display content.
- the driver views the display content, for example, displays a support state display image of the display content that understands the detailed operation status of the driving support control. It becomes possible. This can be applied not only to different driving support controls but also to the same driving support control. That is, even when the driving support control is the same, the content to be displayed can be changed to an appropriate content according to the magnitude of the driving load when the driving load is relatively large and when the driving load is small.
- V automobile 1: steering wheel 3: steering angle sensor 16: brake pedal 17: brake operation detection device 20: meter device 21: meter panel 22: first meter 24: second meter 24b: indicator 26: liquid crystal display device 28: Meter controller 29: Effect image storage memory 30: Display controller 40: Driving support device 260: Display screen 260C: Third display area 261a, 261e, 261h: Mesh image 261b, 261f: Vehicle image 261DF: Default image 261IN: Control Intervention display image 261LC: Left steering effect image 261RC: Right steering effect image 261ARC, 261SMB 1 to SMB 5 , 261HSA (S), 261HSA (O), 261HDC: Effect image 300: ECU for display control 300A: Input processing unit 300B: Display control unit 300C: Display time delay processing unit 300D: Output signal processing unit 300E: Order determination unit 302: Memory for effect information storage 304: Timer for display time measurement
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Computer Hardware Design (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Instrument Panels (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Regulating Braking Force (AREA)
- Control Of Transmission Device (AREA)
Abstract
Description
本発明は、上記のような点に着目したもので、運転負荷が比較的大きい状況でも運転支援制御に係る情報の認知性が比較的良好でかつ運転者にとって煩わしくない情報表示を行うことを目的としている。
以下、本発明の第1実施形態を図面に基づき説明する。図1~図17は、本発明の第1実施形態に係る車両用表示制御装置及び車両用表示制御方法の実施形態を示す図である。(構成)
図1は、本実施形態に係る車両用表示制御装置を適用した自動車Vのモデルを示す概念図である。
本実施形態の自動車Vは、SBW(ステアバイワイヤ)システムを搭載している。この自動車Vは、図1に示すように、運転者が操舵操作可能なステアリングホイール1と、左右前輪(転舵輪)11R,11Lと、ステアリングシャフト2と、を備える。
ステアリングホイール1は、左右前輪11R,11Lとは機械的に切り離し可能に設けている。ステアリングホイール1は、ステアリングシャフト2に連結している。
自動車Vは、更に、操舵角センサ3と、反力モータ4と、操舵トルクセンサ5と、を備える。操舵角センサ3と、反力モータ4と、操舵トルクセンサ5とは、ステアリングシャフト2に設けている。
操舵角センサ3は、ステアリングホイール1の操舵角θsを検出するものであり、エンコーダ等で構成する。
操舵トルクセンサ5は、ステアリングホイール1からステアリングホイール2に伝達する操舵トルクTを検出する。この操舵トルクセンサ5は、トーションバーの捩れ角変位をポテンショメータで検出することで、操舵トルクTを検出する構成となっている。
自動車Vは、更に、クラッチ6と、ピニオンシャフト7と、転舵モータ8と、転舵モータ角センサ9と、ピニオンギア12と、ラック軸13と、タイロッド14と、ナックルアーム15と、SBWコントローラ80と、を備える。
このクラッチ6は、通常状態では、解放状態となっており、SBWシステムに何らかの異常(例えば操舵反力系の異常)が発生したときに締結状態となる。当該異常が発生してクラッチ6を締結した状態では、操舵系に運転者の操舵負担を軽減するための操舵補助力を付与する操舵補助制御(以下、EPS制御という)を行う。
クラッチ6の解放状態では、ステアリングホイール1と転舵輪11R,11Lとの間のトルク伝達経路が機械的に分離するため、ステアリングホイール1の操舵操作が転舵輪11R,11Lへ伝達しない状態となる。一方、クラッチ6の締結状態では、ステアリングホイール1と転舵輪11R,11Lとの間のトルク伝達経路が機械的に結合するため、ステアリングホイール1の操舵操作が転舵輪11R,11Lへ伝達する状態となる。
ラック軸13の両端は、それぞれタイロッド14及びナックルアーム15を介して、転舵輪11R,11Lに連結している。すなわち、転舵輪11R,11Lは、ピニオンギア12の回転に応じてラック軸13が車幅方向へ変位することで、タイロッド14及びナックルアーム15を介して転舵し、自動車Vの進行方向を変化可能となっている。
転舵モータ8の出力軸先端側には、ピニオンギア12を用いて形成した転舵出力歯車8aを設けている。そして、転舵出力歯車8aは、ラック軸13の両端部間に設けたラックギアと噛合する。すなわち、転舵輪11R,11Lは、転舵出力歯車8aの回転に応じて転舵可能となっている。
SBWコントローラ80は、操舵角センサ3で検出したステアリングホイール1の操舵角θsと、操舵トルクセンサ5で検出した操舵トルクTと、転舵モータ角センサ9で検出した転舵角θrとを入力する。また、SBWコントローラ80は、この他に、他システムのコントローラ(不図示)から車速Vdやヨーレートγを入力する。
更に、自動車Vは、メータ装置20と、表示制御コントローラ30と、運転支援装置40と、通信ネットワーク50と、を備える。
なお更に、自動車Vは、ドライバが踏み込み操作可能なブレーキペダル16と、ブレーキペダル16の踏み込み量Bdを検出するブレーキ操作検出装置17と、を備える。
運転支援装置40は、各種運転支援制御を実施する複数の制御システム(不図示)を備えている。運転支援装置40は、自動車1の制駆動力を制御したり、変速機(CVT)のギアレシオを制御したり、SBWシステムを制御したりすることで各種運転支援制御を実施する。
更に、運転支援装置40は、各種運転支援制御の作動状態を示す作動フラグを生成し、生成した作動フラグを、通信ネットワーク50を介して表示制御コントローラ30に送信する。ここで、作動フラグは、各種運転支援制御に対してそれぞれ設定する。そして、各作動フラグは、運転支援制御の作動中にON(信号がハイレベル)となり、運転支援制御の非作動中にOFF(信号がローレベル)となるフラグである。
(1)ATC(Active Trace Control)
(2)AEB(Active Engine Brake)
(3)ARC(Active Ride Control)
(4)HSA(Hill Start Assist)
(5)HDC(Hill Descent Control)
(6)SMB(Side Magic Bumper)
AEBは、運転者の操舵状態や複数のセンサ検出値に基づき検出した自動車Vの運転状態に応じて、変速機のギアレシオを制御することで減速度を付加してコーナー等のカーブ路を走行時の運転負荷(運転者のペダル踏み替え操作)を低減する運転支援制御である。
ARCは、自動車Vの比較的大入力となる凹凸を乗り越し後の上屋の動きの収斂性をブレーキ制御によって向上する運転支援制御である。
HDCは、エンジンブレーキだけでは減速できない急勾配の下り坂や、雪道のような滑りやすい路面の下り坂を一定の車速(4[km/h]~15[km/h]で設定可能)で下ることができるように制駆動制御を行う運転支援制御である。
具体的に、図1に示すように、SMBの作動状態を示す作動フラグSMBと、ATCの作動状態を示す作動フラグATCと、AEBの作動状態を示す作動フラグAEBと、HSAの作動状態を示す作動フラグHSAと、HDCの作動状態を示す作動フラグHDCと、ARCの作動状態を示す作動フラグARCとを生成する。そして、生成した作動フラグSMB、ATC、AEB、HSA、HDC及びARCを、通信ネットワーク50を介して表示制御コントローラ30に送信する。
ここで、VDCシステムは、前・後輪の横滑りを感知して、各車輪のブレーキ力やエンジン出力を制御して自動車Vの安定性を向上させる制駆動制御(スタビリティ制御)を実施するシステムである。本実施形態において、VDCシステムは、供給されるブレーキペダル操作量に基づき、運転者のブレーキペダル16の踏み込み状態を示すBHS(Brake Hold State)情報を生成する。そして、生成したBHS情報を、通信ネットワーク50を介して表示制御コントローラ30に供給するようになっている。なお、BHS情報は、他システムから取得する構成としてもよい。
次に、図2及び図3に基づき、メータ装置20について説明する。
図2は、メータ装置20の構成例を示すブロック図である。図3は、メータ装置20の外観構成の一例を示す図である。
図2に示すように、メータ装置20は、第1メータ22と、第2メータ24と、液晶表示装置26と、メータ制御コントローラ28と、演出画像記憶メモリ29と、を備える。
第1メータ22は、自動車Vのエンジン回転数をメータ表示するタコメータ22aと、自動車Vの燃料の残量をメータ表示するフェールゲージ22bと、を含む構成となっている。
フェールゲージ22bは、メータ制御コントローラ28からの燃料の残量情報に基づき、燃料の残量をメモリ及びアルファベット(F,E)の付された文字盤と指針とによってアナログ表示する機械式のメータである。
第2メータ24は、自動車Vの車速をメータ表示するスピードメータ24aと、警告表示や運転支援制御の作動状態の表示等を行うインジケータ24bと、自動車Vのエンジンの冷却水の温度をメータ表示する水温メータ24cと、を含む構成となっている。
スピードメータ24aは、メータ制御コントローラ28からの自動車Vの速度情報に基づき、自動車Vの速度をメモリ及び数値の付された文字盤と指針とによってアナログ表示する機械式のメータである。
液晶表示装置26は、本実施形態において、TFT(Thin Film Transistor)液晶表示装置から構成している。この液晶表示装置26は、通信ネットワーク50及びメータ制御コントローラ28を介して受信した、メータ制御コントローラ28からの画像表示信号に基づき、運転支援装置40の実施する各種運転支援制御の作動状態を運転者に知らせるための画像(以下、支援状態表示用画像という)を表示する。
なお、液晶表示装置26は、TFT液晶表示装置に限らず、TFT液晶表示装置と同程度又はそれ以上の視認性を有する表示装置であれば、プラズマ表示装置、電界放出型表示装置、有機EL表示装置など他の表示装置から構成してもよい。また、上記した(1)~(6)の6種類の運転支援制御に対する支援状態表示用画像の詳細については後述する。
また、メータ制御コントローラ28は、受信した支援状態表示用画像の表示終了指令に基づき、演出画像記憶メモリ29から、運転支援制御が非作動であることを運転者に知らせるための支援状態表示用画像(以下、デフォルト画像という)の情報を読み出す。そして、読み出したデフォルト画像の画像表示信号を生成し、生成した画像表示信号を液晶表示装置26に送信する。
また、メータ制御コントローラ28は、受信したエンジン回転数及び燃料の残量の情報を第1メータ22に送信し、受信した車速及び冷却水の温度の情報を第2メータ24に送信する。また、メータ制御コントローラ28は、受信したインジケータ表示に係る情報を第2メータ24に送信する。
演出画像記憶メモリ29は、液晶表示装置26に表示する演出画像(支援状態表示用画像)を記憶するメモリである。本実施形態において、演出画像記憶メモリ29は、上記6種類の運転支援制御にそれぞれ対応して予め用意された演出画像を記憶している。なお、演出画像の詳細は後述する。
図1に戻って、表示制御コントローラ30は、メータ装置20の備える液晶表示装置26及びインジケータ24bの表示制御を行う。具体的に、表示制御コントローラ30は、運転支援装置40及び操舵角センサ3から通信ネットワーク50を介して受信した作動フラグ及び操舵角θsに基づき、運転支援装置40の作動状態を運転者に知らせるための支援状態表示用画像を液晶表示装置26に表示する表示制御を行う。更に、本実施形態では、運転支援制御の1つであるHSAの作動時において、インジケータ24bのHSA用インジケータランプの表示制御を行う。
図4は、表示制御コントローラ30の具体的な構成の一例を示すブロック図である。
表示制御コントローラ30は、図4に示すように、表示制御用ECU300と、演出情報記憶用メモリ302と、表示時間測定用タイマ304と、を備える。
表示制御用ECU300は、入力処理部300Aと、表示制御部300Bと、を含む構成となっている。また、表示制御部300Bは、表示時間遅延処理部300Cと、出力信号処理部300Dと、を含む構成となっている。
入力処理部300Aは、運転支援装置40からの各種運転支援制御の作動フラグを、通信ネットワーク50を介して受信する。更に、入力処理部300Aは、操舵角センサ3からの操舵角θsを、通信ネットワーク50を介して受信する。そして、入力処理部300Aは、受信した作動フラグを表示時間遅延処理部300Cに入力する。
ここで、操舵方向情報は、左操舵フラグ及び右操舵フラグの情報を含む。
左操舵フラグは、ON状態(例えば、信号レベルがハイレベル)のときに、左操舵が行われていることを示すフラグであり、OFF状態(例えば、信号レベルがローレベル)のときに左操舵が行われていないことを示すフラグである。
また、左操舵フラグ及び右操舵フラグが双方ともOFF状態のときは、ステアリングホイール1が中立位置にあることを示す。
また、入力処理部300Aは、運転支援装置40からのBHS情報と、作動フラグHSAと、他システムからの車速Vdとを通信ネットワーク50を介して受信する。そして、受信したBHS情報、作動フラグHSA及び車速Vdに基づきHSA用の支援状態表示用画像の表示指令及びHSA用のインジケータランプの表示指令を含むHSA用演出表示指令を、通信ネットワーク50を介してメータ装置20に送信する。
表示時間遅延処理部300Cは、演出情報記憶用メモリ302から取得した最低表示時間情報と、供給される作動フラグとを出力信号処理部300Dに入力する。
出力信号処理部300Dは、入力された最低表示時間情報及び作動フラグと、入力された操舵方向情報とに基づき、演出情報記憶用メモリ302から、該当する運転支援制御に対応する支援状態表示用画像の表示パターン情報を読み出す。そして、読み出した表示パターン情報と、表示時間測定用タイマ304のカウント値とに基づき、演出表示指令を生成し、生成した演出表示指令を、通信ネットワーク50を介してメータ装置20に送信する。
出力信号処理部300Dは、作動フラグがON状態になったと判定すると、該当する運転支援制御の支援状態表示用画像の表示開始指令を、通信ネットワーク50を介してメータ装置20に送信する。更に、表示開始指令を送信後に、表示時間測定用タイマ304にカウント動作を開始させて、支援状態表示用画像の表示時間を測定する。
具体的に、出力信号処理部300Dは、作動フラグがOFF状態(全ての作動フラグがOFF状態)でかつ支援状態表示用画像の表示時間が最低表示時間を経過したと判定すると、表示終了タイミングであると判定する。
出力信号処理部300Dは、表示終了タイミングであると判定すると、表示終了指令を、通信ネットワーク50を介してメータ装置20に送信する。つまり、出力信号処理部300Dは、作動している運転支援制御が1つも無いと判定して、液晶表示装置26にデフォルト画像を表示させる。
ここで、表示切替指令は、現在表示中の支援状態表示用画像を、作動フラグがON状態となった他の運転支援制御の支援状態表示用画像に切り替えて表示させる表示指令である。
表示時間測定用タイマ304は、出力信号処理部300Dからのリセット指令に応じてカウント値をリセットし、出力信号処理部300Dからのカウント開始指令に応じてカウントを開始するタイマカウンタである。そして、表示時間測定用タイマ304は、カウントしたカウント値を出力信号処理部300Dに入力する。
次に、図5~図11に基づき、上記6種類の運転支援制御にそれぞれ対応する支援状態表示用画像について説明する。
(表示画面の構成及びデフォルト画像)
まず、図5に基づき、液晶表示装置26の表示画面の構成及び運転支援制御の非作動時に表示するデフォルト画像について説明する。図5は、液晶表示装置26の表示画面の一例及びデフォルト画像の一例を示す図である。
図5に示すように、液晶表示装置26の表示画面260は、画像上で表示領域が、第1表示領域260Aと、第2表示領域260Bと、第3表示領域260Cと、第4表示領域260Dとの4つの領域に区分されている。
第2表示領域260Bは、レーンキープアシスト制御、車間維持制御等の作動状態、定速走行制御の車速設定値等の情報を表示する領域である。
第3表示領域260Cは、支援状態表示用画像を表示する領域である。
第4表示領域260Dは、シフトポジション、走行モード、オドメータの測定値及びトリップメータの測定値等の情報を表示する領域である。
図5に示すように、第3表示領域260Cには、デフォルト画像261DFが表示されている。
デフォルト画像261DFは、運転支援制御が1つも作動していないときに表示する画像であり、図5に示すように、メッシュ画像261aと、車両画像261bとを含む構成となっている。
車両画像261bは、例えば、自動車Vと同車種の車両を車両前後方向の後方側上方から見下した視点の画像である。
車両画像261bは、メッシュ画像261aの上に重畳表示されている。メッシュ画像261aは、車両画像261bの車両前後方向(遠近方向)に延在すると共に、該前後方向と直交する方向(以下、左右方向という)の幅(全体の幅及び格子の幅)が後方(近方)ほど広く、該幅が前方(遠方)ほど狭くなる形状を有している。車両画像261bは、メッシュ画像261aの前後方向及び左右方向の略中央に重畳表示されている。
また、デフォルト画像261DFを含む、以降の支援状態表示用画像は、図示の関係で、背景色が白色となっているが、黒色等の後述する発光して見える表示効果を活かせる背景色とすることが望ましい。
次に、図6及び図7に基づき、運転支援制御ATC又はAEBの作動時に表示する支援状態表示用画像について説明する。図6(a)及び(b)は、制御介入時表示画像の一例を示す図である。図7(a)及び(b)は、シーン別演出画像の一例を示す図である。図7(a)は、左操舵判定時のシーン別演出画像(以下、左操舵演出画像という)の一例を示す図であり、(b)は、右操舵判定時のシーン別演出画像(以下、右操舵演出画像という)の一例を示す図である。
また、図7(b)に示す右操舵演出画像261RCは、作動フラグATC又はAEBがON状態で且つ右操舵フラグがON状態のときに表示する支援状態表示用画像である。右操舵演出画像261RCは、図5のメッシュ画像261aを、右にカーブした形状に変形した右カーブメッシュ画像261dと、車両画像261bと、車輪画像263FL、263FR、263BL及び263BRとを含む構成となっている。右操舵演出画像261RCは、車両画像261b周辺の車体左側に、円弧部分が左外側を向く半円状の効果表示領域264LRが設けられている。更に、右操舵演出画像261RCは、車両画像261b周辺の車体右側に、円弧部分が右外側を向く半円状の効果表示領域264RRが設けられている。
なお、右操舵演出画像261RCは、左操舵演出画像261LCを左右対称にした画像であり、左操舵演出画像261LCと同様の効果表示を行う。
次に、図8に基づき、運転支援制御ARCの作動時に表示する支援状態表示用画像について説明する。図8は、ARC用の支援状態表示用画像である演出画像261ARCの一例を示す図である。
図8に示す演出画像261ARCは、作動フラグARCがON状態のときに表示する支援状態表示用画像である。演出画像261ARCは、図8に示すように、メッシュ画像261aと、車両画像261bと、車輪画像263FL、263FR、263BL及び263BRと、効果表示領域265と、を含む構成となっている。
本実施形態では、効果表示領域265で囲まれた領域内の格子を形成する線の色を発光して見える表示効果を奏する表示色で表示する。
更に、演出画像261ARCにおける車輪画像263FL、263FR、263BL及び263BRを4輪点灯表示する。
ここで、上記運転支援制御ARCは、路上の凹凸乗り越しによる上屋の上下挙動や左右挙動等の動きを素早く収束させることで、凹凸乗り越しによる乗り心地の悪化を低減する制御である。つまり、車両画像261b周囲の効果表示領域265内のラインを光らせることで領域内の路面が整地であるかのような安心感を運転者に与える表示効果を狙っている。
次に、図9に基づき、運転支援制御SMBの作動時に表示する支援状態表示用画像について説明する。図9(a)~(d)は、SMB用の支援状態表示用画像である演出画像SMBの一例を示す図である。
図9(a)~(d)に示す演出画像261SMB1~261SMB5は、作動フラグSMBがON状態のときに表示する支援状態表示用画像である。
演出画像261SMB1は、図9(a)に示すように、HP形メッシュ画像261hと、車両画像261bと、を含む構成となっている。
HP形メッシュ画像261hは、図5に示すメッシュ画像261aの左右両端を持ち上げるようにしてRを付けて折り曲げたハーフパイプ形状の画像である。かかる形状とすることで、車両画像261bの左右両側に壁を形成している。
本実施形態では、上記演出画像SMB1~261SMB5について、遠近方向に車両画像261bに近いほど輝度(又は明度)が高くなるようにし、遠いほど輝度(又は明度)が低くなるように発光表示を行う。
具体的に、運転者が運転支援制御SMBを作動させるためのSMBスイッチ(不図示)をONにすることで作動フラグSMBがON状態となる。これにより、表示制御コントローラ30は、液晶表示装置26の第3表示領域260Cの表示画像を、演出画像261SMB1に切り替える表示制御を行う。引き続き、表示制御コントローラ30は、演出画像261SMB1→演出画像261SMB2→演出画像261SMB3→演出画像261SMB4→演出画像261SMB5の順にこれら演出画像を表示する表示制御を行う。これにより、車両画像261bに近い方から順に発光していくアニメーション表示が行われ、車両画像261bの左右両側が発光する壁に囲まれた状態となる。その後、運転者がSMBスイッチをOFFにすることで作動フラグSMBがOFF状態になる。これにより、表示制御コントローラ30は、液晶表示装置26の第3表示領域260Cに、演出画像261SMB5→演出画像261SMB4→演出画像261SMB3→演出画像261SMB2→演出画像261SMB1の順にこれら演出画像を表示する表示制御を行う。これにより、メッシュ画像261aの左右外側から内側へと向けて消灯していくアニメーション表示が行われる。その後、表示制御コントローラ30は、液晶表示装置26の第3表示領域260Cに、デフォルト画像261DFを表示する表示制御を行う。
次に、図10に基づき運転支援制御HSAの作動時に表示する支援状態表示用画像について説明する。図10(a)及び(b)は、HSA用の支援状態表示用画像である演出画像261HSAの一例を示す図である。
図10(a)に示す演出画像261HSA(S)は、作動フラグHSAがON状態で且つブレーキペダル16が踏み込まれている状態(以下、BH(Brake Hold)状態という)のときに表示する支援状態表示用画像である。
以下、演出画像261HSA(S)と、演出画像261HSA(O)とを区別しない場合は、単に、演出画像261HSAという。
演出画像261HSAは、図10(a)及び(b)に示すように、メッシュ画像261eと、車両画像261fと、車輪画像263SFL及び263SBLと、上り坂表示線266と、を含む構成となっている。
車両画像261fは、例えば、自動車Vと同車種の車両を左側面から正面視した視点の該車両の側面画像であり、メッシュ画像261e上に重畳表示されている。
車輪画像263SFLは、車両画像261fにおける左前輪の画像である。
車輪画像263SBLは、車両画像261fにおける左後輪の画像である。
上り坂表示線266は、第3表示領域260Cの画面右端の下方から画面左端に向かって斜め左上に伸びる直線(第3表示領域260Cの下辺に対して例えば15[°]の傾斜角度を有する直線)であり、横から見た上り坂を表現した線である。
従って、メッシュ画像261eは、第3表示領域260Cにおける上り坂表示線266を境にその路面側とは反対側の領域には表示せず、路面側の領域にのみ表示している。
更に、本実施形態において、表示制御コントローラ30は、演出画像261HSA(S)における車輪画像263SFL及び263SBLのタイヤ部分を、発光して見える表示効果を奏する表示色で表示する。以下、この表示態様を、車輪点灯表示という。
また、本実施形態において、表示制御コントローラ30は、図10(b)の下方に示すように、演出画像261HSA(O)の車輪点滅表示に合わせて、HSA用インジケータランプ240HSAを点滅表示する表示制御を行う。
次に、図11に基づき、運転支援制御HDCの作動時に表示する支援状態表示用画像について説明する。図11は、HDC用の支援状態表示用画像である演出画像261HDCの一例を示す図である。
図11に示す演出画像261HDCは、作動フラグHDCがON状態のときに表示する支援状態表示用画像である。なお、運転支援制御HDCは、例えば、自動車Vを4輪駆動状態に固定した上で専用のスイッチ(以下、HDCスイッチという)をON状態にすることで作動する。
演出画像261HDCは、図11に示すように、メッシュ画像261gと、車両画像261iと、車輪画像263SFL及び263SBLと、下り坂表示線267と、を含む構成となっている。
車両画像261iは、例えば、自動車Vと同車種の車両を左側面から正面視した視点の該車両の側面画像であり、メッシュ画像261g上に重畳表示されている。
下り坂表示線267は、第3表示領域260Cの画面左端の下方から画面右端に向かって斜め右上に伸びる波線(第3表示領域260Cの下辺に対して例えば15[°]の傾斜角度を有する波線)であり、横から見た路面状況の悪い下り坂を表現した線である。
従って、メッシュ画像261gは、第3表示領域260Cにおける下り坂表示線267を境にその路面側とは反対側の領域には表示せず、路面側の領域にのみ表示している。
更に、本実施形態において、表示制御コントローラ30は、演出画像261HDCにおける車輪画像263SFL及び263SBLのタイヤ部分を、発光して見える表示効果を奏する表示色で表示(車輪点灯表示)する。
以下、図12~図17に基づき、本実施形態の動作を説明する。
〔最低表示時間情報に基づく表示制御動作〕
図12に基づき、表示制御コントローラ30の最低表示時間情報に基づく支援状態表示用画像の表示制御時の動作について説明する。図12は、本実施形態の最低表示時間情報に基づく表示制御時の動作例を説明するためのタイムチャートである。
まず、図12中の(1)に示すように、運転支援制御Xの作動フラグXがON状態となる時間、即ち運転支援制御Xの作動時間toxが、最低表示時間tminxよりも長い場合の動作例について説明する。なお、本実施形態において、運転支援制御Xは、運転支援制御ATC、AEB、ARC、SMB及びHDCのうちのいずれか1の制御となる。
なお、図12中(1)に示す例では、運転支援制御Xの作動時間toxが、最低表示時間tminxよりも長い。そのため、出力信号処理部300Dは、表示時間測定用タイマ304のカウント値が最低表示時間tminxを超えても演出画像Xの表示を終了せずに、図12中(1)及び(2)に示すように、作動フラグXがOFF状態となるまで、演出画像Xを表示し続けるように表示制御を行う。具体的に、出力信号処理部300Dは、入力された作動フラグXがOFF状態になったと判定すると、演出画像Xの表示終了指令を生成する。そして、生成した表示終了指令を、通信ネットワーク50を介してメータ装置20に送信する。
液晶表示装置26は、入力された画像表示信号DFに基づき、表示画面260にデフォルト画像261DFを表示する。
つまり、出力信号処理部300Dは、表示時間測定用タイマ304のカウント値が最低表示時間tminx以上になったと判定すると、演出画像Xの表示終了指令を生成する。そして、生成した表示終了指令を、通信ネットワーク50を介してメータ装置20に送信する。
図12中(5)及び(6)に示すように、運転支援制御Aが作動中に運転支援制御Bが作動すると、表示時間遅延処理部300Cでは、入力処理部300Aから入力された作動フラグAがON状態であると判定中に、作動フラグBがON状態になったと判定する。
表示時間遅延処理部300Cは、演出情報記憶メモリ302から、運転支援制御Bに対応する最低表示時間tminBを読み出す。そして、読み出した最低表示時間tminB及び入力された作動フラグを出力信号処理部300Dに入力する。
液晶表示装置26は、入力された画像表示信号Bに基づき、図12中の(8)に示すように、現在表示中の演出画像Aに代えて演出画像Bを表示する。
次に、図5~図7、図13及び図14に基づき、運転支援制御ATC又はAEBが作動時の表示制御動作について説明する。図13は、運転支援制御ATC又はAEBが作動時の表示制御動作の一例を説明するためのタイムチャートである。図14は、運転支援制御ATC又はAEBが作動する走行シーンの一例を示す図である。なお、図13及び図14において、時刻t2及びt4は同じ時刻を示している。
図13に示すように、時刻t1において、運転支援制御ATC又はAEBが作動して、作動フラグATC又はAEBがON状態になったとする。
この場合、表示時間遅延処理部300Cは、演出情報記憶メモリ302から、運転支援制御ATC又はAEBに対応する最低表示時間情報(ここでは、最低表示時間tminAとする)を読み出す。そして、読み出した最低表示時間tminA及び入力された作動フラグを出力信号処理部300Dに入力する。
これにより、液晶表示装置26の表示画面260には、現在表示中の図5に示すデフォルト画像261DFに代えて、図6に示す制御介入時表示画像261INが表示される。
これにより、液晶表示装置26の表示画面260には、現在表示中の制御介入時表示画像261INに代えて、図7(a)に示す左操舵演出画像261LCが表示される。
これにより、液晶表示装置26の表示画面260には、現在表示中の左操舵演出画像261LCに代えて、図6に示す制御介入時表示画像261INが表示される。
これにより、液晶表示装置26の表示画面260には、現在表示中の制御介入時表示画像261INに代えて、図7(b)に示す右操舵演出画像261RCが表示される。
これにより、液晶表示装置26の表示画面260には、現在表示中の右操舵演出画像261RCに代えて、図6に示す制御介入時表示画像261INが表示される。
これにより、液晶表示装置26の表示画面260には、現在表示中の制御介入時表示画像261INに代えて、図5に示すデフォルト画像261DFが表示される。
以上のように、本実施形態では、作動フラグATC又はAEBが作動すると、制御介入時表示画像261IN、左操舵演出画像261LC及び右操舵演出画像261RCの3枚の画像を切り替え表示することで、運転者に運転支援制御ATC又はAEBが作動していることを知らせる。
次に、図9及び図15に基づき、運転支援制御SMBが作動時の表示制御動作について説明する。図15は、運転支援制御SMBが作動時の表示制御動作の一例を説明するためのタイムチャートである。
図15に示すように、時刻t1において、SMBスイッチをONにすることで作動フラグSMBがON状態となる。
これにより、表示時間遅延処理部300Cは、演出情報記憶メモリ302から、運転支援制御SMBに対応する最低表示時間情報(ここでは、最低表示時間tminSとする)を読み出す。そして、読み出した最低表示時間tminS及び入力された作動フラグを出力信号処理部300Dに入力する。
具体的に、時刻t1において、出力信号処理部300Dは、演出画像261SMB1の表示開始指令SMB1を生成する。そして、生成した表示開始指令SMB1を、通信ネットワーク50を介してメータ装置20に送信する。一方、出力信号処理部300Dは、表示時間測定用タイマ304にカウント動作の開始指令を出力して、表示時間測定用タイマ304によるカウント動作を開始する。
更に、メータ制御コントローラ28は、他のコントローラや計器等から、通信ネットワーク50を介して、表示画面260の第1表示領域260A、第2表示領域260B及び第4表示領域260Dに表示する各種情報を取得する。そして、読み出した演出画像SMB1の情報と取得した各種情報とに基づき表示画面260に表示する画像の画像表示信号SMB1を生成し、生成した画像表示信号SMB1を液晶表示装置26に入力する。
これにより、液晶表示装置26の表示画面260には、図9(a)に示す演出画像261SMB1が表示される。
これにより、液晶表示装置26の表示画面260には、図9(a)に示す演出画像261SMB1に代えて、図9(b)に示す演出画像261SMB2が表示される。
これにより、液晶表示装置26の表示画面260には、図9(b)に示す演出画像261SMB2に代えて、図9(c)に示す演出画像261SMB3が表示される。
引き続き、出力信号処理部300Dは、表示時間測定用タイマ304のカウント値に基づき、図15に示す時刻t3から予め設定した表示時間が経過後の時刻t4において、演出画像261SMB4の表示開始指令SMB4を生成する。そして、生成した表示開始指令SMB4を、通信ネットワーク50を介してメータ装置20に送信する。
これにより、液晶表示装置26の表示画面260には、図9(c)に示す演出画像261SMB3に代えて、図9(d)に示す演出画像261SMB4が表示される。
これにより、液晶表示装置26の表示画面260には、図9(d)に示す演出画像261SMB4に代えて、図9(e)に示す演出画像261SMB5が表示される。
つまり、演出画像261SMB1~261SMB5を、予め設定した表示時間間隔で、演出画像261SMB1→演出画像261SMB2→演出画像261SMB3→演出画像261SMB4→演出画像261SMB5の順番に連続表示する。これにより、左側効果表示領域AL1~AL4及び右側効果表示領域AR1~AR4を、車両画像261bに近い方から順に発光表示していくアニメーション表示を行う。
その後、運転者がSMBスイッチをOFFにすると、図15に示すように、時刻t6において、作動フラグSMBがOFF状態となる。
これにより、出力信号処理部300Dは、入力される作動フラグSMBがOFF状態になったと判定する。そして、出力信号処理部300Dは、今度は、演出画像261SMB1~SMB5を、予め設定した表示時間間隔で、演出画像261SMB5→演出画像261SMB4→演出画像261SMB3→演出画像261SMB2→演出画像261SMB1の順番に連続表示する表示制御を行う。
これにより、液晶表示装置26の表示画面260には、図9(e)に示す演出画像261SMB5に代えて、図9(d)に示す演出画像261SMB4が表示される。
これにより、液晶表示装置26の表示画面260には、図9(d)に示す演出画像261SMB4に代えて、図9(c)に示す演出画像261SMB3が表示される。
これにより、液晶表示装置26の表示画面260には、図9(c)に示す演出画像261SMB3に代えて、図9(b)に示す演出画像261SMB2が表示される。
これにより、液晶表示装置26の表示画面260には、図9(b)に示す演出画像261SMB2に代えて、図9(a)に示す演出画像261SMB1が表示される。
これにより、液晶表示装置26の表示画面260には、図9(a)に示す演出画像261SMB1に代えて、図5に示すデフォルト画像261DFが表示される。
次に、図16及び図17に基づき、運転支援制御HSAが作動時の表示制御動作について説明する。図16は、運転支援制御HSAの作動シーンにおける、車速Vd、ブレーキペダル操作量Bd、ブレーキ液圧及び作動フラグHSAの時間変化の一例を示す図である。図17は、運転支援制御HSAの作動シーンにおける、自動車Vの走行状態及び運転者のペダル操作状態の推移に対する表示画面260の表示内容及びHSA用インジケータランプ240HSAの点灯状態の推移の一例を示す図である。
ここで、本実施形態において、表示制御コントローラ30の作動フラグに基づく運転支援制御の作動状態の判定機能は、作動状態判定部に対応する。表示制御コントローラ30の支援状態表示用画像の表示機能は、表示制御部に対応する。入力処理部300Aにおける操舵方向の検出機能は、操舵方向検出部に対応する。
本実施形態であれば、以下に記載する効果を奏することが可能となる。
(1)表示制御コントローラ30が、車載の運転支援装置40が実施する運転支援制御の作動状態を検出する。表示制御コントローラ30が、所定形状の平面画像である背景画像(例えばメッシュ画像261a)上に車両画像261bを重ねた構成の画像である支援状態表示用画像を、メータ装置20のメータパネル21内に設けられた液晶表示装置26に表示する。表示制御コントローラ30が、運転支援制御が作動したと判定すると、液晶表示装置26に表示する支援状態表示用画像のメッシュ画像261aの表示態様を、予め設定した表示態様に変更する表示制御を行う。
これにより、メッシュ状の平面画像やグラデーション画像等の表示態様の変化によって、運転支援制御の作動状態を表示することが可能となる。その結果、運転者が表示内容の変化をより捉えやすい画像表示を行うことが可能となる。
背景画像(メッシュ画像261a)を、車両画像261bの車両前後方向を遠近方向として該遠近方向に延在すると共に、近方ほど遠近方向と直交する方向の幅が広くなりかつ遠方ほど該幅が狭くなる形状の画像とした。
これにより、背景画像上を車両が遠方に向かって走行する構図となり、例えば、背景画像を車両の旋回方向に曲がった形状に変形するなど、背景画像を道路と見立てた表示態様での表示が可能となる。従って、運転負荷が比較的大きい状況でも、運転支援制御が作動していることを、運転者に、より煩わしさを感じさせることなく的確に知らせることが可能となる。
つまり、運転支援制御が作動していることを、背景画像部分の表示色の変更によって運転者に知らせるようにしたので、運転者は表示内容を注視しなくても、瞬間的な視線移動や周辺視野によって容易に表示内容の変化を捉えることが可能となる。これにより、運転者は、表示内容を注視しなくても運転支援制御が作動していることを容易に認知することが可能となる。
つまり、自動車Vがカーブ路を走行中などの作動シーンが明確な運転支援制御については、車両画像周辺の表示色の変更に加えて、背景画像部分を作動シーンに合わせた形状に変化させるようにした。これにより、運転者は表示内容を注視しなくても、瞬間的な視線移動や周辺視野によって、より容易に表示内容の変化を捉えることが可能となる。従って、運転者は、表示内容を注視しなくても運転支援制御が作動中であることを、より容易に認知することが可能となる。
つまり、表示色の変更によるアニメーション表示によって、車両画像の両側に段々と壁が形成される演出表示を行うようにした。これにより、運転者は表示内容を注視しなくても、周辺視野によって容易に表示内容の変化を捉えることができると共に、どのような運転支援制御が作動したのかを容易に認知することが可能となる。
つまり、背景画像の車両画像から予め設定した距離範囲の画像部分を、発光して見える表示効果を奏する色(例えば、他の領域の色と比較して高輝度又は高明度の色)に変更するようにした。これにより、運転者は表示内容を注視しなくても、周辺視野によって容易に表示内容の変化を捉えることができるので、運転支援制御が作動中であることを容易に把握することが可能となる。
ここで、運転支援制御の作動時間は、様々であり、作動状況によっては比較的短い時間だけ作動する場合もある。このような、比較的短時間しか作動しない運転支援制御に対して、支援状態表示用画像を短時間だけ表示すると、支援状態表示用画像が瞬間的に表示されることになる。このような表示は、運転者にとって何が表示されたのか認知できず煩わしい表示となる。
つまり、最低表示時間tminを、例えば、運転者が表示内容を認知するのに適切な時間に設定し、少なくとも該最低表示時間tminが経過するまでは、支援状態表示用画像の表示を継続して行う。これにより、運転者は、煩わしさを感じることなく、どのような運転支援制御が作動したのかを認知することが可能となる。
これにより、運転者は、煩わしさを感じることなく、どのような運転支援制御が作動したのかを認知することが可能となる。
運転支援制御の種別毎に最低表示時間tminを設定することで、例えば、運転負荷の比較的大きい運転支援制御については、支援状態表示用画像の表示時間を長くして視認性を高める等の柔軟な表示態様とすることが可能となる。
(12)表示制御コントローラ30が、車載の運転支援装置40が実施する運転支援制御の作動状態を検出する。表示制御コントローラ30が、運転支援制御が作動したと判定すると、該作動したことを運転者に知らせるための画像である支援状態表示用画像を表示装置に表示する表示制御を行う。表示制御コントローラ30が、運転支援制御が作動したと判定した時の運転負荷が比較的大きいと判定すると、背景画像(例えばメッシュ画像261a)上に車両を後方側上方から見下ろす視点から見た第1の車両画像(車両画像261bなど)を重ねた構成の高負荷時支援状態表示用画像を表示すると共に、背景画像部分の表示態様を、予め設定した表示態様で表示する表示制御を行う。表示制御コントローラ30が、運転支援制御が作動したと判定した時の運転負荷が比較的小さいと判定すると、車両の側面を正面視する視点から該車両を見た第2の車両画像(車両画像261f又は261h)を含む低負荷時支援状態表示用画像(演出画像261HSA又は261HDC)を表示すると共に、第2の車両画像の車輪部分の表示態様を、予め設定した表示態様で表示する表示制御を行う。
これにより、運転者は、液晶表示装置26の表示画面260を見ることで、坂道において作動する運転支援制御が作動していることを容易に認識することが可能となる。
次に、本発明の第2実施形態を図面に基づき説明する。図18~図20は、本発明の第2実施形態に係る車両用表示制御装置及び車両用表示制御方法の実施形態を示す図である。
(構成)
上記第1実施形態では、ある運転支援制御が作動中に別の運転支援制御が後から作動した場合に、現在表示している第1の支援状態表示用画像を、後から作動した運転支援制御に対応する第2の支援状態表示用画像にすぐに切り替えて表示する構成とした。これに対して、本実施形態では、先に表示している第1の支援状態表示用画像の表示時間が予め設定した切替表示時間を経過していないと判定すると、該切替表示時間が経過するまで第1の支援状態表示用画像の表示を継続して行う。その後、第2の支援状態表示用画像を表示する点が上記第1実施形態と異なる。
なお、上記第1実施形態と同様の構成には同じ符号を付し、その重複する説明は省略する。
本実施形態の表示制御コントローラ30は、図18に示すように、表示制御用ECU300と、演出情報記憶用メモリ302と、表示時間測定用タイマ304と、作動順番記憶用メモリ306と、を備える。
作動順番記憶用メモリ306は、運転支援制御の作動順番を記憶するメモリである。
表示制御用ECU300は、入力処理部300Aと、表示制御部300Bと、を含む構成となっている。また、本実施形態において表示制御部300Bは、表示時間遅延処理部300Cと、出力信号処理部300Dと、順番決定部300Eと、を含む構成となっている。
順番決定部300Eは、表示時間遅延処理部300Cから入力された作動フラグに基づき、運転支援制御の作動順番を作動順番記憶用メモリ306に記憶する。そして、記憶した作動順番に基づき、各運転支援制御に対応する支援状態表示用画像の表示順番を決定する。
本実施形態において、順番決定部300Eは、運転支援制御が1つだけ作動中である場合と、1つも作動していない場合とに、そのことを示す情報を出力信号処理部300Dに入力する。
更に、順番決定部300Eは、2種類以上の運転支援制御が同時に作動した場合に、運転支援制御の作動条件に応じて表示順番を決定する。順番決定部300Eは、決定した表示順番の情報を、出力信号処理部300Dに入力する。
まず、第2の運転支援制御の作動時間が最低表示時間tmin以下の場合を説明する。この場合に、更に、第2の運転支援制御が作動してから最低表示時間tminが経過するまでの時間に対して、第2の支援状態表示用画像の表示を開始してから該最低表示時間tminが経過するまでの時間(以下、第2表示時間tsh2という)が、第2の切替表示時間tsw2よりも短いとする。この場合、出力信号処理部300Dは、第2の切替表示時間tsw2が経過するまで、第2の支援状態表示用画像を継続して表示する表示制御を行う。
一方、第2表示時間tsh2が、第2の切替表示時間tsw2以上の時間である場合、本実施形態において、出力信号処理部300Dは、第2の支援状態表示用画像を第2表示時間tsh2が経過するまで表示する表示制御を行う。
なお、第2の支援状態表示用画像を、少なくとも第2の切替表示時間tsw2以上表示する構成に限らず、少なくとも第2の支援状態表示用画像を表示してから、第2の運転支援制御に対して予め設定された最低表示時間が経過するまで表示する構成としてもよい。
また、本実施形態において、切替表示時間の情報は、演出情報記憶メモリ302に記憶された表示パターン情報に含まれる。
本実施形態において、表示順番は、操作対応運転支援制御が先になるように決定されているため、出力信号処理部300Dは、操作対応運転支援制御に対応する支援状態表示用画像(以下、操作対応表示画像という)の表示制御を先に実施する。具体的に、出力信号処理部300Dは、まず先に、操作対応表示画像を、操作対応運転支援制御に対して予め設定された最低表示時間が経過するまで表示する表示制御を行う。その後、外乱対応運転支援制御に対応する支援状態表示用画像(以下、外乱対応表示画像という)の表示制御を実施する。具体的に、本実施形態では、外乱対応表示画像を、外乱対応運転支援制御に対して予め設定された最低表示時間が経過するまで表示する表示制御を行う。
以下、図19~図20に基づき、本実施形態の動作例を説明する。
〔連続作動時の表示制御動作〕
図19に基づき、運転支援制御が連続して重なって作動した場合の表示制御動作について説明する。図19は、運転支援制御が連続して重なって作動した場合の表示制御動作の一例を説明するためのタイムチャートである。
まず、図19中の(1)に示すように、運転支援制御Aの作動フラグAがON状態となると、表示時間遅延処理部300Cは、演出情報記憶メモリ302から、最低表示時間情報として運転支援制御Aに対応する最低表示時間tminAを読み出す。なお、本実施形態において、運転支援制御Aは、運転支援制御ATC、AEB、ARC、SMB及びHDCのうちのいずれか1の制御となる。
順番決定部300Eは、入力された作動フラグに基づき、運転支援制御の作動順番を作動順番記憶用メモリ306に記憶する。図19中(1)に示すように、まず運転支援制御Aが作動しているので、順番決定部300Eは、運転支援制御Aの作動順番(1番)の情報を作動順番記憶用メモリ306に記憶する。そして、運転支援制御Aが作動していることを示す表示順番情報を、出力信号処理部300Dに入力する。
引き続き、図19中(3)に示すように、運転支援制御Aが作動中に運転支援制御Bの作動フラグBがON状態になると、表示時間遅延処理部300Cは、演出情報記憶メモリ302から、最低表示時間情報として運転支援制御Bに対応する最低表示時間tminBを読み出す。そして、読み出した最低表示時間tminBを出力信号処理部300Dに入力する。更に、表示時間遅延処理部300Cは、入力された作動フラグを順番決定部300Eに入力する。
出力信号処理部300Dは、順番決定部300Eから入力された表示順番の情報に基づき、運転支援制御Aの作動中に運転支援制御Bが作動状態になったと判定すると、演出情報記憶メモリ302から運転支援制御Bに対応する表示パターン情報Bを読み出す。
図19中の(1)~(4)の例では、運転支援制御Bの作動開始時刻t1から最低表示時間tminAが経過時の時刻が時刻t3となっている。そして、演出画像Bの表示開始時刻t2から時刻t3までの時間、即ち演出画像Bの表示時間tshBが、運転支援制御Bに対して予め設定された切替表示時間tswB以上となっている。
従って、出力信号処理部300Dは、表示時間tshBが経過するまで演出画像Bを表示する表示制御を行う。即ち、出力信号処理部300Dは、演出画像Bの表示時間が表示時間tshBを経過したと判定すると、演出画像Bの表示終了指令を生成する。そして、生成した表示終了指令を、通信ネットワーク50を介してメータ装置20に送信する。
液晶表示装置26は、入力された画像表示信号DFに基づき、表示画面260に演出画像Bに代えてデフォルト画像261DFを表示する。
このような場合、出力信号処理部300Dは、表示開始時刻t5から切替表示時間tswBが経過するまで、即ち時刻t5から時刻t7まで演出画像Bを継続して表示する表示制御を行う。
次に、図20に基づき、操作対応運転支援制御と外乱対応運転支援制御とが同時に作動した場合の表示制御動作について説明する。図20は、操作対応運転支援制御と外乱対応運転支援制御とが同時に作動した場合の表示制御動作の一例を説明するためのタイムチャートである。
なお、以下、操作対応運転支援制御の作動フラグを操作対応作動フラグといい、外乱対応運転支援制御の作動フラグを外乱対応作動フラグという。
順番決定部300Eは、入力された作動フラグに基づき、運転支援制御の作動順番を作動順番記憶用メモリ306に記憶する。この場合は同時となるので、順番決定部300Eは、操作対応運転支援制御Cと外乱対応運転支援制御Dとが同時作動であることを示す作動順番情報を作動順番記憶用メモリ306に記憶する。更に、順番決定部300Eは、記憶した作動順番情報に基づき、操作対応運転支援制御Cを1番とし、外乱対応運転支援制御Dを2番とした表示順番情報を生成し、生成した表示順番情報を出力信号処理部300Dに入力する。
図20の例では、操作対応運転支援制御Cの作動時間toCが、最低表示時間tminCよりも短いため、出力信号処理部300Dは、操作対応運転支援制御Cが終了後も、最低表示時間tminCが経過するまで演出画像Cを継続して表示する表示制御を行う。
図20の例では、外乱対応運転支援制御Dの作動時間toDが、最低表示時間tminDよりも短いため、出力信号処理部300Dは、外乱対応運転支援制御Dが終了後も、最低表示時間tminDが経過するまで演出画像Dを継続して表示する表示制御を行う。
メータ装置20のメータ制御コントローラ28は、出力信号処理部300Dからの表示終了指令を受信すると、演出画像記憶メモリ29から、デフォルト画像261DFの情報を読み出す。更に、メータ制御コントローラ28は、他のコントローラや計器等から、通信ネットワーク50を介して、上記第1表示領域260A、第2表示領域260B及び第4表示領域260Dに表示する各種情報を取得する。そして、読み出したデフォルト画像261DFの情報と取得した各種情報とに基づき表示画面260に表示する画像の画像表示信号DFを生成し、生成した画像表示信号DFを液晶表示装置26に入力する。
ここで、本実施形態において、表示制御コントローラ30の作動フラグに基づく運転支援制御の作動状態の判定機能は、作動状態判定部に対応する。表示制御コントローラ30の支援状態表示用画像の表示制御機能は、表示制御部に対応する。入力処理部300Aにおける操舵方向の検出機能は、操舵方向検出部に対応する。
本実施形態であれば、上記第1実施形態の効果に加え、以下に記載する効果を奏することが可能となる。
(1)表示制御コントローラ30が、車載の運転支援装置40が実施する運転支援制御が作動中であると判定すると、該作動中であることを運転者に知らせるための画像である支援状態表示用画像をメータ装置20のメータパネル21内に設けられた液晶表示装置26に表示する。表示制御コントローラ30が、第1の運転支援制御が作動中に該第1の運転支援制御とは異なる第2の運転支援制御が作動したと判定し、かつ、先に表示している第1の運転支援制御に対応する第1の支援状態表示用画像の表示時間が予め設定した切替表示時間tswを経過していないと判定すると、該第1の支援状態表示用画像を切替表示時間tswが経過するまで継続して表示する表示制御を行い、該表示制御の実行後に第2の運転支援制御に対応する第2の支援状態表示用画像を表示する表示制御を行う。
これにより、第1の支援状態表示用画像を極短時間表示したタイミングで第2の運転支援制御が作動した場合でも、必ず切替表示時間tswが経過するまでは第1の支援状態表示用画像が表示される。従って、切替表示時間tswを適切な時間に設定することで、支援状態表示用画像の極短時間の表示状態が発生することを防ぐことが可能となり、かかる表示によって運転者に与える煩わしさを低減することが可能となる。
運転支援制御の種別毎に切替表示時間tswを設定することで、表示内容に合わせた時間設定が可能となり、各表示内容に対して適切な時間を設定することで、より煩わしさの低減した切替表示を行うことが可能となる。
(1)上記実施形態では、運転支援制御HSA及びHDCを比較的運転負荷が小さい状況で作動する制御として予め設定し、運転支援制御ATC、AEB、ARC及びSMBを比較的運転負荷が大きい状況で作動する制御として予め設定した。そして、運転負荷が比較的大きい状況で作動する運転支援制御と、運転負荷が比較的小さい状況で作動する運転支援制御とで、異なる視点から見た車両画像を含みかつ制御作動時の表示態様の異なる支援状態表示用画像を表示する構成とした。
この構成に限らず、例えば、表示制御コントローラ30が、自動車Vの車速Vdに基づき、車速Vdが予め設定した車速閾値以上であると判定すると、運転負荷が比較的大きいと判定し、車速Vdが車速閾値未満であると判定すると、運転負荷が比較的小さいと判定する。そして、この判定結果に基づき、運転負荷が比較的大きい状況で作動する運転支援制御と、運転負荷が比較的小さい状況で作動する運転支援制御とで、異なる視点から見た車両画像を含みかつ制御作動時の表示態様の異なる支援状態表示用画像を表示する構成としてもよい。
このことは、異なる運転支援制御間に対してだけでなく、同じ運転支援制御に対しても適用することが可能である。つまり、同じ運転支援制御でも運転負荷が比較的大きいときと、小さいときとで、表示する内容を運転負荷の大きさに応じた適切な内容に変更することが可能である。
この構成に限らず、例えば、表示制御コントローラ30が、自動車Vに搭載された傾斜角センサ(不図示)の検出値に基づき、走行路の勾配を検出する。そして、検出した勾配が予め設定した勾配閾値以上であると判定すると、運転負荷が比較的大きいと判定し、検出した勾配が勾配閾値未満であると判定すると、運転負荷が比較的小さいと判定する。そして、この判定結果に基づき、運転負荷が比較的大きい状況で作動する運転支援制御と、運転負荷が比較的小さい状況で作動する運転支援制御とで、異なる視点から見た車両画像を含みかつ制御作動時の表示態様の異なる支援状態表示用画像を表示する構成としてもよい。
このことは、異なる運転支援制御間に対してだけでなく、同じ運転支援制御に対しても適用することが可能である。つまり、同じ運転支援制御でも運転負荷が比較的大きいときと、小さいときとで、表示する内容を運転負荷の大きさに応じた適切な内容に変更することが可能である。
また、本発明は上記実施形態に限定されるものではなく、本発明の目的を達成できる範囲での変形、改良、均等物等は本発明に含まれるものである。
以上、本願が優先権を主張する日本国特許出願P2013-3631(2013年1月11日出願)の全内容は、ここに引用例として包含される。
ここでは、限られた数の実施形態を参照しながら説明したが、権利範囲はそれらに限定されるものではなく、上記の開示に基づく各実施形態の改変は当業者にとって自明のことである。
1:ステアリングホイール
3:操舵角センサ
16:ブレーキペダル
17:ブレーキ操作検出装置
20:メータ装置
21:メータパネル
22:第1メータ
24:第2メータ
24b:インジケータ
26:液晶表示装置
28:メータ制御コントローラ
29:演出画像記憶メモリ
30:表示制御コントローラ
40:運転支援装置
260:表示画面
260C:第3表示領域
261a,261e,261h:メッシュ画像
261b,261f:車両画像
261DF:デフォルト画像
261IN:制御介入時表示画像
261LC:左操舵演出画像
261RC:右操舵演出画像
261ARC,261SMB1~SMB5,261HSA(S),261HSA(O),261HDC:演出画像
300:表示制御用ECU
300A:入力処理部
300B:表示制御部
300C:表示時間遅延処理部
300D:出力信号処理部
300E:順番決定部
302:演出情報記憶用メモリ
304:表示時間測定用タイマ
Claims (9)
- 車載メータ装置のメータパネル内に設けられた表示装置の表示制御を行う車両用表示制御装置であって、
車載の運転支援装置が実施する運転支援制御の作動状態を検出する作動状態検出部と、
所定形状の平面画像である背景画像上に車両画像を重ねた構成の画像である支援状態表示用画像を前記表示装置に表示すると共に、前記作動状態検出部が検出した前記作動状態に基づき、前記運転支援制御が作動したと判定すると、前記表示装置に表示する前記支援状態表示用画像の前記背景画像部分の表示態様を、予め設定した表示態様に変更する表示制御を行う表示制御部と、を備えることを特徴とする車両用表示制御装置。 - 前記背景画像は、メッシュ状の画像であるメッシュ画像及びグラデーション画像を含むことを特徴とする請求項1に記載の車両用表示制御装置。
- 前記車両画像は、車両の後方側上方から該車両を見下ろした視点の画像であり、
前記背景画像は、前記車両画像の車両前後方向を遠近方向として該遠近方向に延在すると共に、近方ほど前記遠近方向と直交する方向の幅が広くなりかつ遠方ほど該幅が狭くなる形状の画像であることを特徴とする請求項1又は2に記載の車両用表示制御装置。 - 前記表示制御部は、前記作動状態検出部が検出した前記作動状態に基づき、前記運転支援制御が作動したと判定すると、前記支援状態表示用画像の前記車両画像部分から予め設定した距離範囲内の前記背景画像部分の表示色を、予め設定した表示色に変更する表示制御を行うことを特徴とする請求項2に記載の車両用表示制御装置。
- 操舵方向を検出する操舵方向検出部を更に備え、
前記表示制御部は、前記作動状態検出部が検出した前記作動状態に基づき、車両がカーブ路を走行中に作動する車両の各車輪の制駆動力を制御する運転支援制御が作動したと判定すると、前記表示装置に表示する前記支援状態表示用画像の前記背景画像部分の形状を、前記操舵方向検出部が検出した操舵方向に曲がるカーブ形状に変更する表示制御を行うことを特徴とする請求項4に記載の車両用表示制御装置。 - 前記表示制御部は、前記作動状態検出部が検出した前記作動状態に基づき、前記カーブ路を走行中に作動する運転支援制御の作動中は、前記支援状態表示用画像の前記車両画像部分における車輪位置に車輪形状の画像を重畳表示すると共に、該車輪形状の画像を予め設定した発光して見える表示効果を奏する表示色で表示する表示制御を行うことを特徴とする請求項5に記載の車両用表示制御装置。
- 前記表示制御部は、前記作動状態検出部が検出した前記作動状態に基づき、車両が直進路を走行中に作動する車両の操舵角に対する走行安定性を向上する運転支援制御が作動したと判定すると、前記表示装置に表示する前記支援状態表示用画像の前記背景画像の形状を、該背景画像の前記遠近方向と直交する方向の両端を持ち上げて前記車両画像の左右側面を囲む壁を形成したハーフパイプ形状に変更すると共に、該背景画像の前記車両画像から予め設定した距離範囲内にある画像部分を前記直交する方向に複数の領域に区分した複数の区分領域を、前記車両画像に近い側の区分領域から遠い側の区分領域に向かって順に現在の表示色を予め設定した他の色に変更する表示制御を行うことを特徴とする請求項4乃至6のいずれか1項に記載の車両用表示制御装置。
- 前記表示制御部は、前記車両画像部分から予め設定した距離範囲内の前記背景画像部分の表示色を、予め設定した発光して見える表示効果を奏する表示色に変更する表示制御を行うことを特徴とする請求項4乃至7のいずれか1項に記載の車両用表示制御装置。
- 車載メータ装置のメータパネル内に設けられた表示装置の表示制御を行う車両用表示制御方法であって、
所定形状の平面画像である背景画像上に車両画像を重ねた構成の画像である支援状態表示用画像を前記表示装置に表示すると共に、車載の運転支援装置の実施する運転支援制御が作動したと判定すると、前記表示装置に表示する前記支援状態表示用画像の前記背景画像部分の表示態様を、予め設定した表示態様に変更する表示制御を行うことを特徴とする車両用表示制御方法。
Priority Applications (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| BR112015016674-1A BR112015016674B1 (pt) | 2013-01-11 | 2013-12-27 | Dispositivo de controle de exibição para veículos e método de controle de exibição para veículos |
| RU2015133515A RU2643896C2 (ru) | 2013-01-11 | 2013-12-27 | Устройство управления отображением для транспортного средства и способ управления отображением для транспортного средства |
| MX2015008933A MX343132B (es) | 2013-01-11 | 2013-12-27 | Dispositivo de control de deslpliegue para vehiculo y metodo de control de despliegue para vehiculo. |
| EP13870776.5A EP2944497B1 (en) | 2013-01-11 | 2013-12-27 | Display control device for vehicle and display control method for vehicle |
| CN201380070222.4A CN104995054B (zh) | 2013-01-11 | 2013-12-27 | 车辆用显示控制装置和车辆用显示控制方法 |
| US14/760,405 US9701199B2 (en) | 2013-01-11 | 2013-12-27 | Display control device for vehicle and display control method for vehicle |
| JP2014556229A JP5930072B2 (ja) | 2013-01-11 | 2013-12-27 | 車両用表示制御装置及び車両用表示制御方法 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013003631 | 2013-01-11 | ||
| JP2013-003631 | 2013-01-11 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2014108987A1 true WO2014108987A1 (ja) | 2014-07-17 |
Family
ID=51166664
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/007703 WO2014108987A1 (ja) | 2013-01-11 | 2013-12-27 | 車両用表示制御装置及び車両用表示制御方法 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US9701199B2 (ja) |
| EP (1) | EP2944497B1 (ja) |
| JP (1) | JP5930072B2 (ja) |
| CN (1) | CN104995054B (ja) |
| BR (1) | BR112015016674B1 (ja) |
| MX (1) | MX343132B (ja) |
| MY (1) | MY178908A (ja) |
| RU (1) | RU2643896C2 (ja) |
| WO (1) | WO2014108987A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016031320A1 (ja) * | 2014-08-27 | 2016-03-03 | 本田技研工業株式会社 | 運転支援装置及び運転支援方法 |
| WO2016058651A1 (de) * | 2014-10-16 | 2016-04-21 | Daimler Ag | Verfahren und vorrichtung zur darstellung von inhalten in einer projektion eines headup-displays, vorzugsweise eines fahrzeuges |
| CN105539287A (zh) * | 2014-10-28 | 2016-05-04 | 爱信精机株式会社 | 周边监视装置 |
| WO2017065052A1 (ja) * | 2015-10-14 | 2017-04-20 | 株式会社東海理化電機製作所 | シフト装置 |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5895904B2 (ja) * | 2013-07-22 | 2016-03-30 | トヨタ自動車株式会社 | 車線維持支援装置 |
| JP6471453B2 (ja) * | 2014-10-22 | 2019-02-20 | 株式会社デンソー | 車両用情報表示装置 |
| US10890925B2 (en) * | 2014-12-05 | 2021-01-12 | Command Electronics, LLC | Vehicle leveling systems, devices and methods and computer program products for leveling vehicles using smart devices |
| JP6403093B2 (ja) * | 2015-02-04 | 2018-10-10 | 住友電気工業株式会社 | 複合材料、磁気部品用の磁性コア、リアクトル、コンバータ、及び電力変換装置 |
| JP6555474B2 (ja) * | 2015-09-01 | 2019-08-07 | 三菱自動車工業株式会社 | 車載情報処理装置 |
| JP6198181B2 (ja) * | 2015-11-06 | 2017-09-20 | マツダ株式会社 | 車両用挙動制御装置 |
| US11175659B2 (en) * | 2016-03-28 | 2021-11-16 | Nippon Seiki Co., Ltd. | Driving assistance system and display device |
| DE102016208947B4 (de) * | 2016-05-24 | 2022-05-25 | Siemens Healthcare Gmbh | CT-Detektor |
| JP2017214035A (ja) * | 2016-06-02 | 2017-12-07 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| CN109789779B (zh) * | 2016-09-16 | 2022-03-04 | 富士胶片株式会社 | 投影型显示装置及其控制方法 |
| CN109964101B (zh) * | 2016-11-08 | 2021-10-29 | 株式会社电装 | 车辆用显示装置 |
| MX2019007707A (es) | 2017-01-20 | 2020-02-07 | Polaris Inc | Sistemas y metodos de diagnostico de una transmision variable continuamente. |
| WO2018180122A1 (ja) * | 2017-03-30 | 2018-10-04 | ソニー株式会社 | 運転支援装置と運転支援方法 |
| WO2018181534A1 (ja) * | 2017-03-31 | 2018-10-04 | 住友建機株式会社 | ショベル、ショベルの表示装置及びショベルにおける画像の表示方法 |
| DE102017004012B3 (de) | 2017-04-25 | 2018-06-28 | Daimler Ag | Anzeigesystem für ein Fahrzeug und Fahrzeug mit einem Anzeigesystem |
| CN107244350A (zh) * | 2017-05-02 | 2017-10-13 | 江南大学 | 一种车轮偏转角度显示装置 |
| JP6460425B2 (ja) * | 2017-06-02 | 2019-01-30 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、およびプログラム |
| CN110816655B (zh) * | 2017-12-11 | 2021-07-20 | 中联农业机械股份有限公司 | 基于作业行的作业区域路径规划方法 |
| JP7444539B2 (ja) | 2019-01-17 | 2024-03-06 | トヨタ自動車株式会社 | 運転支援装置 |
| USD941322S1 (en) | 2019-02-08 | 2022-01-18 | Nissan Motor Co., Ltd. | Display screen or portion thereof with graphical user interface |
| USD941323S1 (en) | 2019-02-08 | 2022-01-18 | Nissan Motor Co., Ltd. | Display screen or portion thereof with graphical user interface |
| USD941321S1 (en) | 2019-02-08 | 2022-01-18 | Nissan Motor Co., Ltd. | Display screen or portion thereof with graphical user interface |
| JP7097911B2 (ja) | 2019-03-03 | 2022-07-08 | 広東美的制冷設備有限公司 | ウォーターポンプ、空調機用洗浄装置、壁掛型室内機及び空気調和機 |
| JP2020152161A (ja) * | 2019-03-18 | 2020-09-24 | 株式会社デンソー | 車両用表示制御装置、車両用表示制御方法、車両用表示制御プログラム |
| KR102173996B1 (ko) * | 2019-05-16 | 2020-11-04 | 주식회사 만도 | 조향 제어 장치와 그 방법, 및 조향 제어 시스템 |
| USD942482S1 (en) | 2019-08-06 | 2022-02-01 | Nissan Motor Co., Ltd. | Display screen or portion thereof with graphical user interface |
| RU2726105C1 (ru) * | 2019-11-25 | 2020-07-09 | Сергей Владимирович Бриндюк | Способ осуществления технологических операций выращивания сельскохозяйственных культур |
| FR3108083B1 (fr) * | 2020-03-10 | 2022-09-02 | Psa Automobiles Sa | Système de conduite automatisée avec dispositif d’information du conducteur. |
| US20220072954A1 (en) * | 2020-09-09 | 2022-03-10 | Toyota Motor Engineering & Manufacturing North America, Inc. | Animation to visualize wheel slip |
| CN112026780B (zh) * | 2020-09-17 | 2022-01-25 | 江苏理工学院 | 一种基于图像投影变化的车道偏离快速预警方法 |
| JP7145186B2 (ja) * | 2020-09-23 | 2022-09-30 | 本田技研工業株式会社 | 表示装置、表示制御方法、およびプログラム |
| WO2022109775A1 (zh) * | 2020-11-24 | 2022-06-02 | 华为技术有限公司 | 显示控制方法及终端设备 |
| US12118829B2 (en) | 2020-12-21 | 2024-10-15 | Toyota Motor North America, Inc. | Processing data from attached and affixed devices on transport |
| US11794764B2 (en) | 2020-12-21 | 2023-10-24 | Toyota Motor North America, Inc. | Approximating a time of an issue |
| US11554671B2 (en) | 2020-12-21 | 2023-01-17 | Toyota Motor North America, Inc. | Transport data display cognition |
| US20240070934A1 (en) * | 2022-08-30 | 2024-02-29 | Caterpillar Inc. | System and method for communicating traction device slippage |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11105728A (ja) * | 1997-10-02 | 1999-04-20 | Toyota Motor Corp | 車両用操舵制御装置 |
| JP2000344085A (ja) | 1999-06-03 | 2000-12-12 | Toyota Motor Corp | 車輪制御状態表示装置 |
| JP2005145434A (ja) * | 2003-10-21 | 2005-06-09 | Nippon Seiki Co Ltd | 車両用表示装置 |
| JP2006058064A (ja) * | 2004-08-18 | 2006-03-02 | Nippon Seiki Co Ltd | 車両用表示装置 |
| JP2010079425A (ja) * | 2008-09-24 | 2010-04-08 | Fuji Heavy Ind Ltd | 車両の運転支援装置 |
| JP2010139489A (ja) * | 2008-12-15 | 2010-06-24 | Mitsubishi Motors Corp | 車両の表示装置 |
| JP2011002290A (ja) * | 2009-06-17 | 2011-01-06 | Zenrin Datacom Co Ltd | 地図画像表示装置、地図画像表示方法、および、コンピュータプログラム |
| JP2011001049A (ja) * | 2009-05-21 | 2011-01-06 | Nissan Motor Co Ltd | 運転支援装置、及び運転支援方法 |
| JP2012216135A (ja) * | 2011-04-01 | 2012-11-08 | Olympus Corp | 画像生成システム、プログラム及び情報記憶媒体 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2773327B2 (ja) * | 1989-12-12 | 1998-07-09 | 三菱自動車工業株式会社 | 車両挙動表示装置 |
| US7366595B1 (en) * | 1999-06-25 | 2008-04-29 | Seiko Epson Corporation | Vehicle drive assist system |
| JP3632563B2 (ja) * | 1999-10-19 | 2005-03-23 | 株式会社豊田自動織機 | 映像位置関係補正装置、該映像位置関係補正装置を備えた操舵支援装置、及び映像位置関係補正方法 |
| JP4108314B2 (ja) * | 2001-10-31 | 2008-06-25 | トヨタ自動車株式会社 | 車両用周辺監視装置 |
| US8045003B2 (en) * | 2004-02-20 | 2011-10-25 | Sharp Kabushiki Kaisha | Onboard display device, vehicle, display method, image display program and recording medium |
| US7835854B2 (en) * | 2004-02-20 | 2010-11-16 | Sharp Kabushiki Kaisha | Condition detection and display system, condition detection and display method, control program for condition detection and display system, and storage medium storing the control program |
| EP1768866B1 (en) * | 2004-06-07 | 2013-04-24 | Sharp Kabushiki Kaisha | Display system for vehicle and vehicle |
| US20050280514A1 (en) * | 2004-06-21 | 2005-12-22 | Duc Doan | Apparatus for monitoring and displaying vehicular operational status |
| JP4740689B2 (ja) * | 2005-08-19 | 2011-08-03 | エイディシーテクノロジー株式会社 | 車載用画像表示装置及び車載用装置 |
| JP4997799B2 (ja) * | 2006-03-15 | 2012-08-08 | 日産自動車株式会社 | 転舵誘導装置および転舵誘導方法 |
| JP2008168779A (ja) * | 2007-01-11 | 2008-07-24 | Toyota Motor Corp | 車両の制動制御装置 |
| US7683771B1 (en) * | 2007-03-26 | 2010-03-23 | Barry Loeb | Configurable control panel and/or dashboard display |
| DE102008016527B4 (de) * | 2007-04-03 | 2018-12-13 | Denso Corporation | Fahrzeug-Messgeräte-Einheit und Anzeigevorrichtung |
| DE102007018072A1 (de) * | 2007-04-17 | 2008-10-30 | Volkswagen Ag | Anzeigeeinrichtung für ein Fahrzeug zum Anzeigen von den Betrieb des Fahrzeugs betreffende Informationen und Verfahren zum Anzeigen dieser Informationen |
| US20090096937A1 (en) * | 2007-08-16 | 2009-04-16 | Bauer Frederick T | Vehicle Rearview Assembly Including a Display for Displaying Video Captured by a Camera and User Instructions |
| EP2190686B1 (de) * | 2007-09-10 | 2017-03-01 | Johnson Controls GmbH | Konfigurierbares anzeigeinstrument |
| JP5636609B2 (ja) * | 2008-05-08 | 2014-12-10 | アイシン精機株式会社 | 車両周辺表示装置 |
| JP4900326B2 (ja) * | 2008-06-10 | 2012-03-21 | 日産自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| JP5139939B2 (ja) * | 2008-09-25 | 2013-02-06 | 日立オートモティブシステムズ株式会社 | 車両の減速支援装置 |
| JP5161760B2 (ja) * | 2008-12-26 | 2013-03-13 | 株式会社東芝 | 車載用表示システム及び表示方法 |
| EP2401176B1 (en) * | 2009-02-27 | 2019-05-08 | Magna Electronics | Alert system for vehicle |
| JP5376223B2 (ja) * | 2009-05-18 | 2013-12-25 | アイシン精機株式会社 | 運転支援装置 |
| WO2011055699A1 (ja) * | 2009-11-04 | 2011-05-12 | 本田技研工業株式会社 | 車両用表示装置 |
| JP5454934B2 (ja) * | 2010-09-21 | 2014-03-26 | アイシン精機株式会社 | 運転支援装置 |
| DE102011013774A1 (de) * | 2011-03-12 | 2012-09-13 | Daimler Ag | Verfahren zum Erfassen und Darstellen einer Fahrzeugumgebung eines Fahrzeugs |
| KR20130037274A (ko) * | 2011-10-06 | 2013-04-16 | 엘지이노텍 주식회사 | 멀티뷰 카메라를 이용한 주차 보조 장치 및 방법 |
| KR101362326B1 (ko) * | 2012-08-06 | 2014-02-24 | 현대모비스 주식회사 | 주차 정렬 기능을 갖는 차량 후방 카메라 시스템 및 이를 이용한 차량의 주차 지원 시스템 |
| JP5862532B2 (ja) * | 2012-09-26 | 2016-02-16 | アイシン精機株式会社 | 車両運転支援装置 |
-
2013
- 2013-12-27 US US14/760,405 patent/US9701199B2/en active Active
- 2013-12-27 CN CN201380070222.4A patent/CN104995054B/zh not_active Expired - Fee Related
- 2013-12-27 EP EP13870776.5A patent/EP2944497B1/en active Active
- 2013-12-27 BR BR112015016674-1A patent/BR112015016674B1/pt active IP Right Grant
- 2013-12-27 MY MYPI2015702248A patent/MY178908A/en unknown
- 2013-12-27 RU RU2015133515A patent/RU2643896C2/ru active
- 2013-12-27 JP JP2014556229A patent/JP5930072B2/ja active Active
- 2013-12-27 WO PCT/JP2013/007703 patent/WO2014108987A1/ja active Application Filing
- 2013-12-27 MX MX2015008933A patent/MX343132B/es active IP Right Grant
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11105728A (ja) * | 1997-10-02 | 1999-04-20 | Toyota Motor Corp | 車両用操舵制御装置 |
| JP2000344085A (ja) | 1999-06-03 | 2000-12-12 | Toyota Motor Corp | 車輪制御状態表示装置 |
| JP2005145434A (ja) * | 2003-10-21 | 2005-06-09 | Nippon Seiki Co Ltd | 車両用表示装置 |
| JP2006058064A (ja) * | 2004-08-18 | 2006-03-02 | Nippon Seiki Co Ltd | 車両用表示装置 |
| JP2010079425A (ja) * | 2008-09-24 | 2010-04-08 | Fuji Heavy Ind Ltd | 車両の運転支援装置 |
| JP2010139489A (ja) * | 2008-12-15 | 2010-06-24 | Mitsubishi Motors Corp | 車両の表示装置 |
| JP2011001049A (ja) * | 2009-05-21 | 2011-01-06 | Nissan Motor Co Ltd | 運転支援装置、及び運転支援方法 |
| JP2011002290A (ja) * | 2009-06-17 | 2011-01-06 | Zenrin Datacom Co Ltd | 地図画像表示装置、地図画像表示方法、および、コンピュータプログラム |
| JP2012216135A (ja) * | 2011-04-01 | 2012-11-08 | Olympus Corp | 画像生成システム、プログラム及び情報記憶媒体 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2944497A4 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016031320A1 (ja) * | 2014-08-27 | 2016-03-03 | 本田技研工業株式会社 | 運転支援装置及び運転支援方法 |
| WO2016058651A1 (de) * | 2014-10-16 | 2016-04-21 | Daimler Ag | Verfahren und vorrichtung zur darstellung von inhalten in einer projektion eines headup-displays, vorzugsweise eines fahrzeuges |
| CN105539287A (zh) * | 2014-10-28 | 2016-05-04 | 爱信精机株式会社 | 周边监视装置 |
| WO2017065052A1 (ja) * | 2015-10-14 | 2017-04-20 | 株式会社東海理化電機製作所 | シフト装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5930072B2 (ja) | 2016-06-08 |
| EP2944497A1 (en) | 2015-11-18 |
| EP2944497B1 (en) | 2017-03-29 |
| CN104995054B (zh) | 2018-07-17 |
| BR112015016674B1 (pt) | 2021-07-13 |
| EP2944497A4 (en) | 2016-06-15 |
| US9701199B2 (en) | 2017-07-11 |
| RU2643896C2 (ru) | 2018-02-06 |
| CN104995054A (zh) | 2015-10-21 |
| RU2015133515A (ru) | 2017-02-17 |
| US20150352956A1 (en) | 2015-12-10 |
| BR112015016674A2 (pt) | 2017-07-11 |
| MX343132B (es) | 2016-10-26 |
| JPWO2014108987A1 (ja) | 2017-01-19 |
| MX2015008933A (es) | 2015-09-28 |
| MY178908A (en) | 2020-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5930072B2 (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| JP2014133512A (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| WO2018061294A1 (ja) | 周辺監視装置 | |
| JP6447060B2 (ja) | 車両周辺監視装置 | |
| US20190244324A1 (en) | Display control apparatus | |
| WO2014199877A1 (ja) | ジョイスティック操舵車両 | |
| US10353396B2 (en) | Vehicle periphery monitoring device | |
| JP4924903B2 (ja) | 車両用表示装置 | |
| US10196004B2 (en) | Display device for saddle-type vehicle, and saddle-type vehicle | |
| JP5915777B2 (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| JP6160566B2 (ja) | 車両制御装置 | |
| JP2005096656A (ja) | 車両用マルチファンクションスイッチ | |
| JP2013208996A (ja) | 自動二輪車におけるミラー構造 | |
| JP6630110B2 (ja) | 作業用車両 | |
| US20110066329A1 (en) | Driving support device | |
| JP6525352B2 (ja) | 運転支援装置及び運転支援方法 | |
| US10875577B2 (en) | Traction assist apparatus | |
| JP6237444B2 (ja) | 産業車両 | |
| JP5366329B2 (ja) | ライディングシミュレータ | |
| WO2024147051A1 (ja) | 制御装置及び制御方法 | |
| JP2014040189A (ja) | 後輪軌跡表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13870776 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2014556229 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14760405 Country of ref document: US Ref document number: MX/A/2015/008933 Country of ref document: MX |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112015016674 Country of ref document: BR |
|
| WWE | Wipo information: entry into national phase |
Ref document number: IDP00201504756 Country of ref document: ID |
|
| REEP | Request for entry into the european phase |
Ref document number: 2013870776 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013870776 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2015133515 Country of ref document: RU Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 112015016674 Country of ref document: BR Kind code of ref document: A2 Effective date: 20150710 |