RU2478338C2 - Устройство и способ доставки физиологического датчика - Google Patents
Устройство и способ доставки физиологического датчика Download PDFInfo
- Publication number
- RU2478338C2 RU2478338C2 RU2011113976/14A RU2011113976A RU2478338C2 RU 2478338 C2 RU2478338 C2 RU 2478338C2 RU 2011113976/14 A RU2011113976/14 A RU 2011113976/14A RU 2011113976 A RU2011113976 A RU 2011113976A RU 2478338 C2 RU2478338 C2 RU 2478338C2
- Authority
- RU
- Russia
- Prior art keywords
- sensor
- patient
- wire guide
- distal sleeve
- distal
- Prior art date
Links
- 238000000034 method Methods 0.000 title description 53
- 238000002347 injection Methods 0.000 claims abstract description 47
- 239000007924 injection Substances 0.000 claims abstract description 47
- 230000036772 blood pressure Effects 0.000 claims abstract description 39
- 230000017531 blood circulation Effects 0.000 claims abstract description 10
- 210000003484 anatomy Anatomy 0.000 claims abstract description 4
- 239000012530 fluid Substances 0.000 claims description 68
- 238000004891 communication Methods 0.000 claims description 46
- 239000000835 fiber Substances 0.000 claims description 30
- 238000011144 upstream manufacturing Methods 0.000 claims description 24
- 230000007704 transition Effects 0.000 claims description 22
- 210000004351 coronary vessel Anatomy 0.000 claims description 10
- 239000004642 Polyimide Substances 0.000 claims description 9
- 210000001367 artery Anatomy 0.000 claims description 9
- 210000003709 heart valve Anatomy 0.000 claims description 9
- 229920001721 polyimide Polymers 0.000 claims description 9
- 229910001220 stainless steel Inorganic materials 0.000 claims description 5
- 239000010935 stainless steel Substances 0.000 claims description 5
- 230000002093 peripheral effect Effects 0.000 claims description 3
- 230000000694 effects Effects 0.000 abstract description 12
- 238000004364 calculation method Methods 0.000 abstract description 10
- 239000003814 drug Substances 0.000 abstract description 2
- 239000000126 substance Substances 0.000 abstract description 2
- 230000008054 signal transmission Effects 0.000 abstract 1
- 230000036285 pathological change Effects 0.000 description 56
- 208000031481 Pathologic Constriction Diseases 0.000 description 55
- 231100000915 pathological change Toxicity 0.000 description 55
- 208000037804 stenosis Diseases 0.000 description 55
- 230000036262 stenosis Effects 0.000 description 55
- 239000002872 contrast media Substances 0.000 description 37
- 238000005259 measurement Methods 0.000 description 34
- 229920000728 polyester Polymers 0.000 description 22
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 18
- 238000000576 coating method Methods 0.000 description 18
- 238000001514 detection method Methods 0.000 description 18
- 230000002792 vascular Effects 0.000 description 18
- 239000000463 material Substances 0.000 description 17
- 239000011248 coating agent Substances 0.000 description 16
- 239000011780 sodium chloride Substances 0.000 description 15
- 239000012267 brine Substances 0.000 description 11
- 238000012545 processing Methods 0.000 description 11
- HPALAKNZSZLMCH-UHFFFAOYSA-M sodium;chloride;hydrate Chemical compound O.[Na+].[Cl-] HPALAKNZSZLMCH-UHFFFAOYSA-M 0.000 description 11
- 230000000007 visual effect Effects 0.000 description 10
- 238000005086 pumping Methods 0.000 description 9
- 239000008280 blood Substances 0.000 description 8
- 210000004369 blood Anatomy 0.000 description 8
- 238000009530 blood pressure measurement Methods 0.000 description 8
- 210000004204 blood vessel Anatomy 0.000 description 8
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 8
- 238000005516 engineering process Methods 0.000 description 7
- 238000011269 treatment regimen Methods 0.000 description 7
- 239000000499 gel Substances 0.000 description 6
- 230000008901 benefit Effects 0.000 description 5
- 230000036512 infertility Effects 0.000 description 5
- 238000010606 normalization Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 239000011230 binding agent Substances 0.000 description 4
- 230000000903 blocking effect Effects 0.000 description 4
- 239000013307 optical fiber Substances 0.000 description 4
- 229910052697 platinum Inorganic materials 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 125000006850 spacer group Chemical group 0.000 description 4
- 238000002560 therapeutic procedure Methods 0.000 description 4
- 238000002583 angiography Methods 0.000 description 3
- 210000000709 aorta Anatomy 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 230000000747 cardiac effect Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 238000002591 computed tomography Methods 0.000 description 3
- 238000002788 crimping Methods 0.000 description 3
- 230000000004 hemodynamic effect Effects 0.000 description 3
- 239000007788 liquid Substances 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 238000011282 treatment Methods 0.000 description 3
- 238000012935 Averaging Methods 0.000 description 2
- 239000004696 Poly ether ether ketone Substances 0.000 description 2
- 210000002376 aorta thoracic Anatomy 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000000227 grinding Methods 0.000 description 2
- 238000007654 immersion Methods 0.000 description 2
- 238000007373 indentation Methods 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 230000002572 peristaltic effect Effects 0.000 description 2
- 229920002530 polyetherether ketone Polymers 0.000 description 2
- -1 polyethylene terephthalate Polymers 0.000 description 2
- 229920001296 polysiloxane Polymers 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- UVXNOYVRAWBANB-UHFFFAOYSA-N CC(C)C(C)(C)NC Chemical compound CC(C)C(C)(C)NC UVXNOYVRAWBANB-UHFFFAOYSA-N 0.000 description 1
- OYPRJOBELJOOCE-UHFFFAOYSA-N Calcium Chemical compound [Ca] OYPRJOBELJOOCE-UHFFFAOYSA-N 0.000 description 1
- 201000000057 Coronary Stenosis Diseases 0.000 description 1
- 229920001651 Cyanoacrylate Polymers 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- 229920000271 Kevlar® Polymers 0.000 description 1
- 239000004677 Nylon Substances 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000002399 angioplasty Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 229910052791 calcium Inorganic materials 0.000 description 1
- 239000011575 calcium Substances 0.000 description 1
- 238000013131 cardiovascular procedure Methods 0.000 description 1
- 230000001427 coherent effect Effects 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- NLCKLZIHJQEMCU-UHFFFAOYSA-N cyano prop-2-enoate Chemical class C=CC(=O)OC#N NLCKLZIHJQEMCU-UHFFFAOYSA-N 0.000 description 1
- 238000007405 data analysis Methods 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 230000035487 diastolic blood pressure Effects 0.000 description 1
- 230000003205 diastolic effect Effects 0.000 description 1
- 239000003085 diluting agent Substances 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 229920001971 elastomer Polymers 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 239000013536 elastomeric material Substances 0.000 description 1
- 229920002313 fluoropolymer Polymers 0.000 description 1
- 239000004811 fluoropolymer Substances 0.000 description 1
- 238000005242 forging Methods 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- 229910001385 heavy metal Inorganic materials 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000002697 interventional radiology Methods 0.000 description 1
- 239000004761 kevlar Substances 0.000 description 1
- 238000003698 laser cutting Methods 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 210000004115 mitral valve Anatomy 0.000 description 1
- 208000005907 mitral valve insufficiency Diseases 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012806 monitoring device Methods 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 1
- 229910001000 nickel titanium Inorganic materials 0.000 description 1
- 229920001778 nylon Polymers 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 229920003023 plastic Polymers 0.000 description 1
- 229920000139 polyethylene terephthalate Polymers 0.000 description 1
- 239000005020 polyethylene terephthalate Substances 0.000 description 1
- 229920000642 polymer Polymers 0.000 description 1
- 229920000098 polyolefin Polymers 0.000 description 1
- 239000004810 polytetrafluoroethylene Substances 0.000 description 1
- 229920001343 polytetrafluoroethylene Polymers 0.000 description 1
- 239000004800 polyvinyl chloride Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000000241 respiratory effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 230000002966 stenotic effect Effects 0.000 description 1
- 230000035488 systolic blood pressure Effects 0.000 description 1
- 229920001169 thermoplastic Polymers 0.000 description 1
- 229920001187 thermosetting polymer Polymers 0.000 description 1
- 239000004634 thermosetting polymer Substances 0.000 description 1
- 239000004416 thermosoftening plastic Substances 0.000 description 1
- 231100000756 time-weighted average Toxicity 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 210000003462 vein Anatomy 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/02028—Determining haemodynamic parameters not otherwise provided for, e.g. cardiac contractility or left ventricular ejection fraction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/0017—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system transmitting optical signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0002—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network
- A61B5/0015—Remote monitoring of patients using telemetry, e.g. transmission of vital signals via a communication network characterised by features of the telemetry system
- A61B5/0022—Monitoring a patient using a global network, e.g. telephone networks, internet
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/02007—Evaluating blood vessel condition, e.g. elasticity, compliance
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/02007—Evaluating blood vessel condition, e.g. elasticity, compliance
- A61B5/02014—Determining aneurysm
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/0205—Simultaneously evaluating both cardiovascular conditions and different types of body conditions, e.g. heart and respiratory condition
- A61B5/02055—Simultaneously evaluating both cardiovascular condition and temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/021—Measuring pressure in heart or blood vessels
- A61B5/0215—Measuring pressure in heart or blood vessels by means inserted into the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/021—Measuring pressure in heart or blood vessels
- A61B5/0215—Measuring pressure in heart or blood vessels by means inserted into the body
- A61B5/02154—Measuring pressure in heart or blood vessels by means inserted into the body by optical transmission
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/021—Measuring pressure in heart or blood vessels
- A61B5/0215—Measuring pressure in heart or blood vessels by means inserted into the body
- A61B5/02158—Measuring pressure in heart or blood vessels by means inserted into the body provided with two or more sensor elements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/021—Measuring pressure in heart or blood vessels
- A61B5/022—Measuring pressure in heart or blood vessels by applying pressure to close blood vessels, e.g. against the skin; Ophthalmodynamometers
- A61B5/0225—Measuring pressure in heart or blood vessels by applying pressure to close blood vessels, e.g. against the skin; Ophthalmodynamometers the pressure being controlled by electric signals, e.g. derived from Korotkoff sounds
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/026—Measuring blood flow
- A61B5/0261—Measuring blood flow using optical means, e.g. infrared light
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/1455—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters
- A61B5/14551—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters for measuring blood gases
- A61B5/14552—Details of sensors specially adapted therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6851—Guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6852—Catheters
- A61B5/6853—Catheters with a balloon
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/68—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient
- A61B5/6846—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive
- A61B5/6847—Arrangements of detecting, measuring or recording means, e.g. sensors, in relation to patient specially adapted to be brought in contact with an internal body part, i.e. invasive mounted on an invasive device
- A61B5/6862—Stents
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/74—Details of notification to user or communication with user or patient ; user input means
- A61B5/742—Details of notification to user or communication with user or patient ; user input means using visual displays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/36—Other treatment of blood in a by-pass of the natural circulatory system, e.g. temperature adaptation, irradiation ; Extra-corporeal blood circuits
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M5/00—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests
- A61M5/007—Devices for bringing media into the body in a subcutaneous, intra-vascular or intramuscular way; Accessories therefor, e.g. filling or cleaning devices, arm-rests for contrast media
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/12—Manufacturing methods specially adapted for producing sensors for in-vivo measurements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/01—Measuring temperature of body parts ; Diagnostic temperature sensing, e.g. for malignant or inflamed tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/50—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications
- A61B6/507—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment specially adapted for specific body parts; specially adapted for specific clinical applications for determination of haemodynamic parameters, e.g. perfusion CT
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M2025/0001—Catheters; Hollow probes for pressure measurement
- A61M2025/0002—Catheters; Hollow probes for pressure measurement with a pressure sensor at the distal end
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M2025/0034—Multi-lumen catheters with stationary elements characterized by elements which are assembled, connected or fused, e.g. splittable tubes, outer sheaths creating lumina or separate cores
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M2025/0037—Multi-lumen catheters with stationary elements characterized by lumina being arranged side-by-side
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M2025/0183—Rapid exchange or monorail catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/01—Introducing, guiding, advancing, emplacing or holding catheters
- A61M25/09—Guide wires
- A61M2025/091—Guide wires having a lumen for drug delivery or suction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0021—Catheters; Hollow probes characterised by the form of the tubing
- A61M25/0023—Catheters; Hollow probes characterised by the form of the tubing by the form of the lumen, e.g. cross-section, variable diameter
- A61M25/0026—Multi-lumen catheters with stationary elements
- A61M25/0029—Multi-lumen catheters with stationary elements characterized by features relating to least one lumen located at the middle part of the catheter, e.g. slots, flaps, valves, cuffs, apertures, notches, grooves or rapid exchange ports
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M25/00—Catheters; Hollow probes
- A61M25/0067—Catheters; Hollow probes characterised by the distal end, e.g. tips
- A61M25/0068—Static characteristics of the catheter tip, e.g. shape, atraumatic tip, curved tip or tip structure
- A61M25/007—Side holes, e.g. their profiles or arrangements; Provisions to keep side holes unblocked
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Heart & Thoracic Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biophysics (AREA)
- Physics & Mathematics (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Pathology (AREA)
- Cardiology (AREA)
- Physiology (AREA)
- Vascular Medicine (AREA)
- Hematology (AREA)
- Anesthesiology (AREA)
- Pulmonology (AREA)
- Computer Networks & Wireless Communication (AREA)
- Optics & Photonics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Ophthalmology & Optometry (AREA)
- Neurosurgery (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- High Energy & Nuclear Physics (AREA)
- Dentistry (AREA)
- Measuring Pulse, Heart Rate, Blood Pressure Or Blood Flow (AREA)
- Media Introduction/Drainage Providing Device (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Abstract
Группа изобретений относится к медицинской технике. Внутрисосудистое устройство для доставки датчика содержит дистальный рукав, датчик и проксимальный участок. Дистальный рукав имеет просвет для приема отдельного медицинского проволочного направителя и скольжения по нему. Датчик измеряет физиологический параметр пациента и генерирует сигнал, используемый для расчета фракционного резерва кровотока. Проксимальный участок имеет основную секцию и дистальный переходный участок, соединяющий основную секцию с наружной поверхностью дистального рукава. Проксимальный участок содержит канал связи для передачи сигнала с датчика в местоположение вне пациента и содействует позиционированию датчика в анатомической структуре пациента. Внутрисосудистое устройство для доставки датчика может содержать мультипросветный стержень с просветами для проволочного направителя и для датчика, а также два датчика, первый из которых соединен со стержнем датчика, а второй - с наружным участком мультипросветного стержня. При этом датчики могут быть разнесены друг от друга на варьируемое расстояние за счет скольжения стержня датчика относительно мультипросветного стержня. Система инжекции текучей среды содержит трубку для подачи текучей среды, панель управления и процессор, который может принимать сигнал, отражающий кровяное давление, от устройства для доставки датчика. Применение группы изобретений позволит повысить точность позиционирования устройства. 3 н. и 12 з.п. ф-лы, 17 ил.
Description
Перекрестная ссылка на родственные заявки
По настоящей заявке испрашивается приоритет по предварительной патентной заявке US № 61/096216, зарегистрированной 11 сентября 2008, содержание которой в полном объеме включено в настоящее описание путем ссылки.
Область техники, к которой относится изобретение
Данная заявка, в общем, относится к области медицинских технологий и, в частности, к устройствам и способам позиционирования и применения физиологических датчиков в анатомических (например, сосудистых) структурах пациентов, например в кровеносных сосудах или клапанах сердца.
Уровень техники
Определенные физиологические измерения могут быть выполнены путем размещения датчика в организме пациента. Такие физиологические измерения могут включать в себя, например, измерения параметров крови, таких как кровяное давление, уровень насыщения кислородом, pH крови и т.д. Некоторые из таких измерений могут иметь диагностическую ценность и/или могут создавать основу для принятия решений о стратегии лечения.
Технология оценки того, в какой степени патологическое изменение, связанное со стенозом, нарушает кровоток через кровеносный сосуд, называется измерением фракционного резерва кровотока (FFR). Для расчета величины FFR для заданного стеноза берутся два показания кровяного давления. Одно показание давления снимают на дистальной стороне стеноза (например, ниже по потоку от стеноза), а другой показатель давления снимают на проксимальной стороне стеноза (например, выше по потоку относительно стеноза, по направлению к аорте). Величину FFR определяют как отношение максимального кровотока в стенозированной артерии, измеренного дистально от места патологического изменения, к нормальному максимальному кровотоку, при этом расчет обычно производят на основе измеренного градиента давления, который выражается отношением дистального давления к проксимальному давлению. Таким образом, величина FFR - безразмерное отношение дистального давления к проксимальному давлению. Градиент давления или перепад давления на участке патологического изменения, связанного со стенозом, является индикатором степени тяжести стеноза, при этом величина FFR - полезный инструмент в оценке перепада давления. Чем больше сужение, вызванное стенозом, тем больше падение давления и тем меньше величина FFR. Измерение величины FFR может быть полезным инструментом в плане диагностики. Например, клинические исследования показали, что величина FFR, составляющая менее чем примерно 0,75, может использоваться в качестве критерия, на основе которого принимаются решения о стратегии лечения. Pijls, DeBruyne и др., Measurement of Fractional Flow Reserve to Assess the Functional Severity of Coronary-Artery Stenoses, 334:1703-1708, New England Journal of Medicine, June 27, 1996. Врач может принять решение, например, о проведении интервенционной процедуры (например, ангиопластики или стентирования), если значение FFR для данного патологического изменения, связанного со стенозом, ниже 0,75, или может решить воздержаться от проведения такого лечения патологических изменений, если значение FFR выше 0,75. Таким образом, FFR-измерение может стать моментом принятия решения для выбора стратегии лечения.
Один из способов измерения градиента давления на участке патологического изменения заключается в использовании небольшого катетера, присоединенного к датчику измерения кровяного давления. Катетер проводят по проволочному направителю, помещенному на участке патологического изменения. Катетер продвигают по проволочному направителю, пока наконечник катетера не пересечет участок патологического изменения. Регистрируют кровяное давление на дистальной стороне участка патологического изменения. Это значение давления делят на значение давления, зарегистрированное в аорте. Недостатком такого способа является то, что может привноситься некоторая ошибка, связанная с размером сечения катетера. Когда катетер пересекает участок патологического изменения, катетер сам по себе блокирует проход, в дополнение к тому сужению, которое вызвано стенозом. Таким образом, измеренное дистальное давление будет несколько ниже, чем оно было бы без дополнительного блокирования кровотока, что может завысить измеренный градиент давления на участке патологического изменения.
Перепад давления можно также измерить на клапане сердца. Если клапан пропускает кровь в обратном направлении, обычно наблюдают перепад давления меньше оптимального. Применение катетера для измерения перепада давления на клапане сердца - часто используемый прием. Однако в силу размера катетера клапан сердца может не обеспечивать должного уплотнения вокруг катетера. Протечка также может быть связана с присутствием катетера и может вносить свой вклад в неточные показания перепада давления. Примером того, где это может происходить, является митральный клапан (например, регургитация митрального клапана).
Один из способов измерения кровяного давления в организме пациента заключается в использовании проволочного направителя с функцией определения давления. В таком устройстве имеется датчик давления, встроенный в сам проволочный направитель. Проволочный направитель с функцией определения давления может использоваться для размещения интервенционных устройств, таких как ангиопластические баллоны или стенты. До проведения интервенции проволочный направитель с функцией определения давления проводят через участок патологического изменения, связанного со стенозом, так чтобы чувствительный элемент находился на дистальной стороне участка патологического изменения, и регистрируют дистальное кровяное давление. После этого проволочный направитель может отводиться назад, так чтобы чувствительный элемент находился на проксимальной стороне участка патологического изменения. Далее можно рассчитать градиент давления на участке стеноза и получаемую в итоге величину FFR.
Для того чтобы в определенных случаях применения использовать датчик давления на основе проволочного направителя, проволочный направитель должен быть репозиционирован, так чтобы чувствительный элемент проволочного направителя был правильно размещен, например, в отношении участка патологического изменения, связанного со стенозом. Измерения кровяного давления для расчета величины FFR, например, обычно выполняют на обеих сторонах данного стеноза, так что проволочный направитель обычно отводят назад через участок стеноза, чтобы выполнить измерение выше по потоку. После отвода назад проволочного направителя для выполнения измерения проксимального давления (аортального давления или коронарного давления выше по потоку) проволочный направитель может снова быть репозиционирован ниже по потоку от участка патологического изменения, например, если будет определено (к примеру, на основе расчета FFR), что требуется разместить интервенционное устройство. В случае существования множества участков патологического изменения чувствительный элемент проволочного направителя с функцией определения давления потребуется продвигать и отводить назад через множество участков патологического изменения, причем потенциально потребуется продвигать и снова репозиционировать для каждого такого участка патологического изменения. Продвижение проволочного направителя с функцией определения давления и манипулирование им на участках патологического изменения, связанного со стенозом, и в сосудистой системе, например, может быть сложной задачей и/или потребовать много времени.
Предпочтения врача - еще один фактор, который может повлиять на выбор диагностических инструментов или технологических приемов в определенных практических случаях. Например, для некоторых врачей может войти в привычку использовать конкретные проволочные направители для определенных случаев применения. «Стандартные» (например, имеющиеся на рынке) медицинские проволочные направители могут иметь различные размеры, показатели гибкости и моментные характеристики. Врач может предпочесть использовать различные проволочные направители для решения различных задач, например для получения доступа в труднодоступные анатомические области, либо когда в артериях встречаются бифуркации. Определенные проволочные направители, таким образом, могут лучше подходить для решения конкретных задач в силу их моментных или изгибных характеристик, и врач может отдать существенное предпочтение использованию определенного проволочного направителя, исходя из конкретной задачи (или задач), которая перед ним стоит. Проволочный направитель с функцией определения давления может иметь моментные и изгибные характеристики, которые либо неизвестны врачу, либо непригодны для решения определенной задачи, поскольку такой проволочный направитель специально выполнен с возможностью содержания датчика давления как составной части самого проволочного направителя. В итоге врач может испытывать трудности при манипулировании проволочным направителем с функцией определения давления в целевом анатомическом местоположении по сравнению со «стандартным» (например, не определяющим давление) медицинским проволочным направителем.
Привыкнув к эксплуатационным характеристикам определенного проволочного направителя, не определяющего давление, врач может воспротивиться применению проволочного направителя с функцией определения давления, который может увеличить время и повысить сложность позиционирования и репозиционирования проволочного направителя с функцией определения давления, например, по участку патологического изменения, связанного со стенозом. В таких случаях врач может предпочесть отказаться от преимуществ диагностического измерения, такого как измерение величины FFR, и просто выбрать проведение какого-либо интервенционного лечения в качестве консервативного подхода в принятии таких решений. Если бы технологии диагностических измерений и соответствующие устройства были достаточно просты в использовании, большее число врачей смогли бы их применять и тем самым принимали бы более взвешенные решения по лечению.
Сущность изобретения
Устройства и способы доставки физиологического датчика согласно вариантам осуществления изобретения могут использоваться для диагностического применения, такого как кардиоваскулярные процедуры в коронарных артериях, в области интервенционной радиологии применительно к периферийным артериям, а также в области кардиологии применительно к клапанам сердца.
Внутрисосудистое устройство для доставки датчика согласно некоторым вариантам осуществления изобретения содержит дистальный рукав с просветом для проволочного направителя для скольжения по медицинскому проволочному направителю, датчик, соединенный с дистальным рукавом, при этом датчик выполнен с возможностью измерения физиологического параметра пациента и генерирования сигнала, отражающего этот физиологический параметр. Проксимальный участок соединен с дистальным рукавом. Проксимальный участок содержит канал связи для передачи сигнала с датчика в местоположение вне пациента (такое как монитор устройства отображения информации или другое медицинское устройство и т.д.). Проксимальный участок устройства для доставки датчика выполнен с возможностью содействия позиционированию датчика в сосудистой структуре пациента.
Способ оценки степени опасности патологического изменения, связанного со стенозом, в кровеносном сосуде пациента согласно некоторым вариантам осуществления изобретения содержит размещение внутрисосудистого устройства для доставки датчика по проволочному направителю в положение, при котором датчик располагается дистально от участка патологического изменения, и измерение дистального давления. В некоторых вариантах осуществления способ может дополнительно содержать использование устройства для доставки датчика в целях перемещения датчика в положение, проксимальное по отношению к участку патологического изменения, и измерение проксимального (например, аортального) давления, а далее вычисление отношения (либо какое-либо иное количественное сравнение) этих двух результатов измерений давления. В некоторых вариантах осуществления проксимальное давление может быть получено от отдельного устройства определения давления (например, датчика давления, соединенного с системой инжекции текучей среды), при этом измерения дистального и проксимального давления могут выполняться по существу одновременно (например, для уменьшения ошибок отсчета времени), прежде чем произвести количественное сравнение этих двух величин.
Краткое описание чертежей
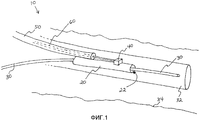
На Фигуре 1 показан вид в перспективе устройства для доставки датчика согласно одному варианту осуществления изобретения.
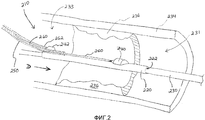
На Фигуре 2 показан концептуальный вид в перспективе устройства для доставки датчика для выполнения физиологических измерений согласно одному варианту осуществления изобретения.
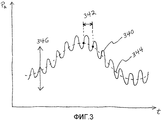
На Фигуре 3 показан концептуальный график зависимости кровяного давления пациента от времени.
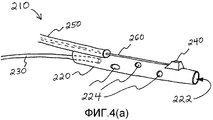
На Фигуре 4(а) показан вид сбоку устройства для доставки датчика согласно одному варианту осуществления изобретения, имеющего одно или несколько проточных отверстий, расположенных вдоль бокового участка.
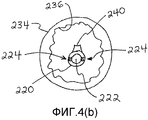
На Фигуре 4(b) показан вид в разрезе устройства для доставки датчика согласно одному варианту осуществления изобретения, имеющего одно или несколько проточных отверстий.
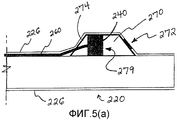
На Фигуре 5(а) показан вид сбоку, в разрезе, устройства для доставки датчика с корпусом датчика согласно одному варианту осуществления изобретения.
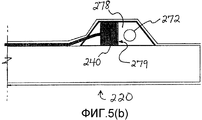
На Фигуре 5(b) показан вид сбоку, в разрезе, устройства для доставки датчика с корпусом датчика согласно одному варианту осуществления изобретения.
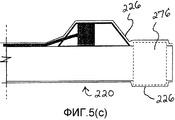
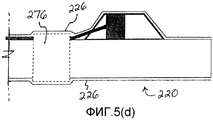
На Фигурах 5(c) и 5(d) показаны виды сбоку устройства для доставки датчика с рентгеноконтрастной маркировочной полосой согласно одному варианту осуществления изобретения.
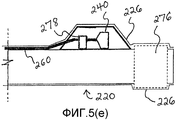
На Фигуре 5(e) показан вид сбоку, в разрезе, устройства для доставки датчика с распоркой для разгрузки от натяжения согласно одному варианту осуществления изобретения.
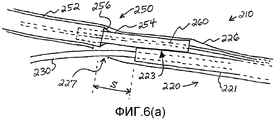
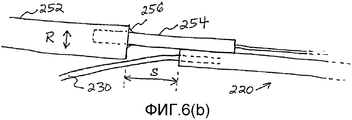
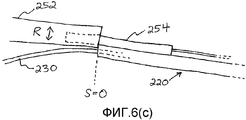
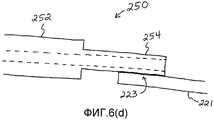
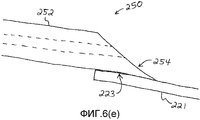
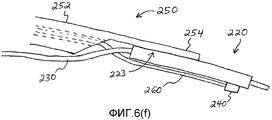
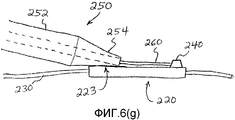
На Фигурах 6(a)-6(g) показаны увеличенные виды сбоку дистального перемещения устройства для доставки датчика согласно некоторым вариантам осуществления изобретения.
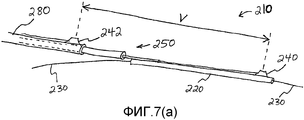
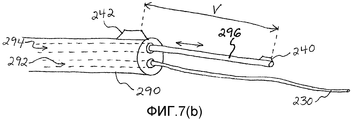
На Фигурах 7(a) и 7(b) показаны виды в перспективе устройства для доставки датчика, имеющего второй датчик, расположенный на проксимальном рукаве согласно одному варианту осуществления изобретения.
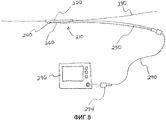
На Фигуре 8 показан вид в перспективе устройства для доставки датчика, имеющего разветвительную трубку согласно одному варианту осуществления изобретения.
На Фигуре 9 показан вид сбоку, в сечении, устройства для доставки датчика, которое имеет двухпросветную конфигурацию согласно одному варианту осуществления изобретения.
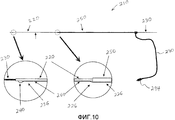
На Фигуре 10 показан вид сбоку устройства для доставки датчика, имеющего конфигурацию «расположения по проволоке» согласно одному варианту осуществления изобретения.
На Фигуре 11 показана блок-схема последовательности операций, представляющая способ использования устройства для доставки датчика согласно некоторым вариантам осуществления изобретения.
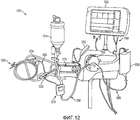
На Фигуре 12 показан вид в перспективе системы инжекции текучей среды, которая может быть использована для взаимодействия с устройством для доставки датчика согласно одному варианту осуществления изобретения.
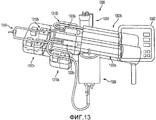
На Фигуре 13 показан вид в перспективе системы инжекции текучей среды, которая может быть использована для взаимодействия с устройством для доставки датчика согласно одному варианту осуществления изобретения.
На Фигуре 14 показана блок-схема последовательности операций способа использования устройства для доставки датчика в сочетании с системой инжекции текучей среды согласно некоторым вариантам осуществления изобретения.
На Фигуре 15 показана блок-схема последовательности операций способа использования устройства для доставки датчика согласно одному варианту осуществления изобретения.
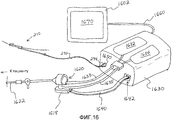
На Фигуре 16 показан вид в перспективе механизированной инжекционной системы, выполненной с возможностью соединения с устройством для доставки физиологического датчика согласно некоторым вариантам осуществления изобретения.
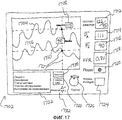
На Фигуре 17 показан схематичный вид экрана интерфейса пользователя, содержащий информацию, которая может быть отображена для оператора согласно некоторым вариантам осуществления изобретения.
Подробное описание
Последующее подробное описание сопровождается ссылками на прилагаемые чертежи, на которых одинаковые номера позиций соответствуют одинаковым элементам. На чертежах, которые не обязательно выполнены в масштабе, изображены отобранные варианты осуществления изобретения; другие возможные варианты осуществления могут стать очевидны средним специалистам в данной области техники на основе представленных идей. Таким образом, варианты осуществления, показанные на прилагаемых чертежах и описанные ниже, даны в иллюстративных целях и не направлены на ограничение объема изобретения, определяемого прилагаемой формулой изобретения.
Пример устройства для доставки датчика согласно некоторым вариантам осуществления изобретения показан на Фигуре 1. Устройство 10 для доставки датчика на Фигуре 1 включает в себя дистальный рукав 20, имеющий просвет 22 для проволочного направителя, предназначенный для приема медицинского проволочного направителя 30 с возможностью скольжения. Датчик 40 соединен с дистальным рукавом 20, при этом датчик 40 способен определять и/или измерять физиологический параметр пациента, а также генерировать сигнал, отражающий этот физиологический параметр. Таким образом, дистальный рукав 20, а значит и датчик 40, могут располагаться в организме пациента (например, в анатомической структуре пациента, такой как вена, артерия или другой кровеносный сосуд, либо, например, в клапане сердца) путем обеспечения скольжения дистального рукава 20 по медицинскому проволочному направителю 30 до требуемого местоположения.
Устройство 10 для доставки датчика на Фигуре 1 также включает в себя проксимальный участок 50, который соединен с дистальным рукавом 20. Проксимальный участок 50 включает в себя канал 60 связи для передачи сигнала с датчика 40 в некоторое местоположение вне пациента (например, в процессор, на устройство отображения, компьютер, монитор или на другое медицинское устройство). Канал 60 связи может содержать волоконно-оптический канал связи в некоторых предпочтительных вариантах осуществления, таких, где датчик 40 представляет собой волоконно-оптический датчик давления. Согласно альтернативному варианту канал 60 связи может содержать электропроводящую среду, например один или несколько электропроводящих проводов. Разумеется, многие другие виды сред передачи данных могут быть пригодны для передачи сигналов, сгенерированных датчиком 40, в некоторое местоположение вне пациента. В некоторых вариантах осуществления изобретения канал 60 связи может содержать любую из множества текучих и/или не обладающих текучестью сред передачи данных, такую как беспроводная линия передачи данных или связь в ИК диапазоне, либо звуковая связь, например ультразвуковая связь, которые можно привести в качестве примеров.
Проксимальный участок 50 также выполнен с возможностью содействия оператору (например, врачу или другому медицинскому персоналу) в позиционировании дистального рукава 20 и датчика 40 в пределах анатомической (например, сосудистой) структуры пациента. Обычно это осуществляется путем того, что оператор сначала вводит «стандартный» медицинский проволочный направитель 30 в сосудистую систему пациента и продвигает его за пределы целевой области. Устройство 10 для доставки датчика далее размещается путем «насаживания» дистального рукава 20 на проволочный направитель 30, так чтобы просвет 22 скользил по проволочному направителю 30, и продвижения дистального рукава 20 (и связанного с ним датчика 40) путем перемещения (например, проталкивания и/или подтягивания на себя) проксимального участка 50, пока датчик 40 не займет требуемое положение.
Устройством 10 и проволочным направителем 30 обычно манипулируют внутри направляющего катетера 32, который помещен в целевую анатомическую (например, сосудистую) структуру. В некоторых предпочтительных вариантах осуществления изобретения просвет 22 для проволочного направителя может быть выполнен с возможностью скольжения по медицинским проволочным направителям «стандартного» размера. Например, многие производители выпускают медицинские проволочные направители, размеры которых варьируется менее чем от примерно 0,014 дюйма в наружном диаметре до более примерно 0,038 дюйма в наружном диаметре, имея при этом конечное число принятых размеров в пределах этого диапазона. Медицинские проволочные направители «стандартного» размера могут, например, иметь наружные диаметры 0,010, 0,014, 0,018, 0,021, 0,025, 0,028, 0,032, 0,035 и 0,038 дюйма. Таким образом, в некоторых предпочтительных вариантах осуществления изобретения просвет 22 для проволочного направителя может иметь соответствующий размер, чтобы скользить по медицинскому проволочному направителю определенного стандартного размера. Устройство согласно предпочтительным вариантам осуществления, таким образом, может иметь некоторый диапазон размеров, соответствующих стандартным размерам медицинского проволочного направителя.
Одно из потенциальных преимуществ устройства 10 для доставки датчика согласно вариантам осуществления изобретения заключается в том, что оно позволяет врачу использовать проволочный направитель по своему выбору. Устройство 10 для доставки датчика может иметь размер, допускающий возможность использования с любым проволочным направителем. Врач, например, может выбрать определенный проволочный направитель на основе его особых изгибных и моментных характеристик для определенных процедур. Устройство 10 для доставки согласно различным вариантам осуществления изобретения предоставляет врачу возможность использовать такой проволочный направитель, который наилучшим образом пригоден для конкретного применения.
Еще одно потенциальное преимущество устройства 10 для доставки датчика заключается в том, что оно не требует репозиционирования проволочного направителя для того чтобы снять показания датчика. После того как проволочный направитель, например, размещен на участке патологического изменения, связанного со стенозом, устройство 10 для доставки датчика может быть установлено (например, продвинуто и/или отведено назад) по проволочному направителю, и датчик 40, следовательно, может быть продвинут или отведен назад через участки патологического изменения, например для снятия показаний давления, не прибегая при этом к перемещению проволочного направителя. Врач также может сэкономить время благодаря тому, что ему не приходится репозиционировать проволочный направитель по участку или участкам патологического изменения для того чтобы выполнить такие измерения.
В примере, показанном на Фигуре 1, устройство 10 размещают с использованием направляющего катетера 32, который помещен в целевую сосудистую структуру (в данном примере - в кровеносный сосуд 34, который, например, может представлять собой коронарную артерию пациента). В некоторых вариантах осуществления изобретения размер или «площадь» (например, ширина и/или площадь сечения) устройства 10 могут позволить ему вмещаться в направляющие катетеры определенных стандартных размеров. Например, для определенных диагностических целей желательно иметь устройство 10, размещаемое в направляющем катетере определенных стандартных размеров (например, менее чем примерно 4-5 единиц по шкале Шаррьера (FR)).
В некоторых вариантах осуществления изобретения дистальный рукав 20 устройства может быть по существу концентричен с проволочным направителем 30. Соединение проксимального участка 50 с дистальным рукавом 20 позволяет проволочному направителю 30 быть отдельным от остальной части устройства 10 (например, в «монорельсовой» конфигурации катетера, как ее иногда называют); это обычно происходит внутри направляющего катетера 32. Проволочный направитель 30 и устройство 10 оба выводятся из пациента на проксимальном конце направляющего катетера 32 как отдельные устройства. Отделение устройства 10 и проволочного направителя 30 друг от друга позволяет врачу в необходимых случаях независимо контролировать устройство 10 и проволочный направитель 30. Это может также позволить врачу использовать более короткий проволочный направитель для замены катетера. Например, монорельсовая конфигурация может предусматривать использование проволочного направителя, длина которого составляет примерно 170-200 см, в то время как конфигурация «по всей проволоке» может потребовать использования значительно более длинного (например, до 300 см и более) проволочного направителя. Отделение друг от друга устройства 10 и проволочного направителя 30 (кроме как на дистальном рукаве 20) может также привести к снижению трения (например, в направляющем катетере 32) по сравнению со случаем, когда устройство 10 и проволочный направитель 30 должны перемещаться вместе как единый блок. В некоторых вариантах осуществления на различные участки устройства может наноситься гидрофильное покрытие, чтобы дополнительно снизить величину трения, преодолеваемого, например, при продвижении или отведении назад устройства 10.
Одно из диагностических приложений, в которых могут с успехом использоваться различные варианты осуществления настоящего изобретения, - измерение фракционного резерва кровотока (FRR). Как отмечалось выше, FRR-измерения дают количественную оценку того, в какой степени патологическое изменение, связанное со стенозом, например, нарушает кровоток через кровеносный сосуд. Для расчета величины FRR для данного стеноза требуются два измерения кровяного давления: одно показание давления снимается на дистальной стороне стеноза (стороне ниже по потоку), а другое показание давления снимается на проксимальной стороне стеноза (стороне выше по потоку). Величина FRR, таким образом, представляет собой безразмерное отношение дистального давления к проксимальному давлению. Градиент давления на участке патологического изменения, связанного со стенозом - индикатор степени тяжести стеноза. Чем большее сопротивление оказывает стеноз, тем выше перепад давления и тем ниже величина FRR.
Чтобы сделать раскрытие более ясным, ниже будут описаны некоторые варианты осуществления изобретения в контексте выполнения измерений величины FRR. Однако следует понимать, что существуют и другие применения, в которых описанные здесь устройства и способы могут способствовать измерению физиологических параметров.
На Фигуре 2 показан вид в перспективе устройства для доставки датчика, предназначенного для измерения физиологического параметра пациента согласно одному варианту осуществления изобретения. Вариант осуществления, показанный на Фигуре 2, может быть, например, использован для выполнения FRR-измерения в кровеносном сосуде пациента. На Фигуре 2 показано устройство 210 для доставки датчика, размещаемое в кровеносном сосуде пациента (например, коронарной артерии 234) через стеноз (например, участок 236 патологического изменения, связанного со стенозом). Для проведения FRR-измерения, например, первый датчик 240 может быть расположен для измерения дистального (ниже по потоку) кровяного давления Pd в местоположении 231 ниже по потоку от целевого местоположения (например, участка 236 патологического изменения, связанного со стенозом). Первый датчик 240 после этого можно расположить для измерения проксимального (выше по потоку) кровяного давления Pp в местоположении 233 выше по потоку относительно целевого местоположения (например, участка 236 патологического изменения, связанного со стенозом). Величина FRR просто рассчитывается как отношение дистального давления к проксимальному давлению, или FRR=(Pd/Pp). Термины «ниже по потоку» и «выше по потоку» используются по отношению к нормальному направлению кровотока, «D», как показано на Фигуре 2.
На Фигуре 2 первый датчик 240 соединен с дистальным рукавом 220. В варианте осуществления, показанном на Фигуре 2, первый датчик 240 соединен с наружной поверхностью дистального рукава 220. Первый датчик 240 выполнен с возможностью измерения физиологического параметра пациента, такого как параметр крови (например, кровяного давления, температуры, pH, степени насыщения кислородом и т.д.), и генерирования сигнала, отражающего этот физиологический параметр. В некоторых предпочтительных вариантах осуществления изобретения первый датчик 240 представляет собой волоконно-оптический датчик давления, выполненный с возможностью измерения кровяного давления. Примером волоконно-оптического датчика давления служит волоконно-оптический датчик давления Fabry-Perot, который является коммерчески доступным датчиком. В качестве примеров волоконно-оптических датчиков давления Fabry-Perot можно привести волоконно-оптический датчик давления на основе микроэлектромеханической системы (MEMS) «OPP-M» (размером 400 микрон), изготавливаемый компанией Opsens (Квебек, Канада), и датчик «FOP-MIV» (размером 515 микрон), изготавливаемый компанией Fiso Technologies, Inc. (Квебек, Канада). В некоторых альтернативных вариантах осуществления первый датчик 240 может представлять собой пьезорезистивный датчик давления (например, пьезорезистивный датчик давления на основе микроэлектромеханической системы (MEMS)), а в других вариантах осуществления первый датчик 240 может представлять собой емкостный датчик давления (например, емкостный датчик давления на основе микроэлектромеханической системы (MEMS)). Для выполнения большинства физиологических измерений с помощью датчика 240, например, требуется диапазон определения давления от около -50 мм рт. ст. до около +300 мм рт. ст. (относительно атмосферного давления).
В вариантах осуществления изобретения с использованием волоконно-оптического датчика давления Fabry-Perot, применяемого в качестве датчика 240, такой датчик имеет отражающую диафрагму, которая изменяет результаты измерения длины полости в соответствии с давлением, приложенным к диафрагме. Когерентный свет от светового источника проходит по волокну и пересекает малую полость на конце датчика. Отражающая диафрагма отражает часть светового сигнала обратно в волокно. Отраженный свет проходит обратно через волокно в детектор на конце волокна, где расположен световой источник. Две световые волны, свет от источника и отраженный свет проходят в противоположных направлениях и интерферируют друг с другом. Степень интерференции изменяется в зависимости от длины полости. Длина полости изменяется по мере того как диафрагма смещается под давлением. Степень интерференции регистрируется интерференционным детектором.
На Фигуре 2 показан проксимальный участок 250, соединенный с дистальным рукавом 220. Проксимальный участок 250 включает в себя канал 260 связи для передачи физиологического сигнала с датчика 240 в местоположение вне пациента (например, в процессор, устройство отображения, на компьютер, монитор или другое медицинское устройство). Проксимальный участок 250 предпочтительно может быть выполнен из материала, обладающего существенной жесткостью, чтобы содействовать оператору (например, врачу или другому медицинскому персоналу) в позиционировании дистального рукава 220 и датчика 240 в пределах анатомической (например, сосудистой) структуры пациента.
Одним из пригодных материалов для проксимального участка 250, например, может быть гипотрубка из нержавеющей стали. В зависимости от области применения, проксимальный участок 250 (который иногда называют «доставочной трубкой») обычно должен быть более жестким и сопротивляющимся деформациям, чем дистальный рукав 220, чтобы обеспечить достаточный контроль над устройством при его проталкивании, подтягивании и иными действиями над ним, выполняемыми при размещении в целевом местоположении пациента. При интервенционных кардиологических процедурах, например, по меньшей мере, часть проксимального участка 250 будет подвержена манипулированию в направляющем катетере, расположенном в аорте. Проксимальный участок 250 в данном случае применения, таким образом, должен обладать достаточной гибкостью, чтобы соответствовать дуге аорты, и при этом быть достаточно жестким, чтобы проталкивать и оттягивать устройство. Соответственно пригодные материалы для проксимального участка 250 могут также включать в себя (в дополнение к вышеупомянутой гипотрубке из нержавеющей стали) такие материалы, как нитинол, нейлон и пластик или, например, композиции из множества материалов.
Канал 260 связи может располагаться вдоль наружной поверхности проксимального участка 250 или может быть образован в проксимальном участке 250, как показано на Фигуре 2. Например, канал 260 связи может содержать соединительный просвет, который в некоторых вариантах осуществления продолжается продольно по проксимальному участку 250. Канал 260 связи в некоторых вариантах осуществления может содержать волоконно-оптический канал связи, как в случае, когда датчик 240 является волоконно-оптическим датчиком давления. В альтернативном варианте канал 260 связи может содержать электропроводную среду, такую как электропроводящие провода, или иные среды передачи данных, пригодные для передачи сигнала, сгенерированного датчиком 240. В предпочтительных вариантах осуществления изобретения канал 260 связи содержит нетекучую среду передачи данных. В варианте осуществления, показанном на Фигуре 2, канал 260 связи (например, волоконно-оптический кабель) продолжается дистально за пределы проксимального участка 250 и соединен с датчиком 240. Канал 260 связи в таком варианте осуществления, по меньшей мере, частично размещен в соединительном просвете проксимального участка 250 (например, гипотрубке из нержавеющей стали).
На Фигуре 2 также показан возможный вариант осуществления изобретения, в котором с устройством 210 может быть соединен второй датчик 242. Например, второй датчик 242 может быть соединен с проксимальным участком 250, так что первый и второй датчики 240, 242 существенно разнесены друг от друга (например, на фиксированное расстояние), чтобы перекрыть участок патологического изменения, связанного со стенозом. Данный вариант осуществления может предоставить возможность измерить величину FRR без необходимости репозиционировать устройство 210, поскольку первый датчик 240 может быть помещен дистально от участка 236 патологического изменения, связанного со стенозом, для измерения величины Pd, а второй датчик 242 может быть помещен проксимально по отношению к участку 236 патологического изменения, связанного со стенозом, для измерения величины Pp. Второй датчик 242 может иметь канал 262 связи, который может быть размещен в проксимальном участке 250 или, например, может быть расположен вдоль наружной поверхности проксимального участка 250, как показано на Фигуре 2. Кроме того, возможность измерять величины Pd и Pp по существу одновременно может повысить точность и/или снизить влияние различного типа ошибок, представленных и описанных ниже со ссылкой на Фигуру 3.
Следует заметить, что в некоторых вариантах осуществления может присутствовать более двух датчиков, и что расстояние между смежными датчиками в таких вариантах осуществления может варьироваться, чтобы обеспечить возможность их распределения в пространстве. В некоторых альтернативных вариантах осуществления изобретения один или несколько датчиков могут быть размещены на проксимальном участке 250, при этом, например, на дистальном рукаве 220 датчики могут отсутствовать. В некоторых альтернативных вариантах осуществления может потребоваться иметь множество датчиков (два, три, четыре или более), разнесенных на известное фиксированное расстояние, расположенных вдоль проксимального участка 250. Это может, например, обеспечить возможность измерять величины Pd и Pp по существу одновременно, вне зависимости от длины участка патологического изменения, путем отбора соответствующей пары датчиков (из имеющегося множества датчиков), помещенных на участке патологического изменения, от которых следует получить Pd- и Pp-сигналы. Кроме того, датчики могут иметь рентгеноконтрастную маркировку некоторого вида, помещенную на них (например, маркировочные полосы), что может позволить произвести визуальную оценку размера участка патологического изменения в сочетании с измерением физиологических параметров (например, величин Pd и Pp).
На Фигуре 3 графически представлены некоторые возможные источники ошибок в измерении кровяного давления, которые, в том числе, могут повлиять на расчет величины FRR. На Фигуре 3 показан концептуальный график кровяного давления 340, P(t), в виде функции времени, представленный для некоторого пациента. Одна из возможных ошибок при расчете величины FRR связана с флуктуациями кровяного давления, вызванными систолической и диастолической фазами в сердечном цикле 342. Если величины Pd и Pp не будут измерены по существу на одной и той же фазе сердечного цикла 342, может вноситься некоторая ошибка. Аналогично этому, более медленно изменяющийся источник ошибки может быть связан с влиянием респираторного цикла (например, вдоха и выдоха) на кровяное давление, как показывает кривая 344 на Фигуре 3. Третий источник ошибки может быть связан с изменением положения тела пациента, что может либо «приподнять», либо «опустить» целиком весь профиль давления, как обозначено позицией 346 на Фигуре 3. Варианты осуществления изобретения, которые предусматривают возможность измерения величин Pd и Pp по существу одновременно, например такой, как вариант осуществления с двумя датчиками, показанный на Фигуре 2, могут иметь возможность минимизировать или исключить влияние таких «ошибок синхронизации» на расчет величины FRR. Другой способ решения вопроса влияния таких «ошибок синхронизации» согласно некоторым вариантам осуществления изобретения будет рассмотрен ниже в контексте использования системы введения контрастного вещества совместно с устройством для доставки датчика.
Возвращаясь к Фигуре 2, дистальный рукав 220 может быть по существу трубчатым, как показано, либо может иметь любую форму, которая позволит дистальному рукаву 220 скользить по медицинскому проволочному направителю 230 в целевой анатомической (например, сосудистой) структуре. В контексте измерения величины FRR в коронарной артерии, например, может потребоваться, чтобы дистальный рукав 220 имел по существу цилиндрическое сечение для минимизации общей площади сечения устройства. Дистальный рукав 220 может быть предпочтительно выполнен из гибкого материала в некоторых вариантах осуществления, чтобы способствовать позиционированию и размещению дистального рукава 220 (и датчика 240) по проволочному направителю 230 через узкие сосудистые структуры, такие как коронарные артерии. В некоторых предпочтительных вариантах осуществления дистальный рукав 220 содержит гибкую полиимидную трубку, выполненную с возможностью размещения в целевых анатомических (например, сосудистых) структурах, таких как коронарные артерии или периферийные артерии. В некоторых вариантах осуществления дистальный рукав 220 может содержать гибкую трубку в виде микроспирали. В некоторых вариантах осуществления гибкость может достигаться и/или усиливаться путем создания ряда прорезей по поверхности трубки. Например, множество прорезей или вырезов может быть создано по длине наружной поверхности дистального рукава 220 (например, с использованием технологий лазерной резки, известных средним специалистам в данной области техники). Такие прорези или вырезы могут быть направлены по существу по окружности и могут продолжаться, по меньшей мере, частично по периметру дистального рукава. Согласно некоторым вариантам осуществления последовательно расположенные прорези могут иметь угловое смещение относительно друг друга для придания гибкости во всех направлениях.
Длина дистального рукава 220 может варьироваться. В вариантах осуществления, используемых для коронарных артерий, например, дистальный рукав 220 может иметь длину до 15 дюймов, а в некоторых предпочтительных вариантах осуществления могут иметь длину 11 дюймов (например, чтобы способствовать использованию глубоко в коронарных артериях в определенных случаях). В некоторых вариантах осуществления дистальный рукав 220 может также включать в себя тонкое покрытие для обеспечения дополнительной опоры конструкции и/или повышения характеристик управляемости устройством. Такое покрытие может, например, содержать усадочную полиэфирную (PET) трубку, по существу покрывающую дистальный рукав.
Дистальный рукав 220 имеет просвет 222 для проволочного направителя, выполненный с возможностью приема со скольжением проволочного направителя 230, имеющего наружный диаметр от около 0,010 дюйма до около 0,050 дюйма. Для проведения FRR-измерений в коронарной артерии 234, например, проволочный направитель 230 может предпочтительно иметь наружный диаметр 0,014 дюйма, а просвет 222 для проволочного направителя, таким образом, должен иметь внутренний диаметр, незначительно превышающий эту величину, чтобы обеспечить возможность перемещения скольжением дистального рукава 220 по проволочному направителю 230.
На Фигуре 4(a) показан вариант осуществления изобретения, в котором одно или несколько проточных отверстий 224 расположены вдоль бокового участка дистального рукава 220 (например, по длине дистального рукава 220). Проточные отверстия 224 могут позволить крови затекать в просвет 222 для проволочного направителя, если оператор оттягивает назад (например, извлекает) проволочный направитель 230, как показано на Фигуре 4(a). Такой вариант осуществления может обеспечить повышение точности при измерении перепада давления на участке стеноза, поскольку перепад давления, связанный с самим устройством, будет снижен путем уменьшения эффективной площади сечения устройства.
На Фигуре 4(b) показан вид в сечении варианта осуществления изобретения, иллюстрирующий потенциальное снижение площади сечения, которое можно получить путем использования проточных отверстий 224 на боковом участке дистального рукава 220. Например, путем обеспечения затекания крови через проточные отверстия 224 в просвет 222 для проволочного направителя, эффективная площадь сечения устройства 210 уменьшается на площадь просвета 222 для проволочного направителя, при этом всякая ошибка при измерении кровяного давления, вызванная блокированием кровотока самим устройством 210, соответственно будет снижена.
На Фигуре 5(а) показан вид сбоку, в разрезе, участка устройства 210 согласно некоторым вариантам осуществления изобретения. На Фигуре 5(а) показаны дистальный рукав 220 и первый датчик 240 согласно одному варианту осуществления, в котором датчик 240 обеспечен с определенной степенью защиты, благодаря тому, что, по меньшей мере, частично укрыт корпусом 270 датчика, расположенным на дистальном рукаве 220. Корпус 270 датчика может быть по существу трубчатым или полукруглым, либо может иметь любую другую форму, обеспечивающую соответствующую защиту для датчика 240. Корпус 270 датчика может быть сформирован из трубки, например полиимидной, которая может иметь относительно малую толщину стенки.
Корпус 270 датчика может быть сформирован различными способами, как описывается со ссылкой на Фигуры 5(a)-5(e). Волоконно-оптические датчики, например, могут быть до некоторой степени хрупкими и обычно должны обеспечиваться некоторым видом механической защиты для снятия напряжений и/или деформаций. Сенсорная головка датчика 240 обычно крепится к каналу 260 связи (например, волоконно-оптическому кабелю) с помощью связующего. Сенсорная головка может подвергаться отрыву (например, отсоединению) от оптоволокна без приложения значительного усилия, поскольку площадь крепления обычно очень мала. На Фигурах 5(a)-5(e) показано несколько технологических приемов, использующих защитный корпус 270 датчика, окружающий датчик 240, для минимизации или устранения влияния таких напряжений на датчик 240.
Одним из материалов, который может использоваться для формирования корпуса 270 датчика, является тяжелый металл, «видимый» в рентгеновских лучах, такой как платина. Корпус 270 датчика, выполненный из платины, может обеспечить маркировочную полосу, различаемую в рентгеновских лучах, для содействия размещению и позиционированию датчика 240. Платиновый корпус 270 датчика может быть выполнен так, чтобы быть, в общем, тонким, например толщиной примерно 0,001 дюйма. Такой тонкостенный платиновый корпус 270 датчика может создать приемлемую защиту для датчика 240 от механических напряжений, которые в противном случае могут вызвать его отсоединение от канала 260 связи.
В некоторых вариантах осуществления корпус 270 датчика может быть выполнен с возможностью содействия перемещению и размещению устройства в анатомической (например, сосудистой) структуре пациента. Например, как показано на Фигуре 5(a), передний и задний участки 274 корпуса 270 датчика могут быть выполнены под углом (например, срезаны под углом), чтобы создать более гладкую, конусообразную конструкцию, которую легче проводить через анатомические (например, сосудистые) структуры пациента и проходы в организме пациента (например, это позволяет устройству 210 скользить по сосудистому руслу, образованному, например, стенками артерии, не застревая и не обдирая их). В некоторых вариантах осуществления корпус 270 датчика может быть образован в процессе формирования дистального рукава 220. Например, по существу цилиндрический сердечник может быть использован для образования дистального рукава 220, выполненного из термоотверждающегося полимера (например, полиимида) путем применения процесса нанесения покрытия погружением. При незначительной модификации этого производственного процесса может быть использован «корпусообразующий элемент», расположенный вдоль сердечника на дистальном конце сердечника. Тем самым в одном единственном процессе нанесения покрытия погружением можно сформировать корпус 270 датчика как составную часть дистального рукава 220.
В некоторых вариантах осуществления на корпус 270 датчика и дистальный рукав 220 может быть нанесено дополнительное покрытие 226. Такое покрытие 226 может способствовать перемещению и позиционированию устройства 210 в анатомической (например, сосудистой) структуре пациента. Покрытие 226 может также придать дополнительную конструктивную устойчивость совместной конфигурации датчика 240, корпуса 270 и дистального рукава 220. Примером класса материалов, которые могут быть пригодны для формирования покрытия 226, являются термопластики. Подобные материалы иногда упоминаются как тонкостенные термоусадочные трубки и включают в себя такие материалы, как полиолефины, флуорополимеры (PTFE), поливинилхлорид (PVC) и полиэфиры, в частности полиэтилентерефталат (PET). Для простоты в настоящем описании будет использован термин «PET-трубка» в отношении вариантов осуществления, в которых использованы такие материалы для тонких покрытий. PET-трубки могут найти применение, например, в вариантах осуществления с корпусом 270 или без него.
PET-трубка представляет собой термоусадочную трубку, выполненную из полиэфира, которая обладает превосходными характеристиками прочности при растяжении, имея при этом толщину стенки всего 0,0002 дюйма. PET-трубка может использоваться в некоторых вариантах осуществления изобретения для заключения в нее дистального рукава 220. Это может включать в себя, например, капсулирование корпуса 270 датчика и/или участка канала 260 связи (например, волоконно-оптического кабеля) на той части канала 260 связи, которая продолжается от проксимального участка 250. В некоторых вариантах осуществления PET-трубка может продолжаться с тем, чтобы покрывать проксимальный участок 250, например, в месте присоединения к дистальному рукаву 220. В некоторых вариантах осуществления PET-трубка может быть использована для удерживания на месте волоконно-оптического канала 260 связи по всему дистальному рукаву 220. После того как PET-трубка прошла термоусадку, в PET-трубке могут быть вырезаны одно или несколько отверстий, например, чтобы обеспечить выходной порт для проволочного направителя 230.
На Фигуре 5(a) показано отверстие 272 для текучей среды, образованное на одном из участков 274 (на переднем участке в данном примере) корпуса 270 датчика. Отверстие 272 для текучей среды позволяет текучей среде (например, крови) поступать в корпус 270 датчика и входить в контакт по текучей среде с датчиком 240. В вариантах осуществления, в которых используется покрытие 226 (такое как PET-трубка), отверстие 272 для текучей среды может быть образовано в покрытии 226.
На Фигуре 5(b) показан вариант осуществления изобретения, в котором отверстие 272 для текучей среды образовано на боковом участке корпуса 270 датчика. Такая схема расположения может обеспечить снижение вероятности «закупоривания» в корпусе 270 датчика и/или снижение вероятности застревания или обдирания в отношении любых препятствий и изгибов, возникших при позиционировании устройства 210. Например, при перемещении устройства по артерии в корпус 270 могут попасть бляшка или отложение кальция со стенок артерии; расположение отверстия 272 для текучей среды на боковом участке корпуса 270 может снизить данный эффект. В некоторых вариантах осуществления, позволяя покрытию 226 из PET-трубки оставаться нетронутым на дистальном конце корпуса 270, можно предотвратить попадание посторонних материалов в корпус 270 и возможное повреждение ими датчика 240, либо снижение точности измерений давления. После того как покрытие 226 из PET-трубки прошло термоусадку на устройстве 210, в покрытии 226 по необходимости могут быть пробиты отверстия для образования отверстий 272 для текучей среды, чтобы обеспечить доступ текучей среде (например, крови) внутрь корпуса 270 датчика.
В некоторых вариантах осуществления изобретения внутренний участок корпуса 270 датчика может быть заполнен гелем 278, таким как силиконовый гель-диэлектрик. Силиконовые гели-диэлектрики часто используются с твердотельными датчиками, например, для защиты датчика от эффектов воздействия текучей среды. Если корпус 270 датчика заполнен гелем 278 спереди от диафрагмы 279 датчика, тогда посторонний материал с меньшей вероятностью проникнет внутрь корпуса 270. Гель 278 может также обеспечить дополнительную конструктивную устойчивость датчику 240 и/или может повысить характеристики чувствительности датчика 240 к давлению. Гель 278 может быть использован в любом из вариантов осуществления корпуса 270 датчика, показанных на Фигурах 5(a)-5(d), и их эквивалентах.
На Фигурах 5(c) и 5(d) показаны варианты осуществления изобретения, которые включают в себя возможную маркировочную полосу. Если корпус 270 датчика выполнен, например, из полиимидной трубки, устройство 210 может быть плохо различимым в рентгеновских лучах. Возможная маркировочная полоса 276 может быть помещена поблизости от конца дистального рукава 220. Маркировочная полоса 276 может обеспечить визуальную индикацию местоположения датчика 240 при рассмотрении в рентгеновских лучах. Как показано на Фигуре 5(c), маркировочная полоса 276 на конце дистального рукава 220 может обеспечить некоторое усиление конструкции концевой части дистального рукава 220. В альтернативном варианте осуществления, показанном на Фигуре 5(d), маркировочная полоса 276 на дистальном рукаве 220, расположенная проксимально по отношению к корпусу 270 датчика, может снизить вероятность смещения маркировочной полосы 276 с устройства 210. В некоторых вариантах осуществления может потребоваться включить в состав некоторое количество таких маркировочных полос, разнесенных на определенное расстояние (например, каждые 10 мм по длине дистального рукава 220), так чтобы маркировочные полосы могли быть использованы для обеспечения визуальной оценки длины или расстояния (например, для измерения длины участка патологического изменения).
На Фигуре 5(e) показан вариант осуществления, в котором используется распорка 278 для разгрузки от натяжения в соединении между датчиком 240 и каналом 260 связи. Этот элемент для разгрузки от натяжения может быть выполнен из любого пригодного материала, например, такого как полиэфирэфиркетон (PEEK). В некоторых вариантах осуществления разделитель 278 может быть выполнен так, чтобы служить маркировочной полосой 276, по существу как описано выше. Разделитель 278 может применяться в вариантах осуществления с корпусом 270 датчика или в вариантах осуществления без корпуса датчика.
На Фигуре 6(a) показан увеличенный вид сбоку участка устройства 210 согласно одному варианту осуществления изобретения. Доставочная трубка (проксимальный участок 250) и дистальный рукав 220 предпочтительно соединены друг с другом с использованием способа создания гибкого соединения (медицинского клея) для поддержки гибкости устройства 210. В некоторых предпочтительных вариантах осуществления, например, проксимальный участок 250 будет крепиться к наружной поверхности 221 дистального рукава 220 в области 223 крепления. Область 223 крепления предпочтительно расположена на дистальном рукаве 220 существенно проксимальнее датчика 240, так что область 223 крепления не находится в пределах целевой сосудистой структуры или целевого прохода (например, она не находится в артериальном сосуде рядом с участком стеноза), но при этом остается внутри направляющего катетера 232. Область 223 соединения или крепления предпочтительно поддерживает некоторый уровень гибкости, чтобы обеспечить приспособленность к изгибам, таким как в дуге аорты. Как указывалось ранее, может потребоваться минимизировать ширину устройства 210, так чтобы оно, например, могло проходить через относительно малый направляющий катетер 232. Эта цель может быть достигнута, по меньшей мере, частично посредством того, что область 223 крепления должна быть как можно более узкой. В некоторых вариантах осуществления предпочтительно использовать устройство 210 для доставки датчика внутри диагностического направляющего катетера 232, размер которого обычно составляет 4 единицы по шкале Шаррьера (Fr).
В некоторых вариантах осуществления использование дистального переходного участка 254 для соединения проксимального участка 250 с дистальным рукавом 220 может обеспечить существенное уменьшение ширины устройства 210. В некоторых предпочтительных вариантах осуществления изобретения устройство 210 способно проходить через направляющий катетер 232 размером 4 единицы по шкале Шаррьера (Fr). В варианте осуществления на Фигуре 6(a) имеется проксимальный участок 250, содержащий основную секцию 252 и дистальный переходный участок 254. Дистальный переходный участок 254 продолжается дистально от основной секции 252 и соединен с наружной поверхностью 221 дистального рукава 220 в области 223 крепления. Как показано на Фигуре 6(a), использование дистального переходного участок 254 для соединения проксимального участка 250 с дистальным рукавом 220 может привести к уменьшению ширины устройства 210 по сравнению с устройством 210, не имеющим дистального переходного участка 254. Это может быть реализовано, например, в вариантах осуществления, в которых дистальный переходный участок 254 имеет меньшую площадь сечения, чем основная секция 252 (разумеется, дистальный переходный участок 254 является возможным дополнением и может не потребоваться во всех вариантах осуществления изобретения; варианты осуществления, показанные на Фигурах 1, 2 и 4, например, не включают в себя дистальный переходный участок, что может, например, упростить производственный процесс).
В варианте осуществления, показанном на Фигуре 6(a), дистальный переходный участок 254 может быть по существу коаксиальным и/или соосным с основной секцией 252 и имеет меньший диаметр, чем основная секция 252. В некоторых вариантах осуществления дистальный переходный участок 254 может быть образован путем введения гипотрубки внутрь на торце проксимального участка 250, при этом гипотрубка несколько меньше в диаметре, чем проксимальный участок 250. Дистальный переходный участок 254 гипотрубки и проксимальный участок могут быть далее спаяны, как обозначено позицией 256. Дистальный рукав 220, который может содержать тонкостенную трубку, выполненную из такого материала как полиимид, может быть далее присоединен к дистальному переходному участку 254 меньшего диаметра. Согласно альтернативному варианту дистальный рукав 220 может быть образован из микроспирали, навитой из плоской проволоки, с PET-трубкой, прошедшей термоусадку поверх микроспирали. Вариант осуществления, в котором для дистального рукава 220 используется микроспираль из нержавеющей стали, может обеспечить более низкий коэффициент трения (чем полиимид, например), чтобы снизить трение скольжения. Тем не менее такой вариант осуществления с микроспиралью вероятно выиграет от использования покрытия 226 в виде PET-трубки, чтобы обеспечить усиление конструкции и/или гладкую поверхность. PET-трубка может быть использована для образования покрытия 226, как показано на Фигуре 6(a), по существу так, как описано выше. Когда покрытие 226 в виде PET-трубки прошло термоусадку в области дистального переходного участка 254, например, покрытие 226 может иметь одно или несколько отверстий 227, образованных в PET-трубке, например, для создания выходного порта 227 для проволочного направителя 230, как показано на чертеже. Следует отметить, что хотя это показано только на Фигуре 6(a), все варианты осуществления, представленные на Фигурах 6(a), 6(b) и 6(c), могут включать в себя возможное покрытие 226 (например, PET-трубку) согласно некоторым вариантам осуществления изобретения.
На Фигуре 6(b) показан вариант осуществления изобретения, в котором продольная ось дистального переходного участка 254 смещена в радиальном направлении на некоторое расстояние «R» от продольной оси основной секции 252, чтобы обеспечить дополнительное возможное снижение ширины устройства 210, например, для минимизации площади устройства 210 и обеспечения возможности использования относительно малого направляющего катетера. На Фигуре 6(c) показан вариант осуществления, в котором радиальное смещение «R» противоположно по направлению смещению «R», представленному на Фигуре 6(b). Такая схема расположения может обеспечить больший свободный зазор для проволочного направителя 230 при его выходе из дистального рукава 220 в области поблизости от дистального переходного участка 254.
На Фигурах 6(a) и 6(b) также показаны технологические приемы, которые могут быть использованы для образования дистального переходного участка 254. Например, дистальный переходный участок 254 может быть образован путем приваривания или припаивания трубчатого звена к основной секции 252, как обозначено позицией 256. Как можно видеть, трубчатое звено 254 может продолжаться с заходом в торец основной секции 252 и может включать в себя канал 260 связи (например, продолжение канала 260 связи в основной секции 252). Согласно альтернативному варианту дистальный переходный участок 254 может быть образован путем «обжатия» дистального конца основной секции 252, как обозначено позицией 256. «Обжатие», как следует понимать этот термин в настоящем описании, охватывает множество производственных процессов, которые уменьшают диаметр заготовки, например с помощью пропускания заготовки (или ее участка) через ограничительную форму или путем отбивки молотом круглой заготовки для получения заготовки меньшего диаметра (например, ротационное обжатие или радиальная ковка).
Другие способы образования дистального переходного участка 254 могут включать в себя шлифовку (например, для уменьшения наружного диаметра одной детали от величины диаметра основной секции 252 до величины диаметра переходного участка 254) либо использование связующих или клея (эпоксидные связующие, связующие, отверждаемые ультрафиолетовым облучением, цианоакрилаты и т.д.), либо горячее формование и/или другие технологии, известные средним специалистам в данной области техники. На Фигурах 6(d) и 6(e) показаны примеры вариантов осуществлений, которые могут быть выполнены, например, с помощью шлифовки или иной сравнимой с ней технологии. Кроме того, дистальный переходный участок 254 не обязательно должен продолжаться в основную секцию 252 и может удерживаться встык с основной секцией 252 с использованием некоторых из перечисленных выше технологий.
На Фигурах 6(a) и 6(b) представлены варианты осуществления изобретения, в которых дистальный переходный участок 254 используется для создания «отступа» основной секции 252 от дистального рукава 220 на расстояние «S», как показано на чертежах. Это может обеспечить преимущество в создании дополнительного «свободного зазора» для проволочного направителя 230 при его выходе из дистального рукава 220. Однако этот отступ не является обязательным, и могут использоваться варианты осуществления изобретения с нулевым отступом, как показано на Фигуре 6(c) (т.е. S=0).
На Фигуре 7(a) показан один возможный вариант осуществления изобретения, в котором второй датчик 242 соединен с проксимальным рукавом 280, что позволяет разнести друг от друга первый и второй датчики 240, 242 на варьируемое расстояние «V», как показано на чертеже. Проксимальный рукав 280 в таком варианте осуществления выполнен с возможностью перемещения в продольном направлении (т.е. продвижения вперед и/или отвода назад) оператором путем скольжения по проксимальному участку 250 для достижения требуемого расстояния, «V», как показано на чертеже.
На Фигуре 7(b) показан альтернативный вариант осуществления, в котором мультипросветный стержень 290 (например, выполненный из полимера) включает в себя просвет 292 для проволочного направителя, просвет 294 для датчика, предназначенный для выдвигаемого вперед/отводимого назад первого датчика 240, расположенного на дистальном конце выдвигаемого вперед/отводимого назад стержня 296 датчика, при этом стержень 296 датчика может входить с возможностью скольжения в просвет 294 для датчика, а также датчик 242, соединенный с наружным участком мультипросветного стержня 290. Первый и второй датчики 240, 242 могут быть разнесены друг от друга на варьируемое расстояние (например, на участке патологического изменения, связанного со стенозом или другом целевом анатомическом местоположении в организме пациента) путем перемещения скольжением стержня 296 датчика относительно мультипросветного стержня 290 (например, путем перемещения стержня 296 датчика в просвете 294 для датчика).
На Фигуре 8 показано устройство 210 согласно одному варианту осуществления изобретения, в котором проксимальный конец проксимального участка 250 соединен с волоконно-оптической разветвительной трубкой 290 (например, в вариантах осуществления изобретения, в которых применяется волоконно-оптический датчик). Волоконно-оптическая разветвительная трубка 290 обеспечивает продление волоконно-оптического канала 260 связи (от датчика 240 через проксимальный участок 250) к добавочному соединителю 294, такому как «SC» волоконно-оптический соединитель (SC-соединитель представляет собой волоконно-оптический соединитель с блокировочным механизмом нажимно-вытяжного типа, который обеспечивает быструю подстыковку и отстыковку, гарантируя при этом надежное соединение; он соответствует также определенным промышленным стандартам, обеспечивая соединение с различными волоконно-оптическими устройствами, которые соответствуют тем же стандартам). Разветвительная трубка 290, например, может снабжаться SC-соединителем 294, чтобы позволить устройству 210 отправлять сигнал с датчика 240, например, на другие устройства, мониторы, устройства для инжекции текучей среды, блоки отображения информации, управляющие блоки и т.д. Согласно некоторым вариантам осуществления разветвительная трубка 290 может содержать трубку, армированную волокном Кевлар (например, для придания прочности). В некоторых альтернативных вариантах осуществления разветвительная трубка 290 может быть образована коаксиальной трубкой.
Длина разветвительной трубки 290 может быть выбрана так, чтобы она продолжалась от устройства 210 в зоне соблюдения стерильности (например, где находится пациент) в некоторое место вне пациента, например в медицинский инжектор для введения текучей среды или автономное устройство отображения информации, либо в иное оборудование 296 для обработки данных или выполнения расчетов, расположенное на некотором расстоянии от пациента. SC-соединитель 294 выполнен с возможностью соединения с инжектором (или иным блоком обработки сигналов), имеющим соответствующую конфигурацию. Если обработка сигнала выполняется в инжекторе, тогда может быть использовано устройство отображения на инжекторе для отображения колебаний давления и/или расчета и отображения значений FFR.
Альтернативный вариант осуществления изобретения предлагает построение дистального участка 300 устройства 210 для доставки датчика, используя двухпросветную конфигурацию. Пример такого варианта осуществления показан на Фигуре 9. Один просвет дистального участка 300 вмещает в себя волоконно-оптический канал 260 связи от датчика 240 (а в некоторых вариантах осуществления - от корпуса 270 датчика). Второй просвет (например, просвет 222 для проволочного направителя) выполнен с возможностью скольжения по проволочному направителю 230, как показано на чертеже. Проволочный направитель 230 в таком варианте осуществления выходит из двухпросветного дистального участка 300 на некотором расстоянии (например, около 10-12 дюймов) позади от датчика 240 (например, проксимально по отношению к нему) через отверстие 320 в устройстве 210. В некоторых вариантах осуществления придающая жесткость проволока 310 может быть расположена на остальном проксимальном участке просвета 222 (т.е. участке просвета 222 для проволочного направителя в проксимальном участке 250 устройства 210). Жесткость проволоки 310, используемой для придания жесткости, может варьироваться, например, чтобы помочь врачу в размещении и позиционировании устройства 210 через катетер в определенной целевой анатомической (например, сосудистой) структуре. Придающая жесткость проволока 310 может быть частью двухпросветного устройства 210 или, согласно некоторым вариантам осуществления, может быть добавочным, извлекаемым элементом, выбираемым врачом для получения требуемого уровня жесткости.
В следующем альтернативном варианте осуществления изобретения будет представлено устройство, полностью выполненное по проволоке (OTW), по существу такое, как показано на Фигуре 10. На Фигуре 10 показан вариант осуществления изобретения, в котором как дистальный рукав 220, так и проксимальный участок устройства 210 для доставки датчика выполнены с возможностью скольжения по проволочному направителю 230. Проволочный направитель 230 в таком варианте осуществления изобретения не выходит из и не отделяется от устройства 210 в некоторой точке по длине устройства 210. Вместо этого проксимальный участок 250 устройства 210 по всей своей длине будет скользить по проволочному направителю 230 в направляющем катетере (не показан). Конструкция устройства может включать в себя трубки двух различных размеров, например, для образования дистального рукава 220 и проксимального участка 250. Например, меньшая по диаметру тонкостенная трубка может образовывать дистальный рукав 220, где располагается датчик 240 (при необходимости - в корпусе 270 датчика). На некотором расстоянии сзади от месторасположения датчика 240 на дистальном рукаве 220 трубка меньшего диаметра дистального рукава 220 переходит в участок большего диаметра (например, проксимальный участок 250), оставляя достаточный зазор между внутренней стенкой обеих трубок и проволочным направителем. Такой зазор может обеспечить меньшее трение и меньшее сопротивление скольжению, например, при позиционировании датчика 240. Трубка большего диаметра проксимального участка 250 может быть выполнена, например, из материала с низким коэффициентом трения для снижения сопротивления скольжению. Датчик 240 (и корпус 270 датчика, там, где он применяется) может иметь ту же конструкцию, которая описана выше в отношении Фигур 5(a)-5(d).
На Фигуре 10 показан пример варианта осуществления изобретения, иллюстрирующий концепцию «расположения по проволоке». Трубка большего диаметра проксимального участка 250 может быть образована однопросветной трубкой или двухпросветной трубкой. В случае с однопросветной трубкой, канал 260 связи (например, оптоволокно) может располагаться, например, на наружной поверхности проксимального участка 250 и может проходить в направлении соединителя на проксимальном конце устройства 210. В вариантах осуществления, в которых проксимальный участок 250 образован двухпросветной трубкой, канал 260 связи может проходить в направлении соединителя на проксимальном конце устройства 210 во втором просвете. Это, например, может обеспечить дополнительную защиту для канала 260 связи (например, оптоволокна).
На Фигуре 11 показана блок-схема последовательности операций, представляющая способ использования устройства для доставки датчика согласно некоторым вариантам осуществления изобретения. В предпочтительном варианте осуществления изобретения, например, способ может быть использован для оценки степени опасности патологического изменения, связанного со стенозом, в сосудистой системе пациента. Этап 1105 содержит размещение проволочного направителя в теле пациента в целевом местоположении. В некоторых вариантах осуществления проволочный направитель может предназначаться для диагностических целей, при этом совместно с проволочным направителем пациенту может также вводиться направляющий катетер. Этап 1110 содержит размещение устройства для доставки датчика по проволочному направителю, так чтобы датчик располагался ниже по потоку от целевого местоположения (например, ниже по потоку от участка патологического изменения, связанного со стенозом). В некоторых вариантах осуществления изобретения в устройстве для доставки датчика имеется датчик, установленный на дистальном рукаве, который скользит по проволочному направителю, и проксимальный участок, который используется для продвижения дистального рукава по проволочному направителю без необходимости в перемещении проволочного направителя. Этап 1115 содержит использование датчика устройства для доставки датчика для измерения целевого физиологического параметра в целевом местоположении. В некоторых вариантах осуществления физиологический параметр представляет собой кровяное давление, Pd, ниже по потоку от участка патологического изменения, связанного со стенозом. Этап 1120 содержит измерение референсного значения целевого физиологического параметра. В некоторых вариантах осуществления данный этап содержит измерение кровяного давления, Pp, выше по потоку относительно участка патологического изменения, связанного со стенозом. Это можно осуществить, например, с помощью отдельного устройства мониторинга кровяного давления, согласно некоторым вариантам осуществления, либо это можно сделать путем репозиционирования устройства для доставки датчика в местоположении, находящемся выше по потоку относительно участка патологического изменения, связанного со стенозом, и выполнения второго измерения давления с помощью датчика этого устройства. Этап 1125 может представлять собой дополнительный этап, который содержит сравнение значения целевого физиологического параметра, измеренного в целевом местоположении, с референсным значением, измеренным на этапе 1120. В некоторых вариантах осуществления это может содержать расчет отношения двух измеренных величин. В одном предпочтительном варианте осуществления изобретения этап 1125 содержит расчет величины FFR в виде отношения значения кровяного давления ниже по потоку к значению кровяного давления выше по потоку, Pd/Pp. Этап 1130 может представлять собой дополнительный этап, который содержит обеспечение индикации результата, полученного на этапе 1125. Например, этап 1130 может содержать обеспечение визуальной индикации вычисленной величины FFR, либо может предоставить визуальные подсказки (например, создать цветовую индикацию степени опасности патологического изменения, связанного со стенозом, например, красная маркировка - для значений FFR менее 0,75, а зеленая маркировка - для значений FFR, равных или превышающих 0,75, в качестве возможных примеров).
Может потребоваться, как упоминалось выше в отношении Фигуры 8, чтобы устройство 210 для доставки датчика взаимодействовало с другими устройствами и/или средством отображения информации. Например, разветвительная трубка 290 и соединитель 294 могут быть использованы для подачи сигнала (например, сигнала, соответствующего измеренному физиологическому параметру) с датчика 240 на устройство 296 обработки данных. Устройство 296 обработки данных может представлять собой, например, автономный монитор устройства отображения для показа форм колебательных сигналов и/или численных значений сигнала, соответствующего физиологическому параметру, с датчика 240. В некоторых вариантах осуществления устройство 296 обработки данных может обладать возможностью записи данных. В некоторых предпочтительных вариантах осуществления изобретения устройство 296 обработки данных может содержать медицинскую систему инжекции текучей среды, такую как механизированный инжектор текучей среды, используемый для введения контрастной среды и/или солевого раствора в процессе проведения определенных визуализирующих процедур (например, ангиографии, компьютерной томографии, магнитно-резонансного исследования, ультразвукового исследования и т.д.). На Фигурах 12 и 13 показаны примеры механизированных инжекционных систем, которые могут быть использованы с устройством для доставки датчика по различным вариантам осуществления изобретения.
На Фигуре 12 показан вид в перспективе одного варианта осуществления механизированной инжекционной системы 1200, которая может быть использована для выполнения различных функций и в процессе работы может быть связана с устройством для доставки физиологического датчика, таким как устройство для доставки датчика согласно различным вариантам осуществления, описанным выше. Механизированная инжекционная система 1200, представленная на Фигуре 12, может использоваться для введения текучих сред медицинского назначения, таких как контрастное вещество или соляной раствор, пациенту в зоне стерильности в процессе медицинской процедуры (такой как процедура проведения ангиографии или компьютерной томографии). Согласно одному варианту осуществления устройство для доставки физиологического датчика может быть соединено с системой 1200 и использовано в зоне стерильности в процессе проводимой пациенту процедуры. Система 1200 включает в себя различные компоненты, такие как панель 1202 управления, соединитель 1204 блока ручного управления, блок 1212 ручного управления, резервуар 1206 для текучей среды, трубка 1208, насос 1210, трансдьюсер 1218 давления, резервуар 1214 для текучей среды, инжекционный шприц 1216, трубка 1222 для инжекции под высоким давлением, клапан 1220, детектор 1224 воздуха, а также запорный кран 1226. В одном варианте осуществления, который будет подробнее описан ниже, резервуар 1206 для текучей среды содержит контейнер, например, такой как емкость или бутыль с разбавляющим веществом (таким как соляной раствор), резервуар 1214 для текучей среды содержит контейнер, например, такой как емкость или бутыль с контрастным веществом, а насос 1210 содержит перистальтический насос. В других вариантах осуществления насос 1210 может содержать насосное устройство другого вида, например шприцевой насос, насос с зубчатой передачей или иной поршневой насос. В некоторых вариантах осуществления инжекционный шприц 1216 (с соответствующим плунжером), который представляет собой насосное устройство, можно заменить на насосное устройство другого типа, которое вводит пациенту текучую среду под высоким давлением. Отдельное насосное устройство способно работать или функционировать в различных или многочисленных режимах. Например, насосное устройство может быть выполнено с возможностью прокачки текучей среды, будучи задействованным или запущенным в работу, для перемещения в первом направлении (например, вперед), при этом оно может быть также выполнено с возможностью перемещения во втором направлении (например, противоположном направлении, назад) для выполнения определенных функций.
В системе 1200 на Фигуре 12 также показан блок 1212 ручного управления и детектор 1224 воздуха. Оператор может использовать блок 1212 ручного управления, чтобы вручную управлять введением соляного раствора и/или контрастного вещества. Например, оператор может нажать первую кнопку (не показана) на блоке 1212 ручного управления для инжекции соляного раствора и может нажать вторую кнопку (не показана) для введения контрастного вещества. В одном варианте осуществления оператор может нажимать на кнопку введения контрастного вещества для доставки контрастного вещества с различной величиной расхода. Чем сильнее оператор нажимает на кнопку, тем выше скорость потока контрастного вещества, вводимого пациенту. Другие блоки управления, такие как блоки управления с ножной педалью, могут также использоваться. Детектор 1224 воздуха способен обнаруживать возможные воздушные пузырьки или колонны в трубке 1222 высокого давления. В одном варианте осуществления детектор 1224 воздуха представляет собой ультразвуковой или акустический детектор. В других вариантах осуществления детектор 1224 воздуха может использовать прием инфракрасного излучения или сигналов иного типа (например, оптических). Если детектор 1224 воздуха обнаруживает присутствие воздуха в трубке 1222 высокого давления, он генерирует сигнал для предупреждения оператора и/или останавливает процедуру инжекции.
Оператор может использовать панель 1202 управления для того, чтобы просматривать и/или выбирать различные параметры и/или протоколы, которые должны быть использованы в ходе данной процедуры. Панель 1202 управления может использоваться для отображения информации для оператора в отношении статуса оборудования и/или пациента. Насос 1210 может использоваться для закачки соляного раствора из емкости пациенту через трубку 1208 подачи соляного раствора, клапан 1220 и трубку 1222 высокого давления. В одном варианте осуществления клапан 1220 содержит золотниковый клапан пружинного типа, известный в данной области техники. В одном варианте осуществления клапан 1220 содержит клапан на основе эластомеров.
В одном варианте осуществления шприц 1216 используется для забора контрастного вещества из резервуара 1214 в шприц 1216 и введения контрастного вещества из шприца 1216 пациенту через клапан 1220 и трубку 1222 высокого давления. В одном варианте осуществления шприц 1216 представляет собой «самоопорожняемый» шприц, имеющий один порт для заполнения контрастным веществом и удаления воздуха и второй порт для введения контрастного вещества.
Клапан 1220 может использоваться для управления соединением между входными портами, ведущими в клапан 1220, и выходным портом. В одном варианте осуществления клапан включает в себя два входных порта, один из которых соединен с линией подачи контрастного вещества, а второй - с линией подачи соляного раствора. Линия подачи соляного раствора также включает в себя трансдьюсер 1218 давления для выдачи сигнала, несущего информацию, например, о кровяном давлении пациента.
Запорный кран 1226 регулирует потоки текучих сред, поступающих в пациента. В одном варианте осуществления клапан 1220 позволяет подсоединить к магистрали 1222 пациента (трубке высокого давления) либо линию подачи соляного раствора, либо линию подачи контрастного вещества. Когда шприц 1216 используется для введения контрастного вещества, например, клапан 1220 может позволить контрастному веществу поступать в магистраль 1222 пациента, блокируя при этом поступление соляного раствора в магистраль 1222 пациента. Клапан 1220 может функционировать так, что трансдьюсер 1218 давления мог быть также заблокирован или изолирован от магистрали 1222 пациента в процессе инжекций под высоким давлением, например, для защиты трансдьюсера 1218 от воздействия высоких давлений при инжекции, которые могут сопровождать введение контрастного вещества. Когда введение контрастного вещества из шприца 1216 не осуществляется, клапан 1220 может сработать на блокирование линии подачи контрастного вещества от магистрали 1222 пациента, открывая при этом сообщение по текучей среде между линией (трубкой) 1208 подачи соляного раствора и магистралью 1222 пациента. В этом положении насос 1210 способен вводить пациенту соляной раствор, при этом трансдьюсер 1218 давления также способен осуществлять мониторинг гемодинамических сигналов, поступающих от пациента посредством магистрали 1222 пациента, и генерировать характерные сигналы на основе измеренных значений давления.
Как отмечалось выше, согласно некоторым вариантам осуществления изобретения система 1200 на Фигуре 12 может быть выполнена с возможностью соединения с устройством для доставки физиологического датчика. Система 1200, например, может быть выполнена с возможностью приема физиологического сигнала, сгенерированного датчиком 240 устройства 210. В вариантах осуществления, в которых физиологический сигнал с устройства 210 представляет собой сигнал давления, измеренного ниже по потоку от участка патологического изменения, связанного со стенозом (например, Pd), система 1200 может, например, упростить расчет величины FFR, поскольку величина Pp может быть уже предоставлена трансдьюсером 1218 давления системы 1200. Визуальное или графическое отображение рассчитанной величины FFR может быть предоставлено оператору, например, посредством панели 1202 управления. Поскольку при такой схеме могут быть получены мгновенные значения Pp и Pd, влияние синхронизации и связанные с этим ошибки, отмеченные выше в отношении Фигуры 3, не создадут проблемы - одновременное измерение Pp и Pd уменьшит или исключит подобные ошибки. Кроме того, в системе 1200 может выполняться осреднение по времени или другая обработка сигнала, чтобы создать математические варианты расчета величины FFR (например, с использованием средних, максимальных, минимальных и других значений). Согласно альтернативному варианту изменяющееся во времени отображение или график вычисленной величины FFR может выводиться на дисплей в форме волны (например, как функция времени).
На Фигуре 13 показан вид в перспективе одного варианта осуществления механизированной инжекционной системы 1300, которая может быть использована для выполнения различных функций и в процессе работы может быть связана с устройством для доставки физиологического датчика, таким как в различных вариантах осуществления, описанных выше. Механизированная инжекционная система 1300, представленная на Фигуре 13, может использоваться для введения текучих сред медицинского назначения, таких как контрастная среда или соляной раствор, пациенту в зоне стерильности в процессе медицинской процедуры (такой как процедура проведения ангиографии или компьютерной томографии). Согласно одному варианту осуществления устройство для доставки физиологического датчика может быть соединено с системой 1300 и использовано в зоне стерильности в процессе проводимой пациенту процедуры.
Система 1300 на Фигуре 13 представляет собой двухшприцевую систему, которая включает в себя панель 1302 управления и два узла 1303a и 1303b двигателя/привода. Каждый двигатель управляет одним из линейных приводов узлов 1303a, 1303b. Каждый линейный привод управляет плунжером одного из шприцов 1308a и 1308b. Каждый плунжер перемещается в цилиндре шприца 1308a или 1308b в прямом либо обратном направлении. При перемещении в прямом направлении плунжер инжектирует текучую среду в магистраль пациента или удаляет воздух из шприца в контейнер с жидкостью (например, бутыль). При перемещении в обратном направлении плунжер заполняет шприц 1308a, 1308b жидкостью из контейнера, содержащего жидкость. На Фигуре 13 показаны примеры двух таких контейнеров 1304 и 1306 с жидкостью. В одном варианте осуществления контейнер 1304 представляет собой емкость или бутыль, содержащую контрастный агент, а контейнер 1306 представляет собой емкость или бутыль, содержащую разбавляющее вещество, такое как соляной раствор. В других вариантах осуществления шприцы 1308a, 1308b (вместе с соответствующими плунжерами), каждый из которых является насосным устройством, могут каждый в отдельности или совместно содержать насосное устройство другого типа, способное инжектировать текучие среды с соответствующей скоростью потока/соответствующим давлением и т.д., например, такое как перистальтический насос или поршневой насос иного типа. Отдельное насосное устройство способно работать или функционировать в различных или многочисленных режимах. Например, насосное устройство может быть выполнено с возможностью прокачки текучей среды, будучи задействованным или запущенным в работу, для перемещения в первом направлении (например, вперед), при этом оно может быть также выполнено с возможностью перемещения во втором направлении (например, противоположном направлении, назад) для выполнения определенных функций. На Фигуре 13 показан ряд узлов запорных клапанов/обнаружения воздуха. Один узел 1310a запорного клапана/обнаружения воздуха подсоединен между контейнером 1306 с жидкостью и входным портом шприца 1308a, а второй узел 1312a запорного клапана/обнаружения воздуха подсоединен между выходным портом шприца 1308a и соединением с пациентом. Третий узел 1310b запорного клапана/обнаружения воздуха подсоединен между контейнером 1304 с жидкостью и входным портом шприца 1308b, а четвертый узел 1312b запорного клапана/обнаружения воздуха подсоединен между выходным портом шприца 1308b и соединением с пациентом. В варианте осуществления на Фигуре 13 каждый из шприцов 1308a, 1308b является шприцем с двумя портами. Текучая среда поступает и втягивается в шприц 1308a или 1308b из контейнера через входной порт шприца, а выходит и инжектируется из шприца 1308a или 1308b через выходной порт шприца.
Каждый запорный клапан в узле 1310a, 1310b, 1312a, 1312b запорного клапана/обнаружения воздуха может открываться и закрываться с помощью системы 1300 для управления соединением по текучей среде, ведущим к каждому из шприцов 1308a, 1308b или от них. Датчики обнаружения воздуха, присутствующие в узлах 1310a, 1310b, 1312a, 1312b, могут представлять собой оптические, акустические или иные датчики. Эти датчики помогают обнаружить воздух, который может находиться в соединениях по текучей среде, ведущих к шприцам 1308a, 1308b или от них. Когда один или несколько из этих датчиков генерируют сигнал, указывающий на возможное присутствие воздуха в линии подачи текучей среды, система 1300 может предупредить об этом пользователя или прервать процедуру инжекции. Использование множества запорных клапанов в системе 1300 позволяет системе 1300 в автоматическом режиме или при посредничестве пользователя избирательно управлять потоком текучей среды в шприцы 1308a, 1308b или от них путем открытия и закрытия трубок для потока текучей среды. В одном варианте осуществления система 1300 управляет каждым из запорных клапанов. Использование множества датчиков обнаружения воздуха способствует повышению общей безопасности системы 1300 за счет обнаружения возможного воздуха (колонн, пузырьков) в текучей среде (в трубке), ведущей к шприцам 1308a, 1308b или от них. Сигналы с детекторов воздуха направляются в систему 1300 и обрабатываются в ней, так что система 1300 может, например, выдать предупредительный сигнал или прервать процедуру инжекции в случае обнаружения воздуха. В примере на Фигуре 13 текучая среда сначала проходит через запорный клапан, а далее проходит через детектор воздуха в узлах 1310a, 1310b, 1312a, 1312b. В других вариантах осуществления могут использоваться иные конфигурации, порядок следования и т.п. в отношении запорных клапанов и детекторов воздуха в этих узлах. Кроме того, запорные клапаны могут быть заменены клапанами других типов.
Оператор может использовать панель 1302 управления для запуска или установки параметров системы 1300 для выполнения одной или нескольких процедур инжекции, а кроме того, может использовать панель 1302 управления для формирования одного или нескольких параметров (например, скорости потока, объема доставляемой текучей среды, предела давления, времени установления) отдельной процедуры инжекции. Оператор может также использовать панель 1302 для приостановки, возобновления или окончания процедуры инжекции и начала новой процедуры. Панель управления также отображает различную связанную с инжекцией информацию для оператора, такую как скорость потока, объем, давление, время установления, тип процедуры, данные о текучей среде, а также данные о пациенте. В одном варианте осуществления панель 1302 управления может быть соединена со столом для пациента, будучи при этом электрически соединенной с основным инжектором системы 1300. В данном варианте осуществления оператор может вручную переместить панель 1302 управления в требуемое положение, сохраняя при этом доступ к использованию всех функциональных возможностей, предоставляемых панелью 1302.
Система на Фигуре 13 также включает в себя клапан 1314, соединенный с обеими выходными магистралями от шприцов 1308a и 1308b. С выхода каждого из шприцов обеспечивается текучая среда, инжектируемая через трубку, которая проходит через узел 1312b или 1312b запорного клапана/обнаружения воздуха и далее следует на вход клапана 1314. В одном варианте осуществления одна из линий подачи текучей среды на клапан 1314 также включает в себя трансдьюсер давления. Выходной порт клапана 1314 соединен с трубчатым каналом высокого давления, используемым для направления текучей среды пациенту. В одном варианте осуществления клапан 1314 выполнен из гибкого материала, такого как эластомерный материал. Клапан 1314 позволяет подсоединить одну из линий подачи текучей среды (например, линию подачи контрастного вещества или линию подачи соляного раствора) к магистрали пациента (трубке высокого давления). Когда в шприцах 1308a и 1308b содержатся соответственно соляной раствор и контрастное вещество, клапан 1314 обеспечивает поступление контрастного вещества из шприца 1308b в магистраль пациента (при условии, что запорный клапан в узле 1312b открыт и не обнаружено присутствие воздуха), но блокирует поток соляного раствора из шприца 1308a в магистраль пациента. Трансдьюсер давления, соединенный с линией подачи соляного раствора (согласно одному варианту осуществления), также блокирован от магистрали пациента, что защищает трансдьюсер от воздействия высоких давлений при инжекции, которые могут сопровождать введение контрастного вещества. Когда введение контрастного вещества из шприца 1308b не происходит, клапан 1314 блокирует сообщение линии подачи контрастного вещества с магистралью пациента, но обеспечивает соединение между линией подачи соляного раствора из шприца 1306 и магистралью пациента. Шприц 1308a способен вводить соляной раствор пациенту (при условии, что запорный клапан в узле 1312a открыт и не обнаружено присутствие воздуха), при этом трансдьюсер давления также способен проводить мониторинг гемодинамических сигналов, поступающих от пациента посредством магистрали пациента, и генерировать характерные электронные сигналы на основе измеренных значений давления, которые могут быть обработаны системой 1300.
В одном варианте осуществления вспомогательная панель управления (не показана) обеспечивает выполнение подгруппы функций, выполняемых главной панелью 1302. Эта вспомогательная панель управления (которая в настоящем описании также называется «малой» панелью управления) может быть связана с инжектором в системе 1300. Согласно одному сценарию оператор может использовать малую панель для подготовки к работе инжектора. На малой панели могут отображаться руководящие указания по вводу установочных параметров, которые этому могут способствовать. На малой панели могут также отображаться определенные ошибки и информация о неполадках в помощь оператору. Например, малая панель может оповещать оператора о малом количественном содержании контрастного вещества или соляного раствора в резервуарах для жидкости и/или шприцах.
Как и система 1200 на Фигуре 12, система 1300 на Фигуре 13 может быть выполнена с возможностью соединения с устройством для доставки физиологического датчика согласно некоторым вариантам осуществления изобретения. Система 1300, например, может быть выполнена с возможностью приема физиологического сигнала, генерируемого датчиком 240 устройства 210. Обработка физиологического сигнала с датчика 240 (и/или с дополнительных датчиков устройства 210 для доставки датчика, если таковые существуют) может выполняться, например, в инжекционной системе 1200 или 1300. Формирование и/или обработка сигнала может, например, выполняться с помощью схемной платы или карты, которые могут являться дополнительными элементами в системе 1200 или 1300. Согласно некоторым вариантам осуществления изобретения такая плата формирования сигнала или карта могут обрабатывать «сырой» сигнал с датчика 240 и преобразовывать сигнал в стандартный аналоговый и/или цифровой сигнал, который может использоваться процессорами инжекционной системы. Обработанный сигнал может позволить инжекционной системе 1200 или 1300 отобразить параметры сигнала (например, форму волны давления) и/или выполнить алгоритмы и/или вычисления и отобразить результаты.
В вариантах осуществления, в которых физиологический сигнал с устройства 210 представляет собой сигнал давления, измеренного ниже по потоку от участка патологического изменения, связанного со стенозом (например, Pd), система 1300 может способствовать расчету величины FFR, например, поскольку значение Pp уже получено с помощью трансдьюсера давления системы 1300. Визуальное или графическое отображение рассчитанной величины FFR может быть предоставлено оператору, например, посредством панели 1302 управления или посредством малой панели управления (не показана), имеющей подгруппу функций, выполняемых панелью 1302. Поскольку при такой схеме могут быть получены мгновенные значения Pp и Pd, влияние синхронизации, отмеченное выше в отношении Фигуры 3, не создаст проблемы. Кроме того, в системе 1300 может выполняться осреднение по времени или другая обработка сигнала, чтобы создать математические варианты расчета величины FFR (например, с использованием средних, максимальных, минимальных и других значений).
На Фигуре 14 показана блок-схема последовательности операций способа, который может выполняться согласно одному варианту осуществления изобретения. Способы, представленные в настоящем описании, могут выполняться с различными уровнями автоматизации, например, благодаря хранению команд на машиночитаемом носителе и/или выполняться компьютером или процессором, связанным с механизированной инжекционной системой (такой как описаны выше в отношении Фигур 12 и 13 или иными сопоставимыми системами инжекции текучей среды). Способ, представленный на Фигуре 14, например, может использоваться для оценки степени ограничения, создаваемого потоку текучей среды у пациента, согласно некоторым вариантам осуществления изобретения. Данный способ может быть реализован с использованием различных механизированных инжекционных систем, таких как система 1200, показанная на Фигуре 12, или система 1300, показанная на Фигуре 13. Порядок следования операций, показанный на Фигуре 14, приведен лишь в качестве примера. В одном варианте осуществления механизированная инжекционная система может быть способна выполнить некоторые этапы способа, показанного на Фигуре 14, в автоматическом режиме или, в альтернативном варианте, после запроса оператора на начало реализации способа посредством активации вручную на панели управления (или вспомогательной панели, если таковая имеется).
Этап 1405 на Фигуре 14 содержит размещение проволочного направителя в теле пациента в целевое местоположение, такой как участок патологического изменения, связанного со стенозом, или, например, на клапане сердца. В некоторых вариантах осуществления это может быть диагностический проволочный направитель, при этом совместно с проволочным направителем пациенту может также вводиться направляющий катетер. Этап 1410 содержит размещение устройства для доставки датчика по проволочному направителю, так чтобы датчик располагался выше по потоку относительно целевого местоположения (например, выше по потоку относительно участка патологического изменения, связанного со стенозом, или на стороне высокого давления клапана). В некоторых вариантах осуществления в устройстве для доставки датчика имеется датчик, установленный на дистальном рукаве, который скользит по проволочному направителю, и проксимальный участок, который используется оператором для продвижения дистального рукава по проволочному направителю в целевое местоположение без необходимости в перемещении проволочного направителя. Этап 1415 содержит использование датчика устройства для доставки датчика для измерения значения физиологического параметра выше по потоку относительно целевого местоположения. В некоторых вариантах осуществления физиологический параметр представляет собой кровяное давление, при этом давление, измеренное датчиком выше по потоку относительно участка патологического изменения, связанного со стенозом, является проксимальным давлением, Pp.
Этап 1420 на Фигуре 14 содержит «нормализацию» измерения Pp, выполненного на этапе 1415, по измерению Pp, полученному от независимого источника. «Нормализация» измерения Pp соотносится с тем, что будет использован независимый источник (например, датчик потока текучей среды для мониторинга кровяного давления пациента в ходе процедуры) для получения значения Pp, используемого для дальнейших сравнений или вычислений со значением Pd (например, давлением ниже по потоку), измеренным датчиком устройства для доставки датчика. Этап нормализации главным образом позволяет убедиться, что значение Pp, измеренное датчиком, равно значению Pp, измеренному с использованием независимого источника, так что не привносится ошибка (или что такая ошибка минимальна), когда выполняется последующее измерение давления ниже по потоку (например, Pd). При необходимости каждое из значений Pp может быть отрегулировано, хотя часто может быть проще отрегулировать значение Pp, полученное на основе датчика, чтобы оно соответствовало значению Pp, полученному от независимого источника.
Этап 1425 содержит размещение устройства для доставки датчика по проволочному направителю, так чтобы датчик находился ниже по потоку от целевого местоположения (например, ниже по потоку от участка патологического изменения, связанного со стенозом). Этап 1430 содержит использование датчика устройства для доставки датчика для измерения значения физиологического параметра ниже по потоку. В некоторых вариантах осуществления данный этап содержит измерение кровяного давления ниже по потоку от участка патологического изменения, связанного со стенозом, Pd. Этап 1435 содержит сравнение измеренного значения ниже по потоку от целевого местоположения (например, кровяного давления Pd ниже по потоку) со значением, измеренным выше по потоку относительно целевого местоположения с использованием независимого источника (например, Pp). В некоторых вариантах осуществления сравнение, выполняемое на этапе 1435, может содержать расчет отношения двух измеренных значений. В одном предпочтительном варианте осуществления изобретения этап 1435 содержит расчет величины FFR в виде отношения кровяного давления ниже по потоку к кровяному давлению выше по потоку, Pd/Pp. Этап 1440, который может быть необязательным этапом, содержит обеспечение индикации результата сравнения, выполненного на этапе 1435. Например, этап 1440 может содержать обеспечение индикации вычисленного значения FFR (например, численное или графическое отображение или график) и/или оператору могут быть даны другие подсказки. Может быть создана цветовая индикация степени опасности патологического изменения, связанного со стенозом, например, красный индикатор - для значений FFR менее 0,75, и/или зеленый индикатор - для значений FFR, равных или превышающих 0,75. Возможны и другие примеры индикаторов, в том числе индикаторы невизуального типа - звуковая индикация, например звуковой сигнал тревоги, может предупредить оператора о том, что значение FFR составляет менее 0,75, что может побудить оператора принять оперативное решение о стратегии лечения.
На Фигуре 15 показана блок-схема последовательности операций способа, который может выполняться согласно одному варианту осуществления изобретения. Способ на Фигуре 15, например, может быть использован для оценки степени ограничения, создаваемого потоку текучей среды у пациента, согласно некоторым вариантам осуществления изобретения. В способе на Фигуре 15 используется устройство 210 для доставки датчика, имеющее первый и второй датчики 240, 242, такое как устройство 210, показанное на Фигурах 2 и 7. Данный способ также может быть реализован совместно с различными механизированными инжекционными системами, такими как система 1200, показанная на Фигуре 12, или система 1300, показанная на Фигуре 13. Порядок следования операций, показанный на Фигуре 15, приведен лишь в качестве примера.
Этап 1505 на Фигуре 15 содержит размещение проволочного направителя в теле пациента в целевом местоположении, таком как участок патологического изменения, связанного со стенозом, или, например, на клапане сердца. В некоторых вариантах осуществления проволочный направитель может представлять собой диагностический проволочный направитель, при этом совместно с проволочным направителем пациенту может также вводиться направляющий катетер. Этап 1510 содержит размещение устройства для доставки датчика по проволочному направителю, так чтобы первый датчик устройства для доставки датчика располагался выше по потоку относительно целевого местоположения, а второй датчик устройства для доставки датчика располагался ниже по потоку от целевого местоположения. В одном варианте осуществления, таком как описан выше в отношении Фигуры 7, далее может быть выполнен дополнительный этап, на котором проксимальный рукав 280 перемещается оператором относительно остальной части устройства 210 с целью изменения расстояния V между первым датчиком 240 и вторым датчиком 242. Следует отметить, что в варианте осуществления, таком как описан выше в отношении Фигуры 2, вдоль устройства 210 может быть установлено более двух датчиков, при этом, согласно некоторым вариантам осуществления изобретения, расстояние между смежными датчиками также может варьироваться. Этап 1515 содержит использование первого датчика для измерения значения физиологического параметра выше по потоку, а также использование второго датчика для измерения значения физиологического параметра ниже по потоку.
Этап 1535 содержит сравнение измеренного значения ниже по потоку от целевого местоположения (например, кровяного давления Pd ниже по потоку) со значением, измеренным выше по потоку относительно целевого местоположения (например, Pp). В некоторых вариантах осуществления сравнение, выполняемое на этапе 1535, может содержать расчет отношения двух измеренных значений. В одном предпочтительном варианте осуществления изобретения этап 1535 содержит расчет величины FFR в виде отношения кровяного давления ниже по потоку к кровяному давлению выше по потоку, Pd/Pp. Этап 1540, который может быть необязательным этапом, содержит обеспечение индикации результата сравнения, выполненного на этапе 1535. Например, этап 1540 может содержать обеспечение индикации вычисленного значения FFR (например, численное или графическое отображение или график) и/или оператору могут быть даны другие подсказки. Может быть создана цветовая индикация степени опасности патологического изменения, связанного со стенозом, например, красный индикатор - для значений FFR менее 0,75, и/или зеленый индикатор - для значений FFR, равных или превышающих 0,75. Возможны и другие примеры индикаторов, в том числе индикаторы невизуального типа - звуковая индикация, например звуковой сигнал тревоги, может предупредить оператора о том, что значение FFR составляет менее 0,75, что может побудить оператора принять оперативное решение о стратегии лечения.
Хотя и не показано на Фигурах 11, 14 и 15, каждый из этих способов может выполняться с вариантом осуществления устройства 210, в котором имеются проточные отверстия 224, таким как устройство на Фигурах 4(a) и 4(b). С использованием такого устройства способы при необходимости могут включать в себя этап, на котором оператор отводит назад проволочный направитель 230, чтобы позволить потоку текучей среды (например, току крови) поступать через отверстия 224 в просвет 222 для проволочного направителя дистального рукава 220. Выполнение этого дополнительного этапа до проведения измерения давления Pd ниже по потоку может уменьшить уровень сопротивления потоку, вызываемому самим устройством 210, и тем самым снизить ошибку измерения.
В некоторых вариантах осуществления способ может включать в себя обоснование решения о стратегии лечения на основе вычисленного значения величины FRR, например, если рассчитанное значение FRR меньше 0,75 - рекомендована и/или проводится интервенционная терапия. В некоторых вариантах осуществления устройство для интервенционной терапии может размещаться путем извлечения устройства 210 для доставки датчика и использования того же проволочного направителя 230 для размещения устройства для интервенционной терапии.
На Фигуре 16 показан вид в перспективе механизированной инжекционной системы, выполненной с возможностью соединения с устройством для доставки физиологического датчика согласно некоторым вариантам осуществления изобретения. На Фигуре 16 показано устройство 210 для доставки датчика, соединенное с механизированной инжекционной системой 1630 посредством разветвительной трубки 290 и соединителя 294. Инжекционная система 1630 выполнена с возможностью приема сигнала измерения физиологического параметра (например, кровяного давления) с устройства 210 через входной порт 1650. В предпочтительных вариантах осуществления этот сигнал представляет собой оптический сигнал, а соединитель 294 - волоконно-оптический SC-соединитель, выполненный с возможностью сопряжения с портом 1650 для принятия оптического сигнала.
Как показано на Фигуре 16, система 1630 имеет два контейнера 1632, 1634 для текучей среды, выполненных с возможностью подачи текучей среды по линиям 1633 и 1635. Текучая среда в линии 1633 (например, раствор контрастного вещества) может подаваться под существенно более высоким давлением, чем текучая среда в линии 1635 (например, соляной раствор). Клапан 1620 может использоваться для управления соединением между входными портами, ведущими в клапан 1620, и выходным портом, который, в конечном счете, ведет к пациенту через магистраль 1622 пациента. В одном варианте осуществления клапан 1620 включает в себя два входных порта, одни из которых соединен с линией 1633 подачи контрастного вещества, а другой - с линией 1635 подачи соляного раствора. Линия подачи соляного раствора соединена также с трансдьюсером 1618 давления для выдачи сигнала, например, представляющего кровяное давление пациента. Сигнал с трансдьюсера 1618 давления может поступать в систему 1630 посредством канала 1640 связи и соединителя 1642 или с помощью эквивалентного средства (например, связи в инфракрасном диапазоне, оптической связи и т.д.).
В одном варианте осуществления клапан 1620 обеспечивает соединение с магистралью 1622 пациента (трубкой высокого давления) либо линии подачи соляного раствора, либо линии подачи контрастного вещества. Когда система 1630 вводит контрастное вещество, например, клапан 1620 может позволить контрастному веществу поступать в магистраль 1622 пациента, блокируя при этом поступление соляного раствора в магистраль 1622 пациента. Клапан 1620 может функционировать так, что трансдьюсер 1618 давления может быть также заблокирован или изолирован от магистрали 1622 пациента в процессе инжекций под высоким давлением, например, для защиты трансдьюсера 1618 от воздействия высоких давлений при инжекции, которые могут сопровождать введение контрастного вещества. Когда введение контрастного вещества из системы 1630 не осуществляется, клапан 1620 может сработать на блокирование линии подачи контрастного вещества от магистрали 1622 пациента, открывая при этом сообщение по текучей среде между линией (трубкой) 1635 подачи соляного раствора и магистралью 1622 пациента. В этом положении система 1630 способна вводить пациенту соляной раствор, при этом трансдьюсер 1218 давления также способен осуществлять мониторинг гемодинамических сигналов, поступающих от пациента посредством магистрали 1622 пациента, и генерировать характерные сигналы на основе измеренных значений давления.
На Фигуре 16 показана панель 1602 управления, соединенная с инжекционной системой 1630 посредством канала 1660 связи. Оператор может взаимодействовать с системой 1630 с помощью панели 1602 управления (или вспомогательной панели, если таковая имеется), например, для просмотра и/или изменения параметров инжекции. В предпочтительном варианте осуществления изобретения система 1630 выполнена с возможностью приема сигналов давления одновременно с трансдьюсера 1618 давления и от устройства 210, которые соответственно представляют давления ниже и выше по потоку (например, Pd, Pp). Таким образом, в предпочтительном варианте осуществления система 1630 принимает сигналы, соответствующие Pd и Pp, по существу одновременно, сравнивает эти два сигнала (например, вычисляет FRR=Pd/Pp) и обеспечивает индикацию результата сравнения оператору с помощью экрана 1670 устройства отображения панели 1602 управления. Как указывалось выше, индикация результатов сравнения может выполняться в различных формах, в том числе цифровой, графической, в виде временных зависимостей и т.д. Индикация может проводиться по критерию «в пределах нормы/за пределами нормы», например, при этом один цветовой паттерн (например, красная иконка) будет указывать на значение FRR ниже определенного уровня (например, 0,75), а другой цветовой паттерн (например, зеленая иконка) - на значение FRR, равное или превышающее определенный уровень (например, 0,75). Согласно некоторым вариантам осуществления изобретения индикация может также выполняться в форме звукового сигнала тревоги.
На Фигуре 17 показан схематичный вид отображаемой информации (например, с помощью интерактивного графического интерфейса пользователя, или «GUI-интерфейса»), предназначенной для оператора, согласно некоторым вариантам осуществления изобретения. На Фигуре 17 показан GUI-экран, данные на который могут выводиться либо с помощью панели управления, которая имеется только применительно к устройству 210 для доставки датчика, либо с помощью панели управления устройства, выполненного с возможностью использования с устройством 210, такого как механизированные системы инжекции текучей среды, описанные выше в отношении Фигур 12, 13 и 16 (GUI-интерфейс может быть реализован средствами программного обеспечения, так что пользователь может видеть практически тот же самый экран вне зависимости от того, использовано ли автономное устройство отображения информации или интегрированная инжекционная система согласно различным вариантам осуществления изобретения).
На Фигуре 17 экран 1702 выполнен с возможностью отображения данных в различных формах (например, параметров волнового сигнала, численных данных, вычисленных значений, информации о пациенте, информации о статусе устройства и т.д.). Например, в предпочтительном варианте осуществления изобретения, пригодном для выполнения измерений величины FRR, форма колебаний кровяного давления может отображаться в виде функции времени как для проксимального давления Pp(t) 1704, так и для дистального давления Pd(t) 1706. В некоторых вариантах осуществления измерения систолического и диастолического давления крови могут накладываться на временной график проксимального (например, аортального) колебания давления, как обозначено позициями 1708 и 1710 соответственно, и/или могут рассчитываться в виде средних значений и отображаться по существу так, как обозначено позицией 1712. Точно так же средние значения проксимального давления 1704 и дистального давления 1706 могут быть рассчитаны (например, в виде взвешенных во времени средних величин, скользящих средних и т.д.) и отображены, как обозначено позициями 1714 и 1716 соответственно. Расчет величины FFR на основе проксимального давления 1704 и дистального давления 1706 может быть также проведен и отображен, как обозначено позицией 1718 (например, величина FFR равна Pp/Pd, а значения, используемые для Pp и Pd, могут быть средними значениями или иными статистическими или численными величинами) согласно некоторым вариантам осуществления изобретения. Кроме того, некоторые варианты осуществления могут содержать возможность предупреждения оператора о том, что значение FFR лежит за пределами нормального диапазона (например, составляет менее 0,75), например, чтобы обозначить необходимость принятия дополнительных мер (например, выбрать и провести интервенционную терапию). Это может выполняться в виде визуальной подсказки (например, цветового сигнала, как обозначено позицией 1720) или в виде звуковой подсказки (например, звукового сигнала тревоги).
На экране 1702 на Фигуре 17 показаны различные дополнительные элементы, которые могут быть включены (дополнительно или в порядке альтернативы) в состав различных вариантов осуществления. Область 1722 обозначения статуса, например, может предоставлять информацию о пациенте, день/время, участок организма для конкретного пациента, статус датчика, а также обозначение того, «нормализован» ли сигнал датчика с учетом другого сигнала мониторинга давления. Кнопка 1724 выполнения нормализации может быть включена в состав некоторых вариантов осуществления и может использоваться, например, для нормализации сигнала давления с датчика устройства 210 для доставки датчика. Нормализация может выполняться в ходе процедуры, в которой требуется измерить величину FFR (например, для оценки степени тяжести стеноза). Когда датчик устройства 210 для доставки датчика расположен выше по потоку относительно участка стеноза, давление, измеренное с помощью датчика, должно быть равно проксимальному давлению, измеренному с помощью стандартного оборудования для мониторинга давления крови (например, посредством трансдьюсера 1618 давления инжекционной системы, показанной на Фигуре 16). В одном варианте осуществления оператор располагает датчик 240 устройства 210 для доставки датчика выше по потоку относительно целевого местоположения и нажимает кнопку 1724 выполнения нормализации на экране 1702, что далее может обеспечить автоматическую регулировку или калибровку сигнала давления с датчика 240, чтобы он соответствовал проксимальному давлению, измеренному с помощью стандартного оборудования для мониторинга давления крови.
Экран 1702 на Фигуре 17 может также включать в себя элементы навигации в некоторых вариантах осуществления, что может позволить оператору просматривать и регистрировать представляющую интерес информацию. Например, кнопка 1726 управления курсором может позволить оператору расположить маркер или курсор 1727 в представляющей интерес точке на волновых кривых, что может предоставить измеренные мгновенные значения Pp(t) 1704 и Pd(t) 1706 в выбранный момент времени. В некоторых вариантах осуществления оператор может принять решение сохранить выделенные курсором данные путем нажатия кнопки 1728 «сохранить», что может сохранить выделенные данные для их просмотра позднее. В некоторых вариантах осуществления для этих целей может быть предусмотрена кнопка 1730 просмотра данных, что позволяет пользователю сравнить выполненные ранее измерения с текущими измерениями и использовать эту информацию для постановки диагноза и принятия решения о стратегии лечения. В некоторых вариантах осуществления может потребоваться обеспечить функцию изменения масштаба изображения, например для проведения анализа данных. Например, оператор может пожелать увеличить изображение (например, посредством стрелки «+» кнопки масштабирования 1732), чтобы рассмотреть более пристально некоторые данные, либо вместо этого может пожелать уменьшить изображение (например, посредством стрелки «-» кнопки масштабирования 1732), например, чтобы оценить общую тенденцию.
Устройство для доставки физиологического датчика было описано применительно к типовым вариантам осуществления и типовым предпочтительным вариантам осуществления и реализации, которые являются лишь примерами. Специалисты в данной области техники поймут, что можно легко модифицировать любой из вариантов осуществления или предпочтительных вариантов осуществления, по существу оставаясь в пределах объема притязаний прилагаемой формулы изобретения.
Claims (15)
1. Внутрисосудистое устройство для доставки датчика, содержащее:
дистальный рукав, имеющий просвет для проволочного направителя для скольжения по медицинскому проволочному направителю и приема отдельного медицинского проволочного направителя;
датчик, соединенный с устройством для доставки, при этом датчик выполнен с возможностью измерения физиологического параметра пациента и генерирования сигнала, отражающего этот физиологический параметр и используемого для расчета фракционного резерва кровотока; и проксимальный участок, имеющий основную секцию, и дистальный переходный участок, продолжающийся дистально от основной секции и соединенный с наружной поверхностью дистального рукава, при этом проксимальный участок содержит канал связи для передачи сигнала с датчика в местоположение вне пациента, причем проксимальный участок выполнен с возможностью содействия позиционированию датчика в анатомической структуре пациента.
дистальный рукав, имеющий просвет для проволочного направителя для скольжения по медицинскому проволочному направителю и приема отдельного медицинского проволочного направителя;
датчик, соединенный с устройством для доставки, при этом датчик выполнен с возможностью измерения физиологического параметра пациента и генерирования сигнала, отражающего этот физиологический параметр и используемого для расчета фракционного резерва кровотока; и проксимальный участок, имеющий основную секцию, и дистальный переходный участок, продолжающийся дистально от основной секции и соединенный с наружной поверхностью дистального рукава, при этом проксимальный участок содержит канал связи для передачи сигнала с датчика в местоположение вне пациента, причем проксимальный участок выполнен с возможностью содействия позиционированию датчика в анатомической структуре пациента.
2. Устройство по п.1, в котором дистальный рукав является, по существу, трубчатым, причем дистальный рукав предпочтительно содержит гибкую полиимидную трубку или гибкую трубку в виде микроспирали.
3. Устройство по п.2, в котором дистальный рукав содержит гибкую полиимидную трубку, имеющую размер для расположения в коронарной артерии пациента, в периферийной артерии пациента или на клапане сердца пациента.
4. Устройство по п.2, в котором дистальный рукав содержит гибкую полиимидную трубку, имеющую множество, по меньшей мере, частично круговых надрезов, расположенных по длине трубки.
5. Устройство по п.1, в котором дистальный рукав имеет одно или несколько проточных отверстий по длине дистального рукава, при этом одно или несколько проточных отверстий выполнены с возможностью обеспечения поступления потока текучей среды в просвет для проволочного направителя.
6. Устройство по п.1, в котором датчик выполнен с возможностью измерения кровяного давления и предпочтительно содержит одно из: волоконно-оптического датчика давления Фабри-Перо, пьезорезистивного датчика давления или емкостного датчика давления.
7. Устройство по п.1, в котором датчик расположен на дистальном конце дистального рукава на наружной поверхности дистального рукава.
8. Устройство по п.1, в котором датчик расположен в корпусе, размещенном на дистальном рукаве, при этом корпус выполнен с возможностью защиты датчика.
9. Устройство по п.8, в котором корпус имеет отверстие для текучей среды, при этом отверстие для текучей среды предпочтительно находится на боковом участке или на фронтальном участке корпуса.
10. Устройство по п.1, в котором проксимальный участок содержит гипотрубку из нержавеющей стали.
11. Устройство по п.1, в котором канал связи, по меньшей мере, частично расположен в соединительном просвете проксимального участка, причем канал связи предпочтительно содержит волоконно-оптическую среду или электропроводящую среду, по меньшей мере, частично расположенную в соединительном просвете.
12. Устройство по п.1, при этом устройство имеет второй датчик, причем второй датчик предпочтительно установлен на фиксированном расстоянии от упомянутого датчика и предпочтительно установлен на проксимальном участке.
13. Система инжекции текучей среды, содержащая:
трубку для подачи текучей среды, выполненную с возможностью обеспечения сообщения по текучей среде между инжекционной системой и пациентом;
панель управления; и
процессор;
при этом процессор выполнен с возможностью приема
(a) первого сигнала, отражающего кровяное давление, измеренное выше по потоку относительно целевого местоположения пациента, и
(b) второго сигнала, сгенерированного устройством для доставки датчика, при этом второй сигнал отражает кровяное давление, измеренное ниже по потоку от целевого местоположения пациента,
при этом панель управления выполнена с возможностью отображения информации, полученной из первого и второго сигналов, и устройство для доставки датчика содержит устройство по любому из пп.1-12.
трубку для подачи текучей среды, выполненную с возможностью обеспечения сообщения по текучей среде между инжекционной системой и пациентом;
панель управления; и
процессор;
при этом процессор выполнен с возможностью приема
(a) первого сигнала, отражающего кровяное давление, измеренное выше по потоку относительно целевого местоположения пациента, и
(b) второго сигнала, сгенерированного устройством для доставки датчика, при этом второй сигнал отражает кровяное давление, измеренное ниже по потоку от целевого местоположения пациента,
при этом панель управления выполнена с возможностью отображения информации, полученной из первого и второго сигналов, и устройство для доставки датчика содержит устройство по любому из пп.1-12.
14. Система по п.13, в которой датчик расположен на наружной поверхности проксимального участка.
15. Внутрисосудистое устройство для доставки датчика, содержащее:
мультипросветный стержень, имеющий просвет для проволочного направителя для скольжения по медицинскому проволочному направителю и приема отдельного медицинского проволочного направителя, а также просвет для датчика для приема с возможностью скольжения расположенного в нем стержня датчика;
первый датчик, соединенный со стержнем датчика, при этом первый датчик выполнен с возможностью измерения физиологического параметра пациента в дистальном местоположении и генерирования первого сигнала, отражающего этот физиологический параметр;
второй датчик, соединенный с наружным участком мультипросветного стержня, при этом второй датчик выполнен с возможностью измерения физиологического параметра пациента в проксимальном местоположении и генерирования второго сигнала, отражающего этот физиологический параметр; и
первый и второй каналы связи для передачи первого и второго сигналов с первого и второго датчиков в местоположение вне пациента, при этом первый и второй датчики выполнены с возможностью разнесения друг от друга на варьируемое расстояние на основе перемещения скольжением стержня датчика относительно мультипросветного стержня.
мультипросветный стержень, имеющий просвет для проволочного направителя для скольжения по медицинскому проволочному направителю и приема отдельного медицинского проволочного направителя, а также просвет для датчика для приема с возможностью скольжения расположенного в нем стержня датчика;
первый датчик, соединенный со стержнем датчика, при этом первый датчик выполнен с возможностью измерения физиологического параметра пациента в дистальном местоположении и генерирования первого сигнала, отражающего этот физиологический параметр;
второй датчик, соединенный с наружным участком мультипросветного стержня, при этом второй датчик выполнен с возможностью измерения физиологического параметра пациента в проксимальном местоположении и генерирования второго сигнала, отражающего этот физиологический параметр; и
первый и второй каналы связи для передачи первого и второго сигналов с первого и второго датчиков в местоположение вне пациента, при этом первый и второй датчики выполнены с возможностью разнесения друг от друга на варьируемое расстояние на основе перемещения скольжением стержня датчика относительно мультипросветного стержня.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US9621608P | 2008-09-11 | 2008-09-11 | |
| US61/096,216 | 2008-09-11 | ||
| PCT/US2009/056664 WO2010030882A1 (en) | 2008-09-11 | 2009-09-11 | Physiological sensor delivery device and method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2011113976A RU2011113976A (ru) | 2012-10-20 |
| RU2478338C2 true RU2478338C2 (ru) | 2013-04-10 |
Family
ID=42005495
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2011113976/14A RU2478338C2 (ru) | 2008-09-11 | 2009-09-11 | Устройство и способ доставки физиологического датчика |
Country Status (13)
| Country | Link |
|---|---|
| US (12) | US8298156B2 (ru) |
| EP (1) | EP2334227B1 (ru) |
| JP (2) | JP5746969B2 (ru) |
| KR (2) | KR101754570B1 (ru) |
| CN (1) | CN102202562B (ru) |
| AU (3) | AU2009291623B2 (ru) |
| BR (1) | BRPI0918563B8 (ru) |
| CA (4) | CA2734698C (ru) |
| ES (1) | ES2913941T3 (ru) |
| IL (2) | IL211659A (ru) |
| PL (1) | PL2334227T3 (ru) |
| RU (1) | RU2478338C2 (ru) |
| WO (1) | WO2010030882A1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2689023C2 (ru) * | 2013-09-30 | 2019-05-23 | Конинклейке Филипс Н.В. | Многоцелевая конструкция просвета для оптического восприятия геометрической формы |
Families Citing this family (263)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9867530B2 (en) | 2006-08-14 | 2018-01-16 | Volcano Corporation | Telescopic side port catheter device with imaging system and method for accessing side branch occlusions |
| US9622706B2 (en) | 2007-07-12 | 2017-04-18 | Volcano Corporation | Catheter for in vivo imaging |
| US9596993B2 (en) | 2007-07-12 | 2017-03-21 | Volcano Corporation | Automatic calibration systems and methods of use |
| US10219780B2 (en) | 2007-07-12 | 2019-03-05 | Volcano Corporation | OCT-IVUS catheter for concurrent luminal imaging |
| ES2913941T3 (es) * | 2008-09-11 | 2022-06-06 | Acist Medical Sys Inc | Dispositivo de implantación de sensores fisiológicos y sistema de inyección de fluido |
| CA2749026C (en) | 2008-09-29 | 2018-01-09 | Impala, Inc. | Heart valve |
| US8337541B2 (en) | 2008-10-01 | 2012-12-25 | Cardiaq Valve Technologies, Inc. | Delivery system for vascular implant |
| US9554774B2 (en) | 2008-12-08 | 2017-01-31 | Acist Medical Systems, Inc. | System and catheter for image guidance and methods thereof |
| WO2010100654A2 (en) * | 2009-01-30 | 2010-09-10 | Panduranga Revankar Krishna Prasad | A device to directly monitor intra ocular pressure by a person based on pattern and colour changes |
| WO2010105356A1 (en) * | 2009-03-17 | 2010-09-23 | Opsens Inc . | Eccentric pressure catheter with guidewire compatibility |
| US8414644B2 (en) | 2009-04-15 | 2013-04-09 | Cardiaq Valve Technologies, Inc. | Vascular implant and delivery system |
| SE534637C2 (sv) * | 2009-09-15 | 2011-11-01 | St Jude Medical Systems Ab | Snabbväxlingsguideenhet med trycksensor |
| WO2011044387A2 (en) * | 2009-10-07 | 2011-04-14 | The Board Of Regents Of The University Of Texas System | Pressure-sensing medical devices, systems and methods, and methods of forming medical devices |
| US8771289B2 (en) * | 2009-12-21 | 2014-07-08 | Acist Medical Systems, Inc. | Thrombus removal device and system |
| AU2014200116B2 (en) * | 2010-01-19 | 2015-09-03 | Lightlab Imaging, Inc. | Intravascular optical coherence tomography system with pressure monitoring interface and accessories |
| US8478384B2 (en) | 2010-01-19 | 2013-07-02 | Lightlab Imaging, Inc. | Intravascular optical coherence tomography system with pressure monitoring interface and accessories |
| GB2479340A (en) * | 2010-03-10 | 2011-10-12 | Imp Innovations Ltd | Method and apparatus for the measurement of a fluid flow restriction in a vessel |
| US8579964B2 (en) | 2010-05-05 | 2013-11-12 | Neovasc Inc. | Transcatheter mitral valve prosthesis |
| JP5922111B2 (ja) * | 2010-06-23 | 2016-05-24 | ピーツー−サイエンス・エペイエス | 充血剤注入と同時に血圧測定を行う診断目的の動脈用複合カテーテル |
| US20110319738A1 (en) * | 2010-06-29 | 2011-12-29 | Abbott Diabetes Care Inc. | Medical Devices and Insertion Systems and Methods |
| EP2637727B1 (en) | 2010-11-09 | 2024-02-07 | Opsens Inc. | Guidewire with internal pressure sensor |
| US11141063B2 (en) | 2010-12-23 | 2021-10-12 | Philips Image Guided Therapy Corporation | Integrated system architectures and methods of use |
| US9775982B2 (en) | 2010-12-29 | 2017-10-03 | Medtronic, Inc. | Implantable medical device fixation |
| US10112045B2 (en) | 2010-12-29 | 2018-10-30 | Medtronic, Inc. | Implantable medical device fixation |
| US11040140B2 (en) * | 2010-12-31 | 2021-06-22 | Philips Image Guided Therapy Corporation | Deep vein thrombosis therapeutic methods |
| US20120330156A1 (en) | 2010-12-31 | 2012-12-27 | Volcano Corporation | Pulmonary Embolism Therapeutic Methods Using Therapeutic Ablation Devices and Systems |
| GB201100137D0 (en) | 2011-01-06 | 2011-02-23 | Davies Helen C S | Apparatus and method of assessing a narrowing in a fluid tube |
| GB201100136D0 (en) * | 2011-01-06 | 2011-02-23 | Davies Helen C S | Apparatus and method of characterising a narrowing in a filled tube |
| US9107639B2 (en) * | 2011-03-15 | 2015-08-18 | Medicinsk Bildteknik Sverige Ab | System for synchronously visualizing a representation of first and second input data |
| US9308087B2 (en) | 2011-04-28 | 2016-04-12 | Neovasc Tiara Inc. | Sequentially deployed transcatheter mitral valve prosthesis |
| US9554897B2 (en) | 2011-04-28 | 2017-01-31 | Neovasc Tiara Inc. | Methods and apparatus for engaging a valve prosthesis with tissue |
| EP2706908B1 (en) | 2011-05-11 | 2019-07-10 | Acist Medical Systems, Inc. | Intravascular sensing system |
| CN106913358B (zh) | 2011-05-31 | 2021-08-20 | 光学实验室成像公司 | 多模式成像系统、设备和方法 |
| US9532722B2 (en) | 2011-06-21 | 2017-01-03 | Masimo Corporation | Patient monitoring system |
| US9986919B2 (en) | 2011-06-21 | 2018-06-05 | Masimo Corporation | Patient monitoring system |
| US9314584B1 (en) | 2011-06-27 | 2016-04-19 | Bayer Healthcare Llc | Method and apparatus for fractional flow reserve measurements |
| US9339348B2 (en) * | 2011-08-20 | 2016-05-17 | Imperial Colege of Science, Technology and Medicine | Devices, systems, and methods for assessing a vessel |
| WO2013028612A2 (en) * | 2011-08-20 | 2013-02-28 | Volcano Corporation | Devices, systems, and methods for visually depicting a vessel and evaluating treatment options |
| US10888232B2 (en) * | 2011-08-20 | 2021-01-12 | Philips Image Guided Therapy Corporation | Devices, systems, and methods for assessing a vessel |
| WO2013033592A1 (en) | 2011-08-31 | 2013-03-07 | Volcano Corporation | Optical-electrical rotary joint and methods of use |
| US20130066197A1 (en) * | 2011-09-13 | 2013-03-14 | Celine Pruvot | System and method for blood vessel stenosis visualization and navigation |
| US9854981B2 (en) | 2011-10-14 | 2018-01-02 | Acist Medical Systems, Inc. | Device and methods for measuring and treating an anatomical structure |
| US10463259B2 (en) | 2011-10-28 | 2019-11-05 | Three Rivers Cardiovascular Systems Inc. | System and apparatus comprising a multi-sensor catheter for right heart and pulmonary artery catheterization |
| US20140243688A1 (en) * | 2011-10-28 | 2014-08-28 | Three Rivers Cardiovascular Systems Inc. | Fluid temperature and flow sensor apparatus and system for cardiovascular and other medical applications |
| SE537177C2 (sv) * | 2011-10-28 | 2015-02-24 | St Jude Medical Systems Ab | Medicinskt system för bestämning av Fractional Flow Reserve(FFR) värdet |
| US20130109980A1 (en) * | 2011-11-01 | 2013-05-02 | Tat-Jin Teo | Systems and methods for a wireless vascular pressure measurement device |
| US10736519B2 (en) * | 2012-01-19 | 2020-08-11 | Philips Image Guided Therapy Corporation | Interface devices, systems, and methods for use with intravascular pressure monitoring devices |
| US9084539B2 (en) * | 2012-02-02 | 2015-07-21 | Volcano Corporation | Wireless pressure wire system with integrated power |
| US9854982B2 (en) | 2012-03-26 | 2018-01-02 | Medtronic, Inc. | Implantable medical device deployment within a vessel |
| US9833625B2 (en) | 2012-03-26 | 2017-12-05 | Medtronic, Inc. | Implantable medical device delivery with inner and outer sheaths |
| US9339197B2 (en) | 2012-03-26 | 2016-05-17 | Medtronic, Inc. | Intravascular implantable medical device introduction |
| US9717421B2 (en) | 2012-03-26 | 2017-08-01 | Medtronic, Inc. | Implantable medical device delivery catheter with tether |
| US10485435B2 (en) | 2012-03-26 | 2019-11-26 | Medtronic, Inc. | Pass-through implantable medical device delivery catheter with removeable distal tip |
| US9220906B2 (en) | 2012-03-26 | 2015-12-29 | Medtronic, Inc. | Tethered implantable medical device deployment |
| JP6139510B2 (ja) | 2012-03-29 | 2017-05-31 | テルモ株式会社 | 画像診断装置及びプローブ |
| US20130274618A1 (en) * | 2012-04-17 | 2013-10-17 | Boston Scientific Scimed, Inc. | Guidewire system for use in transcatheter aortic valve implantation procedures |
| US9549679B2 (en) | 2012-05-14 | 2017-01-24 | Acist Medical Systems, Inc. | Multiple transducer delivery device and method |
| JP6173438B2 (ja) | 2012-05-14 | 2017-08-02 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 血管の狭窄のための冠血流予備量比(ffr)値の決定 |
| US10506934B2 (en) | 2012-05-25 | 2019-12-17 | Phyzhon Health Inc. | Optical fiber pressure sensor |
| US9345573B2 (en) | 2012-05-30 | 2016-05-24 | Neovasc Tiara Inc. | Methods and apparatus for loading a prosthesis onto a delivery system |
| CN104349715B (zh) * | 2012-06-08 | 2018-02-16 | 皇家飞利浦有限公司 | 用于对生理特征的参考的分布式感测设备 |
| EP2866646A1 (en) * | 2012-06-29 | 2015-05-06 | Boston Scientific Scimed, Inc. | Pressure sensing guidewire |
| EP2874536B1 (en) * | 2012-07-20 | 2018-03-21 | Endophys Holdings, LLC | Transducer interface system and method |
| US9241641B2 (en) * | 2012-07-20 | 2016-01-26 | Acist Medical Systems, Inc. | Fiber optic sensor assembly for sensor delivery device |
| JP6235013B2 (ja) * | 2012-08-06 | 2017-11-22 | ウェリンク・メディカル・ベスローテン・フェンノートシャップ | 圧力センサカテーテルおよび関連する方法 |
| CN104582572B (zh) * | 2012-08-16 | 2018-04-13 | 东芝医疗系统株式会社 | 图像处理装置、医用图像诊断装置以及血压监视器 |
| EP2887863B1 (en) | 2012-08-27 | 2019-11-27 | Boston Scientific Scimed, Inc. | Pressure-sensing medical device system |
| WO2014036477A1 (en) | 2012-08-31 | 2014-03-06 | Volcano Corporation | Pressure sensing intravascular devices with reduced drift and associated systems and methods |
| US9265473B2 (en) | 2012-09-25 | 2016-02-23 | The Johns Hopkins University | Method for estimating flow rates and pressure gradients in arterial networks from patient specific computed tomography angiogram-based contrast distribution data |
| EP3571998B1 (en) | 2012-09-25 | 2021-02-17 | The Johns Hopkins University | A method for estimating flow rates, pressure gradients, coronary flow reserve, and fractional flow reserve from patient specific computed tomography angiogram-based contrast distribution data |
| US9307926B2 (en) | 2012-10-05 | 2016-04-12 | Volcano Corporation | Automatic stent detection |
| US10568586B2 (en) | 2012-10-05 | 2020-02-25 | Volcano Corporation | Systems for indicating parameters in an imaging data set and methods of use |
| CA2887421A1 (en) | 2012-10-05 | 2014-04-10 | David Welford | Systems and methods for amplifying light |
| US9858668B2 (en) | 2012-10-05 | 2018-01-02 | Volcano Corporation | Guidewire artifact removal in images |
| US9324141B2 (en) | 2012-10-05 | 2016-04-26 | Volcano Corporation | Removal of A-scan streaking artifact |
| US9367965B2 (en) | 2012-10-05 | 2016-06-14 | Volcano Corporation | Systems and methods for generating images of tissue |
| US10070827B2 (en) | 2012-10-05 | 2018-09-11 | Volcano Corporation | Automatic image playback |
| US9286673B2 (en) | 2012-10-05 | 2016-03-15 | Volcano Corporation | Systems for correcting distortions in a medical image and methods of use thereof |
| US11272845B2 (en) | 2012-10-05 | 2022-03-15 | Philips Image Guided Therapy Corporation | System and method for instant and automatic border detection |
| US9292918B2 (en) | 2012-10-05 | 2016-03-22 | Volcano Corporation | Methods and systems for transforming luminal images |
| US9840734B2 (en) | 2012-10-22 | 2017-12-12 | Raindance Technologies, Inc. | Methods for analyzing DNA |
| JP6419425B2 (ja) * | 2012-11-29 | 2018-11-07 | キヤノンメディカルシステムズ株式会社 | 血流機能検査装置、及び、x線診断装置 |
| US9175944B2 (en) | 2012-12-10 | 2015-11-03 | The Johns Hopkins University | Durable single mode fiber probe with optimized reference reflectivity |
| WO2014093197A1 (en) * | 2012-12-11 | 2014-06-19 | Covidien Lp | Systems for diagnosing and/or treating medical conditions |
| WO2014093121A1 (en) * | 2012-12-12 | 2014-06-19 | Edwards Lifesciences Corporation | Analyte sensing system and method for controlling presentation of information |
| WO2014093170A1 (en) * | 2012-12-12 | 2014-06-19 | Edwards Lifesciences Corporation | System and method for detecting occlusions in a blood access device |
| US9717422B2 (en) * | 2012-12-12 | 2017-08-01 | Volcano Corporation | Sheath with optically interrogatable sensors |
| CA2894403A1 (en) | 2012-12-13 | 2014-06-19 | Volcano Corporation | Devices, systems, and methods for targeted cannulation |
| US9709379B2 (en) | 2012-12-20 | 2017-07-18 | Volcano Corporation | Optical coherence tomography system that is reconfigurable between different imaging modes |
| US10939826B2 (en) | 2012-12-20 | 2021-03-09 | Philips Image Guided Therapy Corporation | Aspirating and removing biological material |
| JP6785554B2 (ja) | 2012-12-20 | 2020-11-18 | ボルケーノ コーポレイション | 平滑遷移カテーテル |
| US10942022B2 (en) | 2012-12-20 | 2021-03-09 | Philips Image Guided Therapy Corporation | Manual calibration of imaging system |
| CA2895770A1 (en) | 2012-12-20 | 2014-07-24 | Jeremy Stigall | Locating intravascular images |
| US11406498B2 (en) | 2012-12-20 | 2022-08-09 | Philips Image Guided Therapy Corporation | Implant delivery system and implants |
| US20140180030A1 (en) * | 2012-12-20 | 2014-06-26 | Volcano Corporation | Intravascular blood pressure and velocity wire |
| US10166003B2 (en) | 2012-12-21 | 2019-01-01 | Volcano Corporation | Ultrasound imaging with variable line density |
| US9486143B2 (en) | 2012-12-21 | 2016-11-08 | Volcano Corporation | Intravascular forward imaging device |
| US10058284B2 (en) | 2012-12-21 | 2018-08-28 | Volcano Corporation | Simultaneous imaging, monitoring, and therapy |
| CA2895777A1 (en) * | 2012-12-21 | 2014-06-26 | Volcano Corporation | Wireless interface devices, systems, and methods for use with intravascular pressure monitoring devices |
| CA2895332A1 (en) * | 2012-12-21 | 2014-06-26 | David Anderson | Multi-sensor devices |
| JP6363095B2 (ja) * | 2012-12-21 | 2018-07-25 | ボルケーノ コーポレイション | 処理システム及び該処理システムの作動方法 |
| US10413317B2 (en) | 2012-12-21 | 2019-09-17 | Volcano Corporation | System and method for catheter steering and operation |
| WO2014099672A1 (en) | 2012-12-21 | 2014-06-26 | Andrew Hancock | System and method for multipath processing of image signals |
| JP2016508233A (ja) | 2012-12-21 | 2016-03-17 | ナサニエル ジェイ. ケンプ, | 光学スイッチを用いた電力効率のよい光学バッファリング |
| US9612105B2 (en) | 2012-12-21 | 2017-04-04 | Volcano Corporation | Polarization sensitive optical coherence tomography system |
| JP2016507892A (ja) | 2012-12-21 | 2016-03-10 | デイビッド ウェルフォード, | 光の波長放出を狭幅化するためのシステムおよび方法 |
| WO2014100606A1 (en) | 2012-12-21 | 2014-06-26 | Meyer, Douglas | Rotational ultrasound imaging catheter with extended catheter body telescope |
| EP2936426B1 (en) | 2012-12-21 | 2021-10-13 | Jason Spencer | System and method for graphical processing of medical data |
| WO2014106186A1 (en) | 2012-12-31 | 2014-07-03 | Volcano Corporation | Devices, systems, and methods for assessment of vessels |
| EP2938253B1 (en) * | 2012-12-31 | 2021-03-24 | Philips Image Guided Therapy Corporation | Guidewire with an in-wall hypotube sensor mount and the associated manufacturing method |
| US9757591B2 (en) | 2013-02-11 | 2017-09-12 | Bayer Healthcare Llc | Methods and systems for monitoring an automated infusion system |
| KR101453918B1 (ko) * | 2013-03-05 | 2014-11-03 | 주식회사 덴티스 | 혈압 측정장치 및 그 제어방법 |
| WO2014138555A1 (en) | 2013-03-07 | 2014-09-12 | Bernhard Sturm | Multimodal segmentation in intravascular images |
| US10226597B2 (en) | 2013-03-07 | 2019-03-12 | Volcano Corporation | Guidewire with centering mechanism |
| US10583002B2 (en) | 2013-03-11 | 2020-03-10 | Neovasc Tiara Inc. | Prosthetic valve with anti-pivoting mechanism |
| US20140276923A1 (en) | 2013-03-12 | 2014-09-18 | Volcano Corporation | Vibrating catheter and methods of use |
| WO2014164696A1 (en) | 2013-03-12 | 2014-10-09 | Collins Donna | Systems and methods for diagnosing coronary microvascular disease |
| WO2014159819A1 (en) | 2013-03-13 | 2014-10-02 | Jinhyoung Park | System and methods for producing an image from a rotational intravascular ultrasound device |
| US11026591B2 (en) * | 2013-03-13 | 2021-06-08 | Philips Image Guided Therapy Corporation | Intravascular pressure sensor calibration |
| US9301687B2 (en) | 2013-03-13 | 2016-04-05 | Volcano Corporation | System and method for OCT depth calibration |
| US10219887B2 (en) | 2013-03-14 | 2019-03-05 | Volcano Corporation | Filters with echogenic characteristics |
| US10292677B2 (en) | 2013-03-14 | 2019-05-21 | Volcano Corporation | Endoluminal filter having enhanced echogenic properties |
| US10426590B2 (en) | 2013-03-14 | 2019-10-01 | Volcano Corporation | Filters with echogenic characteristics |
| US9681951B2 (en) | 2013-03-14 | 2017-06-20 | Edwards Lifesciences Cardiaq Llc | Prosthesis with outer skirt and anchors |
| WO2014143816A1 (en) * | 2013-03-15 | 2014-09-18 | Volcano Corporation | Devices, systems, and methods for preservation of arteriovenous access sites |
| EP2967497A4 (en) * | 2013-03-15 | 2016-11-30 | Volcano Corp | UNIVERSAL PATIENT INTERFACE MODULE AND DEVICES, SYSTEMS, AND RELATED METHODS |
| US9580302B2 (en) * | 2013-03-15 | 2017-02-28 | Versana Micro Inc. | Cell phone having a monolithically integrated multi-sensor device on a semiconductor substrate and method therefor |
| WO2014149688A1 (en) | 2013-03-15 | 2014-09-25 | Boston Scientific Scimed, Inc. | Pressure sensing guidewire |
| WO2014151830A1 (en) * | 2013-03-15 | 2014-09-25 | Volcano Corporation | Interface devices, systems, and methods for use with intravascular pressure monitoring devices |
| US9572665B2 (en) | 2013-04-04 | 2017-02-21 | Neovasc Tiara Inc. | Methods and apparatus for delivering a prosthetic valve to a beating heart |
| WO2014190195A1 (en) | 2013-05-22 | 2014-11-27 | Boston Scientific Scimed, Inc. | Pressure sensing guidewire systems including an optical connector cable |
| US10835183B2 (en) | 2013-07-01 | 2020-11-17 | Zurich Medical Corporation | Apparatus and method for intravascular measurements |
| JP5976983B1 (ja) * | 2013-07-01 | 2016-08-24 | ズーリック・メディカル・コーポレイションZurich Medical Corporation | 血管内測定のための装置および方法 |
| ES2856009T3 (es) * | 2013-07-18 | 2021-09-27 | Endophys Holdings Llc | Sistema y método de análisis de la presión arterial |
| EP3021758A4 (en) | 2013-07-19 | 2017-03-15 | Volcano Corporation | Devices, systems, and methods for assessment of vessels |
| JP6189540B2 (ja) | 2013-07-26 | 2017-08-30 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 応力誘起圧力オフセットを最小限にするffrセンサ・ヘッド設計 |
| WO2015020911A2 (en) | 2013-08-05 | 2015-02-12 | Cercacor Laboratories, Inc. | Blood pressure monitor with valve-chamber assembly |
| JP6243033B2 (ja) | 2013-08-14 | 2017-12-06 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | テーパー状コアを有する光ファイバを備えた医療装置システム |
| CN105474264B (zh) * | 2013-08-21 | 2019-08-06 | 皇家飞利浦有限公司 | 用于交互地分割在血管造影图像数据中的血管的分割装置 |
| WO2015051003A1 (en) | 2013-10-04 | 2015-04-09 | Vascular Imaging Corporation | Imaging techniques using an imaging guidewire |
| WO2015057518A1 (en) | 2013-10-14 | 2015-04-23 | Boston Scientific Scimed, Inc. | Pressure sensing guidewire and methods for calculating fractional flow reserve |
| BR112016008854B1 (pt) * | 2013-10-25 | 2021-07-06 | Kephalios S.A.S. | anel de anuloplastia ajustável e sistema |
| EP2865326A1 (en) * | 2013-10-25 | 2015-04-29 | Sinvent AS | In-vivo pressure monitoring system |
| EP3060109B1 (en) * | 2013-10-25 | 2019-03-13 | Boston Scientific Scimed, Inc. | Catheter systems for determining blood flow rates with optical sensing |
| JP6782634B2 (ja) * | 2013-10-25 | 2020-11-11 | ボルケーノ コーポレイション | 患者の血管を評価する際の支援のために前記血管の情報を提供するためのシステム |
| US9877660B2 (en) | 2013-11-14 | 2018-01-30 | Medtronic Vascular Galway | Systems and methods for determining fractional flow reserve without adenosine or other pharmalogical agent |
| US10130269B2 (en) | 2013-11-14 | 2018-11-20 | Medtronic Vascular, Inc | Dual lumen catheter for providing a vascular pressure measurement |
| US20150141853A1 (en) * | 2013-11-15 | 2015-05-21 | Acist Medical Systems, Inc. | Multi-sensor lesion assessment device and method |
| US10537255B2 (en) | 2013-11-21 | 2020-01-21 | Phyzhon Health Inc. | Optical fiber pressure sensor |
| CN105813553B (zh) * | 2013-12-06 | 2021-03-26 | 火山公司 | 用于评估血管内压力的装置、系统和方法 |
| US11006840B2 (en) | 2013-12-06 | 2021-05-18 | Philips Image Guided Therapy Corporation | Device, system, and method for assessing intravascular pressure |
| EP3082585A4 (en) * | 2013-12-19 | 2016-12-28 | Volcano Corp | DEVICE, SYSTEM AND METHOD FOR EVALUATING INTRAVASCULAR PRESSURE |
| AU2014370411A1 (en) * | 2013-12-23 | 2016-07-21 | Guided Interventions, Inc. | System for detection of fluid pressure using a pressure sensing capacitive sensor |
| US9713456B2 (en) * | 2013-12-30 | 2017-07-25 | Acist Medical Systems, Inc. | Position sensing in intravascular imaging |
| US9913585B2 (en) | 2014-01-15 | 2018-03-13 | Medtronic Vascular, Inc. | Catheter for providing vascular pressure measurements |
| EP3136955A1 (en) * | 2014-01-16 | 2017-03-08 | Volcano Corporation | Devices, systems, and methods for assessing a vessel |
| US9539090B2 (en) | 2014-01-16 | 2017-01-10 | Cook Medical Technologies Llc | Transaortic valve access device |
| US9974443B2 (en) | 2014-02-20 | 2018-05-22 | Koninklijke Philips N.V. | Devices, systems, and methods and associated display screens for assessment of vessels |
| WO2015138555A2 (en) * | 2014-03-11 | 2015-09-17 | The Johns Hopkins University | A method for estimating flow rates and pressure gradients in arterial networks from patient specific computed tomography angiogram-based contrast distribution data |
| WO2015142623A1 (en) * | 2014-03-18 | 2015-09-24 | Boston Scientific Scimed, Inc. | Pressure sensing guidewires |
| US20150272449A1 (en) * | 2014-03-26 | 2015-10-01 | Volcano Corporation | Hybrid Intravascular Pressure Measurement Devices and Associated Systems and Methods |
| CA2944114C (en) * | 2014-04-04 | 2023-09-26 | St. Jude Medical Systems Ab | Intravascular pressure and flow data diagnostic systems, devices, and methods |
| CN106456277B (zh) | 2014-04-17 | 2020-03-27 | 波士顿科学国际有限公司 | 自清洗光连接器 |
| WO2015164250A1 (en) | 2014-04-21 | 2015-10-29 | Koninklijke Philips N.V. | Intravascular devices, systems, and methods having separate sections with engaged core components |
| JP6741588B2 (ja) | 2014-04-23 | 2020-08-19 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 撮像および圧力感知のための統合されたコントローラをもつカテーテル |
| US20170215970A1 (en) | 2014-05-01 | 2017-08-03 | St. Jude Medical, Cardiology Division, Inc. | Depicting force |
| USD761808S1 (en) | 2014-05-01 | 2016-07-19 | St. Jude Medical, Cardiology Division, Inc. | Display screen with transitional graphical user interface |
| USD761313S1 (en) * | 2014-05-01 | 2016-07-12 | St. Jude Medical, Cardiology Division, Inc. | Display screen with a transitional graphical user interface |
| US10709357B2 (en) | 2014-05-02 | 2020-07-14 | Koninklijke Philips N.V. | Device, system, and method for assessing intravascular pressure |
| USD794068S1 (en) * | 2014-05-07 | 2017-08-08 | Roche Diabetes Care, Inc. | Display screen with continuous glucose monitor icon |
| CN103932694A (zh) * | 2014-05-07 | 2014-07-23 | 霍云龙 | 精确诊断心肌血流储备分数(ffr)的方法和设备 |
| JP6875857B2 (ja) | 2014-05-15 | 2021-05-26 | ノヴァルング ゲーエムベーハー | 医療技術的測定システム、及び前記測定システムの製造方法 |
| JP6636943B2 (ja) | 2014-05-15 | 2020-01-29 | ノヴァラング ゲゼルシャフト ミット ベシュレンクテル ハフツング | 医療技術的測定装置、及び測定方法 |
| CN106659393B (zh) | 2014-06-04 | 2021-02-19 | 波士顿科学国际有限公司 | 压力偏移减少的压力感测导丝系统 |
| US10244951B2 (en) * | 2014-06-10 | 2019-04-02 | Acist Medical Systems, Inc. | Physiological sensor delivery device and method |
| US11330989B2 (en) | 2014-06-16 | 2022-05-17 | Medtronic Vascular, Inc. | Microcatheter sensor design for mounting sensor to minimize induced strain |
| US10201284B2 (en) | 2014-06-16 | 2019-02-12 | Medtronic Vascular Inc. | Pressure measuring catheter having reduced error from bending stresses |
| US10973418B2 (en) | 2014-06-16 | 2021-04-13 | Medtronic Vascular, Inc. | Microcatheter sensor design for minimizing profile and impact of wire strain on sensor |
| WO2016005944A1 (en) | 2014-07-11 | 2016-01-14 | Koninklijke Philips N.V. | Devices, systems, and methods for treatment of vessels |
| CN106659394A (zh) | 2014-07-13 | 2017-05-10 | 三河城心血管系统有限公司 | 用于介入性心脏病学的包括多传感器导丝的系统和装置 |
| US10849511B2 (en) | 2014-07-14 | 2020-12-01 | Philips Image Guided Therapy Corporation | Devices, systems, and methods for assessment of vessels |
| WO2016008809A1 (en) * | 2014-07-15 | 2016-01-21 | Koninklijke Philips N.V. | Devices, systems, and methods and associated display screens for assessment of vessels with multiple sensing components |
| CN106714675B (zh) * | 2014-08-01 | 2020-03-20 | 波士顿科学国际有限公司 | 压力传感导丝 |
| US11311200B1 (en) | 2014-08-27 | 2022-04-26 | Lightlab Imaging, Inc. | Systems and methods to measure physiological flow in coronary arteries |
| ES2912027T3 (es) * | 2014-08-27 | 2022-05-24 | St Jude Medical Systems Ab | Sistema para evaluar un sistema cardíaco al determinar la relación mínima de PD/PA (presión distal/presión arterial) |
| WO2016038493A1 (en) | 2014-09-11 | 2016-03-17 | Koninklijke Philips N.V. | Bedside controller for assessment of vessels and associated devices, systems, and methods |
| CA2961757C (en) * | 2014-09-28 | 2023-10-03 | Potrero Medical, Inc. | Systems, devices and methods for sensing physiologic data and draining and analyzing bodily fluids |
| US10080872B2 (en) * | 2014-11-04 | 2018-09-25 | Abbott Cardiovascular Systems Inc. | System and method for FFR guidewire recovery |
| DE102014116221B4 (de) * | 2014-11-06 | 2019-05-23 | Ferton Holding S.A. | Überwachungssystem und Verfahren zur Überwachung |
| US10258240B1 (en) | 2014-11-24 | 2019-04-16 | Vascular Imaging Corporation | Optical fiber pressure sensor |
| JP6550463B2 (ja) | 2014-12-05 | 2019-07-24 | ボストン サイエンティフィック サイムド,インコーポレイテッドBoston Scientific Scimed,Inc. | 圧力感知のための医療装置及びその製造方法 |
| US10194812B2 (en) | 2014-12-12 | 2019-02-05 | Medtronic Vascular, Inc. | System and method of integrating a fractional flow reserve device with a conventional hemodynamic monitoring system |
| WO2016117238A1 (ja) * | 2015-01-23 | 2016-07-28 | テルモ株式会社 | ガイドワイヤ |
| WO2016168403A1 (en) * | 2015-04-15 | 2016-10-20 | Sanford Health | Pulmonary embolism apparatus |
| RU2613086C2 (ru) * | 2015-05-08 | 2017-03-15 | Общество с ограниченной ответственностью "М-ЛАЙН" (ООО "М-ЛАЙН") | Устройство для длительного инвазивного дистанционного контроля состояния и критических изменений сердечно-сосудистой системы у пациентов с коморбидностью |
| CN107920764B (zh) * | 2015-07-17 | 2021-09-21 | 皇家飞利浦有限公司 | 用于评估脉管的设备、系统和方法 |
| US20180214083A1 (en) * | 2015-08-03 | 2018-08-02 | Medyria Ag | Curved sensorized catheter |
| CN117653061A (zh) * | 2015-09-04 | 2024-03-08 | 波士顿科学国际有限公司 | 压力传感导丝 |
| US10067112B2 (en) | 2015-09-30 | 2018-09-04 | Battelle Memorial Institute | Autonomous sensor fish to support advanced hydropower development |
| EP3159026A1 (de) | 2015-10-23 | 2017-04-26 | novalung GmbH | Zwischenelement für eine medizintechnische extrakorporale fluidleitung, medizintechnisches extrakorporales fluidsystem und verfahren zum messen eines in einem medizintechnischen extrakorporalen fluidsystem geführten fluid des menschlichen oder tierischen körpers enthaltenen gases |
| US10722690B2 (en) | 2015-12-28 | 2020-07-28 | Boston Scientific Scimed, Inc. | Medical devices with antithrombogenic coatings |
| US10376678B2 (en) | 2016-01-08 | 2019-08-13 | Makaha Medical, Llc. | Systems and methods for controlling reperfusion in a vessel |
| WO2017131801A2 (en) | 2016-01-29 | 2017-08-03 | Acist Medical Systems, Inc. | Medicant-releasing intravascular components and methods |
| WO2017136746A1 (en) | 2016-02-03 | 2017-08-10 | Cormetrics Llc | Modular sensing guidewire |
| EP3419514B1 (en) | 2016-02-23 | 2023-08-23 | Boston Scientific Scimed, Inc. | Pressure sensing guidewire systems including an optical connector cable |
| US10595818B2 (en) | 2016-03-19 | 2020-03-24 | Makaha Medical, Llc. | Medical systems and methods for density assessment using ultrasound |
| US11076808B2 (en) * | 2016-03-26 | 2021-08-03 | Makaha Medical, LLC | Flexible medical device with marker band and sensor |
| JP2017176719A (ja) * | 2016-03-31 | 2017-10-05 | 日本ゼオン株式会社 | カテーテル |
| US10667698B2 (en) * | 2016-05-12 | 2020-06-02 | Masayoshi Yoshida | Methods for estimating post-PCI fractional flow reserve |
| CN109561879B (zh) | 2016-05-19 | 2022-03-29 | 阿西斯特医疗系统有限公司 | 血管内过程中的位置感测 |
| WO2017201287A1 (en) | 2016-05-19 | 2017-11-23 | Acist Medical Systems, Inc. | Position sensing in intravascular processes |
| CN109475303A (zh) * | 2016-07-14 | 2019-03-15 | 皇家飞利浦有限公司 | 用于对血管中的性质测量结果的质量进行反馈的装置、系统和方法 |
| EP3490444B1 (en) * | 2016-07-28 | 2023-06-07 | Evalve, Inc. | Systems and methods for intra-procedural cardiac pressure monitoring |
| US11272850B2 (en) * | 2016-08-09 | 2022-03-15 | Medtronic Vascular, Inc. | Catheter and method for calculating fractional flow reserve |
| US11272847B2 (en) | 2016-10-14 | 2022-03-15 | Hemocath Ltd. | System and apparatus comprising a multi-sensor catheter for right heart and pulmonary artery catheterization |
| JP7038115B2 (ja) * | 2016-10-27 | 2022-03-17 | カーディアック ペースメイカーズ, インコーポレイテッド | 圧力センサを備えた植込み型医療装置 |
| US10722125B2 (en) * | 2016-10-31 | 2020-07-28 | Livemetric (Medical) S.A. | Blood pressure signal acquisition using a pressure sensor array |
| CN106618490B (zh) * | 2016-11-11 | 2023-08-15 | 武汉理工大学 | 一种用于人体微创型压力与温度在体实时监测集成系统 |
| WO2018134330A2 (en) * | 2017-01-19 | 2018-07-26 | HighDim GmbH | Devices and methods for determining heart function of a living subject |
| JP6812815B2 (ja) * | 2017-01-31 | 2021-01-13 | 株式会社島津製作所 | X線撮影装置およびx線画像解析方法 |
| US11330994B2 (en) | 2017-03-08 | 2022-05-17 | Medtronic Vascular, Inc. | Reduced profile FFR catheter |
| US12089977B2 (en) | 2017-03-24 | 2024-09-17 | Pie Medical Imaging B.V. | Method and system for assessing vessel obstruction based on machine learning |
| EP3602394A1 (en) * | 2017-03-24 | 2020-02-05 | Pie Medical Imaging BV | Method and system for assessing vessel obstruction based on machine learning |
| US10646122B2 (en) | 2017-04-28 | 2020-05-12 | Medtronic Vascular, Inc. | FFR catheter with covered distal pressure sensor and method of manufacture |
| US11517734B2 (en) * | 2017-06-21 | 2022-12-06 | Kristin Rossodivito | System and method for detecting air embolisms in lines for hemodynamic monitoring |
| AU2018311951B2 (en) | 2017-08-03 | 2020-10-15 | Boston Scientific Scimed, Inc. | Systems for assessing fractional flow reserve |
| US11235124B2 (en) | 2017-08-09 | 2022-02-01 | Medtronic Vascular, Inc. | Collapsible catheter and method for calculating fractional flow reserve |
| US11219741B2 (en) * | 2017-08-09 | 2022-01-11 | Medtronic Vascular, Inc. | Collapsible catheter and method for calculating fractional flow reserve |
| JP7191946B2 (ja) * | 2017-10-03 | 2022-12-19 | サンフォード ヘルス | バイラテラル(両側方向)カテーテルシステム及び使用方法 |
| WO2019092490A1 (en) * | 2017-11-08 | 2019-05-16 | Murata Manufacturing Co., Ltd. | Rapid exchange catheter system for fractional flow reserve measurement |
| DE102018201314A1 (de) * | 2018-01-29 | 2019-08-01 | Siemens Healthcare Gmbh | Verfahren zur Normalisierung von Magnetresonanzbildern |
| CN112004468B (zh) | 2018-02-23 | 2023-11-14 | 波士顿科学国际有限公司 | 用连续生理测量值评估脉管的方法 |
| US11850073B2 (en) | 2018-03-23 | 2023-12-26 | Boston Scientific Scimed, Inc. | Medical device with pressure sensor |
| CN112262377A (zh) * | 2018-04-03 | 2021-01-22 | 奥普森斯公司 | 基于压力的血管评估系统和方法 |
| WO2019195721A1 (en) | 2018-04-06 | 2019-10-10 | Boston Scientific Scimed, Inc. | Medical device with pressure sensor |
| WO2019204219A1 (en) | 2018-04-18 | 2019-10-24 | Boston Scientific Scimed, Inc. | System for assessing a vessel with sequential physiological measurements |
| WO2019203895A1 (en) * | 2018-04-20 | 2019-10-24 | Acist Medical Systems, Inc. | Assessment of a vessel |
| EP3583892A1 (en) | 2018-06-20 | 2019-12-25 | Koninklijke Philips N.V. | Pressure sensing unit, system and method for remote pressure sensing |
| CN109060203A (zh) * | 2018-08-06 | 2018-12-21 | 上海大学 | 基于光纤熔锥的本征型法布里-珀罗拉力传感器件及其制造方法 |
| US11185244B2 (en) | 2018-08-13 | 2021-11-30 | Medtronic Vascular, Inc. | FFR catheter with suspended pressure sensor |
| CN109259752A (zh) * | 2018-09-25 | 2019-01-25 | 山东大学 | 基于光纤f-p腔原理的ffr传感器结构 |
| US10874850B2 (en) | 2018-09-28 | 2020-12-29 | Medtronic, Inc. | Impedance-based verification for delivery of implantable medical devices |
| JP7166125B2 (ja) * | 2018-09-28 | 2022-11-07 | フクダ電子株式会社 | 医療用電子機器 |
| CN109520654A (zh) * | 2018-10-30 | 2019-03-26 | 上海大学 | 基于光纤熔锥的本征型法布里-珀罗应力传感器及其制造方法 |
| CN113038981B (zh) | 2018-10-31 | 2023-02-28 | 阿西斯特医疗系统有限公司 | 流体压力传感器保护 |
| AU2020237188A1 (en) * | 2019-03-11 | 2021-10-28 | Athos PATSALIDES | Endovascular electroencephalography (EEG) and electrocorticography (ECoG) devices, systems and methods |
| US11331475B2 (en) | 2019-05-07 | 2022-05-17 | Medtronic, Inc. | Tether assemblies for medical device delivery systems |
| JP7368501B2 (ja) * | 2019-05-13 | 2023-10-24 | トゥエンティ・トゥエンティ・セラピューティクス・エルエルシイ | 埋め込み型眼圧センサの光学的探索のためのシステム、装置および方法 |
| USD926199S1 (en) | 2019-05-17 | 2021-07-27 | Opsens, Inc. | Display screen or portion thereof with graphical user interface |
| CN110269594A (zh) * | 2019-06-18 | 2019-09-24 | 济南市第四人民医院 | 一种冠状动脉血流储备分数测量系统 |
| US20200398025A1 (en) * | 2019-06-24 | 2020-12-24 | Orbusneich Medical Pte. Ltd. | Multi-lumen catheter |
| KR102446493B1 (ko) * | 2019-08-12 | 2022-09-26 | 한국수자원공사 | 확률분포에 기반한 가뭄 예측 방법 및 이를 위한 장치 |
| US11707563B2 (en) * | 2019-09-06 | 2023-07-25 | Adventist Health System/Sunbelt, Inc. | Advanced dialysis catheter with pressure sensor |
| EP4041071A4 (en) * | 2019-09-30 | 2023-10-18 | HemoCath Ltd. | MULTI-SENSOR CATHETER FOR PULMONARY ARTERY AND RIGHT HEART CATHETERIZATION |
| CN114762056A (zh) | 2019-12-06 | 2022-07-15 | 阿西斯特医疗系统有限公司 | 注射流体量化 |
| CN111973864B (zh) * | 2020-08-31 | 2021-07-23 | 尚华 | 一种光学功能导丝、探测系统及探测方法 |
| US20220133134A1 (en) * | 2020-11-04 | 2022-05-05 | Kotl, Llc | Imaging and pressure sensing apparatus and probes with a slidable sheath |
| US12087000B2 (en) | 2021-03-05 | 2024-09-10 | Boston Scientific Scimed, Inc. | Systems and methods for vascular image co-registration |
| CN113476694B (zh) * | 2021-07-05 | 2022-09-06 | 重庆医科大学 | 一种基于光纤法珀检测原理的可夹停的输液报警器 |
| JP2023028739A (ja) * | 2021-08-20 | 2023-03-03 | 世史明 川瀬 | 心疾患の評価支援システム及び評価支援用プログラム |
| WO2023086344A1 (en) * | 2021-11-09 | 2023-05-19 | Certus Critical Care, Inc. | Systems, devices, and methods for monitoring physiologic conditions during a medical procedure |
| CN118215523A (zh) * | 2021-11-16 | 2024-06-18 | 波士顿科学国际有限公司 | 包括近侧压力传感器的经皮循环支持装置 |
| WO2023148555A2 (en) * | 2022-02-03 | 2023-08-10 | White Swell Medical Ltd | Fluid management console and system |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1802695A3 (en) * | 1991-02-07 | 1993-03-15 | Kokapeb Ahatoлий Mиxaйлobич | Apparatus for measuring central vein pressure |
| US5782797A (en) * | 1996-06-06 | 1998-07-21 | Scimed Life Systems, Inc. | Therapeutic infusion device |
| US6166806A (en) * | 1995-09-29 | 2000-12-26 | Tjin; Swee Chuan | Fiber optic catheter for accurate flow measurements |
| US6615667B2 (en) * | 1996-01-30 | 2003-09-09 | Radi Medical Systems Ab | Combined flow, pressure and temperature sensor |
| US20040168519A1 (en) * | 2001-06-08 | 2004-09-02 | Edvard Kalvensten | Miniaturized pressure sensor |
| US20050065511A1 (en) * | 2003-09-11 | 2005-03-24 | Biotronik Gmbh & Co. Kg | Catheter |
| RU47203U1 (ru) * | 2005-04-08 | 2005-08-27 | Институт радиотехники и электроники РАН г.Москва | Волоконно-оптический термометр |
| US7134994B2 (en) * | 2002-05-20 | 2006-11-14 | Volcano Corporation | Multipurpose host system for invasive cardiovascular diagnostic measurement acquisition and display |
| US20070255145A1 (en) * | 2006-04-28 | 2007-11-01 | Radi Medical Systems Ab | Sensor and guide wire assembly |
Family Cites Families (67)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3738356A (en) * | 1971-01-22 | 1973-06-12 | Lowa State University Res Foun | Intravenous pressure monitor |
| US4006735A (en) | 1974-07-16 | 1977-02-08 | Hittman Corporation | Pressure sensor apparatus |
| DE3334152A1 (de) | 1983-09-21 | 1985-04-04 | Fischer & Porter GmbH, 3400 Göttingen | Magnetisch induktiver durchflussmesser |
| US4966148A (en) * | 1986-11-14 | 1990-10-30 | Millar Instruments, Inc. | Assembly for positioning diagnostic devices in a biological vessel |
| US5046497A (en) * | 1986-11-14 | 1991-09-10 | Millar Instruments, Inc. | Structure for coupling a guidewire and a catheter |
| US4771782A (en) * | 1986-11-14 | 1988-09-20 | Millar Instruments, Inc. | Method and assembly for introducing multiple catheters into a biological vessel |
| US4850358A (en) * | 1986-11-14 | 1989-07-25 | Millar Instruments, Inc. | Method and assembly for introducing multiple devices into a biological vessel |
| US4901731A (en) * | 1988-04-27 | 1990-02-20 | Millar Instruments, Inc. | Single sensor pressure differential device |
| US5178159A (en) * | 1988-11-02 | 1993-01-12 | Cardiometrics, Inc. | Torqueable guide wire assembly with electrical functions, male and female connectors rotatable with respect to one another |
| US4991590A (en) * | 1989-01-30 | 1991-02-12 | Martin Goffman Associates | Fiber optic intravascular blood pressure transducer |
| US4928693A (en) * | 1989-03-13 | 1990-05-29 | Schneider (Usa), Inc. | Pressure monitor catheter |
| US5395311A (en) * | 1990-05-14 | 1995-03-07 | Andrews; Winston A. | Atherectomy catheter |
| US5280786A (en) * | 1992-01-21 | 1994-01-25 | Fiberoptic Sensor Technologies, Inc. | Fiberoptic blood pressure and oxygenation sensor |
| US5228452A (en) * | 1992-02-19 | 1993-07-20 | Target Therapeutics Inc. | Proximal end fitting with an improved seal for use in a catheter guidewire assembly |
| US5597377A (en) * | 1994-05-06 | 1997-01-28 | Trustees Of Boston University | Coronary sinus reperfusion catheter |
| JP3619845B2 (ja) | 1994-09-02 | 2005-02-16 | ヴォルケーノ・セラピューテックス・インコーポレイテッド | 超小型圧力センサを用いるガイドワイヤ |
| EP0821566B1 (en) * | 1995-04-20 | 2003-10-15 | ACIST Medical Systems, Inc. | Angiographic injector |
| SE9600333D0 (sv) * | 1995-06-22 | 1996-01-30 | Radi Medical Systems | Sensor arrangement |
| US6146354A (en) * | 1996-05-24 | 2000-11-14 | Horizon Medical Products | Asymmetrical multi-lumen apheresis catheter with balanced flow rates |
| JPH10267775A (ja) | 1997-03-25 | 1998-10-09 | Tokai Rika Co Ltd | 圧力センサ |
| US6248083B1 (en) * | 1997-03-25 | 2001-06-19 | Radi Medical Systems Ab | Device for pressure measurements |
| US5938624A (en) * | 1997-09-10 | 1999-08-17 | Radi Medical Systems Ab | Male connector with a continous surface for a guide wire and method therefor |
| JPH11188010A (ja) * | 1997-10-21 | 1999-07-13 | Kawasumi Lab Inc | 圧力センサ付カテーテル |
| US6295990B1 (en) * | 1998-02-03 | 2001-10-02 | Salient Interventional Systems, Inc. | Methods and systems for treating ischemia |
| JP3116032B2 (ja) * | 1998-02-27 | 2000-12-11 | 日本ビー・エックス・アイ株式会社 | ガイドワイヤー型血流計 |
| US6089103A (en) * | 1998-05-06 | 2000-07-18 | Radi Medical Systems Ab | Method of flow measurements |
| US6245053B1 (en) * | 1998-11-09 | 2001-06-12 | Medtronic, Inc. | Soft tip guiding catheter and method of fabrication |
| US6471656B1 (en) * | 1999-06-25 | 2002-10-29 | Florence Medical Ltd | Method and system for pressure based measurements of CFR and additional clinical hemodynamic parameters |
| JP2003525067A (ja) * | 1999-03-09 | 2003-08-26 | フローレンス・メディカル・リミテッド | Cfrおよび付加的な臨床的血流力学パラメータを圧力ベースで測定するための方法およびシステム |
| JP4191849B2 (ja) * | 1999-05-28 | 2008-12-03 | 泉工医科工業株式会社 | バルーンカテーテル |
| US6383144B1 (en) * | 2000-01-18 | 2002-05-07 | Edwards Lifesciences Corporation | Devices and methods for measuring temperature of a patient |
| US6672172B2 (en) | 2000-01-31 | 2004-01-06 | Radi Medical Systems Ab | Triggered flow measurement |
| US7491176B2 (en) * | 2000-11-01 | 2009-02-17 | Vascular Biosciences | Kit for obtaining an endoarterial biopsy sample |
| WO2002047751A2 (en) | 2000-12-12 | 2002-06-20 | Datascope Investment Corp. | Intra-aortic balloon catheter having a fiberoptic sensor |
| US6616597B2 (en) * | 2000-12-12 | 2003-09-09 | Datascope Investment Corp. | Intra-aortic balloon catheter having a dual sensor pressure sensing system |
| US20020072679A1 (en) | 2000-12-12 | 2002-06-13 | Schock Robert B. | Intra-aortic balloon catheter having a fiberoptic sensor |
| US6585660B2 (en) * | 2001-05-18 | 2003-07-01 | Jomed Inc. | Signal conditioning device for interfacing intravascular sensors having varying operational characteristics to a physiology monitor |
| US7329223B1 (en) * | 2001-05-31 | 2008-02-12 | Abbott Cardiovascular Systems Inc. | Catheter with optical fiber sensor |
| US7611503B2 (en) | 2004-04-16 | 2009-11-03 | Medrad, Inc. | Fluid delivery system, fluid path set, sterile connector and improved drip chamber and pressure isolation mechanism |
| US6868736B2 (en) * | 2002-02-22 | 2005-03-22 | Sentec Corporation | Ultra-miniature optical pressure sensing system |
| US6819951B2 (en) | 2002-09-24 | 2004-11-16 | Mayo Foundation For Medical Education And Research | Peripherally inserted central catheter with continuous central venous oximetry and proximal high flow port |
| AU2003296956A1 (en) * | 2002-12-11 | 2004-06-30 | Proteus Biomedical, Inc. | Monitoring and treating hemodynamic parameters |
| JP4338446B2 (ja) * | 2003-06-05 | 2009-10-07 | 株式会社根本杏林堂 | 薬液注入装置 |
| JP4137740B2 (ja) | 2003-08-06 | 2008-08-20 | オリンパス株式会社 | カプセル型医療装置及びカプセル型医療装置誘導システム |
| JP4554967B2 (ja) * | 2004-03-25 | 2010-09-29 | テルモ株式会社 | 超音波カテーテルおよび画像診断装置 |
| JP2005291945A (ja) * | 2004-03-31 | 2005-10-20 | Masaki Esashi | センサ装置 |
| US8277386B2 (en) * | 2004-09-27 | 2012-10-02 | Volcano Corporation | Combination sensor guidewire and methods of use |
| US7402151B2 (en) | 2004-12-17 | 2008-07-22 | Biocardia, Inc. | Steerable guide catheters and methods for their use |
| US7689071B2 (en) * | 2004-12-22 | 2010-03-30 | Opsens Inc. | Fiber optic pressure sensor for catheter use |
| US7771362B2 (en) | 2005-08-01 | 2010-08-10 | Datascope Investment Corp. | Calibration of in vivo blood pressure sensors |
| US7775988B2 (en) | 2005-09-30 | 2010-08-17 | Radi Medical Systems Ab | Method for determining the blood flow in a coronary artery |
| EP1942793A2 (en) * | 2005-09-30 | 2008-07-16 | Cornova, Inc. | Systems and methods for analysis and treatment of a body lumen |
| US7724148B2 (en) * | 2006-11-20 | 2010-05-25 | Radi Medical Systems Ab | Transceiver unit in a pressure measurement system |
| ES2913941T3 (es) | 2008-09-11 | 2022-06-06 | Acist Medical Sys Inc | Dispositivo de implantación de sensores fisiológicos y sistema de inyección de fluido |
| WO2010105356A1 (en) * | 2009-03-17 | 2010-09-23 | Opsens Inc . | Eccentric pressure catheter with guidewire compatibility |
| JP5922111B2 (ja) | 2010-06-23 | 2016-05-24 | ピーツー−サイエンス・エペイエス | 充血剤注入と同時に血圧測定を行う診断目的の動脈用複合カテーテル |
| EP2706908B1 (en) | 2011-05-11 | 2019-07-10 | Acist Medical Systems, Inc. | Intravascular sensing system |
| US9339348B2 (en) | 2011-08-20 | 2016-05-17 | Imperial Colege of Science, Technology and Medicine | Devices, systems, and methods for assessing a vessel |
| US10736519B2 (en) | 2012-01-19 | 2020-08-11 | Philips Image Guided Therapy Corporation | Interface devices, systems, and methods for use with intravascular pressure monitoring devices |
| US10506934B2 (en) | 2012-05-25 | 2019-12-17 | Phyzhon Health Inc. | Optical fiber pressure sensor |
| US9241641B2 (en) | 2012-07-20 | 2016-01-26 | Acist Medical Systems, Inc. | Fiber optic sensor assembly for sensor delivery device |
| JP6419425B2 (ja) | 2012-11-29 | 2018-11-07 | キヤノンメディカルシステムズ株式会社 | 血流機能検査装置、及び、x線診断装置 |
| CN203458373U (zh) | 2013-09-10 | 2014-03-05 | 南方医科大学 | 一种冠状动脉血流储备分数实时测量系统 |
| US9877660B2 (en) | 2013-11-14 | 2018-01-30 | Medtronic Vascular Galway | Systems and methods for determining fractional flow reserve without adenosine or other pharmalogical agent |
| CN107920764B (zh) | 2015-07-17 | 2021-09-21 | 皇家飞利浦有限公司 | 用于评估脉管的设备、系统和方法 |
| US11246661B2 (en) | 2015-09-29 | 2022-02-15 | Imperial Innovations Limited | Devices systems and methods for coronary intervention assessment, planning, and treatment based on desired outcome |
| CN105326486B (zh) | 2015-12-08 | 2017-08-25 | 博动医学影像科技(上海)有限公司 | 血管压力差与血流储备分数的计算方法及系统 |
-
2009
- 2009-09-11 ES ES09813672T patent/ES2913941T3/es active Active
- 2009-09-11 PL PL09813672.4T patent/PL2334227T3/pl unknown
- 2009-09-11 KR KR1020117008315A patent/KR101754570B1/ko active IP Right Grant
- 2009-09-11 KR KR1020177017924A patent/KR20170081278A/ko not_active Application Discontinuation
- 2009-09-11 US US12/557,685 patent/US8298156B2/en active Active
- 2009-09-11 EP EP09813672.4A patent/EP2334227B1/en active Active
- 2009-09-11 BR BRPI0918563A patent/BRPI0918563B8/pt active IP Right Grant
- 2009-09-11 AU AU2009291623A patent/AU2009291623B2/en active Active
- 2009-09-11 RU RU2011113976/14A patent/RU2478338C2/ru not_active IP Right Cessation
- 2009-09-11 JP JP2011526994A patent/JP5746969B2/ja active Active
- 2009-09-11 CA CA2734698A patent/CA2734698C/en active Active
- 2009-09-11 CN CN200980143511.6A patent/CN102202562B/zh active Active
- 2009-09-11 CA CA2803747A patent/CA2803747C/en active Active
- 2009-09-11 WO PCT/US2009/056664 patent/WO2010030882A1/en active Application Filing
- 2009-09-11 CA CA2939764A patent/CA2939764C/en active Active
- 2009-09-11 CA CA2762123A patent/CA2762123C/en active Active
-
2011
- 2011-03-10 IL IL211659A patent/IL211659A/en active IP Right Grant
-
2012
- 2012-01-13 US US13/350,158 patent/US8485985B2/en active Active
- 2012-03-13 US US13/418,491 patent/US9011342B2/en active Active
-
2013
- 2013-04-15 IL IL225761A patent/IL225761A/en active IP Right Grant
- 2013-06-13 US US13/917,354 patent/US8641639B2/en active Active
- 2013-08-08 US US13/962,410 patent/US9186072B2/en active Active
-
2014
- 2014-03-14 US US14/213,387 patent/US8998823B2/en active Active
-
2015
- 2015-03-09 US US14/642,439 patent/US9113843B2/en active Active
- 2015-05-11 JP JP2015096712A patent/JP2015180262A/ja active Pending
- 2015-05-21 AU AU2015202756A patent/AU2015202756B2/en active Active
- 2015-08-24 US US14/833,912 patent/US10010251B2/en active Active
-
2016
- 2016-11-07 AU AU2016256664A patent/AU2016256664B2/en active Active
-
2017
- 2017-04-28 US US15/582,327 patent/US9901260B2/en active Active
- 2017-12-06 US US15/832,988 patent/US10105064B2/en active Active
-
2018
- 2018-10-22 US US16/166,472 patent/US10980426B2/en active Active
-
2021
- 2021-04-19 US US17/233,820 patent/US20210236002A1/en active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU1802695A3 (en) * | 1991-02-07 | 1993-03-15 | Kokapeb Ahatoлий Mиxaйлobич | Apparatus for measuring central vein pressure |
| US6166806A (en) * | 1995-09-29 | 2000-12-26 | Tjin; Swee Chuan | Fiber optic catheter for accurate flow measurements |
| US6615667B2 (en) * | 1996-01-30 | 2003-09-09 | Radi Medical Systems Ab | Combined flow, pressure and temperature sensor |
| US5782797A (en) * | 1996-06-06 | 1998-07-21 | Scimed Life Systems, Inc. | Therapeutic infusion device |
| US20040168519A1 (en) * | 2001-06-08 | 2004-09-02 | Edvard Kalvensten | Miniaturized pressure sensor |
| US7134994B2 (en) * | 2002-05-20 | 2006-11-14 | Volcano Corporation | Multipurpose host system for invasive cardiovascular diagnostic measurement acquisition and display |
| US20050065511A1 (en) * | 2003-09-11 | 2005-03-24 | Biotronik Gmbh & Co. Kg | Catheter |
| RU47203U1 (ru) * | 2005-04-08 | 2005-08-27 | Институт радиотехники и электроники РАН г.Москва | Волоконно-оптический термометр |
| US20070255145A1 (en) * | 2006-04-28 | 2007-11-01 | Radi Medical Systems Ab | Sensor and guide wire assembly |
Non-Patent Citations (1)
| Title |
|---|
| SAUSR F.E. et al. Pressure microsensing catheters for neonatal care. Proceedings of IEEE Sensors, 3, art. no. W3L-A.1, 2004, p.1476-1479 (реферат на сайте http://www.scopus.com). TABBARA M. et al. Potential of intraluminal ultrasound for angioplasty guidance. Proceedings of SPIE - The International Society for Optical Engineering, 1201, 1990, p.523-526 (реферат на сайте http://www.scopus.com). * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2689023C2 (ru) * | 2013-09-30 | 2019-05-23 | Конинклейке Филипс Н.В. | Многоцелевая конструкция просвета для оптического восприятия геометрической формы |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2478338C2 (ru) | Устройство и способ доставки физиологического датчика | |
| CN107072557B (zh) | 生理学传感器递送装置及方法 | |
| US20150141853A1 (en) | Multi-sensor lesion assessment device and method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20190912 |