RU2421632C2 - Способ работы насосной системы - Google Patents
Способ работы насосной системы Download PDFInfo
- Publication number
- RU2421632C2 RU2421632C2 RU2007132873A RU2007132873A RU2421632C2 RU 2421632 C2 RU2421632 C2 RU 2421632C2 RU 2007132873 A RU2007132873 A RU 2007132873A RU 2007132873 A RU2007132873 A RU 2007132873A RU 2421632 C2 RU2421632 C2 RU 2421632C2
- Authority
- RU
- Russia
- Prior art keywords
- electric drive
- pressure
- controller
- maximum
- value
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 31
- 230000007246 mechanism Effects 0.000 claims abstract description 62
- 238000005086 pumping Methods 0.000 claims description 66
- 230000001105 regulatory effect Effects 0.000 claims 6
- 230000001276 controlling effect Effects 0.000 claims 2
- 239000000126 substance Substances 0.000 abstract 1
- 230000007423 decrease Effects 0.000 description 12
- 238000013021 overheating Methods 0.000 description 9
- 230000008859 change Effects 0.000 description 8
- 230000006835 compression Effects 0.000 description 8
- 238000007906 compression Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 239000000758 substrate Substances 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000006698 induction Effects 0.000 description 2
- 238000005461 lubrication Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000020169 heat generation Effects 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000010310 metallurgical process Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C14/00—Control of, monitoring of, or safety arrangements for, machines, pumps or pumping installations
- F04C14/08—Control of, monitoring of, or safety arrangements for, machines, pumps or pumping installations characterised by varying the rotational speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/06—Control using electricity
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B49/00—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00
- F04B49/20—Control, e.g. of pump delivery, or pump pressure of, or safety measures for, machines, pumps, or pumping installations, not otherwise provided for, or of interest apart from, groups F04B1/00 - F04B47/00 by changing the driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C23/00—Combinations of two or more pumps, each being of rotary-piston or oscillating-piston type, specially adapted for elastic fluids; Pumping installations specially adapted for elastic fluids; Multi-stage pumps specially adapted for elastic fluids
- F04C23/02—Pumps characterised by combination with, or adaptation to, specific driving engines or motors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C25/00—Adaptations of pumps for special use of pumps for elastic fluids
- F04C25/02—Adaptations of pumps for special use of pumps for elastic fluids for producing high vacuum
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C28/00—Control of, monitoring of, or safety arrangements for, pumps or pumping installations specially adapted for elastic fluids
- F04C28/06—Control of, monitoring of, or safety arrangements for, pumps or pumping installations specially adapted for elastic fluids specially adapted for stopping, starting, idling or no-load operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04D—NON-POSITIVE-DISPLACEMENT PUMPS
- F04D27/00—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids
- F04D27/004—Control, e.g. regulation, of pumps, pumping installations or pumping systems specially adapted for elastic fluids by varying driving speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/02—Motor parameters of rotating electric motors
- F04B2203/0201—Current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B2203/00—Motor parameters
- F04B2203/02—Motor parameters of rotating electric motors
- F04B2203/0204—Frequency of the electric current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C18/00—Rotary-piston pumps specially adapted for elastic fluids
- F04C18/08—Rotary-piston pumps specially adapted for elastic fluids of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing
- F04C18/12—Rotary-piston pumps specially adapted for elastic fluids of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of other than internal-axis type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C18/00—Rotary-piston pumps specially adapted for elastic fluids
- F04C18/08—Rotary-piston pumps specially adapted for elastic fluids of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing
- F04C18/12—Rotary-piston pumps specially adapted for elastic fluids of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of other than internal-axis type
- F04C18/14—Rotary-piston pumps specially adapted for elastic fluids of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of other than internal-axis type with toothed rotary pistons
- F04C18/16—Rotary-piston pumps specially adapted for elastic fluids of intermeshing-engagement type, i.e. with engagement of co-operating members similar to that of toothed gearing of other than internal-axis type with toothed rotary pistons with helical teeth, e.g. chevron-shaped, screw type
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2220/00—Application
- F04C2220/10—Vacuum
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2220/00—Application
- F04C2220/10—Vacuum
- F04C2220/12—Dry running
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2240/00—Components
- F04C2240/40—Electric motor
- F04C2240/403—Electric motor with inverter for speed control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/08—Amplitude of electric current
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/09—Electric current frequency
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/18—Pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04C—ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; ROTARY-PISTON, OR OSCILLATING-PISTON, POSITIVE-DISPLACEMENT PUMPS
- F04C2270/00—Control; Monitoring or safety arrangements
- F04C2270/19—Temperature
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02B—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO BUILDINGS, e.g. HOUSING, HOUSE APPLIANCES OR RELATED END-USER APPLICATIONS
- Y02B30/00—Energy efficient heating, ventilation or air conditioning [HVAC]
- Y02B30/70—Efficient control or regulation technologies, e.g. for control of refrigerant flow, motor or heating
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Control Of Positive-Displacement Pumps (AREA)
- Applications Or Details Of Rotary Compressors (AREA)
- Compressors, Vaccum Pumps And Other Relevant Systems (AREA)
- Non-Positive Displacement Air Blowers (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
Изобретение относится к насосным системам. Насосная система для вакуумирования камеры содержит насосный механизм (30), электропривод (32) для запуска насосного механизма и контроллер (36) для управления электроприводом. Контроллер устанавливает максимальное значение частоты вращения электропривода и максимальное значение тока электропривода, при этом для оптимизации режима работы насосной системы независимо регулируют максимальные значения во время вакуумирования камеры. 2 н. и 44 з.п.ф-лы, 6 ил.
Description
Область техники
Настоящее изобретение относится к способу работы насосной системы.
Предшествующий уровень техники
Вакуумная технология широко применяется при изготовлении полупроводниковых устройств и дисплеев с плоским экраном для нанесения тонких пленок на подложки и в металлургических процессах. Насосные системы, используемые для вакуумирования сравнительно больших технологических камер, например загрузочных шлюзовых камер, до желаемого давления, обычно содержат, по меньшей мере, один бустерный насос, последовательно соединенный с, по меньшей мере, одним форвакуумным насосом.
Бустерные насосы обычно имеют безмасляный насосный механизм, так как любые смазочные материалы, присутствующие в насосном механизме, могут вызвать загрязнение чистой среды, в которой осуществляется обработка в вакууме. Такие «сухие» вакуумные насосы обычно представляют собой одно- или многоступенчатые нагнетательные объемные насосы, в насосном механизме которых применены взаимозацепляющие роторы. Роторы могут иметь один и тот же тип профиля в каждой ступени, или профиль может меняться от ступени к ступени. Форвакуумные насосы могут иметь механизм, сходный с механизмом в бустерных насосах, или другой насосный механизм.
Насосный механизм бустерного насоса обычно имеет привод от асинхронного электродвигателя переменного тока. Эти электродвигатели должны иметь такую номинальную мощность, чтобы насос был способен обеспечить соответствующее сжатие откачиваемого газа между входом и выходом насоса, и чтобы получаемая скорость откачки была достаточной для необходимой производительности.
Часть мощности, подводимой к приводу бустерного насоса, расходуется на образование теплоты сжатия в откачиваемом газе, особенно при промежуточном и высоком уровнях давления на входе, так что корпус насоса и роторы могут нагреваться. Если не регулировать надлежащим образом степень сжатия и создаваемый перепад давления, то возможен риск перегрева бустерного насоса, приводящий в конце концов к повреждению системы смазки, чрезмерному термическому расширению и заеданию. Таким образом, стандартный электродвигатель для бустерного насоса данного размера и с данной скоростью откачки выбирают так, чтобы он при нормальной эксплуатации был способен обеспечить соответствующее сжатие при низких давлениях на входе, однако, при этом остается риск перегрева, если насос работает при промежуточном и высоком уровнях давления на входе без средства защиты.
В указанной обычной насосной системе может потребоваться частая и неоднократная работа при изменении давления на входе от высокого до промежуточного давления. Например, загрузочную шлюзовую камеру неоднократно вакуумируют от атмосферного давления до низкого давления, чтобы обеспечить передачу подложки, расположенной в этой камере, в технологическую камеру, и затем переводят к атмосферному давлению, чтобы обеспечить удаление обработанной подложки и ее замену новой подложкой. Степень сжатия газа бустерным насосом и перепад давления между его входом и выходом можно ограничивать различными средствами, чтобы регулировать образование тепла и ограничивать риск перегрева. Если слишком сильно ограничивать сжатие газа бустерным насосом, то получающееся в результате время вакуумирования большой вакуумной камеры может быть нежелательно длительным. Если недостаточно ограничивать сжатие газа бустерым насосом, то, хотя время вакуумирования вакуумной камеры может быть коротким, механический бустерный насос может перегреться.
Для активирования электродвигателя бустерного насоса может быть применен блок частотно-регулируемого электропривода между электродвигателем и источником питания для электродвигателя. Такие приводные блоки работают путем преобразования мощности переменного тока, подводимой от источника питания, в мощность постоянного тока, а затем преобразуют мощность постоянного тока в мощность переменного тока требуемой амплитуды и частоты. Мощность, подводимую к электродвигателю, регулируют путем регулирования тока, подводимого к электродвигателю, который, в свою очередь, регулируют путем регулирования частоты и/или амплитуды напряжения в электродвигателе. Ток, подводимый к электродвигателю, определяет величину крутящего момента, создаваемого в электродвигателе, и, таким образом, определяет крутящий момент для вращения насосного механизма. Частота мощности определяет частоту вращения насосного механизма. Изменяя частоту мощности, можно бустерным насосом поддерживать постоянное давление в системе даже при условиях, когда нагрузка по газу может значительно изменяться.
Чтобы предотвратить перегрузку бустерного насоса, блок привода устанавливает максимальное значение для частоты мощности (fмакс) и максимальное значение для тока, подводимого к электродвигателю (Iмакс). Этот предел тока обычно будет соответствовать максимально допустимой непрерывной нагрузке электродвигателя и будет ограничивать эффективный крутящий момент, создаваемый насосным механизмом, и, следовательно, величину получающегося в результате перепада давления, тем самым ограничивая количество тепла, образующегося в откачиваемом газе.
В начале цикла быстрой откачки желательно как можно быстрее вращать насосный механизм, чтобы максимально увеличить скорость откачки. Вследствие высокого давления и, таким образом, сравнительно высокой плотности газа в начале этого цикла требуется большой крутящий момент для вращения насосного механизма при частоте около fмакс и, таким образом, существует высокое потребление тока, которое обычно больше, чем Iмакс. Чтобы защитить электродвигатель от повреждения, частоту мощности, подводимой к электродвигателю бустерного насоса, быстро понижают до некоторого уровня ниже fмакс, что приводит к резкому понижению частоты вращения насоса и тем самым к ограничению создаваемого перепада давления. По мере того как будет продвигаться вперед откачка и уменьшаться давление на входе, блок привода будет в течение ограниченного периода времени линейно повышать частоту по направлению к fмакс, чтобы постепенно увеличить частоту вращения бустерного насоса. Хотя это защищает бустерный насос от перегрева при всех давлениях на входе, этот период времени, когда понижается частота вращения, может означать нежелательное удлинение времени, требующегося для вакуумирования камеры от атмосферного давления до желаемого низкого давления (времени «скачивания»).
Краткое изложение существа изобретения
Задачей настоящего изобретения является устранение указанных недостатков.
Согласно первому аспекту настоящего изобретения поставленная задача решена путем создания насосной системы, содержащей насосный механизм, электропривод для запуска насосного механизма и контроллер для управления электроприводом, при этом контроллер устанавливает максимальное значение для частоты вращения электродвигателя (fмакс) и максимальное значение для тока в электродвигателе (Iмакс), а для оптимизации режима работы насосной системы регулирует указанные максимальные значения во время работы насосной системы.
Система предпочтительно содержит инвертер для подвода частотно-регулируемой мощности к электродвигателю и регулятор для регулирования амплитуды и частоты мощности во время работы насосной системы.
Контроллер предпочтительно выполнен с возможностью принимать входной сигнал от, по меньшей мере, одного датчика для контроля одного или нескольких состояний в системе и для регулирования, по меньшей мере, одного из максимальных значений в зависимости от контролируемых состояний. Например, по меньшей мере, один датчик может быть выполнен с возможностью подавать сигнал, показывающий давление газа в насосной системе, при этом контроллер регулирует, по меньшей мере, одно из максимальных значений в зависимости от принятого сигнала (сигналов). В другом примере, по меньшей мере, один датчик выполнен с возможностью подавать сигнал, показывающий температуру насосной системы, при этом контроллер регулирует, по меньшей мере, одно из максимальных значений в зависимости от принятого сигнала (сигналов). В еще одном примере не используют никаких внешних датчиков, а вместо этого контроллер регулирует, по меньшей мере, одно из максимальных значений в зависимости только от времени и в соответствии с установленной конфигурацией и параметрами.
В предпочтительном варианте осуществления изобретения оба максимальные значения изменяются по мере того, как уменьшается давление газа во время вакуумирования камеры от атмосферного давления. Контроллер выполнен с возможностью увеличивать максимальное значение тока в электродвигателе (Iмакс) во время работы насосной системы при относительно высоком давлении и увеличивать максимальное значение частоты вращения электродвигателя (fмакс) во время работы насосной системы при относительно низком давлении.
В первой области относительно высокого давления, т.е. когда давление на входе насосного механизма уменьшается от атмосферного давления, Iмакс может быть увеличен до такого значения, что во время использования в этой области высокого давления Iмакс больше, чем номинальная характеристика электродвигателя, и достаточен для того, чтобы обеспечить создание увеличенного перепада давления, так что давление на входе бустерного насоса, с выхода которого газ выпускается непосредственно в атмосферу, достигает более низкого уровня, чем это в противном случае было бы возможно с номинальным Iмакс.
Если работать при полном цикле откачки с этим повышенным значением Iмакс, то существует риск того, что электродвигатель может перегреться. Поэтому после того, как давление упадет ниже первого, предварительно установленного значения, например, до значения в пределах 100 мбар-500 бар, уменьшают значение Iмакс для обеспечения оптимального режима откачки, при этом поддерживая образованный перепад давления в безопасных приделах для предотвращения перегрева насосного механизма.
Когда давление газа достигнет второго предварительно установленного значения, более низкого, чем первое предварительно установленное значение, например, в пределах 1 мбар-100 мбар, предпочтительнее в пределах 10 мбар-100 мбар, плотность газа, откачиваемого из камеры, будет недостаточной для того, чтобы вызвать риск перегрева насосного механизма, и, таким образом, fмакс может быть увеличена для улучшения режима работы насоса.
В качестве альтернативы изменению максимальных значений в зависимости от давления газа, поступающего к насосному механизму, по меньшей мере, одно из максимальных значений можно регулировать в зависимости от давления газа, выходящего из насосного механизма. В качестве других альтернативных вариантов эти значения можно регулировать в зависимости от температуры корпуса насосного механизма и/или температуры газа, поступающего в насосный механизм, у входного отверстия этого механизма, и/или температуры газа, выходящего из насосного механизма, у выходного отверстия этого механизма.
Насосным механизмом предпочтительно является насосный механизм бустерного насоса для откачки газа из камеры. Кроме того, насосная система может содержать основной или форвакуумный насос, вход которого соединен с выходом бустерного насоса. Если возможен свободный выпуск откачиваемого газа непосредственно в атмосферу с использованием отдельной выпускной линии, которая не проходит через форвакуумный насос, и не имеется никакого ограничения в отношении частоты вращения бустерного насоса, то он один лишь может при высоких давлениях на входе обеспечить эффективную скорость откачки от атмосферного давления до давления на входе, которая выше той, что была бы достижима при соединении через форвакуумный насос, и которая определяется имеющейся мощностью электродвигателя. Это может способствовать достижению более быстрого вакуумирования камеры, чем это происходило бы в противном случае. Если эта выпускная линия будет оканчиваться редукционным клапаном, то он будет открываться в атмосферу и свободно выпускать газ всякий раз, когда давление газа, выпускаемого из бустерного насоса, будет выше атмосферного давления, что позволит бустерному насосу работать при максимальной номинальной скорости. Следовательно, система предпочтительно содержит редукционный клапан, гидравлически сообщающийся с выпускной трубой от насосного механизма в бустерном насосе для избирательного выпуска в атмосферу газа, сжатого насосным механизмом в бустерном насосе. Редукционный клапан предпочтительно выполнен с возможностью автоматически закрываться, когда давление газа, выпускаемого из бустерного насоса, падает ниже атмосферного давления, и в этот момент вступает в действие форвакуумный насос, чтобы еще более понизить давление на выходе бустерного насоса и увеличить эффективную скорость откачки.
Закрывание редукционного клапана может служить удобным указанием о давлении в насосной системе, и, таким образом, по меньшей мере, один датчик может быть выполнен с возможностью обнаруживать положение редукционного клапана, а контроллер может быть выполнен с возможностью уменьшать максимальное значение тока в электродвигателе, когда редукционный клапан переключается от открытого положения к закрытому положению.
Согласно второму аспекту настоящего изобретения предложен способ работы насосной системы, содержащей насосный механизм и электропривод для запуска насосного механизма, при этом способ заключается в том, что устанавливают максимальное значение частоты вращения электропривода и максимальное значение тока в электроприводе и регулируют во время работы насосной системы указанные максимальные значения для оптимизации режима работы насосной системы.
Вышеописанные отличительные признаки изобретения для системы в равной степени относятся к способу и наоборот.
Краткое описание чертежей
Ниже описаны предпочтительные отличительные признаки настоящего изобретения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает блок-схему насосной системы для вакуумирования камеры, согласно изобретению;
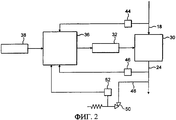
фиг.2 - первый вариант выполнения системы привода для запуска электропривода бустерного насоса насосной системы, согласно изобретению;
фиг.3 - блок-схему частотно-регулируемого привода системы привода на фиг.2, согласно изобретению;
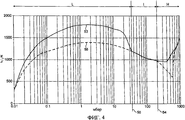
фиг.4 - диаграмму изменения эффективной скорости откачки или скорости вакуумирования камеры в зависимости от давления на входе во время работы насосной системы, согласно изобретению;
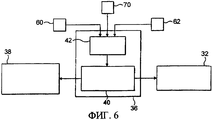
фиг.5 - блок-схему второго варианта выполнения системы привода для запуска электропривода бустерного насоса насосной системы, согласно изобретению;
фиг.6 - блок-схему частотно-регулируемого привода системы привода, согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
На фиг.1 показана блок-схема вакуумной насосной системы для вакуумирования камеры 10, например, загрузочной шлюзовой камеры или другой сравнительно большой камеры. Система содержит бустерный насос 12, последовательно соединенный с форвакуумным насосом 14. Бустерный насос 12 имеет вход 16, соединенный каналом 18 откачки предпочтительно в виде трубопровода 18 с выходом 20 камеры 10. Выход 22 бустерного насоса 12 соединен трубопроводом 24 с входом 26 форвакуумного насоса 14. Форвакуумный насос 14 имеет выход 28, через который выпускается в атмосферу газ, откаченный из камеры 10.
Хотя показанная насосная система содержит один бустерный насос и один форвакуумный насос, может быть использовано любое количество бустерных насосов в зависимости от требований к откачке из камеры. В тех случаях, когда применяется множество бустерных насосов, их соединяют параллельно, так чтобы каждый бустерный насос мог находиться при одинаковых условиях эксплуатации. При использовании сравнительно большого количества бустерных насосов два или большее число форвакуумных насосов могут подключаться параллельно. Кроме того, при необходимости между первым рядом бустерных насосов и форвакуумными насосами может помещен дополнительный ряд или ряды бустерных насосов, также соединенных параллельно.
Кроме того, бустерный насос 12 (фиг.2) содержит насосный механизм 30, запускаемый электроприводом 32 с регулированием частоты вращения. Бустерные насосы обычно содержат по существу сухой (или безмасляный) насосный механизм 30, однако, они обычно также содержат некоторые детали, как, например, подшипники и шестерни передачи в приводе насосного механизма 30, которые нуждаются в смазке для работы. К сухим насосам относятся насос Рутса, насос Нортхея (или «кулачковый» насос) и винтовой насос. Сухие насосы, содержащие механизмы Рутса и/или Нортхея, обычно представляют собой многоступенчатые нагнетательные объемные насосы, в которых в каждой насосной камере размещены взаимозацепляющие роторы. Роторы установлены на противоположно вращающихся валах и могут иметь один и тот же тип профиля в каждой насосной камере, или профиль может меняться от камеры к камере.
Форвакуумный насос 14 может иметь насосный механизм, сходный с насосным механизмом бустерного насоса 12, или другой насосный механизм. Например, форвакуумным насосом 14 может быть центробежный лопастной насос, ротационный поршневой насос, насос Нортхея или «кулачковый» насос либо винтовой насос. Электропривод 34 форвакуумного насоса запускает насосный механизм 30 форвакуумного насоса 14.
Электроприводом 32 бустерного насоса 12 может быть любой подходящий электропривод для запуска насосного механизма 30 бустерного насоса 12. В предпочтительном варианте осуществления изобретения электропривод 32 представляет собой асинхронный электродвигатель переменного тока. Система управления для запуска электропривода 32 содержит блок 36 частотно-регулируемого привода для приема мощности переменного тока, подводимой источником питания 38, и преобразования принятой мощности переменного тока в электропитание электропривода 32.
На фиг.3 подробнее показана блок-схема блока 36 привода. Блок 36 привода содержит инвертер 40 и контроллер 42 инвертера. Как известно, инвертер 40 содержит схему выпрямителя для преобразования мощности переменного тока от источника питания 38 в пульсирующую мощность постоянного тока, промежуточную цепь постоянного тока для фильтрации пульсирующей мощности постоянного тока в мощность постоянного тока и цепь инвертера для преобразования мощности постоянного тока в мощность переменного тока для запуска электропривода 32.
Контроллер 42 инвертера управляет инвертером 40 так, чтобы мощность имела желаемые амплитуду и частоту. Контроллер 42 инвертера регулирует амплитуду и частоту мощности в зависимости от рабочего состояния насосной системы. В примере, показанном на фиг.2 и 3, контроллер 42 инвертера регулирует мощность в зависимости от давления газа в насосной системе. Как показано, контроллер 42 инвертера принимает первый сигнал, показывающий давление на входе 16 бустерного насоса 12, от первого датчика давления 44 для определения давления в трубопроводе 18. Альтернативно или в дополнение к этому контроллер 42 инвертера может принимать второй сигнал, показывающий давление на выходе 22 бустерного насоса 12, от второго датчика давления 46 для определения давления в трубопроводе 24. Затем контроллер 42 инвертера изменяет мощность в зависимости от одного или двух из первого и второго сигналов. При изменении частоты мощности на выходе инвертера 40 изменяется частота вращения электропривода 32 в соответствии с изменением частоты. Таким образом, блок 36 привода способен изменять частоту вращения бустерного насоса 12 во время вакуумирования камеры 10 для того, чтобы оптимизировать режим работы бустерного насоса 12.
Контроллер 42 инвертера устанавливает значения для двух или большего числа рабочих пределов блока 36 привода, в частности, для максимальной частоты мощности, подводимой к электроприводу 32 (fмакс), и максимального тока, который может быть подведен к электроприводу 32 (Iмакс). Как упоминалось выше, значение Iмакс обычно устанавливают таким, чтобы оно соответствовало максимально допустимой непрерывной нагрузке электропривода 32, то есть мощности, при которой электропривод может работать неограниченно долго без достижения состояния перегрузки. Установление максимума на мощность, подводимую к электроприводу, имеет результатом ограничение эффективного крутящего момента, имеющегося для насосного механизма 30. Это, в свою очередь, ограничивает получающийся перепад давления через бустерный насос 12 и, таким образом, количество тепла, образующегося в бустерном насосе 12.
Контроллер 42 инвертора, кроме того, регулирует ток, подводимый к электроприводу 32. Ток, подводимый к электроприводу 32, зависит от значений частоты и амплитуды мощности переменного тока, подводимой к электроприводу 32 блоком 36 привода. В случае, если ток, подводимый к электроприводу 32, превышает Iмакс, контроллер 32 инвертора управляет инвертором 40 так, чтобы быстро уменьшить частоту и амплитуду мощности, подводимой к электроприводу 32, и, тем самым, понизить как ток ниже Iмакс, так и частоту вращения бустерного насоса 12.
Возвращаемся к фиг.1, на которой отводной трубопровод 48 соединен с трубопроводом 24, проходящим между выходом 22 бустерного насоса 12 и входом 26 форвакуумного насоса 14. Отводной трубопровод 48 оканчивается в редукционном клапане 50. Когда давление в этом трубопроводе достигает заданного давления, которое в этом примере составляет около атмосферного давления или несколько выше его, редукционный клапан 50 открывается для выпуска в атмосферу сжатого газа внутри трубопровода 24. Как показано на фиг.2 и 3, может быть предусмотрен датчик 52 для подачи сигнала, показывающего положение редукционного клапана 50, и этот сигнал подается также к контроллеру 42 инвертора. Таким образом, контроллер 42 инвертора может принимать сигналы от датчиков 44, 46, показывающих давление на соответственно входе 16 и выходе 22 бустерного насоса 12, и сигнал от датчика 52, показывающего положение редукционного клапана 50.
Ниже описан способ работы насосной системы (фиг.1 и 3), предназначенной для вакуумирования камеры 10 от атмосферного давления до желаемого давления.
При высоких давлениях на входе во время начальной стадии вакуумирования камеры 10 давления газа, выходящего из бустерного насоса 12, будет вследствие сжатия газа насосным механизмом 30 бустерного насоса 12 выше атмосферного давления, и, таким образом, редукционный клапан 50 будет открываться, чтобы позволить газу, выпускаемому из бустерного насоса 12, выходить в атмосферу, что улучшает эффективную скорость откачки насосной системой.
Как упоминалось выше, контроллер 42 инвертора предварительно устанавливает значения для Iмакс и fмакс, которые соответствуют максимально допустимой непрерывной нагрузке электропривода, то есть мощности, при которой электропривод может работать неограниченно долго без достижения состояния перегрузки. Во время начальной стадии работы насосной системы вследствие относительно высокого давления газа, проходящего через бустерный насос 12, требуется большой ток для создания электроприводом 32 крутящего момента, достаточного для вращения насосного механизма 30 при частоте, приближающейся к fмакс, и для образования значительного перепада давления через механизм, чтобы откачивать до удовлетворительного промежуточного давления. Оптимальный ток для этого, в общем, может быть больше, чем обычное значение Iмакс. Чтобы максимально увеличить производительность бустерного насоса 12 во время этой начальной стадии вакуумирования камеры 10, значение Iмакс временно увеличивают до значения, которое позволяет использовать полную производительность бустерного насоса 12, то есть до значения выше, чем номинальная нагрузка электропривода. Таким образом, бустерный насос временно «перегружают» для того, чтобы продлить увеличенную скорость вакуумирования камеры во время начальной стадии вакуумирования камеры 10 при высоком давлении на входе, обозначенной «Н» (фиг.4), где кривая 53 показывает изменение эффективной скорости откачки или скорости вакуумирования камеры 10 в зависимости от давления на входе во время работы насосной системы по сравнению со сходным изменением, показанным кривой 55, для насосной системы, где fмакс и Iмакс не изменяются во время работы. С другой стороны, может быть использован электропривод, который значительно больше, чем тот, которым обычно снабжают бустерный насос и который имеет большой номинальный ток, так что временно увеличенное значение Iмакс фактически не означает никакого состояния перегрузки электропривода.
Чтобы предотвратить перегрев бустерного насоса 12 вследствие длительной работы при повышенном значении Iмакс, значение Iмакс впоследствии возвращают к предварительно установленному значению:
- после истечения первого, предварительно установленного периода времени; и
- когда давление газа в насосной системе достигло первого, предварительно установленного значения.
Это первое, предварительно установленное значение может быть обнаружено по сигналу, принятому от любого из датчиков 44, 46, 52. Например, как показано поз.54 (фиг.4), перегрузка бустерного насоса 12 может быть завершена, когда давление газа на входе 16 бустерного насоса 12, как показывает выходной сигнал от датчика 44, падает ниже первого, предварительно установленного значения, которое в показанном примере составляет около 200 мбар. В качестве альтернативы перегрузка бустерного насоса 12 может быть завершена, когда давление газа на выходе 22 бустерного насоса 12, как это показывает выходной сигнал от датчика 46, падает ниже первого предварительно установленного значения, которое в описываемом примере приблизительно равно атмосферному давлению. Оно может быть обнаружено по закрыванию редукционного клапана 50, когда датчик 52 подает сигнал на вход контроллера 42 инвертора. Следовательно, в качестве запускающего сигнала для уменьшения значения I макс может быть использован любой из выходных сигналов от трех датчиков 44, 46, 52. Следствием уменьшения Iмакс в этот момент обычно будет уменьшение частоты вращения электропривода бустерного насоса.
Уменьшение значения Iмакс до предварительно установленного значения во время второй стадии вакуумирования камеры 10 при промежуточном давлении «I» (фиг.4) позволяет оптимизировать режим работы бустерного насоса во время этой стадии при промежуточном давлении, при этом поддерживая перепад давления, созданный бустерным насосом 12, в пределах, в которых предотвращается перегрев бустерного насоса 12. Когда при закрывании редукционного клапана 50 форвакуумный насос 14 оказывается гидравлически сообщенным с бустерным насосом 12, вступает в действие форвакуумный насос 14 для увеличения эффективной скорости откачки насосной системой, которая постоянно увеличивается по мере того, как продолжает падать давление на входе 16 бустерного насоса 12.
По мере того, как продолжается вакуумирование и уменьшается давление на входе 16 бустерного насоса 12, контроллер 42 инвертора постепенно увеличивает частоту мощности, подводимой к электроприводу 32, для поддержания тока около Iмакс, чтобы максимально увеличить скорость откачки. По мере того, как уменьшается давление газа, поступающего в бустерный насос 12, также уменьшается плотность этого газа, и, таким образом, уменьшается риск перегрева бустерного насоса 12, когда уменьшается давление на входе. Поэтому для того, чтобы максимально увеличить производительность бустерного насоса 12 во время дальнейшего вакуумирования камеры 10, контроллер 42 инвертора увеличивает значение fмакс для третьей стадии вакуумирования камеры 10 при низком давлении «L». Увеличение значения fмакс может быть запущено при:
истечении второго, предварительно установленного периода времени; и
когда давление газа в насосной системе достигло второго, предварительно установленного значения, которое меньше, чем первое, предварительно установленное значение.
Второе предварительно установленное значение может быть обнаружено по сигналу, принятому от любого из датчиков 44, 46. Например, как показано на фиг.4, значение fмакс может быть увеличено, когда давление газа на входе 16 бустерного насоса 12, как показывает выходной сигнал от датчика 44, падает ниже второго предварительно установленного значения, которое в данном случае равно около 3 мбар. В качестве альтернативы fмакс может быть увеличена, когда давление газа на выходе 22 бустерного насоса 12, как показывает выходной сигнал от датчика 46, падает ниже второго предварительно установленного значения. В тех случаях, когда первое и второе предварительно установленные значения определяются только по входному сигналу от датчика 44, не требуется применение датчиков 46, 52. С другой стороны, может быть использована зависимость (зависимости) между двумя или большим числом сигналов давления для получения подходящего сигнала управления.
Таким образом, насосная система способна сочетать преимущества бустерного насоса 12, выпускающего воздух в атмосферу при высоких давлениях на входе, с увеличенной скоростью откачки, при этом сохраняется контроль в диапазоне рабочих температур при промежуточных давлениях на входе и, кроме того, обеспечивается увеличенная скорость откачки при низких давлениях.
На фиг.5 и 6 показан альтернативный способ управления блоком 36 привода. Этот способ сходен с тем, который был описан со ссылкой на фиг.2 и 3, за исключением того, что контроллер 42 инвертера регулирует мощность в зависимости от одной или большего числа температур в насосной системе. Как показано, контроллер 42 инвертера принимает от первого датчика 60 температуры первый сигнал, показывающий температуру в насосном механизме. Альтернативно или в дополнение к этому, контроллер 42 инвертера может принимать от второго датчика 62 температуры второй сигнал, показывающий температуру газа в трубопроводе 24, выходящем из бустерного насоса 12. Альтернативно или в дополнение к этому контроллер 42 инвертера может принимать от третьего датчика 70 температуры третий сигнал, показывающий температуру газа в трубопроводе 18, входящем в бустерный насос 12. С другой стороны, может быть использована зависимость (зависимости) между двумя или большим числом сигналов температуры для получения подходящего сигнала управления. Затем контроллер 42 инвертера изменяет мощность и значения для fмакс и Iмакс в зависимости от одного или нескольких сигналов из первого, второго и третьего сигналов. Например, когда одна из температур достигает первого предварительно установленного значения, значение fмакс возвращается к предварительно установленному значению, а когда одна из температур достигает второго предварительно установленного значения, отличающегося от первого значения, значение fмакс увеличивается.
Claims (46)
1. Вакуумная насосная система, содержащая насосный механизм; электропривод для запуска насосного механизма и контроллер для управления электроприводом, при этом контроллер предназначен для установления максимального значения частоты вращения электропривода и максимального значения тока электропривода, а также для регулирования указанных максимальных значений частоты и тока во время работы вакуумной насосной системы, для оптимизации работы вакуумной насосной системы, при этом контроллер конфигурирован для увеличения максимального значения тока в электроприводе во время работы вакуумной насосной системы при относительно высоком давлении и увеличения максимального значения частоты вращения электродвигателя во время работы вакуумной насосной системы при относительно низком давлении.
2. Система по п.1, отличающаяся тем, что содержит инвертер для подвода мощности переменной частоты к электроприводу, при этом контроллер выполнен с возможностью регулирования амплитуды и частоты мощности, подводимой к электроприводу, во время работы вакуумной насосной системы.
3. Система по любому из пп.1 или 2, отличающаяся тем, что контроллер выполнен с возможностью приема входного сигнала от по меньшей мере одного датчика для контроля одного или большего числа состояний в системе и регулирования, по меньшей мере, одного из указанных максимальных значений в зависимости от контролируемых состояний.
4. Система по п.3, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью формирования сигнала, показывающего давление газа в вакуумной насосной системе, при этом контроллер выполнен с возможностью регулирования, по меньшей мере, одного из указанных максимальных значений в зависимости от принятого сигнала.
5. Система по п.4, отличающаяся тем, что контроллер выполнен с возможностью регулирования максимального значения тока в электроприводе, когда давление газа ниже первого заданного значения.
6. Система по п.5, отличающаяся тем, что первое предварительно установленное значение составляет около 100 мбар.
7. Система по п.5, отличающаяся тем, что контроллер выполнен с возможностью регулирования максимального значения частоты вращения электропривода, когда давление газа ниже второго заданного значения, при этом второе заданное значение ниже, чем первое заданное значение.
8. Система по п.7, отличающаяся тем, что второе заданное значение находится в пределах от 1 до 100 мбар.
9. Система по п.8, отличающаяся тем, что второе заданное значение находится в пределах от 10 до 100 мбар.
10. Система по п.4, отличающаяся тем, что два датчика выполнены с возможностью определения соответствующих перепадов давления в вакуумной насосной системе, а контроллер выполнен с возможностью регулирования, по меньшей мере, одного из максимальных значений в зависимости от соотношения между двумя определенными давлениями.
11. Система по п.4, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью определения давления газа, поступающего к насосному механизму.
12. Система по п.4, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью определения давления газа, выходящего из насосного механизма.
13. Система по п.1, отличающаяся тем, что содержит редукционный клапан, гидравлически сообщающийся с выходом из насосного механизма для избирательного выпуска в атмосферу газа, сжатого насосным механизмом.
14. Система по п.13, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью опознавания положения редукционного клапана, а контроллер выполнен с возможностью регулирования, по меньшей мере, одного из максимальных значений в зависимости от опознанного положения.
15. Система по п.14, отличающаяся тем, что контроллер выполнен с возможностью уменьшения максимального значения тока в электроприводе, когда редукционный клапан переключается от открытого положения в закрытое положение.
16. Система по любому из пп.13-15, отличающаяся тем, что редукционный клапан выполнен с возможностью переключения из закрытого положения в открытое положение, когда давление газа, сжатого насосным механизмом, выше атмосферного давления.
17. Система по п.3, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью подачи сигнала, показывающего температуру в вакуумной насосной системе, при этом контроллер выполнен с возможностью регулирования, по меньшей мере, одного из указанных максимальных значений в зависимости от принятых сигналов.
18. Система по п.17, отличающаяся тем, что контроллер выполнен с возможностью регулирования максимального значения тока электропривода, когда температура выше первого заданного значения.
19. Система по п.18, отличающаяся тем, что контроллер выполнен с возможностью регулирования максимального значения частоты вращения электропривода, когда температура выше второго заданного значения, при этом второе заданное значение отличается от первого заданного значения.
20. Система по п.17, отличающаяся тем, что два датчика выполнены с возможностью определения соответствующих различных температур в вакуумной насосной системе, а контроллер выполнен с возможностью регулирования, по меньшей мере, одного из максимальных значений в зависимости от соотношения между определенными температурами.
21. Система по п.17, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью передачи сигнала, показывающего температуру газа, выходящего из насосного механизма.
22. Система по п.17, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью передачи сигнала, показывающего температуру газа, входящего в насосный механизм.
23. Система по п.17, отличающаяся тем, что, по меньшей мере, один датчик выполнен с возможностью передачи сигнала, показывающего температуру насосного механизма.
24. Система по любому из пп.1 и 2, отличающаяся тем, что контроллер выполнен с возможностью регулирования максимальных значений в соответствии с заданным временным соотношением.
25. Система по п.3, отличающаяся тем, что контроллер выполнен с возможностью регулирования максимальных значений в соответствии с заданным временным соотношением.
26. Способ управления вакуумной насосной системой, содержащей насосный механизм и электропривод для запуска насосного механизма, заключающийся в том, что устанавливают максимальное значение частоты вращения электропривода и максимальное значение тока электропривода и регулируют указанные максимальные значения во время работы вакуумной насосной системы для оптимизации режима работы вакуумной насосной системы, при этом увеличивают максимальное значение тока электропривода во время работы вакуумной насосной системы при относительно высоком давлении и увеличивают максимальное значение частоты вращения электропривода во время работы вакуумной насосной системы при относительно низком давлении.
27. Способ по п.26, отличающийся тем, что во время работы вакуумной насосной системы регулируют амплитуду и частоту мощности, подаваемой на электропривод.
28. Способ по любому из пп.26 и 27, отличающийся тем, что регулируют, по меньшей мере, одно из максимальных значений в зависимости от одного или большего числа рабочих состояний системы.
29. Способ по п.28, отличающийся тем, что регулируют, по меньшей мере, одно из указанных максимальных значений в зависимости от, по меньшей мере, одного давления газа в вакуумной насосной системе.
30. Способ по п.29, отличающийся тем, что уменьшают максимальное значение тока электропривода, когда давление газа падает ниже первого заданного значения.
31. Способ по п.30, отличающийся тем, что первое заданное значение составляет выше 100 мбар.
32. Способ по п.31, отличающийся тем, что уменьшают максимальное значение частоты вращения электропривода, когда давление газа падает ниже второго заданного значения, при этом второе заданное значение ниже, чем первое заданное значение.
33. Способ по п.32, отличающийся тем, что второе заданное значение находится в пределах от 1 до 100 мбар.
34. Способ по п.33, отличающийся тем, что второе заданное значение находится в пределах от 10 до 100 мбар.
35. Способ по п.29, отличающийся тем, что регулируют, по меньшей мере, одно из указанных максимальных значений в зависимости от соотношения между двумя давлениями газа в вакуумной насосной системе.
36. Способ по п.30, отличающийся тем, что в качестве, по меньшей мере, одного давления газа используют давление газа, поступающего к насосному механизму.
37. Способ по п.30, отличающийся тем, что в качестве, по меньшей мере, одного давления газа используют давление газа, выходящего из насосного механизма.
38. Способ по п.26, отличающийся тем, что вакуумная насосная система содержит редукционный клапан позади по ходу потока насосного механизма, при этом регулируют, по меньшей мере, одно из максимальных значений в зависимости от положения редукционного клапана.
39. Способ по п.38, отличающийся тем, что уменьшают максимальное значение тока электропривода, когда редукционный клапан переключается из открытого положения в закрытое положение.
40. Способ по п.29, отличающийся тем, что регулируют по меньшей мере одно из указанных максимальных значений в зависимости от по меньшей мере одной температуры вакуумной насосной системы.
41. Способ по п.40, отличающийся тем, что уменьшают максимальное значение тока электропривода, когда по меньшей мере одна температура выше первого заданного значения.
42. Способ по п.41, отличающийся тем, что увеличивают максимальное значение частоты вращения электропривода, когда по меньшей мере одна температура выше второго заданного значения, при этом второе заданное значение отличается от первого заданного значения.
43. Способ по п.40, отличающийся тем, что регулируют, по меньшей мере, одно из указанных максимальных значений в зависимости от соотношения между по меньшей мере двумя температурами вакуумной насосной системы.
44. Способ по любому из пп.40-43, отличающийся тем, что в качестве по меньшей мере одной температуры используют температуру газа, выходящего из насосного механизма.
45. Способ по любому из пп.40-43, отличающийся тем, что в качестве по меньшей мере одной температуры используют температуру насосного механизма.
46. Способ по любому из пп.26-28, отличающийся тем, что регулируют максимальные значения в соответствии с заданным временным соотношением.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB0502149A GB0502149D0 (en) | 2005-02-02 | 2005-02-02 | Method of operating a pumping system |
| GB0502149.8 | 2005-02-02 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2007132873A RU2007132873A (ru) | 2009-03-10 |
| RU2421632C2 true RU2421632C2 (ru) | 2011-06-20 |
Family
ID=34307860
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2007132873A RU2421632C2 (ru) | 2005-02-02 | 2006-01-23 | Способ работы насосной системы |
Country Status (9)
| Country | Link |
|---|---|
| US (2) | US9062684B2 (ru) |
| EP (1) | EP1844237B1 (ru) |
| JP (1) | JP5189842B2 (ru) |
| KR (1) | KR101394718B1 (ru) |
| CN (1) | CN101184921B (ru) |
| GB (1) | GB0502149D0 (ru) |
| RU (1) | RU2421632C2 (ru) |
| TW (1) | TWI372209B (ru) |
| WO (1) | WO2006082366A1 (ru) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015065228A1 (ru) * | 2013-10-31 | 2015-05-07 | Владимир Григорьевич МАКАРЕНКО | Способ выпаривания текучих продуктов и выпарное устройство для его осуществления |
| RU2564288C2 (ru) * | 2013-11-05 | 2015-09-27 | Андрей Федорович Александров | Плёнка двумерно упорядоченного линейно-цепочечного углерода и способ её получения |
| RU2796418C1 (ru) * | 2019-12-04 | 2023-05-23 | Ателье Буш Са | Насосная система с резервом и способ перекачивания посредством этой насосной системы |
Families Citing this family (137)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB0502149D0 (en) | 2005-02-02 | 2005-03-09 | Boc Group Inc | Method of operating a pumping system |
| GB0508872D0 (en) * | 2005-04-29 | 2005-06-08 | Boc Group Plc | Method of operating a pumping system |
| DE102007060174A1 (de) * | 2007-12-13 | 2009-06-25 | Oerlikon Leybold Vacuum Gmbh | Vakuumpumpe sowie Verfahren zum Betreiben einer Vakuumpumpe |
| EP2450645B1 (en) | 2008-01-11 | 2014-10-08 | Johnson Controls Technology Company | Vapor compression system |
| TWI467092B (zh) * | 2008-09-10 | 2015-01-01 | Ulvac Inc | 真空排氣裝置 |
| KR100988283B1 (ko) * | 2008-09-18 | 2010-10-18 | 자동차부품연구원 | 미션오일 공급펌프 구동장치 및 방법 |
| US9324576B2 (en) | 2010-05-27 | 2016-04-26 | Applied Materials, Inc. | Selective etch for silicon films |
| US10283321B2 (en) | 2011-01-18 | 2019-05-07 | Applied Materials, Inc. | Semiconductor processing system and methods using capacitively coupled plasma |
| CN102072185B (zh) * | 2011-01-27 | 2013-05-29 | 高毅夫 | 基于烟尘量计算优化模型的除尘风机节能控制方法 |
| US8999856B2 (en) | 2011-03-14 | 2015-04-07 | Applied Materials, Inc. | Methods for etch of sin films |
| US9064815B2 (en) | 2011-03-14 | 2015-06-23 | Applied Materials, Inc. | Methods for etch of metal and metal-oxide films |
| DE102011076785A1 (de) * | 2011-05-31 | 2012-12-06 | Robert Bosch Gmbh | Steuervorrichtung für eine elektrische Vakuumpumpe und Verfahren zum Ansteuern einer elektrischen Vakuumpumpe |
| CN102508474B (zh) * | 2011-11-01 | 2014-06-25 | 杭州哲达科技股份有限公司 | 工业企业用冷却循环水优化运行控制系统 |
| JP5557056B2 (ja) * | 2011-11-30 | 2014-07-23 | アイシン精機株式会社 | ポンプ制御ユニット |
| US20150017024A1 (en) * | 2012-03-02 | 2015-01-15 | Shell Oil Company | Method of controlling an electric submersible pump |
| GB2501735B (en) * | 2012-05-02 | 2015-07-22 | Edwards Ltd | Method and apparatus for warming up a vacuum pump arrangement |
| GB2502134B (en) * | 2012-05-18 | 2015-09-09 | Edwards Ltd | Method and apparatus for adjusting operating parameters of a vacuum pump arrangement |
| KR101995358B1 (ko) * | 2012-06-28 | 2019-07-02 | 스털링 인더스트리 컨설트 게엠베하 | 챔버를 배기시키기 위한 방법 및 펌프 장치 |
| US9267739B2 (en) | 2012-07-18 | 2016-02-23 | Applied Materials, Inc. | Pedestal with multi-zone temperature control and multiple purge capabilities |
| US9373517B2 (en) | 2012-08-02 | 2016-06-21 | Applied Materials, Inc. | Semiconductor processing with DC assisted RF power for improved control |
| US9023734B2 (en) | 2012-09-18 | 2015-05-05 | Applied Materials, Inc. | Radical-component oxide etch |
| US9132436B2 (en) | 2012-09-21 | 2015-09-15 | Applied Materials, Inc. | Chemical control features in wafer process equipment |
| JP6050081B2 (ja) * | 2012-10-05 | 2016-12-21 | 株式会社荏原製作所 | ドライ真空ポンプ装置 |
| US8921234B2 (en) | 2012-12-21 | 2014-12-30 | Applied Materials, Inc. | Selective titanium nitride etching |
| CN103925214A (zh) * | 2013-01-11 | 2014-07-16 | 珠海格力电器股份有限公司 | 一种精抽泵机组及具有其的精抽系统 |
| US10256079B2 (en) | 2013-02-08 | 2019-04-09 | Applied Materials, Inc. | Semiconductor processing systems having multiple plasma configurations |
| US9362130B2 (en) | 2013-03-01 | 2016-06-07 | Applied Materials, Inc. | Enhanced etching processes using remote plasma sources |
| US9040422B2 (en) | 2013-03-05 | 2015-05-26 | Applied Materials, Inc. | Selective titanium nitride removal |
| US20140271097A1 (en) | 2013-03-15 | 2014-09-18 | Applied Materials, Inc. | Processing systems and methods for halide scavenging |
| US20140311581A1 (en) * | 2013-04-19 | 2014-10-23 | Applied Materials, Inc. | Pressure controller configuration for semiconductor processing applications |
| US9493879B2 (en) | 2013-07-12 | 2016-11-15 | Applied Materials, Inc. | Selective sputtering for pattern transfer |
| US9773648B2 (en) | 2013-08-30 | 2017-09-26 | Applied Materials, Inc. | Dual discharge modes operation for remote plasma |
| US9576809B2 (en) | 2013-11-04 | 2017-02-21 | Applied Materials, Inc. | Etch suppression with germanium |
| US9520303B2 (en) | 2013-11-12 | 2016-12-13 | Applied Materials, Inc. | Aluminum selective etch |
| CN104632629A (zh) * | 2013-11-13 | 2015-05-20 | 中国科学院沈阳科学仪器股份有限公司 | 用于高效抽除小分子量气体的真空系统 |
| US9245762B2 (en) | 2013-12-02 | 2016-01-26 | Applied Materials, Inc. | Procedure for etch rate consistency |
| US9499898B2 (en) | 2014-03-03 | 2016-11-22 | Applied Materials, Inc. | Layered thin film heater and method of fabrication |
| US9299537B2 (en) | 2014-03-20 | 2016-03-29 | Applied Materials, Inc. | Radial waveguide systems and methods for post-match control of microwaves |
| US9903020B2 (en) | 2014-03-31 | 2018-02-27 | Applied Materials, Inc. | Generation of compact alumina passivation layers on aluminum plasma equipment components |
| US9309598B2 (en) | 2014-05-28 | 2016-04-12 | Applied Materials, Inc. | Oxide and metal removal |
| US9425058B2 (en) | 2014-07-24 | 2016-08-23 | Applied Materials, Inc. | Simplified litho-etch-litho-etch process |
| US9496167B2 (en) | 2014-07-31 | 2016-11-15 | Applied Materials, Inc. | Integrated bit-line airgap formation and gate stack post clean |
| US9659753B2 (en) | 2014-08-07 | 2017-05-23 | Applied Materials, Inc. | Grooved insulator to reduce leakage current |
| US9553102B2 (en) | 2014-08-19 | 2017-01-24 | Applied Materials, Inc. | Tungsten separation |
| CN104199310B (zh) * | 2014-09-03 | 2016-10-19 | 国家电网公司 | 海水直流冷却循环水系统潮差影响模型的应用 |
| US9355862B2 (en) | 2014-09-24 | 2016-05-31 | Applied Materials, Inc. | Fluorine-based hardmask removal |
| US9613822B2 (en) | 2014-09-25 | 2017-04-04 | Applied Materials, Inc. | Oxide etch selectivity enhancement |
| US9355922B2 (en) | 2014-10-14 | 2016-05-31 | Applied Materials, Inc. | Systems and methods for internal surface conditioning in plasma processing equipment |
| US9966240B2 (en) | 2014-10-14 | 2018-05-08 | Applied Materials, Inc. | Systems and methods for internal surface conditioning assessment in plasma processing equipment |
| US9771884B2 (en) * | 2014-10-31 | 2017-09-26 | GM Global Technology Operations LLC | System and method for controlling the amount of purge fluid delivered to cylinders of an engine based on an operating parameter of a purge pump |
| WO2016077559A1 (en) | 2014-11-14 | 2016-05-19 | Carrier Corporation | On board chiller capacity calculation |
| US11637002B2 (en) | 2014-11-26 | 2023-04-25 | Applied Materials, Inc. | Methods and systems to enhance process uniformity |
| US10224210B2 (en) | 2014-12-09 | 2019-03-05 | Applied Materials, Inc. | Plasma processing system with direct outlet toroidal plasma source |
| US10573496B2 (en) | 2014-12-09 | 2020-02-25 | Applied Materials, Inc. | Direct outlet toroidal plasma source |
| US9502258B2 (en) | 2014-12-23 | 2016-11-22 | Applied Materials, Inc. | Anisotropic gap etch |
| US11257693B2 (en) | 2015-01-09 | 2022-02-22 | Applied Materials, Inc. | Methods and systems to improve pedestal temperature control |
| US9449846B2 (en) | 2015-01-28 | 2016-09-20 | Applied Materials, Inc. | Vertical gate separation |
| US9728437B2 (en) | 2015-02-03 | 2017-08-08 | Applied Materials, Inc. | High temperature chuck for plasma processing systems |
| US20160225652A1 (en) | 2015-02-03 | 2016-08-04 | Applied Materials, Inc. | Low temperature chuck for plasma processing systems |
| US9881805B2 (en) | 2015-03-02 | 2018-01-30 | Applied Materials, Inc. | Silicon selective removal |
| US9741593B2 (en) | 2015-08-06 | 2017-08-22 | Applied Materials, Inc. | Thermal management systems and methods for wafer processing systems |
| US9691645B2 (en) | 2015-08-06 | 2017-06-27 | Applied Materials, Inc. | Bolted wafer chuck thermal management systems and methods for wafer processing systems |
| US9349605B1 (en) | 2015-08-07 | 2016-05-24 | Applied Materials, Inc. | Oxide etch selectivity systems and methods |
| US10504700B2 (en) | 2015-08-27 | 2019-12-10 | Applied Materials, Inc. | Plasma etching systems and methods with secondary plasma injection |
| DE102016200112A1 (de) * | 2016-01-07 | 2017-07-13 | Leybold Gmbh | Vakuumpumpenantrieb mit Stern-Dreieck-Umschaltung |
| BE1024040B1 (nl) * | 2016-04-08 | 2017-11-06 | Atlas Copco Airpower, N.V. | Elektrisch aangedreven mobiele compressor |
| US10522371B2 (en) | 2016-05-19 | 2019-12-31 | Applied Materials, Inc. | Systems and methods for improved semiconductor etching and component protection |
| US10504754B2 (en) | 2016-05-19 | 2019-12-10 | Applied Materials, Inc. | Systems and methods for improved semiconductor etching and component protection |
| US9865484B1 (en) | 2016-06-29 | 2018-01-09 | Applied Materials, Inc. | Selective etch using material modification and RF pulsing |
| US10062575B2 (en) | 2016-09-09 | 2018-08-28 | Applied Materials, Inc. | Poly directional etch by oxidation |
| US10629473B2 (en) | 2016-09-09 | 2020-04-21 | Applied Materials, Inc. | Footing removal for nitride spacer |
| US10546729B2 (en) | 2016-10-04 | 2020-01-28 | Applied Materials, Inc. | Dual-channel showerhead with improved profile |
| US10062585B2 (en) | 2016-10-04 | 2018-08-28 | Applied Materials, Inc. | Oxygen compatible plasma source |
| US9934942B1 (en) | 2016-10-04 | 2018-04-03 | Applied Materials, Inc. | Chamber with flow-through source |
| US9721789B1 (en) | 2016-10-04 | 2017-08-01 | Applied Materials, Inc. | Saving ion-damaged spacers |
| US10062579B2 (en) | 2016-10-07 | 2018-08-28 | Applied Materials, Inc. | Selective SiN lateral recess |
| US9947549B1 (en) | 2016-10-10 | 2018-04-17 | Applied Materials, Inc. | Cobalt-containing material removal |
| US10163696B2 (en) | 2016-11-11 | 2018-12-25 | Applied Materials, Inc. | Selective cobalt removal for bottom up gapfill |
| US9768034B1 (en) | 2016-11-11 | 2017-09-19 | Applied Materials, Inc. | Removal methods for high aspect ratio structures |
| US10242908B2 (en) | 2016-11-14 | 2019-03-26 | Applied Materials, Inc. | Airgap formation with damage-free copper |
| US10026621B2 (en) | 2016-11-14 | 2018-07-17 | Applied Materials, Inc. | SiN spacer profile patterning |
| DE202016007609U1 (de) | 2016-12-15 | 2018-03-26 | Leybold Gmbh | Vakuumpumpsystem |
| US10566206B2 (en) | 2016-12-27 | 2020-02-18 | Applied Materials, Inc. | Systems and methods for anisotropic material breakthrough |
| US10403507B2 (en) | 2017-02-03 | 2019-09-03 | Applied Materials, Inc. | Shaped etch profile with oxidation |
| US10431429B2 (en) | 2017-02-03 | 2019-10-01 | Applied Materials, Inc. | Systems and methods for radial and azimuthal control of plasma uniformity |
| US10043684B1 (en) | 2017-02-06 | 2018-08-07 | Applied Materials, Inc. | Self-limiting atomic thermal etching systems and methods |
| US10319739B2 (en) | 2017-02-08 | 2019-06-11 | Applied Materials, Inc. | Accommodating imperfectly aligned memory holes |
| US10943834B2 (en) | 2017-03-13 | 2021-03-09 | Applied Materials, Inc. | Replacement contact process |
| US10319649B2 (en) | 2017-04-11 | 2019-06-11 | Applied Materials, Inc. | Optical emission spectroscopy (OES) for remote plasma monitoring |
| JP2018178846A (ja) * | 2017-04-12 | 2018-11-15 | 株式会社荏原製作所 | 真空ポンプ装置の運転制御装置、及び運転制御方法 |
| US11276590B2 (en) | 2017-05-17 | 2022-03-15 | Applied Materials, Inc. | Multi-zone semiconductor substrate supports |
| US11276559B2 (en) | 2017-05-17 | 2022-03-15 | Applied Materials, Inc. | Semiconductor processing chamber for multiple precursor flow |
| US10497579B2 (en) | 2017-05-31 | 2019-12-03 | Applied Materials, Inc. | Water-free etching methods |
| US10049891B1 (en) | 2017-05-31 | 2018-08-14 | Applied Materials, Inc. | Selective in situ cobalt residue removal |
| FR3067069B1 (fr) * | 2017-06-06 | 2019-08-02 | Pfeiffer Vacuum | Procede de surveillance d'un etat de fonctionnement d'un dispositif de pompage |
| US10920320B2 (en) | 2017-06-16 | 2021-02-16 | Applied Materials, Inc. | Plasma health determination in semiconductor substrate processing reactors |
| US10541246B2 (en) | 2017-06-26 | 2020-01-21 | Applied Materials, Inc. | 3D flash memory cells which discourage cross-cell electrical tunneling |
| US10727080B2 (en) | 2017-07-07 | 2020-07-28 | Applied Materials, Inc. | Tantalum-containing material removal |
| US10541184B2 (en) | 2017-07-11 | 2020-01-21 | Applied Materials, Inc. | Optical emission spectroscopic techniques for monitoring etching |
| US10354889B2 (en) | 2017-07-17 | 2019-07-16 | Applied Materials, Inc. | Non-halogen etching of silicon-containing materials |
| US10170336B1 (en) | 2017-08-04 | 2019-01-01 | Applied Materials, Inc. | Methods for anisotropic control of selective silicon removal |
| US10043674B1 (en) | 2017-08-04 | 2018-08-07 | Applied Materials, Inc. | Germanium etching systems and methods |
| US10297458B2 (en) | 2017-08-07 | 2019-05-21 | Applied Materials, Inc. | Process window widening using coated parts in plasma etch processes |
| US10128086B1 (en) | 2017-10-24 | 2018-11-13 | Applied Materials, Inc. | Silicon pretreatment for nitride removal |
| US10283324B1 (en) | 2017-10-24 | 2019-05-07 | Applied Materials, Inc. | Oxygen treatment for nitride etching |
| US10256112B1 (en) | 2017-12-08 | 2019-04-09 | Applied Materials, Inc. | Selective tungsten removal |
| EP3499039B1 (de) * | 2017-12-15 | 2021-03-31 | Pfeiffer Vacuum Gmbh | Schraubenvakuumpumpe |
| US10903054B2 (en) | 2017-12-19 | 2021-01-26 | Applied Materials, Inc. | Multi-zone gas distribution systems and methods |
| US11328909B2 (en) | 2017-12-22 | 2022-05-10 | Applied Materials, Inc. | Chamber conditioning and removal processes |
| US10854426B2 (en) | 2018-01-08 | 2020-12-01 | Applied Materials, Inc. | Metal recess for semiconductor structures |
| US10964512B2 (en) | 2018-02-15 | 2021-03-30 | Applied Materials, Inc. | Semiconductor processing chamber multistage mixing apparatus and methods |
| US10679870B2 (en) | 2018-02-15 | 2020-06-09 | Applied Materials, Inc. | Semiconductor processing chamber multistage mixing apparatus |
| TWI716818B (zh) | 2018-02-28 | 2021-01-21 | 美商應用材料股份有限公司 | 形成氣隙的系統及方法 |
| US10593560B2 (en) | 2018-03-01 | 2020-03-17 | Applied Materials, Inc. | Magnetic induction plasma source for semiconductor processes and equipment |
| US10319600B1 (en) | 2018-03-12 | 2019-06-11 | Applied Materials, Inc. | Thermal silicon etch |
| US10497573B2 (en) | 2018-03-13 | 2019-12-03 | Applied Materials, Inc. | Selective atomic layer etching of semiconductor materials |
| US10573527B2 (en) | 2018-04-06 | 2020-02-25 | Applied Materials, Inc. | Gas-phase selective etching systems and methods |
| US10490406B2 (en) | 2018-04-10 | 2019-11-26 | Appled Materials, Inc. | Systems and methods for material breakthrough |
| US10699879B2 (en) | 2018-04-17 | 2020-06-30 | Applied Materials, Inc. | Two piece electrode assembly with gap for plasma control |
| US10886137B2 (en) | 2018-04-30 | 2021-01-05 | Applied Materials, Inc. | Selective nitride removal |
| US10872778B2 (en) | 2018-07-06 | 2020-12-22 | Applied Materials, Inc. | Systems and methods utilizing solid-phase etchants |
| US10755941B2 (en) | 2018-07-06 | 2020-08-25 | Applied Materials, Inc. | Self-limiting selective etching systems and methods |
| US10672642B2 (en) | 2018-07-24 | 2020-06-02 | Applied Materials, Inc. | Systems and methods for pedestal configuration |
| US10892198B2 (en) | 2018-09-14 | 2021-01-12 | Applied Materials, Inc. | Systems and methods for improved performance in semiconductor processing |
| US11049755B2 (en) | 2018-09-14 | 2021-06-29 | Applied Materials, Inc. | Semiconductor substrate supports with embedded RF shield |
| US11062887B2 (en) | 2018-09-17 | 2021-07-13 | Applied Materials, Inc. | High temperature RF heater pedestals |
| US11417534B2 (en) | 2018-09-21 | 2022-08-16 | Applied Materials, Inc. | Selective material removal |
| US11682560B2 (en) | 2018-10-11 | 2023-06-20 | Applied Materials, Inc. | Systems and methods for hafnium-containing film removal |
| FR3087504B1 (fr) * | 2018-10-17 | 2020-10-30 | Pfeiffer Vacuum | Procede de controle de la temperature d’une pompe a vide, pompe a vide et installation associees |
| US11121002B2 (en) | 2018-10-24 | 2021-09-14 | Applied Materials, Inc. | Systems and methods for etching metals and metal derivatives |
| US11437242B2 (en) | 2018-11-27 | 2022-09-06 | Applied Materials, Inc. | Selective removal of silicon-containing materials |
| US11721527B2 (en) | 2019-01-07 | 2023-08-08 | Applied Materials, Inc. | Processing chamber mixing systems |
| US10920319B2 (en) | 2019-01-11 | 2021-02-16 | Applied Materials, Inc. | Ceramic showerheads with conductive electrodes |
| CN111029319B (zh) * | 2019-11-19 | 2021-09-17 | 西安西整熔断器有限公司 | 一种电触发晶闸管换流阀及其使用方法 |
| GB2592573A (en) * | 2019-12-19 | 2021-09-08 | Leybold France S A S | Lubricant-sealed vacuum pump, lubricant filter and method. |
| US11668304B2 (en) | 2020-02-27 | 2023-06-06 | Gardner Denver, Inc. | Low coefficient of expansion rotors for vacuum boosters |
| US11746782B2 (en) | 2020-04-03 | 2023-09-05 | Gardner Denver, Inc. | Low coefficient of expansion rotors for blowers |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0574623A1 (en) * | 1991-01-29 | 1993-12-22 | Vickers Incorporated | Power transmission |
| US5944049A (en) * | 1997-07-15 | 1999-08-31 | Applied Materials, Inc. | Apparatus and method for regulating a pressure in a chamber |
| US6244825B1 (en) * | 1998-10-01 | 2001-06-12 | International Business Machines Corporation | Pump-protecting device, pump-protecting method and pumping apparatus |
Family Cites Families (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5863088A (ja) | 1981-10-09 | 1983-04-14 | Ebara Corp | 揚水ポンプ系における保護装置 |
| JPS63283492A (ja) | 1987-05-15 | 1988-11-21 | Mitsubishi Electric Corp | 圧縮機用電動機の制御装置 |
| JPS6419198U (ru) | 1987-07-24 | 1989-01-31 | ||
| IT1270767B (it) * | 1993-03-18 | 1997-05-07 | Cartigliano Spa Off | Impianto a vuoto per esseccatoi di pelli industriali a pianali multipli ed essiccatoio incorporante tale impianto |
| KR100344716B1 (ko) | 1993-09-20 | 2002-11-23 | 가부시키 가이샤 에바라 세이사꾸쇼 | 펌프의운전제어장치 |
| DE4421065A1 (de) | 1994-06-16 | 1995-12-21 | Raytek Sensorik Gmbh | Vorrichtung zur Temperaturmessung |
| JP3847357B2 (ja) * | 1994-06-28 | 2006-11-22 | 株式会社荏原製作所 | 真空系の排気装置 |
| US5618167A (en) | 1994-07-28 | 1997-04-08 | Ebara Corporation | Vacuum pump apparatus having peltier elements for cooling the motor & bearing housing and heating the outer housing |
| US5624239A (en) * | 1994-12-14 | 1997-04-29 | Osika; Thomas W. | Portable pneumatic vacuum source apparatus and method |
| WO1997022914A1 (fr) * | 1995-12-19 | 1997-06-26 | Hitachi Construction Machinery Co., Ltd. | Methode de correction de sortie pour appareil de commande, appareil de commande et appareil de commande de pompe hydraulique |
| JP3125207B2 (ja) | 1995-07-07 | 2001-01-15 | 東京エレクトロン株式会社 | 真空処理装置 |
| US6158965A (en) | 1996-07-30 | 2000-12-12 | Alaris Medical Systems, Inc. | Fluid flow resistance monitoring system |
| JP3767052B2 (ja) | 1996-11-30 | 2006-04-19 | アイシン精機株式会社 | 多段式真空ポンプ |
| JP3057486B2 (ja) | 1997-01-22 | 2000-06-26 | セイコー精機株式会社 | ターボ分子ポンプ |
| US6123522A (en) | 1997-07-22 | 2000-09-26 | Koyo Seiko Co., Ltd. | Turbo molecular pump |
| JPH1137087A (ja) | 1997-07-24 | 1999-02-09 | Osaka Shinku Kiki Seisakusho:Kk | 分子ポンプ |
| JPH11132186A (ja) | 1997-10-29 | 1999-05-18 | Shimadzu Corp | ターボ分子ポンプ |
| US6695589B1 (en) * | 1999-03-26 | 2004-02-24 | General Motors Corporation | Control for an electric motor driven pump |
| US6257001B1 (en) | 1999-08-24 | 2001-07-10 | Lucent Technologies, Inc. | Cryogenic vacuum pump temperature sensor |
| FR2801645B1 (fr) * | 1999-11-30 | 2005-09-23 | Matsushita Electric Ind Co Ltd | Dispositif d'entrainement d'un compresseur lineaire, support et ensemble d'informations |
| JP2002048088A (ja) | 2000-07-31 | 2002-02-15 | Seiko Instruments Inc | 真空ポンプ |
| US7143016B1 (en) * | 2001-03-02 | 2006-11-28 | Rockwell Automation Technologies, Inc. | System and method for dynamic multi-objective optimization of pumping system operation and diagnostics |
| DE10113251A1 (de) | 2001-03-19 | 2002-10-02 | Siemens Ag | Druckerzeuger für strömende Medien |
| DE10114969A1 (de) | 2001-03-27 | 2002-10-10 | Leybold Vakuum Gmbh | Turbomolekularpumpe |
| KR100408068B1 (ko) * | 2001-07-31 | 2003-12-03 | 엘지전자 주식회사 | 왕복동식 압축기의 스트로크 제어장치 및 방법 |
| JP4156830B2 (ja) | 2001-12-13 | 2008-09-24 | エドワーズ株式会社 | 真空ポンプ |
| JP2003287463A (ja) | 2002-03-28 | 2003-10-10 | Boc Edwards Technologies Ltd | 放射温度測定装置及び該放射温度測定装置を搭載したターボ分子ポンプ |
| US6739840B2 (en) | 2002-05-22 | 2004-05-25 | Applied Materials Inc | Speed control of variable speed pump |
| JP2004116319A (ja) | 2002-09-24 | 2004-04-15 | Boc Edwards Technologies Ltd | 真空ポンプ |
| JP3967245B2 (ja) | 2002-09-30 | 2007-08-29 | 株式会社東芝 | 回転機の寿命予測方法及び回転機を有する製造装置 |
| GB0223769D0 (en) | 2002-10-14 | 2002-11-20 | Boc Group Plc | A pump |
| JP3923422B2 (ja) * | 2002-12-11 | 2007-05-30 | 株式会社日立産機システム | スクリュー圧縮機 |
| JP2004197644A (ja) * | 2002-12-18 | 2004-07-15 | Toyota Industries Corp | 真空ポンプの制御装置 |
| ITTO20030392A1 (it) * | 2003-05-28 | 2004-11-29 | Varian Spa | Sistema di pompaggio per vuoto. |
| JP4218756B2 (ja) | 2003-10-17 | 2009-02-04 | 株式会社荏原製作所 | 真空排気装置 |
| JP4558349B2 (ja) * | 2004-03-02 | 2010-10-06 | 財団法人国際科学振興財団 | 真空ポンプ |
| JP2005320905A (ja) | 2004-05-10 | 2005-11-17 | Boc Edwards Kk | 真空ポンプ |
| GB0502149D0 (en) | 2005-02-02 | 2005-03-09 | Boc Group Inc | Method of operating a pumping system |
| GB0508872D0 (en) | 2005-04-29 | 2005-06-08 | Boc Group Plc | Method of operating a pumping system |
| JP5045894B2 (ja) | 2006-05-09 | 2012-10-10 | 株式会社島津製作所 | 磁気軸受装置 |
-
2005
- 2005-02-02 GB GB0502149A patent/GB0502149D0/en not_active Ceased
-
2006
- 2006-01-23 US US11/883,616 patent/US9062684B2/en active Active
- 2006-01-23 WO PCT/GB2006/000221 patent/WO2006082366A1/en active Application Filing
- 2006-01-23 KR KR20077017769A patent/KR101394718B1/ko active IP Right Grant
- 2006-01-23 RU RU2007132873A patent/RU2421632C2/ru active
- 2006-01-23 EP EP06701044.7A patent/EP1844237B1/en active Active
- 2006-01-23 CN CN2006800092505A patent/CN101184921B/zh active Active
- 2006-01-23 JP JP2007553680A patent/JP5189842B2/ja active Active
- 2006-01-27 TW TW095103593A patent/TWI372209B/zh active
-
2014
- 2014-12-12 US US14/569,170 patent/US9903378B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0574623A1 (en) * | 1991-01-29 | 1993-12-22 | Vickers Incorporated | Power transmission |
| US5944049A (en) * | 1997-07-15 | 1999-08-31 | Applied Materials, Inc. | Apparatus and method for regulating a pressure in a chamber |
| US6244825B1 (en) * | 1998-10-01 | 2001-06-12 | International Business Machines Corporation | Pump-protecting device, pump-protecting method and pumping apparatus |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015065228A1 (ru) * | 2013-10-31 | 2015-05-07 | Владимир Григорьевич МАКАРЕНКО | Способ выпаривания текучих продуктов и выпарное устройство для его осуществления |
| RU2564288C2 (ru) * | 2013-11-05 | 2015-09-27 | Андрей Федорович Александров | Плёнка двумерно упорядоченного линейно-цепочечного углерода и способ её получения |
| RU2796418C1 (ru) * | 2019-12-04 | 2023-05-23 | Ателье Буш Са | Насосная система с резервом и способ перекачивания посредством этой насосной системы |
| RU2796418C9 (ru) * | 2019-12-04 | 2024-03-26 | Ателье Буш Са | Насосная система с резервом и способ перекачивания посредством этой насосной системы |
Also Published As
| Publication number | Publication date |
|---|---|
| TW200632221A (en) | 2006-09-16 |
| WO2006082366A1 (en) | 2006-08-10 |
| JP2008529472A (ja) | 2008-07-31 |
| JP5189842B2 (ja) | 2013-04-24 |
| KR101394718B1 (ko) | 2014-05-15 |
| TWI372209B (en) | 2012-09-11 |
| US9903378B2 (en) | 2018-02-27 |
| CN101184921A (zh) | 2008-05-21 |
| US20150125312A1 (en) | 2015-05-07 |
| EP1844237B1 (en) | 2015-11-18 |
| CN101184921B (zh) | 2010-05-26 |
| WO2006082366A8 (en) | 2007-11-08 |
| US9062684B2 (en) | 2015-06-23 |
| KR20070099635A (ko) | 2007-10-09 |
| EP1844237A1 (en) | 2007-10-17 |
| GB0502149D0 (en) | 2005-03-09 |
| US20100047080A1 (en) | 2010-02-25 |
| RU2007132873A (ru) | 2009-03-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2421632C2 (ru) | Способ работы насосной системы | |
| JP5769722B2 (ja) | 低電力消費の排気方法及び装置 | |
| US8753095B2 (en) | Pumping system and method of operation | |
| KR100576761B1 (ko) | 진공배기장치 및 방법 | |
| WO2006097679A1 (en) | Vacuum pumping arrangement | |
| KR101707267B1 (ko) | 드라이 진공 펌프 장치 및 드라이 진공 펌프 장치에 사용되는 제어 장치 | |
| CN109477485B (zh) | 用于降低负载锁中的压力的方法和相关泵单元 | |
| JPWO2018179789A1 (ja) | 気体圧縮機 | |
| TWI753219B (zh) | 乾式真空泵及用於控制真空泵的同步馬達之方法 | |
| JP4180265B2 (ja) | 真空排気装置の運転方法 | |
| US9334864B2 (en) | Method of operating a pumping system | |
| JP2003139055A (ja) | 真空排気装置 | |
| WO2006106302A1 (en) | Temperature control apparatus | |
| JP2012524204A (ja) | 容積形ポンプのための粗引き法 | |
| WO2006051260A1 (en) | Vacuum pumping system | |
| JP2020183738A (ja) | 真空排気装置及びその運転方法 | |
| JP3941147B2 (ja) | 真空排気装置及びそのメンテナンス方法 | |
| GB2592283A (en) | Method to operate a vacuum system | |
| JP2019081944A (ja) | 真空バルブの制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PD4A | Correction of name of patent owner |