RU2310231C2 - Пространственно-временное прогнозирование для двунаправлено прогнозируемых (в) изображений и прогнозирование вектора движения для компенсации движения множественных изображений с помощью эталона - Google Patents
Пространственно-временное прогнозирование для двунаправлено прогнозируемых (в) изображений и прогнозирование вектора движения для компенсации движения множественных изображений с помощью эталона Download PDFInfo
- Publication number
- RU2310231C2 RU2310231C2 RU2003116281/09A RU2003116281A RU2310231C2 RU 2310231 C2 RU2310231 C2 RU 2310231C2 RU 2003116281/09 A RU2003116281/09 A RU 2003116281/09A RU 2003116281 A RU2003116281 A RU 2003116281A RU 2310231 C2 RU2310231 C2 RU 2310231C2
- Authority
- RU
- Russia
- Prior art keywords
- direct mode
- macroblock
- prediction
- motion vector
- image
- Prior art date
Links
Images



Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/577—Motion compensation with bidirectional frame interpolation, i.e. using B-pictures
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/107—Selection of coding mode or of prediction mode between spatial and temporal predictive coding, e.g. picture refresh
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/142—Detection of scene cut or scene change
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/56—Motion estimation with initialisation of the vector search, e.g. estimating a good candidate to initiate a search
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/573—Motion compensation with multiple frame prediction using two or more reference frames in a given prediction direction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/58—Motion compensation with long-term prediction, i.e. the reference frame for a current frame not being the temporally closest one
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/85—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression
- H04N19/87—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving scene cut or scene change detection in combination with video compression
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
Abstract
Изобретение относится к видеокодированию, в частности к способам и устройствам для обеспечения улучшенного кодирования и/или способов прогнозирования, связанных с различными типами видеоданных. Техническим результатом является создание усовершенствованного способа кодирования, который может поддерживать новейшие модели и режимы использования двунаправлено прогнозируемых (В) изображений в последовательности видеоданных с использованием пространственного прогнозирования или временного расстояния. Предложен способ для использования при кодировании видеоданных в видеокодере, содержащий осуществление решения прогнозирования пространственно/временного вектора движения для, по меньшей мере, одного макроблока прямого режима в В-изображении, и сигнализацию информации решения прогнозирования пространственно/временного вектора движения для, по меньшей мере, одного макроблока прямого режима в заголовке, который включает в себя информацию заголовка для множества макроблоков в В-изображении, при этом сигнализация упомянутой информации решения прогнозирования пространственно/временного вектора движения в заголовке передает в видеодекодер решение прогнозирования пространственно/временного вектора движения для, по меньшей мере, одного макроблока прямого режима в В-изображении. 2 н. и 16 з.п. ф-лы, 17 ил.
Description
Связанные патентные заявки
Настоящая непредварительная заявка США на патент заявляет приоритет и при этом включает посредством ссылки все раскрытие совместно поданной предварительной патентной заявки США № 60/385965 от 3 июня 2002 на "Пространственно-временное прогнозирование для двунаправлено прогнозируемых (B) изображений и прогнозирование вектора движения для компенсации движения множественных изображений с помощью эталона".
Область техники
Настоящее изобретение относится к видеокодированию и, более конкретно, к способам и устройствам для обеспечения улучшенного кодирования и/или способов прогнозирования, связанным с различными типами видеоданных.
Предшествующий уровень техники
Стремление к увеличенной эффективности кодирования в процессе видеокодирования привело к принятию в группе стандартов JVT (Joint Video Team - объединенная группа по обработке видеоданных) более сложных моделей и режимов, описывающих информацию движения заданного макроблока. Указанные модели и режимы нацелены на использование преимуществ временной избыточности, которая может существовать в видеопоследовательности. См., например: ITU-T, Video Coding Expert Group (VCEG), "JVT Coding - (ITU-T H.26L & ISO/IEC JTC1 Standard) - Working Draft Number 2 (WD-2)", ITU-T JVT-B118, Mar. 2002; и/или: Heiko Schwarz и Thomas Wiegand, "Tree-structured macroblock partition". Doc. VCEG-N17, Dec. 2001.
Существует постоянная необходимость в улучшенных способах и устройствах, которые могут поддерживать новейшие модели и режимы и также обладают возможностью введения новых моделей и режимов для обеспечения преимущества от применения улучшенных способов кодирования.
Сущность изобретения
Вышеописанные и другие задачи решаются, например, способом, предназначенным для использования кодирования видеоданных в пределах последовательности видеокадров. Способ включает идентификацию по меньшей мере части по меньшей мере одного видеокадра как двунаправлено прогнозируемого (B) изображения, и селективное кодирование В-изображения, используя по меньшей мере пространственное прогнозирование для кодирования по меньшей мере одного параметра движения, ассоциированного с В-изображением. В некоторых иллюстративных вариантах воплощения В-изображение может включать блок, макроблок, субблок, слой или другую подобную часть видеокадра. Например, когда используется часть макроблока, способ обеспечивает формирование прямого макроблока.
В некоторых дополнительных иллюстративных вариантах воплощения способ дополнительно включает применение прогнозирования вектора линейного или нелинейного движения для упомянутого В-изображения на основе по меньшей мере одного эталонного изображения, которое является по меньшей мере другой частью видеокадра. Например, в некоторых вариантах воплощения способ применяет прогнозирование вектора медианного движения, чтобы создать по меньшей мере один вектор движения.
В других иллюстративных вариантах воплощения, в дополнение к пространственному прогнозированию, способ также может обрабатывать по меньшей мере еще одну часть по меньшей мере еще одного видеокадра, чтобы дополнительно селективно кодировать В-изображение, используя временное прогнозирование для кодирования по меньшей мере одного временного параметра движения, ассоциированного с В-изображением. В некоторых случаях временное прогнозирование включает двунаправленное временное прогнозирование, например, основываясь по меньшей мере на части прогнозируемого (Р) кадра.
В некоторых других вариантах воплощения способ также селективно определяет применимое масштабирование для временного параметра движения, основанного по меньшей мере частично на временном расстоянии между видеокадром предиктора и кадром, который включает В-изображение. В некоторых вариантах воплощения информация временного расстояния кодируется, например, в заголовке или подобной ему компоновке данных, ассоциированной с кодированным В-изображением.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием конкретных вариантов его воплощения со ссылками на сопровождающие чертежи, на которых подобные компоненты и признаки обозначаются одинаковыми ссылочными позициями.
Фиг. 1 - блок-схема, показывающая иллюстративную вычислительную среду, которая подходит для использования с некоторыми вариантами воплощения настоящего изобретения,
фиг. 2 - блок-схема, показывающая иллюстративное типовое устройство, которое подходит для использования с некоторыми вариантами воплощения настоящего изобретения,
фиг. 3 - иллюстративная диаграмма, показывающая пространственное прогнозирование, ассоциированное с частями изображения согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
фиг. 4 - иллюстративная диаграмма, показывающая прямое прогнозирование в кодировании В-изображения согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
фиг. 5 - иллюстративная диаграмма, показывающая, что происходит, когда возникает изменение сцены или когда расположенный по соседству блок является внутренне кодированным согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
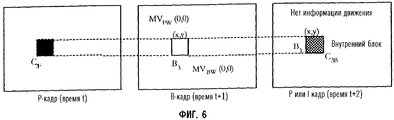
фиг. 6 - иллюстративная диаграмма, показывающая обработку расположенного рядом внутренне кодированного блока в существующих кодеках (кодерах-декодерах), где движение предполагается равным нулю согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
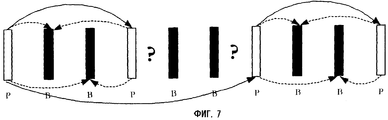
фиг. 7 иллюстративная диаграмма, показывающая обработку в прямом режиме, когда эталонное изображение расположенного рядом блока в последующем Р-изображении отличается от нуля согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
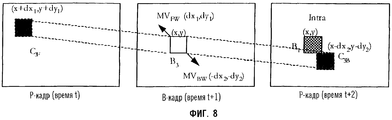
фиг. 8 - иллюстративная диаграмма, показывающая иллюстративную схему, в которой MVFW и MVBW выводятся из пространственного прогнозирования согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
фиг. 9 иллюстративная диаграмма, показывающая, как пространственное прогнозирование решает проблему изменений сцен и подобные проблемы согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
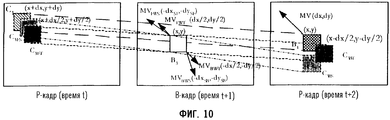
фиг. 10 - иллюстративная диаграмма, показывающая совместное пространственно-временное прогнозирование для прямого режима в кодировании В-изображения согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
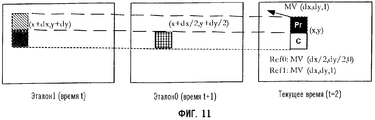
фиг. 11 - иллюстративная диаграмма, показывающая прогнозирование вектора движения текущего блока с учетом информации эталонного изображения макроблоков предиктора согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
фиг. 12 - иллюстративная диаграмма, показывающая, как использовать больше кандидатов для прогнозирования прямого режима, особенно если в пределах В-изображения используется двунаправленное прогнозирование согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
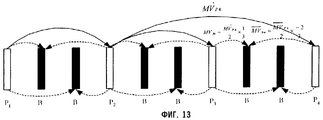
фиг. 13 - иллюстративная диаграмма, показывающая, как могут быть ограничены В-изображения при использовании последующих и предыдущих эталонных изображений согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
фиг. 14 - иллюстративная диаграмма, показывающая проекцию расположенных рядом векторов движения на текущий эталон для прямого временного прогнозирования согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
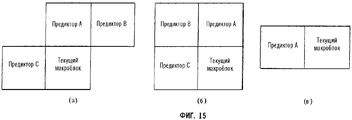
фиг. 15 а-в - иллюстративные диаграммы, показывающие предикторы вектора движения для одного MV в различных конфигурациях согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
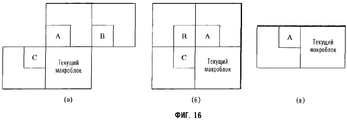
фиг. 16 а-в - иллюстративные диаграммы, показывающие предикторы вектора движения для одного MV с 8х8 разделами в различных конфигурациях согласно некоторым иллюстративным вариантам воплощения настоящего изобретения,
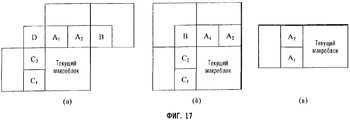
фиг. 17 а-в - иллюстративные диаграммы, показывающие предикторы вектора движения для одного MV с дополнительными предикторами для разбиения 8х8 согласно некоторым иллюстративным вариантам воплощения настоящего изобретения.
Подробное описание предпочтительных вариантов воплощения
Ниже описывается и иллюстрируется сопровождающими чертежами несколько усовершенствований для использования с двунаправлено прогнозируемыми (B) изображениями в пределах видеопоследовательности. В некоторых усовершенствованиях кодирование в прямом режиме и прогнозирование вектора движения улучшается с использованием методов пространственного прогнозирования. В других усовершенствованиях, для более точного прогнозирования, прогнозирование вектора движения включает, например, информацию временного расстояния и субблока. Указанные, а также и другие представленные здесь усовершенствования значительно улучшают характеристики любой применимой системы и логики видеокодирования.
Тогда как в настоящем изобретении описываются эти и другие иллюстративные способы и устройства, следует иметь в виду, что методы настоящего изобретения не ограничиваются описанными и показанными на чертежах примерами, очевидно, что они также могут быть приспособлены к другим подобным существующим и будущим схемам видеокодирования, и т.д.
Перед описанием указанных иллюстративных способов и устройств в следующем разделе представлены подходящие иллюстративные операционные среды, например, в виде вычислительного устройства и других типов устройств/приспособлений.
Иллюстративные операционные среды
Изобретение описано ниже со ссылками на чертежи, где одинаковые ссылочные позиции обозначают сходные элементы, как воплощенное в подходящей вычислительной среде. Хотя этого и не требуется, изобретение будет описано в общем контексте выполняемых компьютером инструкций, таких как программные модули, выполняемые персональным компьютером.
Вообще говоря, программные модули включают процедуры, программы, объекты, компоненты, структуры данных и т.д., которые исполняют отдельные задачи или реализуют конкретные абстрактные типы данных. Специалистам должно быть понятно, что изобретение может быть на практике реализовано с другими конфигурациями компьютерных систем, включая портативные устройства, мультипроцессорные системы, основанные на микропроцессорах или программируемые устройства бытовой электроники, сетевые ПК, миникомпьютеры, мэйнфреймы, портативные устройства связи и т.п.
Изобретение также может быть на практике реализовано в распределенных вычислительных средах, где задачи выполняются удаленными устройствами обработки, которые связаны через коммуникационную сеть. В распределенной вычислительной среде программные модули могут быть локализованы в локальных или удаленных устройствах памяти.
Фиг. 1 иллюстрирует пример подходящей вычислительной среды 120, в которой могут быть осуществлены описанные ниже системы, устройства и способы. Иллюстративная вычислительная среда 120 является только примером подходящей вычислительной среды и не предполагает никаких ограничений относительно области использования или функциональных возможностей описанных здесь улучшенных способов и систем. Вычислительную среду 120 не следует интерпретировать как имеющую какую-либо зависимость или требования, относящиеся к какому-либо компоненту или их комбинации, иллюстрируемым в вычислительной среде 120.
Описанные здесь улучшенные способы и системы действуют с многочисленными другими универсальными или специализированными средами или конфигурациями вычислительных систем. Примеры хорошо известных вычислительных систем, сред и/или конфигураций, которые могут быть подходящими, включают: персональные компьютеры, компьютеры-серверы, "тонких клиентов", "толстых клиентов", карманные или компактные портативные компьютеры, мультипроцессорные системы, микропроцессорные системы, телеприставки, программируемую бытовую электронику, сетевые ПК, мини-компьютеры, мэйнфреймы, распределенные вычислительные среды, которые включают любую из вышеупомянутых систем или устройств, и т.п., но не ограничиваются ими.
Как показано на фиг. 1, вычислительная среда 120 включает вычислительное устройство общего назначения в виде компьютера 130. Компоненты компьютера 130 могут включать один или более процессоров или процессорных модулей 132, системную память 134 и шину 136, которая связывает различные компоненты системы, включая системную память 134, с процессором 132.
Шина 136 представляет собой одну или несколько типов шинных структур, включая шину памяти и контроллер памяти, периферийную шину, ускоренный графический порт и процессор или локальную шину с использованием любой из множества разнообразных шинных архитектур. Например, такие архитектуры включают шину стандартной промышленной архитектуры (ISA), шину микроканальной архитектуры (MCA), шину усовершенствованной стандартной промышленной архитектуры (EISA), локальную шину Ассоциации по стандартам в области видеоэлектроники (VESA) и шину взаимодействия периферийных компонентов (PCI), также известную как шина расширения.
Компьютер 130 обычно включает множество считываемых компьютером носителей. Такие носители могут быть любыми доступными носителями, к которым может иметь доступ компьютер 130, и они включают как энергозависимые, так и энергонезависимые носители, сменные и не сменные носители.
На фиг. 1 системная память 134 включает считываемые компьютером носители в форме энергозависимой памяти, такой как запоминающее устройство с произвольной выборкой (RAM, ЗУПВ) 140, и/или в форме энергонезависимой памяти, такой как постоянное запоминающее устройство (ROM, ПЗУ) 138. Базовая система ввода-вывода (BIOS) 142, содержащая базовые процедуры, которые способствуют переносу информации между элементами внутри компьютера 130, как, например, во время запуска, сохраняется в ПЗУ 138. ЗУПВ 140 обычно содержит данные и/или программные модули, которые являются мгновенно доступными для процессора 132 и/или с которыми он работает в настоящее время.
Компьютер 130 может дополнительно включать другие сменные/несменные, энергозависимые/энергонезависимые компьютерные носители данных. Например, фиг. 1 иллюстрирует дисковод 144 жестких дисков, предназначенный для считывания и записи на несменных энергонезависимых магнитных носителях (не показан и обычно называется "жесткий диск"), дисковод 146 магнитных дисков, предназначенный для считывания и записи на сменных энергонезависимых магнитных дисках 148 (например, "дискета"), и дисковод 150 оптических дисков, предназначенный для считывания и записи на сменных, энергонезависимых оптических дисках 152, таких как CD-ROM/R/RW, DVD-ROM/R/RW/+R/RAM или же других оптических носителях. Дисковод 144 жестких дисков, дисковод 146 магнитных дисков и дисковод 150 оптических дисков присоединяются к шине 136 одним или более интерфейсами 154.
Дисководы и связанные с ними считываемые компьютером носители обеспечивают энергонезависимое сохранение считываемых компьютером инструкций, структур данных, программных модулей и других данных для компьютера 130. Хотя описанная здесь иллюстративная среда использует жесткий диск, сменный магнитный диск 148 и сменный оптический диск 152, специалистам должно быть понятно, что в иллюстративной операционной среде также можно использовать другие типы считываемых компьютером носителей, которые могут сохранять данные, доступные для компьютера, например такие, как магнитные кассеты, миниатюрные карты флэш-памяти, цифровые видеодиски, устройства ЗУПВ, ПЗУ и им подобные.
Ряд программных модулей может сохраняться на жестком диске, магнитном диске 148, оптическом диске 152, ПЗУ 138 или ЗУПВ 140, включая, например, операционную систему 158, одну или более прикладных программ 160, другие программные модули 162 и данные 164 программы.
Улучшенные описанные здесь способы и системы могут быть воплощены в операционной системе 158, одной или более прикладных программах 160, других программных модулях 162 и/или данных 164 программы.
Пользователь может вводить команды и инструкции в компьютер 130 через устройства ввода, такие как клавиатура 166 и позиционирующее устройство 168 (такое как "мышь"). Другие устройства ввода (не показаны) могут включать микрофон, джойстик, игровую приставку, спутниковую антенну, последовательный порт, сканер, камеру и т.д. Эти и другие устройства ввода подключаются к процессорному модулю 132 через интерфейс 170 пользовательского ввода, который связан с шиной 136, но также может быть соединен другими интерфейсом или структурами шин, такими как параллельный порт, игровой порт или универсальная шина последовательного обмена данными (USB).
Монитор 172 или устройство отображения другого типа также может быть связано с шиной 136 через интерфейс, такой как видеоадаптер 174. В дополнение к монитору 172, персональные компьютеры обычно включают другие периферийные устройства вывода (не показаны), такие как громкоговорители и принтеры, которые могут быть соединены через интерфейс 175 периферийных устройств вывода.
Компьютер 130 может работать в сетевой среде с использованием логических соединений с одним или несколькими удаленными компьютерами, такими как удаленный компьютер 182. Удаленный компьютер 182 может включать многие или все элементы и особенности, описанные здесь относительно компьютера 130.
Логические соединения, показанные на фиг. 1, представляют собой локальную сеть (LAN, ЛС) 177 и глобальную сеть (WAN, ГС) 179. Такие сетевые среды обычно находятся в офисах, в компьютерных сетях масштаба предприятия, в интрасетях и в сети Интернет.
При использовании в сетевой среде локальной сети компьютер 130 подключается к ЛС 177 через сетевой интерфейс или адаптер 186. При использовании в сетевой среде глобальной сети компьютер обычно содержит модем 178 или другое средство для установления связи по ГС 179. Модем 178, который может быть внутренним или внешним, может быть соединен с системной шиной 136 через пользовательский входной интерфейс 170 или другой подходящий механизм.
На фиг. 1 изображен конкретный вариант воплощения ГС через сеть Интернет. Здесь, для установления связи по меньшей мере с одним удаленным компьютером 182 через сеть Интернет, компьютер 130 использует модем 178.
В сетевой среде программные модули, показанные относительно компьютера 130 или его компонентов, могут запоминаться в удаленном запоминающем устройстве. Таким образом, например, как изображено на фиг. 1, удаленные прикладные программы 189 могут находиться в запоминающем устройстве удаленного компьютера 182. Должно быть понятно, что показанные и описанные сетевые соединения являются иллюстративными и что для установления линии связи могут быть использованы другие средства.
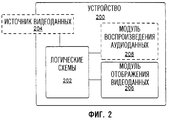
На фиг. 2 показана блок-схема иллюстративного устройства 200, которое также обеспечивает преимущества описанных здесь способов и устройства. Устройство 200 представляет любое одно или несколько устройств или приспособлений, которые оперативно конфигурируются для обработки видеоданных и/или других связанных типов данных согласно всем или части описанных здесь способов и устройств и их эквивалентов. Таким образом, устройство 200 может принимать форму вычислительного устройства по фиг. 1 или некоторую другую форму, такую как, например, беспроводное устройство, портативное устройство связи, персональный цифровой ассистент, видеоплеер, телевизор, DVD (цифровой универсальный диск) плеер, CD плеер, система караоке, телефонная будка, цифровой видеопроектор, плоский видеодисплей, телевизионная приставка, игровой видеоавтомат и т.д. В указанном примере устройство 200 включает логическую систему 202, конфигурированную для обработки видеоданных, источник 204 видеоданных, конфигурированный для ввода видеоданных в логическую систему 202, и по меньшей мере один модуль 206 отображения, имеющий возможность отображения по меньшей мере части видеоданных для просмотра пользователем. Логика 202 представляет собой аппаратные средства, программируемое оборудование, программное обеспечение и/или любую их комбинацию. В некоторых вариантах воплощения, например, логика 202 включает систему сжатия/декомпрессии (кодек) и т.д. Источник 204 видеоданных представляет любое устройство, которое может обеспечить, передать, вывести и/или по меньшей мере мгновенно сохранить видеоданные, пригодные для обработки логикой 202. Источник воспроизведения видеоданных иллюстративно показан как находящийся в устройстве 200 или вне его. Модуль 206 отображения видеоданных представляет любое устройство, которое пользователь может просматривать прямо или косвенно для наблюдения на нем визуальных результатов представленных видеоданных. Дополнительно в некоторых вариантах воплощения устройство 200 может также включать некоторые средства для воспроизведения или другой обработки аудиоданных, ассоциированных с видеоданными, в связи с чем показан модуль 208 воспроизведения аудиоданных.
Принимая во внимание примеры по фиг. 1 и 2, а также и другие, подобные им, в следующих разделах представлены иллюстративные способы и устройства, которые могут быть по меньшей мере частично реализованы на практике с использованием подобных сред и подобных устройств.
Кодирование двунаправлено прогнозируемых (B) изображений и прогнозирование вектора движения
Данный раздел описывает иллюстративные усовершенствования, которые могут быть реализованы для кодирования двунаправлено прогнозируемых (B) изображений и прогнозирования вектора движения в системе видеокодирования или подобных ей системах. Иллюстративные способы и устройства могут быть применены для прогнозирования векторов движения и усовершенствований в проектировании прямого режима обработки B-изображения. Такие способы и устройства особенно подходят для кодеков эталонов множественных изображений, например стандартов JVT, и могут достигать значительного выигрыша за счет кодирования, особенно для последовательностей панорамирования или смены сцен.
Двунаправлено прогнозируемые (B) изображения являются важной частью большинства стандартов и систем видеокодирования, поскольку они имеют тенденцию к повышению эффективности кодирования таких систем, например, по сравнению с использованием только прогнозируемых (P) изображений. Улучшение эффективности кодирования в основном достигается с учетом компенсации двунаправленного движения, что может значительно улучшить прогнозирование компенсированного движения и, таким образом, обеспечивает возможность кодирования информации со значительно сниженным остатком. Более того, введение режима прямого прогнозирования для макроблока/блока в пределах таких изображений может еще более значительно повысить эффективность (например, более чем на 10-20%), так как не кодируется информация движения. Указанную операцию можно выполнить, например, за счет обеспечения прогнозирования информации как прямого, так и обратного движения, непосредственно выводимой из векторов движения, используемых в соответствующем макроблоке последующего эталонного изображения.
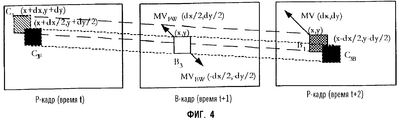
Например, фиг. 4 иллюстрирует прямое прогнозирование в кодировании В-изображения в момент времени t+1 на основе Р кадров в моменты времени t и t+2, и применимых векторов движения (MVs). Здесь делается предположение, что объект в изображении движется с постоянной скоростью. Это позволяет прогнозировать текущее положение внутри В-изображения, не требуя передачи никаких векторов движения. Векторы движения ( ) прямого режима в зависимости от вектора движения
) прямого режима в зависимости от вектора движения  , расположенного рядом с макроблоком в первом последующем эталонном Р-изображении, вычисляются по формуле
, расположенного рядом с макроблоком в первом последующем эталонном Р-изображении, вычисляются по формуле

где TR B - временное расстояние между текущим В-изображением и эталонным изображением, указанным прямым вектором движения MV расположенного рядом макроблока, а TR D - временное расстояние между последующим эталонным изображением и эталонным изображением, указанным прямым вектором движения MV расположенного рядом макроблока.
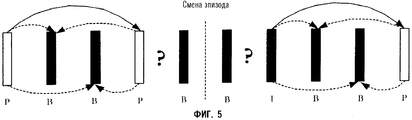
К сожалению, имеются отдельные случаи, в которых существующий прямой режим не обеспечивает адекватного решения, таким образом неэффективно используя свойства указанного режима. В частности, существующие схемы данного режима обычно приводят к тому, что параметры движения прямого макроблока равны нулю, если расположенный рядом макроблок в последующем Р-изображении является внутренне кодированным. Для данного случая это по существу означает, что макроблок В-изображения будет кодироваться как среднее двух расположенных рядом макроблоков в первом последующем и предыдущем Р-эталонах. Отсюда немедленно вытекает следующее: если макроблок является внутренне кодированным, то как можно узнать, в какой степени он связан с расположенным рядом макроблоком его эталонного изображения. В некоторых ситуациях может иметь место незначительная связь или такая связь вообще может отсутствовать. Следовательно, возможно, что эффективность кодирования прямого режима может быть снижена. Крайний случай может иметь место при смене сцен, как иллюстрируется на фиг. 5. Фиг. 5 иллюстрирует, что случается, когда происходит смена сцен в видеопоследовательности и/или что случается, когда расположенный рядом блок является внутренне кодированным. Здесь, в данном примере, очевидно отсутствие связи между двумя эталонными изображениями при наличии смены сцен. В таком случае двунаправленное прогнозирование могло бы дать незначительные преимущества или вообще не имело бы преимуществ. Как таковой прямой режим мог бы полностью оказаться бесполезным. К сожалению, известные воплощения прямого режима ограничивают его так, чтобы он всегда выполнял двунаправленное прогнозирование макроблока.
Фиг. 7 изображает иллюстративную диаграмму, показывающую, каким образом, в соответствии с некоторыми иллюстративными вариантами воплощения настоящего изобретения, осуществляется обработка прямого режима, когда эталонное изображение расположенного рядом блока в последующем Р-изображении отличается от нуля.
Дополнительная проблема, связанная с макроблоками прямого режима, существует, когда используется компенсация движения эталона множественного изображения. До недавнего времени, например, JVT стандарт обеспечивал информацию расстояния синхронизации (TR D и TR В), обеспечивая, таким образом, возможность правильного масштабирования параметров. Недавно это было изменено в новой версии кодека (см. например, публикацию "Joint Video Team (JVT) of ISO/IEC MPEG and ITU-T VCEG, "Joint Committee Draft (CD) of Joint Video Specification (ITU-T Rec. H.264 ISO/IEC 14496-10 AVC)", ITU-T JVT-C167, May, 2002", которая включена в настоящее описание посредством ссылки). В новой версии параметры вектора движения последующего Р-изображения должны масштабироваться равным образом для прогнозирования прямого режима, без учета информации эталонного изображения. Это могло бы привести к значительному ухудшению характеристик прямого режима, поскольку предположение постоянного движения больше не действует.
Тем не менее, даже если были доступны параметры временного расстояния, не всегда бесспорно то, что использование прямого режима так, как определено ранее, является наиболее подходящим решением. В частности, для В-изображений, которые ближе к первому прямому эталонному изображению, корреляция с тем изображением могла бы быть намного сильнее, чем с последующим эталонным изображением. Крайний пример, который мог бы содержать такие случаи, мог бы представлять собой последовательность, в которой сцена А меняется на сцену Β, и затем переходит назад к сцене А (например, как может иметь место в бюллетене новостей и т.д.). Все вышесказанное могло бы значительно ухудшить характеристики кодирования В-изображения, поскольку прямой режим не будет эффективно использоваться в процессе кодирования.
Учитывая указанные, а также другие обстоятельства, в отличие от предыдущих определений прямого режима, где использовалось только временное прогнозирование, согласно некоторым аспектам настоящего изобретения представляется новый тип макроблока, в котором рассматриваются как временное прогнозирование, так и пространственное прогнозирование. Используемые типы прогнозирования могут зависеть, например, от информации эталонного изображения для первого последующего эталонного Р-изображения.
Согласно некоторым другим аспектам настоящего изобретения также можно дополнительно значительно улучшить прогнозирование вектора движения как для Р-, так и для В-изображений, когда используются эталоны множественных изображений, учитывая временные расстояния, если они доступны.
Указанные усовершенствования воплощаются в некоторых иллюстративных способах и устройствах, как описано ниже. Способы и устройства могут достигать уменьшения скорости передачи данных при достижении подобного или лучшего качества.
Усовершенствования прямого режима
В наиболее известных системах видеокодирования прямой режим проектируется как схема двунаправленного прогнозирования, в которой параметры движения всегда прогнозируются временным способом из параметров движения в последующих P-изображениях. В данном разделе обеспечивается улучшенный метод прямого режима, в котором пространственная информация может также/альтернативно рассматриваться для таких прогнозов.
По необходимости может быть воплощен один или более следующих иллюстративных методов, например, в зависимости от сложности или спецификаций системы.
Один из методов состоит в том, чтобы реализовать пространственное прогнозирование параметров вектора движения прямого режима без учета временного прогнозирования. Пространственное прогнозирование можно выполнить, например, используя существующие методы прогнозирования вектора движения, используемые для кодирования вектора движения (как, например, медианное прогнозирование). Если используются эталоны множественных изображений, то также может рассматриваться эталонное изображение смежных блоков (даже хотя нет такого ограничения и можно было бы всегда использовать тот же эталон, например 0).
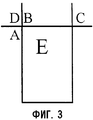
Параметры движения и эталонные изображения могли бы прогнозироваться следующим образом, со ссылкой на фиг. 3, которая иллюстрирует пространственное прогнозирование, ассоциированное с частями А-Е (например, макроблоки, слои и т.д.), в предположении, что они доступны, и частью изображения. Здесь Е прогнозируется в основном из A, B, C как медиана (A,B,C). Если С действительно находится вне изображения, то вместо него используется D. Если B, C и D находятся вне изображения, то используется только А, где, если А не существует, то заменяется точкой (0,0). Специалистам должно быть понятно, что пространственное прогнозирование также может быть выполнено на уровне субблока.
Вообще говоря, пространственное прогнозирование можно рассматривать как линейную или нелинейную функцию всей доступной информации движения, вычисленной в переделах изображения или группы макроблоков/блоков в пределах того же изображения.
Имеются различные способы, которые могут быть адаптированы для прогнозирования эталонного изображения для прямого режима. Например, один способ может состоять в том, чтобы выбирать минимальное эталонное изображение среди прогнозов. В другом способе может быть выбрано медианное эталонное изображение. В некоторых способах может быть сделан выбор между минимальным эталонным изображением и медианным эталонным изображением, например, если минимум равен нулю. В других вариантах воплощения более высокий приоритет также может быть дан либо вертикальному, либо горизонтальному предикторам (А или B) ввиду их возможно более сильной корреляции с Е.
Если одного из прогнозов не существует (например, все окружающие макроблоки прогнозируются с тем же направлением FW или BW или являются внутренними), то используется только один существующий прогноз (прогнозирование с одним направлением), или можно было бы выполнить прогнозирование из одного доступного прогноза. Например, если доступно прямое прогнозирование, то:

Временное прогнозирование используется для макроблоков, если последующий P-эталон является не внутренним, как в существующих кодеках. На фиг. 8 MVFW и MVBW выводятся из пространственного прогнозирования (медианное значение MV окружающих макроблоков). Если какой-либо прогноз не является доступным (например, нет прогнозирующего устройства), тогда используется одно направление. Если последующий P-эталон является внутренним, то пространственное прогнозирование может использоваться вместо вышеописанного. В предположении, что не существует ограничений, если один из прогнозов является недоступным, то прямой режим становится режимом прогнозирования в одном направлении.
Это могло бы обеспечить значительные преимущества при видеокодировании при изменениях сцен, например, как показано на фиг. 9 и/или даже при наличии затухания в видеопоследовательности. Как иллюстрируется на фиг. 9, пространственное прогнозирование может использоваться для решения проблемы изменения сцены.
Если информация временного расстояния не является доступной в кодеке, то временное прогнозирование будет не так эффективно в прямом режиме для блоков, когда расположенный рядом эталонный P-блок имеет ненулевое эталонное изображение. В таком случае может также использоваться пространственное прогнозирование, как описано выше. Альтернативно можно оценить параметры масштабирования, если один из окружающих макроблоков также использует то же самое эталонное изображение, что и расположенный рядом эталонный P-блок. Более того, может быть обеспечена специальная обработка для случая нулевого движения (или близкого к нулю движения) с ненулевым эталоном. Здесь, независимо от временного расстояния, векторы прямого и обратного движения всегда могли бы приниматься равными нулю. Однако наилучшее решение могло бы состоять в том, чтобы всегда проверять информацию эталонного изображения окружающих макроблоков и на его основе решать, как в таком случае следует осуществлять обработку в прямом режиме.
Более конкретно, например, задавая ненулевой эталонный сигнал, можно рассматривать следующие подслучаи:
Случай А: временное прогнозирование используется, если векторы движения расположенного рядом P-блока равны нулю.
Случай B: Если все окружающие макроблоки используют различные эталонные изображения, а не расположенный рядом P-эталон, то пространственное прогнозирование оказывается лучшим выбором, и временное прогнозирование не используется.
Случай C: Если поток движения в В-изображении оказывается достаточно отличающимся от такового в P-эталонном изображении, то вместо этого используется пространственное прогнозирование.
Случай D: О пространственном или временном прогнозировании макроблоков в прямом режиме могло бы сообщаться в заголовке изображения. Для того чтобы решить, что следует использовать, мог бы выполняться предварительный анализ изображения.
Случай E: Коррекция параметров временного прогнозирования на основе пространственной информации (или наоборот). Таким образом, например, если оказывается, что и то, и другое имеет одинаковую или приблизительно одинаковую информацию фазы, то пространственная информация могла бы быть очень хорошим кандидатом для прогнозирования в прямом режиме. Коррекция могла бы также производиться по фазе, корректируя тем самым прогнозирование с точностью до субпикселя.
Фиг. 10 иллюстрирует совместное пространственно-временное прогнозирование для прямого режима при кодировании В-изображения. Здесь, в указанном примере, прямой режим может быть режимом 1-4-х направленным в зависимости от доступной информации. Вместо использования двунаправленного прогнозирования для макроблоков прямого режима может быть выполнено многогипотезное расширение такого режима, а также могут использоваться множественные прогнозы.
С учетом приведенного выше макроблоки прямого режима могут прогнозироваться с использованием от одного до четырех возможных векторов движения в зависимости от доступной информации. Указанная задача может быть решена, например, на основе режима расположенного рядом макроблока P-эталонного изображения и на основе окружающих макроблоков в текущем В-изображении. В таком случае, если пространственное прогнозирование слишком отличается от временного, то одно из них должно быть выбрано в качестве единственного прогнозирования в пользу другого. Поскольку описанное выше пространственное прогнозирование могло бы благоприятствовать другому эталонному изображению, отличному от временного прогнозирования, такой же макроблок мог бы быть спрогнозирован из более чем 2 эталонных изображений.
JVT-стандарт не ограничивает первый последующий эталон Р-изображением. Следовательно, в таком стандарте изображение может представлять собой В-изображение, как иллюстрируется на фиг. 12, или многогипотезное (MH) изображение. Это подразумевает, что на макроблок приходится больше векторов. Последнее означает, что можно использовать указанное свойство для увеличения эффективности прямого режима посредством более эффективного использования дополнительной информации движения.
На фиг. 12 первое последующее эталонное изображение является В-изображением (изображения В8 и В9). Это позволяет использовать больше кандидатов для прогнозирования прямого режима, особенно, если в В-изображении используется двунаправленное прогнозирование.
В частности, можно выполнить следующее:
а) Если расположенный рядом эталонный блок в первом последующем эталоне использует двунаправленное прогнозирование, для вычисления векторов движения текущего блока используются соответствующие векторы движения (прямого и обратного). Поскольку вектор обратного движения эталона соответствует последующему эталонному изображению, следует особое внимание уделить оценке текущих параметров движения. Следует обратить внимание, например, на фиг. 12, на которой первое последующее эталонное изображение является В-изображением (изображения В8 и В9). Данное обстоятельство позволяет использовать больше кандидатов для прогнозирования прямого режима, особенно, если в В-изображении используется двунаправленное прогнозирование. Таким образом, как иллюстрируется, вектор обратного движения В8 и MV В8bw может быть вычислен как 2хMV В7bw вследствие временного расстояния между В8, В7 и Р6. Аналогично для В9 вектор обратного движения может быть принят как MV В7bw, если они относятся к В7. Можно также ограничить их, чтобы они относились к первому последующему Р-изображению, в данном случае указанные векторы движения могут соответственно масштабироваться. Подобный вывод можно сделать о векторах прямого движения. Эталоны множественных изображений или внутренних макроблоков могут обрабатываться подобно тому, как изложено выше.
б) Если используется двунаправленное прогнозирование для расположенного рядом блока, то в данном примере можно оценить четыре возможных прогнозирования для одного макроблока для случая прямого режима, проектируя и инвертируя векторы прямого и обратного движения эталона.
в) В зависимости от временного расстояния может быть использовано селективное проектирование и инвертирование. Согласно такому решению выбирают векторы движения из эталонного изображения, которые являются более надежными для прогнозирования. Например, рассматривая иллюстрацию на фиг. 12, можно заметить, что В8 намного ближе к Р2, чем Р6. Указанное обстоятельство подразумевает, что вектор обратного движения В7 может быть не очень надежным прогнозированием. Следовательно, в таком случае векторы движения прямого режима могут вычисляться только из прямого прогнозирования В7. Однако для В9 оба вектора движения кажутся достаточно адекватными для прогнозирования и, следовательно, могут использоваться. Такие решения и информация также могут приниматься/поддерживаться в заголовке изображения. Также могут быть реализованы другие условия и правила. Например, могут рассматриваться дополнительная пространственная достоверность прогнозирования и/или фаза вектора движения. В частности, заметим, что если векторы прямого и обратного движения не имеют взаимосвязи, то вектор обратного движения мог бы быть слишком ненадежным для использования.
Эталон одиночного изображения для В-изображения.
Существует специальный случай с использованием только одного эталона изображения для В-изображения (хотя, обычно необходимы прямой и обратный эталон), независимо от того, как много эталонных изображений используется в Р-изображениях. Из наблюдений последовательностей кодирования в современном JVT кодеке, например, было замечено, что если сравнивается эталон одиночного изображения с эталоном множества изображений в случае использования В-изображений, даже хотя характеристики кодирования Р-изображения для случая множественного изображения почти всегда превосходят таковые для эталона одиночного изображения, то же самое не всегда справедливо для В-изображений.
Одной причиной указанного наблюдения является то, что заголовок эталонного изображения используется для каждого макроблока. Учитывая, что В-изображения полагаются в большей степени на информацию движения, чем Р-изображения, заголовок информации эталонного изображения снижает число битов, которые передаются для остаточной информации при заданной скорости передачи данных, что, тем самым, снижает эффективность. Довольно легкое и эффективное решение могло бы состоять в выборе эталона только одного изображения для любой компенсации прямого или обратного движения, таким образом не требуя передачи какой-либо информации эталонного изображения.
Указанный случай рассматривается со ссылками на фиг. 13 и 14. Как иллюстрируется на фиг. 13, В-изображения могут быть ограничены только одним последующим и предыдущим эталонным изображением. Таким образом, для вычисления вектора движения прямого режима необходима проекция векторов движения. Проекция расположенных рядом векторов MV на текущий эталон для временного прямого прогнозирования иллюстрируется на фиг. 14 (заметим, что возможно, что TDD,0>TDD,1). Таким образом, в данном примере параметры движения прямого режима вычисляются посредством проектирования векторов движения, относящихся к другим эталонным изображениям, на два эталонных изображения или посредством использования пространственного прогнозирования, как на фиг. 13. Заметим, что такие опции не только обеспечивают возможность для уменьшенной сложности кодирования В-изображений, но также имеют тенденцию снижать требования к памяти, поскольку требуется запоминать несколько меньше В-изображений (например, максимум два), если В-изображения берутся в качестве эталонных В-изображений.
В некоторых случаях эталонное изображение первого последующего эталонного изображения больше не может быть доступным в буфере эталона. Указанное обстоятельство может сразу породить проблему оценки макроблоков прямого режима, и требуется специальное обращение с подобными случаями. Очевидно, такой проблемы нет, если используется эталон одиночного изображения. Однако, если желательны эталоны множественных изображений, то возможные решения включают проектирование векторов движения либо на первое прямое эталонное изображение, либо на эталонное изображение, которое является ближайшим к недоступному изображению. Любое решение могло бы быть жизнеспособным, хотя альтернативным решением опять могло бы быть пространственное прогнозирование.
Уточнения прогнозирования вектора движения для компенсации движения с эталоном одиночного и множественных изображений.
Прогнозирование вектора движения для компенсации движения с эталоном множественных изображений может значительно влиять на характеристики кодирования и В-, и Р-изображений. Существующие стандарты, такие, как например, JVT, не всегда рассматривают эталонные изображения макроблоков, используемых в прогнозировании. Единственно, что учитывается такими стандартами, это когда только один из макроблоков прогнозирования использует тот же самый эталон. В таком случае для прогнозирования движения используется только указанный предиктор. Эталонное изображение не учитывается, если один или все предикторы используют отличающийся эталон.
В таком случае, например, согласно некоторым дополнительным аспектам настоящего изобретения, можно масштабировать предикторы в соответствии с их временным расстоянием относительно текущего эталона. На фиг. 11 иллюстрируется прогнозирование вектора движения текущего блока (С) с учетом информации эталонного изображения макроблоков прогнозирования (Pr) и характеристик соответствующих настроек (например, масштабирования предикторов).
Если предикторы A, B и C используют эталонные изображения с временными расстояниями TR A, TR В и TR C соответственно и текущее эталонное изображение имеет временное расстояние, равное TR, то медианный предиктор вычисляется следующим образом:

Если должно использоваться целочисленное вычисление, то может быть проще поместить операцию умножения внутри функции медианы, повышая, таким образом, точность. Деление также можно заменить сдвигом, но это снижает характеристики, в то время как может оказаться необходимым также обработка сдвига со знаком (-1»N=-1). Таким образом, очень важно в подобных случаях иметь информацию временного расстояния, доступную для выполнения надлежащего масштабирования. Она может быть доступной в заголовке, если не прогнозируется иным образом.
Описанное выше прогнозирование вектора движения является в целом смещенным по медиане, что означает, что для прогнозирования выбирается медианное значение из набора предикторов. Если используется только один тип макроблока (например, 16х16) с одним вектором движения (MV), то предикторы могут быть заданы, например, как иллюстрируется на фиг. 15. Здесь предикторы MV изображены для одного MV. На фиг. 15а MB находится не в первой строке или последнем столбце. На фиг. 15б MB находится в последнем столбце. На фиг. 15в MB находится в первой строке.
Стандарт JVT улучшает данную ситуацию за счет учета случая, когда существует только один из трех предикторов (то есть макроблоки находятся внутри или используют отличающееся эталонное изображение в случае прогнозирования множественных изображений). В таком случае для прогнозирования используется только существующий или тот же самый эталонный предиктор, и все другие не проверяются.
Внутренне кодирование не всегда подразумевает, что появился новый объект, или изменилась сцена. Вместо этого может, например, иметь место случай, когда оценка и компенсация движения являются не адекватными для представления текущего объекта (например, диапазон поиска, используемый алгоритм оценки движения, квантование остатка и т.д.) и когда лучшие результаты могут быть достигнуты через внутреннее кодирование. Доступные предикторы могут быть еще достаточно адекватными для обеспечения хорошего решения для предиктора вектора движения.
Интерес представляет учет субблоков внутри макроблока, каждому из которых присваивается различная информация движения. Например, стандарты MPEG-4 и H.263 могут иметь до четырех таких субблоков (например, размером 8х8), хотя JVT стандарт допускает до шестнадцати субблоков, имея возможность обработки при варьируемых размерах блоков (например, 4x4, 4x8, 8x4, 8x8, 8x16, 16x8, и 16x16). Кроме того, JVT стандарт дает возможность использования 8х8 внутренних субблоков, таким образом приводя к еще большему усложнению.
Общие случаи стандартов JVT и MPEG-4/H.263 (8x8 и 16x16) иллюстрируются на фиг. 16а-в предиктором, установленным для макроблока размерами 16x16, имеющим компоновку, сходную с показанной на фиг. 15а-в, соответственно. Здесь изображены предикторы вектора движения для одного вектора движения с 8x8 разделами. Хотя описанные предикторы могли бы в некоторых случаях давать приемлемые результаты, оказывается, что они не могут охватывать все возможные предсказания.
На фиг. 17а-в показаны компоновки, подобные фиг. 15а-в соответственно. Здесь на фиг. 17а-в имеются два дополнительных предиктора, которые также могут учитываться на этапе прогнозирования (С1 и А2). Если также учитываются блоки 4x4, это увеличит число возможных предикторов на четыре.
Вместо использования медианы трех предикторов A, B и C (А1, В и С2) теперь можно иметь некоторые дополнительные и, очевидно, более надежные опции. Так, например, можно наблюдать, что предикторы А1 и С2 по существу слишком близки друг к другу, и может оказаться, что они являются не слишком репрезентативными на этапе прогнозирования. Вместо этого более надежным решением представляется выбор предикторов А1, В и С1 благодаря их разнесению. Альтернативным может быть выбор значения А2 вместо А1, но они опять могут быть слишком близки к предиктору B. Моделирование предполагает, что первый случай обычно является лучшим выбором. Для последнего столбца вместо А1 можно использовать А2. Для первой строки можно использовать либо одно из значений А2 и А1, либо даже их среднее значение. Данная реализация в рамках стандарта JVT обеспечила получение выигрыша до 1%.
Предыдущий случай добавляет некоторые критерии для последнего столбца. Анализируя, например, фиг. 17б можно видеть, что имеется тенденция к обеспечению наилучшего доступного разделения. Таким образом, дополнительным решением может быть выбор А2, С1 и В (из верхнего левого положения). Однако это нельзя рекомендовать всегда, поскольку такая реализация может неблагоприятно повлиять на характеристики правых предикторов.
Альтернативным решением может быть использование средних значений предикторов внутри макроблока.
Затем медианное значение может быть получено следующим образом:

Для вычисления медианных значений строки/столбца медиана может быть вычислена как

Другим возможным решением может быть решение "Median5". Такое решение является, вероятно, наиболее сложным вследствие вычислений (например, может использоваться быстрая сортировка, и "кипящая" сортировка), но оно могло бы потенциально дать лучшие результаты. Если учитываются, например, блоки 4x4, то можно использовать решение "Median9":
Учитывая, что стандарт JVT допускает возможность существования внутренних субблоков во внутреннем макроблоке (например, древовидная структура макроблока), указанное обстоятельство также может приниматься во внимание при прогнозировании движения. Если субблок (например, только из макроблоков сверху или слева), который должен использоваться для прогнозирования MV, является внутренним, то вместо него можно использовать смежный субблок. Таким образом, если А1 является внутренним, а А2 - нет, то при прогнозировании А1 может быть заменен на А2. Дополнительная возможность состоит в том, чтобы заменять один пропущенный внутренний макроблок MV предиктором из верхнего левого положения. Например, на фиг. 17а, если пропущен С1, то вместо него может быть использован D.
В вышеописанных разделах были представлены различные усовершенствования прямого режима В-изображения и прогнозирования вектора движения. Показано, что пространственное прогнозирование также может быть использовано для макроблоков прямого режима; где для более точного прогнозирования при прогнозировании вектора движения должны учитываться временное расстояние и информация субблоков. Это должно значительно улучшить характеристики любой применяемой системы видеокодирования.
Заключение
Хотя в вышеприведенном описании использованы термины, которые являются специфическими для структурных признаков и/или методологических приемов, должно быть понятно, что изобретение, определенное приложенной формулой изобретения, не ограничивается описанными специфическими признаками или действиями. Скорее, специфические признаки и действия раскрыты как иллюстративные формы воплощения изобретения.
Claims (18)
1. Способ для использования при кодировании видеоданных в видеокодере, содержащий
осуществление решения прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима в В-изображении, и
сигнализацию информации решения прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима в заголовке, который включает в себя информацию заголовка для множества макроблоков в В-изображении,
при этом сигнализация упомянутой информации решения прогнозирования пространственно-временного вектора движения в заголовке передает в видеодекодер решение прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима в В-изображении.
2. Способ по п.1, в котором множество макроблоков в В-изображении находятся в слое В-изображения.
3. Способ по п.1, в котором, по меньшей мере, один макроблок прямого режима содержит множество макроблоков прямого режима.
4. Способ по п.3, в котором множество макроблоков прямого режима представляют собой макроблоки 16×16.
5. Способ по п.4, в котором каждый из макроблоков 16×16 включает в себя четыре подблока 8×8.
6. Способ по п.1, в котором решение прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима указывает прогнозирование пространственного вектора движения для, по меньшей мере, одного макроблока прямого режима, при этом способ дополнительно содержит выбор эталонного изображения для, по меньшей мере, одного макроблока прямого режима.
7. Способ по п.6, в котором выбор эталонного изображения для, по меньшей мере, одного макроблока прямого режима включает в себя выбор минимального эталонного изображения для, по меньшей мере, одного макроблока прямого режима.
8. Способ по п.1, в котором решение прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима указывает прогнозирование пространственного вектора движения для, по меньшей мере, одного макроблока прямого режима, при этом прогнозирование пространственного вектора движения включает в себя прогнозирование медианного вектора движения.
9. Способ по п.1, в котором решение прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима указывает прогнозирование временного вектора движения для, по меньшей мере, одного макроблока прямого режима, при этом способ дополнительно включает в себя выбор эталонного изображения для, по меньшей мере, одного макроблока прямого режима.
10. Способ для использования при декодировании видеоданных в видеодекодере, содержащий прием сигнализированной информации решения прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима в заголовке, который включает в себя информацию заголовка для множества макроблоков в В-изображении, и
определение решения прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима в В-изображении из сигнализированной информации решения прогнозирования пространственно-временного вектора движения в заголовке.
11. Способ по п.10, в котором множество макроблоков в В-изображении находятся в слое В-изображения.
12. Способ по п.10, в котором, по меньшей мере, один макроблок прямого режима содержит множество макроблоков прямого режима.
13. Способ по п.12, в котором множество макроблоков прямого режима представляют собой макроблоки 16×16.
14. Способ по п.13, в котором каждый из макроблоков 16×16 включает в себя четыре подблока 8×8.
15. Способ по п.10, в котором решение прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима указывает прогнозирование пространственного вектора движения для, по меньшей мере, одного макроблока прямого режима,
при этом способ дополнительно содержит выбор эталонного изображения для, по меньшей мере, одного макроблока прямого режима.
16. Способ по п.15, в котором выбор эталонного изображения для, по меньшей мере, одного макроблока прямого режима включает в себя выбор минимального эталонного изображения для, по меньшей мере, одного макроблока прямого режима.
17. Способ по п.10, в котором решение прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима указывает прогнозирование пространственного вектора движения для, по меньшей мере, одного макроблока прямого режима,
при этом прогнозирование пространственного вектора движения включает в себя прогнозирование медианного вектора движения.
18. Способ по п.10, в котором решение прогнозирования пространственно-временного вектора движения для, по меньшей мере, одного макроблока прямого режима указывает прогнозирование временного вектора движения для, по меньшей мере, одного макроблока прямого режима, при этом способ дополнительно включает в себя выбор эталонного изображения для, по меньшей мере, одного макроблока прямого режима.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US38596502P | 2002-06-03 | 2002-06-03 | |
| US60/385,965 | 2002-06-03 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2003116281A RU2003116281A (ru) | 2004-12-10 |
| RU2310231C2 true RU2310231C2 (ru) | 2007-11-10 |
Family
ID=29550205
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2003116281/09A RU2310231C2 (ru) | 2002-06-03 | 2003-06-02 | Пространственно-временное прогнозирование для двунаправлено прогнозируемых (в) изображений и прогнозирование вектора движения для компенсации движения множественных изображений с помощью эталона |
Country Status (10)
| Country | Link |
|---|---|
| US (9) | US20040001546A1 (ru) |
| EP (1) | EP1369820A3 (ru) |
| JP (1) | JP4733341B2 (ru) |
| KR (1) | KR100958499B1 (ru) |
| CN (1) | CN100455018C (ru) |
| AU (1) | AU2003204477B2 (ru) |
| BR (1) | BR0302164A (ru) |
| CA (1) | CA2430460C (ru) |
| MX (1) | MXPA03004906A (ru) |
| RU (1) | RU2310231C2 (ru) |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2528132C2 (ru) * | 2010-04-13 | 2014-09-10 | Самсунг Электроникс Ко., Лтд. | Способ кодирования видео и устройство кодирования видео с использованием блоков предсказания на основании блоков кодирования, определенных в соответствии с древовидной структурой, и способ декодирования видео и устройство декодирования видео с использованием блоков предсказания на основании блоков кодирования, определенных в соответствии с древовидной структурой |
| RU2550554C2 (ru) * | 2011-01-27 | 2015-05-10 | Квэлкомм Инкорпорейтед | Выполнение предсказания вектора движения для видеокодирования |
| RU2564252C2 (ru) * | 2011-03-09 | 2015-09-27 | Кэнон Кабусики Кайся | Кодирование и декодирование видео |
| RU2571550C2 (ru) * | 2010-04-12 | 2015-12-20 | Панасоник Интеллекчуал Проперти Корпорэйшн оф Америка | Способ пространственного прогнозирования, способ декодирования изображений и способ кодирования изображений |
| US9253499B2 (en) | 2011-09-23 | 2016-02-02 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| RU2575419C2 (ru) * | 2011-11-08 | 2016-02-20 | Электроникс Энд Телекоммьюникейшнз Рисерч Инститьют | Способ и устройство для совместного использования списка кандидатов |
| RU2577181C2 (ru) * | 2011-10-21 | 2016-03-10 | Нокиа Текнолоджиз Ой | Способ и устройство для кодирования видеосигналов |
| RU2577779C2 (ru) * | 2011-11-07 | 2016-03-20 | Квэлкомм Инкорпорейтед | Генерирование дополнительных кандидатов для слияния |
| RU2584491C2 (ru) * | 2011-10-31 | 2016-05-20 | Квэлкомм Инкорпорейтед | Произвольный доступ с усовершенствованным управлением буфером декодированных изображений (dpb) при кодировании видео |
| RU2589402C2 (ru) * | 2011-08-17 | 2016-07-10 | Кэнон Кабусики Кайся | Способ и устройство для кодирования последовательности изображений, а также способ и устройство для декодирования последовательности изображений |
| US9432680B2 (en) | 2011-06-27 | 2016-08-30 | Samsung Electronics Co., Ltd. | Method and apparatus for encoding motion information, and method and apparatus for decoding same |
| US9445120B2 (en) | 2011-04-12 | 2016-09-13 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US9456214B2 (en) | 2011-08-03 | 2016-09-27 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus, and moving picture coding and decoding apparatus |
| RU2601192C2 (ru) * | 2011-05-27 | 2016-10-27 | Сан Пэтент Траст | Способ кодирования видео, устройство кодирования видео, способ декодирования видео, устройство декодирования видео и устройство кодирования/декодирования видео |
| US9516334B2 (en) | 2011-11-08 | 2016-12-06 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US9609356B2 (en) | 2011-05-31 | 2017-03-28 | Sun Patent Trust | Moving picture coding method and apparatus with candidate motion vectors |
| US9615107B2 (en) | 2011-05-27 | 2017-04-04 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| RU2617920C2 (ru) * | 2012-04-12 | 2017-04-28 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство кодирования движущегося изображения, способ кодирования движущегося изображения и программа кодирования движущегося изображения, а также устройство декодирования движущегося изображения, способ декодирования движущегося изображения и программа декодирования движущегося изображения |
| US9826249B2 (en) | 2011-05-24 | 2017-11-21 | Velos Media, Llc | Decoding method and apparatuses with candidate motion vectors |
| US9900613B2 (en) | 2011-05-31 | 2018-02-20 | Sun Patent Trust | Image coding and decoding system using candidate motion vectors |
| US9998757B2 (en) | 2011-09-23 | 2018-06-12 | Velos Media, Llc | Reference picture signaling and decoded picture buffer management |
| RU2705428C2 (ru) * | 2015-03-27 | 2019-11-07 | Квэлкомм Инкорпорейтед | Вывод информации движения для подблоков при видеокодировании |
| RU2731026C1 (ru) * | 2011-01-07 | 2020-08-28 | Нтт Докомо, Инк. | Способ прогнозирующего кодирования, устройство прогнозирующего кодирования и программа прогнозирующего кодирования вектора движения и способ прогнозирующего декодирования, устройство прогнозирующего декодирования и программа прогнозирующего декодирования вектора движения |
| US10887585B2 (en) | 2011-06-30 | 2021-01-05 | Sun Patent Trust | Image decoding method, image coding method, image decoding apparatus, image coding apparatus, and image coding and decoding apparatus |
| US11218708B2 (en) | 2011-10-19 | 2022-01-04 | Sun Patent Trust | Picture decoding method for decoding using a merging candidate selected from a first merging candidate derived using a first derivation process and a second merging candidate derived using a second derivation process |
Families Citing this family (128)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6957350B1 (en) | 1996-01-30 | 2005-10-18 | Dolby Laboratories Licensing Corporation | Encrypted and watermarked temporal and resolution layering in advanced television |
| US8374237B2 (en) | 2001-03-02 | 2013-02-12 | Dolby Laboratories Licensing Corporation | High precision encoding and decoding of video images |
| US7266150B2 (en) | 2001-07-11 | 2007-09-04 | Dolby Laboratories, Inc. | Interpolation of video compression frames |
| US8111754B1 (en) | 2001-07-11 | 2012-02-07 | Dolby Laboratories Licensing Corporation | Interpolation of video compression frames |
| US20030112863A1 (en) | 2001-07-12 | 2003-06-19 | Demos Gary A. | Method and system for improving compressed image chroma information |
| JP4114859B2 (ja) * | 2002-01-09 | 2008-07-09 | 松下電器産業株式会社 | 動きベクトル符号化方法および動きベクトル復号化方法 |
| US7003035B2 (en) * | 2002-01-25 | 2006-02-21 | Microsoft Corporation | Video coding methods and apparatuses |
| US20040001546A1 (en) | 2002-06-03 | 2004-01-01 | Alexandros Tourapis | Spatiotemporal prediction for bidirectionally predictive (B) pictures and motion vector prediction for multi-picture reference motion compensation |
| JP2004023458A (ja) * | 2002-06-17 | 2004-01-22 | Toshiba Corp | 動画像符号化/復号化方法及び装置 |
| US7280700B2 (en) * | 2002-07-05 | 2007-10-09 | Microsoft Corporation | Optimization techniques for data compression |
| CN100566420C (zh) | 2002-07-15 | 2009-12-02 | 株式会社日立制作所 | 动态图像的编码方法 |
| US7154952B2 (en) | 2002-07-19 | 2006-12-26 | Microsoft Corporation | Timestamp-independent motion vector prediction for predictive (P) and bidirectionally predictive (B) pictures |
| KR100506864B1 (ko) * | 2002-10-04 | 2005-08-05 | 엘지전자 주식회사 | 모션벡터 결정방법 |
| EP1562385B1 (en) * | 2002-11-01 | 2014-07-02 | Panasonic Corporation | Motion picture encoding method and motion picture decoding method |
| JP4373702B2 (ja) | 2003-05-07 | 2009-11-25 | 株式会社エヌ・ティ・ティ・ドコモ | 動画像符号化装置、動画像復号化装置、動画像符号化方法、動画像復号化方法、動画像符号化プログラム及び動画像復号化プログラム |
| US7609763B2 (en) * | 2003-07-18 | 2009-10-27 | Microsoft Corporation | Advanced bi-directional predictive coding of video frames |
| US8064520B2 (en) * | 2003-09-07 | 2011-11-22 | Microsoft Corporation | Advanced bi-directional predictive coding of interlaced video |
| KR100955161B1 (ko) | 2004-05-04 | 2010-04-28 | 콸콤 인코포레이티드 | 모션 보상된 프레임 레이트 상향 변환을 위한 방법 및 장치 |
| RU2370909C2 (ru) | 2004-07-01 | 2009-10-20 | Квэлкомм Инкорпорейтед | Способ и устройство для использования способов преобразования кадров с повышением частоты кадров при кодировании масштабируемого видео |
| AR049727A1 (es) * | 2004-07-20 | 2006-08-30 | Qualcomm Inc | Metodo y aparato para la conversion ascendente de la velocidad de las tramas con multiples tramas de referencia y tamanos de bloques variables |
| CA2574297A1 (en) | 2004-07-20 | 2006-02-02 | Qualcomm Incorporated | Method and apparatus for encoder assisted-frame rate up conversion (ea-fruc) for video compression |
| US8553776B2 (en) * | 2004-07-21 | 2013-10-08 | QUALCOMM Inorporated | Method and apparatus for motion vector assignment |
| KR100584603B1 (ko) * | 2004-08-03 | 2006-05-30 | 학교법인 대양학원 | 다시점 영상의 다이렉트 모드 움직임 예측 방법 및 장치 |
| WO2006016783A1 (en) * | 2004-08-13 | 2006-02-16 | Industry Academic Cooperation Foundation Kyunghee University | Method and device for motion estimation and compensation for panorama image |
| KR100694059B1 (ko) * | 2004-09-30 | 2007-03-12 | 삼성전자주식회사 | 멀티 타임 스캔 방식에 기초한 인터 모드 인코딩 및디코딩 방법 및 장치 |
| KR100694058B1 (ko) | 2004-09-30 | 2007-03-12 | 삼성전자주식회사 | 멀티 타임 스캔 방식에 기초한 인트라 모드 인코딩 및디코딩 방법 및 장치 |
| US7751478B2 (en) * | 2005-01-21 | 2010-07-06 | Seiko Epson Corporation | Prediction intra-mode selection in an encoder |
| KR100723403B1 (ko) * | 2005-02-28 | 2007-05-30 | 삼성전자주식회사 | 컬러 성분간 단일 부호화 모드를 이용한 예측영상 생성 방법 및 장치와, 그를 이용한 영상 및 비디오 부호화/복호화방법 및 장치 |
| US7830961B2 (en) * | 2005-06-21 | 2010-11-09 | Seiko Epson Corporation | Motion estimation and inter-mode prediction |
| CN100473168C (zh) * | 2005-06-21 | 2009-03-25 | 中国科学院计算技术研究所 | 视频编码的运动矢量空间预测方法 |
| BRPI0613522B1 (pt) * | 2005-07-25 | 2019-09-17 | Interdigital Madison Patent Holdings | Método e aparelho para a detecção e ocultamento de quadros de vídeo de referência e de não-referência |
| KR100727969B1 (ko) | 2005-08-27 | 2007-06-14 | 삼성전자주식회사 | 영상의 부호화 및 복호화 장치와, 그 방법, 및 이를수행하기 위한 프로그램이 기록된 기록 매체 |
| US20070064809A1 (en) * | 2005-09-14 | 2007-03-22 | Tsuyoshi Watanabe | Coding method for coding moving images |
| US7843995B2 (en) * | 2005-12-19 | 2010-11-30 | Seiko Epson Corporation | Temporal and spatial analysis of a video macroblock |
| US8170102B2 (en) * | 2005-12-19 | 2012-05-01 | Seiko Epson Corporation | Macroblock homogeneity analysis and inter mode prediction |
| US20070171977A1 (en) * | 2006-01-25 | 2007-07-26 | Shintaro Kudo | Moving picture coding method and moving picture coding device |
| JP4527677B2 (ja) * | 2006-03-15 | 2010-08-18 | 富士通株式会社 | 動画像符号化方法、動画像符号化装置、動画像符号化プログラム |
| US8750387B2 (en) | 2006-04-04 | 2014-06-10 | Qualcomm Incorporated | Adaptive encoder-assisted frame rate up conversion |
| US8634463B2 (en) | 2006-04-04 | 2014-01-21 | Qualcomm Incorporated | Apparatus and method of enhanced frame interpolation in video compression |
| CN101422047B (zh) * | 2006-04-14 | 2011-01-12 | Nxp股份有限公司 | 图像边界处的运动估计方法及显示设备 |
| US8009732B2 (en) * | 2006-09-01 | 2011-08-30 | Seiko Epson Corporation | In-loop noise reduction within an encoder framework |
| KR101365574B1 (ko) * | 2007-01-29 | 2014-02-20 | 삼성전자주식회사 | 영상 부호화 방법 및 장치, 복호화 방법 및 장치 |
| US9031129B2 (en) * | 2007-06-15 | 2015-05-12 | Microsoft Technology Licensing, Llc | Joint spatio-temporal prediction for video coding |
| WO2008153262A1 (en) | 2007-06-15 | 2008-12-18 | Sungkyunkwan University Foundation For Corporate Collaboration | Bi-prediction coding method and apparatus, bi-prediction decoding method and apparatus, and recording midium |
| US8526499B2 (en) * | 2007-06-15 | 2013-09-03 | Sungkyunkwan University Foundation For Corporate Collaboration | Bi-prediction coding method and apparatus, bi-prediction decoding method and apparatus, and recording medium |
| US8254455B2 (en) * | 2007-06-30 | 2012-08-28 | Microsoft Corporation | Computing collocated macroblock information for direct mode macroblocks |
| KR101396365B1 (ko) | 2007-08-28 | 2014-05-30 | 삼성전자주식회사 | 영상의 시공간적 움직임 추정/보상 방법 및 장치 |
| FR2923125B1 (fr) * | 2007-10-29 | 2010-10-22 | Assistance Tech Et Etude De Ma | Procede et systeme d'estimation de mouvement futur d'elements d'image a partir du mouvement passe dans un codeur video |
| US8687693B2 (en) | 2007-11-30 | 2014-04-01 | Dolby Laboratories Licensing Corporation | Temporal image prediction |
| KR100939917B1 (ko) | 2008-03-07 | 2010-02-03 | 에스케이 텔레콤주식회사 | 움직임 예측을 통한 부호화 시스템 및 움직임 예측을 통한부호화 방법 |
| EP2266318B1 (en) | 2008-03-19 | 2020-04-22 | Nokia Technologies Oy | Combined motion vector and reference index prediction for video coding |
| JP5452584B2 (ja) * | 2008-04-11 | 2014-03-26 | トムソン ライセンシング | ビデオ符号化及び復号化におけるテンプレート・マッチング予測(tmp)のための方法及び装置 |
| CN102113326A (zh) | 2008-08-04 | 2011-06-29 | 杜比实验室特许公司 | 重叠块差异估计和补偿体系结构 |
| US8189666B2 (en) | 2009-02-02 | 2012-05-29 | Microsoft Corporation | Local picture identifier and computation of co-located information |
| US9060176B2 (en) * | 2009-10-01 | 2015-06-16 | Ntt Docomo, Inc. | Motion vector prediction in video coding |
| JP2011091696A (ja) * | 2009-10-23 | 2011-05-06 | Victor Co Of Japan Ltd | 動きベクトル予測方法 |
| US9036692B2 (en) | 2010-01-18 | 2015-05-19 | Mediatek Inc. | Motion prediction method |
| US9351017B2 (en) | 2010-01-19 | 2016-05-24 | Samsung Electronics Co., Ltd. | Method and apparatus for encoding/decoding images using a motion vector of a previous block as a motion vector for the current block |
| JP2013517733A (ja) * | 2010-01-19 | 2013-05-16 | サムスン エレクトロニクス カンパニー リミテッド | 以前ブロックの動きベクトルを現在ブロックの動きベクトルとして用いる映像符号化/復号化方法及び装置 |
| JP5649701B2 (ja) * | 2010-04-08 | 2015-01-07 | 株式会社東芝 | 画像復号化方法、装置、及びプログラム |
| WO2011125211A1 (ja) * | 2010-04-08 | 2011-10-13 | 株式会社 東芝 | 画像符号化方法及び画像復号化方法 |
| CN103227922B (zh) * | 2010-04-08 | 2016-06-01 | 株式会社东芝 | 图像解码方法以及图像解码装置 |
| JP5367161B2 (ja) * | 2010-04-08 | 2013-12-11 | 株式会社東芝 | 画像符号化方法、装置、及びプログラム |
| EP2559243B1 (en) * | 2010-04-13 | 2014-08-27 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | A video decoder and a video encoder using motion-compensated prediction |
| US8837592B2 (en) * | 2010-04-14 | 2014-09-16 | Mediatek Inc. | Method for performing local motion vector derivation during video coding of a coding unit, and associated apparatus |
| JP5625512B2 (ja) * | 2010-06-09 | 2014-11-19 | ソニー株式会社 | 符号化装置、符号化方法、プログラム、および記録媒体 |
| TWI426785B (zh) * | 2010-09-17 | 2014-02-11 | Univ Nat Cheng Kung | 於可調式影像解碼的全畫面錯誤掩蓋方法 |
| US10104391B2 (en) | 2010-10-01 | 2018-10-16 | Dolby International Ab | System for nested entropy encoding |
| US20120082228A1 (en) * | 2010-10-01 | 2012-04-05 | Yeping Su | Nested entropy encoding |
| CN105338364B (zh) * | 2010-10-06 | 2018-07-24 | 株式会社Ntt都科摩 | 图像预测解码装置、图像预测解码方法 |
| KR101526778B1 (ko) * | 2010-10-08 | 2015-06-05 | 프라운호퍼 게젤샤프트 쭈르 푀르데룽 데어 안겐반텐 포르슝 에. 베. | 블록 분할 및 블록 병합을 지원하는 픽처 코딩 |
| KR101950419B1 (ko) * | 2010-11-24 | 2019-02-21 | 벨로스 미디어 인터내셔널 리미티드 | 움직임 벡터 산출 방법, 화상 부호화 방법, 화상 복호 방법, 움직임 벡터 산출 장치 및 화상 부호화 복호 장치 |
| KR102209693B1 (ko) * | 2011-02-09 | 2021-01-29 | 엘지전자 주식회사 | 영상 부호화 및 복호화 방법과 이를 이용한 장치 |
| JP5747559B2 (ja) * | 2011-03-01 | 2015-07-15 | 富士通株式会社 | 動画像復号方法、動画像符号化方法、動画像復号装置、及び動画像復号プログラム |
| JP5786478B2 (ja) | 2011-06-15 | 2015-09-30 | 富士通株式会社 | 動画像復号装置、動画像復号方法、及び動画像復号プログラム |
| AU2014210568B2 (en) * | 2011-06-15 | 2015-10-01 | Fujitsu Limited | Video decoding apparatus, video coding apparatus, video decoding method, video coding method, and storage medium |
| WO2013006386A1 (en) * | 2011-07-01 | 2013-01-10 | General Instrument Corporation | Motion vector prediction design simplification |
| US20130070855A1 (en) * | 2011-09-17 | 2013-03-21 | Qualcomm Incorporated | Hybrid motion vector coding modes for video coding |
| CN104041041B (zh) | 2011-11-04 | 2017-09-01 | 谷歌技术控股有限责任公司 | 用于非均匀运动向量栅格的运动向量缩放 |
| KR102070431B1 (ko) | 2012-01-19 | 2020-01-28 | 삼성전자주식회사 | 쌍방향 예측 및 블록 병합을 제한하는 비디오 부호화 방법 및 장치, 비디오 복호화 방법 및 장치 |
| WO2013108616A1 (en) | 2012-01-20 | 2013-07-25 | Panasonic Corporation | Methods and apparatuses for encoding and decoding video using temporal motion vector prediction |
| EP3829177A1 (en) | 2012-02-03 | 2021-06-02 | Sun Patent Trust | Image coding method, image decoding method, image coding apparatus, image decoding apparatus, and image coding and decoding apparatus |
| CA2866121C (en) | 2012-03-06 | 2018-04-24 | Panasonic Intellectual Property Corporation Of America | Moving picture coding method, moving picture decoding method, moving picture coding apparatus, moving picture decoding apparatus, and moving picture coding and decoding apparatus |
| US11317101B2 (en) | 2012-06-12 | 2022-04-26 | Google Inc. | Inter frame candidate selection for a video encoder |
| US9503746B2 (en) | 2012-10-08 | 2016-11-22 | Google Inc. | Determine reference motion vectors |
| US9485515B2 (en) | 2013-08-23 | 2016-11-01 | Google Inc. | Video coding using reference motion vectors |
| US9942063B2 (en) | 2012-10-26 | 2018-04-10 | Altera Corporation | Apparatus for improved encoding and associated methods |
| US9490836B2 (en) * | 2012-10-26 | 2016-11-08 | Altera Corporation | Apparatus for improved encoding and associated methods |
| WO2014120367A1 (en) | 2013-01-30 | 2014-08-07 | Intel Corporation | Content adaptive parametric transforms for coding for next generation video |
| FR3002716A1 (fr) | 2013-02-26 | 2014-08-29 | France Telecom | Derivation de vecteur de mouvement de disparite, codage et decodage video 3d utilisant une telle derivation |
| WO2014146079A1 (en) | 2013-03-15 | 2014-09-18 | Zenkich Raymond | System and method for non-uniform video coding |
| KR101560186B1 (ko) * | 2013-03-18 | 2015-10-14 | 삼성전자주식회사 | 움직임 예측에 있어 적응적 탐색 범위 결정을 이용한 부호화, 복호화 방법 및 장치 |
| CN105594214B (zh) * | 2013-04-12 | 2019-11-26 | 联发科技股份有限公司 | 在三维编码系统中深度区块的帧内编码方法及装置 |
| WO2014166116A1 (en) * | 2013-04-12 | 2014-10-16 | Mediatek Inc. | Direct simplified depth coding |
| WO2014190468A1 (en) | 2013-05-27 | 2014-12-04 | Microsoft Corporation | Video encoder for images |
| JP5571229B2 (ja) * | 2013-06-03 | 2014-08-13 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP5444497B2 (ja) * | 2013-09-11 | 2014-03-19 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP5479648B1 (ja) * | 2013-12-10 | 2014-04-23 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| KR101789954B1 (ko) * | 2013-12-27 | 2017-10-25 | 인텔 코포레이션 | 차세대 비디오 코딩을 위한 콘텐츠 적응적 이득 보상된 예측 |
| JP2014131295A (ja) * | 2014-01-23 | 2014-07-10 | Toshiba Corp | 画像符号化方法及び画像復号化方法 |
| JP5571262B2 (ja) * | 2014-01-23 | 2014-08-13 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP5509398B1 (ja) * | 2014-01-23 | 2014-06-04 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP2014131293A (ja) * | 2014-01-23 | 2014-07-10 | Toshiba Corp | 画像符号化方法及び画像復号化方法 |
| WO2015139165A1 (en) | 2014-03-17 | 2015-09-24 | Microsoft Technology Licensing, Llc | Encoder-side decisions for screen content encoding |
| US9392293B2 (en) * | 2014-05-21 | 2016-07-12 | Alcatel Lucent | Accelerated image processing |
| JP5659314B1 (ja) * | 2014-10-01 | 2015-01-28 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP2015053729A (ja) * | 2014-11-17 | 2015-03-19 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| EP3254463A4 (en) | 2015-02-06 | 2018-02-21 | Microsoft Technology Licensing, LLC | Skipping evaluation stages during media encoding |
| US10038917B2 (en) | 2015-06-12 | 2018-07-31 | Microsoft Technology Licensing, Llc | Search strategies for intra-picture prediction modes |
| US10136132B2 (en) | 2015-07-21 | 2018-11-20 | Microsoft Technology Licensing, Llc | Adaptive skip or zero block detection combined with transform size decision |
| JP6196341B2 (ja) * | 2016-02-17 | 2017-09-13 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| WO2017188566A1 (ko) * | 2016-04-25 | 2017-11-02 | 엘지전자 주식회사 | 영상 코딩 시스템에서 인터 예측 방법 및 장치 |
| US10762135B2 (en) * | 2016-11-21 | 2020-09-01 | Adobe Inc. | Recommending software actions to create an image and recommending images to demonstrate the effects of software actions |
| JP6271694B2 (ja) * | 2016-12-16 | 2018-01-31 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP6370977B2 (ja) * | 2017-08-31 | 2018-08-08 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP6608904B2 (ja) * | 2017-12-05 | 2019-11-20 | 株式会社東芝 | 動画像符号化装置及び方法 |
| US20190246114A1 (en) * | 2018-02-02 | 2019-08-08 | Apple Inc. | Techniques of multi-hypothesis motion compensation |
| US11924440B2 (en) | 2018-02-05 | 2024-03-05 | Apple Inc. | Techniques of multi-hypothesis motion compensation |
| JP6609004B2 (ja) * | 2018-07-02 | 2019-11-20 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| US11665365B2 (en) * | 2018-09-14 | 2023-05-30 | Google Llc | Motion prediction coding with coframe motion vectors |
| CN113056920B (zh) | 2018-11-22 | 2024-05-24 | 北京字节跳动网络技术有限公司 | 基于子块的帧间预测的协调方法 |
| KR102230265B1 (ko) * | 2019-07-01 | 2021-03-19 | 삼성전자주식회사 | 주변 움직임 정보를 이용하여 움직임 정보를 부호화 및 복호화하는 장치, 및 방법 |
| EP3997877A4 (en) | 2019-08-13 | 2023-05-24 | Beijing Bytedance Network Technology Co., Ltd. | MOTION ACCURACY IN SUBBLOCK-BASED INTERPREDICTION |
| WO2021052504A1 (en) | 2019-09-22 | 2021-03-25 | Beijing Bytedance Network Technology Co., Ltd. | Scaling method for sub-block based inter prediction |
| JP6795666B2 (ja) * | 2019-10-21 | 2020-12-02 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP6980889B2 (ja) * | 2019-10-21 | 2021-12-15 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP7242811B2 (ja) * | 2019-10-21 | 2023-03-20 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
| JP6961781B2 (ja) * | 2019-10-21 | 2021-11-05 | 株式会社東芝 | 画像符号化方法及び画像復号化方法 |
Family Cites Families (281)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56128070A (en) * | 1980-03-13 | 1981-10-07 | Fuji Photo Film Co Ltd | Band compressing equipment of variable density picture |
| JPS60158786A (ja) | 1984-01-30 | 1985-08-20 | Kokusai Denshin Denwa Co Ltd <Kdd> | 画像動き量検出方式 |
| JPH031688Y2 (ru) | 1985-02-20 | 1991-01-18 | ||
| JPS61205086A (ja) | 1985-03-08 | 1986-09-11 | Mitsubishi Electric Corp | 画像符号化復号化装置 |
| US4661849A (en) * | 1985-06-03 | 1987-04-28 | Pictel Corporation | Method and apparatus for providing motion estimation signals for communicating image sequences |
| US4661853A (en) * | 1985-11-01 | 1987-04-28 | Rca Corporation | Interfield image motion detector for video signals |
| JPS62213494A (ja) | 1986-03-14 | 1987-09-19 | Kokusai Denshin Denwa Co Ltd <Kdd> | 動画像信号の動き補償方式 |
| FR2599577B1 (fr) * | 1986-05-29 | 1988-08-05 | Guichard Jacques | Procede de codage par transformation pour la transmission de signaux d'image. |
| DE3704777C1 (de) | 1987-02-16 | 1988-04-07 | Ant Nachrichtentech | Verfahren zum UEbertragen und zum Wiedergeben von Fernsehbildsequenzen |
| NL8700565A (nl) | 1987-03-10 | 1988-10-03 | Philips Nv | Televisiesysteem waarin aan een transformatiekodering onderworpen gedigitaliseerde beeldsignalen worden overgebracht van een kodeerstation naar een dekodeerstation. |
| EP0290085B1 (de) * | 1987-05-06 | 1996-03-20 | Philips Patentverwaltung GmbH | System zur Übertragung von Videobildern |
| DE3717057A1 (de) | 1987-05-21 | 1988-12-01 | Bayer Ag | Verfahren zur herstellung von isocyanaten |
| EP0294962B1 (en) | 1987-06-09 | 1995-07-19 | Sony Corporation | Motion vector estimation in television images |
| EP0294958B1 (en) | 1987-06-09 | 1995-08-23 | Sony Corporation | Motion compensated interpolation of digital television images |
| FR2648254B2 (fr) * | 1988-09-23 | 1991-08-30 | Thomson Csf | Procede et dispositif d'estimation de mouvement dans une sequence d'images animees |
| US4985768A (en) * | 1989-01-20 | 1991-01-15 | Victor Company Of Japan, Ltd. | Inter-frame predictive encoding system with encoded and transmitted prediction error |
| JPH07109990B2 (ja) * | 1989-04-27 | 1995-11-22 | 日本ビクター株式会社 | 適応型フレーム間予測符号化方法及び復号方法 |
| JPH0832047B2 (ja) * | 1989-04-28 | 1996-03-27 | 日本ビクター株式会社 | 予測符号化装置 |
| USRE35910E (en) | 1989-05-11 | 1998-09-29 | Matsushita Electric Industrial Co., Ltd. | Moving image signal encoding apparatus and decoding apparatus |
| AU612543B2 (en) | 1989-05-11 | 1991-07-11 | Panasonic Corporation | Moving image signal encoding apparatus and decoding apparatus |
| JP2562499B2 (ja) | 1989-05-29 | 1996-12-11 | 日本電信電話株式会社 | 高能率画像符号化装置およびその復号化装置 |
| EP0713340B1 (en) * | 1989-10-14 | 2001-08-22 | Sony Corporation | Video signal coding/decoding method and apparatus |
| JP2712645B2 (ja) | 1989-10-14 | 1998-02-16 | ソニー株式会社 | 動きベクトル伝送方法及びその装置並びに動きベクトル復号化方法及びその装置 |
| JP2787599B2 (ja) | 1989-11-06 | 1998-08-20 | 富士通株式会社 | 画像信号符号化制御方式 |
| NL9000424A (nl) | 1990-02-22 | 1991-09-16 | Philips Nv | Overdrachtsysteem voor gedigitaliseerde televisiebeelden. |
| JPH082107B2 (ja) * | 1990-03-02 | 1996-01-10 | 国際電信電話株式会社 | 動画像のハイブリッド符号化方法及びその装置 |
| JPH03265290A (ja) | 1990-03-14 | 1991-11-26 | Toshiba Corp | テレビジョン信号走査線変換器 |
| US5103306A (en) * | 1990-03-28 | 1992-04-07 | Transitions Research Corporation | Digital image compression employing a resolution gradient |
| US5091782A (en) * | 1990-04-09 | 1992-02-25 | General Instrument Corporation | Apparatus and method for adaptively compressing successive blocks of digital video |
| US5068724A (en) | 1990-06-15 | 1991-11-26 | General Instrument Corporation | Adaptive motion compensation for digital television |
| DE69131257T2 (de) | 1990-10-31 | 1999-09-23 | Victor Company Of Japan, Ltd. | Verfahren zur Kompression von bewegten Bildsignalen nach dem Zeilensprungverfahren |
| US5193004A (en) * | 1990-12-03 | 1993-03-09 | The Trustees Of Columbia University In The City Of New York | Systems and methods for coding even fields of interlaced video sequences |
| USRE35093E (en) | 1990-12-03 | 1995-11-21 | The Trustees Of Columbia University In The City Of New York | Systems and methods for coding even fields of interlaced video sequences |
| US5111292A (en) * | 1991-02-27 | 1992-05-05 | General Electric Company | Priority selection apparatus as for a video signal processor |
| JP3119888B2 (ja) * | 1991-04-18 | 2000-12-25 | 松下電器産業株式会社 | 信号処理方法及び記録再生装置 |
| US5185819A (en) * | 1991-04-29 | 1993-02-09 | General Electric Company | Video signal compression apparatus for independently compressing odd and even fields |
| HU9300005D0 (en) * | 1991-05-24 | 1993-04-28 | British Broadcasting Corp | Method for processing video picture |
| US5317397A (en) * | 1991-05-31 | 1994-05-31 | Kabushiki Kaisha Toshiba | Predictive coding using spatial-temporal filtering and plural motion vectors |
| US5467136A (en) | 1991-05-31 | 1995-11-14 | Kabushiki Kaisha Toshiba | Video decoder for determining a motion vector from a scaled vector and a difference vector |
| JP2977104B2 (ja) | 1991-07-26 | 1999-11-10 | ソニー株式会社 | 動画像データエンコード方法および装置、並びに動画像データデコード方法および装置 |
| US5539466A (en) | 1991-07-30 | 1996-07-23 | Sony Corporation | Efficient coding apparatus for picture signal and decoding apparatus therefor |
| JP2699703B2 (ja) * | 1991-07-31 | 1998-01-19 | 松下電器産業株式会社 | 動き補償予測方法とそれを用いた画像信号符号化方法 |
| JPH0541862A (ja) * | 1991-08-03 | 1993-02-19 | Sony Corp | 動きベクトルの可変長符号化方式 |
| US5428396A (en) * | 1991-08-03 | 1995-06-27 | Sony Corporation | Variable length coding/decoding method for motion vectors |
| JP3001688B2 (ja) | 1991-08-05 | 2000-01-24 | 株式会社大一商会 | パチンコ球の循環制御装置 |
| JP2507204B2 (ja) * | 1991-08-30 | 1996-06-12 | 松下電器産業株式会社 | 映像信号符号化装置 |
| EP0535746B1 (en) | 1991-09-30 | 1997-01-29 | Philips Electronics Uk Limited | Motion vector estimation, motion picture encoding and storage |
| JP2991833B2 (ja) | 1991-10-11 | 1999-12-20 | 松下電器産業株式会社 | インターレス走査ディジタルビデオ信号の符号化装置及びその方法 |
| JP2586260B2 (ja) | 1991-10-22 | 1997-02-26 | 三菱電機株式会社 | 適応的ブロッキング画像符号化装置 |
| JP3134424B2 (ja) | 1991-10-31 | 2001-02-13 | ソニー株式会社 | 可変長符号化方法及び装置 |
| JP2962012B2 (ja) | 1991-11-08 | 1999-10-12 | 日本ビクター株式会社 | 動画像符号化装置及びその復号装置 |
| JPH05137131A (ja) | 1991-11-13 | 1993-06-01 | Sony Corp | フレーム間動き予測方法 |
| US5227878A (en) | 1991-11-15 | 1993-07-13 | At&T Bell Laboratories | Adaptive coding and decoding of frames and fields of video |
| US5510840A (en) * | 1991-12-27 | 1996-04-23 | Sony Corporation | Methods and devices for encoding and decoding frame signals and recording medium therefor |
| JP2524044B2 (ja) | 1992-01-22 | 1996-08-14 | 松下電器産業株式会社 | 画像符号化方法及び画像符号化装置 |
| US5594813A (en) * | 1992-02-19 | 1997-01-14 | Integrated Information Technology, Inc. | Programmable architecture and methods for motion estimation |
| DE69322769T2 (de) | 1992-03-03 | 1999-07-22 | Kabushiki Kaisha Toshiba, Kawasaki, Kanagawa | Koder für zeitveränderliche bilder |
| US5293229A (en) * | 1992-03-27 | 1994-03-08 | Matsushita Electric Corporation Of America | Apparatus and method for processing groups of fields in a video data compression system |
| US5287420A (en) * | 1992-04-08 | 1994-02-15 | Supermac Technology | Method for image compression on a personal computer |
| KR0166716B1 (ko) | 1992-06-18 | 1999-03-20 | 강진구 | 블럭 dpcm을 이용한 부호화/복호화방법 및 장치 |
| US6226327B1 (en) | 1992-06-29 | 2001-05-01 | Sony Corporation | Video coding method and apparatus which select between frame-based and field-based predictive modes |
| US6101313A (en) | 1992-06-29 | 2000-08-08 | Sony Corporation | High efficiency encoding and decoding of picture signals and recording medium containing same |
| JP3201079B2 (ja) | 1992-07-03 | 2001-08-20 | ケイディーディーアイ株式会社 | インターレース動画像信号の動き補償予測方法、符号化方法及び装置 |
| US5412435A (en) * | 1992-07-03 | 1995-05-02 | Kokusai Denshin Denwa Kabushiki Kaisha | Interlaced video signal motion compensation prediction system |
| JP2510456B2 (ja) | 1992-08-27 | 1996-06-26 | 三菱電機株式会社 | 画像符号化装置 |
| JPH06153180A (ja) | 1992-09-16 | 1994-05-31 | Fujitsu Ltd | 画像データ符号化方法及び装置 |
| KR0166722B1 (ko) | 1992-11-30 | 1999-03-20 | 윤종용 | 부호화 및 복호화방법 및 그 장치 |
| US5467134A (en) | 1992-12-22 | 1995-11-14 | Microsoft Corporation | Method and system for compressing video data |
| US5400075A (en) * | 1993-01-13 | 1995-03-21 | Thomson Consumer Electronics, Inc. | Adaptive variable length encoder/decoder |
| US5592228A (en) | 1993-03-04 | 1997-01-07 | Kabushiki Kaisha Toshiba | Video encoder using global motion estimation and polygonal patch motion estimation |
| JPH06276481A (ja) | 1993-03-18 | 1994-09-30 | Sony Corp | 画像信号符号化及び復号化方法、並びに記録媒体 |
| JP3312417B2 (ja) | 1993-03-18 | 2002-08-05 | ソニー株式会社 | 画像信号符号化装置及び画像信号復号化装置 |
| DE69428019T2 (de) | 1993-03-24 | 2002-05-29 | Sony Corp., Tokio/Tokyo | Verfahren und vorrichtung zur kodierung/dekodierung von bewegungsvektoren, und verfahren und vorrichtung zur kodierung/dekodierung von bildsignalen |
| US5612732A (en) | 1993-03-31 | 1997-03-18 | Casio Computer Co., Ltd. | Portable compact imaging and displaying apparatus with rotatable camera |
| JP3500634B2 (ja) * | 1993-04-08 | 2004-02-23 | ソニー株式会社 | 動きベクトル検出装置 |
| US5442400A (en) | 1993-04-29 | 1995-08-15 | Rca Thomson Licensing Corporation | Error concealment apparatus for MPEG-like video data |
| DE69416717T2 (de) | 1993-05-21 | 1999-10-07 | Nippon Telegraph And Telephone Corp., Tokio/Tokyo | Bewegtbildkoder und -dekoder |
| US5448297A (en) | 1993-06-16 | 1995-09-05 | Intel Corporation | Method and system for encoding images using skip blocks |
| US5477272A (en) | 1993-07-22 | 1995-12-19 | Gte Laboratories Incorporated | Variable-block size multi-resolution motion estimation scheme for pyramid coding |
| US5453799A (en) | 1993-11-05 | 1995-09-26 | Comsat Corporation | Unified motion estimation architecture |
| CA2118880A1 (en) * | 1994-03-11 | 1995-09-12 | Kannan Ramchandran | Jpeg/mpeg decoder-compatible optimized thresholding for image and video signal compression |
| EP0675652B1 (fr) | 1994-03-30 | 2009-05-13 | Nxp B.V. | Procédé et circuit d'estimation de mouvement entre images à deux trames entrelacées, et dispositif de codage de signaux numériques comprenant un tel circuit |
| JP3589480B2 (ja) | 1994-03-31 | 2004-11-17 | 三菱電機株式会社 | 映像信号符号化方式 |
| US6091460A (en) | 1994-03-31 | 2000-07-18 | Mitsubishi Denki Kabushiki Kaisha | Video signal encoding method and system |
| TW283289B (ru) | 1994-04-11 | 1996-08-11 | Gen Instrument Corp | |
| US5767898A (en) * | 1994-06-23 | 1998-06-16 | Sanyo Electric Co., Ltd. | Three-dimensional image coding by merger of left and right images |
| US5796438A (en) | 1994-07-05 | 1998-08-18 | Sony Corporation | Methods and apparatus for interpolating picture information |
| US5594504A (en) * | 1994-07-06 | 1997-01-14 | Lucent Technologies Inc. | Predictive video coding using a motion vector updating routine |
| KR0126871B1 (ko) | 1994-07-30 | 1997-12-29 | 심상철 | 양방향 이동벡터 추정을 위한 고속 블럭정합 방식 |
| FR2725577B1 (fr) | 1994-10-10 | 1996-11-29 | Thomson Consumer Electronics | Procede de codage ou de decodage de vecteurs mouvement et dispositif de codage ou de decodage mettant en oeuvre ledit procede |
| JP3474005B2 (ja) | 1994-10-13 | 2003-12-08 | 沖電気工業株式会社 | 動画像符号化方法及び動画像復号方法 |
| EP0710033A3 (en) * | 1994-10-28 | 1999-06-09 | Matsushita Electric Industrial Co., Ltd. | MPEG video decoder having a high bandwidth memory |
| US5623311A (en) * | 1994-10-28 | 1997-04-22 | Matsushita Electric Corporation Of America | MPEG video decoder having a high bandwidth memory |
| JPH08140099A (ja) | 1994-11-11 | 1996-05-31 | Canon Inc | 符号化装置及び方法 |
| JP2951861B2 (ja) | 1994-12-28 | 1999-09-20 | シャープ株式会社 | 画像符号化装置及び画像復号装置 |
| US5691771A (en) | 1994-12-29 | 1997-11-25 | Sony Corporation | Processing of redundant fields in a moving picture to achieve synchronized system operation |
| US5619281A (en) * | 1994-12-30 | 1997-04-08 | Daewoo Electronics Co., Ltd | Method and apparatus for detecting motion vectors in a frame decimating video encoder |
| US6275532B1 (en) | 1995-03-18 | 2001-08-14 | Sharp Kabushiki Kaisha | Video coding device and video decoding device with a motion compensated interframe prediction |
| KR0171118B1 (ko) * | 1995-03-20 | 1999-03-20 | 배순훈 | 비디오신호 부호화 장치 |
| KR0181027B1 (ko) * | 1995-03-20 | 1999-05-01 | 배순훈 | 화소 단위 움직임 추정을 이용하는 영상처리 시스템 |
| JP3803122B2 (ja) * | 1995-05-02 | 2006-08-02 | 松下電器産業株式会社 | 画像メモリ装置および動きベクトル検出回路 |
| GB2303267B (en) | 1995-06-06 | 2000-03-22 | Sony Uk Ltd | Video compression |
| GB2301970B (en) | 1995-06-06 | 2000-03-01 | Sony Uk Ltd | Motion compensated video processing |
| US5731850A (en) * | 1995-06-07 | 1998-03-24 | Maturi; Gregory V. | Hybrid hierarchial/full-search MPEG encoder motion estimation |
| US5687097A (en) | 1995-07-13 | 1997-11-11 | Zapex Technologies, Inc. | Method and apparatus for efficiently determining a frame motion vector in a video encoder |
| US5883678A (en) | 1995-09-29 | 1999-03-16 | Kabushiki Kaisha Toshiba | Video coding and video decoding apparatus for reducing an alpha-map signal at a controlled reduction ratio |
| US5933535A (en) | 1995-10-05 | 1999-08-03 | Microsoft Corporation | Object-based video compression process employing arbitrarily-shaped features |
| JPH09107547A (ja) | 1995-10-09 | 1997-04-22 | Hitachi Ltd | 既圧縮動画データ量削減装置および既圧縮動画データ量削減システムならびに既圧縮動画データ量削減方法 |
| JP3377893B2 (ja) | 1995-10-25 | 2003-02-17 | 沖電気工業株式会社 | 動画像符号化復号化装置 |
| US5929940A (en) | 1995-10-25 | 1999-07-27 | U.S. Philips Corporation | Method and device for estimating motion between images, system for encoding segmented images |
| US6192081B1 (en) * | 1995-10-26 | 2001-02-20 | Sarnoff Corporation | Apparatus and method for selecting a coding mode in a block-based coding system |
| KR100211917B1 (ko) | 1995-10-26 | 1999-08-02 | 김영환 | 물체 모양정보 부호화 방법 |
| US5963673A (en) | 1995-12-20 | 1999-10-05 | Sanyo Electric Co., Ltd. | Method and apparatus for adaptively selecting a coding mode for video encoding |
| JPH09182083A (ja) * | 1995-12-27 | 1997-07-11 | Matsushita Electric Ind Co Ltd | ビデオ画像符号化方法及び復号化方法とその装置 |
| US6055012A (en) * | 1995-12-29 | 2000-04-25 | Lucent Technologies Inc. | Digital multi-view video compression with complexity and compatibility constraints |
| US5787203A (en) | 1996-01-19 | 1998-07-28 | Microsoft Corporation | Method and system for filtering compressed video images |
| US5737019A (en) | 1996-01-29 | 1998-04-07 | Matsushita Electric Corporation Of America | Method and apparatus for changing resolution by direct DCT mapping |
| US6957350B1 (en) * | 1996-01-30 | 2005-10-18 | Dolby Laboratories Licensing Corporation | Encrypted and watermarked temporal and resolution layering in advanced television |
| US5798788A (en) | 1996-02-01 | 1998-08-25 | David Sarnoff Research Center, Inc. | Method and apparatus for evaluating field display functionality of a video decoder |
| EP0793389B1 (en) | 1996-02-27 | 2001-08-16 | STMicroelectronics S.r.l. | Memory reduction in the MPEG-2 main profile main level decoder |
| US5982438A (en) | 1996-03-22 | 1999-11-09 | Microsoft Corporation | Overlapped motion compensation for object coding |
| JP3371191B2 (ja) | 1996-03-22 | 2003-01-27 | ソニー株式会社 | 画像信号の符号化方法及び復号方法、並びに、符号化装置及び復号装置 |
| US5847776A (en) | 1996-06-24 | 1998-12-08 | Vdonet Corporation Ltd. | Method for entropy constrained motion estimation and coding of motion vectors with increased search range |
| JPH105664A (ja) | 1996-06-25 | 1998-01-13 | Mitsubishi Chem Corp | ダイコータ |
| JP3263807B2 (ja) | 1996-09-09 | 2002-03-11 | ソニー株式会社 | 画像符号化装置および画像符号化方法 |
| DE19637522A1 (de) | 1996-09-13 | 1998-03-19 | Bosch Gmbh Robert | Verfahren zur Reduzierung von Daten in Videosignalen |
| US6130963A (en) | 1996-11-22 | 2000-10-10 | C-Cube Semiconductor Ii, Inc. | Memory efficient decoding of video frame chroma |
| AU5410298A (en) | 1996-12-12 | 1998-07-03 | Matsushita Electric Industrial Co., Ltd. | Picture encoder and picture decoder |
| US6377628B1 (en) * | 1996-12-18 | 2002-04-23 | Thomson Licensing S.A. | System for maintaining datastream continuity in the presence of disrupted source data |
| US6167090A (en) | 1996-12-26 | 2000-12-26 | Nippon Steel Corporation | Motion vector detecting apparatus |
| KR20000064585A (ko) | 1997-01-13 | 2000-11-06 | 요트.게.아. 롤페즈 | 디지털 비디오 신호에 보조 데이터 삽입 방법 및장치 |
| EP0786907A3 (en) | 1997-01-24 | 2001-06-13 | Texas Instruments Incorporated | Video encoder |
| JPH10224800A (ja) | 1997-02-07 | 1998-08-21 | Matsushita Electric Ind Co Ltd | 動きベクトル符号化方法および復号化方法 |
| DE69840082D1 (de) | 1997-02-14 | 2008-11-13 | Nippon Telegraph & Telephone | Prädikatives Dekodierungsverfahren von Videodaten |
| US6201927B1 (en) * | 1997-02-18 | 2001-03-13 | Mary Lafuze Comer | Trick play reproduction of MPEG encoded signals |
| USRE38564E1 (en) | 1997-03-07 | 2004-08-10 | General Instrument Corporation | Motion estimation and compensation of video object planes for interlaced digital video |
| US5974184A (en) | 1997-03-07 | 1999-10-26 | General Instrument Corporation | Intra-macroblock DC and AC coefficient prediction for interlaced digital video |
| US6005980A (en) * | 1997-03-07 | 1999-12-21 | General Instrument Corporation | Motion estimation and compensation of video object planes for interlaced digital video |
| US5991447A (en) * | 1997-03-07 | 1999-11-23 | General Instrument Corporation | Prediction and coding of bi-directionally predicted video object planes for interlaced digital video |
| US6175592B1 (en) * | 1997-03-12 | 2001-01-16 | Matsushita Electric Industrial Co., Ltd. | Frequency domain filtering for down conversion of a DCT encoded picture |
| US5844613A (en) | 1997-03-17 | 1998-12-01 | Microsoft Corporation | Global motion estimator for motion video signal encoding |
| US6263065B1 (en) | 1997-03-18 | 2001-07-17 | At&T Corp. | Method and apparatus for simulating central queue for distributing call in distributed arrangement of automatic call distributors |
| US6404813B1 (en) * | 1997-03-27 | 2002-06-11 | At&T Corp. | Bidirectionally predicted pictures or video object planes for efficient and flexible video coding |
| US5973755A (en) | 1997-04-04 | 1999-10-26 | Microsoft Corporation | Video encoder and decoder using bilinear motion compensation and lapped orthogonal transforms |
| JP3129986B2 (ja) | 1997-04-09 | 2001-01-31 | 日本車輌製造株式会社 | 杭施工機のトルク管理装置 |
| US6633611B2 (en) | 1997-04-24 | 2003-10-14 | Mitsubishi Denki Kabushiki Kaisha | Method and apparatus for region-based moving image encoding and decoding |
| JP3351705B2 (ja) | 1997-04-25 | 2002-12-03 | 日本ビクター株式会社 | 動き補償符号化装置、動き補償符号化方法、及び記録媒体への記録方法 |
| JP3164031B2 (ja) * | 1997-05-30 | 2001-05-08 | 日本ビクター株式会社 | 動画像符号化復号化装置、動画像符号化復号化方法、及び動画像符号化記録媒体 |
| US6067322A (en) * | 1997-06-04 | 2000-05-23 | Microsoft Corporation | Half pixel motion estimation in motion video signal encoding |
| ES2545089T3 (es) | 1997-06-09 | 2015-09-08 | Hitachi, Ltd. | Procedimiento de decodificación de imágenes |
| JPH1169345A (ja) | 1997-06-11 | 1999-03-09 | Fujitsu Ltd | フレーム間予測動画像符号化装置及び復号装置並びにフレーム間予測動画像符号化方法及び復号方法 |
| US6064771A (en) | 1997-06-23 | 2000-05-16 | Real-Time Geometry Corp. | System and method for asynchronous, adaptive moving picture compression, and decompression |
| JP2828095B2 (ja) | 1997-06-23 | 1998-11-25 | 松下電器産業株式会社 | 画像信号復号化装置及び画像信号復号化方法 |
| JP2914448B2 (ja) | 1997-06-25 | 1999-06-28 | 日本電信電話株式会社 | 動きベクトル予測符号化方法および動きベクトル復号方法、予測符号化装置および復号装置、並びに、動きベクトルの予測符号化プログラムおよび復号プログラムを記録した記録媒体 |
| JP2897763B2 (ja) * | 1997-07-28 | 1999-05-31 | 日本ビクター株式会社 | 動き補償符号化装置、復号化装置、符号化方法及び復号化方法 |
| JP3570863B2 (ja) | 1997-08-05 | 2004-09-29 | 三菱電機株式会社 | 動画像復号化装置および動画像復号化方法 |
| KR100252342B1 (ko) | 1997-08-12 | 2000-04-15 | 전주범 | 움직임 벡터 부호화 방법 및 그 장치 |
| KR100235356B1 (ko) | 1997-08-13 | 1999-12-15 | 전주범 | 개선된 움직임 추정 장치 및 그 추정 방법 |
| JPH11136683A (ja) | 1997-10-27 | 1999-05-21 | Matsushita Electric Ind Co Ltd | 映像信号符号化装置 |
| US6477202B1 (en) | 1997-09-03 | 2002-11-05 | Matsushita Electric Industrial Co., Ltd. | Apparatus of layered picture coding, apparatus of picture decoding, methods of picture decoding, apparatus of recording for digital broadcasting signal, and apparatus of picture and audio decoding |
| US6807231B1 (en) | 1997-09-12 | 2004-10-19 | 8×8, Inc. | Multi-hypothesis motion-compensated video image predictor |
| US6249318B1 (en) * | 1997-09-12 | 2001-06-19 | 8×8, Inc. | Video coding/decoding arrangement and method therefor |
| WO1999026416A2 (en) | 1997-11-17 | 1999-05-27 | Koninklijke Philips Electronics N.V. | Motion-compensated predictive image encoding and decoding |
| CN1220388C (zh) | 1997-12-01 | 2005-09-21 | 三星电子株式会社 | 运动向量预测方法 |
| US5973743A (en) | 1997-12-02 | 1999-10-26 | Daewoo Electronics Co., Ltd. | Mode coding method and apparatus for use in an interlaced shape coder |
| EP0921683B1 (en) | 1997-12-02 | 2010-09-08 | Daewoo Electronics Corporation | Method and apparatus for encoding mode signals for use in a binary shape coder |
| US6122017A (en) * | 1998-01-22 | 2000-09-19 | Hewlett-Packard Company | Method for providing motion-compensated multi-field enhancement of still images from video |
| KR100328417B1 (ko) * | 1998-03-05 | 2002-03-16 | 마츠시타 덴끼 산교 가부시키가이샤 | 화상부호화장치및화상복호화장치, 화상부보화방법 및 화상복호화방법, 및 데이터기억매체 |
| CA2265089C (en) * | 1998-03-10 | 2007-07-10 | Sony Corporation | Transcoding system using encoding history information |
| EP0944245B1 (en) * | 1998-03-20 | 2001-07-25 | SGS-THOMSON MICROELECTRONICS S.r.l. | Hierarchical recursive motion estimator for video images encoder |
| KR100281462B1 (ko) * | 1998-03-30 | 2001-02-01 | 전주범 | 격행 부호화에서 이진 형상 신호의 움직임 벡터 부호화 방법 |
| JP3888597B2 (ja) | 1998-06-24 | 2007-03-07 | 日本ビクター株式会社 | 動き補償符号化装置、及び動き補償符号化復号化方法 |
| US6519287B1 (en) * | 1998-07-13 | 2003-02-11 | Motorola, Inc. | Method and apparatus for encoding and decoding video signals by using storage and retrieval of motion vectors |
| JP4026238B2 (ja) * | 1998-07-23 | 2007-12-26 | ソニー株式会社 | 画像復号装置及び画像復号方法 |
| GB2343579A (en) | 1998-11-07 | 2000-05-10 | Ibm | Hybrid-linear-bicubic interpolation method and apparatus |
| US6081209A (en) * | 1998-11-12 | 2000-06-27 | Hewlett-Packard Company | Search system for use in compression |
| US6563953B2 (en) * | 1998-11-30 | 2003-05-13 | Microsoft Corporation | Predictive image compression using a single variable length code for both the luminance and chrominance blocks for each macroblock |
| US6983018B1 (en) * | 1998-11-30 | 2006-01-03 | Microsoft Corporation | Efficient motion vector coding for video compression |
| US6192080B1 (en) * | 1998-12-04 | 2001-02-20 | Mitsubishi Electric Research Laboratories, Inc. | Motion compensated digital video signal processing |
| KR100587280B1 (ko) * | 1999-01-12 | 2006-06-08 | 엘지전자 주식회사 | 오류 은폐방법 |
| US6414992B1 (en) | 1999-01-27 | 2002-07-02 | Sun Microsystems, Inc. | Optimal encoding of motion compensated video |
| US6483874B1 (en) | 1999-01-27 | 2002-11-19 | General Instrument Corporation | Efficient motion estimation for an arbitrarily-shaped object |
| JP2000244921A (ja) | 1999-02-24 | 2000-09-08 | Matsushita Electric Ind Co Ltd | 映像符号化方法および装置 |
| JP2000278692A (ja) * | 1999-03-25 | 2000-10-06 | Victor Co Of Japan Ltd | 圧縮データ処理方法及び処理装置並びに記録再生システム |
| US6320593B1 (en) | 1999-04-20 | 2001-11-20 | Agilent Technologies, Inc. | Method of fast bi-cubic interpolation of image information |
| JP2000308064A (ja) | 1999-04-22 | 2000-11-02 | Mitsubishi Electric Corp | 動きベクトル検出装置 |
| JP3411234B2 (ja) | 1999-04-26 | 2003-05-26 | 沖電気工業株式会社 | 符号化情報受信復号装置 |
| US6697430B1 (en) | 1999-05-19 | 2004-02-24 | Matsushita Electric Industrial Co., Ltd. | MPEG encoder |
| EP1056297A3 (en) | 1999-05-24 | 2002-10-02 | Agilent Technologies, Inc. (a Delaware corporation) | Multimedia decoder with error detection |
| JP2000350212A (ja) | 1999-06-04 | 2000-12-15 | Matsushita Electric Ind Co Ltd | 映像信号復号装置並びに映像信号表示システム |
| EP1142343A1 (en) | 1999-10-29 | 2001-10-10 | Koninklijke Philips Electronics N.V. | Video encoding method |
| US6671319B1 (en) | 1999-12-28 | 2003-12-30 | Sony Corporation | Methods and apparatus for motion estimation using neighboring macroblocks |
| KR100619377B1 (ko) | 2000-02-22 | 2006-09-08 | 주식회사 팬택앤큐리텔 | 움직임 추정 방법 및 장치 |
| DE60130180T2 (de) | 2000-04-14 | 2008-05-15 | Sony Corp. | Verfahren zur kodierung und dekodierung, aufzeichnungsmedium und programm |
| US6654419B1 (en) | 2000-04-28 | 2003-11-25 | Sun Microsystems, Inc. | Block-based, adaptive, lossless video coder |
| US6876703B2 (en) * | 2000-05-11 | 2005-04-05 | Ub Video Inc. | Method and apparatus for video coding |
| GB2362533A (en) * | 2000-05-15 | 2001-11-21 | Nokia Mobile Phones Ltd | Encoding a video signal with an indicator of the type of error concealment used |
| US6647061B1 (en) * | 2000-06-09 | 2003-11-11 | General Instrument Corporation | Video size conversion and transcoding from MPEG-2 to MPEG-4 |
| KR100708091B1 (ko) * | 2000-06-13 | 2007-04-16 | 삼성전자주식회사 | 양방향 움직임 벡터를 이용한 프레임 레이트 변환 장치 및그 방법 |
| US7023922B1 (en) | 2000-06-21 | 2006-04-04 | Microsoft Corporation | Video coding system and method using 3-D discrete wavelet transform and entropy coding with motion information |
| US6614442B1 (en) | 2000-06-26 | 2003-09-02 | S3 Graphics Co., Ltd. | Macroblock tiling format for motion compensation |
| KR100353851B1 (ko) | 2000-07-07 | 2002-09-28 | 한국전자통신연구원 | 파문 스캔 장치 및 그 방법과 그를 이용한 영상코딩/디코딩 장치 및 그 방법 |
| RU2182727C2 (ru) | 2000-07-20 | 2002-05-20 | Дворкович Александр Викторович | Способ поиска векторов движения деталей в динамических изображениях |
| JP2002121053A (ja) | 2000-10-11 | 2002-04-23 | Koyu Sangyo Kk | セメント、コンクリート混和材及びその製造方法 |
| KR100727910B1 (ko) * | 2000-10-11 | 2007-06-13 | 삼성전자주식회사 | 하이브리드형 고속 움직임 추정 방법 및 그 장치 |
| JP4682410B2 (ja) | 2000-10-12 | 2011-05-11 | ソニー株式会社 | 画像処理装置及び画像処理方法 |
| WO2002037859A2 (en) * | 2000-11-03 | 2002-05-10 | Compression Science | Video data compression system |
| JP4557411B2 (ja) | 2000-11-17 | 2010-10-06 | 大阪瓦斯株式会社 | 流体流量計測システム |
| KR20030005166A (ko) * | 2000-11-23 | 2003-01-17 | 코닌클리케 필립스 일렉트로닉스 엔.브이. | 비디오 코딩 방법 및 대응하는 인코더 |
| JP2002177889A (ja) | 2000-12-12 | 2002-06-25 | Iseki & Co Ltd | 回転式穀粒選別装置 |
| US6633612B2 (en) | 2000-12-13 | 2003-10-14 | Genesis Microchip Inc. | Method and apparatus for detecting motion between odd and even video fields |
| JP4526700B2 (ja) | 2000-12-27 | 2010-08-18 | 株式会社エクォス・リサーチ | 配光制御装置 |
| US6920175B2 (en) | 2001-01-03 | 2005-07-19 | Nokia Corporation | Video coding architecture and methods for using same |
| JP2002204713A (ja) | 2001-01-11 | 2002-07-23 | Taishou:Kk | ヘアーグリップ |
| US20020168066A1 (en) | 2001-01-22 | 2002-11-14 | Weiping Li | Video encoding and decoding techniques and apparatus |
| US8374237B2 (en) | 2001-03-02 | 2013-02-12 | Dolby Laboratories Licensing Corporation | High precision encoding and decoding of video images |
| AU2002245609A1 (en) * | 2001-03-05 | 2002-09-19 | Intervideo, Inc. | Systems and methods of error resilience in a video decoder |
| US7206453B2 (en) | 2001-05-03 | 2007-04-17 | Microsoft Corporation | Dynamic filtering for lossy compression |
| US6816552B2 (en) | 2001-07-11 | 2004-11-09 | Dolby Laboratories Licensing Corporation | Interpolation of video compression frames |
| US6975680B2 (en) | 2001-07-12 | 2005-12-13 | Dolby Laboratories, Inc. | Macroblock mode decision biasing for video compression systems |
| JP2002118598A (ja) | 2001-08-06 | 2002-04-19 | Nippon Telegr & Teleph Corp <Ntt> | 輻輳検出方法、輻輳防止方法、およびパケット通信システム |
| US6804301B2 (en) * | 2001-08-15 | 2004-10-12 | General Instrument Corporation | First pass encoding of I and P-frame complexity for compressed digital video |
| US6950469B2 (en) | 2001-09-17 | 2005-09-27 | Nokia Corporation | Method for sub-pixel value interpolation |
| US6980596B2 (en) * | 2001-11-27 | 2005-12-27 | General Instrument Corporation | Macroblock level adaptive frame/field coding for digital video content |
| US20030099294A1 (en) * | 2001-11-27 | 2003-05-29 | Limin Wang | Picture level adaptive frame/field coding for digital video content |
| EP1449385B1 (en) | 2001-11-21 | 2015-07-22 | Google Technology Holdings LLC | Macroblock level adaptive frame/field coding for digital video content |
| US7200275B2 (en) * | 2001-12-17 | 2007-04-03 | Microsoft Corporation | Skip macroblock coding |
| CN101448162B (zh) | 2001-12-17 | 2013-01-02 | 微软公司 | 处理视频图像的方法 |
| US6873657B2 (en) * | 2001-12-27 | 2005-03-29 | Koninklijke Philips Electronics, N.V. | Method of and system for improving temporal consistency in sharpness enhancement for a video signal |
| JP4114859B2 (ja) * | 2002-01-09 | 2008-07-09 | 松下電器産業株式会社 | 動きベクトル符号化方法および動きベクトル復号化方法 |
| EP1670259A3 (en) | 2002-01-23 | 2010-03-03 | Nokia Corporation | Grouping of image frames in video coding |
| FI114433B (fi) | 2002-01-23 | 2004-10-15 | Nokia Corp | Otossiirtymän koodaaminen videokoodauksessa |
| US7003035B2 (en) * | 2002-01-25 | 2006-02-21 | Microsoft Corporation | Video coding methods and apparatuses |
| US6798364B2 (en) | 2002-02-05 | 2004-09-28 | Intel Corporation | Method and apparatus for variable length coding |
| JP2004208259A (ja) | 2002-04-19 | 2004-07-22 | Matsushita Electric Ind Co Ltd | 動きベクトル計算方法 |
| EP3324625B1 (en) * | 2002-04-19 | 2019-06-12 | Panasonic Intellectual Property Corporation of America | Motion vector calculating method |
| KR100931746B1 (ko) | 2002-04-19 | 2009-12-14 | 파나소닉 주식회사 | 움직임 벡터 계산방법 |
| KR100481732B1 (ko) * | 2002-04-20 | 2005-04-11 | 전자부품연구원 | 다 시점 동영상 부호화 장치 |
| US20030202590A1 (en) | 2002-04-30 | 2003-10-30 | Qunshan Gu | Video encoding using direct mode predicted frames |
| KR100491530B1 (ko) | 2002-05-03 | 2005-05-27 | 엘지전자 주식회사 | 모션 벡터 결정 방법 |
| US20040190615A1 (en) * | 2002-05-22 | 2004-09-30 | Kiyofumi Abe | Moving image encoding method, moving image decoding method, and data recording medium |
| US20040001546A1 (en) * | 2002-06-03 | 2004-01-01 | Alexandros Tourapis | Spatiotemporal prediction for bidirectionally predictive (B) pictures and motion vector prediction for multi-picture reference motion compensation |
| WO2004006586A1 (ja) | 2002-07-02 | 2004-01-15 | Matsushita Electric Industrial Co., Ltd. | 画像符号化方法および画像復号化方法 |
| US7280700B2 (en) * | 2002-07-05 | 2007-10-09 | Microsoft Corporation | Optimization techniques for data compression |
| CN100566420C (zh) * | 2002-07-15 | 2009-12-02 | 株式会社日立制作所 | 动态图像的编码方法 |
| CN102291585A (zh) | 2002-07-15 | 2011-12-21 | 诺基亚有限公司 | 用于视频序列中错误隐藏的方法 |
| US7154952B2 (en) * | 2002-07-19 | 2006-12-26 | Microsoft Corporation | Timestamp-independent motion vector prediction for predictive (P) and bidirectionally predictive (B) pictures |
| HUE047568T2 (hu) * | 2002-08-08 | 2020-04-28 | Godo Kaisha Ip Bridge 1 | Mozgókép dekódoló eljárás |
| KR100506864B1 (ko) | 2002-10-04 | 2005-08-05 | 엘지전자 주식회사 | 모션벡터 결정방법 |
| WO2004038921A2 (en) | 2002-10-23 | 2004-05-06 | Divxnetworks, Inc. | Method and system for supercompression of compressed digital video |
| JP4093405B2 (ja) | 2002-10-25 | 2008-06-04 | 株式会社リコー | 画像処理装置、プログラム及び記憶媒体 |
| US7227901B2 (en) | 2002-11-21 | 2007-06-05 | Ub Video Inc. | Low-complexity deblocking filter |
| JP2004228259A (ja) * | 2003-01-22 | 2004-08-12 | Hitachi Ltd | 半導体装置及びそれを用いた電子装置 |
| MY136056A (en) | 2003-02-18 | 2008-08-29 | Nokia Corp | Picture decoding method |
| MXPA05014211A (es) | 2003-06-25 | 2006-05-31 | Thomson Licensing | Codificacion de decision en modo rapido para inter-estructuras. |
| US7426308B2 (en) * | 2003-07-18 | 2008-09-16 | Microsoft Corporation | Intraframe and interframe interlace coding and decoding |
| US7609763B2 (en) | 2003-07-18 | 2009-10-27 | Microsoft Corporation | Advanced bi-directional predictive coding of video frames |
| US20050013498A1 (en) * | 2003-07-18 | 2005-01-20 | Microsoft Corporation | Coding of motion vector information |
| US8064520B2 (en) * | 2003-09-07 | 2011-11-22 | Microsoft Corporation | Advanced bi-directional predictive coding of interlaced video |
| US7567617B2 (en) * | 2003-09-07 | 2009-07-28 | Microsoft Corporation | Predicting motion vectors for fields of forward-predicted interlaced video frames |
| US7317839B2 (en) * | 2003-09-07 | 2008-01-08 | Microsoft Corporation | Chroma motion vector derivation for interlaced forward-predicted fields |
| US7092576B2 (en) | 2003-09-07 | 2006-08-15 | Microsoft Corporation | Bitplane coding for macroblock field/frame coding type information |
| US7961786B2 (en) * | 2003-09-07 | 2011-06-14 | Microsoft Corporation | Signaling field type information |
| US7346111B2 (en) * | 2003-12-10 | 2008-03-18 | Lsi Logic Corporation | Co-located motion vector storage |
| KR20050061762A (ko) | 2003-12-18 | 2005-06-23 | 학교법인 대양학원 | 부호화 모드 결정방법, 움직임 추정방법 및 부호화 장치 |
| US7889792B2 (en) | 2003-12-24 | 2011-02-15 | Apple Inc. | Method and system for video encoding using a variable number of B frames |
| US8036271B2 (en) | 2004-02-24 | 2011-10-11 | Lsi Corporation | Method and apparatus for determining a second picture for temporal direct-mode block prediction |
| US20050207490A1 (en) | 2004-03-18 | 2005-09-22 | Wang Jason N | Stored picture index for AVC coding |
| US8116374B2 (en) | 2004-05-07 | 2012-02-14 | Broadcom Corporation | Method and system for generating a transform size syntax element for video decoding |
| FR2872973A1 (fr) * | 2004-07-06 | 2006-01-13 | Thomson Licensing Sa | Procede ou dispositif de codage d'une sequence d'images sources |
| JP5199123B2 (ja) | 2006-01-12 | 2013-05-15 | エルジー エレクトロニクス インコーポレイティド | 多視点ビデオの処理 |
| MX2009000205A (es) | 2006-07-06 | 2009-03-23 | Thomson Licensing | Metodo y aparato para desacoplar el numero de cuadro y/o la cuenta del orden de imagen (poc) para la codificacion y decodificacion de video de multiples vistas. |
| JP4592656B2 (ja) * | 2006-08-17 | 2010-12-01 | 富士通セミコンダクター株式会社 | 動き予測処理装置、画像符号化装置および画像復号化装置 |
| TW200820791A (en) | 2006-08-25 | 2008-05-01 | Lg Electronics Inc | A method and apparatus for decoding/encoding a video signal |
| CA3006093C (en) * | 2006-10-16 | 2022-07-19 | Nokia Technologies Oy | System and method for implementing efficient decoded buffer management in multi-view video coding |
| JP3129986U (ja) | 2006-12-26 | 2007-03-08 | ライオン株式会社 | 板状緩衝材 |
| US9648325B2 (en) | 2007-06-30 | 2017-05-09 | Microsoft Technology Licensing, Llc | Video decoding implementations for a graphics processing unit |
| US8265144B2 (en) | 2007-06-30 | 2012-09-11 | Microsoft Corporation | Innovations in video decoder implementations |
| US8254455B2 (en) | 2007-06-30 | 2012-08-28 | Microsoft Corporation | Computing collocated macroblock information for direct mode macroblocks |
| US8189666B2 (en) | 2009-02-02 | 2012-05-29 | Microsoft Corporation | Local picture identifier and computation of co-located information |
| JP6078298B2 (ja) | 2012-11-01 | 2017-02-08 | 武蔵エンジニアリング株式会社 | 位置補正機能を有する作業装置および作業方法 |
-
2003
- 2003-05-23 US US10/444,511 patent/US20040001546A1/en not_active Abandoned
- 2003-05-27 EP EP03011935A patent/EP1369820A3/en not_active Withdrawn
- 2003-05-29 AU AU2003204477A patent/AU2003204477B2/en not_active Expired
- 2003-05-29 CA CA2430460A patent/CA2430460C/en not_active Expired - Lifetime
- 2003-05-30 BR BR0302164-5A patent/BR0302164A/pt active IP Right Grant
- 2003-06-02 KR KR1020030035240A patent/KR100958499B1/ko active IP Right Grant
- 2003-06-02 RU RU2003116281/09A patent/RU2310231C2/ru active
- 2003-06-02 MX MXPA03004906A patent/MXPA03004906A/es active IP Right Grant
- 2003-06-02 JP JP2003157240A patent/JP4733341B2/ja not_active Expired - Lifetime
- 2003-06-03 CN CNB031412750A patent/CN100455018C/zh not_active Expired - Lifetime
-
2006
- 2006-09-20 US US11/525,059 patent/US8374245B2/en active Active
-
2013
- 2013-02-06 US US13/760,486 patent/US8873630B2/en not_active Expired - Lifetime
-
2014
- 2014-09-30 US US14/502,529 patent/US9185427B2/en not_active Expired - Lifetime
-
2015
- 2015-10-05 US US14/875,164 patent/US9571854B2/en not_active Expired - Lifetime
-
2016
- 2016-12-27 US US15/391,652 patent/US10116959B2/en not_active Expired - Lifetime
-
2018
- 2018-09-28 US US16/146,133 patent/US10694208B2/en not_active Expired - Fee Related
-
2020
- 2020-05-12 US US16/872,815 patent/US11277636B2/en not_active Expired - Lifetime
-
2022
- 2022-02-10 US US17/669,235 patent/US11575934B2/en not_active Expired - Lifetime
Non-Patent Citations (1)
| Title |
|---|
| Wiegand Thomas Long-Term Memory Motion-Compensated Prediction, IEEE Transactions on Circuits and Systems for Video Technology, September 1998. Kossentini Faouzi Predictive RD Optimized Motion Estimation for Very Low Bit-Rate Video Coding, IEEE JOURNAL ON SELECTED AREAS IN COMMUNICATIONS, VOL.15, №9, DECEMBER 1997. * |
Cited By (123)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2571550C2 (ru) * | 2010-04-12 | 2015-12-20 | Панасоник Интеллекчуал Проперти Корпорэйшн оф Америка | Способ пространственного прогнозирования, способ декодирования изображений и способ кодирования изображений |
| RU2528132C2 (ru) * | 2010-04-13 | 2014-09-10 | Самсунг Электроникс Ко., Лтд. | Способ кодирования видео и устройство кодирования видео с использованием блоков предсказания на основании блоков кодирования, определенных в соответствии с древовидной структурой, и способ декодирования видео и устройство декодирования видео с использованием блоков предсказания на основании блоков кодирования, определенных в соответствии с древовидной структурой |
| RU2731026C1 (ru) * | 2011-01-07 | 2020-08-28 | Нтт Докомо, Инк. | Способ прогнозирующего кодирования, устройство прогнозирующего кодирования и программа прогнозирующего кодирования вектора движения и способ прогнозирующего декодирования, устройство прогнозирующего декодирования и программа прогнозирующего декодирования вектора движения |
| RU2744696C1 (ru) * | 2011-01-07 | 2021-03-15 | Нтт Докомо, Инк. | Способ прогнозирующего кодирования, устройство прогнозирующего кодирования и программа прогнозирующего кодирования вектора движения и способ прогнозирующего декодирования, устройство прогнозирующего декодирования и программа прогнозирующего декодирования вектора движения |
| RU2550554C2 (ru) * | 2011-01-27 | 2015-05-10 | Квэлкомм Инкорпорейтед | Выполнение предсказания вектора движения для видеокодирования |
| US9319716B2 (en) | 2011-01-27 | 2016-04-19 | Qualcomm Incorporated | Performing motion vector prediction for video coding |
| RU2564252C2 (ru) * | 2011-03-09 | 2015-09-27 | Кэнон Кабусики Кайся | Кодирование и декодирование видео |
| RU2642329C1 (ru) * | 2011-03-09 | 2018-01-24 | Кэнон Кабусики Кайся | Кодирование и декодирование видео |
| US10057592B2 (en) | 2011-03-09 | 2018-08-21 | Canon Kabushiki Kaisha | Video encoding and decoding |
| RU2701455C2 (ru) * | 2011-03-09 | 2019-09-26 | Кэнон Кабусики Кайся | Кодирование и декодирование видео |
| RU2740783C1 (ru) * | 2011-03-09 | 2021-01-21 | Кэнон Кабусики Кайся | Кодирование и декодирование видео |
| RU2732534C1 (ru) * | 2011-03-09 | 2020-09-21 | Кэнон Кабусики Кайся | Кодирование и декодирование видео |
| US10382774B2 (en) | 2011-04-12 | 2019-08-13 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US10609406B2 (en) | 2011-04-12 | 2020-03-31 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US10536712B2 (en) | 2011-04-12 | 2020-01-14 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US9445120B2 (en) | 2011-04-12 | 2016-09-13 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US11012705B2 (en) | 2011-04-12 | 2021-05-18 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US10178404B2 (en) | 2011-04-12 | 2019-01-08 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US11356694B2 (en) | 2011-04-12 | 2022-06-07 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US11917186B2 (en) | 2011-04-12 | 2024-02-27 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US9872036B2 (en) | 2011-04-12 | 2018-01-16 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus and moving picture coding and decoding apparatus |
| US10484708B2 (en) | 2011-05-24 | 2019-11-19 | Velos Media, Llc | Decoding method and apparatuses with candidate motion vectors |
| US9826249B2 (en) | 2011-05-24 | 2017-11-21 | Velos Media, Llc | Decoding method and apparatuses with candidate motion vectors |
| US11228784B2 (en) | 2011-05-24 | 2022-01-18 | Velos Media, Llc | Decoding method and apparatuses with candidate motion vectors |
| US10129564B2 (en) | 2011-05-24 | 2018-11-13 | Velos Media, LCC | Decoding method and apparatuses with candidate motion vectors |
| US10200714B2 (en) | 2011-05-27 | 2019-02-05 | Sun Patent Trust | Decoding method and apparatus with candidate motion vectors |
| US9615107B2 (en) | 2011-05-27 | 2017-04-04 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| RU2601192C2 (ru) * | 2011-05-27 | 2016-10-27 | Сан Пэтент Траст | Способ кодирования видео, устройство кодирования видео, способ декодирования видео, устройство декодирования видео и устройство кодирования/декодирования видео |
| US11979582B2 (en) | 2011-05-27 | 2024-05-07 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US9723322B2 (en) | 2011-05-27 | 2017-08-01 | Sun Patent Trust | Decoding method and apparatus with candidate motion vectors |
| US10708598B2 (en) | 2011-05-27 | 2020-07-07 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US10721474B2 (en) | 2011-05-27 | 2020-07-21 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US11895324B2 (en) | 2011-05-27 | 2024-02-06 | Sun Patent Trust | Coding method and apparatus with candidate motion vectors |
| US11575930B2 (en) | 2011-05-27 | 2023-02-07 | Sun Patent Trust | Coding method and apparatus with candidate motion vectors |
| US11570444B2 (en) | 2011-05-27 | 2023-01-31 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US10034001B2 (en) | 2011-05-27 | 2018-07-24 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US10212450B2 (en) | 2011-05-27 | 2019-02-19 | Sun Patent Trust | Coding method and apparatus with candidate motion vectors |
| US10595023B2 (en) | 2011-05-27 | 2020-03-17 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US9838695B2 (en) | 2011-05-27 | 2017-12-05 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US11076170B2 (en) | 2011-05-27 | 2021-07-27 | Sun Patent Trust | Coding method and apparatus with candidate motion vectors |
| US11115664B2 (en) | 2011-05-27 | 2021-09-07 | Sun Patent Trust | Image coding method, image coding apparatus, image decoding method, image decoding apparatus, and image coding and decoding apparatus |
| US9485518B2 (en) | 2011-05-27 | 2016-11-01 | Sun Patent Trust | Decoding method and apparatus with candidate motion vectors |
| US9883199B2 (en) | 2011-05-27 | 2018-01-30 | Sun Patent Trust | Coding method and apparatus with candidate motion vectors |
| US9609356B2 (en) | 2011-05-31 | 2017-03-28 | Sun Patent Trust | Moving picture coding method and apparatus with candidate motion vectors |
| US9900613B2 (en) | 2011-05-31 | 2018-02-20 | Sun Patent Trust | Image coding and decoding system using candidate motion vectors |
| US11368710B2 (en) | 2011-05-31 | 2022-06-21 | Velos Media, Llc | Image decoding method and image decoding apparatus using candidate motion vectors |
| US10645413B2 (en) | 2011-05-31 | 2020-05-05 | Sun Patent Trust | Derivation method and apparatuses with candidate motion vectors |
| US11509928B2 (en) | 2011-05-31 | 2022-11-22 | Sun Patent Trust | Derivation method and apparatuses with candidate motion vectors |
| US11057639B2 (en) | 2011-05-31 | 2021-07-06 | Sun Patent Trust | Derivation method and apparatuses with candidate motion vectors |
| US10951911B2 (en) | 2011-05-31 | 2021-03-16 | Velos Media, Llc | Image decoding method and image decoding apparatus using candidate motion vectors |
| US10412404B2 (en) | 2011-05-31 | 2019-09-10 | Velos Media, Llc | Image decoding method and image decoding apparatus using candidate motion vectors |
| US9819961B2 (en) | 2011-05-31 | 2017-11-14 | Sun Patent Trust | Decoding method and apparatuses with candidate motion vectors |
| US11917192B2 (en) | 2011-05-31 | 2024-02-27 | Sun Patent Trust | Derivation method and apparatuses with candidate motion vectors |
| US11949903B2 (en) | 2011-05-31 | 2024-04-02 | Sun Patent Trust | Image decoding method and image decoding apparatus using candidate motion vectors |
| US10652573B2 (en) | 2011-05-31 | 2020-05-12 | Sun Patent Trust | Video encoding method, video encoding device, video decoding method, video decoding device, and video encoding/decoding device |
| RU2636672C1 (ru) * | 2011-06-27 | 2017-11-27 | Самсунг Электроникс Ко., Лтд. | Способ и устройство для кодирования информации движения, а также способ и устройство для ее декодирования |
| RU2682303C1 (ru) * | 2011-06-27 | 2019-03-18 | Самсунг Электроникс Ко., Лтд. | Способ и устройство для кодирования информации движения, а также способ и устройство для ее декодирования |
| RU2601180C2 (ru) * | 2011-06-27 | 2016-10-27 | Самсунг Электроникс Ко., Лтд. | Способ и устройство для кодирования информации движения, а также способ и устройство для ее декодирования |
| US9432680B2 (en) | 2011-06-27 | 2016-08-30 | Samsung Electronics Co., Ltd. | Method and apparatus for encoding motion information, and method and apparatus for decoding same |
| RU2705435C1 (ru) * | 2011-06-27 | 2019-11-07 | Самсунг Электроникс Ко., Лтд. | Способ и устройство для кодирования информации движения, а также способ и устройство для ее декодирования |
| US10887585B2 (en) | 2011-06-30 | 2021-01-05 | Sun Patent Trust | Image decoding method, image coding method, image decoding apparatus, image coding apparatus, and image coding and decoding apparatus |
| US11553202B2 (en) | 2011-08-03 | 2023-01-10 | Sun Patent Trust | Video encoding method, video encoding apparatus, video decoding method, video decoding apparatus, and video encoding/decoding apparatus |
| US10129561B2 (en) | 2011-08-03 | 2018-11-13 | Sun Patent Trust | Video encoding method, video encoding apparatus, video decoding method, video decoding apparatus, and video encoding/decoding apparatus |
| US9456214B2 (en) | 2011-08-03 | 2016-09-27 | Sun Patent Trust | Moving picture coding method, moving picture coding apparatus, moving picture decoding method, moving picture decoding apparatus, and moving picture coding and decoding apparatus |
| US10440387B2 (en) | 2011-08-03 | 2019-10-08 | Sun Patent Trust | Video encoding method, video encoding apparatus, video decoding method, video decoding apparatus, and video encoding/decoding apparatus |
| US11979598B2 (en) | 2011-08-03 | 2024-05-07 | Sun Patent Trust | Video encoding method, video encoding apparatus, video decoding method, video decoding apparatus, and video encoding/decoding apparatus |
| RU2643450C1 (ru) * | 2011-08-17 | 2018-02-01 | Кэнон Кабусики Кайся | Устройство и способ кодирования изображения, устройство и способ декодирования изображения и носители данных |
| RU2684753C1 (ru) * | 2011-08-17 | 2019-04-12 | Кэнон Кабусики Кайся | Устройство и способ кодирования изображения, устройство и способ декодирования изображения и носители данных |
| US10306256B2 (en) | 2011-08-17 | 2019-05-28 | Canon Kabushiki Kaisha | Method and device for encoding a sequence of images and method and device for decoding a sequence of images |
| RU2708440C1 (ru) * | 2011-08-17 | 2019-12-06 | Кэнон Кабусики Кайся | Устройство и способ кодирования изображения, устройство и способ декодирования изображения и носители данных |
| RU2589402C2 (ru) * | 2011-08-17 | 2016-07-10 | Кэнон Кабусики Кайся | Способ и устройство для кодирования последовательности изображений, а также способ и устройство для декодирования последовательности изображений |
| US10034018B2 (en) | 2011-09-23 | 2018-07-24 | Velos Media, Llc | Decoded picture buffer management |
| US9924185B2 (en) | 2011-09-23 | 2018-03-20 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US9253499B2 (en) | 2011-09-23 | 2016-02-02 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US11490119B2 (en) | 2011-09-23 | 2022-11-01 | Qualcomm Incorporated | Decoded picture buffer management |
| US9253498B2 (en) | 2011-09-23 | 2016-02-02 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US9930359B2 (en) | 2011-09-23 | 2018-03-27 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US9998757B2 (en) | 2011-09-23 | 2018-06-12 | Velos Media, Llc | Reference picture signaling and decoded picture buffer management |
| US10182237B2 (en) | 2011-09-23 | 2019-01-15 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| RU2576499C2 (ru) * | 2011-09-23 | 2016-03-10 | Кт Корпорейшен | Способ получения блока-кандидата на слияние и использующее его устройство |
| US10856007B2 (en) | 2011-09-23 | 2020-12-01 | Velos Media, Llc | Decoded picture buffer management |
| US10542285B2 (en) | 2011-09-23 | 2020-01-21 | Velos Media, Llc | Decoded picture buffer management |
| US10165294B2 (en) | 2011-09-23 | 2018-12-25 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US10165295B2 (en) | 2011-09-23 | 2018-12-25 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US9357225B2 (en) | 2011-09-23 | 2016-05-31 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US9554144B2 (en) | 2011-09-23 | 2017-01-24 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US9578348B2 (en) | 2011-09-23 | 2017-02-21 | Kt Corporation | Method for inducing a merge candidate block and device using same |
| US11647208B2 (en) | 2011-10-19 | 2023-05-09 | Sun Patent Trust | Picture coding method, picture coding apparatus, picture decoding method, and picture decoding apparatus |
| US11218708B2 (en) | 2011-10-19 | 2022-01-04 | Sun Patent Trust | Picture decoding method for decoding using a merging candidate selected from a first merging candidate derived using a first derivation process and a second merging candidate derived using a second derivation process |
| US11122289B2 (en) | 2011-10-21 | 2021-09-14 | Nokia Technologies Oy | Method for video coding and an apparatus |
| US9992511B2 (en) | 2011-10-21 | 2018-06-05 | Nokia Technologies Oy | Method for video coding and an apparatus |
| RU2577181C2 (ru) * | 2011-10-21 | 2016-03-10 | Нокиа Текнолоджиз Ой | Способ и устройство для кодирования видеосигналов |
| RU2584491C2 (ru) * | 2011-10-31 | 2016-05-20 | Квэлкомм Инкорпорейтед | Произвольный доступ с усовершенствованным управлением буфером декодированных изображений (dpb) при кодировании видео |
| RU2577779C2 (ru) * | 2011-11-07 | 2016-03-20 | Квэлкомм Инкорпорейтед | Генерирование дополнительных кандидатов для слияния |
| US9516334B2 (en) | 2011-11-08 | 2016-12-06 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US11711523B2 (en) | 2011-11-08 | 2023-07-25 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US10694191B2 (en) | 2011-11-08 | 2020-06-23 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US9716890B2 (en) | 2011-11-08 | 2017-07-25 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| RU2632157C2 (ru) * | 2011-11-08 | 2017-10-02 | Электроникс Энд Телекоммьюникейшнз Рисерч Инститьют | Способ и устройство для совместного использования списка кандидатов |
| US10863181B2 (en) | 2011-11-08 | 2020-12-08 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| RU2632158C2 (ru) * | 2011-11-08 | 2017-10-02 | Электроникс Энд Телекоммьюникейшнз Рисерч Инститьют | Способ и устройство для совместного использования списка кандидатов |
| US10536706B2 (en) | 2011-11-08 | 2020-01-14 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US9621903B2 (en) | 2011-11-08 | 2017-04-11 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US10805612B2 (en) | 2011-11-08 | 2020-10-13 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US11206411B2 (en) | 2011-11-08 | 2021-12-21 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US10038907B2 (en) | 2011-11-08 | 2018-07-31 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| RU2575419C2 (ru) * | 2011-11-08 | 2016-02-20 | Электроникс Энд Телекоммьюникейшнз Рисерч Инститьют | Способ и устройство для совместного использования списка кандидатов |
| RU2632155C1 (ru) * | 2011-11-08 | 2017-10-02 | Электроникс Энд Телекоммьюникейшнз Рисерч Инститьют | Способ и устройство для совместного использования списка кандидатов |
| US10326999B2 (en) | 2011-11-08 | 2019-06-18 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US10341666B2 (en) | 2011-11-08 | 2019-07-02 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US10326998B2 (en) | 2011-11-08 | 2019-06-18 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US9854249B2 (en) | 2011-11-08 | 2017-12-26 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| US9621910B2 (en) | 2011-11-08 | 2017-04-11 | Electronics And Telecommunications Research Institute | Method and device for sharing a candidate list |
| RU2632154C1 (ru) * | 2011-11-08 | 2017-10-02 | Электроникс Энд Телекоммьюникейшнз Рисерч Инститьют | Способ и устройство для совместного использования списка кандидатов |
| RU2658146C9 (ru) * | 2012-04-12 | 2018-12-12 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство декодирования движущегося изображения и способ декодирования движущегося изображения |
| RU2682368C1 (ru) * | 2012-04-12 | 2019-03-19 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство кодирования движущегося изображения и способ кодирования движущегося изображения |
| RU2682368C9 (ru) * | 2012-04-12 | 2019-10-01 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство кодирования движущегося изображения и способ кодирования движущегося изображения |
| RU2617920C9 (ru) * | 2012-04-12 | 2017-08-29 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство кодирования движущегося изображения, способ кодирования движущегося изображения и программа кодирования движущегося изображения, а также устройство декодирования движущегося изображения, способ декодирования движущегося изображения и программа декодирования движущегося изображения |
| RU2658146C1 (ru) * | 2012-04-12 | 2018-06-19 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство декодирования движущегося изображения и способ декодирования движущегося изображения |
| RU2617920C2 (ru) * | 2012-04-12 | 2017-04-28 | ДжейВиСи КЕНВУД КОРПОРЕЙШН | Устройство кодирования движущегося изображения, способ кодирования движущегося изображения и программа кодирования движущегося изображения, а также устройство декодирования движущегося изображения, способ декодирования движущегося изображения и программа декодирования движущегося изображения |
| US11330284B2 (en) | 2015-03-27 | 2022-05-10 | Qualcomm Incorporated | Deriving motion information for sub-blocks in video coding |
| RU2705428C2 (ru) * | 2015-03-27 | 2019-11-07 | Квэлкомм Инкорпорейтед | Вывод информации движения для подблоков при видеокодировании |
| US10958927B2 (en) | 2015-03-27 | 2021-03-23 | Qualcomm Incorporated | Motion information derivation mode determination in video coding |
Also Published As
| Publication number | Publication date |
|---|---|
| US20150016527A1 (en) | 2015-01-15 |
| CA2430460A1 (en) | 2003-12-03 |
| KR100958499B1 (ko) | 2010-05-17 |
| US10116959B2 (en) | 2018-10-30 |
| AU2003204477A1 (en) | 2004-01-08 |
| JP4733341B2 (ja) | 2011-07-27 |
| CN1471320A (zh) | 2004-01-28 |
| JP2004040785A (ja) | 2004-02-05 |
| US9571854B2 (en) | 2017-02-14 |
| US20040001546A1 (en) | 2004-01-01 |
| US20130148737A1 (en) | 2013-06-13 |
| CN100455018C (zh) | 2009-01-21 |
| CA2430460C (en) | 2013-05-21 |
| US11575934B2 (en) | 2023-02-07 |
| US10694208B2 (en) | 2020-06-23 |
| MXPA03004906A (es) | 2004-10-15 |
| US9185427B2 (en) | 2015-11-10 |
| KR20030094086A (ko) | 2003-12-11 |
| US20190045216A1 (en) | 2019-02-07 |
| US20070014358A1 (en) | 2007-01-18 |
| AU2003204477B2 (en) | 2009-03-12 |
| US20160134890A1 (en) | 2016-05-12 |
| US8873630B2 (en) | 2014-10-28 |
| EP1369820A2 (en) | 2003-12-10 |
| US20170118488A1 (en) | 2017-04-27 |
| EP1369820A3 (en) | 2004-03-03 |
| BR0302164A (pt) | 2004-09-08 |
| US11277636B2 (en) | 2022-03-15 |
| US8374245B2 (en) | 2013-02-12 |
| US20220167006A1 (en) | 2022-05-26 |
| US20200275123A1 (en) | 2020-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2310231C2 (ru) | Пространственно-временное прогнозирование для двунаправлено прогнозируемых (в) изображений и прогнозирование вектора движения для компенсации движения множественных изображений с помощью эталона | |
| US10708582B2 (en) | Video coding | |
| JP3863510B2 (ja) | 動きベクトル符号化/復号化方法及びその装置 | |
| US20110013697A1 (en) | Motion vector prediction method, and apparatus and method for encoding and decoding image using the same | |
| JP4527677B2 (ja) | 動画像符号化方法、動画像符号化装置、動画像符号化プログラム | |
| JP5328854B2 (ja) | 動きベクトル検出装置及び動きベクトル検出方法 | |
| JP2007329693A (ja) | 画像符号化装置、及び画像符号化方法 | |
| JP2008067353A (ja) | 動きベクトル検出装置及び動きベクトル検出方法 | |
| JP2014143650A (ja) | 動画像符号化装置、動画像符号化方法及び動画像復号装置ならびに動画像復号方法 | |
| JP2004032355A (ja) | 動画像符号化方法,動画像復号方法,動画像符号化装置および動画像復号装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20150526 |