本出願は、2018年01月24日に出願された「デジタルPCR定量検出法」という第201810070377.2号、及び、2018年08月06日に出願された「流体駆動機構及び流体駆動方法」という第201810884995.0号の中国特許出願を優先権として主張し、それらのすべてをここで参照として援用する。
以下では、本出願の実施例の添付図面を参照しながら、本出願の実施例の技術的解決手段を明確かつ完全に説明する。当然のことながら、ここで説明する実施例は、本願の実施例の全てでなく一部にすぎない。当業者にとって創造的な労働をしないで本願の実施例に基づいて得られる全ての他の実施例も、本願の保護範囲に含まれるべきである。
本出願の目的、態様及び利点をさらに明らかにするために、以下に、実施例及び図面を参照しながら、本出願をさらに詳細に説明する。ここで述べた具体的な実施例は本出願を限定するためのものではなく、本出願を説明するために用いられることを理解されるべきである。
図1を参照すると、一実施例において、本出願が提供するデジタルPCR検出器1は、微小液滴生成装置10と、温度制御装置20と、蛍光信号検出装置30と、定量解析装置40と、制御器50とを含む。前記微小液滴生成装置10は、核酸増幅反応液を微滴化し、複数の微小液滴を形成するために用いられる。前記温度制御装置20は、前記微小液滴生成装置10にレールを介して接続され、前記複数の微小液滴を前記温度制御装置20に移転し、温度の循環で核酸を増幅するために用いられる。前記蛍光信号検出装置30は、前記温度制御装置20と対向配置され、核酸増幅された前記複数の微小液滴を撮影して検出するために用いられる。前記定量解析装置40は、前記蛍光信号検出装置30にデータ線を介して接続され、前記複数の微小液滴の蛍光情報を送信して定量解析を行うために用いられる。前記制御器50は、前記微小液滴生成装置10、前記温度制御装置20、蛍光信号検出装置30及び定量解析装置40にそれぞれ接続され、前記微小液滴生成装置10、前記温度制御装置20、蛍光信号検出装置30及び定量解析装置40を制御するために用いられる。
前記デジタルPCR検出器1は、前記微小液滴生成装置10、前記温度制御装置20、前記蛍光信号検出装置30及び前記定量解析装置40を集積化するため、操作員の自動の操作を実現することができる。前記デジタルPCR検出器1は、比較的高い作業効率を有している。
前記デジタルPCR検出器1が稼働している時に、前記微小液滴生成装置10は、前記検出すべき核酸増幅反応液を微滴化し、複数の微小液滴を形成することができる。前記温度制御装置20は、前記複数の微小液滴に核酸を増幅する。前記蛍光信号検出装置30は、前記複数の微小液滴に、蛍光変化のイメージをリアルタイムで撮影する。前記複数の微小液滴に係る変化する蛍光のイメージに基づいて、前記複数の微小液滴に変化する蛍光曲線を取得することができる。前記変化する蛍光曲線により、前記複数の微小液滴のCt値を取得し、Ct値と初期コピー数との関係に基づいて、初期DNAの濃度を定量解析することができる。ただし、Ct値とは、各微小液滴の蛍光信号が所定閾値になるまで経過された巡回数である。
前記温度制御装置20は、前記複数の微小液滴を核酸増幅反応させ、前記蛍光信号検出装置30により、核酸増幅反応された前記複数の微小液滴の産物の信号(例えば、蛍光、紫外線吸収や濁度などの信号)を採集する。前記複数の増幅された微小液滴と増幅されなかった微小液滴との構成の相違により、標的配列増幅が得られた液滴の数を解析して、核酸分子への定量解析を最終的に実現ことができる。前記複数の微小液滴に係る変化する蛍光のイメージをリアルタイムでモニターすることにより、検出結果に直接性を持っているため、前記複数の微小液滴における偽陽性と偽陰性という問題を解決することができる。
前記デジタルPCR検出器1は、前記微小液滴生成装置10、前記温度制御装置20、前記蛍光信号検出装置30及び前記定量解析装置40を集積化するため、前記操作員の自動の操作を実現するだけでなく、作業効率が高まり、反応が急速となり、再度利用性がよく、感度が高く、特異性が強く、また、結果が明確であるという利点を持っている。
現在、医学臨床検査、ナノ材料製造、食料品と環境検査、及び、生化学解析などの応用分野では、微量液体に対する精密な操作が幅広く求められている。微量液体を操作するコア技術の一つは、マイクロリットルレベルの液体を、さらに、ナノリットル、ひいては、ピコリットルの体積のマイクロ反応システムに分けるということである。マイクロ反応システムの生成に係る一つの主な技術分野は、乳化された微小液滴を生成するということである。
近年、例えば、膜乳化法、噴霧乳化法、マイクロ流体制御チップ法及び液体吐出ピペットチップ注射/噴射法などの様々な微小液滴生成の技術が文献に記載されている。しかしながら、液体吐出ピペットチップにより乳化微小液滴を生成する方法は、実際の適用に、ある程度の欠点が存在している。気液相の界面に変換する際に、微量液体の界面エネルギー及び流体のせん断力により、液体吐出ピペットチップの出口における液体の表面張力及び付着力に打ち勝ち、液体吐出ピペットチップの管口から流出された液滴を順調に液体吐出ピペットチップから脱離して、寸法が制御可能な液滴を非相溶性の液体に形成するという方法がある。しかしながら、この方法によれば、液体吐出ピペットチップを液面の上下でせん断運動することが必要となり、しかも、液面に対する液体吐出ピペットチップの初期及び終点の位置を高精度で位置づけることも必要となる。プロジェクトでの実現からみれば、それがかなり難しい。上記の方法は、液体吐出ピペットチップが液相を急速に繰り返して入出している工程において、不安定な定常波が液相の表面に容易に形成され、微小液滴の生成の速さが制限されてしまう。また、液体吐出ピペットチップが液体に円運動又はらせん運動で均一な速度にて生成したせん断力により、注入された非相溶性の液体をせん断して液滴を形成するという方法も存在している。しかしながら、この方法によれば、液体吐出ピペットチップにより発生された液滴の寸法は、各種のシステムの要素変化により与えられた影響(例えば、液体の粘度、環境温度、運動速度、運動軌跡など)が比較的大きいことから、誤差が生じるおそれがある。また、この誤差は、発生した液滴は、数が増えるに伴い、累積されるため、多量で生成された液滴の体積にその均一性を制御することはかなり難しい。
このことに鑑みて、従来の微小液滴生成方法及び装置により微小液滴を生成する工程に存在し、微小液滴の生成の速さが遅く、生成された微小液滴の体積にその均一性への制御がかなり難しいという課題について、微小液滴を急速に生成できしかも体積の均一性が高い、微小液滴の生成方法及び装置を提供するニーズがある。
図2を参照すると、一実施例において、前記微小液滴生成装置10は、液体吐出ピペットチップ110、流体駆動機構120、運動制御機構130及び第一の制御器170を含む。前記液体吐出ピペットチップ110は、出口端及び入口端を有し、第一の液体を貯留するために用いられる。微小液滴生成装置10は、微小液滴の容器と協働して使用される。前記微小液滴容器には、第二の液体が貯留されており、前記液体吐出ピペットチップ110の出口端は、前記第二の液体の液面下に挿入される。
前記第一の液体及び前記第二の液体は、互いに非相溶性を持ち又は界面反応を有する。第一の液体及び第二の液体は、互いに非相溶性を持つ任意の二つの液体とされてもよい。本出願の一実施例では、前記第一の液体が水溶液であり、前記第二の液体が、例えば、鉱油(テトラデカンなどを含む)、植物油、シリコーンオイル又はパーフルオロアルカンオイルなどの水と互いに非相溶性を持つ油性液体であり、生成された液滴は、水溶液の液滴である。又は、前記第一の液体は、例えば、テトラデカン及びn-ヘキサンなどの有機相の鉱油であり、前記第二の液体は、鉱油と非相溶性を持つパーフルオロアルカンオイルである。前記第一の液体及び第二の液体は、互いに非相溶性を持つ水性二相であってもよい。本出願の他の実施例では、前記第一の液体が水溶液であり、前記第二の液体が水と互い非相溶性を持つ水性液体であってもよい。例えば、第一の液体がデキストラン溶液であり、第二の液体がポリエチレングリコール(PEG)の水溶液であり、生成された液滴がデキストランの溶液の液滴である。
前記第一の液体及び第二の液体は、界面反応を有する二つの液体とされてもよい。本出願の一実施例では、前記第一の液体がアルギン酸ナトリウムの水溶液であり、前記第二の液体が、例えば、質量濃度が1%の酸化カルシウム水溶液であり、両者に界面反応が存在し、生成された液滴がゲル状のアルギン酸カルシウム微小球である。本出願は、液体吐出ピペットチップ又は液体吐出ピペットチップから流出する第一の液体の成分を交換することにより、開口の容器に複数の異なる成分や体積の液滴を順次に形成することができ、バッチ生産でも、微小の体積かつハイスループットのスクリーニングを実現することができ、しかも、多段階にて超微量の生化学反応及びモニターを実現することができ、幅広い応用の見通しが存在している。
前記流体駆動機構120は、前記液体吐出ピペットチップ110の入口端に接続され、前記液体吐出ピペットチップ110の内部に貯留されている前記第一の液体を前記液体吐出ピペットチップ110の出口端から排出するために用いられる。前記運動制御機構130は、前記液体吐出ピペットチップ110の出口端と前記第二の液体との間に、所定軌跡、所定速度又は所定加速度で対向運動を行い、前記液体吐出ピペットチップ110の出口端から排出された第一の液体が表面張力及び前記第一の液体に対する前記液体吐出ピペットチップ110の付着力に打ち勝ち、微小液滴を形成するように制御するために用いられる。前記第一の制御器170は、前記流体駆動機構120及び前記運動制御機構130にそれぞれ接続され、前記流体駆動機構120及び前記運動制御機構130が協働して稼働するように制御するために用いられる。
例えば、膜乳化法、噴霧乳化法、マイクロ流体制御チップ法及び液体吐出ピペットチップ注射/噴射法などの様々な微小液滴生成の技術が文献に記載されている。そのうち、液体吐出ピペットチップ注射/噴射法は、最新の微小液滴生成技術として、微小液滴の生成及び消耗品としてのコストの削減の側面に優れた応用の見通しを持っている。従来の液体吐出ピペットチップ注射/噴射法によれば、微小液滴を生成するように、液体吐出ピペットチップを液面の上下でせん断して運動させることが必要となる。しかしながら、この方法によれば、不安定な定常波が形成され、微小液滴の生成工程が不安定となってしまうおそれがある。
このことに鑑み、従来の液体吐出ピペットチップ注射/噴射法に存在している、微小液滴の生成工程が不安定となってしまうという課題について、微小液滴の生成工程を安定的にする微小液滴生成方法を提供するニーズが存在している。
図3に示されるように、本出願の一実施例では、運動制御機構130の連動により、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に瞬間加速度運動を含む運動を行うことができ、ただし、その加速度をa
1とする。第一の液体は、液体吐出ピペットチップ110の出口端112から排出されると、液体吐出ピペットチップ110の出口端112に付着された液滴195を形成する。液滴195は、液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行う瞬間に、液体吐出ピペットチップ110の出口端112から脱離され、微小液滴を形成する。微小液滴が液体吐出ピペットチップ110の出口端112から脱離されるまで受けられた作用力は、それぞれ、重力G、第二の液体の浮力f
1、第二の液体の粘性抵抗f
2、及び、液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f
3である。微小液滴について、液体吐出ピペットチップ110の出口端112から脱離されるまでその質量をmとし、その加速度をa
2とすると、ニュートンの運動の第二法則によれば、
が得られる。
液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f
3は、液体吐出ピペットチップ110の表面自由エネルギー、液滴195の表面張力及び液体吐出ピペットチップ110の幾何学的寸法に関連されている。液体吐出ピペットチップ110の出口端112が瞬間加速度運動をしている時に、液滴195に対する液体吐出ピペットチップ110の出口端112の付着力の方向と加速度の方向とは同じである。液体吐出ピペットチップ110の出口端112に付着された液滴195を球状として簡略化する。ストークス(Stokes)の式によると、わかるように、第二の液体中を運動するときに受けられた液滴195の粘性抵抗がf
2=6πηrvとなり、そのうち、ηが第二の液体の粘性係数であり、rが液滴195の半径であり、vが液滴195の運動速度である。液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行うまで、液滴195の速度がゼロであったことから、液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行う瞬間に、第二の液体に受けられた液滴195の粘性抵抗f
2がゼロであり、又は、極めて小さい。微小液滴を生成する工程では、一般的に、液滴195の直径がピコリットルからマイクロリットルまでのオーダーであり、液滴195の重力Gと第二の液体の浮力f
1とは、それらの方向が反対である。従って、液滴195の重力Gと第二の液体の浮力f
1とのベクトルの和がほぼゼロになる。
運動制御機構130は、液体吐出ピペットチップ110の出口端112の瞬間加速度を正確に制御することができる。そして、液体吐出ピペットチップ110の出口端112の各瞬間加速度を比較的大きく制御することにより、液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行うと、液滴195を効果的に生成することができる。
このことに鑑み、本出願は、出口端112を有し第一の液体を貯留している液体吐出ピペットチップ110を提供し、開口を有し第二の液体を貯留している微小液滴容器を提供し、第一の液体と第二の液体とは、互いに非相溶性を持ち、又は、界面反応を有する任意の二つの液体とされるステップS201と、液体吐出ピペットチップ110の出口端112を微小液滴容器の開口から第二の液体の液面下に挿入するステップS202と、液体吐出ピペットチップ110の出口端112に、第二の液体の液面下に瞬間加速度運動を含む運動を行わせながら、第一の液体を液体吐出ピペットチップ110の出口端112から排出し、液体吐出ピペットチップ110の出口端112から排出された第一の液体は、液体吐出ピペットチップ110の出口端112に付着される液滴195を形成し、液滴195は、液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行っている工程において、液体吐出ピペットチップ110の出口端112から脱離され、第二の液体の液面下に微小液滴を形成するステップS203と、を含む微小液滴生成方法をさらに提供する。
上記の微小液滴生成方法によれば、前記液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行う時に、加速度が比較的大きい。そして、前記液体吐出ピペットチップ110の出口端112に付着された液滴195と前記液体吐出ピペットチップ110の出口端112との付着力は、液滴195と前記液体吐出ピペットチップ110の出口端112とを同期に加速して連動するために十分でないことから、前記液体吐出ピペットチップ110の出口端112に付着された液滴195は、前記液体吐出ピペットチップ110の出口端112から脱離され、第二の液体の液面下に微小液滴を形成する。
本出願が提供する微小液滴生成方法によれば、前記液体吐出ピペットチップ110の出口端112が第二の液体の液面下に瞬間加速度運動を行っている時に微小液滴を生成することから、前記液体吐出ピペットチップ110の出口端112が運動している時に第二の液体に与えた干渉を減少し、微小液滴を生成する工程に安定性を確保することができる。
選択的に、ステップS203では、第一の液体を液体吐出ピペットチップ110の出口端112から排出する方式は、連続排出又は間欠排出であってもよい。具体的な排出方式は、実際の状況に応じて相応しい設計がされてもよい。本実施例では、ステップS203に、液体吐出ピペットチップ110の出口端112の各瞬間加速度運動を十分に使用して微小液滴を形成するように、第一の液体を液体吐出ピペットチップ110の出口端112から連続排出する。一実施例では、ステップS203に、第一の液体を液体吐出ピペットチップ110の出口端112から一定の流速で排出することは、同じ時間間隔において、液体吐出ピペットチップ110の出口端112から排出される第一の液体の体積が常に同じであるということを意味している。第一の液体を液体吐出ピペットチップ110の出口端112から一定の流速で排出することは、液体吐出ピペットチップ110の出口端112の運動を制御することにより、微小液滴を生成する制御に役立つことができる。
本出願の一実施例では、ステップS203に、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に瞬間加速度運動を含む周期的な運動を行う。液体吐出ピペットチップ110の出口端112が第二の液体の液面下に周期的な運動を行うことは、液体吐出ピペットチップ110の出口端112の変位、速度、及び、加速度のいずれも周期的に変化することを意味している。液体吐出ピペットチップ110の出口端112が瞬間加速度運動を含む周期的な運動を行いながら、第一の液体が液体吐出ピペットチップ110の出口端112から一定の流速で排出されるように協働して、微小液滴を等時間間隔で生成することを実現することができる。又は、第一の液体吐出液体吐出ピペットチップ110の出口端112の流速が変化しているものの、液体吐出ピペットチップ110の出口端112の一つの運動周期内において、第一の液体吐出液体吐出ピペットチップ110の出口端112の体積が同じく保持される。従って、液体吐出ピペットチップ110の出口端112が瞬間毎に加速度運動を行うまで、液滴195の体積を同じくすることにより、体積の一致する微小液滴を形成することを確保することができる。
液体吐出ピペットチップ110及び第一の液体が交換されない場合には、液体吐出ピペットチップ110の表面自由エネルギー、液体吐出ピペットチップ110の幾何学的寸法及び液滴195の表面張力が、液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f3に影響を与える二つの要素として、変化しない。従って、液体吐出ピペットチップ110及び第一の液体が交換されない場合には、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値 f3が、変化しない。第一の液体は、流体駆動機構120の連動により、均一な流速で液体吐出ピペットチップ110の出口端112から連続排出される。運動制御機構130は、液体吐出ピペットチップ110の出口端112が瞬間で加速度a1に従って加速度運動を行うタイミング及び瞬間の加速度a1を正確に制御することができる。流体駆動機構120及び運動制御機構130は、互いに協働すると、液滴195の体積が固定値になる瞬間で、液体吐出ピペットチップ110の出口端112が加速度a1に従って瞬間で加速度を行うように駆動して、体積の一致する微小液滴を形成することが実現されやすい。流体駆動機構120は、第一の液体を液体吐出ピペットチップ110の出口端112から均一かつ連続的に排出するように制御することができれば、運動制御機構130により、液体吐出ピペットチップ110の出口端112が等時間間隔に瞬間加速度運動を行うように駆動するということだけで、体積の一致する微小液滴を形成することができる。
複数の液体吐出ピペットチップ110により、同時又は順次に微小液滴を生成する際には、液体吐出ピペットチップ110の表面自由エネルギー及び液体吐出ピペットチップ110の幾何学的寸法が液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f3に影響を与える二つの要素として変化する。しかしながら、多量で加工される場合に、液体吐出ピペットチップ110の表面自由エネルギー及び液体吐出ピペットチップ110の幾何学的寸法が一定の区間に変化するように制御可能である。液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f3に影響を与えるもう一つの要素である液滴195の表面張力は、極めて小さい範囲で変化する。従って、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3は、極めて小さい区間にのみ波動する。流体駆動機構120は、第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から連続排出するように駆動することができる。運動制御機構130は、液体吐出ピペットチップ110の出口端112が瞬間の加速度a1運動を行うタイミング及び瞬間で加速度a1を正確に制御することができる。流体駆動機構120及び運動制御機構130は、互いに協働すると、液滴195の体積が固定値になる瞬間で、液体吐出ピペットチップ110の出口端112が加速度 a1に従って瞬間加速度運動を行うように駆動して、体積の一致する微小液滴を生成することが実現され易い。流体駆動機構120は、第一の液体を排出液体吐出ピペットチップ110の出口端112から均一かつ連続的に排出するように制御することができれば、運動制御機構130により、液体吐出ピペットチップ110の出口端112が等時間間隔に瞬間加速度運動を行うように駆動するということだけで、体積の一致する微小液滴を生成することができる。
流体駆動機構120は、第一の液体を均一な速度で液体吐出ピペットチップ110の出口端112から排出しながら、運動制御機構130と協働して、液滴195の体積が所定値になる瞬間で加速度が比較的大きい瞬間加速度運動を行わせるようにする。
本出願が提供する微小液滴生成方法は、同じ液体吐出ピペットチップ110により、体積が均一な液滴195を生成するということを確保することができるだけでなく、複数の液体吐出ピペットチップ110により、同時又は順次に生成された微小液滴の体積が均一であるということも確保することができる。本実施例が提供する微小液滴生成方法は、微小液滴の体積が均一であることを確保することができ、複数の液体吐出ピペットチップ110により微小液滴を同時に生成し微小液滴を生成する効率を高めることもできる。
さらに、運動制御機構130の制御によれば、液体吐出ピペットチップ110の出口端112の一つの運動周期に、複数の瞬間加速度運動が含まれており、複数の瞬間加速度運動について、それらの加速度が同じであり、しかも、それらのタイミングにより、液体吐出ピペットチップ110の出口端112の一つの運動周期が平均して分けられる。液体吐出ピペットチップ110の出口端112の運動の一つの周期に、複数の瞬間加速度運動が含まれることは、液体吐出ピペットチップ110の出口端112が一つの運動周期内に複数の微小液滴を生成することに役立つ。好ましくは、ステップS203では、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に運動している軌跡に、直線セグメント、円弧セグメント、多角形形状などの複数の種類の軌跡のうちの一つ又は複数の組み合わせが含まれる。一つの実施可能な形態としては、液体吐出ピペットチップ110の出口端112の一つの運動周期に二つの瞬間加速度運動が含まれる場合に、液体吐出ピペットチップ110の運動軌跡が直線又は円弧のものである。液体吐出ピペットチップ110の出口端112の一つの運動周期に、二つ以上の瞬間加速度運動が含まれる場合に、液体吐出ピペットチップ110の出口端112が第二の液体に、正三角形、正方形、正五角形や正六角形などを含む正多角形の形状で軌跡を行う。
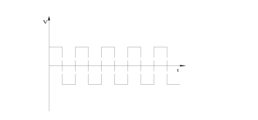
一つの実施可能な形態としては、ステップS203では、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に周期的に運動する工程に、液体吐出ピペットチップ110の出口端112の速度が長方形波状に変化する。液体吐出ピペットチップ110の出口端112の速度が長方形波状に変化し、加速段階が終わった直後に均一な速度の段階に移行することは、運動制御機構130により液体吐出ピペットチップ110の出口端112の運動状態を正確に制御することに役立つ。好ましくは、液体吐出ピペットチップ110の出口端112による運動速度の変化の長方形波状を示すハイレベルタイミング及びローレベルタイミングは、同等でもよく相違でもよい。さらに、ステップS203では、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に周期的に運動する工程に、液体吐出ピペットチップ110の出口端112の速度が方形波状に変化する。液体吐出ピペットチップ110の出口端112による運動速度の変化の長方形波状を示すハイレベルタイミングとローレベルタイミングとは、等しい。液体吐出ピペットチップ110の出口端112による運動速度の変化を示す長方形波状がローレベルにある場合に、液体吐出ピペットチップ110の出口端112は、その速度がセロとなり、又は、ハイレベルにある方向と反対方向の速度を有する。図4に示されるように、さらに、前記液体吐出ピペットチップ110の出口端112が周期的に運動している周期の前半及び後半において、前記液体吐出ピペットチップ110の出口端112の速度は、その大きさが同じであり、かつ方向が反対している。液体吐出ピペットチップ110の出口端112の一つの運動周期には、二つの反対方向の瞬間加速度運動が含まれる。
本実施例では、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に運動している軌跡は、直線セグメントである。液体吐出ピペットチップ110の出口端112は、直線セグメントの一方の端点から瞬間加速度運動を行い、直線セグメントの他方の端点から反対方向に瞬間加速度運動を行う。二つの瞬間加速度運動の加速度は、いずれもa1である。他の実施例では、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に運動している軌跡は、円弧セグメント又は多角形形状である。さらに、ステップS203では、液体吐出ピペットチップ110の出口端112が第二の液体の液面下に周期的に運動する周波数は、0.1Hz~200Hzの範囲にあることから、プロジェクトでは実現され易い。
図4及び図5に示されるように、本出願に係る一つの具体的な実施例では、流体駆動機構120は、第一の液体を一定の流速で液体吐出ピペットチップ110の出口端112から排出するように制御する。運動制御機構130は、液体吐出ピペットチップ110の出力端が、直線状に運動する軌跡或いは方形波状に変化する速度で周期的に運動するように制御する。液体吐出ピペットチップ110の出口端112の速度方向が変更されると、液体吐出ピペットチップ110の出口端112は瞬間加速度が最大値になる。液体吐出ピペットチップ110の出口端112に付着された液滴195も、液体吐出ピペットチップ110の出口端112に瞬間加速度が最大値になる時に、液体吐出ピペットチップ110の出口端112から脱離され、微小液滴199を形成する。第一の液体が一定流速で液体吐出ピペットチップ110の出口端112から排出されることから、液滴195が液体吐出ピペットチップ110の出口端112から脱落したときに、新たな液滴195が生成状態に移行する。液体吐出ピペットチップ110の出口端112が再度、反対方向に加速すると、新しく生成された液滴195も液体吐出ピペットチップ110の出口端112から脱落されて新たな微小液滴199を形成する。
本実施例では、液体吐出ピペットチップ110の出口端112が一つの運動周期に二つの微小液滴199を生成可能であり、しかも、方形波状がプロジェクトで実現され易い。他の実施例では、液体吐出ピペットチップ110の出口端112が一つの運動周期に一つの微小液滴199を生成する。実施例において、液体吐出ピペットチップ110の出口端112は、第二の液体699に、任意方向に沿って直線状の軌跡で、速度が方形波状で変化する運動を行うことが好ましい。この運動には、液体吐出ピペットチップ110の延在方向と垂直する平面に直線状の軌跡で速度が方形波状で変化する運動、液体吐出ピペットチップ110の延在方向と任意角度をなす平面に直線状の軌跡で速度が方形波状で変化する運動、及び、液体吐出ピペットチップ110の延在方向に沿って直線状の軌跡で速度が方形波状で変化する運動などが含まれる。本出願に係る他の実施例では、液体吐出ピペットチップ110の出口端112の運動軌跡が円弧セグメント又は多角形形状である場合に、液体吐出ピペットチップ110の出口端112が第二の液体699に任意方向に沿って円弧セグメント又は多角形形状の軌跡で速度が方形波状で変化する運動を行う。この運動には、液体吐出ピペットチップ110の延在方向と垂直する平面に円弧セグメント又は多角形形状の軌跡で速度が方形波状で変化する運動、液体吐出ピペットチップ110の延在方向と任意角度をなす平面に直線状の軌跡で方形波状となる運動、及び、液体吐出ピペットチップ110の延在方向に沿って速度が方形波状で変化する軌跡による運動などが含まれる。
本出願に係る他の実施例では、運動制御機構130の連動により、液体吐出ピペットチップ110の出口端112は、第二の液体の液面下に周期的に変化する速度で運動を行い、速度が変化している周期の前半及び後半において、液体吐出ピペットチップ110の出口端112の速度が共に単調変化している。単調変化しているとは、速度が変化している周期の前半及び後半において、液体吐出ピペットチップ110の出口端112の次の時刻の速度が常に先の時刻の速度以上又は以下であることを意味している。例えば、速度が変化している周期の前半に、液体吐出ピペットチップ110の出口端112の速度が持続的に増加し、或いは、一部分の速度が持続的に増加して一部分の速度が変化しない。一方、速度が変化している周期の後半において、液体吐出ピペットチップ110の出口端112の速度が持続的に減少し、又は、一部分の速度が持続的に減少して一部分の速度が変化しない。第一の液体は、液体吐出ピペットチップ110の出口端112から排出され、液体吐出ピペットチップ110の出口端112に付着される液滴195を形成する。液滴195は、液体吐出ピペットチップ110の出口端112の運動速度がある大きさになると、液体吐出ピペットチップ110の出口端112から脱離され、微小液滴199を形成する。図6に示されるように、微小液滴199が液体吐出ピペットチップ110の出口端112から脱離されるまで、受けられた作用力は、それぞれ、重力G、第二の液体699の浮力f
1、第二の液体699の粘性抵抗f
2、及び、液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f
3である。微小液滴199について、液体吐出ピペットチップ110の出口端112から脱離されるまでの質量をmとし、速度をvとし、加速度をa
2とすると、液滴195は、第二の液体699の運動工程において、粘性力f
2、重力G、浮力f
1及び付着力f
3による相乗効果により受けられており、
液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f
3は、液体吐出ピペットチップ110の表面自由エネルギー、液滴195の表面張力、及び、液体吐出ピペットチップ110の幾何学的寸法に関連されている。液体吐出ピペットチップ110の出口端112に付着された液滴195を球状として簡略化する。ストークス(Stokes)の式によると、わかるように、第二の液体699中を運動するときに受けられた液滴195の粘性抵抗がf
2=6πηrvとなり、そのうち、ηが第二の液体699の粘性係数であり、rが液滴195の半径であり、vが液滴195の運動速度である。微小液滴199を生成する工程において、一般的に、液滴195の直径範囲は、ピコリットルからマイクロリットルまでのオーダーであり、第二の液体699の粘性係数は、一般的に、比較的大きい。
このことに鑑み、本出願が提供する微小液滴生成方法は、出口端112を有し、第一の液体を貯留している液体吐出ピペットチップ110を提供し、開口を有し、第二の液体699を貯留している微小液滴容器60を提供し、第一の液体と第二の液体699とは、互いに非相溶性を持ち又は界面反応を有する任意の二つの液体とされるステップS211と、液体吐出ピペットチップ110の出口端112を、微小液滴容器60の開口から第二の液体699の液面下に挿入するステップS212と、液体吐出ピペットチップ110の出口端112に、第二の液体699の液面下に速度が周期変化する運動を行わせ、速度が変化している周期の前半及び後半において、液体吐出ピペットチップ110の出口端112の速度が共に単調変化しながら、第一の液体を液体吐出ピペットチップ110の出口端112から均一な速度で排出し、液体吐出ピペットチップ110の出口端112から排出された第一の液体は、液体吐出ピペットチップ110の出口端112に付着された液滴195を形成し、液滴195は、液体吐出ピペットチップ110の出口端112が運動している工程に、液体吐出ピペットチップ110の出口端112から脱離され、第二の液体699の液面下に微小液滴199を形成するステップS213と、を含む。
上記の微小液滴生成方法によれば、液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に周期的に変化する速度で運動を行い、速度が変化している周期の前半及び後半において、液体吐出ピペットチップ110の出口端112の速度が共に単調変化する。運動の工程では、液滴195に対する第二の液体699の粘性力f2も、液体吐出ピペットチップ110の出口端112の速度が周期的に変化するのに伴い周期的に変化する。液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f3が液滴195に対する第二の液体699の粘性力 f2よりも小さいと、液滴195が液体吐出ピペットチップ110の出口端112と同期に運動することができなくなり、前記液体吐出ピペットチップ110の出口端112に付着された液滴195が前記液体吐出ピペットチップ110の出口端112から脱離され、第二の液体699の液面下に微小液滴199を形成する。
本出願が提供する微小液滴生成方法は、前記液体吐出ピペットチップ110の出口端112が第二の液体699の液面下に周期的に変化する速度で運動を行い、微小液滴199を生成することにより、前記液体吐出ピペットチップ110の出口端112が運動している時に第二の液体699に与える干渉を減少し、微小液滴199を生成する工程に安定性を確保することができる。
本実施例では、ステップS213に、第一の液体が液体吐出ピペットチップ110の出口端112から連続して排出される。さらに、ステップS213に、第一の液体が液体吐出ピペットチップ110の出口端112から一定の流速で排出される。このことは、等時間間隔に、液体吐出ピペットチップ110の出口端112から排出された第一の液体の体積が常に同じであることを意味している。第一の液体が液体吐出ピペットチップ110の出口端112から一定の流速で排出されると、液体吐出ピペットチップ110の出口端112が周期的に運動するように制御することにより、体積の一致する微小液滴199を生成することに役立つ。
第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2に影響を与える要素には、液滴195の運動速度vのほうが制御されやすい。液滴195は、液体吐出ピペットチップ110の出口端112から脱離され微小液滴199を形成するまで、液体吐出ピペットチップ110の出口端112と同期に運動することが保持される。従って、液体吐出ピペットチップ110の出口端112の運動速度を制御することにより、液滴195の運動速度vを正確に制御することができる。第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御すると、液滴195の半径rが一定の時間間隔に周期的に変化する。第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2に影響を与える要素には、第二の液体699の粘性係数ηが、使用される工程において、ある範囲で変化するものの、第二の液体699の粘性係数ηの変化する範囲は極めて小さい。
液体吐出ピペットチップ110及び第一の液体が交換されない場合に、液体吐出ピペットチップ110の表面自由エネルギー、液体吐出ピペットチップ110の幾何学的寸法、及び、液滴195の表面張力は、液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力 f3に影響を与える二つの要素として、変化しない。従って、液体吐出ピペットチップ110及び第一の液体が交換されない場合に、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値 f3が変化しない。複数の液体吐出ピペットチップ110により同時又は順次に微小液滴199を生成すると、液体吐出ピペットチップ110の表面自由エネルギー及び液体吐出ピペットチップ110の幾何学的寸法は、液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力 f3に影響を与える二つの要素として、変化する。しかしながら、多量で加工される場合に、液体吐出ピペットチップ110の表面自由エネルギー及び液体吐出ピペットチップ110の幾何学的寸法が一定の区間に変化するように制御可能である。液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力 f3に影響を与えるもう一つの要素である液滴195の表面張力は、極めて小さい範囲でのみ変化する。液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値 f3は、極めて小さい区間にのみ波動する。
従って、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2が液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値 f3の区間値よりも大きいように制御できればよい。同じバッチで微小液滴199を生成する工程には、液滴195の半径rが必ず変化しない。一旦、試験用のパラメータが確定されると、液滴195の半径rも、それに伴い、確定された。液体吐出ピペットチップ110の出口端112が第二の液体699の液面下に運動する速度は、変化する。液体吐出ピペットチップ110の出口端112が第二の液体699の液面下に運動する速度は、v>f3/6πηrが満たされているときに、液滴195が液体吐出ピペットチップ110の出口端112から脱離され、微小液滴199を形成する。
液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に周期的に変化する速度で運動を行う。第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御すると、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積も均一に増大する。一番目の微小液滴199が液体吐出ピペットチップ110の出口端112から落下したときの微小液滴199の半径は臨界半径と呼ばれ、微小液滴199の速度は臨界速度と呼ばれる。液体吐出ピペットチップ110の出口端112の運動周期、及び、液体吐出ピペットチップ110の出口端112から排出された第一の液体の流速を調整することにより、同じ時間間隔(液体吐出ピペットチップ110の出口端112の運動周期の倍数)が経過した後に、液体吐出ピペットチップ110の出口端112に付着される液滴195が同時に臨界半径及び臨界速度になり、新たな微小液滴199を形成する。第一の液体が均一な流速で液体吐出ピペットチップ110の出口端112から排出されることから、生成された微小液滴199の体積が同じくなる。
一つの実施可能な形態として、ステップS213に、速度が変化している一つの周期に、液体吐出ピペットチップ110の出口端112の速度が中間時点を中点として中心対称である。さらに、ステップS213に、第二の液体699の液面下に液体吐出ピペットチップ110の出口端112の加速度、速度及び運動軌跡がいずれも周期的に変化する。また、ステップS213に、第二の液体699の液面下に液体吐出ピペットチップ110の出口端112の速度が余弦曲線状に変化する。
選択的に、ステップS213には、液体吐出ピペットチップ110の出口端112が第二の液体699の液面下に運動している軌跡は、直線セグメント、円弧セグメント、多角形形状などの複数の種類の軌跡のうち一つ又は複数の組み合わせが含まれる。ステップS213には、液体吐出ピペットチップ110の出口端112が第二の液体699の液面下に周期的に運動する周波数が0.1Hz~200Hzの範囲にあることから、プロジェクトで実現され易い。
液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に円弧の軌跡で、又は、余弦状に変化する速度で周期的な運動を行うことを例として挙げると、このとき、液体吐出ピペットチップ110の出口端112は、実際に揺動するように運動し、運動変位が正弦波状の曲線で示される。図7における曲線aに示されるように、流体制御機構の駆動により、第一の液体が均一な流速で液体吐出ピペットチップ110の出口端112から排出される。仮に液滴195が液体吐出ピペットチップ110の出口端112から脱離されないとすると、計算により、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗fが、時間の経過に伴い、図7における曲線bとして示されている。第一の液体が均一な流速で液体吐出ピペットチップ110の出口端112から排出される初期の段階に、液滴195の体積が増大していくのに伴い、液滴195の半径rも明らかに増大している。液滴195の半径rが増大するのに伴い、液滴195の体積が均一な速度で増大していくことから、液滴195の半径rが緩く増大していくことが余儀無くされる。従って、液体吐出ピペットチップ110の出口端112が揺動する初期の複数の周期に、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2の最大値が急速に増加し、その後、緩く増加している。図7に示されるように、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2も液体吐出ピペットチップ110の出口端112の周期的な運動と類似する周期性が現れ、即ち、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2が液体吐出ピペットチップ110の出口端112の速度変化に伴い変化する。実際の状況では、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2が増大し、しかも、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値 f3よりも大きい場合に、液滴195が液体吐出ピペットチップ110の出口端112から脱落され、微小液滴199を形成する。
本出願の一実施例では、図8に示されるように、液体吐出ピペットチップ110の出口端112が、円弧の軌跡、または、正弦波状の変位で揺動するように制御する。液体吐出ピペットチップ110及び第一の液体が交換されない場合に、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値 f3が変化しない。液体吐出ピペットチップ110の出口端112に付着される液滴195の半径rが増大するのに伴い、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2も持続的に増大する。第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2が液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3よりも大きい瞬間に、液滴195が液体吐出ピペットチップ110の出口端112から脱落され、図8に示される液滴Iとなるように、微小液滴199を形成する。そして、次の微小液滴199を生成するサイクルへ移行する。
本実施例では、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値がf3=1.8x10-4Nとなり、液体吐出ピペットチップ110の出口端112の揺動周波数が50Hzである。液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動を行う二番目の周期の最後に、図8における液滴Iとなるように一番目の微小液滴199を生成する。二番目の微小液滴199を生成する初期段階に、液体吐出ピペットチップ110の出口端112の運動速度が僅かに減少するが、液体吐出ピペットチップ110の出口端112に付着された液滴195の半径rが速く増加していることから、第二の液体699に運動している時に受けられた液滴195の粘性抵抗f2が、直ぐに低下することなく、小さい範囲に増加する。そして、液滴195の半径rが緩く増加し、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2が、主に、液体吐出ピペットチップ110の出口端112の運動の速度変化に伴い、変化する。
第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御すると、液体吐出ピペットチップ110の出口端112が先の一つの微小液滴199を生成してからの二つの運動周期の時刻に、図8における液滴IIとなるように、先の一つの微小液滴199と等体積の新たな液滴195を生成する。しかも、この時の液体吐出ピペットチップ110の出口端112の運動速度も、先の二つの運動周期のほうと同じである。先の微小液滴199と等体積の新たな液滴195が液体吐出ピペットチップ110の出口端112から脱落される。第一の液体が均一な速度で排出されること、及び、液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動の両方により、生成された微小液滴199の体積の均一性を確保することができる。
本出願の一実施例では、図9に示されるように、液体吐出ピペットチップ110の出口端112が円弧の軌跡で、正弦波状に変位して揺動するように制御する。液体吐出ピペットチップ110及び第一の液体が交換されない場合に、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3が変化しない。液体吐出ピペットチップ110の出口端112に付着される液滴195の半径rが増大するのに伴い、第二の液体699に運動している時に受けられた液滴195の粘性抵抗f2も増大する。第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗 f2が液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値 f3よりも大きい瞬間に、液滴195が液体吐出ピペットチップ110の出口端112から脱落され、微小液滴199を形成する。そして、次の微小液滴199を生成するサイクルへ移行する。
本実施例では、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値がf3=1.5x10-4Nとなり、液体吐出ピペットチップ110の出口端112の揺動周波数が50Hzである。液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動を行う一番目の周期の最後に、図9における液滴Iとなるように、一番目の微小液滴199を生成する。二番目の微小液滴199を生成する初期の段階に、液体吐出ピペットチップ110の出口端112の運動速度が僅かに減少するが、液体吐出ピペットチップ110の出口端112に付着される液滴195の半径rが速く増加することから、第二の液体699の中を運動しているときに受けられた液滴195の粘性抵抗f2が直ぐに低下することなく、小さい範囲に増加する。そして、液滴195の半径rが緩く増加し、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2は、主に液体吐出ピペットチップ110の出口端112の運動の速度変化に伴い変化する。
第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御すると、液体吐出ピペットチップ110の出口端112が先の一つの微小液滴199を生成してから次の一つの運動周期の時刻に先の一つの微小液滴199と等体積の新たな液滴195を生成し、しかも、この時の液体吐出ピペットチップ110の出口端112の運動速度も先の一つの運動周期のほうと同じである。先の一つの微小液滴199と等体積の新たな液滴195が液体吐出ピペットチップ110の出口端112から脱落され、図9における液滴IIとなる。このように繰り返すと、液滴IIIと液滴IVなどが生成されることになる。第一の液体が均一な速度で排出されること、及び、液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動の両方は、生成された微小液滴199の体積の均一性を確保することができる。
本出願の一実施例では、図10及び図11に示されるように、液体吐出ピペットチップ110の出口端112が円弧の軌跡で、正弦波状に変位して揺動するように制御する。液体吐出ピペットチップ110及び第一の液体が交換されない場合に、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3が変化しない。液体吐出ピペットチップ110の出口端112に付着される液滴195の半径rが増大するのに伴い、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2も持続的に増大する。第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2が液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3よりも大きい瞬間に、液滴195が液体吐出ピペットチップ110の出口端112から脱落され、図10における液滴Iとなるように、微小液滴199を形成する。次の微小液滴199を生成するサイクルへ移行する。
本実施例では、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値がf3=1.0x10-4Nとなり、液体吐出ピペットチップ110の出口端112の揺動周波数が50Hzである。液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動の周期の前半の加速段階には、図10における液滴Iとなるように、一番目の微小液滴199を生成する。二番目の微小液滴199を生成する初期の段階に、液体吐出ピペットチップ110の出口端112の運動速度が僅かに減少するが、液体吐出ピペットチップ110の出口端112に付着される液滴195の半径rが速く増加することから、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2が直ぐに低下することなく、小範囲に増加する。そして、液滴195の半径rが緩く増加し、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2は、主に液体吐出ピペットチップ110の出口端112の運動の速度変化に伴い、変化する。
第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御すると、液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動周期の後半の加速段階で、図10における液滴IIとなるように、二番目の微小液滴199を生成する。次に、微小液滴199を安定的に生成する段階へ移行する。液体吐出ピペットチップ110の出口端112が二番目の微小液滴199を生成する運動周期の後半のタイミングで二番目の微小液滴199と等体積の新たな液滴195を生成し、しかも、この時の液体吐出ピペットチップ110の出口端112の運動速度も前半の運動周期のほうと同じである。二番目の微小液滴199と等体積の新たな液滴195は、液体吐出ピペットチップ110の出口端112から脱落される。このように繰り返すと、図10に示されるような液滴III、液滴IV、液滴Vなどが生成されることになる。第一の液体が均一な速度で排出されること、及び、液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動の両方は、生成された微小液滴199の体積の均一性を確保することができる。
上記から分かるように、液体吐出ピペットチップ110の出口端112に付着される液滴195が液体吐出ピペットチップ110の出口端112から脱離される(即ち、一つの微小液滴199を生成する)条件は、近似すると、
となる。第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御する場合に、生成された微小液滴199の体積を均一にすることは、微小液滴199が等時間間隔に液体吐出ピペットチップ110の出口端112から脱落されるということを条件としてなされる。
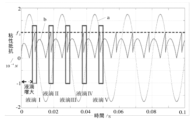
液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3に影響を与える要素は、液体吐出ピペットチップ110の表面自由エネルギー、幾何学的寸法及び第一の液体の表面張力が含まれる。液体吐出ピペットチップ110及び第一の液体が交換されない場合に、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3が変化しない。第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2に影響を与える要素は、第二の液体699の粘性係数η、液滴195の半径r及び液滴195の運動速度vが含まれる。第一の液体が均一な速度で液体吐出ピペットチップ110の出口端112から排出される際に、液滴195の半径rが、微小液滴199を生成する間隔時間により決められる。液滴195が液体吐出ピペットチップ110の出口端112から脱離されるまで液体吐出ピペットチップ110の出口端112と同期に運動しているため、運動制御機構130により液体吐出ピペットチップ110の出口端112の運動速度を正確に制御することができる。第二の液体699の粘性係数ηが液滴195を生成する工程にある範囲内に変化することがある。しかしながら、第二の液体699の粘性係数ηの変化範囲が極めて小さい。図12に示されるように、曲線aは、液体吐出ピペットチップ110の出口端112の変位を示し、曲線b及び曲線cが共に、第二の液体699の粘性係数ηが極めて小さい範囲で変化する時に、微小液滴199を生成する工程の曲線を示す。第二の液体699の粘性係数ηが極めて小さい範囲で変化する時に、微小液滴199を生成する時間間隔を変更することなく、極めて小さい範囲だけに微小液滴199を生成するタイミングを変更する。図12に示されるように、曲線b及び曲線cにより示される微小液滴199を生成する時間間隔は、いずれも半周期t/2であることから、生成された微小液滴199の体積の均一性を確保することができる。
図13に示されるように、液体吐出ピペットチップ110が交換され、又は、第一の液体の表面張力が温度変化などにより変化した場合に、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3を正確に制御することが難しくなる。従って、生成された微小液滴199の体積がある範囲でf3の変化に対して敏感にならないことは、寸法が均一な微小液滴199を生成することにとって重要な意味を持っている。図13に示されるように、曲線aが液体吐出ピペットチップ110の出口端112の変位を示し、曲線b及び曲線cが液体吐出ピペットチップ110が交換された時に微小液滴199の生成工程の曲線を示す。液体吐出ピペットチップ110が交換された後に、液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3がある範囲に波動することにより、液滴195が脱落される際に液体吐出ピペットチップ110の出口端112が異なる速度で運動するおそれがある。しかしながら、微小液滴199の生成が安定状態になっていると、液滴195が脱落される際に液体吐出ピペットチップ110の出口端112の速度が各揺動周期内に変化しない。図13に示されるように、曲線b及び曲線cにより示される微小液滴199の生成の時間間隔は、いずれも半周期t/2である。従って、微小液滴199を生成する間隔時間が変化しないことを確保することができる。第一の液体吐出液体吐出ピペットチップ110の出口端112の流速が変化しないと、生成された微小液滴199の体積が均一となる。それと同時に、第一の液体吐出液体吐出ピペットチップ110の出口端112の流速、及び、第二の液体699の中を揺動している液体吐出ピペットチップ110の出口端112の周波数を調整することができ、即ち、それと同時に、体積が均一な微小液滴199の体積及び生成の速さを制御することができる。
上記の実施例では、液体吐出ピペットチップ110の出口端112が正弦波状に変位する周期的な運動を行うと、付着力の最大値f3及び粘性抵抗f2の変化について、ある程度の許容性があり、即ち、付着力の最大値f3又は粘性抵抗f2がある範囲で変化する時に、依然として体積が均一な微小液滴199を生成することができる。液体吐出ピペットチップ110の出口端112が正弦波状に変位して周期的な運動を行う時に、体積が均一な微小液滴199の生成を確保できることを前提として、付着力の最大値f3を許容できる変化範囲を安定期として呼ぶ。安定期の存在は、液体吐出ピペットチップ110の加工及び微小液滴199の生成温度の制御にとって重要な意味を持っている。安定期の存在は、液体吐出ピペットチップ110の加工精度に対する要求をある程度まで低下させることが許可され、即ち、同じバッチで加工された液体吐出ピペットチップ110のそれぞれの表面自由エネルギーに相違が存在しても、体積が均一な微小液滴199を生成することができる。同様に、安定期の存在は、微小液滴199を生成する工程に温度制御に対する要求をある程度まで低下させることが許可される。
安定期の存在は、液体吐出ピペットチップ110の加工精度に対する要求又は微小液滴199生成工程の温度制御に対する要求を、ある程度まで低下させることが許可されることにより、さらに、微小液滴199の生成工程における消耗品としてのコスト及び制御用のコストを削減することができる。
上記の実施例では、液体吐出ピペットチップ110の出口端112が各運動周期に二つの微小液滴199を生成する。容易に理解され得るのは、液体吐出ピペットチップ110の出口端112が正弦波状に変位して周期的な運動を行う限り、液体吐出ピペットチップ110の出口端112の運動周期ごとに一つの微小液滴199を生成し、又は、二つの運動周期ごとに一つの微小液滴199を生成する時に、依然として付着力の最大値f3及び粘性抵抗f2の変化についてある程度の許容性を持ち、安定期が存在しているということである。
微小液滴199の生成は、微小液滴199の重力及び慣性力からの影響がほぼ受けられない。従って、微小液滴199を生成する時には、液体吐出ピペットチップ110の出口端112が第二の液体699に任意方向に沿って正弦波状に変位して周期的な運動を行うことが可能である。液体吐出ピペットチップ110の出口端112の運動軌跡は、弧線、直線又は他の形状の軌跡であってもよい。
図14(1)に示されるように、本出願の一実施例では、液体吐出ピペットチップ110を第二の液体699に傾斜して挿入し、液体吐出ピペットチップ110の出口端112を第二の液体699の液面下に揺動して微小液滴199を生成する。一つの実施可能な形態として、図14(2)に示されるように、液体吐出ピペットチップ110の出口端112が第二の液体699に水平の直線軌跡で、正弦波状に変位して周期的な運動を行い、微小液滴199を生成する。もう一つの実施可能な形態として、図14(3)に示されるように、液体吐出ピペットチップ110の出口端112が第二の液体699に垂直の直線軌跡で、正弦波状に変位して周期的な運動を行い、微小液滴199を生成する。
図15に示されるように、本出願の他の一実施例では、ステップS213に、速度変化の一つの周期に、液体吐出ピペットチップ110の出口端112が周期の前半及び後半にいずれも、等変速運動を行う。さらに、ステップS213に、周期の前半及び後半に、液体吐出ピペットチップ110の出口端112の加速度が同じである。第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御する。第一の液体が連続して排出されるのに伴い、運動工程において受けられた液体吐出ピペットチップ110の出口端112に付着される液滴195の粘性抵抗f2も持続的に増加する。粘性抵抗f2が液滴195と液体吐出ピペットチップ110との付着力の最大値f3よりも大きい場合に、液滴195が液体吐出ピペットチップ110から脱離されて微小液滴199を形成する。そして、次の微小液滴199を生成する工程へ移行する。液体吐出ピペットチップ110の出口端112の運動周波数及び運動速度が第一の液体の流速に合致するように制御することにより、生成された微小液滴199の体積の均一性を確保することができる。
従来の液体吐出ピペットチップは、一般的に、直管状である。上記の直管状である液体吐出ピペットチップは、自体の延在方向に沿って出口端と近い一方端が急速に運動する際に、生成された微小液滴が破壊されてしまうことがある。生成された微小液滴の完全性を維持させるために、液体吐出ピペットチップに振動周波数を低下させることが必要となり、そして、微小液滴の生成の速さが低下してしまうことになる。
このことに鑑み、従来の液体吐出ピペットチップが、生成された微小液滴の完全性、及び、微小液滴の生成の速さを両立できない課題について、生成された微小液滴の完全性、及び、微小液滴の生成の速さを両立できる液体吐出ピペットチップを提供するニーズがある。
本出願に係る一つの実施例が提供する微小液滴199を生成するための液体吐出ピペットチップ110は、中空のキャビティを有する針軸113及び針軸113の一方端に配置される出口端112を含み、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が90°以下である。液体吐出ピペットチップ110が管路本体の延在方向に沿って振動するときに、微小液滴199が液体吐出ピペットチップ110の出口端112から落下し、第二の液体699の粘性力及び液体吐出ピペットチップ110の出口端112の端面の押圧作用により、出口端112の運動軌跡から離れることから、微小液滴199が出口端112に破壊されてしまうことが避けられ、生成された微小液滴199に完全性が維持されると共に、液体吐出ピペットチップ110が管路本体の延在方向に急速に振動して微小液滴199を急速に生成することが可能となる。
図16に示されるように、一つの実施可能な形態として、液体吐出ピペットチップ110は、直管状であり、液体吐出ピペットチップ110の出口端112は、斜めカット構造である。液体吐出ピペットチップ110の出口端112を斜めカットすると、生成された微小液滴199の完全性及び微小液滴199の生成効率を両立できると共に、構造が簡単になり、容易に実現可能であり、制造のコストが低く、多量で加工される際に精度が高いという利点が存在している。さらに、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が15°-75°にあるようにすれば、実際の状況に応じて、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角を設置してもよい。微小液滴199の生成に影響が与えられず、又は、微小液滴199が破壊されないように、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が大きすぎたり小さすぎたりすることが好ましくない。さらに、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が30°-60°である。具体的には、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が45°である。45°の夾角とすれば、順調に微小液滴199を生成するのを確保することができるだけでなく、生成された微小液滴199を効果的に出口端112の運動軌跡から押し出し、生成された微小液滴199が液体吐出ピペットチップ110の出口端112により破壊されてしまうことを避けることができる。
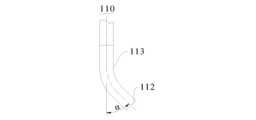
図17に示されるように、他の一つの実施可能な形態として、液体吐出ピペットチップ110の出口端112と近い針軸113の部分に折り曲げの構造が含まれる。液体吐出ピペットチップ110の出口端112を折り曲げることにより、生成された微小液滴199の完全性及び微小液滴199の生成効率を両立することができると共に、構造が簡単になり、容易に実現でき、制造のコストが低く、多量で加工される精度が高いという利点が存在している。さらに、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が15°-75°である。実際の状況に応じて、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角を設置してもよい。微小液滴199の生成に影響が与えられず、又は、微小液滴199が破壊されないように、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が大きすぎたり小さすぎたりすることが好ましくない。さらに、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が30°-60°である。具体的には、液体吐出ピペットチップ110の出口端112の端面の法線と針軸113の延在方向との夾角が45°である。45°の夾角とすれば、順調に微小液滴199を生成するのを確保することができるだけでなく、生成された微小液滴199を効果的に出口端112の運動軌跡から押し出し、生成された微小液滴199が液体吐出ピペットチップ110の出口端112により破壊されてしまうことを避けることができる。
好ましくは、液体吐出ピペットチップ110の出口端112と近い針軸113の折り曲げ構造は、折れ線セグメント、円弧セグメント、滑らかな曲線セグメント、直線セグメントなどのうちの一つ又は組み合わせを有する。図17に示されるように、本実施例では、液体吐出ピペットチップ110の出口端112と近い針軸113の部分は、遷移する円弧セグメントを有し、具体的に、円弧セグメントと直線セグメントとの組み合わせを有する。直管状とされる液体吐出ピペットチップ110は、加工中に所定角度だけ円弧状に曲げればよく、加工され易い。
図18及び図19に示されるように、本出願に係る一実施例が提供する液体吐出ピペットチップ110は、針ハブ114の延在方向に沿って針ハブ114を貫通する液体リザーバ115を有する針ハブ114を含む。液体リザーバ115は、一方端が液体吐出ピペットチップ110の出口端112から離れる針軸113の一方端に連通され、針ハブ114における針軸113から離れる一方端が液体吐出ピペットチップ110の入口端111である。針ハブ114は、針軸113に固定接続される。微小液滴199を生成するための第一の液体は、針ハブ114内に貯留されておいてもよい。そして、微小液滴199を連続的かつ多量に生成することが可能である。さらに、針ハブ114における針軸113から離れる一方端の内面に係止溝116が設けられる。この係止溝116により、流体駆動機構120と着脱可能な接続が可能となり、液体吐出ピペットチップ110を便宜に交換することができる。
本出願が提供する微小液滴199生成装置は、第二の液体699の液面下に微小液滴199を生成するために用いられる。微小液滴199生成装置は、流体駆動機構120、運動制御機構130及び上記態様のいずれか一つに記載の液体吐出ピペットチップ110を含む。液体吐出ピペットチップ110の内部には第一の液体が貯留されており、液体吐出ピペットチップ110は、出口端112及び入口端111を有する。流体駆動機構120は、液体吐出ピペットチップ110の入口端111に接続され、液体吐出ピペットチップ110の内部に貯留される第一の液体を液体吐出ピペットチップ110の出口端112から排出するために用いられる。運動制御機構130は、液体吐出ピペットチップ110の出口端112が第二の液体699の液面下に、所定軌跡、所定速度又は所定加速度で運動を行い、液体吐出ピペットチップ110の出口端112から排出される第一の液体が表面張力及び付着力に打ち勝ち、第二の液体699に微小液滴199を形成するように制御するために用いられる。
本出願が提供する液体吐出ピペットチップ110は、第二の液体699の液面下に運動工程において微小液滴199を生成する。一つの実施可能な形態として、液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に方形波状的に変化する速度で運動を行うことができ、ただし、その加速度をa
1とする。第一の液体は、液体吐出ピペットチップ110の出口端112から排出されると、液体吐出ピペットチップ110の出口端112に付着される液滴195を形成する。液滴195は、液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行う瞬間に、液体吐出ピペットチップ110の出口端112から脱離され、微小液滴199を形成する。図3に示されるように、液体吐出ピペットチップ110の出口端112から脱離されるまで受けられた微小液滴199の作用力は、それぞれ、重力G、第二の液体699の浮力f
1、第二の液体699の粘性抵抗f
2及び液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f
3である。微小液滴199について、液体吐出ピペットチップ110の出口端112から脱離されるまでその質量をmとし、その加速度をa
2とすると、ニュートン運動の第二法則によれば、
が得られる。
液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f
3は、液体吐出ピペットチップ110の表面自由エネルギー、液滴195の表面張力及び液体吐出ピペットチップ110の幾何学的寸法に関連されている。液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行う時に、液滴195に対する液体吐出ピペットチップ110の出口端112の付着力の方向と加速度の方向は同じである。液体吐出ピペットチップ110の出口端112に付着された液滴195を球状として簡略化する。ストークス(Stokes)の式によると、わかるように、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗がf
2=6πηrvとなり、そのうち、ηが第二の液体699の粘性係数であり、rが液滴195の半径であり、vが液滴195の運動速度である。液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行うまで、液滴195の速度がゼロであることから、液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行う瞬間に、第二の液体699に受けられた液滴195の粘性抵抗f
2がゼロ又は極めて小さい。微小液滴199を生成する工程では、一般的に、液滴195の直径範囲がピコリットルからマイクロリットルまでのオーダーであり、液滴195の重力Gと第二の液体699の浮力f
1とは、それらの方向が反対であることから、液滴195の重力Gと第二の液体699の浮力f
1とのベクトルの和がほぼゼロになる。
運動制御機構130の連動によれば、液体吐出ピペットチップ110の出口端112の瞬間加速度を正確に制御することができる。そして、液体吐出ピペットチップ110の出口端112について各瞬間で加速度を比較的大きくする制御することができれば、液体吐出ピペットチップ110の出口端112が瞬間加速度運動を行うと、液滴195を効果的に生成することができる。液体吐出ピペットチップ110の出口端112は、一つの運動周期に、一つ又は二つ以上の微小液滴199を形成することが好ましい。
図20に示されるように、本出願に係る一実施例では、液体吐出ピペットチップ110の出口端112の端面の法線と管路本体の延在方向との夾角が45°であり、液体吐出ピペットチップ110の出口端112が斜めカットの構造である。第二の液体699の液面が上向きであり、液体吐出ピペットチップ110が垂直して設置される。液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に、垂直線セグメントの軌跡に沿って、方形波状に変化する速度で、運動を行う。液体吐出ピペットチップ110の出口端112は、一つの運動周期に、一つの微小液滴199を生成する。液体吐出ピペットチップ110に、第一の液体が貯留されている。流体駆動機構120は、液体吐出ピペットチップ110が液体吐出ピペットチップ110の各運動周期に出口端112から等体積の第一の液体を排出するように制御する。液体吐出ピペットチップ110の出口端112に付着される液滴195が所定体積になると、液体吐出ピペットチップ110の出口端112は、上限界の位置からa1という大きさの加速度で下向きに瞬間加速度運動を行いながら、液体吐出ピペットチップ110の出口端112に付着される液滴195を液体吐出ピペットチップ110の出口端112から脱離して微小液滴199を形成する。第二の液体699の粘性力、及び、液体吐出ピペットチップ110の出口端112の端面の押圧作用により、微小液滴199が出口端112の運動軌跡から離れて液体吐出ピペットチップ110の側壁に近接する。液体吐出ピペットチップ110の出口端112が持続的に下向きに運動しながら、第一の液体を依然として液体吐出ピペットチップ110の出口端112から排出して液体吐出ピペットチップ110の出口端112に付着される液滴195を形成する。液体吐出ピペットチップ110の出口端112が下限界の位置まで運動すると、液体吐出ピペットチップ110の出口端112が下限界の位置から上向きに運動する。液体吐出ピペットチップ110の出口端112が下限界の位置から上向き運動する工程では、第一の液体を依然として液体吐出ピペットチップ110の出口端112から排出し、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積が増大する。液体吐出ピペットチップ110の出口端112が上限界の位置まで運動すると、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積が、前回に脱落された微小液滴199の体積と等しい。液体吐出ピペットチップ110の出口端112が再度、上限界の位置からa1という大きさの加速度で下向きに瞬間加速度運動をして新たな微小液滴199を形成する。このように繰り返す。
図21に示されるように、本出願に係る一実施例では、液体吐出ピペットチップ110の出口端112の端面の法線と管路本体の延在方向との夾角が45°であり、液体吐出ピペットチップ110の出口端112が斜めカットの構造である。第二の液体699の液面が上向きであり、液体吐出ピペットチップ110が垂直して設置される。液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に、垂直線セグメントの軌跡に沿って、方形波状に変化する速度で運動を行う。液体吐出ピペットチップ110の出口端112は、一つの運動周期に、二つの微小液滴199を生成する。液体吐出ピペットチップ110に、第一の液体が貯留されている。流体駆動機構120は、第一の液体が均一な流速で出口端112から排出されるように制御する。液体吐出ピペットチップ110の出口端112に付着される液滴195が所定体積になると、液体吐出ピペットチップ110の出口端112が上限界の位置からa1という大きさの加速度で下向きに瞬間加速度運動を行いながら、液体吐出ピペットチップ110の出口端112に付着される液滴195を液体吐出ピペットチップ110の出口端112から脱離し、微小液滴199を形成する。第二の液体699の粘性力及び液体吐出ピペットチップ110の出口端112の端面の押圧作用により、微小液滴199が出口端112の運動軌跡から離れ、液体吐出ピペットチップ110の側壁に近接する。液体吐出ピペットチップ110の出口端112が継続して下向きに運動を行いながら、第一の液体を依然として液体吐出ピペットチップ110の出口端112から排出し、液体吐出ピペットチップ110の出口端112に付着される液滴195を形成し、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積が増大する。
液体吐出ピペットチップ110の出口端112が下限界の位置まで運動するときに、液体吐出ピペットチップ110の出口端112に付着された液滴195の体積が前回に脱落された微小液滴199の体積と等しい。液体吐出ピペットチップ110の出口端112が下限界の位置からa1という大きさの加速度で上向きに瞬間加速度運動を行うと、出口端112に付着される液滴195が出口端112から脱離され、新たな微小液滴199を形成する。液体吐出ピペットチップ110の出口端112が下限界に位置する時に生成された微小液滴199は、出口端112の付着力の作用により、小さい距離だけ上向きに運動してから、第二の液体699により次第に落下していく。液体吐出ピペットチップ110の出口端112が下限界に位置すると上向きに運動する工程では、第一の液体が依然として液体吐出ピペットチップ110の出口端112から排出され、液体吐出ピペットチップ110の出口端112に付着された液滴195の体積が増大する。液体吐出ピペットチップ110の出口端112が上限界の位置まで運動すると、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積が前回に脱落された微小液滴199の体積と等しい。液体吐出ピペットチップ110の出口端112が再度、上限界の位置からa1という大きさの加速度で下向きに瞬間加速度運動を行い、新たな微小液滴199を形成する。このように繰り返す。液体吐出ピペットチップ110の出口端112が再度、上限界の位置から下向きに運動している時に、出口端112の直下の軌跡範囲に依然として微小液滴199が存在している場合に、生成された微小液滴199は、出口端112に付着される液滴195に衝突されると、出口端112の端面の法線に沿って運動して出口端112の運動軌跡から離れる。
本出願が提供する液体吐出ピペットチップ110は、第二の液体699の液面下に運動を行う工程に、微小液滴199を生成する。他の一つの実施可能な形態として、液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に正弦波状に変位して運動を行う。第一の液体は、液体吐出ピペットチップ110の出口端112から排出され、液体吐出ピペットチップ110の出口端112に付着される液滴195を形成する。液滴195は、液体吐出ピペットチップ110の出口端112の運動速度が一定の程度になると、液体吐出ピペットチップ110の出口端112から脱離され、微小液滴199を形成する。図6に示されるように、液体吐出ピペットチップ110の出口端112から脱離されるまで受けられた微小液滴199の作用力は、それぞれ、重力G、第二の液体699の浮力f
1、第二の液体699の粘性抵抗f
1及び液体吐出ピペットチップ110の出口端112と液滴195との最大の付着力f
3である。微小液滴199について、液体吐出ピペットチップ110の出口端112から脱離されるまでその質量をmとし、速度をvとし、加速度をa
2とすると、液滴195は、第二の液体699の中を運動している工程において、粘性力f
2、重力G、浮力f
1及び付着力f
3による相乗効果により受けられており、即ち、
液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f
3は、液体吐出ピペットチップ110の表面自由エネルギー、液滴195の表面張力及び液体吐出ピペットチップ110の幾何学的寸法に関連されている。液体吐出ピペットチップ110の出口端112に付着された液滴195を球状として簡略化する。ストークス(Stokes)の式によると、わかるように、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗がf
2=6πηrvとなり、そのうち、ηが第二の液体699の粘性係数であり、rが液滴195の半径であり、vが液滴195の運動速度である。微小液滴199を生成する工程において、一般的に、液滴195の直径範囲は、ピコリットルからマイクロリットルまでのオーダーであり、第二の液体699の粘性係数は、一般的に、比較的大きい。
図22に示されるように、本出願に係る一実施例では、液体吐出ピペットチップ110の出口端112の端面の法線と管路本体の延在方向との夾角が45°であり、液体吐出ピペットチップ110の出口端112と近い針軸113の部分が折り曲げの構造である。第二の液体699の液面が上向きであり、液体吐出ピペットチップ110が垂直して設置される。液体吐出ピペットチップ110の出口端112が第二の液体699の液面下に垂直線セグメントの軌跡に沿って、正弦波状に変位して運動を行う。液体吐出ピペットチップ110の出口端112は、一つの運動周期に、一つの微小液滴199を生成する。液体吐出ピペットチップ110に第一の液体が貯留されている。流体駆動機構120は、制御液体吐出ピペットチップ110が液体吐出ピペットチップ110の各運動周期に出口端112から等体積の第一の液体を排出するように制御する。液体吐出ピペットチップ110の出口端112は、正弦波状に変位して直線に運動することにより加速度運動で降下する段階で、一番目の微小液滴199を生成する。二番目の微小液滴199を生成する初期段階では、液体吐出ピペットチップ110の出口端112が下向きに減速段階に位置するものの、液体吐出ピペットチップ110の出口端112に付着される液滴195の半径rが速く増加していることから、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2が、直ぐに低下することなく、小範囲に増加する。そして、液滴195の半径rが緩く増加し、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2が主に、液体吐出ピペットチップ110の出口端112の運動の速度変化に伴い変化する。液体吐出ピペットチップ110の出口端112が限界位置まで下がってから上がりながら、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積が持続的に増大する。
第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御する時に、液体吐出ピペットチップ110の出口端112が、先の一つの微小液滴199を生成してから次の一つの運動周期のタイミングに、先の一つの微小液滴199と等体積の新たな液滴195を再度生成し、しかも、この時に、液体吐出ピペットチップ110の出口端112の運動速度も先の一つの運動周期のほうと同じである。先の一つの微小液滴199と等体積の新たな液滴195は、液体吐出ピペットチップ110の出口端112から脱落される。このように繰り返す。
第一の液体が均一な速度で排出されること、及び、液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動の両方は、生成された微小液滴199の体積の均一性を確保することができる。液体吐出ピペットチップ110の出口端112が再度上限界の位置から下向きに運動している時に、出口端112の直下の軌跡範囲に依然として微小液滴199が存在している場合に、生成された微小液滴199は、出口端112に付着される液滴195に衝突し、出口端112の端面の法線に沿って運動して、出口端112の運動軌跡から離れる。
図23に示されるように、本出願に係る一実施例では、液体吐出ピペットチップ110の出口端112の端面の法線と管路本体の延在方向との夾角が45°であり、液体吐出ピペットチップ110の出口端112と近い針軸113の部分は、折り曲げの構造である。第二の液体699の液面は上向きであり、液体吐出ピペットチップ110が垂直して配置される。液体吐出ピペットチップ110の出口端112は、第二の液体699の液面下に垂直線セグメントの軌跡に沿って、正弦波状の変位で運動を行う。液体吐出ピペットチップ110の出口端112は、一つの運動周期に、二つの微小液滴199を生成する。液体吐出ピペットチップ110に、第一の液体が貯留されている。流体駆動機構120は、第一の液体が均一な流速で出口端112から排出されるように制御する。液体吐出ピペットチップ110の出口端112に付着された液滴195の半径rが増大するのに伴い、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2も持続的に増大する。液体吐出ピペットチップ110の出口端112が下向きに加速段階に位置する時に、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2が液体吐出ピペットチップ110の出口端112と液滴195との付着力の最大値f3よりも大きくなり、液滴195が液体吐出ピペットチップ110の出口端112から脱落され、微小液滴199を形成する。第二の液体699の粘性力及び液体吐出ピペットチップ110の出口端112の端面の押圧作用により、微小液滴199が出口端112の運動軌跡から離れ、液体吐出ピペットチップ110の側壁に近接する。
液体吐出ピペットチップ110の出口端112が持続的に下向きに運動し、液体吐出ピペットチップ110の出口端112が限界の位置まで下がってから上がり始める。それと共に、第一の液体が依然として液体吐出ピペットチップ110の出口端112から排出され、液体吐出ピペットチップ110の出口端112に付着される液滴195を形成し、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積が増大する。二番目の微小液滴199を生成する初期段階では、液体吐出ピペットチップ110の出口端112の運動速度が僅か減少したが、液体吐出ピペットチップ110の出口端112に付着される液滴195の半径rが速く増加していることから、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2が、直ぐに低下することなく、小さい範囲に増加する。その後、液滴195の半径rが緩く増加し、第二の液体699の中を運動している時に受けられた液滴195の粘性抵抗f2は、主に、液体吐出ピペットチップ110の出口端112の運動の速度変化に伴い、変化する。
時間間隔が半周期経過すると、液体吐出ピペットチップ110の出口端112が上向きに加速段階に位置する。液体吐出ピペットチップ110の出口端112に付着される液滴195の体積は、前回に脱落された微小液滴199の体積と等しく、同時に、液体吐出ピペットチップ110の出口端112の速度も先の半周期と同じであり、出口端112に付着される液滴195が出口端112から脱離され、新たな微小液滴199を形成する。液体吐出ピペットチップ110の出口端112が上向きに加速段階に位置するときに生成された微小液滴199は、出口端112の付着力の作用により短い距離だけ上向きに運動してから、第二の液体699において次第に下がり始める。それと同時に、第一の液体が依然として液体吐出ピペットチップ110の出口端112から排出され、液体吐出ピペットチップ110の出口端112に付着される液滴195を形成し、液体吐出ピペットチップ110の出口端112に付着される液滴195の体積が増大する。
時間間隔が半周期経過すると、液体吐出ピペットチップ110の出口端112が下向きに加速段階に位置する。液体吐出ピペットチップ110の出口端112に付着される液滴195の体積は、前回に脱落された微小液滴199の体積と等しく、同時に、液体吐出ピペットチップ110の出口端112の速度も先の半周期と同じであり、出口端112に付着される液滴195が出口端112から脱離され、新たな微小液滴199を形成する。このように繰り返す。第一の液体を均一な流速で液体吐出ピペットチップ110の出口端112から排出するように制御する。液体吐出ピペットチップ110の出口端112は、垂直線のセグメントの軌跡に沿って、正弦波状に変位して運動する周期の後半の加速段階に、二番目の微小液滴199を生成した後に、微小液滴199を安定的に生成する段階へ移行する。第一の液体が均一な速度で排出されること、及び、液体吐出ピペットチップ110の出口端112が正弦波状に変位して揺動する運動の両方は、生成された微小液滴199の体積の均一性を確保することができる。液体吐出ピペットチップ110の出口端112が再度、上限界の位置から下向きに運動している時に、出口端112の直下の軌跡範囲に依然として微小液滴199が存在している場合に、生成された微小液滴199は、出口端112に付着される液滴195に衝突すると、出口端112の端面の法線に沿って運動し、出口端112の運動軌跡から離れる。
本出願が提供する微小液滴生成装置及び生成方法は、医学臨床検査、ナノ材料製造、食料品及び環境検査、生化学解析などの応用分野に幅広く応用される。一つの具体的な適用例としては、本出願が提供する微小液滴199の生成装置及び生成方法がポリメラーゼ連鎖反応(Polymerase ChainReaction、PCR)に応用される。
液体吐出ピペットチップ110は、その断面寸法が一般的にミクロンレベルであるため、従来の表面処理方法は、比較的大きい部品に用いられることが多く、比較的小さい液体吐出ピペットチップ110に完全に適用され難い。
このことに鑑み、従来の表面処理方法は、比較的大きい部品に用いられるが、比較的小さい液体吐出ピペットチップ110に完全に適用され難いという課題について、ミクロンレベルの液体吐出ピペットチップ110の液体吐出ピペットチップ110の表面処理方法に適用され得ることを提供するニーズが存在している。
図24に示されるように、本出願に係る一実施例が提供する液体吐出ピペットチップ110の表面処理方法は、液体吐出ピペットチップ110の表面を処理するためのものであって、前記液体吐出ピペットチップ110にシラン化処理を行うステップS260と、ジエチルピロカーボネート(DEPC)の水溶液により、前記液体吐出ピペットチップ110を処理するステップS270と、前記液体吐出ピペットチップ110を乾燥させるステップS280とを含む。
上記の液体吐出ピペットチップ110の表面処理方法は、シラン化処理により液体吐出ピペットチップ110の表面自由エネルギーを低下させると共に、液体吐出ピペットチップ110の表面自由エネルギーを、一定の区間に制限し、微小液滴199の生成工程に対する液体吐出ピペットチップ110の表面特性の影響を低減することができる。
図25に示されるように、本出願に係る一実施例では、ステップS260の前に、前記液体吐出ピペットチップ110を前処理するステップS240をさらに含む。前記ステップS240には、前記前処理は、前記液体吐出ピペットチップ110の脱脂、汚れ除去又は洗浄操作などの一つ又は複数が含まれる。液体吐出ピペットチップ110に脱脂、汚れ除去及び洗浄を行うことは、先の加工工程に、液体吐出ピペットチップ110の表面に付着された汚染物質又は妨害物を効果的に除去することができる。さらに、前記ステップS240には、超音波振動により液体吐出ピペットチップ110の表面に対して補助脱脂、補助汚れ除去又は補助洗浄を行う。超音波の環境において、液体吐出ピペットチップ110に脱脂、汚れ除去及び洗浄を行い、化学の手段及び機械の手段と協働して使用することは、液体吐出ピペットチップ110の表面を前処理する効果を確保することができる。具体的に、前記ステップS240には、液体吐出ピペットチップ110は、材質がステンレス鋼であり、ステンレス鋼の洗浄剤により、前記液体吐出ピペットチップ110を洗浄する。ステンレス鋼の洗浄剤は、ステンレス鋼の材質の液体吐出ピペットチップ110にとって、より高い洗浄効果を持っている。他の実施例では、液体吐出ピペットチップ110の表面に対する前処理は、液体吐出ピペットチップ110の表面を洗浄できる方法であれば、他の方法であってもよい。本出願に係る他の実施例では、液体吐出ピペットチップ110は、石英キャピラリー、ガラス管及びダブルファイバーキャピラリーなどのうちの一つである。
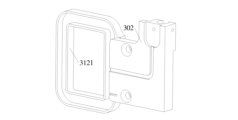
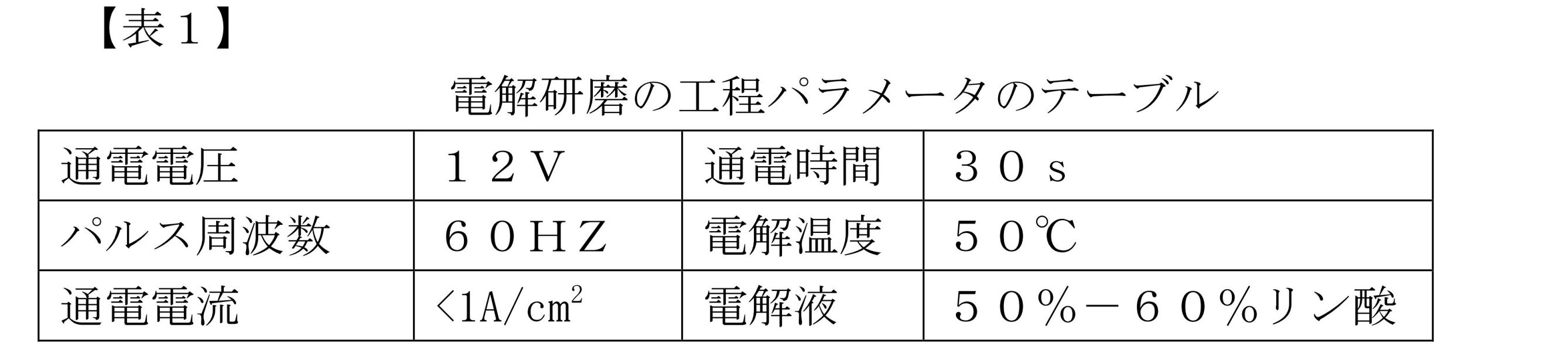
本出願に係る一実施例では、ステップS240の後かつ前記ステップS260の前に、前記液体吐出ピペットチップを電解研磨するステップS250をさらに含む。電解研磨によれば、比較的小さい液体吐出ピペットチップ110の表面粗さを低下させ、しかも、液体吐出ピペットチップ110の表面品質が、シラン化するための要求を満たすようにすることができる。電解研磨は、液体吐出ピペットチップ110の表面品質にとって極めて重要なものであり、ステンレス鋼の材質の液体吐出ピペットチップ110の表面品質を目標に到達させるのに肝心である。本出願に係る一実施例では、ステンレス鋼の材質の液体吐出ピペットチップ110を陽極とし、電解液において、非溶性を持つ銅などを陰極として用いる。二つの極を同時に電解溝に浸漬し、直流の電流を流すと、陽極となる液体吐出ピペットチップ110を選択的に溶解し、液体吐出ピペットチップ110の表面を研磨するという目的を達成する。本実施例では、液体吐出ピペットチップ110を電解研磨する工程のパラメータは、以下に示される。
電解研磨の工程では、使用された液体吐出ピペットチップ110は、その内径が60μmであり、その外径が150μmである。電解研磨が完了した後に、金相顕微鏡により50倍拡大して観測した結果、明らかなこすり傷がない。
前記ステップS260によれば、液体吐出ピペットチップ110の表面に非晶質シリコン膜を形成可能であり、化学気相成長(ChemicalVaporDeposition:CVD)法により、液体吐出ピペットチップ110の表面に非晶質シリコン膜を形成することが好ましい。非晶質シリコン膜の厚さが100Å乃至1000Åであることが好ましい。
図25に示されるように、本出願に係る一実施例では、前記ステップS260は、脱イオン水により、前記液体吐出ピペットチップ110を洗浄又は浸漬するステップS261と、シラン化試薬により、前記液体吐出ピペットチップ110を処理するステップS262と、脱イオン水により、前記液体吐出ピペットチップ110を洗浄又は浸漬するステップS263とを含む。
シラン化する前に、電解された液体吐出ピペットチップ110を脱イオン水により洗浄又は浸漬し、液体吐出ピペットチップ110の表面の汚れ及び静電を除去する。シラン化の処理により、液体吐出ピペットチップ110の表面自由エネルギーを低下させ、液体吐出ピペットチップ110の表面自由エネルギーを一定の区間に制限し、微小液滴199の生成工程に対する液体吐出ピペットチップ110の表面特性の影響を低減することができる。シラン化された後に、シラン化された液体吐出ピペットチップ110を脱イオン水により洗浄又は浸漬し、液体吐出ピペットチップ110の表面の汚れ及び静電を除去する。前記ステップS262に、シラン化の試薬により、化学気相成長法を利用して液体吐出ピペットチップ110の表面に非晶質シリコン膜を形成することが好ましい。好ましくは、シラン化の試薬は、四水素化ケイ素気体が含まれており、より好ましくは、四水素化ケイ素とドーパントである水素化リンとの混合気体が含まれる。液体吐出ピペットチップ110の表面に一つの非晶質シリコン膜を形成することにより、液体吐出ピペットチップ110の表面自由エネルギーを低減することができる。
本実施例では、ステンレス鋼にその表面をシラン化する処理の具体的なステップは、電解されたステンレス鋼の材質の液体吐出ピペットチップ110を化学気相成長室に置いて、液体吐出ピペットチップ110の表面に水蒸気を除去させ、化学気相成長室を真空まで排気し、四水素化ケイ素と水素化リンとの混合気体を導入し、気相堆積の気圧を0.1Pa-500Paにし、しかも、気相堆積の温度を180℃-500℃にするように制御し、化学気相成長をさせ、0.4-8時間堆積し、堆積が完了すると、窒素ガスを導入して温度を室温まで下げるということである。具体的に、混合気体に前記四水素化ケイ素の体積パーセントが95.0%-99.9%であり、混合気体に前記水素化リンの体積パーセントが0.1%-5.0%である。
図25に示されるように、前記ステップS270は、体積分率が0.5%-1.5%のジエチルピロカーボネート水溶液により、前記液体吐出ピペットチップ110を10分-20分浸漬するステップS271と、前記液体吐出ピペットチップ110を高圧で殺菌するステップS272を含む。体積分率が1%のDEPC水溶液により、液体吐出ピペットチップ110を浸漬し、液体吐出ピペットチップ110の表面にリボヌクレアーゼ(Ribonuclease、RNase)及びデオキシリボヌクレアーゼ(deoxyribonuclease、DNase)などがないように確保することにより、液体吐出ピペットチップ110を使用する引き続きの操作の干渉が低下する。前記液体吐出ピペットチップ110を高圧で殺菌することにより、液体吐出ピペットチップ110の表面に残られたDPEC水溶液を効果的に除去すると共に、DPEC水溶液に除去し切れなかったRNase及びDNaseなどを効果的に除去することができる。
体積分率が1%のDEPC水溶液により、前記液体吐出ピペットチップ110を浸漬する時間は、具体的な状況に応じて設定されてもよい。さらに、前記ステップS271に、体積分率が1%のDEPC水溶液により前記液体吐出ピペットチップ110を浸漬する時間は15分である。測定結果からわかるように、15分とすれば、液体吐出ピペットチップ110の表面にRNase及びDNaseをきれいに除去するために十分である。さらに、前記ステップS280に、窒素ガス浄化炉により、液体吐出ピペットチップ110をさらに浄化し、液体吐出ピペットチップ110を浄化、乾燥及び焼成する。前記液体吐出ピペットチップ110を乾燥させるときに窒素ガスを保護気体として使用する。窒素ガスを保護気体として使用することは、雰囲気における化学の性質が比較的活性である気体と液体吐出ピペットチップ110の表面との化学反応を効果的に避けることができ、液体吐出ピペットチップ110に対する効果的な保護を実現することができる。
本出願に係る一つの具体的な実施例では、電解研磨の工程において、使用された液体吐出ピペットチップ110は、その内径が60μmであり、その外径が150μmである。電解された液体吐出ピペットチップ110を脱イオン水に5分浸漬する。そして、液体吐出ピペットチップ110を化学気相成長室に置いて、真空にすると、四水素化ケイ素と水素化リンとの混合気体を導入する。気相堆積の気圧を300±20Paにし、しかも、気相堆積の温度を350±20℃にするように制御する。混合気体には、前記四水素化ケイ素の体積パーセントが97.0%であり、前記水素化リンの体積パーセントが3.0%である。2時間堆積し、堆積が完了すると、窒素ガスを導入し、温度を室温まで下げる。脱イオン水により、シラン化された液体吐出ピペットチップ110を洗浄する。1%のDEPC水溶液により、液体吐出ピペットチップ110の全体を15分浸漬し、しかも、液体吐出ピペットチップ110を高圧で殺菌する。最後に、液体吐出ピペットチップ110を窒素浄化炉に置いてその表面を洗浄する。
本出願に係る実施例が提供する液体吐出ピペットチップ110の表面処理方法により、18本の同じ寸法の液体吐出ピペットチップ110を一括して処理し、18本の液体吐出ピペットチップ110についてそれぞれ液滴195の吊り下げ試験を行う。流体制御機構により、第一の液体を液体吐出ピペットチップ110の出口端112から1.0nL/sの流速で排出する。先の一つの微小液滴199が落下するタイミングから計時して、各液体吐出ピペットチップ110について、100個の微小液滴199の落下時間を計算する。18本の液体吐出ピペットチップ110について、それぞれの対応する100個の液滴195の落下時間は、平均して以下のテーブルに示されている。
18個の液体吐出ピペットチップ110について、それぞれの対応する微小液滴199の平均の落下時間の相対的な変化範囲は、18個の液体吐出ピペットチップ110間の表面自由エネルギーの相対的な変化範囲を直接に示すことができる。上記の試験データからわかるように、本出願の実施例が提供する液体吐出ピペットチップ110表面処理方法により、一括して処理された液体吐出ピペットチップ110の表面自由エネルギーの標準偏差は1.33%であり、微小液滴199を生成する各種類の体積について、その均一性への要求が十分に満たされている。
本出願に係る一実施例では、液体吐出ピペットチップ110は、その一方端が出口端112であり、前記液体吐出ピペットチップの表面処理方法は、液体吐出ピペットチップ110の出口端112及び外側壁を表面処理するために用いられる。同時に、液体吐出ピペットチップ110の出口端112及び外側壁を表面処理し、微小液滴199を生成する工程には、液体吐出ピペットチップ110の出口端及び外側壁が生成された微小液滴199に接触した後に、その均一な表面が微小液滴199を押し出すことにより、微小液滴199の破壊を効果的に避けることができる。
従来の流体駆動機構により微小液滴を生成する工程では、液体吐出ピペットチップの出口端が運動中の状態にあることから、排出された液体の流速が不安定で、かつ、制御不可能になる。そして、生成された微小液滴は、その体積にランダム性が現れている。このことに鑑み、従来の液体吐出ピペットチップが運動していると、排出された液体の流速が不安定でかつ制御不可能となることにより微小液滴の体積にランダム性が現れているという課題について、液体吐出ピペットチップが所定流速で液体を排出することを確保可能な流体駆動機構を提供するニーズが存在している。
微小液滴199を生成する工程では、第一の液体が所定流速で液体吐出ピペットチップ110の出口端112から排出される。液体吐出ピペットチップ110の出口端112は、瞬間加速度運動を含む周期的な運動を行うと、微小液滴199を効果的に生成することができるだけでなく、生成される微小液滴199の寸法を制御することに役立つ。液体吐出ピペットチップ110の出口端112は、正弦波状に変位して周期的な運動を行う時に、微小液滴199を効果的に生成することができるだけでなく、生成された微小液滴199の体積がよい均一性を持っている。上記の微小液滴199を生成する二つの工程では、第一の液体が流体駆動機構120の駆動により、所定流速で液体吐出ピペットチップ110の出口端112から排出される。
図26及び図27に示されるように、本出願が提供流体駆動機構120は、微小液滴生成システムに用いられており、容積可変アセンブリ121及びパワーアセンブリ122を含む。容積可変アセンブリ121は、シリンジ1211及びブッシュロッド1212を含む。ブッシュロッド1212は、シリンジ1211の内壁と摺動するように協働し、シリンジ1211に駆動液体1214を貯留可能である。シリンジ1211は、第一の液体190を貯留する液体吐出ピペットチップ110の入口端111に連通するための液体出入口1213を有する。パワーアセンブリ122は、ブッシュロッド1212に動力伝達可能に接続され、ブッシュロッド1212がシリンジ1211の延在方向に沿って摺動するように駆動するために用いられる。微小液滴199を生成する工程には、パワーアセンブリ122は、ブッシュロッド1212がシリンジ1211に貯留されている駆動液体1214を押圧するように駆動し、駆動液体1214が液体吐出ピペットチップ110に貯留されている第一の液体190を押圧し、そして、第一の液体190を液体吐出ピペットチップ110の出口端112から排出する。
本出願が提供する流体駆動機構120は、液体(駆動液体1214)の非圧縮性により、液体吐出ピペットチップ110の出口端112が、高周波数で振動している時でも、所定流速で第一の液体190を液体吐出ピペットチップ110の出口端112から排出するということを確保することができる。本出願が提供する流体駆動機構120は、生成された微小液滴199の体積を正確に制御することができる。本出願が提供する流体駆動機構120は、上記実施方式に限定されず、例えば、蠕動ポンプ、加圧駆動ポンプ、空気圧駆動ポンプ、電気浸漬駆動ポンプ等が適用されてもよい。
一つの実施可能な形態として、シリンジ1211の液体出入口1213は、液体吐出ピペットチップ110の入口端111に細管123を介して連通される。シリンジ1211と細管123には、駆動液体1214が貯留されている。パワーアセンブリ122は、容積可変アセンブリ121のブッシュロッド1212に動力伝達可能に接続され、パワーアセンブリ122は、容積可変アセンブリ121のブッシュロッド1212がシリンジ1211を摺動するように押し出すために用いられる。微小液滴199の生成工程では、パワーアセンブリ122が容積可変アセンブリ121のブッシュロッド1212を押し出し、ブッシュロッド1212がシリンジ1211及び細管123に貯留されている駆動液体1214を押圧し、駆動液体1214が液体吐出ピペットチップ110に貯留されている第一の液体190を押圧し、そして、第一の液体190を液体吐出ピペットチップ110の出口端112から排出する。細管123により、シリンジ1211の液体出入口1213を液体吐出ピペットチップ110の入口端111に接続していると、まず、細管123の内径が比較的小さいため、ブッシュロッド1212の行程を制御することにより、排出液体の体積を正確に制御することができ、次に、細管123により、シリンジ1211と液体吐出ピペットチップ110との位置及び距離を自由に設置し、シリンジ1211と液体吐出ピペットチップ110との間に他の必要な設備を設置することを便宜にすることができる。
本出願に係る一実施例では、パワーアセンブリ122は、押し出しブッシュロッド1212がシリンジ1211を均一な速度で摺動するように押し出し、言い換えると、液体1214をブッシュロッド1212の押し出しにより均一な流速で容積可変アセンブリ121の液体出入口1213から排出し、細管123を介して均一な流速で液体吐出ピペットチップ110に進入するように駆動する。液体吐出ピペットチップ110に貯留されている第一の液体190は、駆動液体1214の押し出しにより、均一な流速で液体吐出ピペットチップ110の出口端112から排出される。駆動液体1214を伝動媒体として利用し、ブッシュロッド1212が均一な流速で駆動液体1214を排出するように制御することにより、本実施例が提供する流体駆動機構120は、液体吐出ピペットチップ110が静止状態にあるときに均一な流速で第一の液体190を液体吐出ピペットチップ110の出口端112から排出できるだけでなく、液体吐出ピペットチップ110が急速に振動する最中の状態にあっても、本実施例が提供する流体駆動機構120が依然として第一の液体190を液体吐出ピペットチップ110の出口端112から均一な流速で排出することも確保することができる。本実施例が提供する流体駆動機構120は、生成された微小液滴199の体積の均一性を大幅に高めることができる。
パワーアセンブリ122は、ブッシュロッド1212がシリンジ1211に液体出入口1213から離れる方向又は液体出入口1213に近接する方向に沿って摺動するように連動するということに役割を持っている。好ましくは、パワーアセンブリ122が、直動運動を直接に出力するシリンダや油圧缸などのアセンブリであり、例えば、モーターと同期プーリの組み合わせやモーターとネジ棒1222及びスライドブロック1223の組み合わせなどの円運動を直動運動に変換するアセンブリであってもよい。本出願では、パワーアセンブリ122の具体的な構造が限定されていない。図27に示されるように、本出願に係る一実施例では、パワーアセンブリ122が駆動モーター1221、ネジ棒1222及びスライドブロック1223を含む。駆動モーター1221は、その出力軸がネジ棒1222の一方端に動力伝達可能に接続され、スライドブロック1223が雌ねじを有し、スライドブロック1223がネジ棒1222の表面の雄ねじに協働して接続される。スライドブロック1223の外縁は、ブッシュロッド1212におけるシリンジ1211から離れる一方端に固定接続される。スライドブロック1223は、ネジ棒1222と協働して、駆動モーター1221が出力する回転運動を、ネジ棒1222の軸方向に沿うスライドブロック1223の直動運動に変換し、容積可変アセンブリ121のブッシュロッド1212がシリンジ1211を摺動するように連動する。さらに、本実施例が使用する駆動モーター1221は、サーボモーターである。サーボモーターは、出力角度の変位を正確にフィードバック制御できるという特徴を持っている。
図28に示されるように、本出願に係る一実施例では、流体駆動機構120は、さらに、三方切替弁124と貯液タンク125を含む。三方切替弁124は、第一のポート、第二のポート及び第三のポートを有する。液体吐出ピペットチップ110の入口端111、容積可変アセンブリ121の液体出入口1213及び貯液タンク125は、三方切替弁124の第一のポート、第二のポート及び第三のポートに、それぞれ連通される。三方切替弁124は、少なくとも、流体駆動機構120を制御して以下の二つのモードを実施可能である。一番目のモードでは、容積可変アセンブリ121の液体出入口1213を液体吐出ピペットチップ110の入口端111に連通し、パワーアセンブリ122の連動により、容積可変アセンブリ121が液体吐出ピペットチップ110の液体に駆動力をかけ、液体吐出ピペットチップ110内の第一の液体190を液体吐出ピペットチップ110の出口端112から排出し、又は、第一の液体190を液体吐出ピペットチップ110の出口端112から液体吐出ピペットチップ110に吸入するようにする。二番目のモードでは、容積可変アセンブリ121の液体出入口1213を貯液タンク125に連通し、パワーアセンブリ122の連動により、容積可変アセンブリ121が貯液タンク125中の駆動液体1214を容積可変アセンブリ121のシリンジ1211に吸入し、又は、容積可変アセンブリ121内の駆動液を貯液タンク125に押し出すようにする。
図28に示されるように、本出願に係る一実施例は、上記流体駆動機構を利用し、以下の四つのステップを含む流体駆動方法をさらに提供する。ステップ(1)では、三方切替弁124を介して、容積可変アセンブリ121の液体出入口1213を貯液タンク125に連通し、パワーアセンブリ122の連動により、ブッシュロッド1212に液体出入口1213から離れるシリンジ1211の一方端内を摺動させ、シリンジ1211の容積を変更し、貯液タンク125内の駆動液体1214をシリンジ1211に吸入する。ステップ(2)では、三方切替弁124を介して、容積可変アセンブリ121の液体出入口1213を液体吐出ピペットチップ110の入口端111に連通し、パワーアセンブリ122の連動により、ブッシュロッド1212に液体出入口1213に近接するシリンジ1211の一方端内を摺動させ、シリンジ1211の容積を変更し、シリンジ1211内、細管123内及び液体吐出ピペットチップ110内の気体を排出する。ステップ(3)では、液体吐出ピペットチップ110の出口端112を第一の液体190に進入し、三方切替弁124を介して容積可変アセンブリ121の液体出入口1213を液体吐出ピペットチップ110の入口端111に連通することを維持し、パワーアセンブリ122の連動により、ブッシュロッド1212に液体出入口1213から離れるシリンジ1211の一方端内を摺動させ、シリンジ1211の容積を変更し、第一の液体190を液体吐出ピペットチップ110に吸入する。ステップ(4)では、三方切替弁124を介して、容積可変アセンブリ121の液体出入口1213を液体吐出ピペットチップ110の入口端111に連通することを維持し、パワーアセンブリ122の連動により、ブッシュロッド1212に液体出入口1213から離れるシリンジ1211の一方端内を均一な速度で摺動させ、シリンジ1211の容積を変更し、液体吐出ピペットチップ110に貯留されている第一の液体190を均一な流速で液体吐出ピペットチップ110の出口端112から排出する。
上記第二のステップにシリンジ1211内の気体を順調に排出させるように、図27に示されるように、装着される時に、シリンジ1211の液体出入口1213が上向きにし、ブッシュロッド1212が垂直方向にシリンジ1211内を摺動するようにする。
微小液滴199を生成する効率を高めるために、一つの実施可能な形態として、液体吐出ピペットチップ110の数が複数であり、複数の液体吐出ピペットチップ110が並列に間隔配置され、又は、他の形式で配置されてもよい。各液体吐出ピペットチップ110は、いずれも、個別の細管123を介して、三方切替弁124の第一のポートに連通される。容積可変アセンブリ121の数は、一つであり、容積可変アセンブリ121の液体出入口1213が、三方切替弁124の第二のポートに連通される。三方切替弁124の第三のポートが、貯液タンク125に連通される。パワーアセンブリ122の駆動により、ブッシュロッド1212がシリンジ1211を液体出入口1213に近接する方向に沿って均一な速度で摺動すると共に、駆動液体1214を複数の液体吐出ピペットチップ110に押圧する。複数の細管123が並列接続されているため、各細管123内の駆動液体1214の流量が同じであり、複数の液体吐出ピペットチップ110内の第一の液体190を、同等かつ一定の流速で液体吐出ピペットチップ110の出口端112を排出することを確認することができ、さらに、生成された微小液滴199の体積の均一性を確認することができる。
微小液滴199を生成する効率を高めるために、他の一つの実施可能な形態として、液体吐出ピペットチップ110及び容積可変アセンブリ121の数は、いずれも複数である。複数の液体吐出ピペットチップ110が並列に間隔配置され、又は、他の形式で配置されてもよい。各液体吐出ピペットチップ110は、いずれも、個別の細管123を介して三方切替弁124の第一のポートに連通される。各容積可変アセンブリ121の液体出入口1213も、細管123を介して、三方切替弁124の第二のポートに連通される。三方切替弁124の第三のポートが貯液タンク125に連通される。複数の容積可変アセンブリ121が並列に間隔配置され、又は、他の形式で配置されてもよい。複数の容積可変アセンブリ121は、シリンジ1211から離れるブッシュロッド1212の一方端が対向して固定され、パワーアセンブリ122により同期に押し出される。パワーアセンブリ122の駆動により、複数のブッシュロッド1212がそれぞれのシリンジ1211を液体出入口1213に近接する方向に沿って均一な速度で摺動すると共に、駆動液体1214を複数の液体吐出ピペットチップ110まで押し出す。複数の細管123が並列接続されているため、各細管123内の駆動液体1214の流量が同じであり、複数の液体吐出ピペットチップ110内の第一の液体190を同等、かつ、一定の流速で液体吐出ピペットチップ110の出口端112から排出することを確保することができ、さらに、生成された微小液滴199の体積の均一性を確保することができる。
微小液滴199を生成する効率を高めるために、三番目の実施可能な形態として、図29に示されるように、液体吐出ピペットチップ110、容積可変アセンブリ121及び三方切替弁124は、それらの数が同じであり、かつ、いずれも複数である。各液体吐出ピペットチップ110の入口端111は、それぞれ、個別の細管123を介して、一つの三方切替弁124の第一のポートに連通される。各容積可変アセンブリ121の液体出入口1213は、個別の細管123を介して、一つの三方切替弁124の第二のポートに、それぞれ連通される。各三方切替弁124の第三のポートは、貯液タンク125に、それぞれ連通される。好ましくは、貯液タンク125が一つ又は複数である。各液体吐出ピペットチップ110内の第一の液体190は、同じでもよく異なってもよい。複数の容積可変アセンブリ121は、並列に間隔配置され、又は、他の形式で配置されてもよい。複数の容積可変アセンブリ121は、シリンジ1211から離れるブッシュロッド1212の一方端が対向して固定され、パワーアセンブリ122により同期に押し出される。パワーアセンブリ122の駆動により、複数のブッシュロッド1212は、それぞれのシリンジ1211を液体出入口1213に近接する方向に沿って均一な速度で摺動する。複数の異なる種類の微小液滴199を同時に生成することができる。
微小液滴199を生成する効率を高めるために、四番目の実施可能な形態として、液体吐出ピペットチップ110、容積可変アセンブリ121及び三方切替弁124は、それらの数が同じであり、かつ、いずれも複数である。各液体吐出ピペットチップ110の入口端111は、個別の細管123を介して、一つの三方切替弁124の第一のポートに、それぞれ連通される。各容積可変アセンブリ121の液体出入口1213は、個別の細管123を介して一つの三方切替弁124の第二のポートに連通される。各三方切替弁124の第三のポートは、貯液タンク125に、それぞれ連通される。好ましくは、貯液タンク125は一つの又は複数である。各液体吐出ピペットチップ110内の第一の液体190は、同じでもよく異なってもよい。複数の容積可変アセンブリ121は、並列に間隔配置され、他の形式で配置されてもよい。各容積可変アセンブリ121は、個別のパワーアセンブリ122に、それぞれ対応している。パワーアセンブリ122の駆動により、複数のブッシュロッド1212がそれぞれのシリンジ1211を液体出入口1213に近接する方向に沿って均一な速度で摺動する。複数の異なる種類の微小液滴199を同時に生成することができるだけでなく、各液体吐出ピペットチップ110により生成された微小液滴199の体積の均一性を確保できることを前提として、さらに、各種類の液滴195の体積を個別に制御することができ、複数の液体吐出ピペットチップ110の微小液滴199の生成状態を個別に制御することに役立つ。
従来の運動制御機構が使用される工程では、液体吐出ピペットチップの出口端と油相組成物との対向運動を正確に制御できず、生成された微小液滴の体積の均一性が比較的高くない。
このことに鑑み、液体吐出ピペットチップの注射/噴射法により微小液滴を生成する際に、従来の運動制御機構により液体吐出ピペットチップの出口端と油相組成物との対向運動を正確に制御できず、生成された微小液滴の体積の均一性が比較的高くないという課題について、液体吐出ピペットチップの出口端と油相組成物との対向運動を正確に制御できる運動制御機構を提供するニーズが存在している。
微小液滴199の生成工程では、液体吐出ピペットチップ110の出口端112は、瞬間加速度運動を含む周期的な運動を行うことから、微小液滴199を効果的に生成することができるだけでなく、生成された微小液滴199の寸法を便宜に制御することに役立つ。液体吐出ピペットチップ110の出口端112は、正弦波状に変位して周期的な運動を行うことから、微小液滴199を効果的に生成することができるだけでなく、生成された微小液滴199は、その体積がよい均一性を持っている。液体吐出ピペットチップ110の出口端112は、運動制御機構130の駆動により、瞬間加速度運動を含む周期的に運動、又は、正弦波状に変位して周期的な運動を行う。
図30に示されるように、本出願が提供する運動制御機構130は、支持フレーム131、接続手段132及び駆動素子を含む。接続手段132は、液体吐出ピペットチップ110に接続されるために用いられる。駆動素子は、支持フレーム131に固定され、接続手段132に動力伝達可能に接続される。液体吐出ピペットチップ110の出口端112は、駆動素子の駆動により、正弦波状に変化する変位又は方形波状に変化する速度で振動を行う。本出願が提供する運動制御機構130は、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で振動を行うように連動して微小液滴199を生成することにより、微小液滴199の生成効率が高く、しかも、均一性が高いという利点を持っている。本出願に係る運動制御機構130は、例えば、揺動シリンダや回転電気磁石137などの他の回転駆動装置が適用されてもよい。
本出願に係る一実施例では、駆動素子は、振動モーター133を含み、振動モーター133は、出力軸が接続手段132に動力伝達可能に接続されるガルバノミラーモーター(galvanometermotor)のタイプのものであることが好ましい。ガルバノミラーモーターは、安定かつ高速の往復揺動及び往復の直線動作を行うことが可能であり、しかも、揺動の幅及び周波数が要求に応じて設定され得るため、本出願に係る運動制御機構130を応用する範囲を大幅に拡大される。好ましくは、回転モーターは、ボイスコイルモーター又は圧電モーターが適用されている。さらに、振動モーター133は、クローズドループ制御の振動角度又は位置を有するモーターが適用されてもよい。クローズドループ制御の振動角度又は位置を有するモーターにより、液体吐出ピペットチップ110の出力端の振動を駆動することにより、液体吐出ピペットチップ110の揺動軌跡を正確に制御し、さらに、環境やシステムからの干渉をさらに低減することができる。
以下に、図31に基づいて、本願におけるクローズドループ制御の振動角度又は位置を有するモーターの応用について説明する。クローズドループ制御の振動角度又は位置を有するモーターは、赤外線位置センサー、制御回路及び信号処理回路などの部材を含む。本実施例では、運動制御機構130の回転軸に赤外線位置センサーを装着し、赤外線位置センサーにより、その検知された位置信号を制御回路にフィードバックし、制御回路により、PIDの自動化制御の原理に基づいてそれぞれフィードバックされた位置信号に対して比例、積分や微分の演算を処理すると共に、位置フィードフォワード及び速度リングや電流リングなどの信号処理回路を組み合わせて、モーターが運動する時に絶対位置への正確な制御を実現することができる。クローズドループ制御の振動角度又は位置を有するモーターを使用すると、複雑な負荷の環境の変化により他の振動モーター133の振動位置が変更されてしまうことを避け、プロジェクトでは液滴195に体積及び生成速度を正確に制御することに役立つ。
本出願に係る一実施例では、接続手段132は、継ぎ手1321を含む。継ぎ手1321は、振動モーター133の出力軸に動力伝達可能に接続される。継ぎ手1321は、中空の管状であり、一方端が液体吐出ピペットチップ110に接続され、他方端が液体吐出ピペットチップ110の流体制御機構に接続される。液体吐出ピペットチップ110に微小液滴199を生成するための第一の液体190が貯留されており、流体制御機構は、微小液滴199を生成する工程に液体吐出ピペットチップ110内の第一の液体190を所定流速で排出するということに役割を持っている。液体吐出ピペットチップ110に貯留されている第一の液体190は、流体制御機構の制御により、一定の流速で排出される。或いは、その流速は、規律性に変化してもよく、又は、他の種類の所定流速とされてもよい。本実施例では、液体吐出ピペットチップ110内の第一の液体190は、流体制御機構の制御により、一定の流速で液体吐出ピペットチップ110の出口端112から排出される。具体的に、流体制御機構は、その細管123が液体吐出ピペットチップ110から離れる継ぎ手1321の一方端に接続される。継ぎ手1321は、液体吐出ピペットチップ110と流体制御機構とを連通させると共に液体吐出ピペットチップ110が運動するように連動する役割を同時に果たす。一つの実施可能な形態として、継ぎ手1321は、液体吐出ピペットチップ110に接続されてから、液体吐出ピペットチップ110と同軸である。
液体吐出ピペットチップ110の着脱を便宜にするように、液体吐出ピペットチップ110に近接する継ぎ手1321の一方端は、その外縁が逆円錐台状であり、液体吐出ピペットチップ110が継ぎ手1321における逆円錐台状の一方端に周設される。液体吐出ピペットチップ110に近接する継ぎ手1321の一方端は、その外縁が逆円錐台状とされることから、液体吐出ピペットチップ110の着脱抵抗を低減すると共に、液体吐出ピペットチップ110の堅固な装着を便宜にすることができる。さらに、接続手段132は、接続軸1322を含み、接続軸1322は支持フレーム131に回転的に配置され、接続軸1322が振動モーター133に動力伝達可能に接続される。継ぎ手1321は、その数が複数であり、複数の継ぎ手1321は、間隔をあけて接続軸1322に固定配置される。一つの接続軸1322には、間隔をあけて複数の継ぎ手1321を装着し、複数の継ぎ手1321により複数の液体吐出ピペットチップ110を同時に装着できることから、微小液滴199の生成効率を大幅に高めることができる。
好ましくは、接続軸1322が支持フレーム131に回転可能に配置され、接続軸1322を含む両端は、支持フレーム131に回転可能に接続され、接続軸1322の他の位置は支持フレーム131に回転可能に接続される。本実施例では、接続軸1322は、両端が支持フレーム131に回転可能に配置され、一方端が振動モーター133に動力伝達可能に接続され、複数の継ぎ手1321は、接続軸1322の両端間に固定配置される。接続軸1322の両端は、支持手段に回転可能に配置されることから、回転軸全体に回転の安定性を高めることができる。一つの実施可能な形態として、接続軸1322の両端は、回転軸受により、支持フレーム131に回転可能に配置される。他の実施例では、回転及び伝動の条件が満たされている場合に、接続軸1322の他の位置を支持フレーム131に回転可能に配置してもよい。
継ぎ手1321は、接続軸1322に固定されると、継ぎ手1321の軸方向と接続軸1322の軸方向との夾角により、液体吐出ピペットチップ110の出口端112の運動軌跡及び運動速度を変更することができる。一つの実施可能な形態として、継ぎ手1321の軸方向と接続軸1322の軸方向とが互いに垂直している。継ぎ手1321の軸方向と接続軸1322の軸方向とが互い垂直しているように保持できれば、液体吐出ピペットチップ110が接続軸1322の回転を十分に利用して自体の振動を実現することに役立つ。さらに、複数の継ぎ手1321が、等間隔をあけて、接続軸1322の両端間に間隔配置される。等間隔をあけて間隔配置される液体吐出ピペットチップ110は、第二の液体699の液面下に振動している工程に、第二の液体699を均一に干渉して、各液体吐出ピペットチップ110が微小液滴199を生成する環境及び条件を同じくすることを確保することができる。
本出願に係る一実施例では、駆動素子が圧電セラミック135及び弾性手段136を含む。圧電セラミック135は、通電されて第一の方向に変形すると、接続手段132の継ぎ手1321が第一の方向に運動するように駆動し、接続手段132に接続される弾性手段136に弾性変形される。一方、圧電セラミック135は、通電されて第一の方向と反対方向に変形すると、弾性手段136は、弾性変形が回復されながら連動接続手段132の継ぎ手1321が第一の方向と反対方向に運動するように連動する。このように繰り返すと、接続手段132は、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で運動を行うように連動する。図32に示されるように、具体的に、圧電の方式により、液体吐出ピペットチップ110の出口端112が円弧の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行うことができる。継ぎ手1321は、軸受を介して支持フレーム131に回転可能に配置され、液体吐出ピペットチップ110が継ぎ手1321の一方端に周設され、液体吐出ピペットチップ110が軸受の軸心を中点として円弧の軌跡運動を行うことができる。継ぎ手1321が支持フレーム131に回転可能に接続される位置に、対称する延在板134を有し、延在板134の延在方向と継ぎ手1321の延在方向とが垂直している。駆動素子は、圧電セラミック135及び弾性手段136を含み、圧電セラミック135及び弾性手段136は、協働して接続手段132を駆動する。圧電セラミック135と弾性手段136とにより、駆動延在板134を介して、液体吐出ピペットチップ110の出口端112の急速な振動を実現することができる。圧電の方式によれば、構造が簡単であり、駆動の性能が安定であるという利点を持っている。
本出願に係る一実施例では、駆動素子は、電気磁石137、磁気手段138及び弾性手段136を含み、弾性手段136の一方端が支持フレーム131に固定配置され、接続手段132が弾性手段136の他方端に固定配置され、磁気手段138が接続手段132の継ぎ手1321に固定接続される。電気磁石137は、通電されて磁気手段138に第一の方向の力をかけると、磁気手段138及び接続手段132の継ぎ手1321が第一の方向に運動しながら、弾性手段136が弾性変形する。電気磁石137は、断電されると、弾性手段136により、接続手段132の継ぎ手1321及び磁気手段138が第一の方向と反対方向に運動するように連動する。電気磁石137への通断電を制御することにより、磁気手段138が、接続手段132を介して、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で運動を行うように連動する。
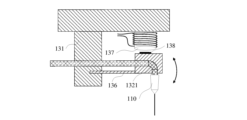
具体的に、図33に示されるように、電磁気の方式により、液体吐出ピペットチップ110の出口端112が円弧の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行うことができる。本実施例では、液体吐出ピペットチップ110の出口端112の運動軌跡は、平面円弧の水平セグメントと近い。弾性手段136は、一方端が支持フレーム131に固定され、他方端が継ぎ手1321に固定接続される。液体吐出ピペットチップ110は、継ぎ手1321の一方端に周設される。駆動素子は、電気磁石137及び磁気手段138を含み、磁気手段138が接続手段132に固定接続され、電気磁石137が磁気手段138により接続手段132を駆動する。電気磁石137は、支持フレーム131に固定配置されることから、電気磁石137に引き寄せられる磁気手段138が継ぎ手1321に固定配置され、電気磁石137と一緒に作動可能な距離に保持される。位置センサーが磁気手段138の運動位置を検知し、演算により液体吐出ピペットチップ110の出口端112の位置を算出することができる。電気磁石137は、通電されると、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に運動するように運動しながら、弾性手段136が弾性変形によりエネルギーを蓄積する。液体吐出ピペットチップ110の出口端112が電気磁石137に近接して第一の所定位置まで運動している時に、電気磁石137が断電される。液体吐出ピペットチップ110が弾性手段136の回復力により電気磁石137から離れる。液体吐出ピペットチップ110の出口端112が電気磁石137から離れ第二の所定位置まで運動すると、電気磁石137が通電される。電気磁石137は、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に運動するように連動しながら、弾性手段136が弾性変形によりエネルギーを蓄積する。このように繰り返す。具体的な状況に応じて、電気磁石137の動作パラメータ及び弾性手段136の弾性係数を調整し、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で振動を実現することができる。一つの実施可能な形態として、弾性手段136は、弾性鋼片、又は、その他の弾性要求が満たされるものが含まれてもよい。
図34に示されるように、本出願に係る一実施例では、電磁気の方式により、液体吐出ピペットチップ110の出口端112が円弧の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を実現することができる。本実施例では、液体吐出ピペットチップ110の出口端112の運動軌跡は、平面円弧の垂直セグメントと近い。弾性手段136は、一方端が支持フレーム131に固定され、他方端が継ぎ手1321に固定接続される。液体吐出ピペットチップ110は、継ぎ手1321の一方端に周設される。電気磁石137は、支持フレーム131に固定配置され、電気磁石137に引き寄せられる磁気手段138が継ぎ手1321に固定配置され、電気磁石137と一緒に動作可能な距離範囲に保持される。位置センサーは、磁気手段138の運動位置を検知し、演算により、液体吐出ピペットチップ110の出口端112の位置を算出することができる。電気磁石137は、通電されると、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に運動するように連動しながら、弾性手段136が弾性変形によりエネルギーを蓄積する。液体吐出ピペットチップ110の出口端112が電気磁石137に近接し、第一の所定位置まで運動している時に、電気磁石137が断電される。液体吐出ピペットチップ110が弾性手段136の回復力により電気磁石137から離れる。液体吐出ピペットチップ110の出口端112は、電気磁石137から離れ、第二の所定位置まで運動すると、電気磁石137が通電される。電気磁石137は、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に運動するように連動しながら、弾性手段136が弾性変形によりエネルギーを蓄積する。このように繰り返す。具体的な状況に応じて、電気磁石137の動作パラメータ及び弾性手段136の弾性係数を調整し、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で振動を実現することができる。一つの実施可能な形態として、弾性手段136は、弾性の鋼片、又は、その他の弾性要求が満たされるものが含まれてもよい。
本出願に係る一実施例では、駆動素子は、電気磁石137及び磁気手段138を含み、磁気手段138が接続手段132の継ぎ手1321に固定接続され、電気磁石137が変化磁界を生成し、磁気手段138が変化磁界を運動する。磁気手段138は、接続手段132を介して、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で運動を行うように連動する。
さらに、図35に示されるように、電気磁石137により、液体吐出ピペットチップ110の出口端112が円弧の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を実現することができる。継ぎ手1321は、軸受により、支持フレーム131に回転可能に配置され、液体吐出ピペットチップ110が継ぎ手1321の一方端に周設される。電気磁石137が支持フレーム131に固定配置されることから、電気磁石137に引き寄せられる磁気手段138が継ぎ手1321に固定配置され、電気磁石137と一緒に動作可能な距離範囲に保持される。位置センサーは、継ぎ手1321の回転角度を検知し、演算により、液体吐出ピペットチップ110の出口端112の位置を算出することができる。電気磁石137は、通電されると、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に運動するように連動し、液体吐出ピペットチップ110の出口端112が電気磁石137に近接し第一の所定位置まで運動すると、電気磁石137の通電方向が変えられる。液体吐出ピペットチップ110が電気磁石137の反力により電気磁石137から離れる。液体吐出ピペットチップ110の出口端112が電気磁石137から離れ、第二の所定位置まで運動すると、電気磁石137の通電方向が再度変えられる。電気磁石137は、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に運動するように連動する。このように繰り返す。具体的な状況に応じて、電気磁石137の動作パラメータを調整し、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で振動を実現することができる。
上記実施例では、振動モーター133が回転を出力し、液体吐出ピペットチップ110の出口端112が円弧の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行う。また、他の実施例では、液体吐出ピペットチップ110の出口端112が直線の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行ってもよい。
図36に示されるように、本出願に係る一実施例では、電気磁石137により、液体吐出ピペットチップ110の出口端112が直線の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行うことができる。本実施例では、液体吐出ピペットチップ110の出口端112は、水平面に直線軌跡で振動を行う。継ぎ手1321は、リニア軸受を介して、支持フレーム131に摺動可能に配置され、液体吐出ピペットチップ110が継ぎ手1321の一方端に周設される。電気磁石137は、支持フレーム131に固定配置されることから、電気磁石137に引き寄せられる磁気手段138は、継ぎ手1321に固定配置され、電気磁石137と一緒に動作可能な距離範囲に保持される。位置センサーは、継ぎ手1321の摺動位置を検知し、演算により、液体吐出ピペットチップ110の出口端112の位置を算出することができる。電気磁石137は、通電される時に、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に摺動ように連動する。液体吐出ピペットチップ110の出口端112が電気磁石137に近接し、第一の所定位置まで運動している時に、電気磁石137の通電方向が変えられる。液体吐出ピペットチップ110は、電気磁石137の反力により電気磁石137から離れるように摺動する。液体吐出ピペットチップ110の出口端112が電気磁石137から離れ、第二の所定位置まで運動している時に、電気磁石137の通電方向が再度変えられる。電気磁石137は、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に摺動するように連動する。このように繰り返す。具体的な状況に応じて、電気磁石137の動作パラメータを調整し、液体吐出ピペットチップ110の出口端112が、変位が正弦波状に変化し又は速度が方形波状に変化する振動を実現することができる。
図37に示されるように、本出願に係る一実施例では、電気磁石137により、液体吐出ピペットチップ110の出口端112が直線の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行う。本実施例では、液体吐出ピペットチップ110の出口端112は、垂直面に直線の軌跡で振動する。継ぎ手1321は、リニア軸受を介して、支持フレーム131に摺動可能に配置され、液体吐出ピペットチップ110が継ぎ手1321の一方端に周設される。電気磁石137は、支持フレーム131に固定配置され、電気磁石137に引き寄せられる磁気手段138が継ぎ手1321に固定配置され、電気磁石137と一緒に動作可能な距離範囲に保持される。位置センサーは、継ぎ手1321の摺動位置を検知し、演算により、液体吐出ピペットチップ110の出口端112の位置を算出することができる。電気磁石137は、通電される時に、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に摺動するように連動する。液体吐出ピペットチップ110の出口端112が電気磁石137に近接し、第一の所定位置まで運動している時に、電気磁石137の通電方向が変えられる。液体吐出ピペットチップ110は、電気磁石137の反力により電気磁石137から離れるように摺動する。液体吐出ピペットチップ110の出口端112が電気磁石137から離れ第二の所定位置まで運動すると、電気磁石137の通電方向が再度変えられる。電気磁石137は、磁気手段138を引き寄せ、液体吐出ピペットチップ110が電気磁石137に近接する方向に摺動するように連動する。このように繰り返す。具体的な状況に応じて、電気磁石137の動作パラメータを調整し、液体吐出ピペットチップ110の出口端112が、正弦波状に変化する変位又は方形波状に変化する速度で振動を実現することができる。
ガルバノミラーモーターは、往復リニア運動を出力することができる。本出願に係る他の実施例では、ガルバノミラーモーターにより、液体吐出ピペットチップ110の出口端112が直線の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行うように駆動する。
ガルバノミラーモーターは、往復リニア運動を出力することができる。本出願に係る他の実施例では、ガルバノミラーモーターにより、液体吐出ピペットチップ110の出口端112が直線の軌跡で、正弦波状に変化する変位又は方形波状に変化する速度で振動を行うように駆動する。
本出願が提供する微小液滴生成装置及び生成方法は、医学臨床検査、ナノ材料製造、食料品及び環境検査、生化学解析などの応用分野に幅広く応用される。一つの具体の適用例としては、本出願が提供する微小液滴199の生成装置及び生成方法がポリメラーゼ連鎖反応(PolymeraseChainReaction、PCR)に応用される。
従来の流体駆動機構及び流体駆動方法は、液体吐出ピペットチップを駆動しこれを運動させる時に排出された液体の流速が不安定であり、制御不可能であることにより、微小液滴の体積にランダム性が現れるという課題について、液体吐出ピペットチップが所定流速で液体を排出することを確保することができる流体駆動機構及び流体駆動方法を提供する。
図38-43に示されるように、本出願が提供する流体駆動機構120は、微小液滴生成システムにより微小液滴を生成する工程に、第一の液体吐出ピペットチップ830の出口端から排出された第三の液体820の流速及び流量を制御するために用いられる。本出願が提供する流体駆動機構120は、筐体100、第一の容積可変アセンブリ200及びリニアモーターアセンブリ300を含む。流体駆動機構120の筐体100は、支持という役割を同時に持ち、第一の容積可変アセンブリ200は、流体駆動工程の実行部であり、リニアモーターアセンブリ300は、流体駆動工程の駆動部であり、第一の容積可変アセンブリ200及びリニアモーターアセンブリ300は、両方でも筐体100に装着される。第一の容積可変アセンブリ200は、第一のシリンジ201及び第一のブッシュロッド202を含み、第一のシリンジ201の外壁が筐体100の内壁に固定装着され、第一のブッシュロッド202が第一のシリンジ201の内壁と摺動して協働し、言い換えると、第一のブッシュロッド202が第一のシリンジ201に摺動可能に装着される。第一のシリンジ201には、第一の駆動液体810を貯留可能であり、第一のシリンジ201が液体出入口を有し、液体出入口が第一の液体吐出ピペットチップ830の入口端に連通可能であり、第一の液体吐出ピペットチップ830には、第三の液体820が貯留される。リニアモーターアセンブリ300の出力端は、第一のブッシュロッド202に動力伝達可能に接続され、第一のブッシュロッド202が第一のシリンジ201の延在方向に沿って摺動するように駆動するために用いられる。微小液滴を生成する工程に、リニアモーターアセンブリ300の出力端は、第一のブッシュロッド202が第一のシリンジ201に貯留される第一の駆動液体810を押圧するように駆動し、そして、押圧された第一の駆動液体810が第一の液体吐出ピペットチップ830に貯留される第三の液体820を押圧し、最終的に、第三の液体820を第一の液体吐出ピペットチップ830の出口端から排出する。第三の液体820が第一の液体吐出ピペットチップ830から排出される流速及び流量は、リニアモーターアセンブリ300の出力端の運動状態に基づくものである。
上記流体駆動機構120は、第一の駆動液体810の非圧縮性により、第一の液体吐出ピペットチップ830の出口端が高周波数で振動している時でも、依然として、所定の流速及び流量で、第三の液体820を第一の液体吐出ピペットチップ830の出口端から排出することを確保することができる。リニアモーターアセンブリ300は、比較的高い運動精度を持っているのに加えて、液体排出速度や液体排出圧力などの実際の状況に応じて電流を自由に調整することにより、第一のブッシュロッド202が所定速度で摺動し又は所定距離だけ摺動することを確保することができ、そして、第三の液体820が所定の流速及び流量で第一の液体吐出ピペットチップ830の出口端から排出されることを正確に実現することができる。本出願が提供する流体駆動機構120によれば、生成された微小液滴の体積を正確に制御することができる。
本出願に係る第一のシリンジ201は、直筒状又は折り曲げ状であってもよい。第一のシリンジ201の液体出入口は、第一のシリンジ201の一方端又は中間位置に設けられてもよい。本出願は、第一のシリンジ201や第一のブッシュロッド202の具体的な構造及び両者の具体的な位置関係が限定されない。説明を便宜にするように、図41及び図42に示されるように、本出願は、直筒状である第一のシリンジ201であって、第一のシリンジ201の一方端に液体出入口が設けられ、第一のシリンジ201と摺動可能に装着される第一のブッシュロッド202が第一のシリンジ201の他方端を貫通する第一のシリンジ201を例として挙げた。しかしながら、本出願の他の実施例では、第一の容積可変アセンブリ200は、如何なる容積可変機能を実現可能な構造であってもよい。
本出願に係る一実施例では、図38-43に示されるように、リニアモーターアセンブリ300は、ボイスコイルモーター301を含み、ボイスコイルモーター301の一次側311が筐体100の内壁に固定装着され、ボイスコイルモーター301の二次側312が第一のブッシュロッド202に第一のブッシュロッド202の摺動方向に沿って固定接続される。ボイスコイルモーター301は、レスポンスが速く、速度が高く、加速度が高いという利点のみならず、構造が簡単であり、体積が小さく、制御が便宜であるという利点も持っている。ボイスコイルモーター301の二次側312は、電流を制御することにより、摺動の抵抗が増大し又は減少する時でも依然として所定の摺動速度を保持することができ、第三の液体820の液体の排出の圧力が変化する時でも依然として所定の液体の排出流速を手軽に保持することができる。ボイスコイルモーター301は、実際の状況に応じて、所定の摺動位置、所定の摺動速度又は所定の駆動圧力値などに従って動作することができ、そして、第一の容積可変アセンブリ200によれば、第三の液体820が所定の体積で第一の液体吐出ピペットチップ830から排出されること、所定の流速で第一の液体吐出ピペットチップ830から排出されること、又は、所定の排出圧力で第一の液体吐出ピペットチップ830から排出されることなどを正確に実現することができる。
さらに、図39-40に示されるように、ボイスコイルモーター301が第一のシリンジ201の片側に配置され、ボイスコイルモーター301の二次側312の摺動方向が第一のシリンジ201内の第一のブッシュロッド202の摺動方向と平行し、ボイスコイルモーター301の二次側312が第一のブッシュロッド202に動力伝達可能に接続される。ボイスコイルモーター301を第一のシリンジ201の片側に配置すると、第一のシリンジ201の延在方向に沿う流体駆動機構120の寸法を小さくすることができ、ボイスコイルモーター301の二次側312の摺動方向が第一のブッシュロッド202の摺動方向と同じであることは、ボイスコイルモーター301の二次側312と第一のブッシュロッド202との接続方式を簡素化することができる。一つの実施可能な形態として、図39-42に示されるように、リニアモーターアセンブリ300は、接続板302をさらに含み、接続板302は、一方端がボイスコイルモーター301の二次側312に固定接続され、他方端が第一のシリンジ201の外側に位置する第一のブッシュロッド202の一方端に固定接続される。理解可能なことは、接続板302が筐体100に可動に配置され、接続板302がボイスコイルモーター301の二次側312と同期に摺動し、そして、ボイスコイルモーター301の二次側312が接続板302により、第一のブッシュロッド202が第一のシリンジ201を同期に摺動するように連動する。他の実施例では、ボイスコイルモーター301の二次側312の摺動方向は、第一のブッシュロッド202の摺動方向と同軸に配置され、垂直配置され、又は、他の実施可能に配置されてもよい。
なお、さらに、図42-47に示されるように、ボイスコイルモーター301の二次側312は、ボビン3121及びコイル3122を含み、コイル3122がボビン3121に巻設され、ボビン3121と接続板302とが一体成形される。一体成形されたボビン3121及び接続板302により、さらに、ボイスコイルモーター301の二次側312と第一のブッシュロッド202との間に動作誤差が無くなり、第一のブッシュロッド202とボイスコイルモーター301の二次側312が同期に運動する精度を確保することができる。他の実施例では、ボイスコイルモーター301の二次側312と接続板302との接続は、ねじ、係合などの接続手段により固定接続を実現してもよい。本出願は、ボイスコイルモーター301の二次側312と接続板302との接続方式が限定されておらず、ボイスコイルモーター301の二次側312は、接続板302を介して第一のブッシュロッド202が同期に摺動するように連動することができればよい。
本出願に係る一実施例では、図40及び図42に示されるように、リニアモーターアセンブリ300は、ガイド手段303をさらに含み、ガイド手段303がガイドレール及びスライドブロックを含み、ガイドレールが筐体100に固定配置され、ガイドレールの延在方向と第一のブッシュロッド202の摺動方向とが平行し、スライドブロックがガイドレールに摺動的に配置され、スライドブロックが接続板302に固定接続される。ガイド手段303は、接続板302が摺動している工程に、ガイドという役割を持ち、ボイスコイルモーター301の二次側312が接続板302により第一のブッシュロッド202を連動して同期に摺動する工程に安定性を確保し、第三の液体820を所定の流量又は流速で第一の液体吐出ピペットチップ830から排出することを正確に制御することができる。さらに、リニアモーターアセンブリ300は、筐体100に配置されボイスコイルモーター301に電気接続される変位センサーをさらに含む。変位センサーは、同期に摺動するボイスコイルの二次側312、接続板302及び第一のブッシュロッド202の摺動位置や摺動速度などを検知するために用いられ、変位センサーは、ボイスコイルモーター301に電気接続され、ボイスコイルモーター301に対するクローズドループ制御を実現することができる。好ましくは、上記変位センサーは、ラスター式、磁気グリッド式、抵抗式又は差動変圧器式(LVDT)の変位センサーなどを含む。具体的に、変位センサーは、光電式リニア変位センサーとされる。本出願に係る他の実施例では、ボイスコイルモーター301自体がサーボモーターであり、ボイスコイルモーター301のクローズドループ制御システムがボイスコイルモーター301の内部に集積されることから、本出願が提供する流体駆動機構120の体積をより減少することができる。
本出願に係る一実施例では、図42-45に示されるように、ボイスコイルモーター301は、一次側311及び二次側312を含む。一次側311は、第一の磁気体対3111及び第二の磁気体対3112を含み、第一の磁気体対3111及び第二の磁気体対3112は、二次側312の摺動方向に沿って筐体100に順次配置され、第一の磁気体対3111における二つの磁気体の異なる磁極が対向配置され、第二の磁気体対3112における二つの磁気体の異なる磁極が対向配置され、第一の磁気体対3111間の磁気誘導線の方向と第二の磁気体対3112間の磁気誘導線の方向が反対している。二次側312は、ボビン3121及びコイル3122を含み、コイル3122がボビン3121に巻設され、コイル3122は、通電されると、電流方向が反対となる第一の段3125及び第二の段3126を有し、二次側312が摺動する時に、コイル3122の第一の段3125が第一の磁気体対3111間を摺動し、コイル3122の第二の段3126が第二の磁気体対3112間を摺動する。二つの対磁気体及びコイル3122は、コイル3122の第一の段3125及び第二の段3126に同じ方向かつ同じ大きい誘導力が同時に生成可能であり、ボイスコイルモーター301の二次側312が急速に動作することに役立ち、ボイスコイルモーター301に感度を高めることができる。
一つの実施可能な形態として、図43-45に示されるように、第一の磁気体対3111及び第二の磁気体対3112は、いずれも長方形板状の磁気体であり、第一の磁気体対3111及び第二の磁気体対3112は、いずれも筐体100の内壁に固定装着される。第一の磁気体対3111の一方端は、ボイスコイルモーター301の二次側312の摺動方向に沿って、第二の磁気体対3112の一方端に当接装着される。ボビン3121は、中空の丸角長方形であり、ボビン3121の一方端面に丸角長方形のリング状溝を設け、同様に中空の丸角長方形状とされるコイル3122もボビン3121のリング状溝に固定装着される。コイル3122は、電流が流れると、第一の段3125及び第二の段3126が同時に同じ方向かつ同じ大きい誘導力を生成し、第一の磁気体対3111及び第二の磁気体対3112が共に固定されているため、通電されたコイル3122が誘導力の方向に摺動し、コイル3122に固定されるボビン3121がコイル3122と共に同期に運動する。そして、ボイスコイルモーター301の二次側312は、接続板302を介して、第一のブッシュロッド202を連動して同期に運動する。変位センサーが第一のブッシュロッド202に同期に摺動する接続板302が所定位置まで摺動することを検知した時に、変位センサーが信号を送信し、ボイスコイルモーター301に断電され、ボイスコイルモーター301の二次側312が摺動を停止するようにする。又は、変位センサーが第一のブッシュロッド202に同期に摺動する接続板302が摺動速度で微細な波動を生成する時に、変位センサーが信号を送信し、ボイスコイルモーター301に流れる電流を併せて調整し、ボイスコイルモーター301の二次側312が接続板302により、第一のブッシュロッド202が所定速度で摺動するように連動することを確保し、第三の液体820を所定流速で第一の液体吐出ピペットチップ830から排出し、均一な微小液滴を生成することを実現することができる。本出願に係る他の実施例では、ボイスコイルモーター301は、他のタイプの構造であってもよい。
さらに、図43-44に示されるように、筐体100は、対向する第一の装着端面141及び第二の装着端面143を含み、第一の装着端面141及び第二の装着端面143に、それぞれ第一の装着孔142及び第二の装着孔144が設けられ、第一の装着孔142及び第二の装着孔144が対向配置される。ボイスコイルモーター301の一次側311は、第一の装着板3114及び第二の装着板3115をさらに含み、第一の装着板3114及び第二の装着板3115は、それぞれ、第一の装着孔142及び第二の装着孔144に着脱可能に固定される。第一の磁気体対3111における二つの磁気体は、それぞれ、二次側312の摺動方向に沿う第一の装着板3114及び第二の装着板3115の一方端に装着され、第二の磁気体対3112における二つの磁気体が二次側312の摺動方向に沿う第一の装着板3114及び第二の装着板3115の他方端に装着される。ボイスコイルモーター301は、筐体100から全体に取り外され、又は、組立が終わると全体として筐体100に装着されることから、ボイスコイルモーター301の組立精度を確保しボイスコイルモーター301の着脱の便宜性を高めることができる。一つの実施可能な形態として、第一の装着孔142及び第二の装着孔144は、いずれも丸角長方形孔であり、第一の装着板3114及び第二の装着板3115は、いずれも対応して丸角長方形板である。第一の装着板3114及び第二の装着板3115は、ねじにより、それぞれ、第一の装着孔142及び第二の装着孔144に固定される。第一の装着板3114及び第二の装着板3115が対向する両側面は、いずれも第一の磁気体対3111及び第二の磁気体対3112を装着する長方形溝を有し、第一の磁気体対3111及び第二の磁気体対3112は、第一の対装着板及び第二の対装着板の長方形溝内に装着される。
なお、さらに、筐体100が中空の長方体状であり、流体駆動機構120の第一の容積可変アセンブリ200及びリニアモーターアセンブリ300は、いずれも筐体100の内部に装着される。筐体100の一方端面に、接続孔が設けられ、複数の筐体100は、接続孔を介してベースに並列して装着される。複数の流体駆動機構120は、並列して装着されると、複数の微小液滴の生成工程を同時に制御することができ、微小液滴の生成効率を大幅に高めることができる。一つの実施可能な形態として、図38、39及び43に示されるように、流体駆動機構120の稼働工程では、筐体100が空間の垂直方向に対向する天井端面145及び底部端面140を有し、筐体100における第一のシリンジ201の延在方向及びボイスコイルモーター301における二次側312の摺動方向は、いずれも空間の垂直方向である。筐体100は、第一のシリンジ201からボイスコイルモーター301までの方向に対向する二つの側端面150を有し、また、筐体100は、第一の装着板3114から第二の装着板3115までの方向に対向する第一の装着端面141及び第二の装着端面143を有する。複数の流体装着機構は、並列して装着された時に、複数の筐体100の第一の装着端面141と第二の装着端面143との間に順次貼り付けられている。筐体100の接続孔は、それぞれ、筐体100の同じ片側の端面150に設けられ、又は、二つの側端面150に設けられる。筐体100は、いずれも、接続孔に螺合されるねじによりベースに固定装着される。一つの具体の実施例では、並列して延在する方向の筐体100の寸法は18mmであり、言い換えると、筐体100における対向する第一の装着端面141と第二の装着端面143との間の距離が18mmである。複数の流体駆動機構120は、並列して装着された後に、間隔距離が18mmの複数の試薬溝に、第三の液体820を所定の流速及び流量で第一の液体吐出ピペットチップ830から排出するように同時に制御し、微小液滴を効果的に生成することができる。本出願に係る他の実施例では、並列して装着された複数の流体駆動機構120間の距離は、複数の試薬溝間の間隔距離に合う可能であれば、他の大きさとされてもよい。
上記態様に係る流体駆動機構120に基づいて、本出願がさらに提供する流体駆動方法は、リニアモーターアセンブリ300は、第一のブッシュロッド202が第一のシリンジ201に貯留される第一の駆動液体810を押圧するように駆動するステップと、第一の駆動液体810は、第一の液体吐出ピペットチップ830に貯留される第三の液体820を押圧するステップと、第三の液体820は、第一の液体吐出ピペットチップ830の出口端から排出されるステップとを含む。上記流体駆動方法は、第一の駆動液体810の非圧縮性を利用して、第一の液体吐出ピペットチップ830の出口端が高周波数で振動する時でも依然として所定の流速及び流量で第三の液体820を第一の液体吐出ピペットチップ830の出口端から排出することを確保することができる。第一の駆動液体810と第三の液体820が互いに溶解されず、両者の物質の交換がされないということは理解可能である。一般的には、第一の駆動液体810の密度が第三の液体820の密度よりも小さい。好ましくは、第一の駆動液体810は、鉱油又はアルカンなどである。一つの実施可能な形態として、第一の液体吐出ピペットチップ830から排出される第三の液体820は、第一の駆動液体810を貯留している貯留容器へ落下し、貯留容器へ落下した第三の液体820は、第一の駆動液体810を落下する。リニアモーターアセンブリ300は、比較的高い運動精度を有するのみならず、液体排出速度や液体排出圧力などの実際の状況に応じて電流を自由に調整することにより、第一のブッシュロッド202が所定速度で摺動し又は所定距離だけ摺動することを確保することができ、第三の液体820を所定の流速及び流量で第一の液体吐出ピペットチップ830の出口端から正確に排出することを実現することができる。本出願が提供する流体駆動方法は、生成された微小液滴の体積を正確に制御することができる。
本出願に係る一実施例では、図40-41及び図48-49に示されるように、流体駆動機構120は、切替弁400をさらに含み、切替弁400は、第一の切替弁ポート411、第二の切替弁ポート412及び第三の切替弁ポート413を含み、第一の切替弁ポート411、第二の切替弁ポート412及び第三の切替弁ポート413は、それぞれ、第一の液体吐出ピペットチップ830の入口端、液体出入口及び第一の駆動液体810を貯留する貯液タンクに連通される。切替弁400は、動作する時に、第一の切替弁ポート411及び第二の切替弁ポート412に連通可能であり、又は、第三の切替弁ポート413及び第二の切替弁ポート412に連通可能である。切替弁400は、少なくとも、流体駆動機構120を制御して以下の二つのモードを実現することができる。一番目のモードでは、第一の容積可変アセンブリ200の液体出入口を第一の液体吐出ピペットチップ830の入口端に連通し、リニアモーターアセンブリ300の連動により、第一の容積可変アセンブリ200が第一の液体吐出ピペットチップ830に液体の駆動力をかけ、第一の液体吐出ピペットチップ830内の第三の液体820を第一の液体吐出ピペットチップ830の出口端から排出し、又は、第三の液体820を第一の液体吐出ピペットチップ830の出口端から第一の液体吐出ピペットチップ830に吸入する。二番目のモードでは、第一の容積可変アセンブリ200の液体出入口を貯液タンクに連通し、リニアモーターアセンブリ300の連動により、第一の容積可変アセンブリ200が貯液タンクにおける第一の駆動液体810を第一の容積可変アセンブリ200の第一のシリンジ201に吸入し、又は、第一の容積可変アセンブリ200における駆動液を貯液タンクに押し出す。
さらに、図48-49に示されるように、切替弁400が弁本体410及び連通ブロック420を含み、弁本体410が第一の切替弁ポート411、第二の切替弁ポート412及び第三の切替弁ポート413を含む。連通ブロック420には、互いに独立する第一の流路421、第二の流路422及び第三の流路423を設置し、第一の流路421、第二の流路422及び第三の流路423がいずれも連通ブロック420を貫通する。第一の流路421、第二の流路422及び第三の流路423は、一方端が第一の切替弁ポート411、第二の切替弁ポート412及び第三の切替弁ポート413にそれぞれ接続され、他方端が第一の液体吐出ピペットチップ830の入口端、液体出入口及び第一の駆動液体810を貯留する貯液タンクに接続される。一つ又は複数の流路を設置する連通ブロック420は、構造が簡単であり、連通が安定であるという利点を持っている。なお、さらに、第一の流路421、第二の流路422及び第三の流路423の内面は、それぞれ、研磨され丸角で遷移される。第一の流路421、第二の流路422及び第三の流路423の内面は、いずれにも死角がなく、気泡の残留や吸着を効果的に避けることができる。
上記態様における流体駆動機構120に基づいて、図50に示されるように、本出願がさらに提供するもう一つの流体駆動方法は、以下のステップを含む。ステップ(1)、切替弁400を介して、第一のシリンジ201の液体出入口を貯液タンクに連通し、リニアモーターアセンブリ300の連動により、第一のブッシュロッド202に第一のシリンジ201内を摺動させ、第一のシリンジ201の容積を変更し、貯液タンク内の第一の駆動液体810を第一のシリンジ201に吸入する。ステップ(2)、切替弁400を介して、第一のシリンジ201の液体出入口を第一の液体吐出ピペットチップ830の入口端に連通し、リニアモーターアセンブリ300の連動により、第一のブッシュロッド202が第一のシリンジ201内を摺動し、第一のシリンジ201の容積を変更し、第一のシリンジ201内及び第一の液体吐出ピペットチップ830内の気体を排出する。ステップ(3)、第一の液体吐出ピペットチップ830の出口端が第三の液体820に進入し、切替弁400を介して第一のシリンジ201の液体出入口を第一の液体吐出ピペットチップ830の入口端に連通することを維持し、リニアモーターアセンブリ300の連動により、第一のブッシュロッド202が第一のシリンジ201内を摺動し、第一のシリンジ201の容積を変更し、第三の液体820を第一の液体吐出ピペットチップ830に吸入する。ステップ(4)、切替弁400は、第一のシリンジ201の液体出入口に第一の液体吐出ピペットチップ830の入口端に連通し、リニアモーターアセンブリ300の連動により、第一のブッシュロッド202が第一のシリンジ201内を摺動し、第一のシリンジ201の容積を変更し、第一の液体吐出ピペットチップ830に貯留される第三の液体820を所定流速で第一の液体吐出ピペットチップ830の出口端を排出する。
さらに、上記流体駆動方法には、リニアモーターアセンブリ300が均一な速度で動作することにより、第一のブッシュロッド202が第一のシリンジ201を均一な速度で摺動するように連動し、最終的に、第一の駆動液体810又は第三の液体820が均一な流速で第一のシリンジ201に吸入し又は第一のシリンジ201から排出することを実現することができ、微小液滴を生成する工程全体の安定性及び生成された微小液滴の体積が均一であることを確保することができる。
一つの実施可能な形態として、図38-43に示されるように、筐体100は、中空の長方体状であり、切替弁400は、筐体100における底端面140と片側端面150に近接する位置に固定装着され、第一の容積可変アセンブリ200は、切替弁400における連通ブロック420の上方に装着される。ボイスコイルモーター301は、第一の容積可変アセンブリ200の側面に装着され、ボイスコイルモーター301の二次側312と第一の容積可変アセンブリ200とが接続板302を介して固定接続され、ガイド手段303が筐体100にボイスコイルモーター301と第一の容積可変アセンブリ200の第一のシリンジ201との間に装着される。流体駆動機構120は、電源ポート500をさらに含み、電源ポート500が筐体100の天井端面145に装着され、電源ポート500、ボイスコイルモーター301、切替弁400及び変位センサーはいずれも電気接続される。電源ポート500は、外部電源に電気接続され、流体駆動機構120内の素子に電力を提供してもよい。
上記の各実施例は、いずれも、医学臨床検査、ナノ材料製造、食料品及び環境検査、生化学解析などの応用分野に幅広く応用される。一つの具体的な適用例としては、本出願が提供する微小液滴199の生成装置及び生成方法がポリメラーゼ連鎖反応(PolymeraseChainReaction、PCR)に適用される。
以上の前記実施例の各技術的特徴は、任意に組み合わせることができ、記述を簡潔にするために、上記実施例における各技術的特徴のすべての可能な組合せを記述しなかったが、これらの技術的特徴の組合せは矛盾しない限り、本明細書に記載されている範囲に属されると考えられる。
以上の実施例は、本出願の幾つかの実施形態のみを詳細に且つ、具体的に示しているが、本出願の保護範囲を限定するものではないと理解すべきである。当業者にとって、本出願の創造的構想を逸脱しない前提で、幾つかの変形や改良を行うことができ、これらはすべて本出願の保護範囲に属するべきであると理解しなければならない。従って、本出願の保護範囲は、特許請求の範囲に記載された内容を基準とする。
最後に、本明細書では、部材の番号自体、例えば、「第一」、「第二」などは、説明対象を区別するためのみに使用され、順序や技術的な意味がない。また、本出願における「接続」や「連結」には、特に指定のない限り、直接接続と間接接続(連結)の両方が含まれる本出願の説明では、「上」、「下」、「前」、「後」、「左」、「右」、「垂直」、「水平」、「頂」、「底」、「内」、「外」、「時計回り」、「反時計回り」などの用語で示される方位又は位置関係は、図面で示される方位又は位置関係に基づいて、本出願の説明を容易にして説明を簡単にするためのものに過ぎず、言及された装置又は部品が必ず特定の方位を有し特定の方位で構造及び操作されることを指示又は示唆するものではないため、本発明を制限するものではないと理解されるべきある。
本明細書では、特に明示的に規定及び限定されていない限り、第一の特徴が第二の特徴の「上」又は「下」であるとは、第一の特徴が第二の特徴と直接接触するか、又は第一の特徴が第二の特徴と中間媒体を介して間接的に接触することを意味し得る。また、第一の特徴が第二の特徴の「上」、「上方」及び「上側」であるとは、第一の特徴が第二の特徴の直上又は斜め上方であるか、又は単に第二の特徴と比較して第一の特徴の水平高さが高いことを意味する。第一の特徴が第二の特徴の「下」、「下方」及び「下側」であるとは、第一の特徴が第二の特徴の直下又は斜め下方であるか、又は単に第二の特徴と比較して第一の特徴の水平高さが低いことを意味する。
本明細書では、第一や第二などのような関係用語は、ある実在物又は操作を別の実在物又は操作と区別するためにのみ使用され、これらの実在物又は操作の間にこのような実際の関係又は順序が存在することは、必ずしも必要でないか又は示唆されていない。また、用語の「備える」、「含む」又はその他の変形は、非排他的な包含をカバーすることを意図している。一連の要素を備える工程、方法、物品又は装置は、これらの要素だけでなく、明示的に列挙されていない他の要素も含むか、又はそのような工程、方法、物品又は装置に固有の要素も含む。より多くの制限がない場合、「を含む」という文で限定される要素は、その要素を含む工程、方法、物品又は装置における他の同じ要素の存在を排除するものではない。
本明細書の各実施例では、段階的に説明を行い、他の実施形態との相違点に着目して、実施例間で同じ又は類似の部分について互いに参照すれば良い。
開示された実施例の上記の説明により、当業者は、本出願を実施又は使用することができる。これらの実施例に対する様々な変更は当業者にとって自明である。本明細書で定義された一般的な原理は本出願の趣旨又は範囲を逸脱しない限り、他の実施例でも実施することができる。そのため、本出願は、本明細書に開示された実施例に限定されず、本明細書で開示された原理及び新たな特徴と一致している最も広い範囲に適合するべきである。