JP6809331B2 - 車両制御装置 - Google Patents
車両制御装置 Download PDFInfo
- Publication number
- JP6809331B2 JP6809331B2 JP2017062780A JP2017062780A JP6809331B2 JP 6809331 B2 JP6809331 B2 JP 6809331B2 JP 2017062780 A JP2017062780 A JP 2017062780A JP 2017062780 A JP2017062780 A JP 2017062780A JP 6809331 B2 JP6809331 B2 JP 6809331B2
- Authority
- JP
- Japan
- Prior art keywords
- control
- vehicle
- execution
- satisfied
- adaptive cruise
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/143—Speed control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4026—Cycles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/805—Azimuth angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/09—Other types of propulsion units, e.g. fluid motors, or type not specified
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/04—Traffic conditions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Regulating Braking Force (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- General Physics & Mathematics (AREA)
Description
アダプティブクルーズ制御(Adaptive Cruise Control: ACC)とは、自車両の前方に先行車両が存在しない場合は予め設定された設定速度で自車両を定速走行させ、先行車両が存在する場合は、予め設定された設定車間距離を維持しながら先行車両に追従するように自車両を加速又は減速する制御である。具体的には、先行車両が存在する場合のアダプティブクルーズ制御では、「先行車両までの車間距離と設定車間距離との偏差」及び「相対速度」に基づいて目標加速度を算出し、自車両の加速度が目標加速度に一致するように自車両を加速又は減速する。以下では、アダプティブクルーズ制御を「AC制御」とも称する。
・AC制御による先行車両の追従走行中に先行車両が減速したために自車両がAC制御による減速制御を実行している場合において、ドライバが操舵ハンドルを操作して先行車両を追い越そうとした結果、先行車両に接近してPCB制御の実行条件が成立する場合。
・AC制御による先行車両の追従走行中にカーブ路に差し掛かり先行車両が減速したために自車両がAC制御による減速制御を実行している場合において、カーブ路の脇に存在する歩行者又は自転車に接近してPCB制御の実行条件が成立する場合。
これらの場合、ドライバはAC制御が継続されることを期待しているので、違和感や不快感を覚えることが多い。
自車両(100)に搭載され、
前記自車両(100)の前方を走行する車両である先行車両(200)までの距離及び前記先行車両(200)に対する相対速度に基づいて目標加速度を算出し、前記自車両(100)の加速度が前記目標加速度に一致するように前記自車両(100)を加速させる加速制御及び前記自車両(100)を減速させる減速制御を行うことによって前記自車両(100)を前記先行車両(200)に対して追従走行させる先行車両追従制御を、アダプティブクルーズ制御として実行するアダプティブクルーズ制御手段と、
前記自車両(100)の進行方向を含む所定の範囲に位置する物標までの距離及び当該物標の相対速度に基づいて当該物標までの衝突予測時間(TTC)を算出し、且つ、
前記衝突予測時間(TTC)が所定の第1の閾値(TTCth1,TTCth2)未満であるとき前記自車両(100)に自動的に所定の第1制動力を付与する第1ブレーキ制御の実行条件が成立したと判定して当該第1ブレーキ制御を実行するプリクラッシュブレーキ制御手段と、
を備える。
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御の実行条件が成立したと判定されたとき、前記減速制御が実行されていれば当該実行条件の成立時における前記減速制御の前記目標加速度に関わらず前記アダプティブクルーズ制御の実行を継続し、前記減速制御が実行されていなければ前記アダプティブクルーズ制御の実行を停止するように構成され、
前記プリクラッシュブレーキ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御の実行条件が成立したと判定した場合に前記アダプティブクルーズ制御の実行が継続されるときには、前記第1ブレーキ制御を実行しないように構成されている。
自車両(100)に搭載され、
前記自車両(100)の前方を走行する車両である先行車両(200)までの距離及び前記先行車両(200)に対する相対速度に基づいて目標加速度を算出し、前記自車両(100)の加速度が前記目標加速度に一致するように前記自車両(100)を加速させる加速制御及び前記自車両(100)を減速させる減速制御を行うことによって前記自車両(100)を前記先行車両(200)に対して追従走行させる先行車両追従制御を、アダプティブクルーズ制御として実行するアダプティブクルーズ制御手段と、
前記自車両(100)の進行方向を含む所定の範囲に位置する物標までの距離及び当該物標の相対速度に基づいて当該物標までの衝突予測時間(TTC)を算出し、且つ、
前記衝突予測時間(TTC)が所定の第1の閾値(TTCth1,TTCth2)未満であるとき前記自車両(100)に自動的に所定の第1制動力を付与する第1ブレーキ制御の実行条件が成立したと判定して当該第1ブレーキ制御を実行するプリクラッシュブレーキ制御手段と、
を備える。
前記アダプティブクルーズ制御手段は、
前記自車両(100)のドライバによるアクセル操作に基づく要求加速度が前記目標加速度よりも大きい場合、更に、前記自車両(100)を前記アクセル操作に応じて加速させるアクセルオーバーライド制御を前記アダプティブクルーズ制御として実行し、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御の実行条件が成立したと判定されたとき、前記減速制御が実行されていれば当該実行条件の成立時における前記減速制御の前記目標加速度に関わらず前記アダプティブクルーズ制御の実行を継続し、前記アクセルオーバーライド制御が実行されていれば前記アダプティブクルーズ制御の実行を継続し、前記減速制御及び前記アクセルオーバーライド制御が何れも実行されていなければ前記アダプティブクルーズ制御の実行を停止する、
ように構成されている。
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間が前記第1の閾値未満であり且つ前記第1の閾値よりも小さい第2の閾値以上であるとき前記第1ブレーキ制御を実行し、
前記衝突予測時間が前記第2の閾値未満であるとき前記自車両に前記第1制動力よりも大きい第2制動力を付与する第2ブレーキ制御の実行条件が成立したと判定して当該第2ブレーキ制御を実行するように構成され、
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第2ブレーキ制御が開始された場合に前記アダプティブクルーズ制御の実行を停止する、
ように構成されている。
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間(TTC)が前記第1の閾値(TTCth1)未満である物標が前記先行車両(200)である場合、前記自車両(100)が前記先行車両(200)に衝突すると仮定したときに前記自車両(100)が前記自車両(100)の車幅方向において前記先行車両(200)に重なっている長さ(L)を前記自車両(100)の車幅(W)で除算することにより得られるラップ率(LR)が低いほど前記第2の閾値(TTCth3)が小さくなるように、前記第2の閾値(TTCth3)を変更するように構成されている。
自車両(100)に搭載され、
前記自車両(100)の前方を走行する車両である先行車両(200)までの距離及び前記先行車両(200)に対する相対速度に基づいて目標加速度を算出し、前記自車両(100)の加速度が前記目標加速度に一致するように前記自車両(100)を加速させる加速制御及び前記自車両(100)を減速させる減速制御を行うことによって前記自車両(100)を前記先行車両(200)に対して追従走行させる先行車両追従制御を、アダプティブクルーズ制御として実行するアダプティブクルーズ制御手段と、
前記自車両(100)の進行方向を含む所定の範囲に位置する物標までの距離及び当該物標の相対速度に基づいて当該物標までの衝突予測時間(TTC)を算出し、且つ、
前記衝突予測時間(TTC)が所定の第1の閾値(TTCth1,TTCth2)未満であるとき前記自車両(100)に自動的に所定の第1制動力を付与する第1ブレーキ制御の実行条件が成立したと判定して当該第1ブレーキ制御を実行するプリクラッシュブレーキ制御手段と、
を備える。
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御が開始された場合に前記アダプティブクルーズ制御の実行を停止し、且つ、
前記第1ブレーキ制御の前記実行条件が成立した時点において前記減速制御を実行していた場合、前記アダプティブクルーズ制御の実行中に開始された前記第1ブレーキ制御が終了したときに前記アダプティブクルーズ制御を自動的に再開する、
ように構成されている。
前記アダプティブクルーズ制御手段は、
前記自車両(100)のドライバによるアクセル操作に基づく要求加速度が前記目標加速度よりも大きい場合、前記自車両(100)を前記アクセル操作に応じて加速させるアクセルオーバーライド制御を前記アダプティブクルーズ制御として実行し、且つ、
前記第1ブレーキ制御の実行条件が成立した時点において前記アクセルオーバーライド制御が実行されていた場合、前記アダプティブクルーズ制御の実行中に開始された前記第1ブレーキ制御が終了したときに前記アダプティブクルーズ制御を自動的に再開する、
ように構成されている。
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間が前記第1の閾値(TTCth1、TTCth2)未満であり且つ前記第1の閾値(TTCth1、TTCth2)よりも小さい第2の閾値(TTCth3、TTCth4)以上であるとき前記第1ブレーキ制御を実行し、
前記衝突予測時間(TTC)が前記第2の閾値(TTCth3、TTCth4)未満であるとき前記自車両(100)に前記第1制動力よりも大きい第2制動力を付与する第2ブレーキ制御の実行条件が成立したと判定して当該第2ブレーキ制御を実行するように構成され、
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第2ブレーキ制御が開始された場合に前記アダプティブクルーズ制御の実行を停止し、且つ、
前記アダプティブクルーズ制御の実行中に開始された前記第2ブレーキ制御が終了したときには前記アダプティブクルーズ制御の実行を停止し続ける、
ように構成されている。
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間(TTC)が前記第1の閾値(TTCth1)未満である物標が前記先行車両(200)である場合、前記自車両(100)が前記先行車両(200)に衝突すると仮定したときに前記自車両(100)が前記自車両(100)の車幅方向において前記先行車両(200)に重なっている長さ(L)を前記自車両(100)の車幅(W)で除算することにより得られるラップ率(LR)が低いほど前記第2の閾値(TTCth3)が小さくなるように、前記第2の閾値(TTCth3)を変更するように構成されている。
以下、図1乃至図9を参照して第1実施形態に係る車両制御装置(以下、「第1実施装置」と称する。)について説明する。第1実施装置は、図1に示した車両100に適用される。車両100は、図示しないエンジンを動力源とする自動車である。図1に示すように、第1実施装置は、車両制御ECU10を備える。
ECU10は、ブレーキペダル操作量センサ13により検出されるブレーキペダル操作量及び車両100の他の運転状態量センサ(図示略)により検出される運転状態量に基づいてブレーキアクチュエータ20を操作する。ブレーキアクチュエータ20が操作されると各前輪及び各後輪に制動力が付与されるので車両100が減速度が変化する。
次に、第1実施装置の作動の概要について説明する。第1実施装置は、プリクラッシュセーフティーシステム(Pre Crash Safety system: PCS)を採用しており、所定の演算周期毎にプリクラッシュブレーキ制御(Pre Crash Brake Control: PCBC。以下、「PCB制御」とも称する。)を実行するか否かを判定する。第1実施装置のPCB制御は、車両100の進行方向を含む所定の範囲に、衝突予測時間が所定の時間閾値未満の物標が存在する場合に、車両100に所定の制動力を付与する制御である。
A.PCB制御
[自車両情報の取得]
まず、PCB制御について説明する。ECU10は、エンジンオン期間中、演算周期の経過毎に、センサ11乃至14並びにスイッチ17及び18から受信した信号に基づいて、車速、アクセルペダル操作量、ブレーキペダル操作量、ヨーレート、AC制御スイッチ17の状態及び車速・車間距離設定スイッチ18の状態(即ち、車両100の運転状態)を示す情報を自車両情報として取得する。加えて、ECU10は、車速及びヨーレートに基づいて車両100の進行方向を算出する。
ECU10は、エンジンオン期間中、演算周期の経過毎に、レーダーセンサ15から受信した信号とカメラ16から受信した信号に基づく画像データから、車両100の周囲に移動可能な物体(以下、単に「物体」と称する。)が存在するか否かを判定する。ECU10は、物体が存在すると判定した場合、車両100から物体までの距離及び車両100に対する物体の方位を算出する。加えて、物体の速度と車両100の車速に基づいて車両100に対する物体の相対速度を算出する。
ECU10は、エンジンオン期間中、演算周期の経過毎に、物標として検出された融合物体のそれぞれについて衝突予測時間(TTC: Time To Collision。以下、「TTC」とも称する。)を算出する。各物標についてのTTCは、各物標までの距離を各物標に対する車両100の相対速度で除算することにより算出され得る。物標が複数存在する場合、ECU10は、各物標についてのTTCを比較し、その中から最も小さいTTCを有する物標を選択し、その選択された物標について後述するPCB制御を実行するか否かを判定する。
まず、物標が他車両の場合におけるPB制御について説明する。ドライバ自身の運転操作により他車両との衝突を回避する方法としては、ドライバのブレーキ操作による衝突回避(以下、「ブレーキ回避」とも称する。)と、ドライバの操舵ハンドル操作による衝突回避(以下、「操舵回避」とも称する。)がある。PB制御は、ドライバのブレーキ操作又は操舵操作だけでは衝突を回避できない可能性が高い場合(即ち、衝突危険度が比較的に高い場合)に実行されることが望ましい。
次に、物標が他車両の場合におけるLPB制御について説明する。低ラップの場合においてTTCが操舵回避限界時間TS以上ブレーキ回避限界時間TB未満のときは、ブレーキ回避は困難であるため衝突可能性はあるものの、操舵回避は可能であるため衝突危険度は比較的に低い。このため、ECU10は、低ラップの場合においてTTCが操舵回避限界時間TS以上、且つ、ブレーキ回避限界時間TB未満のとき(即ち、ラップ率LR及びTTCが図3の二点鎖線と太線と「LR1を通り縦軸に平行な直線」とによって囲まれる領域内に位置しているとき)は、軽度の制動力を付与するLPB制御の実行条件が成立したと判定して、LPB制御を実行する。即ち、ECU10は、低ラップのときは二段階のPCB制御を実行する。
(条件1)LPB実行条件がAC制御の実行中に成立したと判定される。
(条件2)LPB実行条件が成立したと判定されたときにAC制御による減速制御が実行されている。
そこで、ECU10は、LPB実行条件が成立したと判定した場合に常にLPB制御を実行するのではなく、上記2つの条件1、2が成立する場合においてはLPB制御を実行しない。これにより、LPB制御がドライバに不要な制御と認識される可能性を低減しつつ、上記2つの条件が成立する場合であったとしても実際には回避操作必要状況であったときは、AC制御の減速制御による減速量を確保することができる。加えて、上記2つの条件の少なくとも一方が成立しない場合はLPB制御による減速量を確保することができる。
続いて、物標が歩行者又は自転車の場合におけるPB制御及びLPB制御について説明する。ECU10は、物標が歩行者又は自転車の場合、二段階のPCB制御を実行する。即ち、ECU10は、TTCが歩行者・自転車用のPB制御の時間閾値未満のときは、PB制御の実行条件が成立したと判定してPB制御を実行し、TTCが歩行者・自転車用のPB制御の時間閾値以上、且つ、歩行者・自転車用のLPB制御の時間閾値未満のときは、LPB制御の実行条件が成立したと判定してLPB制御を実行する。但し、ECU10は、物標が他車両の場合と同様に、LPB実行条件が成立したと判定した場合に常にLPB制御を実行するのではなく、上記2つの条件1、2が成立する場合においてはLPB制御を実行しない。
歩行者・自転車用のLPB制御の時間閾値及び歩行者・自転車用のPB制御の時間閾値は何れも一定の値を有しており、前者の値は第1時間閾値TTCth1よりも僅かに大きな値に設定される。なお、歩行者・自転車用のLPB制御の時間閾値及び歩行者・自転車用のPB制御の時間閾値はそれぞれ「第1の閾値」及び「第2の閾値」の一例に相当する。以下では、歩行者・自転車用のLPB制御の時間閾値及び歩行者・自転車用のPB制御の時間閾値をそれぞれ「第2時間閾値TTCth2」及び「第4時間閾値TTCth4」と称する。
上記の説明から明らかなように、ECU10は、物標が他車両の場合においてTTCが第1時間閾値TTCth1未満の場合、及び、物標が歩行者又は自転車の場合においてTTCが第2時間閾値TTCth2未満の場合、PCB制御の実行条件が成立していると判定する。一方、ECU10は、物標が他車両の場合においてTTCが第1時間閾値TTCth1以上の場合、及び、物標が歩行者又は自転車の場合においてTTCが第2時間閾値TTCth2以上の場合、PCB制御の実行条件が成立していないと判定する。
PCB制御の実行条件が成立しているとき、ECU10は、物標が他車両の場合において「低ラップ時にTTCが第3時間閾値TTCth3以上のとき」、及び、物標が歩行者又は自転車の場合において「TTCが第4時間閾値TTCth4以上のとき」は、LPB制御の実行条件が成立したと判定する。一方、PCB制御の実行条件が成立していないとき、又は、後述するPB制御の実行条件が成立しているときは、ECU10はLPB制御の実行条件が成立していないと判定する。
PCB制御の実行条件が成立しているとき、ECU10は、物標が他車両の場合において「低ラップ時にTTCが第3時間閾値TTCth3未満、又は、高ラップ時のとき」、及び、物標が歩行者又は自転車の場合において「TTCが第4時間閾値TTCth4未満のとき」はPB制御の実行条件が成立したと判定してPB制御を実行する。一方、PCB制御の実行条件が成立していないとき、又は、上述したLPB制御の実行条件が成立しているときは、ECU10はPB制御の実行条件が成立していないと判定してPB制御を実行しない。
[AC制御スイッチの状態]
次に、AC制御について説明する。ECU10は、エンジンオン期間中、演算周期の経過毎に、自車両情報として取得したAC制御スイッチ17の状態を表す情報がオン状態を示しているか否かを判定する。オン状態を示している場合、ECU10は、AC制御を実行する。
ECU10は、エンジンオン期間中、演算周期の経過毎に、物標として検出された融合物体の中に先行車両が存在するか否かを判定する。具体的には、ECU10は、レーダーセンサ15から受信した建造物の信号とカメラ16から取得した建造物の画像データとに基づいて道路形状を特定する。ECU10は、特定された道路形状に基づいて、車両100が走行している車線上において車両100の前方に他車両が存在するか否かを判定し、存在する場合、先行車両が存在すると判定し、存在しない場合、先行車両が存在しないと判定する。ECU10は、先行車両が存在すると判定した場合、AC制御の走行モードを追従走行モードに設定し、先行車両が存在しないと判定した場合、AC制御の走行モードを定速走行モードに設定する。本明細書が開示する発明は、走行モードが追従走行モードであること(先行車両が存在すること)が前提であるため、以下では、追従走行モードについて説明し、定速走行モードについては詳細な説明を省略する。ECU10は、先行車両までの距離及び相対速度を先行車両情報として取得する。
ECU10は、先行車両が存在する場合、エンジンオン期間中、演算周期の経過毎に、設定車間距離を維持しながら設定速度以下の速度で先行車両を追従走行するための目標加速度を算出する。設定車間距離及び設定速度は、車速・車間距離設定スイッチ18から自車両情報として取得した情報に基づいて決定される。目標加速度は、「先行車両までの距離(車間距離)と設定車間距離との偏差ΔD」及び「先行車両に対する車両100の相対速度VR」によって算出され得る。具体的には、目標加速度Gtgtは、以下の式に則って算出される。なお、K1及びK2は所定の正のゲイン(係数)である。
Gtgt=K1・ΔD+K2・VR
上記の説明から明らかなように、ECU10は、目標加速度が0未満の場合はAC制御による減速制御を実行する。AC制御判定では、AC制御による減速制御が実行されているか否かを示す情報を利用する。このため、第1実施装置では、当該情報を示すフラグであるAC減速制御フラグが設定される。ECU10は、AC制御による減速制御が実行されている場合、AC減速制御フラグの値を1に設定し、AC制御による減速制御が実行されていない場合(即ち、AC制御による加速制御(加速度0を含む)又は後述するアクセルオーバーライド制御が実行されている場合)、AC減速制御フラグの値を0に設定する。ECU10は、AC制御判定においてAC減速制御フラグの値を利用する。
AC制御による減速制御又はAC制御による加速制御中にドライバがアクセルペダルを踏み込むと、ECU10は、アクセルペダル操作量及び車速等に基づいてドライバのアクセル操作に基づく要求加速度を算出する。ECU10は、この要求加速度が上述した方法で算出された目標加速度を超えているか否かを判定し、超えている場合、車両100の加速度が要求加速度に一致するようにスロットルアクチュエータ19を制御する。これは、アクセルオーバーライド(AOR)制御と称される周知の制御である。即ち、ECU10は、要求加速度が目標加速度を超えている場合、AC制御による減速制御又はAC制御による加速制御に優先して、AOR制御を実行する。AC制御判定では、AOR制御が実行されているか否かを示す情報を利用する。このため、第1実施装置では、当該情報を示すフラグであるアクセルオーバーライド(AOR)フラグが設定される。ECU10は、AOR制御が実行されている場合、AORフラグの値を1に設定し、AOR制御が実行されていない場合、AORフラグの値を0に設定する。ECU10は、AC制御判定においてAORフラグの値を利用する。
次に、AC制御判定について説明する。AC制御判定は、AC制御の実行中にPCB制御(PB制御又はLPB制御の何れか)の実行条件が成立したと判定された場合、当該PCB制御を実行せずにAC制御を継続するか、当該PCB制御を実行してAC制御を停止するかを判定する処理である。このため、ECU10は、エンジンオン期間中、演算周期の経過毎に、PCB制御フラグが1であるか否かを判定し、PCB制御フラグ=1が成立すると判定した場合、AC制御判定を実施する。
次に、第1実施装置の制御フローについて説明する。第1実施装置の車両制御ECU10のCPUは、エンジンオン期間中、図5乃至図9にフローチャートにより示したルーチンを演算時間の経過毎に実行するようになっている。
ステップ502:CPUは、PCB制御フラグの値を設定する処理を行う。図5のルーチンでは、CPUは、ステップ502において、図6にフローチャートにより示したルーチンを実行する。即ち、CPUは、ステップ502に進むと、図6のステップ600から処理を開始し、以下のステップ602の処理を行う。
ステップ608:CPUは、ステップ606で取得された物標情報を有する物標のそれぞれについて、物標までの距離を相対速度で除算することにより、物標までの衝突予測時間(TTC)を算出し、ECU10のRAMに格納する。
ステップ610:CPUは、ステップ608で算出されたTTCのうち、最小のTTCを有する物標を選択し(以下、当該物標を「選択物標」とも称する。)、ステップ606でECU10のRAMに格納された物標情報のうち選択物標の物標情報を「選択物標情報」としてラベリングする。
ステップ810:CPUは、上述したようにして、設定車間距離を維持しながら設定速度以下の速度で先行車両を追従走行するための目標加速度を算出し、ECU10のRAMに格納する。
・PCB制御の対象が先行車両の場合
(条件a)LRth1≦LR<LRth2
(条件b)TTCth3≦TTC
・PCB制御の対象が歩行者又は自転車の場合
(条件c)TTCth4≦TTC
この構成によれば、ドライバがPCB制御が実行されることを想定していない可能性が高い場合はLPB制御による軽度な制動力が付与される又はLPB制御自体が実行されないため、ドライバの運転操作と干渉する度合いを低減できる。加えて、実際には回避操作必要状況であった場合には、LPB制御が実行される場合は車両100に軽度な制動力が付与されるため、制動力を全く付与しない構成と比較して一定量の減速量を確保でき、LPB制御が実行されない場合はAC制御の減速制御による減速量を確保できる。このため、何れの場合も適切に衝突回避又は衝突被害の軽減を実現できる。
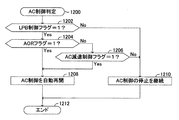
次に、第2実施形態に係る車両制御装置(以下、第2実施装置と称する。)について説明する。第2実施装置は、図5のステップ512のAC制御判定処理のみが第1実施装置と異なっている。具体的には、第1実施装置では、PCB制御の実行条件が成立したと判定されたときにAOR制御が実行されていると判定された場合、PCB制御の種類によらず、PCB制御が実行されてAC制御が停止される(図9のステップ901の「Yes」を参照)。これに対し、第2実施装置では、PCB制御の実行条件が成立したと判定されたときにAOR制御が実行されていると判定された場合に、PCB制御の種類がLPB制御であるときは、当該LPB制御が実行されずAC制御が継続される(後述する図10のステップ1004の「Yes」を参照)。以下、第2実施装置のAC制御判定処理(図5のステップ512を参照)について説明する。
ここで、第1実施装置では、PCB制御の実行条件が成立したと判定されたときにAOR制御が実行されていると判定された場合、PCB制御が実行されてAC制御が停止される。この構成が採用された理由は、AOR制御は加速制御であるためAC制御による減速量を確保することができず、たとえ衝突危険度が低い状況であっても十分な減速量を確保できない可能性があるからである。
加えて、第2実施装置では、PCB制御の実行条件が成立したと判定されたときにAOR制御が実行されていた場合において、制御対象が先行車両の場合は上記条件a及びbが成立するとき、又は、制御対象が歩行者又は自転車の場合は上記条件cが成立するときにも、PCB制御は実行されず、AC制御の実行が継続される。
PCB制御の実行条件が成立したと判定されたときにAOR制御が実行されている場合において、条件a及びbが成立するとき、又は、条件cが成立するときは、「ドライバが回避操作必要状況と認識していない状況」において、TTC<TTCth1(対象が先行車両の場合)、又はTTC<TTCth2(対象が歩行者又は自転車の場合)が成立する場合である可能性が高い。即ち、ドライバがPCB制御が実行されることを想定しておらず、AC制御の実行が継続されることを予期している場合である可能性が高い。第2実施装置によれば、このような場合にもPCB制御は実行されず、AC制御の実行が継続される。このため、ドライバに違和感や不快感を与える可能性をより低減することができる。
次に、第3実施形態に係る車両制御装置(以下、第3実施装置と称する。)について説明する。第3実施装置は、図5のステップ512のAC制御判定処理のみが第1実施装置と異なっている。具体的には、第3実施装置は、AC制御の実行中にPCB制御実行条件が成立した場合、PB制御又はLPB制御の何れかが必ず実行される点と、AC制御の実行中にPCB制御が開始された場合にAC制御の実行が停止される点と、LPB制御の実行条件が成立した時点においてAC制御による減速制御が実行されていた場合、LPB制御の実行後にAC制御が自動的に再開される点において、第1実施装置と異なっている。以下、第1実施装置との相違点について主に説明する。
第3実施装置は、追従走行モードのAC制御の実行中にPCB制御が開始された場合、AC制御の実行を停止する。そして、第3実施装置は、PCB制御の実行が終了したときにAC制御を自動的に再開するか否かを判定する。(AC制御判定)。PCB制御の実行後にAC制御を自動再開すると、ドライバが第3実施装置の性能を過信してPCB制御の実行後にブレーキ制御に介入しなくなる可能性がある。このため、衝突危険度が比較的に高いと予想される状況では、PCB制御の実行後もAC制御の停止を継続して、確実にドライバにブレーキ制御への介入を促すことが望ましい。従って、第3実施装置は、当該PCB制御がPB制御(即ち、衝突危険度が比較的に高い場合に実行される制御)の場合、PB制御だけでは不十分と判定して、PB制御の実行後にAC制御の停止を継続する。
D.PCB制御
[物標が他車両の場合におけるLPB制御]
低ラップの場合においてTTCが第3時間閾値TTCth3以上第1時間閾値TTCth1未満のときは、ブレーキ回避は困難であるため衝突可能性はあるものの、操舵回避は可能であるため衝突危険度は比較的に低い。このようなときにPB制御と同等の制動力を付与すると、ドライバが操舵ハンドル操作により衝突回避するつもりであった場合にドライバの運転操作と干渉してしまうため、ドライバに違和感、不快感を与えることになる。加えて、車両100が他車両を追い越すために車線変更する場合、車両100が他車両に対して車幅方向にずれるとともに他車両に一時的に接近し、その結果、低ラップとなるとともにTTCが第3時間閾値TTCth3以上第1時間閾値TTCth1未満になることがある。この場合も、PB制御と同等の制動力を付与すると、ドライバは他車両との衝突回避が必要な状況とは認識していないため、当該制動力の付与は不要な制御となり、ドライバに違和感、不快感を与えることになる。その一方で、これを解消するために制動力を一切付与しないとすると、実際はPCB制御が必要であった場合に十分な減速量を確保できなくなる。
ECU10は、TTCが第4時間閾値TTCth4未満のときは、PB制御の実行条件が成立したと判定してPB制御を実行し、TTCが第4時間閾値TTCth4以上、且つ、第2時間閾値TTCth2未満のときは、LPB制御の実行条件が成立したと判定してLPB制御を実行する。TTCが減少するにつれてLPB制御からPB制御に切り替える構成とすることにより、PCB制御がドライバに不要な制御と認識される可能性を低減しつつ、PCB制御が必要であった場合のための減速量を確保することができる。
ECU10は、PCB制御の実行条件が成立していると判定した場合、PCB制御フラグの値を1に設定し、PCB制御(即ち、PB制御又はLPB制御の何れか)を実行する。一方、ECU10は、PCB制御の実行条件が成立していないと判定した場合、PCB制御フラグの値を0に設定し、PCB制御を実行しない。即ち、PCB制御フラグの値が1であることは、第1実施装置ではPCB制御の実行条件が成立していることを意味したのに対し、第3実施装置ではPCB制御の実行条件が成立してPCB制御を実行することを意味する。
ECU10は、LPB制御の実行条件が成立していると判定した場合、LPB制御フラグの値を1に設定し、LPB制御を実行する。一方、ECU10は、LPB制御の実行条件が成立していないと判定した場合、LPB制御を実行しない。即ち、LPB制御フラグの値が1であることは、第1実施装置ではLPB制御の実行条件が成立していることを意味したのに対し、第3実施装置ではLPB制御の実行条件が成立してLPB制御を実行することを意味する。
AC制御判定は、AC制御の実行中にPCB制御(PB制御又はLPB制御の何れか)が開始された場合、当該PCB制御が終了したときにAC制御を自動的に再開するか否かを判定する処理である。このため、ECU10は、エンジンオン期間中、演算周期の経過毎に、PCB制御フラグが1であるか否かを判定し、PCB制御フラグ=1が成立すると判定した場合、AC制御判定を実施する。
ステップ512:CPUは、AC制御判定処理を行う。第3実施装置における図5のルーチンでは、CPUは、ステップ512に進むと、図11のステップ1100から処理を開始し、以下のステップ1101に進む。
・PCB制御の対象が先行車両の場合
(条件a)LRth1≦LR<LRth2
(条件b)TTCth3≦TTC
・PCB制御の対象が歩行者又は自転車の場合
(条件c)TTCth4≦TTC
次に、第4実施形態に係る車両制御装置(以下、第4実施装置と称する。)について説明する。第4実施装置は、図5のステップ512のAC制御判定処理のみが第3実施装置と異なっている。具体的には、第3実施装置では、PCB制御の実行条件が成立した時点においてAOR制御が実行されていると判定された場合、PCB制御の種類によらず、PCB制御の終了後はAC制御の停止が継続される(図11のステップ1101の「Yes」を参照)。これに対し、第4実施装置では、PCB制御の実行条件が成立した時点においてAOR制御が実行されていると判定された場合に、PCB制御の種類がLPB制御であるときは、当該LPB制御の終了後、AC制御が自動的に再開される(後述する図12のステップ1204の「Yes」を参照)。以下、第4実施装置のAC制御判定処理(図5のステップ512を参照)について説明する。
ここで、第3実施装置では、PCB制御の実行条件が成立した時点においてAOR制御が実行されていると判定された場合、PCB制御が終了したときは、PCB制御の種類によらずAC制御の停止が継続される。この構成が採用された理由は、AOR制御は加速制御であるためAC制御による減速量を確保することができず、たとえ衝突危険度が低い状況であっても十分な減速量を確保できない可能性があるからである。
加えて、第4実施装置では、PCB制御の実行条件が成立した時点においてAOR制御が実行されていた場合において、制御対象が先行車両の場合は上記条件a及びbが成立するとき、又は、制御対象が歩行者又は自転車の場合は上記条件cが成立するときにも、AC制御の実行中に開始されたPCB制御の終了後、AC制御が自動的に再開される。
PCB制御の実行条件が成立した時点においてAOR制御が実行されている場合において、条件a及びbが成立するとき、又は、条件cが成立するときは、ドライバが「PCB制御(LPB制御)が終了した後にもAC制御の実行が停止され続ける」ことを予期していない場合である可能性が高い。第4実施装置によれば、このような場合にもPCB制御の終了後にAC制御が自動的に再開される。このため、ドライバに違和感や不快感を与える可能性をより低減することができる。
Claims (8)
- 自車両に搭載され、
前記自車両の前方を走行する車両である先行車両までの距離及び前記先行車両に対する相対速度に基づいて目標加速度を算出し、前記自車両の加速度が前記目標加速度に一致するように前記自車両を加速させる加速制御及び前記自車両を減速させる減速制御を行うことによって前記自車両を前記先行車両に対して追従走行させる先行車両追従制御を、アダプティブクルーズ制御として実行するアダプティブクルーズ制御手段と、
前記自車両の進行方向を含む所定の範囲に位置する物標までの距離及び当該物標の相対速度に基づいて当該物標までの衝突予測時間を算出し、且つ、
前記衝突予測時間が所定の第1の閾値未満であるとき前記自車両に自動的に所定の第1制動力を付与する第1ブレーキ制御の実行条件が成立したと判定して当該第1ブレーキ制御を実行するプリクラッシュブレーキ制御手段と、
を備える車両制御装置において、
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御の実行条件が成立したと判定されたとき、前記減速制御が実行されていれば当該実行条件の成立時における前記減速制御の前記目標加速度に関わらず前記アダプティブクルーズ制御の実行を継続し、前記減速制御が実行されていなければ前記アダプティブクルーズ制御の実行を停止するように構成され、
前記プリクラッシュブレーキ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御の実行条件が成立したと判定した場合に前記アダプティブクルーズ制御の実行が継続されるときには、前記第1ブレーキ制御を実行しないように構成された、
車両制御装置。 - 自車両に搭載され、
前記自車両の前方を走行する車両である先行車両までの距離及び前記先行車両に対する相対速度に基づいて目標加速度を算出し、前記自車両の加速度が前記目標加速度に一致するように前記自車両を加速させる加速制御及び前記自車両を減速させる減速制御を行うことによって前記自車両を前記先行車両に対して追従走行させる先行車両追従制御を、アダプティブクルーズ制御として実行するアダプティブクルーズ制御手段と、
前記自車両の進行方向を含む所定の範囲に位置する物標までの距離及び当該物標の相対速度に基づいて当該物標までの衝突予測時間を算出し、且つ、
前記衝突予測時間が所定の第1の閾値未満であるとき前記自車両に自動的に所定の第1制動力を付与する第1ブレーキ制御の実行条件が成立したと判定して当該第1ブレーキ制御を実行するプリクラッシュブレーキ制御手段と、
を備える車両制御装置において、
前記アダプティブクルーズ制御手段は、
前記自車両のドライバによるアクセル操作に基づく要求加速度が前記目標加速度よりも大きい場合、更に、前記自車両を前記アクセル操作に応じて加速させるアクセルオーバーライド制御を前記アダプティブクルーズ制御として実行し、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御の実行条件が成立したと判定されたとき、前記減速制御が実行されていれば当該実行条件の成立時における前記減速制御の前記目標加速度に関わらず前記アダプティブクルーズ制御の実行を継続し、前記アクセルオーバーライド制御が実行されていれば前記アダプティブクルーズ制御の実行を継続し、前記減速制御及び前記アクセルオーバーライド制御が何れも実行されていなければ前記アダプティブクルーズ制御の実行を停止する、
ように構成された、
車両制御装置。 - 請求項1又は請求項2に記載の車両制御装置において、
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間が前記第1の閾値未満であり且つ前記第1の閾値よりも小さい第2の閾値以上であるとき前記第1ブレーキ制御を実行し、
前記衝突予測時間が前記第2の閾値未満であるとき前記自車両に前記第1制動力よりも大きい第2制動力を付与する第2ブレーキ制御の実行条件が成立したと判定して当該第2ブレーキ制御を実行するように構成され、
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第2ブレーキ制御が開始された場合に前記アダプティブクルーズ制御の実行を停止する、
ように構成された、
車両制御装置。 - 請求項3に記載の車両制御装置において、
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間が前記第1の閾値未満である物標が前記先行車両である場合、前記自車両が前記先行車両に衝突すると仮定したときに前記自車両が前記自車両の車幅方向において前記先行車両に重なっている長さを前記自車両の車幅で除算することにより得られるラップ率が低いほど前記第2の閾値が小さくなるように、前記第2の閾値を変更するように構成された、
車両制御装置。 - 自車両に搭載され、
前記自車両の前方を走行する車両である先行車両までの距離及び前記先行車両に対する相対速度に基づいて目標加速度を算出し、前記自車両の加速度が前記目標加速度に一致するように前記自車両を加速させる加速制御及び前記自車両を減速させる減速制御を行うことによって前記自車両を前記先行車両に対して追従走行させる先行車両追従制御を、アダプティブクルーズ制御として実行するアダプティブクルーズ制御手段と、
前記自車両の進行方向を含む所定の範囲に位置する物標までの距離及び当該物標の相対速度に基づいて当該物標までの衝突予測時間を算出し、且つ、
前記衝突予測時間が所定の第1の閾値未満であるとき前記自車両に自動的に所定の第1制動力を付与する第1ブレーキ制御の実行条件が成立したと判定して当該第1ブレーキ制御を実行するプリクラッシュブレーキ制御手段と、
を備える車両制御装置において、
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第1ブレーキ制御が開始された場合に前記アダプティブクルーズ制御の実行を停止し、且つ、
前記第1ブレーキ制御の前記実行条件が成立した時点において前記減速制御を実行していた場合、前記アダプティブクルーズ制御の実行中に開始された前記第1ブレーキ制御が終了したときに前記アダプティブクルーズ制御を自動的に再開する、
ように構成された、
車両制御装置。 - 請求項5に記載の車両制御装置において、
前記アダプティブクルーズ制御手段は、
前記自車両のドライバによるアクセル操作に基づく要求加速度が前記目標加速度よりも大きい場合、前記自車両を前記アクセル操作に応じて加速させるアクセルオーバーライド制御を前記アダプティブクルーズ制御として実行し、且つ、
前記第1ブレーキ制御の実行条件が成立した時点において前記アクセルオーバーライド制御が実行されていた場合、前記アダプティブクルーズ制御の実行中に開始された前記第1ブレーキ制御が終了したときに前記アダプティブクルーズ制御を自動的に再開する、
ように構成された、
車両制御装置。 - 請求項5又は請求項6に記載の車両制御装置において、
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間が前記第1の閾値未満であり且つ前記第1の閾値よりも小さい第2の閾値以上であるとき前記第1ブレーキ制御を実行し、
前記衝突予測時間が前記第2の閾値未満であるとき前記自車両に前記第1制動力よりも大きい第2制動力を付与する第2ブレーキ制御の実行条件が成立したと判定して当該第2ブレーキ制御を実行するように構成され、
前記アダプティブクルーズ制御手段は、
前記アダプティブクルーズ制御の実行中に前記第2ブレーキ制御が開始された場合に前記アダプティブクルーズ制御の実行を停止し、且つ、
前記アダプティブクルーズ制御の実行中に開始された前記第2ブレーキ制御が終了したときには前記アダプティブクルーズ制御の実行を停止し続ける、
ように構成された、
車両制御装置。 - 請求項7に記載の車両制御装置において、
前記プリクラッシュブレーキ制御手段は、
前記衝突予測時間が前記第1の閾値未満である物標が前記先行車両である場合、前記自車両が前記先行車両に衝突すると仮定したときに前記自車両が前記自車両の車幅方向において前記先行車両に重なっている長さを前記自車両の車幅で除算することにより得られるラップ率が低いほど前記第2の閾値が小さくなるように、前記第2の閾値を変更するように構成された、
車両制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062780A JP6809331B2 (ja) | 2017-03-28 | 2017-03-28 | 車両制御装置 |
| CN201810251309.6A CN108657177B (zh) | 2017-03-28 | 2018-03-26 | 车辆控制装置 |
| DE102018107208.2A DE102018107208B9 (de) | 2017-03-28 | 2018-03-27 | Fahrzeugsteuerungsvorrichtung |
| US15/938,593 US10752247B2 (en) | 2017-03-28 | 2018-03-28 | Vehicle control apparatus |
| US16/852,038 US11370432B2 (en) | 2017-03-28 | 2020-04-17 | Vehicle control apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017062780A JP6809331B2 (ja) | 2017-03-28 | 2017-03-28 | 車両制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018165085A JP2018165085A (ja) | 2018-10-25 |
| JP6809331B2 true JP6809331B2 (ja) | 2021-01-06 |
Family
ID=63524499
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017062780A Active JP6809331B2 (ja) | 2017-03-28 | 2017-03-28 | 車両制御装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10752247B2 (ja) |
| JP (1) | JP6809331B2 (ja) |
| CN (1) | CN108657177B (ja) |
| DE (1) | DE102018107208B9 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037804A (ja) * | 2019-09-02 | 2021-03-11 | トヨタ自動車株式会社 | 衝突回避支援装置 |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11208103B2 (en) * | 2017-05-24 | 2021-12-28 | Honda Motor Co., Ltd. | Vehicle control device |
| JP6950318B2 (ja) * | 2017-07-18 | 2021-10-13 | 株式会社デンソー | 車両制御システム |
| US20190135276A1 (en) * | 2017-11-03 | 2019-05-09 | Mando Corporation | Vehicle control system and method |
| JP6600889B2 (ja) * | 2017-12-13 | 2019-11-06 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| KR102120650B1 (ko) * | 2018-04-25 | 2020-06-26 | 주식회사 만도 | 차량 충돌 회피 제어 장치 및 그 제어 방법 |
| US10745007B2 (en) * | 2018-06-08 | 2020-08-18 | Denso International America, Inc. | Collision avoidance systems and methods |
| EP3626582B1 (en) * | 2018-09-18 | 2023-08-09 | Volvo Car Corporation | Method and system for collision avoidance |
| JP6700359B2 (ja) * | 2018-09-26 | 2020-05-27 | 株式会社Subaru | 車両制御装置 |
| JP7275639B2 (ja) * | 2019-02-25 | 2023-05-18 | トヨタ自動車株式会社 | 運転支援装置 |
| JP7176467B2 (ja) * | 2019-04-24 | 2022-11-22 | トヨタ自動車株式会社 | 車両走行制御装置 |
| KR102805131B1 (ko) * | 2019-07-25 | 2025-05-12 | 엘지전자 주식회사 | 차량 단말 및 그의 동작 방법 |
| JP7207256B2 (ja) * | 2019-10-15 | 2023-01-18 | トヨタ自動車株式会社 | 車両制御システム |
| DE102020204081A1 (de) * | 2019-11-14 | 2021-05-20 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Betreiben eines fahrpedalgesteuerten Abstandsreglers eines Fahrzeugs und Steuergerät |
| US20210237699A1 (en) * | 2020-02-05 | 2021-08-05 | Ford Global Technologies, Llc | Alternating braking method for smooth stopping from adaptive cruise control |
| JP2021133891A (ja) * | 2020-02-28 | 2021-09-13 | いすゞ自動車株式会社 | 運転支援装置及び運転支援方法 |
| KR102323483B1 (ko) * | 2020-04-13 | 2021-11-10 | 주식회사 만도모빌리티솔루션즈 | 스마트 순항 제어 시스템 및 그 제어 방법 |
| CN115397710A (zh) * | 2020-04-17 | 2022-11-25 | 三菱电机株式会社 | 车辆行驶控制装置 |
| JP2022018618A (ja) * | 2020-07-16 | 2022-01-27 | トヨタ自動車株式会社 | 車両制御装置 |
| CN112230657B (zh) * | 2020-10-15 | 2024-03-29 | 广州大学 | 面向智能车辆的区域协同驾驶意图调度方法、系统和介质 |
| CN114715087B (zh) * | 2021-01-04 | 2023-05-09 | 广州汽车集团股份有限公司 | 车辆的自动制动方法、装置、系统及存储介质 |
| JP7540385B2 (ja) | 2021-04-13 | 2024-08-27 | 株式会社デンソー | 車両用制御装置 |
| JP7690891B2 (ja) * | 2022-01-18 | 2025-06-11 | トヨタ自動車株式会社 | 追越し制御方法 |
| JP2023107672A (ja) * | 2022-01-24 | 2023-08-03 | 株式会社Subaru | 車両の運転支援装置 |
| CN114212079B (zh) * | 2022-02-18 | 2022-05-20 | 国汽智控(北京)科技有限公司 | 基于acc的车辆控制方法、装置及系统 |
| US12420819B2 (en) * | 2023-01-25 | 2025-09-23 | Toyota Jidosha Kabushiki Kaisha | Increasing operator confidence of an active driving automation system by modifying longitudinal vehicle dynamics |
| JP7524986B1 (ja) | 2023-02-22 | 2024-07-30 | いすゞ自動車株式会社 | 発電制御装置、発電制御方法及びプログラム |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2156001B2 (de) * | 1971-11-11 | 1975-10-16 | Daimler-Benz Ag, 7000 Stuttgart | Abstandswarnvorrichtung für Fahrzeuge |
| JP3569926B2 (ja) * | 1993-03-03 | 2004-09-29 | 株式会社デンソー | 車両走行制御装置 |
| DE10015303B4 (de) * | 2000-03-28 | 2016-11-03 | Robert Bosch Gmbh | Verfahren zum Abbrechen eines Bremseingriffs eines Abstandsregelsystems eines Kraftfahrzeugs |
| JP3788240B2 (ja) * | 2001-01-18 | 2006-06-21 | 日産自動車株式会社 | 車両用追従走行制御装置 |
| JP3646660B2 (ja) * | 2001-03-26 | 2005-05-11 | 日産自動車株式会社 | 車両用追従走行制御装置 |
| JP3893912B2 (ja) * | 2001-07-18 | 2007-03-14 | 株式会社日立製作所 | 車両制御装置 |
| JP2003039980A (ja) * | 2001-07-31 | 2003-02-13 | Nissan Motor Co Ltd | 車両用走行制御装置 |
| JP2003063272A (ja) * | 2001-08-30 | 2003-03-05 | Hitachi Ltd | 車両の自動速度制御装置 |
| JP3891011B2 (ja) * | 2002-03-12 | 2007-03-07 | 株式会社デンソー | クルーズ制御装置、プログラム |
| JP3775353B2 (ja) * | 2002-06-19 | 2006-05-17 | 日産自動車株式会社 | 先行車追従制御装置 |
| JP2004217175A (ja) | 2003-01-17 | 2004-08-05 | Toyota Motor Corp | 車間距離制御装置 |
| JP2004255928A (ja) | 2003-02-24 | 2004-09-16 | Denso Corp | 車両制御装置 |
| JP3948416B2 (ja) * | 2003-02-27 | 2007-07-25 | 株式会社デンソー | 衝突回避制御装置 |
| WO2005005206A1 (en) * | 2003-07-11 | 2005-01-20 | Toyota Jidosha Kabushiki Kaisha | Crash-safe vehicle control system |
| JP2006290328A (ja) * | 2005-03-16 | 2006-10-26 | Nissan Motor Co Ltd | 先行車追従制御装置 |
| JP4862516B2 (ja) * | 2006-06-26 | 2012-01-25 | トヨタ自動車株式会社 | 車両の減速制御装置 |
| JP4558754B2 (ja) * | 2007-03-08 | 2010-10-06 | 株式会社デンソー | 車両制御装置 |
| JP2008296887A (ja) * | 2007-06-04 | 2008-12-11 | Denso Corp | 車両制御装置 |
| DE102007060862B4 (de) | 2007-12-18 | 2021-08-12 | Man Truck & Bus Se | Notbremsassistenzsystem |
| JP2009220630A (ja) * | 2008-03-13 | 2009-10-01 | Fuji Heavy Ind Ltd | 車両の走行制御装置 |
| JP2012051441A (ja) * | 2010-08-31 | 2012-03-15 | Toyota Motor Corp | 自動運転車両制御装置 |
| US8577592B2 (en) * | 2011-05-19 | 2013-11-05 | GM Global Technology Operations LLC | Vehicle collision warning system and method of operating the same |
| JP5923875B2 (ja) * | 2011-06-14 | 2016-05-25 | トヨタ自動車株式会社 | 車両制御装置 |
| US9771070B2 (en) * | 2011-12-09 | 2017-09-26 | GM Global Technology Operations LLC | Method and system for controlling a host vehicle |
| JP5569550B2 (ja) * | 2012-03-30 | 2014-08-13 | 株式会社アドヴィックス | 車両の制動制御装置及び車両の制動制御方法 |
| US8731742B2 (en) * | 2012-04-05 | 2014-05-20 | GM Global Technology Operations LLC | Target vehicle movement classification |
| WO2014178264A1 (ja) * | 2013-04-30 | 2014-11-06 | 日産自動車株式会社 | 車両制御装置及び車両制御方法 |
| US9085236B2 (en) * | 2013-05-09 | 2015-07-21 | Robert Bosch Gmbh | Adaptive cruise control with stationary object recognition |
| JP6136714B2 (ja) * | 2013-07-30 | 2017-05-31 | トヨタ自動車株式会社 | 車両制御装置 |
| JP6011489B2 (ja) * | 2013-08-26 | 2016-10-19 | トヨタ自動車株式会社 | 車載制御装置 |
| JP6384416B2 (ja) * | 2015-07-10 | 2018-09-05 | トヨタ自動車株式会社 | 車両制御装置 |
| US20180211546A1 (en) * | 2015-08-26 | 2018-07-26 | Peloton Technology, Inc. | Devices, systems, and methods for authorization of vehicle platooning |
| JP6491596B2 (ja) | 2015-12-25 | 2019-03-27 | 株式会社デンソー | 車両制御装置及び車両制御方法 |
| JP6524922B2 (ja) * | 2016-01-12 | 2019-06-05 | 株式会社デンソー | 運転支援装置、運転支援方法 |
-
2017
- 2017-03-28 JP JP2017062780A patent/JP6809331B2/ja active Active
-
2018
- 2018-03-26 CN CN201810251309.6A patent/CN108657177B/zh active Active
- 2018-03-27 DE DE102018107208.2A patent/DE102018107208B9/de active Active
- 2018-03-28 US US15/938,593 patent/US10752247B2/en active Active
-
2020
- 2020-04-17 US US16/852,038 patent/US11370432B2/en active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037804A (ja) * | 2019-09-02 | 2021-03-11 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP7140077B2 (ja) | 2019-09-02 | 2022-09-21 | トヨタ自動車株式会社 | 衝突回避支援装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108657177B (zh) | 2021-02-23 |
| US20200238988A1 (en) | 2020-07-30 |
| DE102018107208B4 (de) | 2021-10-14 |
| DE102018107208A1 (de) | 2018-10-04 |
| DE102018107208B9 (de) | 2021-12-09 |
| CN108657177A (zh) | 2018-10-16 |
| JP2018165085A (ja) | 2018-10-25 |
| US20180281791A1 (en) | 2018-10-04 |
| US10752247B2 (en) | 2020-08-25 |
| US11370432B2 (en) | 2022-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6809331B2 (ja) | 車両制御装置 | |
| US11415995B2 (en) | Control device for vehicle and control method of vehicle | |
| JP6596772B2 (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JP2008296887A (ja) | 車両制御装置 | |
| CN113942499B (zh) | 碰撞躲避辅助装置 | |
| US11932243B2 (en) | Vehicle control device and control method | |
| JP2022024322A (ja) | 衝突回避支援装置 | |
| JP2019153039A (ja) | 車両制御装置 | |
| US20210370924A1 (en) | Driving assistance apparatus | |
| CN114852065B (zh) | 车辆控制装置 | |
| JP2017033152A (ja) | 車両の運転支援装置 | |
| JP7222343B2 (ja) | 運転支援装置 | |
| JP7226011B2 (ja) | 運転支援装置 | |
| JP7494830B2 (ja) | 車両運転支援装置、車両運転支援方法、車両運転支援プログラム及び車両運転支援装置を備えた車両 | |
| JP7569227B2 (ja) | 車両衝突回避支援装置 | |
| JP7571842B2 (ja) | 運転支援装置及び通知装置 | |
| JP7647644B2 (ja) | 運転支援装置、運転支援方法及び運転支援プログラム | |
| JP2022113287A (ja) | 車両衝突回避支援装置 | |
| JP7694335B2 (ja) | 車両制御システム | |
| JP7343840B2 (ja) | 車両制御装置 | |
| JP2021086421A (ja) | 運転支援装置 | |
| JP7700718B2 (ja) | 減速支援装置 | |
| JP7294160B2 (ja) | 車両制御システム | |
| JP5310086B2 (ja) | 車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190724 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200605 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200825 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20201110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20201123 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6809331 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |