JP6479760B2 - 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 - Google Patents
車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 Download PDFInfo
- Publication number
- JP6479760B2 JP6479760B2 JP2016503287A JP2016503287A JP6479760B2 JP 6479760 B2 JP6479760 B2 JP 6479760B2 JP 2016503287 A JP2016503287 A JP 2016503287A JP 2016503287 A JP2016503287 A JP 2016503287A JP 6479760 B2 JP6479760 B2 JP 6479760B2
- Authority
- JP
- Japan
- Prior art keywords
- bus
- power
- energy
- energy storage
- storage device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 40
- 238000004146 energy storage Methods 0.000 claims description 149
- 239000000725 suspension Substances 0.000 claims description 116
- 238000007726 management method Methods 0.000 claims description 22
- 238000004891 communication Methods 0.000 claims description 16
- 230000033001 locomotion Effects 0.000 claims description 11
- 238000012546 transfer Methods 0.000 claims description 9
- 238000012544 monitoring process Methods 0.000 claims description 6
- 230000000670 limiting effect Effects 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 description 25
- 230000001172 regenerating effect Effects 0.000 description 23
- 239000003990 capacitor Substances 0.000 description 15
- 230000002829 reductive effect Effects 0.000 description 14
- 230000008859 change Effects 0.000 description 10
- 230000006870 function Effects 0.000 description 10
- 230000004044 response Effects 0.000 description 10
- 230000009471 action Effects 0.000 description 7
- 230000008929 regeneration Effects 0.000 description 7
- 238000011069 regeneration method Methods 0.000 description 7
- 230000008901 benefit Effects 0.000 description 5
- 230000009977 dual effect Effects 0.000 description 5
- 230000002457 bidirectional effect Effects 0.000 description 4
- 238000004422 calculation algorithm Methods 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000011084 recovery Methods 0.000 description 4
- 238000013016 damping Methods 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- 238000013500 data storage Methods 0.000 description 2
- 238000005265 energy consumption Methods 0.000 description 2
- 230000000116 mitigating effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000002441 reversible effect Effects 0.000 description 2
- 230000011664 signaling Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 239000002253 acid Substances 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 230000003466 anti-cipated effect Effects 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000004064 dysfunction Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- GELKBWJHTRAYNV-UHFFFAOYSA-K lithium iron phosphate Chemical compound [Li+].[Fe+2].[O-]P([O-])([O-])=O GELKBWJHTRAYNV-UHFFFAOYSA-K 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000004513 sizing Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images





























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L1/00—Supplying electric power to auxiliary equipment of vehicles
- B60L1/003—Supplying electric power to auxiliary equipment of vehicles to auxiliary motors, e.g. for pumps, compressors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/12—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries responding to state of charge [SoC]
- B60L58/13—Maintaining the SoC within a determined range
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L58/00—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles
- B60L58/10—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries
- B60L58/18—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries of two or more battery modules
- B60L58/20—Methods or circuit arrangements for monitoring or controlling batteries or fuel cells, specially adapted for electric vehicles for monitoring or controlling batteries of two or more battery modules having different nominal voltages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/10—Dynamic electric regenerative braking
- B60L7/14—Dynamic electric regenerative braking for vehicles propelled by ac motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L7/00—Electrodynamic brake systems for vehicles in general
- B60L7/20—Braking by supplying regenerated power to the prime mover of vehicles comprising engine-driven generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
- B60L2210/12—Buck converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2210/00—Converter types
- B60L2210/10—DC to DC converters
- B60L2210/14—Boost converters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/52—Drive Train control parameters related to converters
- B60L2240/529—Current
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/50—Control modes by future state prediction
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Description
この出願は、米国特許法第120条の下で、2014年3月14日に出願された「VEHICULAR HIGH POWER ELECTRICAL SYSTEM」と称する米国特許出願第14/212,431号および2014年3月14日に出願された「SYSTEM AND METHOD FOR USING VOLTAGE BUS LEVELS TO SIGNAL SYSTEM CONDITIONS」と称する米国特許出願第14/212,491号の利益を主張し、米国特許出願第14/212,431号および米国特許出願第14/212,491号の各々は、米国特許法第119条(e)の下で、2013年3月15日に出願された「ACTIVE SUSPENSION」と称する米国仮特許出願第61/789,600号および2013年4月23日に出願された「ACTIVE SUSPENSION」と称する米国仮特許出願第61/815,251号への優先権を主張し、前述の出願の各々は、全体として参照により本明細書に組み込まれる。
1.発明の分野
本明細書で説明される技法は、概して、車両電気システムに関し、具体的には、複数の電気バスを有する車両電気システムに関する。高電力電気バスを介して、例えば、アクティブサスペンションシステムなどの1つまたは複数の高電力負荷を供給するための技法が説明される。
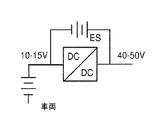
標準の車両バッテリに接続された低電力(14V)バスと、高電力(42Vまたは48V)バスとを有する二重電圧の自動車電気システムが提案されている。
いくつかの実施形態は、車両用の電気システムに関する。電気システムは、第1の電気バスにおける車両バッテリ電圧を第2の電気バスにおける第2の電圧に変換するように構成された電力コンバータを含む。第2の電圧は、車両バッテリ電圧と少なくとも同じ高さの電位である。また、電気システムは、第2の電気バスと結合されたエネルギー貯蔵装置も含む。少なくとも1つの負荷は、第2の電気バスと結合される。電力コンバータは、第1の電気バスから少なくとも1つの負荷に電力を提供し、第1の電気バスから引き出される電力を最大電力以下に制限するように構成される。少なくとも1つの負荷が最大電力よりも多くの電力を引き出す際は、少なくとも1つの負荷は、エネルギー貯蔵装置から少なくとも部分的に電力を引き出す。
図面では、様々な図に示される同一のまたはほぼ同一の各コンポーネントは、同様の参照文字によって表される。明確にするため、全ての図面において全てのコンポーネントがラベル付けされるわけではない。図面は、必ずしも原寸に比例するとは限らず、代わりに、本明細書で説明される技法の様々な態様を示すことに重点を置く。
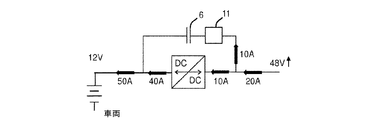
いくつかの実施形態では、車両電気システムは、車両バッテリに接続された電気バスとは無関係に制御される高電力電気バスを含み得る。高電力電気バスは、車両バッテリから電力を引き出す電力コンバータ(例えば、DC/DCコンバータ)によって少なくとも部分的に供給されることができ、電力コンバータは、車両バッテリから高電力電気バスを少なくとも部分的に減結合する(decouple)ことができる。高電力電気負荷(例えば、アクティブサスペンションシステムなど)は、高電力電気バスによって給電することができる。
エネルギー=1/2*C*(50)2−1/2*C*(38)2=528*C
いくつかの実施形態では、本明細書で説明される技法は、1つまたは複数のコンピューティングデバイスを使用して行うことができる。実施形態は、特定のタイプのコンピューティングデバイスでの動作に限定されない。
Claims (21)
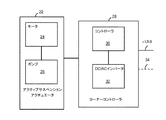
- 車両の電気システムのためのエネルギー予測管理システムであって、
第1のアクティブサスペンションシステムと、
第1のエネルギー貯蔵装置と、
前記第1のアクティブサスペンションシステムおよび前記第1のエネルギー貯蔵装置に電気的に接続された第1の電気バスであって、前記第1のエネルギー貯蔵装置が、充電の状態を有し、前記第1のアクティブサスペンションシステムに電力を提供するように構成され、前記第1のエネルギー貯蔵装置によって提供される前記電力が、前記第1の電気バスによって前記第1のアクティブサスペンションシステムに供給される、第1の電気バスと、
前記第1の電気バスに電気的に接続される電力コンバータであって、前記電力コンバータは前記第1の電気バスによって前記第1のエネルギー貯蔵装置と前記第1のアクティブサスペンションシステムのうちの少なくとも1つに電力を提供するように構成される、電力コンバータと、
少なくとも1つのコントローラであって、
予想される将来の走行表面の特徴に関する情報を取得し、
前記将来の前記特徴の上を走行するために、前記車両の前記第1のアクティブサスペンションシステムによって必要なエネルギーの量を決定し、
前記必要なエネルギー量に少なくとも部分的に基づいて、前記第1のエネルギー貯蔵装置の前記充電の状態を調整するように構成される、コントローラと、
を含む、車両の電気システムのためのエネルギー予測管理システム。 - 前記少なくとも1つのコントローラが、前記予想される将来の走行表面の前記特徴に関する情報を、
前方監視センサ、
車両ナビゲーションシステム、および
第2のアクティブサスペンションシステム、
の少なくとも1つから取得する、
請求項1に記載のエネルギー予測管理システム。 - 前記第1のアクティブサスペンションシステムが後輪と機械的に結合され、前記第2のアクティブサスペンションシステムが前輪と機械的に結合される、請求項2に記載のエネルギー予測管理システム。
- 車両運動を少なくとも部分的に制御する第2のシステムをさらに含む、請求項1〜3のいずれか一項に記載のエネルギー予測管理システム。
- 前記第2のシステムが、電気式パワーステアリングシステム、アンチロックブレーキシステム、電気式アンチロール安定性システムおよび電子安定性制御システムの少なくとも1つを含む、請求項4に記載のエネルギー予測管理システム。
- 第2の電気バスをさらに含み、前記第1のエネルギー貯蔵装置の端子が前記第2の電気バスと同じ電気ノードのところにある、請求項1〜5のいずれか一項に記載のエネルギー予測管理システム。
- 第2のエネルギー貯蔵装置および第2の電気バスをさらに含み、前記第2のエネルギー貯蔵装置が前記電力コンバータを介して前記第2の電気バスと電気的に結合される、請求項1〜5のいずれか一項に記載のエネルギー予測管理システム。
- 前記電力コンバータから提供される前記電力が、所定の最大電力以下であり、少なくとも1つの動作状態において、前記第1のアクティブサスペンションシステムが前記最大電力よりも多くの電力を引き出す際は、前記第1のアクティブサスペンションシステムは前記電力コンバータおよび前記第2のエネルギー貯蔵装置から電力を引き出す、請求項7に記載のエネルギー予測管理システム。
- 前記電力コンバータが、DC/DCコンバータを含む、請求項1〜8のいずれか一項に記載のエネルギー予測管理システム。
- 1つの動作状態では、前記第1のアクティブサスペンションシステムは前記所定の最大電力よりも少ない電力を引き出し、前記第1のアクティブサスペンションシステムにより引き出された前記電力が、前記電力コンバータおよび前記第1のエネルギー貯蔵装置の両方により提供される、請求項8に記載のエネルギー予測管理システム。
- 前記電力コンバータに電力を伝達する第2の電気バスをさらに備える、請求項1〜5のいずれか一項に記載のエネルギー予測管理システム。
- 前記電力コンバータが、前記第2の電気バスから電力を受け取り、前記第1の電気バスに結合された前記第1のアクティブサスペンションシステムによって受け取られる前記電力の少なくとも一部を提供し、一定の時間間隔内に前記第2の電気バスから引き出されたエネルギーの量に基づいて、前記第2の電気バスから引き出される電力を第2の所定の最大電力以下に制限する、請求項11に記載のエネルギー予測管理システム。
- 前記電力コンバータが、前記第2の電気バスから引き出される電流を最大電流以下に制限することによって、前記第2の電気バスから引き出される前記電力を制限する、請求項11または12に記載のエネルギー予測管理システム。
- 前記電力コンバータにより提供される前記最大電力は、通信ネットワークを介して前記電力コンバータに結合されるコントローラによって制御される、請求項8、10、または12に記載のエネルギー予測管理システム。
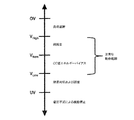
- 前記電力コンバータは、前記第1の電気バスと、前記第1の電気バスに結合される前記第1のエネルギー貯蔵装置および前記第1のアクティブサスペンションシステムのうちの少なくとも1つとの間で交換された電力に応じて、前記第1のバスの電圧が変動するようにし、前記電圧が第1の閾値と第2の閾値との間で変動する、請求項1〜14のいずれか一項に記載のエネルギー予測管理システム。
- 車両の電気システムのエネルギー予測管理方法であって、
第1の電気バスを用いて、電力コンバータから、エネルギー貯蔵装置およびアクティブサスペンションシステムのうちの少なくとも1つに電力を提供することと、
予想される将来の走行表面の特徴に関する情報を得ることと、
前記特徴の上を走行するために、前記車両の前記アクティブサスペンションシステムによって必要なエネルギーの量を決定することと、
前記車両の車輪が前記特徴に遭遇する前に、前記必要なエネルギー量に基づいて、前記エネルギー貯蔵装置の充電の状態を調整することと、
を含む、エネルギー予測管理方法。 - 前記電力コンバータに電力を伝達するために第2の電気バスを使用することをさらに含む、請求項16に記載の方法。
- 前記電力コンバータによって前記第1の電気バスに提供された前記電力を最大電力に制限すること、をさらに含む、請求項16または17に記載の方法。
- 前記アクティブサスペンションシステムが、前記エネルギー貯蔵装置から電力を引き出すとともに前記電力コンバータから電力を受け取る、請求項18に記載の方法。
- 前記電力コンバータが、DC/DCコンバータを含む、請求項16〜19のいずれか一項に記載の方法。
- 一定の時間間隔内に前記第2の電気バスから引き出されたエネルギーの量に基づいて、前記第2の電気バスから引き出される電力を所定の最大電力以下に制限することをさらに含む、請求項17に記載の方法。
Applications Claiming Priority (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361789600P | 2013-03-15 | 2013-03-15 | |
| US61/789,600 | 2013-03-15 | ||
| US201361815251P | 2013-04-23 | 2013-04-23 | |
| US61/815,251 | 2013-04-23 | ||
| US14/212,491 US20140265560A1 (en) | 2013-03-15 | 2014-03-14 | System and method for using voltage bus levels to signal system conditions |
| US14/212,431 US20140265559A1 (en) | 2013-03-15 | 2014-03-14 | Vehicular high power electrical system |
| US14/212,491 | 2014-03-14 | ||
| US14/212,431 | 2014-03-14 | ||
| PCT/US2014/029942 WO2014145220A2 (en) | 2013-03-15 | 2014-03-15 | Vehicular high power electrical system and system and method for using voltage bus levels to signal system conditions |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019019978A Division JP2019083687A (ja) | 2013-03-15 | 2019-02-06 | 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016516389A JP2016516389A (ja) | 2016-06-02 |
| JP2016516389A5 JP2016516389A5 (ja) | 2017-04-20 |
| JP6479760B2 true JP6479760B2 (ja) | 2019-03-06 |
Family
ID=51524379
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016503287A Active JP6479760B2 (ja) | 2013-03-15 | 2014-03-15 | 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 |
| JP2019019978A Pending JP2019083687A (ja) | 2013-03-15 | 2019-02-06 | 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 |
| JP2022076332A Pending JP2022105552A (ja) | 2013-03-15 | 2022-05-02 | 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019019978A Pending JP2019083687A (ja) | 2013-03-15 | 2019-02-06 | 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 |
| JP2022076332A Pending JP2022105552A (ja) | 2013-03-15 | 2022-05-02 | 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US20140265559A1 (ja) |
| JP (3) | JP6479760B2 (ja) |
| CN (2) | CN110014836B (ja) |
| WO (1) | WO2014145220A2 (ja) |
Families Citing this family (69)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104053579B (zh) * | 2012-01-06 | 2015-09-02 | 三菱电机株式会社 | 电源系统装置 |
| US9039568B2 (en) | 2012-05-04 | 2015-05-26 | Ford Global Technologies, Llc | Methods and systems for extending regenerative braking |
| CN103972887B (zh) * | 2014-05-19 | 2017-07-18 | 南京南瑞继保电气有限公司 | 一种适用于双回线路的统一潮流控制器 |
| US9682671B2 (en) * | 2014-06-10 | 2017-06-20 | Ford Global Technologies, Llc | Vehicle system with battery boost and bypass control |
| US9472967B2 (en) * | 2014-07-31 | 2016-10-18 | Motorola Solutions, Inc. | Power management system and method for a portable device |
| JP6191575B2 (ja) * | 2014-08-06 | 2017-09-06 | トヨタ自動車株式会社 | 電源装置 |
| US9487103B2 (en) * | 2014-08-26 | 2016-11-08 | GM Global Technology Operations LLC | Auxiliary battery management system and method |
| CN104393630A (zh) * | 2014-10-16 | 2015-03-04 | 江苏金诺电器有限公司 | 一种电动汽车超级电容充放电装置及其控制方法 |
| CN104590045B (zh) * | 2015-02-26 | 2016-08-31 | 德阳东深新能源科技有限公司 | 一种纯电动车并行充电供电系统 |
| DE102015208254A1 (de) * | 2015-05-05 | 2016-11-10 | Robert Bosch Gmbh | Akkuinduktivladevorrichtung |
| EP3113315A1 (en) * | 2015-07-02 | 2017-01-04 | Hella KGaA Hueck & Co | Automotive dual voltage battery charging system |
| US9819224B2 (en) | 2015-07-30 | 2017-11-14 | Hamilton Sundstrand Corporation | Dual-source multi-mode vehicle power supply |
| US10272788B2 (en) * | 2015-08-28 | 2019-04-30 | General Electric Company | Hybrid system with multiple energy storage devices |
| CN106712228A (zh) * | 2015-11-17 | 2017-05-24 | 上海控源电子科技有限公司 | 一种电动汽车充电桩控制系统 |
| GB2548631B (en) * | 2016-03-25 | 2020-01-15 | Jaguar Land Rover Ltd | Electrical load management method and apparatus |
| US10391957B2 (en) * | 2016-04-05 | 2019-08-27 | Ford Global Technologies, Llc | Integrated power distribution system for a vehicle |
| CN107640039A (zh) * | 2016-07-22 | 2018-01-30 | 飞宏科技股份有限公司 | 一种自动切换供电电压的车辆控制单元供电系统及其方法 |
| EP3276768B1 (de) | 2016-07-29 | 2019-04-24 | Ford Global Technologies, LLC | Elektrisches bordnetzsystem für kraftfahrzeuge mit einem konverter und einem hochlastverbraucher |
| US10093187B2 (en) * | 2016-08-01 | 2018-10-09 | Ford Global Technologies, Llc | Redundant power supply |
| DE102016215834A1 (de) * | 2016-08-23 | 2018-03-01 | Continental Teves Ag & Co. Ohg | Verfahren zum Betreiben einer Druckregelvorrichtung sowie Druckregelvorrichtung zur Durchführung des Verfahrens |
| IT201600112547A1 (it) * | 2016-11-08 | 2018-05-08 | Magneti Marelli Spa | "Apparato di gestione dell’energia fornita a un sistema di bassa tensione di un autoveicolo comprendente uno stadio di recupero dell’energia e relativo procedimento" |
| IT201600112523A1 (it) * | 2016-11-08 | 2018-05-08 | Magneti Marelli Spa | "Apparato di gestione dell'energia fornita a un sistema di bassa tensione di un autoveicolo comprendente uno stadio di recupero dell'energia e relativo procedimento" |
| KR20180058059A (ko) * | 2016-11-23 | 2018-05-31 | 주식회사 만도 | 차량용 전장 시스템의 소비 전류 제어 장치 및 그 방법 |
| CN106696721B (zh) * | 2016-12-16 | 2023-07-04 | 四川新筑通工汽车有限公司 | 纯电动汽车双源能量系统及供电控制方法、快充方法和慢充方法 |
| JP6838979B2 (ja) * | 2017-01-31 | 2021-03-03 | 川崎重工業株式会社 | 移動体の配電システム |
| GB2559819B (en) * | 2017-02-15 | 2019-07-24 | Mahindra Electric Mobility Ltd | Methods and systems for energy management in vehicles |
| DE102017105472A1 (de) * | 2017-03-15 | 2018-09-20 | Sma Railway Technology Gmbh | Verfahren zur Regelung einer Frequenz einer Ausgangsspannung einer Leistungsversorgungseinrichtung sowie Vorrichtung hierfür |
| FR3066655B1 (fr) * | 2017-05-19 | 2019-07-19 | Valeo Siemens Eautomotive France Sas | Systeme de chargeur electrique pour vehicule electrique ou hybride |
| CN107415738B (zh) * | 2017-07-31 | 2020-05-12 | 北京新能源汽车股份有限公司 | 一种整车工况控制方法、系统及汽车 |
| US11233419B2 (en) * | 2017-08-10 | 2022-01-25 | Zoox, Inc. | Smart battery circuit |
| CN107719155B (zh) * | 2017-09-11 | 2019-09-17 | 吉利汽车研究院(宁波)有限公司 | 电池管理系统及方法 |
| CN108622187B (zh) * | 2018-05-09 | 2019-10-01 | 江苏大学 | 复合电源eps的能量动态控制系统及方法 |
| FR3083187B1 (fr) * | 2018-06-28 | 2020-08-21 | Valeo Equip Electr Moteur | Systeme electrique notamment pour vehicule automobile |
| DE102018212767A1 (de) * | 2018-07-31 | 2020-02-06 | Zf Friedrichshafen Ag | Kraftfahrzeugbordnetz mit einer Isolationsüberwachung zur Versorgung einer Umfeldsensorik |
| US11015566B2 (en) | 2018-08-31 | 2021-05-25 | N4 Innovations, Llc | System for controlling power supplied to a starter motor |
| EP3623226A1 (en) | 2018-09-17 | 2020-03-18 | KNORR-BREMSE Systeme für Nutzfahrzeuge GmbH | A supplementary power supply and a method for providing supplemental power |
| EP3626490A1 (en) | 2018-09-19 | 2020-03-25 | Thermo King Corporation | Methods and systems for power and load management of a transport climate control system |
| EP3626489A1 (en) | 2018-09-19 | 2020-03-25 | Thermo King Corporation | Methods and systems for energy management of a transport climate control system |
| US11273684B2 (en) | 2018-09-29 | 2022-03-15 | Thermo King Corporation | Methods and systems for autonomous climate control optimization of a transport vehicle |
| US11034213B2 (en) | 2018-09-29 | 2021-06-15 | Thermo King Corporation | Methods and systems for monitoring and displaying energy use and energy cost of a transport vehicle climate control system or a fleet of transport vehicle climate control systems |
| US11059352B2 (en) | 2018-10-31 | 2021-07-13 | Thermo King Corporation | Methods and systems for augmenting a vehicle powered transport climate control system |
| US10926610B2 (en) | 2018-10-31 | 2021-02-23 | Thermo King Corporation | Methods and systems for controlling a mild hybrid system that powers a transport climate control system |
| US10875497B2 (en) | 2018-10-31 | 2020-12-29 | Thermo King Corporation | Drive off protection system and method for preventing drive off |
| US11022451B2 (en) | 2018-11-01 | 2021-06-01 | Thermo King Corporation | Methods and systems for generation and utilization of supplemental stored energy for use in transport climate control |
| US11101671B2 (en) * | 2018-12-28 | 2021-08-24 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Electrical vehicle system to discharge capacitors |
| US11554638B2 (en) | 2018-12-28 | 2023-01-17 | Thermo King Llc | Methods and systems for preserving autonomous operation of a transport climate control system |
| WO2020136908A1 (ja) * | 2018-12-28 | 2020-07-02 | 株式会社東芝 | 蓄電池装置 |
| US11072321B2 (en) | 2018-12-31 | 2021-07-27 | Thermo King Corporation | Systems and methods for smart load shedding of a transport vehicle while in transit |
| JP7177985B2 (ja) * | 2019-02-05 | 2022-11-25 | マツダ株式会社 | 車両電源システム |
| JP7190946B2 (ja) * | 2019-03-20 | 2022-12-16 | 三菱重工エンジニアリング株式会社 | 電源装置、自動操舵車両、及び電力供給方法 |
| EP3772427A1 (en) * | 2019-08-06 | 2021-02-10 | Vitesco Technologies Germany GmbH | Electronic control unit for a vehicle with galvanically isolated supply voltages on a single printed circuit board |
| US11376922B2 (en) | 2019-09-09 | 2022-07-05 | Thermo King Corporation | Transport climate control system with a self-configuring matrix power converter |
| US11135894B2 (en) | 2019-09-09 | 2021-10-05 | Thermo King Corporation | System and method for managing power and efficiently sourcing a variable voltage for a transport climate control system |
| US10985511B2 (en) | 2019-09-09 | 2021-04-20 | Thermo King Corporation | Optimized power cord for transferring power to a transport climate control system |
| US11203262B2 (en) | 2019-09-09 | 2021-12-21 | Thermo King Corporation | Transport climate control system with an accessory power distribution unit for managing transport climate control loads |
| EP3790157A1 (en) | 2019-09-09 | 2021-03-10 | Thermo King Corporation | Optimized power distribution to transport climate control systems amongst one or more electric supply equipment stations |
| US11214118B2 (en) | 2019-09-09 | 2022-01-04 | Thermo King Corporation | Demand-side power distribution management for a plurality of transport climate control systems |
| EP3789221A1 (en) | 2019-09-09 | 2021-03-10 | Thermo King Corporation | Prioritized power delivery for facilitating transport climate control |
| US11458802B2 (en) | 2019-09-09 | 2022-10-04 | Thermo King Corporation | Optimized power management for a transport climate control energy source |
| US11420495B2 (en) | 2019-09-09 | 2022-08-23 | Thermo King Corporation | Interface system for connecting a vehicle and a transport climate control system |
| US11387732B2 (en) * | 2019-09-12 | 2022-07-12 | Cirrus Logic, Inc. | Efficient use of energy in a switching power converter |
| WO2021117216A1 (ja) * | 2019-12-13 | 2021-06-17 | ヤマハ発動機株式会社 | ストラドルドビークル |
| US11489431B2 (en) | 2019-12-30 | 2022-11-01 | Thermo King Corporation | Transport climate control system power architecture |
| WO2021184015A1 (en) * | 2020-03-13 | 2021-09-16 | Rustee Stubbs | Electrically driven dump system |
| WO2022026182A1 (en) * | 2020-07-29 | 2022-02-03 | Cirrus Logic International Semiconductor Ltd. | Maintaining operation of a power converter within a stable region of a power curve or that power converter |
| KR20230076852A (ko) * | 2020-12-10 | 2023-05-31 | 애플 인크. | 배터리 시스템 |
| JP7288922B2 (ja) * | 2021-03-25 | 2023-06-08 | 本田技研工業株式会社 | 電動サスペンション装置 |
| WO2023066442A1 (en) * | 2021-10-18 | 2023-04-27 | Jaguar Land Rover Limited | Controller module for highly dynamic loads |
| CN114243751A (zh) * | 2021-11-09 | 2022-03-25 | 长春吉电能源科技有限公司 | 一种电力电子化光储融合并网系统 |
Family Cites Families (64)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS611522A (ja) * | 1984-06-14 | 1986-01-07 | Nissan Motor Co Ltd | 車両におけるサスペンシヨン制御装置 |
| JPH07115572B2 (ja) * | 1985-01-16 | 1995-12-13 | トヨタ自動車株式会社 | 後輪のサスペンション制御装置 |
| USRE33626E (en) * | 1985-01-16 | 1991-07-02 | Toyota Jidosha Kabushiki Kaisha | Rear suspension controller |
| US4726604A (en) * | 1985-01-28 | 1988-02-23 | Toyota Jidosha Kabushiki Kaisha | Rear suspension controller |
| JPS6280112A (ja) * | 1985-10-02 | 1987-04-13 | Toyota Motor Corp | サスペンシヨン制御装置 |
| US5091679A (en) * | 1990-06-20 | 1992-02-25 | General Motors Corporation | Active vehicle suspension with brushless dynamoelectric actuator |
| US5497325A (en) * | 1992-08-31 | 1996-03-05 | Fuji Jukogyo Kabushiki Kaisha | Suspension control system for a vehicle |
| DE4327483A1 (de) * | 1993-08-16 | 1995-02-23 | Bosch Gmbh Robert | Verfahren und Vorrichtung zur Ansteuerung eines Leistungsstellelements einer Antriebseinheit eines Fahrzeugs |
| JP3336777B2 (ja) * | 1994-10-25 | 2002-10-21 | 株式会社エクォス・リサーチ | ハイブリッド車両及びハイブリッド車両の制御方法 |
| KR19980031242A (ko) * | 1996-10-31 | 1998-07-25 | 오상수 | 자동차의 서스펜션용 유압부시 제어시스템 |
| JP2000287302A (ja) * | 1999-03-31 | 2000-10-13 | Toshiba Battery Co Ltd | 車両用エネルギ管理装置および車両 |
| WO2000076812A1 (es) * | 1999-06-09 | 2000-12-21 | Lear Automotive (Eeds) Spain, S.L. | Caja de distrubucion electrica para vehiculos con dos redes a niveles de tensión distintos |
| WO2000077916A1 (es) * | 1999-06-09 | 2000-12-21 | Lear Automotive (Eeds) Spain, S.L. | Sistema de distribucion electrica de tension dual |
| US6154381A (en) * | 1999-06-30 | 2000-11-28 | General Motors Corporation | High efficiency power system with plural parallel DC/DC converters |
| US6700214B2 (en) * | 2000-02-14 | 2004-03-02 | Aura Systems, Inc. | Mobile power generation system |
| JP2002200948A (ja) * | 2000-12-28 | 2002-07-16 | Denso Corp | 車両用配電装置 |
| US6487477B1 (en) * | 2001-05-09 | 2002-11-26 | Ford Global Technologies, Inc. | Strategy to use an on-board navigation system for electric and hybrid electric vehicle energy management |
| US6534950B2 (en) * | 2001-05-25 | 2003-03-18 | Cellex Power Products, Inc. | Hybrid power supply control system and method |
| DE10160480A1 (de) * | 2001-12-08 | 2003-06-26 | Bosch Gmbh Robert | Verfahren und Einrichtung zur koordinierten Steuerung mechanischer, elektrischer und thermischer Leistungsflüsse in einem Kraftfahrzeug |
| JP3874344B2 (ja) * | 2002-01-17 | 2007-01-31 | 株式会社小松製作所 | ハイブリッド電源システム |
| US6792341B2 (en) * | 2002-10-23 | 2004-09-14 | Ford Motor Company | Method and system for controlling power distribution in a hybrid fuel cell vehicle |
| US7614381B2 (en) * | 2003-03-28 | 2009-11-10 | Caterpillar Inc. | Power system with an integrated lubrication circuit |
| US6920951B2 (en) * | 2003-04-17 | 2005-07-26 | Visteon Global Technologies, Inc. | Regenerative damping method and apparatus |
| US7199551B2 (en) * | 2003-09-26 | 2007-04-03 | Ford Global Technologies, Llc | Method and system for controllably transferring energy from a high voltage bus to a low voltage bus in a hybrid electric vehicle |
| DE10353025A1 (de) * | 2003-11-13 | 2005-06-16 | Daimlerchrysler Ag | Federungssystem für ein Kraftfahrzeug |
| US7333882B2 (en) * | 2004-02-12 | 2008-02-19 | Hitachi, Ltd. | Suspension control apparatus |
| US20050201030A1 (en) * | 2004-03-15 | 2005-09-15 | Tyco Electronics Corporation | Protection circuit for dual voltage electrical distribution system |
| US7407137B2 (en) * | 2005-05-06 | 2008-08-05 | Honeywell International Inc. | Dual voltage integrated power and attitude control system and method |
| US7751959B2 (en) * | 2005-06-21 | 2010-07-06 | Tenneco Automotive Operating Company Inc. | Semi-active suspension system with anti-roll for a vehicle |
| JP4852919B2 (ja) * | 2005-07-25 | 2012-01-11 | アイシン・エィ・ダブリュ株式会社 | 車両乗上制御システム及び車両乗上制御方法 |
| JP2007253904A (ja) * | 2006-03-27 | 2007-10-04 | Fujitsu Ten Ltd | 車両制御装置及び車両制御方法 |
| EP1870269B1 (en) * | 2006-06-23 | 2008-09-17 | Fondazione Torino Wireless | A suspension tilting module for a wheeled vehicle and a wheeled vehicle equipped with said suspension tilting module |
| JP4784566B2 (ja) * | 2006-07-12 | 2011-10-05 | 日産自動車株式会社 | 二次電池の入出力電力制御装置及び入出力電力制御方法 |
| EP1878598A1 (en) * | 2006-07-13 | 2008-01-16 | Fondazione Torino Wireless | Regenerative suspension for a vehicle |
| US7612524B2 (en) * | 2006-09-29 | 2009-11-03 | International Truck Intellectual Property Company, Llc | Motor vehicle battery disconnect circuit having electronic disconnects |
| JP2008199860A (ja) * | 2007-02-15 | 2008-08-28 | Auto Network Gijutsu Kenkyusho:Kk | 目標充電量算出方法、目標充電量算出装置及び充電量制御装置 |
| US7920942B2 (en) * | 2007-03-01 | 2011-04-05 | Wisconsin Alumni Research Foundation | Control of combined storage and generation in distributed energy resources |
| JP2008289303A (ja) * | 2007-05-18 | 2008-11-27 | Toyota Motor Corp | 電力制御装置 |
| US7911079B2 (en) * | 2007-07-31 | 2011-03-22 | Caterpillar Inc | Electrical system architecture having high voltage bus |
| JP5194746B2 (ja) * | 2007-11-30 | 2013-05-08 | トヨタ自動車株式会社 | 車両の制御装置 |
| JP4288333B1 (ja) * | 2007-12-18 | 2009-07-01 | トヨタ自動車株式会社 | 車両の電源装置 |
| JP2010076532A (ja) * | 2008-09-25 | 2010-04-08 | Toyota Motor Corp | 車両用電源システム |
| JP2010247652A (ja) * | 2009-04-15 | 2010-11-04 | Toyota Motor Corp | 車両用電源システム |
| JP5333005B2 (ja) * | 2009-07-24 | 2013-11-06 | 株式会社豊田自動織機 | 車両用電源装置 |
| US8245801B2 (en) * | 2009-11-05 | 2012-08-21 | Bluways Usa, Inc. | Expandable energy storage control system architecture |
| US8374740B2 (en) * | 2010-04-23 | 2013-02-12 | GM Global Technology Operations LLC | Self-learning satellite navigation assisted hybrid vehicle controls system |
| JP5429197B2 (ja) * | 2011-01-11 | 2014-02-26 | トヨタ自動車株式会社 | 車両制御装置 |
| JP2012157209A (ja) * | 2011-01-28 | 2012-08-16 | Mitsubishi Electric Corp | 電源制御装置 |
| CN102858582B (zh) * | 2011-04-13 | 2015-05-06 | 丰田自动车株式会社 | 电动车辆的电源装置及其控制方法 |
| US8448952B2 (en) * | 2011-05-31 | 2013-05-28 | GM Global Technology Operations LLC | Vehicle with active-regenerative suspension |
| WO2013008298A1 (ja) * | 2011-07-11 | 2013-01-17 | トヨタ自動車株式会社 | ブレーキシステム、アクチュエータ制御装置 |
| US20130024055A1 (en) * | 2011-07-18 | 2013-01-24 | GM Global Technology Operations LLC | Adaptive energy management in a hybrid vehicle |
| US8878547B2 (en) * | 2011-10-31 | 2014-11-04 | Lear Corporation | Insulation resistance monitoring for vehicles with high-voltage power net |
| US9234943B2 (en) * | 2011-12-16 | 2016-01-12 | Lear Corporation | Method and system for battery current measurement calibration |
| US20130274952A1 (en) * | 2012-04-16 | 2013-10-17 | Feisel Weslati | Predictive powertrain control using driving history |
| US9574582B2 (en) * | 2012-04-23 | 2017-02-21 | Fluid Ride, Ltd. | Hydraulic pump system and method of operation |
| FR2993213B1 (fr) * | 2012-07-12 | 2015-10-23 | Commissariat Energie Atomique | Procede de gestion de l'energie consommee par un vehicule automobile et systeme mettant en œuvre un tel procede |
| JP5532089B2 (ja) * | 2012-08-22 | 2014-06-25 | 日産自動車株式会社 | 電池システムの充電状態バランス回復方法 |
| US9669724B2 (en) * | 2012-08-31 | 2017-06-06 | Johnson Controls Technology Center | Optimized fuzzy logic controller for energy management in micro and mild hybrid electric vehicles |
| CN102897053B (zh) * | 2012-11-01 | 2015-06-24 | 徐万洪 | 供电系统及供电方法 |
| US8788146B1 (en) * | 2013-01-08 | 2014-07-22 | Ford Global Technologies, Llc | Adaptive active suspension system with road preview |
| EP3626485A1 (en) * | 2013-03-15 | 2020-03-25 | ClearMotion, Inc. | Active vehicle suspension improvements |
| EP2969608B1 (en) * | 2013-03-15 | 2021-11-17 | ClearMotion, Inc. | Multi-path fluid diverter valve |
| US9174508B2 (en) * | 2013-03-15 | 2015-11-03 | Levant Power Corporation | Active vehicle suspension |
-
2014
- 2014-03-14 US US14/212,431 patent/US20140265559A1/en not_active Abandoned
- 2014-03-14 US US14/212,491 patent/US20140265560A1/en not_active Abandoned
- 2014-03-15 WO PCT/US2014/029942 patent/WO2014145220A2/en active Application Filing
- 2014-03-15 JP JP2016503287A patent/JP6479760B2/ja active Active
- 2014-03-15 CN CN201811466185.XA patent/CN110014836B/zh active Active
- 2014-03-15 CN CN201480021474.2A patent/CN105377613B/zh active Active
-
2019
- 2019-02-06 JP JP2019019978A patent/JP2019083687A/ja active Pending
-
2022
- 2022-05-02 JP JP2022076332A patent/JP2022105552A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| JP2016516389A (ja) | 2016-06-02 |
| CN110014836B (zh) | 2022-08-23 |
| JP2022105552A (ja) | 2022-07-14 |
| CN110014836A (zh) | 2019-07-16 |
| US20140265559A1 (en) | 2014-09-18 |
| WO2014145220A3 (en) | 2014-12-24 |
| WO2014145220A2 (en) | 2014-09-18 |
| JP2019083687A (ja) | 2019-05-30 |
| CN105377613A (zh) | 2016-03-02 |
| US20140265560A1 (en) | 2014-09-18 |
| CN105377613B (zh) | 2019-01-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6479760B2 (ja) | 車両高電力電気システムならびにシステム状態を信号伝達するために電圧バスレベルを使用するためのシステムおよび方法 | |
| JP7176852B2 (ja) | 車両電源システム | |
| JP5992604B2 (ja) | ハイブリッド電気車両のエネルギー管理システムおよび燃料節約方法 | |
| US9290107B2 (en) | System and method for energy management in an electric vehicle | |
| JP7068893B2 (ja) | 車両電源システム | |
| JP6284921B2 (ja) | 電力供給システム及び輸送機器、並びに、電力伝送方法 | |
| JP6240649B2 (ja) | 電力供給システム | |
| JP7081959B2 (ja) | 車両電源システム | |
| JP2014147197A (ja) | バッテリ制御装置 | |
| JP2007195398A (ja) | 車両推進システム | |
| JP2008211952A (ja) | 電源装置 | |
| WO2015071977A1 (ja) | 充放電システム | |
| JP2011254594A (ja) | 鉄道車両の駆動装置 | |
| JP6749742B2 (ja) | 推進システムおよび車両駆動方法 | |
| JP6310938B2 (ja) | 充放電システム | |
| JP6989431B2 (ja) | 車両電源システム | |
| CN108136928B (zh) | 多储存器系统和用于运行多储存器系统的方法 | |
| JPH11252711A (ja) | 電気自動車用電源装置 | |
| JP2017147829A (ja) | 電力供給システム及び輸送機器、並びに、電力伝送システムの制御方法 | |
| JP7096046B2 (ja) | 車両電源システム | |
| JP7081958B2 (ja) | 車両電源システム | |
| CN103534128A (zh) | 用于管理车辆的电制动的设备和方法 | |
| JP7096203B2 (ja) | 電源システム | |
| CN105564257B (zh) | 用于运行具有电蓄能器的机动车的方法和装置 | |
| JP2007153149A (ja) | 車両用電源制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170315 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170315 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180223 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180521 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180822 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190206 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6479760 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |