JP6206443B2 - ハイブリッド自動車 - Google Patents
ハイブリッド自動車 Download PDFInfo
- Publication number
- JP6206443B2 JP6206443B2 JP2015099886A JP2015099886A JP6206443B2 JP 6206443 B2 JP6206443 B2 JP 6206443B2 JP 2015099886 A JP2015099886 A JP 2015099886A JP 2015099886 A JP2015099886 A JP 2015099886A JP 6206443 B2 JP6206443 B2 JP 6206443B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- carrier
- rotation
- engine
- control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000008859 change Effects 0.000 claims description 45
- 230000007246 mechanism Effects 0.000 claims description 30
- 230000009977 dual effect Effects 0.000 claims description 18
- 230000005611 electricity Effects 0.000 claims description 10
- 239000010687 lubricating oil Substances 0.000 description 71
- 238000005461 lubrication Methods 0.000 description 32
- 238000003860 storage Methods 0.000 description 13
- 238000004891 communication Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 7
- 238000000034 method Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 7
- 230000000994 depressogenic effect Effects 0.000 description 6
- 238000009826 distribution Methods 0.000 description 5
- 230000009467 reduction Effects 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 239000003990 capacitor Substances 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 239000003921 oil Substances 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- 238000002485 combustion reaction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 229910001416 lithium ion Inorganic materials 0.000 description 1
- 239000000314 lubricant Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910000652 nickel hydride Inorganic materials 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/36—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings
- B60K6/365—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the transmission gearings with the gears having orbital motion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/22—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs
- B60K6/38—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by apparatus, components or means specially adapted for HEVs characterised by the driveline clutches
- B60K6/383—One-way clutches or freewheel devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines ; Control systems therefor, i.e. systems controlling two or more prime movers, or controlling one of these prime movers and any of the transmission, drive or drive units Informative references: mechanical gearings with secondary electric drive F16H3/72; arrangements for handling mechanical energy structurally associated with the dynamo-electric machine H02K7/00; machines comprising structurally interrelated motor and generator parts H02K51/00; dynamo-electric machines not otherwise provided for in H02K see H02K99/00 the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/02—Conjoint control of vehicle sub-units of different type or different function including control of driveline clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
- B60W10/115—Stepped gearings with planetary gears
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/10—Controlling the power contribution of each of the prime movers to meet required power demand
- B60W20/15—Control strategies specially adapted for achieving a particular effect
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/30—Control strategies involving selection of transmission gear ratio
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/40—Controlling the engagement or disengagement of prime movers, e.g. for transition between prime movers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/02—Clutches
- B60W2710/021—Clutch engagement state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/1005—Transmission ratio engaged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/184—Preventing damage resulting from overload or excessive wear of the driveline
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/909—Gearing
- Y10S903/91—Orbital, e.g. planetary gears
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/912—Drive line clutch
- Y10S903/913—One way
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/93—Conjoint control of different elements
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Hybrid Electric Vehicles (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Description
エンジンと、
発電可能な第1モータと、
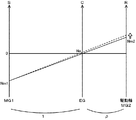
前記第1モータの回転軸と車軸に連結された駆動軸と前記エンジンの出力軸との3軸にこの順にサンギヤとリングギヤとキャリアとが接続された遊星歯車機構と、
前記駆動軸に取り付けられた発電可能な第2モータと、
前記第1モータおよび前記第2モータと電力のやりとりを行なうバッテリと、
前記キャリアの回転を規制する回転規制機構と、
前記キャリアを回転停止状態として前記第1モータと前記第2モータとからの動力により走行するモータ両駆動モードと前記キャリアを回転状態として前記エンジンと前記第1モータと前記第2モータとからの動力により走行するハイブリッド走行モードとを含む複数の走行モードを用いて走行するように前記エンジンと前記第1モータと前記第2モータとを制御する制御手段と、
を備えるハイブリッド自動車であって、
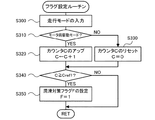
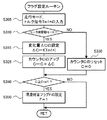
前記制御手段は、前記モータ両駆動モードにより走行しているときに、前記キャリアの回転を停止後、該停止からの経過時間を含む所定条件が成立したときには、前記キャリアが回転するよう制御する所定回転制御を実行する手段である、
ことを要旨とする。
・エンジン22のクランクシャフト26の回転位置を検出するクランクポジションセンサ23からのクランク角θcr
・スロットルバルブのポジションを検出するスロットルバルブポジションセンサからのスロットル開度TH
・スロットルバルブのポジションを調節するスロットルモータへの駆動制御信号
・燃料噴射弁への駆動制御信号
・イグナイタと一体化されたイグニッションコイルへの駆動制御信号
・モータMG1,MG2の回転子の回転位置を検出する回転位置検出センサ43,44からの回転位置θm1,θm2
・モータMG1,MG2の各相に流れる電流を検出する電流センサからの相電流
・バッテリ50の端子間に設置された電圧センサ51aからの電池電圧Vb
・バッテリ50の出力端子に取り付けられた電流センサ51bからの電池電流Ib(バッテリ50から放電するときが正の値)
・バッテリ50に取り付けられた温度センサ51cからの電池温度Tb
・イグニッションスイッチ80からのイグニッション信号
・シフトレバー81の操作位置を検出するシフトポジションセンサ82からのシフトポジションSP
・アクセルペダル83の踏み込み量を検出するアクセルペダルポジションセンサ84からのアクセル開度Acc
・ブレーキペダル85の踏み込み量を検出するブレーキペダルポジションセンサ86からのブレーキペダルポジションBP
・車速センサ88からの車速V
Claims (5)
- エンジンと、
発電可能な第1モータと、
前記第1モータの回転軸と車軸に連結された駆動軸と前記エンジンの出力軸との3軸にこの順にサンギヤとリングギヤとキャリアとが接続された遊星歯車機構と、
前記駆動軸に取り付けられた発電可能な第2モータと、
前記第1モータおよび前記第2モータと電力のやりとりを行なうバッテリと、
前記キャリアの前記エンジンの正回転方向の回転は許容するが逆回転方向の回転は規制するワンウエイクラッチと、
前記キャリアを回転停止状態として前記第1モータと前記第2モータとからの動力により走行するモータ両駆動モードと前記キャリアを回転状態として前記エンジンと前記第1モータと前記第2モータとからの動力により走行するハイブリッド走行モードとを含む複数の走行モードを用いて走行するように前記エンジンと前記第1モータと前記第2モータとを制御する制御手段と、
を備えるハイブリッド自動車であって、
前記制御手段は、前記モータ両駆動モードにより走行しているときに、前記キャリアの回転を停止後、該停止からの経過時間が所定時間が経過した後に、アクセルオンからアクセルオフへ変化した状態またはアクセル操作量が所定量以上変化した状態となる条件が成立したときには、前記キャリアが回転するよう制御する所定回転制御を実行する手段である、
ハイブリッド自動車。 - エンジンと、
発電可能な第1モータと、
前記第1モータの回転軸と車軸に連結された駆動軸と前記エンジンの出力軸との3軸にこの順にサンギヤとリングギヤとキャリアとが接続された遊星歯車機構と、
前記駆動軸に取り付けられた発電可能な第2モータと、
前記第1モータおよび前記第2モータと電力のやりとりを行なうバッテリと、
前記キャリアの前記エンジンの正回転方向の回転は許容するが逆回転方向の回転は規制するワンウエイクラッチと、
前記キャリアを回転停止状態として前記第1モータと前記第2モータとからの動力により走行するモータ両駆動モードと前記キャリアを回転状態として前記エンジンと前記第1モータと前記第2モータとからの動力により走行するハイブリッド走行モードとを含む複数の走行モードを用いて走行するように前記エンジンと前記第1モータと前記第2モータとを制御する制御手段と、
を備えるハイブリッド自動車であって、
前記制御手段は、前記モータ両駆動モードにより走行しているときに、前記キャリアの回転を停止後、該停止からの経過時間を含む所定条件が成立したときには、前記キャリアが回転するよう制御する所定回転制御を実行する手段であり、
前記所定回転制御は、アクセルオンからアクセルオフへの変化状態のときには、前記第1モータの回転数を変更することにより前記キャリアを回転する制御である、
ハイブリッド自動車。 - エンジンと、
発電可能な第1モータと、
前記第1モータの回転軸と車軸に連結された駆動軸と前記エンジンの出力軸との3軸にこの順にサンギヤとリングギヤとキャリアとが接続された遊星歯車機構と、
前記駆動軸に取り付けられた発電可能な第2モータと、
前記第1モータおよび前記第2モータと電力のやりとりを行なうバッテリと、
前記キャリアの前記エンジンの正回転方向の回転は許容するが逆回転方向の回転は規制するワンウエイクラッチと、
前記キャリアを回転停止状態として前記第1モータと前記第2モータとからの動力により走行するモータ両駆動モードと前記キャリアを回転状態として前記エンジンと前記第1モータと前記第2モータとからの動力により走行するハイブリッド走行モードとを含む複数の走行モードを用いて走行するように前記エンジンと前記第1モータと前記第2モータとを制御する制御手段と、
を備えるハイブリッド自動車であって、
前記制御手段は、前記モータ両駆動モードにより走行しているときに、前記キャリアの回転を停止後、該停止からの経過時間を含む所定条件が成立したときには、前記キャリアが回転するよう制御する所定回転制御を実行する手段であり、
前記所定回転制御は、アクセル操作量が所定量以上増加した状態のときには、前記第1モータの回転数を保持した状態で前記第2モータの回転数を変更することにより前記キャリアを回転する制御である、
ハイブリッド自動車。 - エンジンと、
発電可能な第1モータと、
前記第1モータの回転軸と車軸に連結された駆動軸と前記エンジンの出力軸との3軸にこの順にサンギヤとリングギヤとキャリアとが接続された遊星歯車機構と、
前記駆動軸に取り付けられた発電可能な第2モータと、
前記第1モータおよび前記第2モータと電力のやりとりを行なうバッテリと、
前記キャリアの前記エンジンの正回転方向の回転は許容するが逆回転方向の回転は規制するワンウエイクラッチと、
前記キャリアを回転停止状態として前記第1モータと前記第2モータとからの動力により走行するモータ両駆動モードと前記キャリアを回転状態として前記エンジンと前記第1モータと前記第2モータとからの動力により走行するハイブリッド走行モードとを含む複数の走行モードを用いて走行するように前記エンジンと前記第1モータと前記第2モータとを制御する制御手段と、
を備えるハイブリッド自動車であって、
前記制御手段は、前記モータ両駆動モードにより走行しているときに、前記キャリアの回転を停止後、該停止からの経過時間を含む所定条件が成立したときには、前記キャリアが回転するよう制御する所定回転制御を実行する手段であり、
前記所定回転制御は、アクセルオフで降坂路を走行している状態のときには、前記第1モータの回転数を保持した状態で前記第2モータの回転数を変更することにより前記キャリアを回転する制御である、
ハイブリッド自動車。 - 請求項1ないし4のうちのいずれか1つの請求項に記載のハイブリッド自動車であって、
前記所定回転制御は、前記キャリアを180度、120度、90度のいずれかの回転角度だけ回転させる制御である、
ハイブリッド自動車。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015099886A JP6206443B2 (ja) | 2015-05-15 | 2015-05-15 | ハイブリッド自動車 |
| US15/151,603 US20160332614A1 (en) | 2015-05-15 | 2016-05-11 | Hybrid vehicle |
| DE102016108816.1A DE102016108816A1 (de) | 2015-05-15 | 2016-05-12 | Hybridfahrzeug |
| CN201610319380.4A CN106143471A (zh) | 2015-05-15 | 2016-05-13 | 混合动力汽车 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015099886A JP6206443B2 (ja) | 2015-05-15 | 2015-05-15 | ハイブリッド自動車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016215717A JP2016215717A (ja) | 2016-12-22 |
| JP6206443B2 true JP6206443B2 (ja) | 2017-10-04 |
Family
ID=57208563
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015099886A Expired - Fee Related JP6206443B2 (ja) | 2015-05-15 | 2015-05-15 | ハイブリッド自動車 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20160332614A1 (ja) |
| JP (1) | JP6206443B2 (ja) |
| CN (1) | CN106143471A (ja) |
| DE (1) | DE102016108816A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6191585B2 (ja) * | 2014-11-19 | 2017-09-06 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6489100B2 (ja) * | 2016-11-16 | 2019-03-27 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6870549B2 (ja) * | 2017-09-21 | 2021-05-12 | トヨタ自動車株式会社 | 車両用動力伝達装置の制御装置 |
| JP2019189051A (ja) * | 2018-04-25 | 2019-10-31 | トヨタ自動車株式会社 | 車両用駆動装置 |
| DE102018214750B4 (de) * | 2018-08-30 | 2020-12-31 | Magna Pt B.V. & Co. Kg | Verfahren zum Betrieb eines Planetengetriebes sowie Planetengetriebe |
| US20230054823A1 (en) * | 2021-08-20 | 2023-02-23 | Dana Heavy Vehicle Systems Group, Llc | System and method for recirculating power |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR0179051B1 (ko) * | 1993-12-24 | 1999-04-01 | 전성원 | 자동변속기의 변속제어장치 |
| JP3365105B2 (ja) * | 1994-12-26 | 2003-01-08 | 日産自動車株式会社 | 自動変速機の制御装置 |
| JP3579888B2 (ja) * | 2000-11-24 | 2004-10-20 | 本田技研工業株式会社 | 動力伝達装置 |
| EP1258658A3 (en) * | 2001-05-14 | 2009-07-15 | Nissan Motor Company, Limited | Auxiliary Transmission |
| JP3818278B2 (ja) * | 2003-07-22 | 2006-09-06 | トヨタ自動車株式会社 | ハイブリッド車およびその制御方法 |
| US7151987B2 (en) * | 2004-02-17 | 2006-12-19 | Ford Global Technologies, Llc | System for reducing powertrain reaction torque |
| US7141000B2 (en) * | 2004-02-19 | 2006-11-28 | Nissan Motor Co., Ltd. | Engine idle speed control device |
| DE602005000416T2 (de) * | 2004-03-01 | 2007-05-16 | Nissan Motor Co., Ltd., Yokohama | Einrichtung zur Regelung der Leerlaufdrehzahl |
| JP2007001493A (ja) * | 2005-06-27 | 2007-01-11 | Nissan Motor Co Ltd | ハイブリッド車両の制御装置 |
| JP4277884B2 (ja) * | 2006-07-31 | 2009-06-10 | トヨタ自動車株式会社 | 車両の駆動装置 |
| JP4222414B2 (ja) * | 2006-12-04 | 2009-02-12 | トヨタ自動車株式会社 | 動力出力装置、それを備えたハイブリッド自動車、および動力出力装置の制御方法 |
| JP4258556B2 (ja) * | 2007-03-24 | 2009-04-30 | トヨタ自動車株式会社 | ハイブリッド車両用駆動装置の制御装置 |
| JP4263750B2 (ja) * | 2007-03-29 | 2009-05-13 | トヨタ自動車株式会社 | ハイブリッド自動車およびその制御方法 |
| JP4172524B1 (ja) * | 2007-04-24 | 2008-10-29 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP4172523B1 (ja) * | 2007-04-24 | 2008-10-29 | トヨタ自動車株式会社 | 車両およびその制御方法 |
| JP4450017B2 (ja) * | 2007-06-22 | 2010-04-14 | トヨタ自動車株式会社 | 動力出力装置およびそれを備えたハイブリッド自動車 |
| JP5489538B2 (ja) * | 2009-06-03 | 2014-05-14 | キヤノン株式会社 | 力覚センサ |
| JP5081969B2 (ja) * | 2010-12-06 | 2012-11-28 | トヨタ自動車株式会社 | ハイブリッド駆動装置およびハイブリッド駆動装置の制御装置 |
| DE112011104904T5 (de) * | 2011-02-17 | 2013-12-05 | Suzuki Motor Corporation | Antriebssteuergerät eines hybriden Fahrzeugs Fachgebiet |
| JP5622050B2 (ja) * | 2011-04-18 | 2014-11-12 | アイシン・エィ・ダブリュ株式会社 | 車両用駆動装置 |
| JP5737136B2 (ja) * | 2011-10-27 | 2015-06-17 | トヨタ自動車株式会社 | 車両の制御装置 |
| US9475378B2 (en) * | 2012-08-28 | 2016-10-25 | Toyota Jidosha Kabushiki Kaisha | Driving device for hybrid vehicle |
| WO2014080528A1 (ja) * | 2012-11-26 | 2014-05-30 | トヨタ自動車株式会社 | ハイブリッド車両用駆動装置 |
| WO2014091582A1 (ja) * | 2012-12-12 | 2014-06-19 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP2014163404A (ja) * | 2013-02-21 | 2014-09-08 | Toyota Motor Corp | 車両の動力伝達装置 |
| JP5841991B2 (ja) * | 2013-12-24 | 2016-01-13 | 本田技研工業株式会社 | 輸送機関の駆動装置 |
-
2015
- 2015-05-15 JP JP2015099886A patent/JP6206443B2/ja not_active Expired - Fee Related
-
2016
- 2016-05-11 US US15/151,603 patent/US20160332614A1/en not_active Abandoned
- 2016-05-12 DE DE102016108816.1A patent/DE102016108816A1/de not_active Ceased
- 2016-05-13 CN CN201610319380.4A patent/CN106143471A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| DE102016108816A1 (de) | 2016-11-17 |
| JP2016215717A (ja) | 2016-12-22 |
| CN106143471A (zh) | 2016-11-23 |
| US20160332614A1 (en) | 2016-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6206443B2 (ja) | ハイブリッド自動車 | |
| EP3184391B1 (en) | Hybrid vehicle | |
| JP6260558B2 (ja) | ハイブリッド自動車 | |
| CN107031608B (zh) | 混合动力车辆 | |
| JP6332293B2 (ja) | ハイブリッド自動車 | |
| JP2008162491A (ja) | 車両およびその制御方法 | |
| JP6354769B2 (ja) | ハイブリッド車両 | |
| JP6350208B2 (ja) | 自動車 | |
| JP2009018743A (ja) | 車両およびその制御方法 | |
| JP4222332B2 (ja) | ハイブリッド車およびその制御方法 | |
| US20160129911A1 (en) | Motor vehicle | |
| CN106965799B (zh) | 混合动力车辆 | |
| JP4365354B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2009274627A (ja) | ハイブリッド自動車およびその制御方法 | |
| CN107054344B (zh) | 混合动力车辆 | |
| JP2016132367A (ja) | ハイブリッド自動車 | |
| JP5626054B2 (ja) | 自動車 | |
| JP2017128292A (ja) | ハイブリッド自動車 | |
| JP2017094756A (ja) | ハイブリッド自動車 | |
| JP6769147B2 (ja) | ハイブリッド自動車 | |
| JP2017171126A (ja) | ハイブリッド自動車 | |
| JP6693363B2 (ja) | ハイブリッド自動車 | |
| JP2021020631A (ja) | ハイブリッド車両 | |
| JP2009161135A (ja) | ハイブリッド車およびその制御方法 | |
| JP2017144971A (ja) | ハイブリッド自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160923 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170808 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170821 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6206443 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |