JP6090291B2 - 内燃機関の失火判定装置 - Google Patents
内燃機関の失火判定装置 Download PDFInfo
- Publication number
- JP6090291B2 JP6090291B2 JP2014239929A JP2014239929A JP6090291B2 JP 6090291 B2 JP6090291 B2 JP 6090291B2 JP 2014239929 A JP2014239929 A JP 2014239929A JP 2014239929 A JP2014239929 A JP 2014239929A JP 6090291 B2 JP6090291 B2 JP 6090291B2
- Authority
- JP
- Japan
- Prior art keywords
- internal combustion
- combustion engine
- engine
- misfire
- misfire determination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W20/00—Control systems specially adapted for hybrid vehicles
- B60W20/50—Control strategies for responding to system failures, e.g. for fault diagnosis, failsafe operation or limp mode
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K6/00—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines
- B60K6/20—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs
- B60K6/42—Arrangement or mounting of plural diverse prime-movers for mutual or common propulsion, e.g. hybrid propulsion systems comprising electric motors and internal combustion engines the prime-movers consisting of electric motors and internal combustion engines, e.g. HEVs characterised by the architecture of the hybrid electric vehicle
- B60K6/44—Series-parallel type
- B60K6/445—Differential gearing distribution type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0205—Diagnosing or detecting failures; Failure detection models
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02B—INTERNAL-COMBUSTION PISTON ENGINES; COMBUSTION ENGINES IN GENERAL
- F02B77/00—Component parts, details or accessories, not otherwise provided for
- F02B77/08—Safety, indicating, or supervising devices
- F02B77/085—Safety, indicating, or supervising devices with sensors measuring combustion processes, e.g. knocking, pressure, ionization, combustion flame
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M15/00—Testing of engines
- G01M15/04—Testing internal-combustion engines
- G01M15/11—Testing internal-combustion engines by detecting misfire
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M15/00—Testing of engines
- G01M15/04—Testing internal-combustion engines
- G01M15/12—Testing internal-combustion engines by monitoring vibrations
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2400/00—Indexing codes relating to detected, measured or calculated conditions or factors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0638—Engine speed
- B60W2510/0652—Speed change rate
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/06—Combustion engines, Gas turbines
- B60W2510/0685—Engine crank angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/081—Speed
- B60W2510/082—Speed change rate
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/10—Parameters related to the engine output, e.g. engine torque or engine speed
- F02D2200/1012—Engine speed gradient
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/02—Input parameters for engine control the parameters being related to the engine
- F02D2200/10—Parameters related to the engine output, e.g. engine torque or engine speed
- F02D2200/1015—Engines misfires
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S903/00—Hybrid electric vehicles, HEVS
- Y10S903/902—Prime movers comprising electrical and internal combustion motors
- Y10S903/903—Prime movers comprising electrical and internal combustion motors having energy storing means, e.g. battery, capacitor
- Y10S903/904—Component specially adapted for hev
- Y10S903/905—Combustion engine
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Combustion & Propulsion (AREA)
- Chemical & Material Sciences (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Health & Medical Sciences (AREA)
- Human Computer Interaction (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Hybrid Electric Vehicles (AREA)
Description
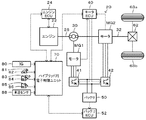
走行用の動力を出力可能な複数気筒の内燃機関と、前記内燃機関の出力軸に機械的に接続された電動機と、を備えるハイブリッド自動車における前記内燃機関の失火判定装置であって、
前記内燃機関の回転変動が第1閾値を超えたときに、前記第1閾値を超えた前記内燃機関の回転変動の演算時から所定クランク角前に演算された前記電動機の回転変動が第2閾値未満のときには、前記内燃機関のいずれかの気筒が失火している可能性があると判定する失火判定手段、
を備えることを要旨とする。
Claims (4)
- 走行用の動力を出力可能な複数気筒の内燃機関と、前記内燃機関の出力軸に機械的に接続された電動機と、を備えるハイブリッド自動車における前記内燃機関の失火判定装置であって、
前記内燃機関の回転変動が第1閾値を超えたときに、前記第1閾値を超えた前記内燃機関の回転変動の演算時から所定クランク角前に演算された前記電動機の回転変動が第2閾値未満のときには、前記内燃機関のいずれかの気筒が失火している可能性があると判定する失火判定手段、
を備える内燃機関の失火判定装置。 - 請求項1記載の内燃機関の失火判定装置であって、
前記所定クランク角は、前記内燃機関の点火の周期のクランク角である、
内燃機関の失火判定装置。 - 請求項1または2記載の内燃機関の失火判定装置であって、
前記失火判定手段は、所定回数に亘って失火している可能性があると判定したときに前記内燃機関の失火を判定する手段である、
内燃機関の失火判定装置。 - 請求項1ないし3のうちのいずれか1つの請求項に記載の内燃機関の失火判定装置であって、
前記回転変動は、所定回転角度だけ回転するのに要した時間の差分として演算される、
内燃機関の失火判定装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014239929A JP6090291B2 (ja) | 2014-11-27 | 2014-11-27 | 内燃機関の失火判定装置 |
| US14/948,979 US9545920B2 (en) | 2014-11-27 | 2015-11-23 | Misfire determination device for internal combustion engine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014239929A JP6090291B2 (ja) | 2014-11-27 | 2014-11-27 | 内燃機関の失火判定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016101777A JP2016101777A (ja) | 2016-06-02 |
| JP6090291B2 true JP6090291B2 (ja) | 2017-03-08 |
Family
ID=56078671
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014239929A Expired - Fee Related JP6090291B2 (ja) | 2014-11-27 | 2014-11-27 | 内燃機関の失火判定装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9545920B2 (ja) |
| JP (1) | JP6090291B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6624325B1 (ja) * | 2019-03-29 | 2019-12-25 | トヨタ自動車株式会社 | 内燃機関の失火検出装置、内燃機関の失火検出システム、データ解析装置、内燃機関の制御装置、内燃機関の失火検出方法、および受信実行装置 |
| JP6624326B1 (ja) | 2019-03-29 | 2019-12-25 | トヨタ自動車株式会社 | 内燃機関の失火検出装置、内燃機関の失火検出システム、データ解析装置、内燃機関の制御装置、内燃機関の失火検出方法、および受信実行装置 |
| JP6624324B1 (ja) * | 2019-03-29 | 2019-12-25 | トヨタ自動車株式会社 | 内燃機関の失火検出装置、内燃機関の失火検出システム、データ解析装置、内燃機関の制御装置、内燃機関の失火検出方法、および受信実行装置 |
| JP7327319B2 (ja) * | 2020-08-07 | 2023-08-16 | トヨタ自動車株式会社 | 内燃機関の失火検出装置 |
| JP7322852B2 (ja) * | 2020-10-09 | 2023-08-08 | トヨタ自動車株式会社 | 内燃機関の失火検出装置 |
| JP7392672B2 (ja) * | 2021-01-29 | 2023-12-06 | トヨタ自動車株式会社 | 内燃機関の失火検出装置 |
| CN115614153B (zh) * | 2021-07-16 | 2025-09-19 | 纬湃汽车电子(长春)有限公司 | 用于hev的发动机失火诊断方法和系统 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2784069B2 (ja) * | 1989-12-28 | 1998-08-06 | 富士重工業株式会社 | エンジンの失火判定装置 |
| JP4118001B2 (ja) | 2000-05-10 | 2008-07-16 | トヨタ自動車株式会社 | 失火検出装置、および失火検出方法 |
| JP4552687B2 (ja) * | 2005-01-11 | 2010-09-29 | トヨタ自動車株式会社 | 内燃機関の失火判定装置および失火判定方法 |
| JP2006233800A (ja) * | 2005-02-23 | 2006-09-07 | Toyota Motor Corp | 内燃機関の失火判定装置および失火判定方法 |
| JP2007170248A (ja) * | 2005-12-21 | 2007-07-05 | Toyota Motor Corp | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 |
| JP4702169B2 (ja) * | 2006-05-09 | 2011-06-15 | トヨタ自動車株式会社 | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 |
| JP4007401B1 (ja) * | 2006-07-31 | 2007-11-14 | トヨタ自動車株式会社 | 内燃機関の失火判定装置および失火判定方法 |
| JP4656169B2 (ja) * | 2008-03-11 | 2011-03-23 | 日産自動車株式会社 | エンジンの失火診断装置及び失火診断方法 |
| JP4858514B2 (ja) * | 2008-08-27 | 2012-01-18 | トヨタ自動車株式会社 | 失火判定装置および失火判定方法 |
| JP5444111B2 (ja) * | 2009-05-13 | 2014-03-19 | トヨタ自動車株式会社 | 車両のバネ上制振制御装置 |
| JP2010264854A (ja) | 2009-05-14 | 2010-11-25 | Toyota Motor Corp | 車両駆動システムの制御装置 |
| JP5256233B2 (ja) * | 2010-03-17 | 2013-08-07 | トヨタ自動車株式会社 | 内燃機関の回転変動異常検出装置 |
| JP5505447B2 (ja) * | 2012-03-28 | 2014-05-28 | トヨタ自動車株式会社 | 内燃機関の制御装置 |
| JP2012215178A (ja) * | 2012-06-26 | 2012-11-08 | Nippon Soken Inc | 内燃機関の失火判定装置 |
-
2014
- 2014-11-27 JP JP2014239929A patent/JP6090291B2/ja not_active Expired - Fee Related
-
2015
- 2015-11-23 US US14/948,979 patent/US9545920B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20160152231A1 (en) | 2016-06-02 |
| JP2016101777A (ja) | 2016-06-02 |
| US9545920B2 (en) | 2017-01-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4345847B2 (ja) | 内燃機関の失火判定装置および失火判定方法並びに車両 | |
| JP6090291B2 (ja) | 内燃機関の失火判定装置 | |
| US10866160B2 (en) | Misfire determination apparatus | |
| JP4702169B2 (ja) | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 | |
| JP4453654B2 (ja) | 内燃機関の失火判定装置およびこれを搭載する車両並びに失火判定方法 | |
| CN112443408A (zh) | 传动系统 | |
| JP6269572B2 (ja) | エンジン装置 | |
| CN107201962B (zh) | 车辆和车辆用的控制方法 | |
| JP2013087624A (ja) | 内燃機関の点火制御装置 | |
| JP2017171075A (ja) | ハイブリッド車両の制御装置 | |
| JP4635991B2 (ja) | 燃焼状態判定装置およびこれを備える車両 | |
| JP4816574B2 (ja) | 内燃機関の出力状態検出装置、車両及び内燃機関の出力状態検出方法 | |
| CN100585151C (zh) | 内燃机的失火判定装置以及失火判定方法 | |
| JP6337799B2 (ja) | ハイブリッド自動車 | |
| JP2013047493A (ja) | エンジンシステム | |
| JP6009978B2 (ja) | ハイブリッド自動車 | |
| JP2007170248A (ja) | 内燃機関装置およびこれを搭載する車両並びに内燃機関の失火判定方法 | |
| JP6304051B2 (ja) | ハイブリッド自動車 | |
| JP2012132325A (ja) | 内燃機関装置およびこれを搭載するハイブリッド車 | |
| JP6365372B2 (ja) | エンジンの失火判定装置 | |
| JP6747364B2 (ja) | 駆動装置 | |
| JP4605124B2 (ja) | 内燃機関の失火判定装置および失火判定方法並びに車両 | |
| JP4697046B2 (ja) | 内燃機関装置および内燃機関の失火判定方法 | |
| JP4952684B2 (ja) | 内燃機関の失火判定装置およびその失火判定方法 | |
| JP6772938B2 (ja) | 駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170123 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6090291 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |