JP6032348B2 - 搬送装置 - Google Patents
搬送装置 Download PDFInfo
- Publication number
- JP6032348B2 JP6032348B2 JP2015502607A JP2015502607A JP6032348B2 JP 6032348 B2 JP6032348 B2 JP 6032348B2 JP 2015502607 A JP2015502607 A JP 2015502607A JP 2015502607 A JP2015502607 A JP 2015502607A JP 6032348 B2 JP6032348 B2 JP 6032348B2
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- transport
- floating
- protrusions
- gas
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000007667 floating Methods 0.000 claims description 38
- 230000009466 transformation Effects 0.000 claims description 2
- 230000032258 transport Effects 0.000 description 37
- 239000007789 gas Substances 0.000 description 35
- 239000000758 substrate Substances 0.000 description 26
- 239000011521 glass Substances 0.000 description 16
- 238000012795 verification Methods 0.000 description 14
- 238000005452 bending Methods 0.000 description 9
- 238000005339 levitation Methods 0.000 description 7
- 238000000034 method Methods 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 230000006837 decompression Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- IJGRMHOSHXDMSA-UHFFFAOYSA-N Atomic nitrogen Chemical compound N#N IJGRMHOSHXDMSA-UHFFFAOYSA-N 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 229910052757 nitrogen Inorganic materials 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000005728 strengthening Methods 0.000 description 1
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/063—Transporting devices for sheet glass
- B65G49/064—Transporting devices for sheet glass in a horizontal position
- B65G49/065—Transporting devices for sheet glass in a horizontal position supported partially or completely on fluid cushions, e.g. a gas cushion
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G51/00—Conveying articles through pipes or tubes by fluid flow or pressure; Conveying articles over a flat surface, e.g. the base of a trough, by jets located in the surface
- B65G51/02—Directly conveying the articles, e.g. slips, sheets, stockings, containers or workpieces, by flowing gases
- B65G51/03—Directly conveying the articles, e.g. slips, sheets, stockings, containers or workpieces, by flowing gases over a flat surface or in troughs
-
- G—PHYSICS
- G02—OPTICS
- G02F—OPTICAL DEVICES OR ARRANGEMENTS FOR THE CONTROL OF LIGHT BY MODIFICATION OF THE OPTICAL PROPERTIES OF THE MEDIA OF THE ELEMENTS INVOLVED THEREIN; NON-LINEAR OPTICS; FREQUENCY-CHANGING OF LIGHT; OPTICAL LOGIC ELEMENTS; OPTICAL ANALOGUE/DIGITAL CONVERTERS
- G02F1/00—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics
- G02F1/01—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour
- G02F1/13—Devices or arrangements for the control of the intensity, colour, phase, polarisation or direction of light arriving from an independent light source, e.g. switching, gating or modulating; Non-linear optics for the control of the intensity, phase, polarisation or colour based on liquid crystals, e.g. single liquid crystal display cells
- G02F1/1303—Apparatus specially adapted to the manufacture of LCDs
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67784—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations using air tracks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2249/00—Aspects relating to conveying systems for the manufacture of fragile sheets
- B65G2249/04—Arrangements of vacuum systems or suction cups
- B65G2249/045—Details of suction cups suction cups
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Nonlinear Science (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Computer Hardware Design (AREA)
- Power Engineering (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Chemical & Material Sciences (AREA)
- Crystallography & Structural Chemistry (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Fluid Mechanics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
本発明は、薄いガラスのごとき基板を浮上させて搬送する搬送装置に関する。
液晶ディスプレイに代表されるフラットパネルディスプレイの製造において、薄いガラスのごとき基板を傷付けずに搬送するために、基板を浮上させて搬送する搬送装置が利用されている。このような搬送装置は、通常、圧縮空気を噴出する浮上装置を備え、さらに、浮上させた基板に接触してこれに駆動力を付与するベルトコンベアあるいはローラコンベアを備える。
ガラス基板に付着した埃やその表面の傷は、ディスプレイの品質に重大な影響を及ぼす。埃の付着や表面の傷の要因の一は、ガラス基板が搬送装置等に接触することである。一方、ガラス基板は例えば厚さ0.7mmあるいはそれ以下であるために可撓性を有するので、搬送中における接触を防止するためには基板を平坦に保ったまま搬送することが重視される。近年さらに薄いガラスが希求されており、これを平坦に保って搬送することは益々難しくなっている。
特許文献1は、ベルトコンベアを備えた搬送装置の技術を開示する。かかる技術によれば、ベルトは等間隔に配置された突起を備えており、突起が浮上したガラス基板に接することにより、これを搬送する。
特許文献2は、ローラコンベアを備えた搬送装置の技術を開示する。特許文献2によれば、「ガラス基板のパスライン中央部が大きく上方に浮き上がったり、垂れ下がったりする湾曲が顕著となることがあった。」ことが、技術的課題と認識されている。これを解決するために、幅方向中央位置のエアテーブルユニットからのエア供給量を調節することによって、ガラス基板の湾曲を抑制している。
上述のごとき技術は、ガラス基板を概して平坦に保持することを可能にしている。しかし、搬送方向に関して先端における撓みのような、局部的な撓みに関しては、なお技術的課題が残されている。すなわち、ガラス基板が一のローラから次のローラへ移動するとき、あるいは、一の搬送装置から次の搬送装置へ移動するとき、先端を支持するものが無いので、先端は自重によって下方に撓んでしまう。先端がローラ、あるいは搬送装置に衝突しやすくなる問題がある。
本発明は上述の問題に鑑みて為されたものである。上述のごとき技術常識に反して、ガラス基板の幅方向の両端のみを平坦に支持し、ガラス基板の中央部をむしろ僅かに撓ませることにより、先端の撓みが抑制されることを本発明者らは見出し、本発明に想到した。
本発明の一局面によれば、対象物を気体により浮上させて第1の方向へ搬送するための搬送装置は、前記気体を噴出して前記対象物に与圧することにより前記対象物を浮上させる浮上部と、前記第1の方向に延びた無端のベルトと、前記ベルトから突出して前記対象物に接触可能な複数の突起と、を備え、前記対象物に接触して前記第1の方向へ駆動するべく構成された搬送部と、前記ベルトと一体であって、前記搬送部と同一直線上に並ぶべく配列され、前記対象物に負圧を与えて前記対象物を前記搬送部に接触せしめる吸引部と、を備える。
基板の先端の撓みを防止でき、基板が搬送装置等に衝突することを防止できる。
添付の図面を参照して以下に本発明の幾つかの例示的な実施形態を説明する。
本発明の実施形態による搬送装置は、例えばクリーンルーム内において、ガラス基板のごとき薄い対象物を搬送することに、好適に利用することができる。ガラス基板の場合、厚さ0.7mm程度のものを対象とするのみならず、厚さ0.1〜0.3mm程度のごく薄いものも対象とすることができる。
図1を参照するに、本発明の一実施形態による搬送装置100は、ワークW(対象物)を浮上させる浮上部116と、ワークWを方向X(第1の方向)へ駆動する搬送部112と、ワークWを搬送部112に接触せしめる吸引部112aと、を備える。搬送部112は、複数の突起114を備える。浮上部116は、気体を噴出する開口116aを備え、噴出した気体がワークWに正圧を付与し、以ってワークWが浮上する。吸引部112aは、逆に、ワークWに負圧を付与し、ワークWを吸引することによって突起114の先端に接触させる。搬送部112はモータ等の手段により矢印Xの方向に移動するので、これに伴ってワークWが方向Xへ搬送される。浮上部116なしに搬送部112のみによりワークWを支持して搬送してもよい。
図2を参照してより詳しく説明する。搬送部112と浮上部116とは、共に支持台118に支持され、支持台118は支持脚118aを介してクリーンルームの床あるいはグレーチングの上に設置される。浮上部116は支持台118上に配列され、例えば方向Xに沿って複数の浮上部116が配列され、さらに方向Xに直交する方向(幅方向)にも複数の浮上部116が配列される。配列の数は自由に選択することができ、それ故、対象物の大きさに応じて装置の構成は任意に変更できる。搬送部112は、通常、複数の浮上部116の幅方向両端に配置されるが、他の配置も可能である。
図3を参照するに、浮上部116は、その全体が箱型であり、その上面は概して平坦である。浮上部116の内部には互いに連通した空洞116bが設けられ、空洞116bは外部の気体供給装置122に連通する。気体供給装置122は、空気や窒素のごとき気体Gを加圧して浮上部116に供給するポンプあるいはコンプレッサである。
一の浮上部116に一の気体供給装置122が連結されていてもよいし、複数の浮上部116に単一の気体供給装置122が連結されていてもよい。また、気体供給装置122は直接に空洞116bと連通していてもよいし、一定量の圧縮気体を貯留するチャンバが間に介在してもよい。
空洞116bに連通して、開口116aが浮上部116の上面を貫通して上方に向かって開口している。開口116aは、例えば図1,2のごとく円形のスリットでもよいし、矩形や複数のスリット、あるいは多数の小孔等、種々の形状をとりうる。また開口116aは、鉛直に上面を貫通していてもよいし、上面に対して傾きを持っていてもよい。あるいは浮上部116の上面の一部または全体が通気性のあるメッシュ体や多孔質体であってもよい。
気体供給装置122により供給された加圧された気体Gは、空洞116bを通って開口116aより噴出する。噴出した気体Gは、ワークWと浮上部116との間に加圧された空間Pを生ぜしめ、以ってワークWに与圧して浮上力を付与する。このとき、噴出した気体GがワークWに突き当たることにより生み出される力のみならず、突き当たった気体Gが周囲に向かって分散してゆく過程で生じる静圧も浮上力の源となる。それ故、比較的に僅かな加圧力により大きな浮上力が得られ、エネルギ効率にも優れる。
図2に戻って参照するに、搬送部112は、概して、2以上のホイール110間を周回する無端のベルトを備えたベルトコンベアである。ホイール110はそれぞれ枠102により支持される。上述のごとく、搬送部112は複数の浮上部116の幅方向両端に配置され、そのベルトが方向Xに沿って延びるように向けられる。
ホイール110にはシャフト110aが結合しており、シャフト110aは枠102の支持孔102aに軸支されることにより、ホイール110はその周りに回転可能である。シャフト110aにはギヤ110bが結合しており、一体に回転する。結合のために、例えば、互いに嵌め合うキーとキー溝との組み合わせを採用してもよいし、嵌め合いに代えて、一体構造であってもよい。
搬送装置100は、さらに電動モータのごとき駆動装置110cを備える。駆動装置110cは、ギヤ110bと噛み合うギヤ110dを備え、以って駆動装置110cの駆動によりホイール110が回転し、搬送部112がホイール110間を周回する。あるいは駆動装置はホイールを直接に駆動してもよいし、あるいは適宜のギヤ、ピニオン装置がさらに介在してもよい。
搬送部112は、ベルトから突出した複数の突起114を備える。複数の突起114は、また方向Xに沿って並ぶべく配列される。突起114はベルトと一体でもよいし、別体であってベルトに係合したものであってもよい。突起114は、後述のごとく、ワークWの浮上高さよりも僅かに高く形成されている。その形状は円筒、直方体、錐体あるいは他の何れの形状でもよい。またその先端は、平坦でもよく、あるいはワークWとの接触面積を減じるべく球形や錐形であってもよい。さらにまた、先端は浮上部116に向かって下る傾斜を有していてもよい。この態様については後述する。
吸引部112aは、搬送部112と同一直線上に並ぶべく配列される。この直線は、必然的に方向Xに平行である。より好ましくは、吸引部112aと突起114とは同一直線上である。ここで同一直線上とは、両者が厳密に単一の直線上に並ぶことを要さず、一定の幅を超えない程度に直線から逸脱していてもよい。例えば、ベルトの幅が50mmとすると、ベルトの中央から20mm程度は許容される幅であろう。
図4を参照するに、吸引部112aは好ましくはベルトと一体であり、ベルト下の空間と連通する貫通孔を備える。吸引部112aは、かかる貫通孔からワークW直下の気体G’を吸引し、以って負圧NPをワークWに及ぼす。気体G’は前述の気体Gと同一でもよいし、他の気体であってもよい。
図4と組み合わせて図5を参照するに、吸引部112aは、突起114より僅かに低く形成され、以って吸引部112aとワークWとの間に適宜の隙間が確保される。気体G’は、かかる隙間を通って吸引される。あるいは、同じ高さでもよい。この場合は吸引部112aは気体G’を吸引すると、ワークWと吸引部112aとが密着する。
吸引部112aの下方に、これと密着して減圧チャンバ120が設けられる。減圧チャンバ120は、ポンプあるいはコンプレッサのごとき気体G’を吸引する手段に接続され、その内部の空間120aが減圧される。吸引部112aの貫通孔112bは、空間120aに連通することによって、気体G’を吸引する。吸引部112aと空間120aは、常時連通していてもよいし、貫通孔112bが特定の位置を通過する時にのみ連通するように構成してもよい。
吸引部112aと突起114とは、好ましくは交互に配列される。吸引部112aと突起114とは、図示のごとく2:1の比で配列されてもよく、あるいは1:1や1:2など他の任意の比を採用することができる。
本実施形態によれば、図6(a)に示すごとく、吸引部112aがワークWに負圧を及ぼし、ワークWの端部を突起114に接触させる。突起114が吸引部112aと同一直線上であるので、ワークWの端部が偏って吸引されることはなく、その平坦性は保たれる。ワークWの端部は、突起114に接した状態で、これとともに進行し、以って搬送される。
図6(b)のごとくローラにより搬送される場合と対比すると、本実施形態の利点はより明らかである。ローラ10aによる搬送においては、ローラ10aはワークWと共に進行するわけではなく、ワークWの先端部Waがローラ10aから前方に張り出すにつれて、先端部Waは自重により下方に垂れてゆく。すると、先端部Waは隣のローラ10aに突き当たる可能性がある。これと異なり、図6(a)より理解されるように、突起114はワークWと共に進行するので、その搬送方向先端が下方に垂れても、突起114に突き当たることがない。また、ワークWの端部は一列に並んだ複数の突起114に支えられ、これと共に動くので、柱に支えられた天井のごとく平坦な形状が保持される。
図7を参照するに、ワークWの幅方向両端が平坦に支持され、一定の高さにされる一方、ワークWの中央付近は自重により下方に僅かに撓みうる。すなわち、ワークWは凹の字の形状になりうる。あるいは、ワークWの中央付近を撓ませる変形手段を設けてもよい。
そのような変形手段の一は、特定の浮上高さHを生ずる気体供給装置である。気体供給装置が供給する加圧気体において、加圧力を適宜に調整することにより、浮上部116上における浮上高さHを、突起114上におけるワークWの高さよりも低くすることができる。あるいは、幅方向に複数並んだ浮上部116のうち、中央拠りの浮上部116のみ浮上力を減じてもよい。さらにあるいは、気体供給装置または浮上部116に、適宜の圧損手段または流量調整手段を設けて、中央付近において浮上力を減じてもよい。かかる変形手段により、図7に示すごとくワークWに凹の字の形状を取らせることができる。あるいは、浮上部116による浮上力を強めることにより、ワークWに凸の字の形状を取らせてもよい。
変形手段の他の一は、突起114が、ワークWを撓ませるべく構成されていることである。ワークWは、浮上部116上において、ワークWの重量と浮上部116による浮上力との関係で決まる固有の浮上高さHを有する。突起114がワークWを撓ませないように支持する高さをL2とすると、突起114がこれよりも高い高さL1を有するように形成されていれば、図7に示すごとくワークWに凹の字の形状を取らせることができる。
変形手段のさらに他の一は、突起114の各先端が搬送部112に向かって下る傾斜を有することである。突起114が傾斜していることで、ワークWの中央付近が下方に撓むことが促される。
上述の実施形態には種々の変更がありうる。以下では特に、搬送部および吸引部について、幾つかの変更した実施形態を説明する。
図8(a)は変更した実施形態の一を示し、搬送部312と吸引部322とが独立して設けられている。吸引部322は搬送部312に隣接して平行に延びており、搬送部312は、これまでに説明した実施形態と同様に、複数の突起314を備えてもよい。吸引部322は、搬送部312に平行に並んだ複数の突起322aを備え、その開口を介して気体を吸引する。好ましくは突起314は吸引部322の突起322aよりも僅かに高く形成される。吸引部322は、減圧チャンバを介さずに直接に気体G’を吸引する手段に接続できる。
あるいは、突起322aに代えて、搬送部312に平行に延びたスリットや、他の形態を採用することもできる。
さらにあるいは、吸引部がベルトを包むカバーを備え、カバー内を負圧にするものであってもよい。これも吸引部が搬送部と同一直線上に並ぶべく配列された態様の一種である。搬送部の全体が負圧になり、ワークWの端部が偏って吸引されることがなく、その平坦性を確保するに有利である。
また、図8(b)に示すごとく、吸引部322に連通した流路330bと、浮上部116に連通した流路330aとを連結し、以って気体Gを循環せしめてもよい。これらは循環部を構成する。ポンプあるいはコンプレッサのごとき手段330にとっては、流入と流出とが釣り合うことにより、エネルギ効率が高まるので、省エネ性の点で有利である。またこの場合、単一の手段330が、気体を吸引する手段と気体を加圧する手段とを兼ねる。
あるいは図9のごとく、搬送部がローラコンベアであってもよい。方向Xに沿って複数のローラ414が配列されており、枠402にそれぞれ回転可能に支持される。複数のローラ414と同一直線上に、好ましくは交互に、複数の吸引部412aが配列されている。ローラ414の各シャフトはプーリ410bに結合しており、電動モータのごとき駆動装置410もプーリ410bに結合している。これらのプーリ410bがベルト410eにより互いに連結されることにより、総てのローラ414が同期して回転する。駆動装置410のシャフト410cは、好ましくは反対側の端にまで延長され、反対側の端のプーリ410bを回転せしめる。以って両端のローラ414が同期して回転する。あるいは、ベルトによらずにシャフトおよびギア機構によって駆動装置を構成してもよい。吸引部412aは、上述の実施形態と同様に、それぞれポンプあるいはコンプレッサのごとき吸引手段に連通しており、ワークWの端を吸引する。
このような態様によっても、ワークWの幅方向両端を平坦に支持する一方、ワークWの中央付近を僅かに撓ませることができる。
図10を参照して、上述の各実施形態が奏する効果を説明する。図10(a)を参照するに、従来技術のごとくワークWの全体的な形状を平坦に保持しようとすると、ワークWの先端が支持されていないとき、自重により先端は矢印Hのごとく下方に撓んでしまう。例えばワークWが一のローラから次のローラへ移動するとき、あるいは、一の搬送装置から次の搬送装置へ移動するときに、このような状態になりうる。ワークWは、下方に撓むことによりローラあるいは搬送装置に衝突しやすい。一方、本実施形態によれば、図10(b)に示すごとく、ワークWの幅方向両端は搬送方向Xに沿って平坦であり、中央付近は僅かに撓む。すると、ワークWが幅方向に波打っているので、搬送方向XにはワークWは自由に変形することができず、それゆえワークWの先端は、支持されていなくても、下方に撓むことがない。ワークWが一のローラから次のローラへ移動するとき、あるいは、一の搬送装置から次の搬送装置へ移動するときであっても、ワークWの先端がローラあるいは搬送装置に衝突することが防止される。
上述の各実施形態が奏する効果を検証する。
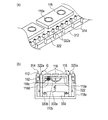
図11は、検証装置500、502の構成を説明するための説明図である。特に、図11(a)は、検証装置500の上面図を示し、図11(b)は、図11(a)のD矢視の側面図を示し、図11(c)は、検証装置502における図11(b)に対応する位置の側面図を示す。ここでは、ワークWとして1300mm×1000mm×0.3mmのアルミ板を用いた。
図11(a)、(b)に示すように、検証装置500は、浮上部504と突起部506とを含んで構成される。浮上部504は、浮上部116と同様、例えば、圧縮空気を噴出する噴出装置等で構成され、ワークWの下方に、ワークWが水平に保たれる圧力より低い圧力を生じさせる。そのため、ワークWは、突起部506で支持つつ、中央部分Wbが鉛直下方に凹んでいる。
また、図11(c)に示すように、検証装置502は、浮上部504と突起部508とを含んで構成される。突起部508は、突起部506よりも高さが低く、浮上部504は圧力を生じさせる機能を停止している。そして、ワークWは、突起部508および浮上部504によって、平坦な状態で支持されている。
検証装置500、502のいずれにおいても、ワークWは、図11(a)中、下方の端部Waが突起部506、508よりも、長さL2だけ突き出て保持される。ここでは、長さL2を、200mmとした。
図12は、検証結果を示すグラフである。特に、図12(a)は、図11(a)のD矢視における、ワークWの端部Waの形状を示し、図12(b)は、初期振動を与えたときのワークWの減衰特性を示す。図12(a)において、横軸は、ワークWの端部Waにおいて、突起部506、508から突き出した位置を示し、縦軸は、端部Waの横軸で示された突き出し位置における高さを示す。また、図12(b)において、横軸は時間(秒)を示し、縦軸は、端部Waのある測定点の高さを示す。
ここで、実線510は、検証装置500によってワークWの中央部分Wbが鉛直下方に凹んで保持されたときの測定結果を示し、破線512は、検証装置502によってワークWが平坦な状態のときの測定結果を示す。
図12(a)に示すように、ワークWが平坦に保持された状態では、端部Waは大きく垂下している。それに対して、ワークWの中央部分Wbが鉛直下方に凹んだ状態では、端部Waの垂下の幅が、ワークWが平坦な状態のときの1/3程度まで低減された。
次に、初期振動が与えられて最大振幅となってから振動が収束するまでにかかる時間を比較する。図12(b)に示すように、ワークWが平坦に保持された状態における時間t1に対して、ワークWの中央部分Wbが鉛直下方に凹んだ状態における時間t2は、半分以下にまで短縮された。
上述したように、検証装置502においては、ワークWは浮上部504と接触しているが、ワークWと浮上部504の接触が、このようなワークWの振動の収束の早さにはほとんど影響がないことは、別途の検証実験によって確認されている。
この検証によって明らかなように、本発明の何れかの実施形態による搬送装置によって、ワークWの中央部分Wbが鉛直下方に凹んだ状態で、ワークWを搬送すれば、ワークWの端部Waの垂下を抑制し、ワークWの振動を抑えて、安定した搬送を遂行可能となる。
好適な実施形態により本発明を説明したが、本発明は上記実施形態に限定されるものではない。上記開示内容に基づき、当該技術分野の通常の技術を有する者が、実施形態の修正ないし変形により本発明を実施することが可能である。
基板の先端の撓みを防止できる搬送装置が提供される。
100 搬送装置
112,312 搬送部
112a,322,412a 吸引部
114,314 突起
116 浮上部
118 支持台
120 減圧チャンバ
414 ローラ
X 搬送方向
W ワーク
G,G’ 気体
112,312 搬送部
112a,322,412a 吸引部
114,314 突起
116 浮上部
118 支持台
120 減圧チャンバ
414 ローラ
X 搬送方向
W ワーク
G,G’ 気体
Claims (6)
- 対象物を気体により浮上させて第1の方向へ搬送するための搬送装置であって、
前記気体を噴出して前記対象物に与圧することにより前記対象物を浮上させる浮上部と、
前記第1の方向に延びた無端のベルトと、前記ベルトから突出して前記対象物に接触可能な複数の突起と、を備え、前記対象物に接触して前記第1の方向へ駆動するべく構成された搬送部と、
前記ベルトと一体であって、前記搬送部と同一直線上に並ぶべく配列され、前記対象物に負圧を与えて前記対象物を前記搬送部に接触せしめる吸引部と、
を備えた搬送装置。 - 請求項1の搬送装置であって、前記吸引部と前記複数の突起とは、前記第1の方向に交互に配置されている、搬送装置。
- 請求項1の搬送装置であって、前記浮上部または前記搬送部は、前記対象物をその幅方向中央において撓ませるべく構成された変形手段を含む、搬送装置。
- 請求項3の搬送装置であって、前記変形手段は、前記複数の突起上における前記対象物の高さよりも低い浮上高さを前記浮上部に生ぜしめるべく構成された気体供給装置、または、前記浮上部における前記対象物の浮上高さよりも高く形成された前記複数の突起である、搬送装置。
- 請求項1の搬送装置であって、
前記吸引部が吸引した前記気体を前記浮上部に循環せしめるべく構成された循環部をさらに備えた搬送装置。 - 請求項1の搬送装置であって、前記複数の突起の各先端は、前記浮上部に向かって下る傾斜を有する、搬送装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2013/054951 WO2014132339A1 (ja) | 2013-02-26 | 2013-02-26 | 搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP6032348B2 true JP6032348B2 (ja) | 2016-11-24 |
| JPWO2014132339A1 JPWO2014132339A1 (ja) | 2017-02-02 |
Family
ID=51427644
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015502607A Active JP6032348B2 (ja) | 2013-02-26 | 2013-02-26 | 搬送装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9469487B2 (ja) |
| JP (1) | JP6032348B2 (ja) |
| KR (1) | KR101773494B1 (ja) |
| CN (2) | CN104822613A (ja) |
| WO (1) | WO2014132339A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5998086B2 (ja) | 2012-04-03 | 2016-09-28 | オイレス工業株式会社 | 浮上用エアプレート |
| CN103381965B (zh) * | 2013-07-02 | 2016-02-03 | 深圳市华星光电技术有限公司 | 一种液晶面板的气浮式导向轮传送装置 |
| TWI731860B (zh) * | 2015-05-28 | 2021-07-01 | 日商尼康股份有限公司 | 物體保持裝置、曝光裝置、平板顯示器之製造方法、以及元件製造方法 |
| JP6605871B2 (ja) * | 2015-08-03 | 2019-11-13 | 東レエンジニアリング株式会社 | 基板浮上搬送装置 |
| CN105151780B (zh) * | 2015-08-28 | 2018-11-23 | 武汉华星光电技术有限公司 | 一种超声波传送装置 |
| US9776809B1 (en) * | 2016-03-31 | 2017-10-03 | Core Flow Ltd. | Conveying system with vacuum wheel |
| US9889995B1 (en) * | 2017-03-15 | 2018-02-13 | Core Flow Ltd. | Noncontact support platform with blockage detection |
| DE102018207337A1 (de) * | 2018-05-09 | 2019-11-14 | Asys Automatisierungssysteme Gmbh | Transportvorrichtung für Substrate, Bearbeitungsvorrichtung |
| CN109018837B (zh) * | 2018-09-10 | 2021-10-01 | 瑞安市金易得机电有限公司 | 一种工件上色用移动输送装置 |
| JP6853520B2 (ja) * | 2018-09-20 | 2021-03-31 | 株式会社Nsc | 浮上搬送装置 |
| KR102268617B1 (ko) * | 2019-10-16 | 2021-06-23 | 세메스 주식회사 | 기판 처리 장치 |
| JP7437186B2 (ja) * | 2020-02-26 | 2024-02-22 | Jswアクティナシステム株式会社 | 浮上搬送装置、及びレーザ処理装置 |
| CN215731621U (zh) * | 2021-02-26 | 2022-02-01 | 京东方科技集团股份有限公司 | 一种基板搬运机械手及基板搬运装置 |
| CN115156142B (zh) * | 2022-05-30 | 2024-04-30 | 江苏亚电科技股份有限公司 | Psg水膜喷淋机构及光伏硅片附水膜方法 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004244186A (ja) * | 2003-02-14 | 2004-09-02 | Ckd Corp | 薄板の搬送用支持装置 |
| JP2005119818A (ja) * | 2003-10-17 | 2005-05-12 | Olympus Corp | 基板搬送装置 |
| JP2005154040A (ja) * | 2003-11-21 | 2005-06-16 | Ishikawajima Harima Heavy Ind Co Ltd | 基板搬送装置 |
| JP2006049493A (ja) * | 2004-08-03 | 2006-02-16 | Dainippon Screen Mfg Co Ltd | 基板搬送モジュールならびにそれを用いた基板搬送装置および基板搬送方法 |
| WO2007088936A1 (ja) * | 2006-02-01 | 2007-08-09 | Hirata Corporation | 気流搬送装置 |
| JP2008066661A (ja) * | 2006-09-11 | 2008-03-21 | Ihi Corp | 基板搬送装置及び基板搬送方法 |
| JP2008260591A (ja) * | 2007-04-10 | 2008-10-30 | Nippon Sekkei Kogyo:Kk | 薄板状材料搬送装置及び方法 |
| JP2010116220A (ja) * | 2008-11-11 | 2010-05-27 | Ihi Corp | 浮上搬送装置 |
| JP2011029225A (ja) * | 2009-07-21 | 2011-02-10 | Sumco Corp | 半導体ウェーハ支持方法,半導体ウェーハ支持用ピン及び半導体ウェーハ支持装置 |
| JP2011210985A (ja) * | 2010-03-30 | 2011-10-20 | Dainippon Screen Mfg Co Ltd | 基板搬送装置および基板処理装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3545813A (en) * | 1969-04-18 | 1970-12-08 | Tsubakimoto Chain Co | Air-film conveying apparatus |
| DE3539876A1 (de) * | 1985-11-11 | 1987-05-14 | Karl Lenhardt | Vorrichtung fuer das schlupffreie foerdern von stueckgut in beliebiger position, insbesondere in geneigter oder im wesentlichen vertikaler stellung |
| JP2001196438A (ja) * | 2000-01-14 | 2001-07-19 | Toray Eng Co Ltd | 薄板状材の搬送装置 |
| JP3682396B2 (ja) | 2000-02-24 | 2005-08-10 | 東レエンジニアリング株式会社 | 薄板状材の定点搬送装置 |
| US6481565B1 (en) * | 2000-09-26 | 2002-11-19 | Bernard J. Sherwood | Conveyor system with pneumatic transfer |
| JP2004210440A (ja) * | 2002-12-27 | 2004-07-29 | Ishikawajima Harima Heavy Ind Co Ltd | 板状体の搬送装置 |
| US7004309B2 (en) * | 2004-07-27 | 2006-02-28 | Sherwood Bernard J | Vacuum belt conveyor system |
| AT501192B1 (de) * | 2004-12-23 | 2007-04-15 | Lisec Peter | Vorrichtung zum transportieren und stützen tafelförmiger gegenstände, insbesondere glastafeln |
| JP5265099B2 (ja) * | 2006-09-11 | 2013-08-14 | オリンパス株式会社 | 基板検査装置 |
| WO2008044706A1 (fr) | 2006-10-10 | 2008-04-17 | Nihon Sekkei Kogyo Co., Ltd. | dispositif de transport d'un matériau en forme de feuille |
-
2013
- 2013-02-26 KR KR1020157015436A patent/KR101773494B1/ko active IP Right Grant
- 2013-02-26 CN CN201380063583.6A patent/CN104822613A/zh active Pending
- 2013-02-26 WO PCT/JP2013/054951 patent/WO2014132339A1/ja active Application Filing
- 2013-02-26 CN CN201810924904.1A patent/CN108974943B/zh active Active
- 2013-02-26 JP JP2015502607A patent/JP6032348B2/ja active Active
-
2015
- 2015-05-07 US US14/706,456 patent/US9469487B2/en active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004244186A (ja) * | 2003-02-14 | 2004-09-02 | Ckd Corp | 薄板の搬送用支持装置 |
| JP2005119818A (ja) * | 2003-10-17 | 2005-05-12 | Olympus Corp | 基板搬送装置 |
| JP2005154040A (ja) * | 2003-11-21 | 2005-06-16 | Ishikawajima Harima Heavy Ind Co Ltd | 基板搬送装置 |
| JP2006049493A (ja) * | 2004-08-03 | 2006-02-16 | Dainippon Screen Mfg Co Ltd | 基板搬送モジュールならびにそれを用いた基板搬送装置および基板搬送方法 |
| WO2007088936A1 (ja) * | 2006-02-01 | 2007-08-09 | Hirata Corporation | 気流搬送装置 |
| JP2008066661A (ja) * | 2006-09-11 | 2008-03-21 | Ihi Corp | 基板搬送装置及び基板搬送方法 |
| JP2008260591A (ja) * | 2007-04-10 | 2008-10-30 | Nippon Sekkei Kogyo:Kk | 薄板状材料搬送装置及び方法 |
| JP2010116220A (ja) * | 2008-11-11 | 2010-05-27 | Ihi Corp | 浮上搬送装置 |
| JP2011029225A (ja) * | 2009-07-21 | 2011-02-10 | Sumco Corp | 半導体ウェーハ支持方法,半導体ウェーハ支持用ピン及び半導体ウェーハ支持装置 |
| JP2011210985A (ja) * | 2010-03-30 | 2011-10-20 | Dainippon Screen Mfg Co Ltd | 基板搬送装置および基板処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104822613A (zh) | 2015-08-05 |
| CN108974943B (zh) | 2021-06-29 |
| WO2014132339A1 (ja) | 2014-09-04 |
| JPWO2014132339A1 (ja) | 2017-02-02 |
| KR20150084971A (ko) | 2015-07-22 |
| US20150239682A1 (en) | 2015-08-27 |
| US9469487B2 (en) | 2016-10-18 |
| KR101773494B1 (ko) | 2017-08-31 |
| CN108974943A (zh) | 2018-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6032348B2 (ja) | 搬送装置 | |
| WO2013161375A1 (ja) | 搬送装置 | |
| JP5170839B2 (ja) | ガラス基板の搬送方法 | |
| JPWO2008044706A1 (ja) | 薄板状材料搬送装置 | |
| TWI393205B (zh) | 基板搬送裝置及基板搬送方法 | |
| JP4349101B2 (ja) | 基板搬送装置 | |
| CN101121466B (zh) | 薄板状材料输送用气动工作台以及薄板状材料输送装置 | |
| JP2017006457A5 (ja) | ||
| WO2013161376A1 (ja) | 搬送装置 | |
| JP6804155B2 (ja) | 基板浮上搬送装置 | |
| KR20100054857A (ko) | 부상 장치 및 부상 반송 장치 | |
| TWI491547B (zh) | Handling device | |
| JP4171293B2 (ja) | 薄板状材の搬送方法及び装置 | |
| KR101049872B1 (ko) | 부상 반송 장치 | |
| JP5902909B2 (ja) | 移動装置 | |
| JP2013118307A (ja) | 搬送装置 | |
| JP3183619U (ja) | 傾斜式回路基板搬送装置 | |
| JP5604940B2 (ja) | 浮上搬送装置 | |
| JP4790279B2 (ja) | 板材搬送方法および板材搬送装置 | |
| JP2013116804A (ja) | 搬送装置 | |
| JP2011219209A (ja) | 浮上搬送装置、方向転換装置、及び浮上ユニット | |
| JP5773158B2 (ja) | 薄板状ワーク保管装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20161010 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6032348 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |