JP5403330B2 - 駐車支援装置 - Google Patents
駐車支援装置 Download PDFInfo
- Publication number
- JP5403330B2 JP5403330B2 JP2009043007A JP2009043007A JP5403330B2 JP 5403330 B2 JP5403330 B2 JP 5403330B2 JP 2009043007 A JP2009043007 A JP 2009043007A JP 2009043007 A JP2009043007 A JP 2009043007A JP 5403330 B2 JP5403330 B2 JP 5403330B2
- Authority
- JP
- Japan
- Prior art keywords
- parking
- vehicle
- guidance
- unit
- steering
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images











Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0285—Parking performed automatically
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/06—Automatic manoeuvring for parking
Description
車両を駐車させる位置に関する駐車位置情報を取得する駐車位置情報取得部と、
前記駐車位置情報に基づいて駐車目標位置を設定する駐車目標位置設定部と、
前記駐車目標位置へ自動操舵により前記車両を誘導する誘導経路を演算する誘導経路演算部と、
前記誘導経路が成立した際に前記誘導経路が成立したことを前記車両のドライバーに報知する報知情報を出力する報知情報出力部と、
舵取り装置を前記ドライバーが保持していない非保持状態であるか否かを判定する非保持状態判定部と、
前記舵取り装置を制御して自動操舵により前記車両を後退開始位置から前記駐車目標位置へ誘導する誘導部と、
前記報知情報出力部により前記報知情報が出力された後、確認ボタン、誘導開始ボタン及びシフト操作を含む操作部への前記ドライバーの操作を必要とすることなく、前記誘導経路が成立し且つ前記非保持状態であることを条件として、前記誘導部が前記車両を自動操舵により誘導可能な誘導可能状態であると判定すると共に、当該判定結果に基づいて前記誘導部に誘導を開始させる誘導開始判定部と、
を備える点にある。

2:駐車目標位置設定部
3:誘導経路演算部
4:報知情報出力部
5:非保持状態判定部
6:誘導部
7:誘導開始判定部
8:移動状態判定部
10:ECU(駐車支援装置)
30:車両
41:ステアリングホイール(舵取り装置)
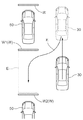
K:誘導経路
P2:駐車目標位置
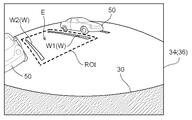
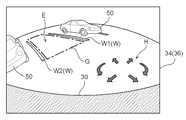
ROI:関心領域(舵取り装置の操作に基づいて設定される所定の領域)
Claims (3)
- 車両を駐車させる位置に関する駐車位置情報を取得する駐車位置情報取得部と、
前記駐車位置情報に基づいて駐車目標位置を設定する駐車目標位置設定部と、
前記駐車目標位置へ自動操舵により前記車両を誘導する誘導経路を演算する誘導経路演算部と、
前記誘導経路が成立した際に前記誘導経路が成立したことを前記車両のドライバーに報知する報知情報を出力する報知情報出力部と、
舵取り装置を前記ドライバーが保持していない非保持状態であるか否かを判定する非保持状態判定部と、
前記舵取り装置を制御して自動操舵により前記車両を後退開始位置から前記駐車目標位置へ誘導する誘導部と、
前記報知情報出力部により前記報知情報が出力された後、確認ボタン、誘導開始ボタン及びシフト操作を含む操作部への前記ドライバーの操作を必要とすることなく、前記誘導経路が成立し且つ前記非保持状態であることを条件として、前記誘導部が前記車両を自動操舵により誘導可能な誘導可能状態であると判定すると共に、当該判定結果に基づいて前記誘導部に誘導を開始させる誘導開始判定部と、
を備える駐車支援装置。 - 前記車両が移動しているか否かを判定する移動状態判定部を有し、
前記誘導開始判定部は、前記誘導可能状態において、前記車両が移動していると判定された場合に、前記誘導部に誘導を開始させる請求項1に記載の駐車支援装置。 - 前記駐車目標位置設定部は、前記ドライバーによる前記舵取り装置の操作に基づいて設定される所定の領域に応じて取得された前記駐車位置情報に基づいて前記駐車目標位置を設定する請求項1又は2に記載の駐車支援装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009043007A JP5403330B2 (ja) | 2009-02-25 | 2009-02-25 | 駐車支援装置 |
| CN2010800036944A CN102405154B (zh) | 2009-02-25 | 2010-01-29 | 驻车辅助装置 |
| EP10746051.1A EP2402219B1 (en) | 2009-02-25 | 2010-01-29 | Parking assistance device |
| KR1020117014519A KR20110097902A (ko) | 2009-02-25 | 2010-01-29 | 주차지원장치 |
| PCT/JP2010/051221 WO2010098170A1 (ja) | 2009-02-25 | 2010-01-29 | 駐車支援装置 |
| US13/141,904 US8816878B2 (en) | 2009-02-25 | 2010-01-29 | Parking assist apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009043007A JP5403330B2 (ja) | 2009-02-25 | 2009-02-25 | 駐車支援装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010195224A JP2010195224A (ja) | 2010-09-09 |
| JP2010195224A5 JP2010195224A5 (ja) | 2011-07-28 |
| JP5403330B2 true JP5403330B2 (ja) | 2014-01-29 |
Family
ID=42665380
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009043007A Expired - Fee Related JP5403330B2 (ja) | 2009-02-25 | 2009-02-25 | 駐車支援装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8816878B2 (ja) |
| EP (1) | EP2402219B1 (ja) |
| JP (1) | JP5403330B2 (ja) |
| KR (1) | KR20110097902A (ja) |
| CN (1) | CN102405154B (ja) |
| WO (1) | WO2010098170A1 (ja) |
Families Citing this family (71)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009028261A1 (de) * | 2009-08-05 | 2011-02-10 | Robert Bosch Gmbh | Verfahren und Steuerung zur Kalibrierung einer automatisch lenkenden Einparkhilfe |
| JP5113881B2 (ja) * | 2010-06-03 | 2013-01-09 | 株式会社デンソー | 車両周辺監視装置 |
| DE102011112577A1 (de) * | 2011-09-08 | 2013-03-14 | Continental Teves Ag & Co. Ohg | Verfahren und Vorrichtung für ein Assistenzsystem in einem Fahrzeg zur Durchführung eines autonomen oder teilautonomen Fahrmanövers |
| DE102011113916A1 (de) * | 2011-09-21 | 2013-03-21 | Volkswagen Aktiengesellschaft | Verfahren zur Klassifikation von Parkszenarien für ein Einparksystem eines Kraftfahrzeugs |
| KR101316501B1 (ko) * | 2011-10-14 | 2013-10-10 | 현대자동차주식회사 | 메쉬형 공간 해석기법을 이용한 주차 공간 탐지방법 및 그 시스템 |
| KR101327736B1 (ko) * | 2011-12-23 | 2013-11-11 | 현대자동차주식회사 | Avm탑뷰 기반 주차지원 시스템 |
| DE102012001666A1 (de) | 2012-01-28 | 2013-08-01 | Audi Ag | Verfahren zum Lenken eines Fahrzeugs mittels eines Lenkassistenzsystems |
| KR20130094994A (ko) * | 2012-02-17 | 2013-08-27 | 현대모비스 주식회사 | 주차 가능 영역 변경 장치 및 그 방법 |
| DE102012101686A1 (de) * | 2012-03-01 | 2013-09-05 | Continental Teves Ag & Co. Ohg | Verfahren für ein Fahrerassistenzsystem zur autonomen Längs- und/oder Querregelung eines Fahrzeugs |
| KR101877570B1 (ko) * | 2012-04-04 | 2018-07-11 | 현대자동차주식회사 | Av 영상 기반의 주차위치 설정 장치 및 그 방법 |
| KR20130118116A (ko) * | 2012-04-19 | 2013-10-29 | 현대모비스 주식회사 | 자동 주차 보조 시스템에서 장애물 충돌 회피 장치 및 방법 |
| US8954241B2 (en) | 2012-08-10 | 2015-02-10 | Caterpillar Inc. | Mining truck spotting under a shovel |
| WO2014091613A1 (ja) * | 2012-12-13 | 2014-06-19 | トヨタ自動車株式会社 | 駐車支援装置 |
| JP6281178B2 (ja) * | 2013-01-31 | 2018-02-21 | 住友ベークライト株式会社 | 電子装置、自動車および電子装置の製造方法 |
| WO2014192107A1 (ja) | 2013-05-29 | 2014-12-04 | トヨタ自動車 株式会社 | 駐車支援装置 |
| KR102062923B1 (ko) * | 2013-06-12 | 2020-01-06 | 현대모비스 주식회사 | 주차지원시스템 |
| US9708003B2 (en) | 2013-06-26 | 2017-07-18 | Toyota Jidosha Kabushiki Kaisha | Parking assist device |
| KR20150042106A (ko) * | 2013-10-10 | 2015-04-20 | 현대자동차주식회사 | 차량의 변속 장치 |
| JP6120371B2 (ja) * | 2013-10-23 | 2017-04-26 | クラリオン株式会社 | 自動駐車制御装置および駐車支援装置 |
| DE102013224539A1 (de) * | 2013-11-29 | 2015-06-03 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren, Vorrichtung, Computerprogramm und Computerprogrammprodukt zur Bilddatenübertragung |
| KR102175961B1 (ko) * | 2013-11-29 | 2020-11-09 | 현대모비스 주식회사 | 차량 후방 주차 가이드 장치 |
| KR101498976B1 (ko) * | 2013-12-19 | 2015-03-05 | 현대모비스(주) | 차량용 주차지원시스템 및 주차지원방법 |
| US9514366B2 (en) * | 2014-02-03 | 2016-12-06 | Xerox Corporation | Vehicle detection method and system including irrelevant window elimination and/or window score degradation |
| DE102014209227B4 (de) * | 2014-05-15 | 2022-03-17 | Ford Global Technologies, Llc | Parkassistenzsystem |
| US9436182B2 (en) * | 2014-05-23 | 2016-09-06 | Google Inc. | Autonomous vehicles |
| US9631933B1 (en) | 2014-05-23 | 2017-04-25 | Google Inc. | Specifying unavailable locations for autonomous vehicles |
| CN104015660A (zh) * | 2014-06-23 | 2014-09-03 | 镇江杭川机械制造有限公司 | 车辆视觉驻车系统 |
| CN104260722B (zh) * | 2014-09-23 | 2017-06-06 | 北京理工大学 | 一种自动泊车系统 |
| DE102014224077A1 (de) * | 2014-11-26 | 2016-06-02 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum assistierten Führen eines Fahrzeugs |
| WO2016147368A1 (ja) * | 2015-03-19 | 2016-09-22 | 三菱電機株式会社 | 運転制御装置及び運転制御方法 |
| KR102327345B1 (ko) * | 2015-07-14 | 2021-11-17 | 주식회사 만도모빌리티솔루션즈 | 주차제어시스템 및 그 제어방법 |
| JP2017024683A (ja) * | 2015-07-28 | 2017-02-02 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP6547495B2 (ja) * | 2015-07-31 | 2019-07-24 | アイシン精機株式会社 | 駐車支援装置 |
| JP6264338B2 (ja) * | 2015-08-07 | 2018-01-24 | トヨタ自動車株式会社 | 車線維持支援装置 |
| DE102015216881A1 (de) * | 2015-09-03 | 2017-03-09 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum fahrerlosen Führen eines Kraftfahrzeugs innerhalb eines Parkplatzes |
| DE102016211182A1 (de) * | 2015-09-08 | 2017-03-09 | Volkswagen Aktiengesellschaft | Verfahren, Vorrichtung und System zum Durchführen einer automatisierten Fahrt eines Fahrzeugs entlang einer aus einer Karte bereitgestellten Trajektorie |
| US9809158B2 (en) * | 2015-09-29 | 2017-11-07 | Toyota Motor Engineering & Manufacturing North America, Inc. | External indicators and notifications for vehicles with autonomous capabilities |
| WO2017072942A1 (ja) * | 2015-10-30 | 2017-05-04 | 三菱電機株式会社 | 報知制御装置及び報知制御方法 |
| JP6694710B2 (ja) * | 2015-12-25 | 2020-05-20 | 株式会社デンソーテン | 駐車支援装置、駐車支援方法、及び、駐車支援システム |
| US9773417B2 (en) * | 2016-01-08 | 2017-09-26 | Ford Global Technologies, Llc | Enhanced park assist system |
| JP2017140890A (ja) * | 2016-02-09 | 2017-08-17 | ソニー株式会社 | 情報処理装置、情報処理方法、及び、プログラム |
| CN105835876B (zh) * | 2016-03-27 | 2018-01-26 | 张铮 | 基于计算机控制的智能停车系统 |
| US20180018879A1 (en) * | 2016-07-14 | 2018-01-18 | John Frederick Brownell | Garage Laser Parking Guide |
| DE102016220448A1 (de) * | 2016-10-19 | 2018-04-19 | Ford Global Technologies, Llc | Vorrichtung zur Unterstützung eines Manövriervorganges eines Kraftfahrzeuges |
| DE102017204830A1 (de) | 2017-03-22 | 2018-09-27 | Ford Global Technologies, Llc | Verfahren und Fahrerassistenzsystem zur Unterstützung des Ein- und/oder Ausparkens eines Kraftfahrzeugs |
| US10403144B1 (en) * | 2017-05-08 | 2019-09-03 | Open Invention Network Llc | Mobile device transport parking notification and movement tracking |
| US9892642B1 (en) | 2017-05-08 | 2018-02-13 | Open Invention Network Llc | Mobile device transport parking notification and movement tracking |
| DE102017208385A1 (de) * | 2017-05-18 | 2018-11-22 | Ford Global Technologies, Llc | Verfahren zum Unterstützen eines Einparkvorgangs eines Kraftfahrzeugs, elektronisches Einparkhilfesystem sowie Kraftfahrzeug |
| KR102001916B1 (ko) | 2017-05-30 | 2019-07-19 | 엘지전자 주식회사 | 주차 보조 시스템 |
| JP2018203214A (ja) * | 2017-06-09 | 2018-12-27 | アイシン精機株式会社 | 駐車支援装置、駐車支援方法、運転支援装置、および運転支援方法 |
| JP6841331B2 (ja) | 2017-07-24 | 2021-03-10 | 富士通株式会社 | 車両駐車支援装置、車両駐車支援プログラム |
| JP6800120B2 (ja) * | 2017-09-20 | 2020-12-16 | 株式会社東海理化電機製作所 | 操作状況検出装置 |
| JP7040098B2 (ja) * | 2018-02-15 | 2022-03-23 | トヨタ自動車株式会社 | 操舵支援装置 |
| JP6917330B2 (ja) | 2018-03-28 | 2021-08-11 | 日立Astemo株式会社 | 駐車支援装置 |
| CN109895764B (zh) * | 2018-06-29 | 2023-06-27 | 华为技术有限公司 | 确定自动泊车策略的方法和装置 |
| US10891866B2 (en) * | 2018-11-13 | 2021-01-12 | Hall Labs Llc | Parking assist apparatus |
| KR20200061021A (ko) | 2018-11-23 | 2020-06-02 | 이재룡 | IoT기반 화재 대피 유도기 |
| JP7120036B2 (ja) * | 2019-01-16 | 2022-08-17 | トヨタ自動車株式会社 | 自動駐車管理装置 |
| CN111832340B (zh) * | 2019-04-16 | 2023-08-29 | 杭州海康威视数字技术股份有限公司 | 一种停车入库方法、装置和系统 |
| JP7097866B2 (ja) * | 2019-09-24 | 2022-07-08 | 本田技研工業株式会社 | 遠隔駐車システム |
| JP7207254B2 (ja) * | 2019-10-11 | 2023-01-18 | トヨタ自動車株式会社 | 車両駐車支援装置 |
| JP7226235B2 (ja) * | 2019-10-11 | 2023-02-21 | トヨタ自動車株式会社 | 車両駐車支援装置 |
| US20220219678A1 (en) * | 2020-02-10 | 2022-07-14 | Nissan Motor Co., Ltd. | Parking Assist Method and Parking Assist Apparatus |
| JP7465668B2 (ja) * | 2020-02-13 | 2024-04-11 | フォルシアクラリオン・エレクトロニクス株式会社 | 車載装置、駐車支援システム及び駐車支援方法 |
| JP2021149702A (ja) * | 2020-03-19 | 2021-09-27 | 本田技研工業株式会社 | 収容領域管理装置 |
| JP7448394B2 (ja) * | 2020-03-26 | 2024-03-12 | 本田技研工業株式会社 | 駐車支援システム |
| JP7429141B2 (ja) * | 2020-03-26 | 2024-02-07 | 本田技研工業株式会社 | 駐車支援システム |
| CN111547046B (zh) * | 2020-04-30 | 2022-05-06 | 惠州华阳通用电子有限公司 | 一种平行车位预占式自动泊车方法及装置 |
| JP2022064677A (ja) | 2020-10-14 | 2022-04-26 | 株式会社デンソー | 表示制御装置、表示装置及び表示制御プログラム |
| WO2022082404A1 (zh) * | 2020-10-20 | 2022-04-28 | 华为技术有限公司 | 一种信息提示的方法、车辆控制的方法以及相关装置 |
| CN116039662B (zh) * | 2023-03-30 | 2023-08-08 | 深圳曦华科技有限公司 | 自动驾驶控制方法及相关装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3622329B2 (ja) * | 1996-03-08 | 2005-02-23 | スズキ株式会社 | 車両操舵装置 |
| JP3763222B2 (ja) * | 1998-11-19 | 2006-04-05 | 日産自動車株式会社 | 車両の自動操舵装置 |
| JP4161573B2 (ja) | 2001-06-29 | 2008-10-08 | 株式会社豊田自動織機 | 駐車支援装置 |
| JP3912279B2 (ja) * | 2002-12-24 | 2007-05-09 | 三菱自動車工業株式会社 | 自動操舵制御装置付き自動車 |
| JP2005313710A (ja) | 2004-04-27 | 2005-11-10 | Toyota Motor Corp | 駐車支援装置 |
| JP4432736B2 (ja) * | 2004-11-09 | 2010-03-17 | 株式会社デンソー | 駐車支援システム |
| JP4020128B2 (ja) * | 2005-04-22 | 2007-12-12 | トヨタ自動車株式会社 | 目標位置設定装置およびそれを備えた駐車支援装置 |
| JP2007030700A (ja) | 2005-07-27 | 2007-02-08 | Aisin Seiki Co Ltd | 駐車支援装置 |
| JP4380655B2 (ja) * | 2006-04-25 | 2009-12-09 | トヨタ自動車株式会社 | 駐車支援装置及び駐車支援方法 |
| JP4635017B2 (ja) | 2007-02-22 | 2011-02-16 | アイシン精機株式会社 | 駐車支援装置 |
| WO2009060663A1 (ja) * | 2007-11-08 | 2009-05-14 | Bosch Corporation | 駐車支援装置 |
-
2009
- 2009-02-25 JP JP2009043007A patent/JP5403330B2/ja not_active Expired - Fee Related
-
2010
- 2010-01-29 WO PCT/JP2010/051221 patent/WO2010098170A1/ja active Application Filing
- 2010-01-29 CN CN2010800036944A patent/CN102405154B/zh not_active Expired - Fee Related
- 2010-01-29 US US13/141,904 patent/US8816878B2/en not_active Expired - Fee Related
- 2010-01-29 EP EP10746051.1A patent/EP2402219B1/en active Active
- 2010-01-29 KR KR1020117014519A patent/KR20110097902A/ko not_active Application Discontinuation
Also Published As
| Publication number | Publication date |
|---|---|
| KR20110097902A (ko) | 2011-08-31 |
| EP2402219B1 (en) | 2019-06-05 |
| WO2010098170A1 (ja) | 2010-09-02 |
| US20110273310A1 (en) | 2011-11-10 |
| EP2402219A4 (en) | 2017-10-18 |
| CN102405154B (zh) | 2013-10-02 |
| US8816878B2 (en) | 2014-08-26 |
| CN102405154A (zh) | 2012-04-04 |
| JP2010195224A (ja) | 2010-09-09 |
| EP2402219A1 (en) | 2012-01-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5403330B2 (ja) | 駐車支援装置 | |
| JP5182545B2 (ja) | 駐車支援装置 | |
| KR101190482B1 (ko) | 주차지원장치 | |
| JP5212748B2 (ja) | 駐車支援装置 | |
| KR101155725B1 (ko) | 주차 지원 장치 | |
| JP5429514B2 (ja) | 駐車支援装置 | |
| WO2010098216A1 (ja) | 駐車支援装置 | |
| JP2010202010A (ja) | 駐車支援装置 | |
| JP2008162426A (ja) | 駐車支援装置 | |
| JP5044136B2 (ja) | 駐車支援装置 | |
| JP2012076483A (ja) | 駐車支援装置 | |
| JP5446139B2 (ja) | 駐車支援装置及び駐車支援方法 | |
| JP2006273122A (ja) | 駐車制動アシスト装置 | |
| JP5013205B2 (ja) | 駐車支援装置 | |
| JP5445852B2 (ja) | 駐車支援装置 | |
| JP2009298384A (ja) | 駐車を支援するための装置 | |
| JP2009126353A (ja) | 駐車支援装置 | |
| JP2006027334A (ja) | 運転支援装置および方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110624 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130502 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131003 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131016 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5403330 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |