JP5237608B2 - 医療装置 - Google Patents
医療装置 Download PDFInfo
- Publication number
- JP5237608B2 JP5237608B2 JP2007277901A JP2007277901A JP5237608B2 JP 5237608 B2 JP5237608 B2 JP 5237608B2 JP 2007277901 A JP2007277901 A JP 2007277901A JP 2007277901 A JP2007277901 A JP 2007277901A JP 5237608 B2 JP5237608 B2 JP 5237608B2
- Authority
- JP
- Japan
- Prior art keywords
- treatment instrument
- bending
- endoscope
- insertion portion
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/273—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for the upper alimentary canal, e.g. oesophagoscopes, gastroscopes
- A61B1/2736—Gastroscopes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00064—Constructional details of the endoscope body
- A61B1/00071—Insertion part of the endoscope body
- A61B1/0008—Insertion part of the endoscope body characterised by distal tip features
- A61B1/00098—Deflecting means for inserted tools
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00131—Accessories for endoscopes
- A61B1/00133—Drive units for endoscopic tools inserted through or with the endoscope
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/005—Flexible endoscopes
- A61B1/0051—Flexible endoscopes with controlled bending of insertion part
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/012—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor
- A61B1/018—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor characterised by internal passages or accessories therefor for receiving instruments
Description
図1乃至図26を参照して医療装置の第1実施形態を説明する。
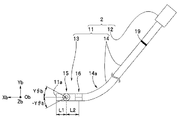
スタッフの押し込み操作によって曲がり癖部14aが曲がり部33cに収まって前記図6で示したように処置具挿入部11が予め既定した姿勢で内視鏡3の外部に導出される。このとき、画面上には処置具挿入部11の先端11a及び先端湾曲部13の一部が所定の姿勢で表示される。このことによって、処置具挿入部11の処置具チャンネル33内への挿入が完了する。
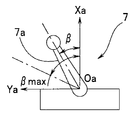
なお、本実施形態においても、操作レバー7aをR方向またはL方向に傾倒操作したときには、第2関節16が操作レバー7aの傾倒された角度だけ傾倒方向に対応して回転する。
なお、本実施形態においても、操作レバー7aをR方向またはL方向に傾倒操作したときには、第2関節16が操作レバー7aの傾倒された角度だけ傾倒方向に対応して回転する。
図28の医療装置1Bは、統合医療機器8Bを備えている。統合コントローラ6Aは、統合コントローラ6Aと入力装置7とを備えて構成される。統合コントローラ6Aは、判定手段である画像データ取得部6bと計測指示スイッチ6cと制御部6dとを備えている。画像データ取得部6bは、前記カメラコントロールユニットに備えられている画像処理回路で生成された内視鏡画像の画像データを取得する。統合医療機器8Bにおいては、例えば、スタッフによって、計測指示スイッチ6cがON操作されることによって、制御部6dは、画像データ取得部6bで取得した画像データから処置具2の先端湾曲部13に設けられているマーカを読み取って、内視鏡3から導出される処置具挿入部11の姿勢及び位置関係を取得する。
まず、医療従事者(以下、スタッフはと記載する)は、図28に示される医療装置1Bを構成する。
5…起上台コントローラ 6…統合コントローラ 7…入力装置
7a…操作レバー 8…統合医療機器 11…処置具挿入部 11a…先端
12…湾曲駆動部 13…先端湾曲部 13f…先端湾曲駒
13m…中央湾曲駒 13r…基端湾曲駒 14a…曲がり癖部
15…第1関節 16…第2関節 17…第1の駆動アクチュエータ
18…第2の駆動アクチュエータ 19…突出量検出用マーカ
32…処置具挿通口 33…処置具チャンネル 33c…曲がり部
35…起上台 40…起上用関節
Claims (9)
- 湾曲部を備える挿入部と、前記湾曲部を湾曲させる駆動力を発生するための電気的に駆動される第1駆動部と、前記第1駆動部を駆動制御するための第1制御装置と、を備える能動処置具と、
前記能動処置具の挿入部に外力を付与して該挿入部を移動させるための外力付与部と、この外力付与部を動作させる駆動力を発生するための電気的に駆動される第2駆動部と、この第2駆動部を駆動制御するための第2制御装置と、を備える内視鏡と
前記内視鏡に設けられた外力付与部の外力が前記能動処置具の挿入部に付与可能な状態において、該処置具の挿入部の先端を目標位置、目標姿勢、又は目標方向に移動させる指示を行うための統合入力装置と、
前記能動処置具の第1制御装置及び前記内視鏡の第2制御装置が接続され、前記統合入力装置からの指示に基づいて、前記第1制御装置及び前記第2制御装置をそれぞれ駆動制御する統合制御装置と、
を具備することを特徴とする医療装置。 - 前記能動処置具は、前記第1駆動部を駆動させて該処置具の湾曲部を湾曲動作させて、前記挿入部の先端を目標位置、目標姿勢、又は目標方向に移動させる指示を行う第1入力部を備え、
前記内視鏡は、前記第2駆動部を駆動させて該内視鏡の外力付与部を動作させて、この外力付与部の先端を目標位置、目標姿勢、又は目標方向に移動させる指示を行う第2入力部を備えることを特徴とする請求項1に記載の医療装置。 - 前記内視鏡の外力付与部の外力が、前記能動処置具の挿入部に付与可能な状態において、
前記内視鏡の外力付与部と、前記能動処置具の湾曲部の位置と姿勢の関係とを既定する既定手段を備えることを特徴とする請求項1又は請求項2に記載の医療装置。 - 前記外力付与部は、内視鏡チャンネル先端に設けられた能動湾曲付与機構であり、
前記既定手段は、前記能動湾曲付与機構に対する前記挿入部のこの挿入部長軸廻りの回転量と、前記能動湾曲付与機構から突出する前記挿入部の突出量とを既定することを特徴とする請求項3に記載の医療装置。 - 前記統合制御装置は、
前記内視鏡の外力付与部の外力が、前記能動処置具の挿入部に付与可能な状態において、
前記内視鏡から導出されている前記能動処置具の挿入部の位置と姿勢とを判定する判定手段を備えることを特徴とする請求項1乃至請求項4の何れか1項に記載の医療装置。 - 前記判定手段は、前記能動湾曲付与機構に対する前記挿入部のこの挿入部長軸廻りの回転量と、前記能動湾曲付与機構から突出する前記挿入部の突出量とを判定することを特徴とする請求項5に記載の医療装置。
- 前記能動処置具は、前記挿入部に備えられた湾曲部を予め定めた軸を基準に一方向及び他方向に予め定めた角度回転させる関節を備えることを特徴とする請求項1に記載の医療装置。
- 、
前記内視鏡は、前記外力付与部を予め定めた軸を基準に回転させて、前記能動処置具の挿入部を湾曲させる、回動自在な関節を備えることを特徴とする請求項1に記載の医療装置。 - 前記既定手段は、
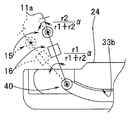
前記能動処置具の挿入部の可撓管部に設けられた、予め定めた半径で、該処置具の第1関節の回転方向に一致した湾曲形状を有する曲がり癖部及び前記内視鏡から外部に導出される前記能動処置具の挿入部の突出量を既定する突出量検出用マークと、
前記内視鏡が備える処置具チャンネルの先端開口側に設けられた、該処置具チャンネルに挿通された前記能動処置具の挿入部の曲がり癖部の湾曲形状に一致した曲がり部と、
を備えることを特徴とする請求項3に記載の医療装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007277901A JP5237608B2 (ja) | 2007-10-25 | 2007-10-25 | 医療装置 |
| CN2008101706219A CN101416866B (zh) | 2007-10-25 | 2008-10-22 | 医疗装置 |
| EP08018480A EP2052671B1 (en) | 2007-10-25 | 2008-10-22 | Medical apparatus e.g. for bile or pancreatic duct |
| US12/257,924 US8187169B2 (en) | 2007-10-25 | 2008-10-24 | Medical apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007277901A JP5237608B2 (ja) | 2007-10-25 | 2007-10-25 | 医療装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009101077A JP2009101077A (ja) | 2009-05-14 |
| JP5237608B2 true JP5237608B2 (ja) | 2013-07-17 |
Family
ID=40293760
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007277901A Expired - Fee Related JP5237608B2 (ja) | 2007-10-25 | 2007-10-25 | 医療装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8187169B2 (ja) |
| EP (1) | EP2052671B1 (ja) |
| JP (1) | JP5237608B2 (ja) |
| CN (1) | CN101416866B (ja) |
Families Citing this family (38)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5477800B2 (ja) * | 2008-02-27 | 2014-04-23 | 株式会社日立製作所 | 回転状態検出装置の作動方法および回転状態検出装置 |
| JP5336760B2 (ja) | 2008-05-01 | 2013-11-06 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム |
| EP2486846A4 (en) * | 2009-10-09 | 2016-07-13 | Olympus Corp | ENDOSCOPE DEVICE |
| JP5647780B2 (ja) * | 2009-10-20 | 2015-01-07 | Hoya株式会社 | 処置用オーバーチューブ及び処置システム |
| EP2401952B1 (en) * | 2010-02-26 | 2016-12-28 | Olympus Corporation | Endoscope apparatus |
| USD668762S1 (en) * | 2011-03-31 | 2012-10-09 | Karl Storz Gmbh & Co. Kg | Handle for medical device |
| BRDI7104784S (pt) * | 2011-03-31 | 2013-10-22 | Configuração aplicada em instrumento médico | |
| EP2702923A4 (en) * | 2011-06-16 | 2014-11-05 | Olympus Medical Systems Corp | ENDOSCOPE |
| JP6300801B2 (ja) * | 2013-02-25 | 2018-03-28 | オリンパス株式会社 | 医療用マニピュレータおよび医療用マニピュレータの制御方法 |
| JP6242101B2 (ja) * | 2013-07-26 | 2017-12-06 | オリンパス株式会社 | 医療装置および医療システム |
| JP6245877B2 (ja) | 2013-07-26 | 2017-12-13 | オリンパス株式会社 | 内視鏡処置具用操作入力装置 |
| WO2015060207A1 (ja) | 2013-10-22 | 2015-04-30 | オリンパス株式会社 | マニピュレータシステムの制御方法およびマニピュレータシステム |
| JP6053701B2 (ja) * | 2013-10-22 | 2016-12-27 | オリンパス株式会社 | マニピュレータシステムの制御方法およびマニピュレータシステム |
| JP6165080B2 (ja) | 2014-02-21 | 2017-07-19 | オリンパス株式会社 | マニピュレータシステムの初期化方法 |
| JP6234267B2 (ja) * | 2014-02-21 | 2017-11-22 | オリンパス株式会社 | 手術用マニピュレータ操作装置および手術用マニピュレータシステム |
| JP6353665B2 (ja) | 2014-02-21 | 2018-07-04 | オリンパス株式会社 | マニピュレータの初期化方法、マニピュレータ、およびマニピュレータシステム |
| JP6278737B2 (ja) | 2014-02-26 | 2018-02-14 | オリンパス株式会社 | 医療用システムの作動方法 |
| JP6188603B2 (ja) | 2014-02-27 | 2017-08-30 | オリンパス株式会社 | 医療用システム |
| JP6270537B2 (ja) | 2014-02-27 | 2018-01-31 | オリンパス株式会社 | 医療用システム |
| JP6278747B2 (ja) | 2014-02-28 | 2018-02-14 | オリンパス株式会社 | マニピュレータのキャリブレーション方法、マニピュレータ、およびマニピュレータシステム |
| US11234581B2 (en) * | 2014-05-02 | 2022-02-01 | Endochoice, Inc. | Elevator for directing medical tool |
| JP6238844B2 (ja) | 2014-06-17 | 2017-11-29 | オリンパス株式会社 | 手術用マニピュレータ操作装置および手術用マニピュレータシステム |
| JP6169049B2 (ja) * | 2014-06-19 | 2017-07-26 | オリンパス株式会社 | マニピュレータの制御方法、マニピュレータ、およびマニピュレータシステム |
| CN106455920B (zh) | 2014-09-05 | 2018-08-07 | 奥林巴斯株式会社 | 内窥镜系统 |
| WO2016098577A1 (ja) * | 2014-12-19 | 2016-06-23 | オリンパス株式会社 | 内視鏡システム |
| CN106999254B (zh) | 2015-02-26 | 2019-09-03 | 奥林巴斯株式会社 | 机械手系统 |
| WO2016189765A1 (ja) * | 2015-05-28 | 2016-12-01 | オリンパス株式会社 | 内視鏡システム |
| JP6656611B2 (ja) * | 2015-07-24 | 2020-03-04 | 公立大学法人広島市立大学 | 3次元形状計測装置、診断システム及び3次元形状計測方法 |
| US10806489B2 (en) * | 2015-07-31 | 2020-10-20 | Purdue Research Foundation | Systems and methods for performing a surgical procedure |
| BR122022007763B1 (pt) | 2016-02-05 | 2023-03-14 | Board Of Regents Of The University Of Texas System | Método para a preparação de um acionador de polímero eletroativo iônico de um dispositivo médico tubular |
| CN113303917A (zh) | 2016-02-05 | 2021-08-27 | 得克萨斯系统大学董事会 | 手术设备 |
| CN108698239B (zh) * | 2016-02-25 | 2021-06-01 | 奥林巴斯株式会社 | 操纵器系统及其控制方法 |
| JP6718255B2 (ja) * | 2016-02-26 | 2020-07-08 | 富士フイルム株式会社 | 内視鏡 |
| CN108066008B (zh) * | 2017-03-23 | 2020-05-29 | 深圳市罗伯医疗科技有限公司 | 辅助手术的医疗仪器控制方法及系统 |
| WO2018216126A1 (ja) * | 2017-05-24 | 2018-11-29 | オリンパス株式会社 | 医療用処置具先端マークおよび医療用処置具 |
| DE112018006968T5 (de) * | 2018-01-29 | 2020-10-08 | Fujifilm Corporation | Endoskop |
| EP3813632A4 (en) * | 2018-06-27 | 2022-03-09 | Auris Health, Inc. | ALIGNMENT AND MOUNTING SYSTEMS FOR MEDICAL INSTRUMENTS |
| WO2020148823A1 (ja) * | 2019-01-16 | 2020-07-23 | オリンパス株式会社 | 内視鏡先端部、および内視鏡 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06209999A (ja) * | 1993-01-14 | 1994-08-02 | Olympus Optical Co Ltd | 挿入チュ―ブ |
| JP3250759B2 (ja) * | 1993-04-02 | 2002-01-28 | オリンパス光学工業株式会社 | 可撓性管状挿入具の湾曲装置 |
| JP3269703B2 (ja) | 1993-06-21 | 2002-04-02 | オリンパス光学工業株式会社 | 処置具の駆動機構 |
| JPH0759730A (ja) | 1993-08-25 | 1995-03-07 | Olympus Optical Co Ltd | 内視鏡カバー方式の内視鏡 |
| JPH08224241A (ja) | 1995-02-22 | 1996-09-03 | Olympus Optical Co Ltd | 医療用マニピュレータ |
| JP3810177B2 (ja) * | 1997-03-25 | 2006-08-16 | オリンパス株式会社 | 内視鏡システム |
| US7766894B2 (en) * | 2001-02-15 | 2010-08-03 | Hansen Medical, Inc. | Coaxial catheter system |
| JP2002238844A (ja) * | 2001-02-16 | 2002-08-27 | Olympus Optical Co Ltd | 内視鏡装置 |
| JP4668474B2 (ja) * | 2001-08-01 | 2011-04-13 | Hoya株式会社 | 電子内視鏡システム |
| JP4231660B2 (ja) | 2002-05-23 | 2009-03-04 | オリンパス株式会社 | 内視鏡 |
| JP2004180830A (ja) | 2002-12-02 | 2004-07-02 | Machida Endscope Co Ltd | 内視鏡装置およびその子内視鏡またはカテーテル |
| JP2006280602A (ja) * | 2005-03-31 | 2006-10-19 | Olympus Medical Systems Corp | 内視鏡 |
| JP5121132B2 (ja) * | 2005-11-02 | 2013-01-16 | オリンパスメディカルシステムズ株式会社 | 内視鏡システム、及び内視鏡用操作補助装置 |
| US7524284B2 (en) * | 2006-02-06 | 2009-04-28 | Olympus Medical Systems Corp. | Endoscopy system |
-
2007
- 2007-10-25 JP JP2007277901A patent/JP5237608B2/ja not_active Expired - Fee Related
-
2008
- 2008-10-22 CN CN2008101706219A patent/CN101416866B/zh active Active
- 2008-10-22 EP EP08018480A patent/EP2052671B1/en active Active
- 2008-10-24 US US12/257,924 patent/US8187169B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101416866A (zh) | 2009-04-29 |
| CN101416866B (zh) | 2012-10-03 |
| EP2052671A3 (en) | 2010-04-28 |
| US8187169B2 (en) | 2012-05-29 |
| US20090112060A1 (en) | 2009-04-30 |
| EP2052671A2 (en) | 2009-04-29 |
| EP2052671B1 (en) | 2011-07-27 |
| JP2009101077A (ja) | 2009-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5237608B2 (ja) | 医療装置 | |
| JP5307420B2 (ja) | 処置システム | |
| JP5301867B2 (ja) | 医療用マニピュレータシステム | |
| EP2113187B1 (en) | Endoscope system using manipulator apparatus | |
| EP1582141B1 (en) | Balloon control apparatus | |
| EP2092874B1 (en) | Manipulator operation system | |
| JP5559996B2 (ja) | 内視鏡装置及び内視鏡システム並びに内視鏡装置の作動方法 | |
| US20090143642A1 (en) | Therapeutic device system and manipulator system | |
| WO2005122865A1 (ja) | 内視鏡及び内視鏡用湾曲操作補助部材 | |
| US20070078301A1 (en) | Endoscope system comprising endoscope to which medical instrument is attached | |
| JP6072283B2 (ja) | 医療用マニピュレータおよび医療用マニピュレータの作動方法 | |
| JPWO2006134881A1 (ja) | 内視鏡処置具及び内視鏡用処置具装置 | |
| JP2010022762A (ja) | 内視鏡処置システム | |
| JP2001095747A (ja) | 電子内視鏡 | |
| JP2008245840A (ja) | 内視鏡装置 | |
| JP5959722B2 (ja) | 処置具交換装置及び医療システム | |
| JP2020151201A (ja) | 内視鏡 | |
| JPH06285009A (ja) | 可撓性管状挿入具の湾曲装置 | |
| US20210338355A1 (en) | Handheld flexible robotic catheter for endoscopic instrumentation | |
| KR100881811B1 (ko) | 내시경, 내시경용 만곡 조작 보조 부재 및 1세트의 만곡 조작 노브 | |
| JP5396178B2 (ja) | 内視鏡装置及び内視鏡システム | |
| WO2014136470A1 (ja) | 内視鏡 | |
| JP3722732B2 (ja) | 内視鏡 | |
| US20230148849A1 (en) | Medical system and cannulation method | |
| KR102275597B1 (ko) | 귀 내시경용 고정지그 및 이를 포함하는 귀 내시경 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20091117 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120113 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120321 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130329 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5237608 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160405 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313111 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |