JP5156844B2 - 真空パッド装置 - Google Patents
真空パッド装置 Download PDFInfo
- Publication number
- JP5156844B2 JP5156844B2 JP2010549584A JP2010549584A JP5156844B2 JP 5156844 B2 JP5156844 B2 JP 5156844B2 JP 2010549584 A JP2010549584 A JP 2010549584A JP 2010549584 A JP2010549584 A JP 2010549584A JP 5156844 B2 JP5156844 B2 JP 5156844B2
- Authority
- JP
- Japan
- Prior art keywords
- piston
- hole
- ball joint
- housing
- ball
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000009434 installation Methods 0.000 claims description 7
- 238000007789 sealing Methods 0.000 claims description 3
- 238000000034 method Methods 0.000 description 5
- 239000004071 soot Substances 0.000 description 2
- 239000006096 absorbing agent Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000003584 silencer Effects 0.000 description 1
- 238000001179 sorption measurement Methods 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B11/00—Work holders not covered by any preceding group in the subclass, e.g. magnetic work holders, vacuum work holders
- B25B11/005—Vacuum work holders
- B25B11/007—Vacuum work holders portable, e.g. handheld
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/06—Gripping heads and other end effectors with vacuum or magnetic holding means
- B25J15/0616—Gripping heads and other end effectors with vacuum or magnetic holding means with vacuum
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0258—Two-dimensional joints
- B25J17/0275—Universal joints, e.g. Hooke, Cardan, ball joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/91—Devices for picking-up and depositing articles or materials incorporating pneumatic, e.g. suction, grippers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16C—SHAFTS; FLEXIBLE SHAFTS; ELEMENTS OR CRANKSHAFT MECHANISMS; ROTARY BODIES OTHER THAN GEARING ELEMENTS; BEARINGS
- F16C11/00—Pivots; Pivotal connections
- F16C11/04—Pivotal connections
- F16C11/06—Ball-joints; Other joints having more than one degree of angular freedom, i.e. universal joints
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D3/00—Yielding couplings, i.e. with means permitting movement between the connected parts during the drive
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16B—DEVICES FOR FASTENING OR SECURING CONSTRUCTIONAL ELEMENTS OR MACHINE PARTS TOGETHER, e.g. NAILS, BOLTS, CIRCLIPS, CLAMPS, CLIPS OR WEDGES; JOINTS OR JOINTING
- F16B47/00—Suction cups for attaching purposes; Equivalent means using adhesives
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Hooks, Suction Cups, And Attachment By Adhesive Means (AREA)
- Warehouses Or Storage Devices (AREA)
- Compressors, Vaccum Pumps And Other Relevant Systems (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Description
(1)吸着パッドが自由に回動できるようにし、
(2)吸着後の移送のために、対象物を持ち上げているうちにも回動角がそのまま維持されるようにし、
(3)対象物の正確でかつより安全な移送が可能になるようにした、
真空パッド装置を提供することにある。
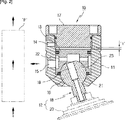
12:パッド部 13:ピストン
14:流入ポート 15:排出ポート
16:装着孔 17:カバー
18:ボールジョイント 19:貫通孔
20:吸着パッド 21:ボール部
22:連結孔 31:真空ポンプ
32:空気流入口 33:空気排出口
34:通孔 38:ピン
Claims (5)
- 側壁に上下位置に形成された流入ポート及び排出ポート、下部に形成された装着孔、及び上側に提供される密閉用カバーを含むハウジングと、
長手方向に貫通孔が形成されたボールジョイントと、前記ボールジョイントの端部に結合される吸着パッドとを含み、前記ボールジョイントのボール部がハウジングの下部装着孔内に装着されて回動可能に結合されるパッド部と、
前記排出ポートと貫通孔を連通するように形成された連結孔を含み、前記ハウジングの内壁に密着配置され、前記流入ポートに供給された圧縮空気の圧力によって遊動してボールジョイントの回動を制御するピストンと、
一側が空気流入口、他側が空気排出口であり、表面に外部空間と連通する通孔が形成された回転対称形エアポンプであり、前記排出ポートの反対側に設置孔を形成し、排出ポートと設置孔に空気排出口側及び空気流入口側がそれぞれ挿合する方法で前記ハウジングに装着され、真空ポンプの通孔はピストンの連結孔と連通する真空ポンプと、
を含むことを特徴とする、真空パッド装置。 - 前記装着孔は、前記ボールジョイントのボール部と面接触する曲面を持つことを特徴とする、請求項1に記載の真空パッド装置。
- 前記ピストンは前記流入ポートに供給された圧縮空気の圧力によって遊動してボールジョイントのボール部を加圧することにより、ボールジョイントの回動を制御することを特徴とする、請求項1または2に記載の真空パッド装置。
- 前記ピストンは前記ボールジョイントのボールと面接触する曲面孔を持つことを特徴とする、請求項3に記載の真空パッド装置。
- 前記ピストンの回転を防止するために、ピストンとカバーの間にピンが設置され、前記ピンとピストンの間には僅かの遊隙があるので、ピストンの遊動に邪魔とならないことを特徴とする、請求項1または2に記載の真空パッド装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020080024327A KR100889638B1 (ko) | 2008-03-17 | 2008-03-17 | 진공 패드장치 |
| KR10-2008-0024327 | 2008-03-17 | ||
| PCT/KR2009/001288 WO2009116761A2 (ko) | 2008-03-17 | 2009-03-16 | 진공 패드장치 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011513669A JP2011513669A (ja) | 2011-04-28 |
| JP5156844B2 true JP5156844B2 (ja) | 2013-03-06 |
Family
ID=40698496
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010549584A Active JP5156844B2 (ja) | 2008-03-17 | 2009-03-16 | 真空パッド装置 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US8267367B2 (ja) |
| EP (1) | EP2261520B1 (ja) |
| JP (1) | JP5156844B2 (ja) |
| KR (1) | KR100889638B1 (ja) |
| CN (1) | CN101978179B (ja) |
| AU (1) | AU2009226307B2 (ja) |
| BR (1) | BRPI0906194A2 (ja) |
| MY (1) | MY145208A (ja) |
| WO (1) | WO2009116761A2 (ja) |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100926534B1 (ko) | 2009-07-02 | 2009-11-12 | 한국뉴매틱(주) | 각변위 가능한 진공-그리퍼 장치 |
| KR101029967B1 (ko) * | 2011-01-03 | 2011-04-19 | 한국뉴매틱(주) | 퀵-릴리즈 진공펌프 |
| KR101066212B1 (ko) * | 2011-03-10 | 2011-09-20 | 한국뉴매틱(주) | 퀵-릴리즈 진공펌프 |
| DE102011076857A1 (de) * | 2011-06-01 | 2012-12-06 | Robert Bosch Gmbh | Übergabevorrichtung für Bauteile |
| KR101931340B1 (ko) * | 2012-06-25 | 2018-12-20 | 엘지디스플레이 주식회사 | 유연한 표시장치의 제조장치 및 이의 구동방법 |
| US9196521B2 (en) | 2012-11-05 | 2015-11-24 | Infineon Technologies Ag | Adjustable pick-up head and method for manufacturing a device |
| US9079318B2 (en) * | 2012-12-20 | 2015-07-14 | Infineon Technologies Ag | Self-aligning pick-up head and method for manufacturing a device with the self-aligning pick-up head |
| US10093745B2 (en) | 2013-05-29 | 2018-10-09 | The Regents Of The University Of California | Anti-CSPG4 fusions with interferon for the treatment of malignancy |
| ITMO20130231A1 (it) * | 2013-08-06 | 2015-02-07 | Cms Spa | Attrezzatura per tenere un pezzo |
| CN104440898A (zh) * | 2013-09-13 | 2015-03-25 | 范克健 | 高速上下料智能机器人 |
| DE102013222376B3 (de) * | 2013-11-04 | 2015-03-26 | J. Schmalz Gmbh | Ventil für Unterdruckhandhabungs- oderSpanneinrichtung, sowie Unterdruckhandhabungseinrichtung |
| KR101472503B1 (ko) * | 2014-04-24 | 2014-12-12 | 한국뉴매틱(주) | 이젝터 어셈블리 및 진공펌프 |
| US9962834B2 (en) * | 2015-06-17 | 2018-05-08 | The Boeing Company | Compliant end effectors, robots that include compliant end effectors, and methods of utilizing the same |
| JP6654401B2 (ja) * | 2015-10-29 | 2020-02-26 | 株式会社 栄組 | 壁の亀裂補修装置 |
| CN106938466A (zh) * | 2017-05-02 | 2017-07-11 | 淮安信息职业技术学院 | 一种用于抓取盘类零件的机械手 |
| JP6609293B2 (ja) * | 2017-08-30 | 2019-11-20 | 平田機工株式会社 | 保持ノズル、保持ヘッド及び移載装置 |
| KR102399980B1 (ko) * | 2017-11-22 | 2022-05-20 | 대우조선해양 주식회사 | 회전 및 탈부착이 가능한 고박 장치 |
| KR102581315B1 (ko) * | 2017-11-22 | 2023-09-22 | 도쿄엘렉트론가부시키가이샤 | 기판 반송 장치, 기판 처리 시스템, 기판 처리 방법 및 컴퓨터 기억 매체 |
| CN109751325A (zh) * | 2018-01-08 | 2019-05-14 | 刘禄军 | 一种防液体的吸盘 |
| JP7173699B2 (ja) * | 2019-01-15 | 2022-11-16 | ダブル技研株式会社 | ロック機構付きロボットハンド |
| US11117268B2 (en) * | 2019-06-26 | 2021-09-14 | Timothy R. Beevers | Robot appendage |
| KR102263415B1 (ko) * | 2019-10-25 | 2021-06-10 | 최길웅 | 흡착대상물의 무동력 방향전환이 가능한 진공흡착장치 |
| CN113276155A (zh) * | 2021-04-22 | 2021-08-20 | 上海扩博智能技术有限公司 | 吸附装置及用于贴板材的机器人 |
| US20230182323A1 (en) * | 2021-12-13 | 2023-06-15 | Raytheon Company | Flexible vacuum assembly fixture |
| CN114321536A (zh) * | 2022-01-11 | 2022-04-12 | 苏州天准科技股份有限公司 | 一种旋转供气装置和采用该供气装置的载物设备 |
| WO2024138539A1 (zh) * | 2022-12-29 | 2024-07-04 | 广东安达智能装备股份有限公司 | 一种角度可调节的功能头及智能平台系统 |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2200800A (en) * | 1939-09-28 | 1940-05-14 | F J Littel Machine Co | Plate lifter |
| US3152828A (en) * | 1962-02-02 | 1964-10-13 | Alvey Conveyor Mfg Co | Vacuum cup units for lifting pads |
| GB1068514A (en) * | 1963-05-03 | 1967-05-10 | Headley Townsend Backhouse | Improvements in or relating to suction grippers |
| US3272549A (en) * | 1965-01-13 | 1966-09-13 | Gen Electric | Materials handling device |
| US3568959A (en) * | 1969-04-09 | 1971-03-09 | Leland F Blaff | Vacuum cup type work gripping means |
| US3613904A (en) * | 1969-09-12 | 1971-10-19 | Leland F Blatt | Vacuum holder and control assembly |
| US3967849A (en) * | 1973-06-14 | 1976-07-06 | Sahlin International, Inc. | Vacuum control system |
| US4600228A (en) * | 1984-05-31 | 1986-07-15 | Sperry Corporation | Lockable compliant end effector apparatus |
| US4747634A (en) * | 1986-12-18 | 1988-05-31 | Hoke Thomas A | Apparatus for suspending a lifting pad |
| US4957318A (en) * | 1988-03-07 | 1990-09-18 | John A. Blatt | Vacuum cup assembly |
| US5029383A (en) * | 1990-06-07 | 1991-07-09 | Universal Instruments Corporation | Articulating tip for pick and place head |
| JPH07214488A (ja) | 1994-02-01 | 1995-08-15 | Tokyo Gas Co Ltd | 真空吸盤装置 |
| JP2972980B2 (ja) | 1994-10-28 | 1999-11-08 | 株式会社トーカイデザイン | 回転止め付き真空吸着盤 |
| JPH08197470A (ja) | 1995-01-18 | 1996-08-06 | Toyota Auto Body Co Ltd | 真空吸着カップ |
| JP2882762B2 (ja) * | 1995-03-25 | 1999-04-12 | 株式会社ナブコ | 負圧式倍力装置 |
| US5544968A (en) * | 1995-06-02 | 1996-08-13 | Advanced Machine & Engineering Co. | Lockable ball joint apparatus |
| US6024392A (en) * | 1996-01-23 | 2000-02-15 | Isi Norgren, Inc. | Vacuum cup actuator |
| US6213521B1 (en) * | 1996-10-08 | 2001-04-10 | Syron Engineering & Manufacturing Corporation | Quick release and bayonet connector for a suction cup |
| JPH10249770A (ja) | 1997-03-12 | 1998-09-22 | Aida Eng Ltd | バキュームカップ |
| DE19817426B4 (de) * | 1998-04-18 | 2004-06-09 | J. Schmalz Gmbh | Greifersystem, insbesondere Vakuumgreifersystem |
| CN2399120Y (zh) * | 1999-11-18 | 2000-10-04 | 叶传杰 | 高层建筑幕墙自动清洗机 |
| FR2804892B1 (fr) * | 2000-02-11 | 2002-04-26 | Aerospatiale Matra Airbus | Organe de prehension orientable pour le transport ou l'usinage d'une piece de forme quelconque |
| JP4095978B2 (ja) * | 2001-02-07 | 2008-06-04 | 日産自動車株式会社 | 吸着保持装置 |
| JP4106450B2 (ja) * | 2001-02-07 | 2008-06-25 | 日産自動車株式会社 | 吸着保持装置 |
| JP3087910U (ja) * | 2002-02-12 | 2002-08-23 | エスエムシー株式会社 | ロック保持機構 |
| ATE420751T1 (de) * | 2003-11-21 | 2009-01-15 | Mitsuboshi Diamond Ind Co Ltd | Vakuumsaugkopf und vakuumsaugvorrichtung und tisch, der diese/n verwendet |
| US7281739B2 (en) * | 2004-09-01 | 2007-10-16 | Delaware Capital Formation, Inc. | Adjustable mount for vacuum cup with offset mounting post and swivel |
| JP5287741B2 (ja) * | 2010-01-21 | 2013-09-11 | 富士通株式会社 | 部品のマウンタ装置及び部品のマウント方法 |
-
2008
- 2008-03-17 KR KR1020080024327A patent/KR100889638B1/ko active IP Right Grant
-
2009
- 2009-03-16 US US12/736,125 patent/US8267367B2/en not_active Expired - Fee Related
- 2009-03-16 EP EP09722946.2A patent/EP2261520B1/en active Active
- 2009-03-16 BR BRPI0906194A patent/BRPI0906194A2/pt active IP Right Grant
- 2009-03-16 CN CN2009801097232A patent/CN101978179B/zh active Active
- 2009-03-16 MY MYPI2010004267A patent/MY145208A/en unknown
- 2009-03-16 WO PCT/KR2009/001288 patent/WO2009116761A2/ko active Application Filing
- 2009-03-16 JP JP2010549584A patent/JP5156844B2/ja active Active
- 2009-03-16 AU AU2009226307A patent/AU2009226307B2/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN101978179B (zh) | 2012-09-05 |
| US8267367B2 (en) | 2012-09-18 |
| EP2261520A2 (en) | 2010-12-15 |
| CN101978179A (zh) | 2011-02-16 |
| MY145208A (en) | 2012-01-13 |
| JP2011513669A (ja) | 2011-04-28 |
| EP2261520B1 (en) | 2014-02-26 |
| KR100889638B1 (ko) | 2009-03-20 |
| EP2261520A4 (en) | 2012-11-21 |
| AU2009226307A1 (en) | 2009-09-24 |
| WO2009116761A2 (ko) | 2009-09-24 |
| AU2009226307B2 (en) | 2011-04-07 |
| US20110001024A1 (en) | 2011-01-06 |
| BRPI0906194A2 (pt) | 2017-06-20 |
| WO2009116761A3 (ko) | 2009-12-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5156844B2 (ja) | 真空パッド装置 | |
| JP5733649B2 (ja) | クイックリリース真空ポンプ | |
| JP4336732B1 (ja) | 超音波実装装置 | |
| JP2014509955A (ja) | 真空グリッパー装置 | |
| JP2002542101A5 (ja) | ||
| JP4903701B2 (ja) | 対象物を洗浄するための簡単な装置 | |
| JP2010099780A (ja) | 電動保持装置 | |
| JP2001105826A (ja) | レベリングバルブ操作装置 | |
| KR100881087B1 (ko) | 차량 자세 안정화 장치 | |
| JP4863205B2 (ja) | 表面に負圧吸着して移動可能な装置 | |
| KR20170091373A (ko) | 휴대용 볼 밸브의 토크 측정 장치 | |
| CN110630793B (zh) | 一种高压气体流动用控量装置 | |
| EP1671879A3 (en) | Device pertaining to a telescopic leg for a motor cycle | |
| JP4079511B2 (ja) | 部品実装装置 | |
| WO2018014208A1 (zh) | 一种结构简单的制动卡钳 | |
| US6254463B1 (en) | Chemical planar head dampening system | |
| JP2005220812A (ja) | ポンプ内蔵モータ | |
| DK200401930A (da) | Fyldehoved til overforsel af gas eller vaske til lukkede kredslob | |
| JP2002307368A (ja) | 部品吸着装置 | |
| JP2006021219A (ja) | クランプ装置 | |
| JP2005329525A (ja) | 旋回式クランプ | |
| JP4095970B2 (ja) | 低騒音液圧ポンプ | |
| JP4574397B2 (ja) | 粉体塗装装置 | |
| JP4150184B2 (ja) | 緩衝装置及びストッパ装置 | |
| TWI830899B (zh) | 靠模裝置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110802 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120719 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120724 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121012 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121113 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121210 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151214 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5156844 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |