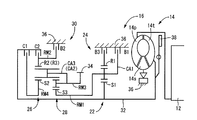
図1は、本発明の一実施例である変速制御装置が適用される車両の駆動力伝達装置10を説明する図である。この車両用動力伝達装置10は横置き型自動変速機16を有するものであって、FF(フロントエンジン・フロントドライブ)型車両に好適に採用されるものであり、走行用の駆動力源としてエンジン12を備えている。内燃機関にて構成されるエンジン12の出力は、トルクコンバータ14、自動変速機16、図示しない差動歯車装置、一対の車軸などを介して左右の駆動輪へ伝達されるようになっている。
上記トルクコンバータ14は、エンジン12のクランク軸に連結されたポンプ翼車14p、自動変速機16の入力軸32に連結されたタービン翼車14t、および一方向クラッチを介して変速機ケース36に連結された固定翼車14sを備えており、流体を介して動力伝達を行うようになっている。また、それ等のポンプ翼車14pおよびタービン翼車14tの間にはロックアップクラッチ38が設けられており、図示しない油圧制御回路の切換弁によって係合側油室および解放側油室に対する油圧供給が切り換えられることにより、係合状態、スリップ状態、或いは解放状態されるようになっており、完全係合状態とされることによってポンプ翼車14pおよびタービン翼車14tが一体回転させられるようになっている。
上記自動変速機16は、シングルピニオン型の第1遊星歯車装置22を主体として構成されている第1変速部24と、シングルピニオン型の第2遊星歯車装置26およびダブルピニオン型の第3遊星歯車装置28を主体として構成されている第2変速部30とを同軸線上に有し、入力軸32の回転を変速して出力歯車34から出力する。入力軸32は入力部材に相当するもので、エンジン等の走行用駆動源によって回転駆動されるトルクコンバータのタービン軸などであり、出力歯車34は出力部材に相当するものであり、カウンタ軸を介して或いは直接的に差動歯車装置と噛み合い、左右の駆動輪を回転駆動する。なお、この車両用自動変速機16は中心線に対して略対称的に構成されており、図1では中心線の下半分が省略されている。
上記第1変速部24を構成している第1遊星歯車装置22は、サンギヤS1、キャリアCA1、およびリングギヤR1の3つの回転要素を備えており、サンギヤS1が入力軸32に連結されて回転駆動されるとともにリングギヤR1が第3ブレーキB3を介して回転不能に変速機ケース(ハウジング)36に固定されることにより、キャリヤCA1が中間出力部材として入力軸32に対して減速回転させられて出力する。また、第2変速部30を構成している第2遊星歯車装置26および第3遊星歯車装置28は、一部が互いに連結されることによって4つの回転要素RM1〜RM4が構成されており、具体的には、第3遊星歯車装置28のサンギヤS3によって第1回転要素RM1が構成され、第2遊星歯車装置26のリングギヤR2および第3遊星歯車装置28のリングギヤR3が互いに連結されて第2回転要素RM2が構成され、第2遊星歯車装置26のキャリアCA2および第3遊星歯車装置28のキャリアCA3が互いに連結されて第3回転要素RM3が構成され、第2遊星歯車装置26のサンギヤS2によって第4回転要素RM4が構成されている。上記第2遊星歯車装置26および第3遊星歯車装置28は、キャリアCA2およびCA3が共通の部材にて構成されているとともに、リングギヤR2およびR3が共通の部材にて構成されており、且つ第2遊星歯車装置26のピニオンギヤが第3遊星歯車装置28の第2ピニオンギヤを兼ねているラビニヨ型の遊星歯車列とされている。
上記第1回転要素RM1(サンギヤS3)は第1ブレーキB1によって選択的にケース36に連結されて回転停止させられ、第2回転要素RM2(リングギヤR2、R3)は第2ブレーキB2によって選択的にケース36に連結されて回転停止させられ、第4回転要素RM4(サンギヤS2)は第1クラッチC1を介して選択的に前記入力軸32に連結され、第2回転要素RM2(リングギヤR2、R3)は第2クラッチC2を介して選択的に入力軸32に連結され、第1回転要素RM1(サンギヤS3)は中間出力部材である第1遊星歯車装置22のキャリアCA1に一体的に連結され、第3回転要素RM3(キャリアCA2、CA3)は前記出力歯車34に一体的に連結されて回転を出力するようになっている。第1ブレーキB1〜第3ブレーキB3、第1クラッチC1、第2クラッチC2は、何れも油圧シリンダによって摩擦係合させられる多板式の油圧式摩擦係合装置である。
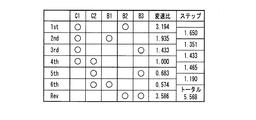
図2の作動表は、上記各変速段とクラッチC1、C2、ブレーキB1〜B3の作動状態との関係をまとめたもので、「○」は係合、「◎」はエンジンブレーキ時のみ係合を表している。各変速段の変速比は、第1遊星歯車装置22、第2遊星歯車装置26、および第3遊星歯車装置28の各ギヤ比ρ1、ρ2、ρ3によって適宜定められ、例えばρ1≒0.45、ρ2≒0.38、ρ3≒0.41とすれば、図2に示す変速比が得られ、ギヤ比ステップ(各変速段間の変速比の比)の値が略適切であるとともにトータルの変速比幅(=3.62/0.59)も6.1程度と大きく、後進変速段「Rev」の変速比も適当で、全体として適切な変速比特性が得られる。このように、本実施例の車両用自動変速機16においては、3組の遊星歯車装置22、26、28と2つのクラッチC1、C2および3つのブレーキB1〜B3を用いて前進6段の多段変速が達成されるため、3つのクラッチおよび2つのブレーキを用いる場合に比較して、クラッチが少なくなった分だけ重量やコスト、軸長が低減される。特に、第2変速部30を構成しているシングルピニオン型の第2遊星歯車装置26およびダブルピニオン型の第3遊星歯車装置28はラビニヨ型の遊星歯車列とされているため、部品点数や軸長が一層低減される。
図3は、上記自動変速機16の変速を制御するための自動変速制御装置として機能する電子制御装置40の入出力を示す図である。図3において、イグニションスイッチからのスイッチオン信号、エンジン回転センサからのエンジン回転速度NEを示す信号、エンジン水温センサからのエンジン水温Twを示す信号、エンジン吸気温度センサからのエンジン吸気温度Taを示す信号、スロットル開度センサからのスロットル開度θthを示す信号、アクセル開度センサからのアクセル開度θaccを示す信号、ブレーキスイッチからのブレーキ操作を示す信号、車速センサからの車速Vを示す信号、シフトレバー位置センサからのシフトレバーの前後位置を示す信号、シフトレバー位置センサからのシフトレバーの左右位置を示す信号、タービン回転センサからのタービン翼車14tの回転速度Ntを示す信号、自動変速機16の出力歯車(出力軸)の回転速度Noutを示す信号、自動変速機16の油温Toilを示す信号、変速パターン切換スイッチの操作位置を示す信号、ABS用電子制御装置からの信号、VSC/TRCの用電子制御装置からの信号、A/C用電子制御装置からの信号などが電子制御装置40に入力される。
上記電子制御装置40は、たとえばCPU、ROM、RAM、インターフェースなどを含む所謂マイクロコンピュータであって、予めROMに記憶されたプログラムに従って入力信号を処理し、スタータへの駆動信号、燃料噴射弁への燃料噴射信号、自動変速機16の変速制御用オンオフ弁のソレノイドへの信号、自動変速機16の油圧制御用リニヤソレノイド弁のソレノイドへの信号、シフトポジション表示器への表示信号、ABS用電子制御装置への信号、VSC/TRC用電子制御装置への信号、A/C用電子制御装置への信号などをそれぞれ出力する。
上記電子制御装置40は、たとえば、たとえば図4に一部を示す予め記憶された変速線図から実際の車速Vとアクセル開度θaccまたはスロットル開度θthとに基づいて変速判断し、判断された変速を実行させるための変速制御用オンオフ弁を駆動するための変速出力を行う。たとえば図4の1→2変速線の最大アクセル開度θaccmax側は、平坦値走行においてアクセル開度θaccまたはスロットル開度θthが100%またはその付近である全開スロットル時のアップ変速である全開アップ変速に際しては、車両の最大駆動力(出力)が得られるように設定されている。また、電子制御装置40は、たとえば登坂路走行、降坂走行、牽引走行などの走行抵抗が大きく変化した走行状態における全開アップ変速に際しても、車両の最大駆動力(出力)を得るため、エンジン回転速度NEが予め設定されたレッドゾーン域またはその上に設定された燃料遮断域内に入らない範囲で高い回転速度となるように、最適な時期に変速出力を行うか、或いは予め設定された変速線(変速パターン)を変更し、以後の全開アップ変速において最適な時期に変速出力が行われるようする。すなわち、実行された変速の結果に基づいて、最適な変速出力の時期を学習制御する。
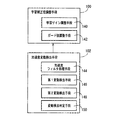
図5は、上記電子制御装置40の制御機能の要部を説明する機能ブロック線図である。図5において、電子制御装置40は、その機能面から、変速制御手段50、変速点リアルタイム修正手段60のほか、変速点補正手段70などに分けられる。変速制御手段50は、変速線図を予め記憶する変速線図記憶手段52と、その変速線図記憶手段52に記憶された変速線図から車両走行状態たとえば実際の車速Vとアクセル開度θaccまたはスロットル開度θthとに基づいて変速判断する変速判断手段54とを備え、その判断された変速を実行させるための変速制御用オンオフ弁を駆動するための変速出力を行う。また、前記変速線図記憶手段52は、後述する変速点補正手段70の出力に応じ、予め記憶する変速線図を適宜補正し得るものであり、前記変速判断手段54は、後述する変速点修正実行手段94により修正された変速点を考慮した変速出力を行い得るものである。
変速点補正手段70は、基準エンジン回転加速度算出手段74、エンジン回転加速度算出手段76、推定最大エンジン回転速度算出手段72、加速度変動検出手段102、学習補正値調整手段100、補正値制限手段82、学習補正値算出手段80などを備え、これらの手段により、実際の走行における変速により学習を行い、その結果に応じて前記変速線図記憶手段52に記憶された変速線図を補正する。すなわち、学習制御手段70は、パワーオン走行時でのアップ変速出力後のエンジン回転速度の最大値を、車両の加速度に影響しない基準走行状態における値に置換した推定最大エンジン回転速度を推定し、該推定最大エンジン回転速度と前記目標最大エンジン回転速度との偏差に基づいて前記学習補正値を算出する。
基準エンジン回転加速度算出手段74は、予め実験的に求められ且つ記憶された関係から、車両の走行状態たとえば車速V、スロットル開度θth、自動変速機16の入力トルクTinの少なくとも1つに基づいて、基準走行状態におけるアップ変速判断時点のエンジン回転加速度である、基準エンジン回転加速度A2(rad/sec2 )の値が算出される。ここで、基準エンジン回転加速度とは、車両の加速度に影響を及ぼさない基準走行状態、たとえば、所定重量の運転手のみが乗車した状態などの予め定められた車両の基準人数乗車状態であって0%の勾配の路面を車両が走行している状態におけるエンジン12の回転加速度であって、本実施例においては、上記アップ変速判断時点の走行状態から算出される基準走行状態におけるエンジン回転加速度A2である。
エンジン回転加速度算出手段76は、アップ変速判断時点における、エンジン12の回転加速度A(rad/sec2 )を算出する。本実施例においては、エンジン回転加速度Aの値はエンジン12に設けられたエンジン回転速度センサ46によって検出されたエンジン回転速度NEの微小単位時間あたりの変化量dNE/dtを逐次算出することによって得られる。なお、通常、エンジン回転速度NEは変動(ノイズ)が大きいので、この際、図示しない平滑化フィルタなどにより、その移動平均などのフィルタ処理がされた後のエンジン回転速度NEが用いられる。
推定最大エンジン回転速度算出手段72は、前記基準エンジン回転加速度算出手段74によって算出された基準エンジン回転加速度A2における推定最大エンジン回転速度NEcを算出する。具体的には、推定最大エンジン回転速度算出手段72は、前記基準エンジン回転加速度算出手段74によって算出された基準エンジン回転加速度A2および、前記エンジン回転加速度算出手段76によって算出されたアップ変速出力時点のエンジン回転加速度A、エンジン回転速度センサ46により検出されたアップ変速出力時点におけるエンジン12の回転速度NE1、および前記アップ変速実行中のイナーシャ相開始時点におけるエンジン12の回転速度NE2から、次の式(1)により求められる。
NEc=NE1+(NE2−NE1)×A2/A ・・・(1)
補正値制限手段82は、後述する学習補正値算出手段80の実行中に適宜実行されるものであって、学習補正値算出手段80において用いられる1回あたりの変速点学習値ΔG、および/または、学習後の全体学習量G(N)の値が、予め定められた範囲を超えていないかが判定され、前記範囲を超えている場合には、それらの値を前記範囲を満たすような制限を加える。例えば、前記ΔGについて考えると、後述する学習補正値算出手段80において算出される1回あたりの変速点学習値ΔGは、算出された後、実際の学習に用いられる前に本補正値制限手段82に渡される。そして、ΔGが、予め定められた2つの定数ΔGmin、ΔGmaxによって、ΔGmin≦ΔG≦ΔGmaxのように定められた前記範囲を超えているか否かを判定し、ΔGが前記範囲の上限ΔGmaxを上回っている場合にはΔG=ΔGmaxとし、ΔGが前記範囲の下限ΔGminを下回っている場合にはΔG=ΔGminとする、いわゆるガード処理を行う。一方、ΔGが前記範囲を満たす場合には、特別な処理を行わない。以上の処理が行われたΔGが学習補正値算出手段80に戻され、実際の学習が行われることとなる。また、学習後の全体学習量G(N)の場合は、後述する学習補正値算出手段80によって算出された全体学習量G(N)算出された後、変速点の補正に用いられる前に本補正値制限手段82に渡される。そして、G(N)が、予め定められた2つの定数Gmin、Gmaxによって、Gmin≦G(N)≦Gmaxのように定められた前記範囲を超えているか否かを判定し、G(N)が前記範囲の上限Gmaxを上回っている場合にはG(N)=Gmaxとし、G(N)が前記範囲の下限Gminを下回っている場合にはG(N)=Gminとする、ガード処理を行う。一方、G(N)が前記範囲を満たす場合には、特別な処理を行わない。以上の処理が行われたG(N)が学習値補正手段80に戻され、その後変速点の補正が行われる。
学習補正値算出手段80は、1回の変速が行われる毎に、前記推定最大エンジン回転速度算出手段72により算出された推定最大エンジン回転速度NEcと、目標最大エンジン回転速度NEdとの偏差ΔNE1を算出し、その偏差ΔNE1の大きさに応じた学習を行い、前記変速線図記憶手段52に記憶された変速点を補正する。ここで、目標最大エンジン回転速度NEdは、変速に伴うイナーシャ相の開始時点前後において、エンジン12の回転速度がその値を超えることがなく、かつできる限りその値に近づくように、予め設定された回転速度であり、たとえば、エンジン12の耐久性が損なわれないように設定されている燃料遮断回転速度NEfcutよりも低い側、好適にはそれよりも低く設定されているエンジン12のレッドゾーンの下限値NEredよりも所定値だけ低い側においてそれに近い値となるように設定されている。
具体的にはまず、前記算出された偏差ΔNE1に基づき、1回あたりの変速点学習値ΔG(=K×ΔNE1、但しKは学習の重みを決定する学習補正係数(「学習ゲイン」ともいう。)であって、予め与えられる。)を決定する。そして、このようにして算出され、必要に応じて前記補正値制限手段82によってガード処理のされたΔGを前回の変速時までの全体学習量G(N−1)に加える事により、今回の変速における学習を加えた全体学習量G(N)(=G(N−1)+ΔG)とする。そして、算出された全体学習量G(N)に対し、必要に応じて前記補正値制限手段82によってガード処理がされる。
また、学習補正値算出手段80は、算出され、必要に応じて前記補正値制限手段82によってガード処理がされた全体学習量G(N)に基づいて、変速線図記憶手段52に記憶された変速線図の補正を行う。すなわち、前記学習された全体学習量G(N)により、たとえば図4の変速線を実線から破線へ修正してアップ変速点たとえば1→2アップ変速点を学習によって補正し、これにより判断される全開アップ変速において登坂路走行、降坂走行、牽引走行などの走行抵抗が大きく変化した走行状態に拘わらず最大出力が得られるようにする。
このとき、変速点の補正は、前記推定最大エンジン回転速度NEcと前記目標最大エンジン回転速度NEdとの偏差ΔNE1が大きくなるほど、高車速側へ大きくずれるようにされる。すなわち、図4における補正は、ΔNE1が負の値となった場合であって、元の変速点から低車速側へ補正された場合を示している。また、学習に際し、学習補正値算出手段80に与えられるのはΔNE1、すなわちエンジン回転速度の偏差である一方、学習補正値算出手段80が実際に学習を行う値である1回あたりの学習量ΔG、および学習補正値算出手段80によって算出され、変速点の補正に用いられる値である全体学習量G(N)は図4に示されるように車速であるから、これらの次元は異なるものであるが、前記学習補正係数Kによって学習の重みの決定がされるのと同時に、あるいは特に示されない一般的な方法によって別途、変換されればよい。
加速度変動検出手段102は、車両の加速度a(m/sec2 )に変動が生じた場合にこれを検出する。また、学習補正値調整手段100は、前記加速度変動検出手段102において車両加速度aの変動が検出された場合において、学習補正値算出手段80に対し学習補正値算出手段80が算出する全体学習量G(N)の値が検出した車両加速度aの変動da/dtの大きさに応じて調整されるようにする。例えば前記車両加速度aの変動da/dtの値が大きくなるほど、前記学習補正係数Kや、前記ガード処理の際に用いられるガード値ΔGmax、ΔGminの大きさを小さくすることによって、前記車両加速度aの変動da/dtが大きい場合の学習結果の全体の学習結果に与える影響を小さくするとともに、かかる車両加速度aの変動da/dtが大きい場合であっても学習を中断することがない。なお、これらの詳細な作動については後述する。
変速点リアルタイム修正手段60は、前記基準エンジン回転加速度算出手段74、前記エンジン回転加速度算出手段76、加速度補正係数算出手段90、修正後エンジン回転速度算出手段92、修正値制限手段96、変速点修正実行手段94、修正実行禁止手段98等を備え、これらの手段により、変速点補正手段70により補正された変速点を、車両の加速度のばらつきに応じてリアルタイムで修正する。すなわち、変速点リアルタイム修正手段60は、パワーオン走行時でのアップ変速判断時点の実際のエンジン回転加速度と、その実際のエンジン回転加速度の値を車両の加速度に影響しない基準走行状態における値に置換した基準エンジン回転加速度との比の値と、前記目標エンジン回転速度とに基づいて前記変更された変速点をリアルタイムで修正する。なお、本実施例においてはエンジン回転加速度関連値としてはエンジン回転加速度が用いられる。
加速度補正係数算出手段90においては、前記エンジン回転加速度算出手段76において算出されたエンジン回転加速度Aの値と、前記基準エンジン回転加速度算出手段74によって算出された前記基準エンジン回転加速度A2の値の比である加速度補正係数γが算出される。
修正後エンジン回転速度算出手段92は、前記加速度補正係数算出手段90において算出された加速度補正係数γ及び、目標最大エンジン回転速度NEdと、前記変速点補正手段70において算出された補正後の変速点におけるエンジン回転速度である補正後エンジン回転速度NEoとの偏差ΔNE2(=NEd−NEo)に基づいて、予め記憶された関係式を用いて、修正後の変速点におけるエンジン回転速度である修正後エンジン回転速度NEnを算出する。ここで、目標最大エンジン回転速度NEdは、変速に伴うイナーシャ相の開始時点前後において、エンジン12の回転速度がその値を超えることがなく、かつできる限りその値に近づくように、予め設定された回転速度であり、たとえば、エンジン12の耐久性が損なわれないように設定されている燃料遮断回転速度NEfcutよりも低い側、好適にはそれよりも低く設定されているエンジン12のレッドゾーンの下限値NEredよりも所定値だけ低い側においてそれに近い値となるように設定されている。
ここで、前記修正後エンジン回転速度算出手段92に予め記憶された関係式とは、例えば、前記加速度補正係数γに、前記目標最大エンジン回転速度NEdと、前記補正後エンジン回転速度NEoに基づいて補正された変速点におけるエンジン回転速度NEoとの偏差ΔNE2を乗算し、該乗算の積を、前記目標最大エンジン回転速度NEdから減算するもの、すなわち、次式(2)
NEn=NEd−(NEd−NEo)×A/A2 ・・・(2)
である。
修正値制限手段96は、修正後エンジン回転速度算出手段92の実行に合わせて実行されるものであって、修正後エンジン回転速度算出手段92によって算出された修正後エンジン回転速度NEnの値が、予め定められた範囲を超えていないかが判定され、前記範囲を超えている場合には、それらの値が前記範囲を満たすような制限を加える。具体的には例えば、修正後エンジン回転速度算出手段92が修正後エンジン回転速度NEnの値を算出すると、そのNEnの値が修正値制限手段96に渡される。そして、修正値制限手段96は、前記NEnの値について、予め定められた2つの定数NEnmin、およびNEnmaxによってNEnmin≦NEn≦NEnmaxのように定められた前記範囲を超えているか否かを判定し、前記NEnが前記範囲の上限NEnmaxを上回っている場合には前記修正後エンジン回転速度NEnの値を新たに前記範囲の上限NEmaxとし(NEn=NEnmax)、前記NEnが前記範囲の下限NEnminを下回っている場合には前記修正後エンジン回転速度NEnの値を新たに前記範囲の下限NEminとする(NEn=NEnmin)、いわゆるガード処理を行う。一方、NEnが前記範囲を満たす場合には、特別な処理を行わない。以上の処理が行われたNEnが、以降、修正後エンジン回転速度NEnとして用いられる。
AT油温反映手段97は、修正後エンジン回転速度算出手段92の実行に合わせて実行されるものであって、修正後エンジン回転速度算出手段92によって算出された修正後エンジン回転速度NEnの値に対し、前記変速判断時点における自動変速機16の作動油の温度Toilによって変化する作動油の粘度等の影響を反映させる。具体的には、修正後エンジン回転速度NEnの値に、自動変速機16の作動油の温度Toil毎に予め定められた係数μを乗ずる。そして、この結果得られた数値NEn’(=NEn×μ)を、新たな修正後エンジン回転速度とする。尚、前記予め定められた係数μとは、例えば、自動変速機16の変速出力時からイナーシャ相開始時までに要する時間とその際の自動変速機16の作動油の油温Toilとの関係から実験的に得られた値である。
変速点修正実行手段94は、修正後エンジン回転速度算出手段92によって算出された修正後エンジン回転速度NEn’の値において変速出力が実行されるよう、前記変速判断手段54に変速点を修正させる。すなわち、エンジンの回転速度が修正後エンジン回転速度NEn’に達した時点において変速出力がなされるようにされる。
修正実行禁止手段98は、予め設定された変速点修正禁止条件に該当する場合には、前記変速点修正実行手段94による変速点の修正を禁止する。ここで、前記変速点修正禁止条件とは、例えば、アップ変速判断時が直前に行われたダウン変速から予め定められた一定期間tdが経過していないことや、例えば自動変速機16の出力軸回転数Noutの微小単位時間あたりの変動量dNout/dtが予め定められた値よりも大きいことにより車両が悪路を走行していると判定されること、などの条件のいずれかあるいは複数によって構成される。これは、例えば、変速点の修正に係るアップ変速が、エンジン回転数の変化が大きいダウン変速の直後に行われる場合であることがこれに該当する。すなわち、キックダウンのようなアクセル全開によるダウン変速が行われた場合、エンジン回転速度の変化が大きいため、それに続いて行われるアップ変速において変速点の修正を行おうとすると、変速点を低車速(低エンジン回転速度)側に大幅に修正してしまい、その結果、アップ変速がダウンシフトの直後に行われ、いわゆるビジーシフトが生ずるといった、意図しない誤反映となるためである。このように、変速点修正禁止条件に該当する場合には、修正実行禁止手段98は、前記変速点修正実行手段94が変速点を修正するのを禁止する。
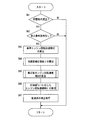
図6乃至図9及び図11乃至図20は、前記電子制御装置40の制御作動の要部すなわち変速点の修正制御作動の一例を説明するフローチャートである。図6において、ステップ(以下「ステップ」を省略する。)SA1では、本制御の実行の前提となる前提条件が成立したか否かが判断される。この実行条件とは、例えば、スロットル開度θthが所定値(たとえば100%またはその近傍の値)以上であることや、自動変速機16の作動油の油温Toilが所定値以上であること、トーイングモード等の所定の走行モードが適用されていること、などの条件のいずれかあるいは複数によって構成される。そして、SA1の判断が肯定された場合、すなわち、前記実行条件が満たされる場合には、続くSA2が実行され、また、SA1の判断が否定された場合には、本制御は実行されることがなく、本フローチャートは終了させられる。
修正実行禁止手段98に対応するSA2においては、本制御による変速点の修正を禁止する変速点修正禁止条件に該当しないか否かが判断される。この変速点修正禁止条件は、例えば、ダウンシフト後、予め定められた一定期間tdが経過していないことや、例えば自動変速機16の出力軸回転数Noutの微小単位時間あたりの変動量dNout/dtが予め定められた値よりも大きいことにより車両が悪路を走行していると判定されること、などの条件のいずれかあるいは複数によって構成される。そして、SA2の判断が肯定された場合、すなわち、前記変速点修正禁止条件に該当しない場合には、続くSA3以降の本発明の変速点の修正制御が実行される一方、SA2の判断が否定された場合には、本制御は実行されることがなく、本フローチャートは終了させられる。
エンジン回転加速度算出手段76および基準エンジン回転加速度算出手段74に対応するSA3においては、エンジン回転加速度Aおよび、基準エンジン回転加速度A2が算出される。すなわち、SA3では、まず、アップ変速判断時点においてエンジン回転速度センサ46により測定されるエンジン回転速度NEの微小単位時間あたりの変化量dNE/dtとしてエンジン回転加速度Aが算出され、また、アップ変速判断時点における車両の走行状態、たとえば車速V、スロットル開度θth、自動変速機16の入力トルクTinの少なくとも1つに基づいて、予め実験的に求められ、かつ記憶された関係から、基準エンジン回転加速度A2が算出される。
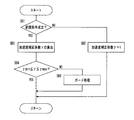
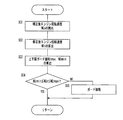
加速度補正係数算出手段90に対応するSA4においては、図7に示す加速度補正係数算出ルーチンが実行され、加速度補正係数γが算出される。図7に示す加速度補正係数算出ルーチンは、まずSB1において、その実行の前提条件を満たすかが判断される。この前提条件とは、たとえば、図示しない加速度補正選択スイッチが運転者により操作され、オンとされていること等である。そして、本判断が肯定された場合はSB3以降が実行され、一方否定された場合はSB2が実行される。
SB2においては、加速度補正が行われないようにすべく、加速度補正係数γの値がγ=1とされる。すなわち、γ=1とすると、本ルーチンの終了後図6に戻ってSA4以降が実行されるものの、変速点の修正は行われない結果となる。一方、SB3においては、先に実行されたSA3において算出されたアップ変速判断時のエンジン回転加速度Aおよび基準エンジン回転加速度A2の値から、加速度補正係数γが、γ=A/A2のように算出される。また、SB3に続いて実行されるSB4においては、SB3において算出された加速度補正係数γが、予め設定された範囲γmin≦γ≦γmaxを満たすか否かが判断される。そして、当該判断が否定された場合、すなわちγが前記範囲を満たさない場合には、SB5が実行され、γが前記範囲の上限γmaxを上回る場合にはγの値が新たにγmaxとされ、一方、γが前記範囲の下限γminを下回る場合には、γの値が新たにγminとされることとなる。一方、SB4の判断が肯定された場合にはSB3において算出された加速度補正係数γがそのまま用いられる。以上のようにして、加速度補正係数γが算出されると、本ルーチンは終了する。
図6に戻って、修正後エンジン回転速度算出手段92および修正値制限手段96に対応するSA5においては、図8に示す修正後エンジン回転速度算出ルーチンが実行される。図8の修正後エンジン回転速度算出ルーチンは、まず、SC1において、前記変速点補正手段70において算出された学習後の変速点におけるエンジン回転速度NEoが読み出される。ここで、学習後の変速点とは、変速点補正手段70によって学習された、自動変速機16のばらつきに応じた学習補正後の変速点であり、その値は、例えば、変速点補正手段70によって変更され変速線図記憶手段52に記憶された変速線図から読み出されることができる。
続くSC2においては、SA4において算出された加速度補正係数γ、SC1において読み出されたNEo、および、予め設定された目標最大エンジン回転速度NEdと、予め記憶された関係式、例えば前記式(2)とから、修正後エンジン回転速度NEnが算出される。
続くSC3〜SC5は修正値制限手段96に対応するものである。まず、SC3においては、修正値が満たすべき範囲を設定する上限値NEnmaxおよび下限値NEnminが設定される。たとえば、上限値NEnmaxは、事前に設定された所定値α1と、SC1において読み出された、前記変速点補正手段70において算出された学習後の変速点におけるエンジン回転速度NEoとの和(NEo+α1)と、目標最大エンジン回転速度NEdのうちいずれか小さい値(min(NEo+α1,NEd))が用いられ、下限値NEnminは、前記変速点補正手段70において算出された学習後の変速点におけるエンジン回転速度NEoから、事前に設定された所定値α2を減じた値が用いられ得る。
SC4においては、SC2において算出された修正後エンジン回転速度NEnの値が、SC3において設定されたNEnmaxおよびNEnminによって構成される範囲、すなわち、NEnmin≦NEn≦NEnmaxを満たすか否かが判断される。そして、本判断が否定される場合にはSC5が実行され、一方本判断が肯定される場合には、SC2において算出されたNEnがそのまま修正後エンジン回転速度として用いられる。
SC5においては、SC2において算出された修正後エンジン回転速度NEnの値が、SC3において設定されたNEnmaxを上回っている場合には、NEnの値が新たにNEnmaxとされ(NEn=NEnmax)、一方、NEnの値がNEnminを下回っている場合には、NEnの値が新たにNEnminとされる(NEn=NEnmin)、いわゆるガード処理が行われる。以上により、NEnの値が定められると、本ルーチンは終了する。
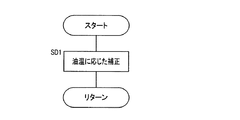
図6に戻って、AT油温反映手段97に対応するSA6においては、図9に示す自動変速機作動油温反映ルーチンが実行される。図9の自動変速機作動油温反映ルーチンにおいては、SD1において、SA5で算出された修正後エンジン回転速度NEnの値が、アップ変速判断時の自動変速機16の作動油の油温Toilの値に応じて補正される。この補正により、油温反映後の修正後エンジン回転速度NEn’は、例えば、予め実験的に求められ、記憶された自動変速機16の作動油温Toilと補正係数μの関係を用い、SA5で算出された修正後エンジン回転速度NEnの値に前記補正係数μを乗ずることによって、すなわち、NEn’=NEn×μ のように算出される。
図6に戻って、変速点修正実行手段94に相当するSA7においては、アクセル開度が全開若しくは略全開であって、エンジン12の回転速度が、SA6において算出された自動変速機16の作動油の油温Toilが反映された修正後エンジン回転速度NEn’となった時点において変速判断手段54による変速出力が実行されるように、変速点の修正がされる。尚、変速点はたとえば、図4に示すような、車速V(km/h)とアクセル開度θacc(%)を軸とする平面で定義される座標上に示されるものであるから、修正後エンジン回転速度NEn’(rpm)は、ギヤ比等を考慮して適宜その単位が換算され、例えば、図4における破線で表されるように、変速線上にエンジン回転数の修正が反映されることとなる。
図10は、前記学習補正値調整手段100および加速度変動検出手段102の詳細な制御機能の要部を説明する機能ブロック線図である。図10に示すように、学習補正値調整手段100は、学習ゲイン調整手段140、ガード値調整手段142などからなる。また、加速度変動検出手段102は、加速度フィルタ処理手段144、第1変動検出手段146、第2変動検出手段148、変動検出判定手段150などからなる。
学習ゲイン調整手段140は、前記加速度変動検出手段102が車両加速度aの変動を検出した場合において、学習補正値算出手段80において用いられる学習ゲインKの値をエンジン回転加速度の変動を検出しない場合に比べて小さい値K’とする。ここで、K’は例えばK’=K×αのように定義され、αは低減の度合いを決定する係数であり、例えば0.5のように予め定義される。
ガード値調整手段142は、前記加速度変動検出手段102が車両加速度aの変動を検出した場合において、補正値制限手段82によって1回あたりの変速点学習値ΔGをガード処理する際に用いられる範囲の上限と下限を決定する値であるガード値ΔGmaxおよびΔGminの値を、車両加速度aの変動を検出しない場合に比べて小さい値ΔGmax’およびΔGmin’とする。ここで、ΔGmax’=ΔGmax×β1、ΔGmin’=ΔGmin×β2であって、β1およびβ2は低減の度合いを決定する係数であり、例えばβ1=β2=0.5のように予め定義される。
加速度フィルタ処理手段144は、車両加速度aの値に対しフィルタ処理を実行し、フィルタ処理後の車両加速度asを得る。具体的には前記フィルタ処理は、例えば高速フーリエ変換(FFT)などであり、車両が振動する特定の周波数が予測されるなどにより限定される場合には、前記特定の周波数を除去することにより処理後の車両加速度asを用いることで車両加速度aの変動を低減することができる。なお、前記車両が振動する特定の周波数が予測できる場合とは、例えば車両が波状路を走行する場合に例えば10Hz等の共振振動が発生することが予測できる場合等である。
第1変動検出手段146は、例えば(1)車速Vが第1規定値以上であること、(2)変速中でないこと、および、(3)実際の車両加速度aと前記フィルタ処理後の車両加速度asの偏差Δa(=|a−as|)が第1所定値以上であることのすべてを満たすことからなる第1変動検出条件を満たし、かつ、一旦前記第1変動検出条件を満たした後に、(4)車速Vが第2規定値以下であること、あるいは、(5)前記偏差Δaが第2所定値以下であることの第1変動検出解除条件を満たさないこと、の何れもを満たすか否かを判定することにより、車両加速度aに第1の変動が生じているかを検出する。ここで、前記第1変動検出条件である(1)〜(3)の条件は、車両加速度aに比較的大きな変動が生じていることを検出するための条件であり、前記(1)の条件は、車両の発進に伴う加速時には偏差Δaが大きくなるためこれを除外するために設けられるものであって、前記第1規定値はかかる目的を満たすように予め実験的にあるいはシミュレーションにより算出される。また、前記(2)の条件は、変速中は偏差Δaが大きくなるためこれを除外するために設けられるものである。さらに、前記(3)の条件における前記第1所定値は、偏差Δaがその値を上回った場合に車両加速度aの変動があったと判定するために予め実験的にあるいはシミュレーションによって決定される値であり、例えば前記加速度フィルタ処理手段144による処理の内容を考慮して決定される。前記第1変動検出解除条件である(4)〜(5)の条件は、一旦前記第1変動検出条件を満たした場合であってもその後変動の影響がなくなったことを判定するための条件であって、前記(4)の条件における第2規定値および前記(5)の条件における第2所定値の値は、例えば第1変動検出手段146としての判断が頻繁に反転することのないよう、例えばそれぞれ第1規定値および第1所定値の値との間に一定のヒステリシスが設けられるように決定される。そして、第1変動検出手段146は、前記第1変動検出条件が満たされる場合には第1変動判定フラグをオンとして、比較的大きな変動が生じたと判定する。また、前記第1変動検出解除条件が満たされた場合には一旦オンとされた前記第1変動判定フラグをオフとして、変動が生じていないと判定する。
第2変動検出手段148は、例えば(1)車速Vが第3規定値以上であること、(2)変速中でないこと、および、(3)後述する変動判定カウンタCの値が第3所定値以上であることの全てを満たすことからなる第2変動検出条件を満たし、かつ、一旦前記第2変動検出条件を満たした後に、(4)車速Vが第4規定値以下であること、あるいは、(5)前記変動判定カウンタCの値が第4所定値以下であることの第2変動検出解除条件を満たさないこと、の何れもを満たすか否かを判定することにより、車両加速度aに第2の変動が生じているかを検出する。ここで、前記第2変動検出条件である(1)〜(3)の条件は、車両加速度aに比較的小〜中規模の変動が生じていることを検出するための条件であり、前記(1)の条件は、車両の発進に伴う加速時には(3)の条件である前記変動判定カウンタCの値が大きくなるためこれを除外するために設けられるものであって、前記第3規定値はかかる目的を満たすように予め実験的にあるいはシミュレーションにより算出される。また、前記(2)の条件は、変速中は前記変動判定カウンタCの値が大きくなるためこれを除外するために設けられるものである。さらに、前記(3)の条件における前記第3所定値は、前記変動判定カウンタCの値がその値を上回った場合に車両加速度aの変動があったと判定するために予め実験的にあるいはシミュレーションによって決定される。前記第2変動検出解除条件である(4)〜(5)の条件は、一旦前記第2変動検出条件を満たした場合であってもその後変動の影響がなくなったことを判定するための条件であって、前記(4)の条件における第4規定値および前記(5)の条件における第4所定値の値は、例えば第2変動検出手段148としての判断が頻繁に反転することのないよう、例えばそれぞれ第3規定値および第3所定値の値との間に一定のヒステリシスが設けられるように決定される。そして、第2変動検出手段148は、前記第2変動検出条件が満たされる場合には第2変動判定フラグをオンとして、比較的大きな変動が生じたと判定する。また、前記第2変動検出解除条件が満たされた場合には一旦オンとされた前記第2変動判定フラグをオフとして、変動が生じていないと判定する。
前記変動判定カウンタCは、例えば最初C=0とされたカウンタに対し、以下の規則に基づいて所定期間処理を反復することによってその値が得られる。すなわち、(1)走行中の自動変速機16の変速段が規定の変速段よりも高速側の変速段であり変速終了直後である場合にはリセット(C=0)とし、(2)車速Vが第5規定値以上であり、変速中でなく、偏差Δaが第5所定値以上であることの全てを満たす場合には1を加え、(3)車速Vが前記第5規定値以上であり、変速中でなく、偏差Δaが前記第5所定値未満であることの全てを満たす場合には1を減じ、(4)それ以外の場合には以前の値のままとする、という規則である。ここで、前記(1)の規則は、予め変速のタイミングの学習対象とされている規定の変速段よりも高速段の変速段であることをカウンタCの前提とすること、および、変速によって変速段が変更された場合にはカウンタCをリセットすることを規定している。また、前記(2)および(3)の規則における第5規定値は、前記第1規定値同様、車両の発進に伴う加速時には偏差Δaが大きくなるためこれを除外するために設けられるものであって、前記第5規定値もかかる目的を満たすように予め実験的にあるいはシミュレーションにより算出される。また、変速中は偏差Δaが大きくなるため変速中でないことも前記(2)および(3)の規則に含まれる。さらに、前記第5所定値は、偏差Δaがその値を上回った場合に車両加速度aの変動が生じていると判定するために予め実験的にあるいはシミュレーションによって決定される値であり、例えば前記加速度フィルタ処理手段144による処理の内容を考慮して決定される。すなわち、前記(1)の規則がカウンタCの処理のリセットを行う一方、(2)乃至(4)の規則によって、カウンタCの処理を行う前記所定期間の間に、変動を生じた回数と生じなかった回数を計測している。なお、変動判定カウンタCの値は、その値が負の値とならないように、また、その値が大きくなりすぎることにより前記第2変動検出解除条件を満たすことが遅れることのないように、例えば1回の処理が行なわれる毎にガード処理が行なわれ、予め定められた範囲の値となるようにされる。
変動検出判定手段150は、前記第1変動検出手段146および前記第2変動検出手段148がそれぞれ車両加速度aの第1の変動および第2の変動を検出したか否か、すなわち前記第1変動判定フラグおよび第2変動判定フラグの内容に基づいて、変動を検出したか否かの判定を第3変動判定フラグにより行う。具体的には、例えば変動検出判定手段150は、前記第1変動検出手段146および第2変動検出手段148の少なくとも一方が変動を検出したこと、すなわち第1変動判定フラグおよび第2変動判定フラグの何れか一方でもオンになっていることからなる変動判定条件が満たし、かつ、また、前記第1変動検出手段146および第2変動検出手段148の何れもが変動を検出しない場合、すなわち第1変動判定フラグおよび第2変動判定フラグの何れもがオフになっていることからなる変動判定解除条件を満たさないこと、の何れもを満たす場合に、第3変動判定フラグをオンとして、車両加速度aの変動を検出したと判定する。また、前記変動判定解除条件が満たされた場合には一旦オンとされた前記第3変動判定フラグをオフとして、変動が生じていないと判定する。
図11は、変速点補正手段70の作動の一例を説明するフローチャートであり、例えば前記図8のSC1において用いられる変速点の補正のための補正値の一例である補正後の変速点に対応するエンジン回転速度NEoの算出に用いられる。
図11において、SE1では、本ルーチンの実行の前提となる実行条件が成立したか否かが判断される。この実行条件とは、たとえば、スロットル開度θthが全開(たとえば100%またはその近傍の値)であり、油温Toilが所定値以上の自動変速機暖機状態であり、エンジン水温Twが所定値以上のエンジン暖機状態であり、エンジン回転速度センサなどが正常であり、全開アップ変速に関与する油圧式摩擦係合装置が正常であることである。上記SE1の判断が否定される場合はその状況において変速が実行されても、その際の変速点の学習については実行されず、本フローチャートは終了する。正常な状態における変速ではなく、誤学習となるためである。一方、SE1の判断が肯定される場合は、続くSE2以降が実行される。
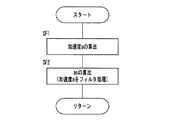
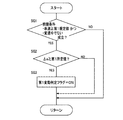
続くSE2およびSE3は、車両加速度変動検出手段102に対応する。このうち、加速度フィルタ処理手段140に対応するSE2においては、図12に示す車両加速度フィルタ処理ルーチンが実行される。図12の車両加速度フィルタ処理ルーチンにおいては、SF1において、まず車両加速度aが算出される。具体的には、駆動輪に設けられた回転速度センサやトルクコンバータのタービン14tの回転速度センサによって計測された値から車速Vを算出し、算出された車速Vの微小単位時間あたりの変化量dV/dt(=(V(t+Δt)−V(t))/Δt)を算出することなどによって算出される。
続いてSF2においては、SF1において算出された車両加速度aを例えば高速フーリエ変換することなどによって、フィルタ処理を行い、特定の周波数成分を除去するなどした処理後の車両加速度asが算出される。
図11に戻って、第1変動検出手段146、第2変動検出手段148および変動検出判定手段150に対応するSE3においては、図13乃至図19に示す各ルーチンが実行される。図13および図14のルーチンは第1変動検出手段146に対応するものであって、図13が前記第1変動検出条件を満たすか否かの判定に用いられる一方、図14は例えば図13のルーチンの実行後に実行され、前記第1変動検出解除条件を満たすか否かの判定に用いられる。
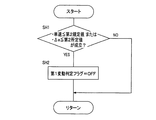
図13のSG1においては、前提条件として、車速Vが前記第1規定値以上であること、かつ、変速中でないことが満たされるか否かが判断される。そして、本判断が肯定される場合には続くSG2が実行される。一方、本判断が否定される場合には、前提条件を満たさないとして、第1変動判定フラグがオンにされることなく、本ルーチンは終了される。
SG2においては、実際の車両加速度aと前記フィルタ処理後の車両加速度asの偏差Δa(=|a−as|)が前記第1所定値以上であるか否かが判断される。そして、本判断が肯定された場合には、前記第1変動検出条件を満たしたとして、SG3において第1変動判定フラグがオンとされ、本ルーチンが終了される。一方、本判断が否定された場合には、第1変動判定フラグがオンにされることなく本ルーチンが終了される。
図14のSH1においては、車速Vが前記第2規定値以下であること、あるいは、前記偏差Δaが第2所定値以下であることの第1変動検出解除条件を満たすか否かが判断される。そして、本ステップの判断が肯定される場合には、続くSH2において前記第1変動判定フラグがオフとされる。一方、本ステップの判断が否定される場合には、第1変動判定フラグの内容が変更されることなく、本ルーチンは終了される。
図15乃至17は、前記第2変動検出手段148に対応するものである。このうち、図15は、前記変動判定カウンタの処理に用いられるものである。図15のSI1においては、本ルーチンの実行にあたり、変動判定カウンタCの値がリセットすなわち零とされる。
続くSI2においては、自動変速機16の変速段が規定の変速段よりも高速側の変速段であり、かつ、変速終了直後であるか否かを判断し、その判断が肯定される場合には、続くSI3において変速後の変速段について新たにカウントを開始すべく変動判定カウンタCをリセット(C=0)する。一方、SI2の判断が否定される場合には、それまでの変動判定カウンタCの値を保持したまま、続くSI4以降が実行される。なお、前記規定の変速段とは、前記第2変動検出手段148で検出の対象とする小〜中規模の変動が生じ得る走行状態となる変速段においてSI2の判断が肯定される様に予め実験的にあるいはシミュレーション等により、例えば第4速段とそれよりも高速側の変速段での走行を対象として変動判定カウンタの処理を行なう場合には前記規定の変速段が第3速段のように決定される。
SI4においては、車速Vが前記第5規定値以上であり、変速中でなく、偏差Δaが前記第5所定値以上であることの全てを満たすか否かが判断される。そして、SI4の判断が肯定される場合には、続くSI5において変動判定カウンタCの値に1が加えられる。一方、本ステップの判断が否定される場合には、それまでの変動判定カウンタCの値を保持したまま続くSI6以降が実行される。
SI6においては、車速Vが前記第5規定値以上であり、変速中でなく、偏差Δaが前記第5所定値未満であることの全てを満たすか否かが判断される。そして、SI6の判断が肯定される場合には、続くSI7において変動判定カウンタCの値から1を減じられる。一方、本ステップの判断が否定される場合には、SI8においてそれまでの変動判定カウンタCの値を保持したまま、続くSI9以降が実行される。
SI9においては、SI1乃至SI8が実行された結果、得られた変動判定カウンタCの値がCmin≦C≦Cmaxを満たすか否かが判断される。そして本判断が肯定される場合には、得られた変動判定カウンタCの値を結果として、SI11が実行される。一方、SI9の判断が否定される場合には、続くSI10において、変動判定カウンタCの値がC>Cmaxの場合にはC=Cmax、C<Cminの場合にはC=Cminとする、いわゆるガード処理が実行される。このガード処理のうち、その下限については、いわゆる下限側のガード値Cminが例えばCmin=0とされ、変動判定カウンタCが負の値をとることがないようにされる。また、上限については、後述する第2変動検出手段148によって第2変動検出解除条件を満たすかが判断される際(具体的には後述する図17のフローチャートにおけるSK1がこれに該当する)において、変動判定カウンタCの値が大きくなりすぎてしまい、第2変動検出解除条件が満たされるのに時間を要するという問題を回避するために行なわれる。したがって、上限側のガード値Cmaxは、第2変動検出条件が満たされ学習補正値調整手段100による学習補正値の調整が開始されてから、第2変動検出解除条件が満たされ学習補正値調整手段100による学習補正値の調整から終了するまでの間の設計上最大の時間などに基づいて決定される。具体的には、例えば、第2変動検出条件が満たされ学習補正値調整手段100による学習補正値の調整が開始されてから、第2変動検出解除条件が満たされ学習補正値調整手段100による学習補正値の調整から終了するまでの時間を最大2000msとなるように設計する場合であって、本図15のルーチンが10msの周期で実行される場合には、例えばCmax=200のように決定される。
SI11においては、本ルーチンの実行が開始から所定時間だけ行われたか否かが判断される。本判断が肯定される場合、すなわち、本ルーチンが前記所定時間だけ実行された場合には、本ルーチンを終了する。一方、本ステップの判断が否定される場合、すなわち、本ルーチンの実行が前記所定時間に満たない場合には、前記所定時間が経過するまで、すなわち本ステップの判断が肯定されるまでの間SI2乃至SI10が反復されるべく、SI2に戻る。なお、前記所定時間とは、第2変動検出手段148が加速度の変動を検出するために十分な時間として予め実験的にあるいはシミュレーションにより算出される。
図16及び図17は、第2変動検出手段148に対応するものであって、図16が前記第2変動検出条件を満たすか否かの判定に用いられる一方、図17は例えば図16のルーチンの実行後に実行され、前記第2変動検出解除条件を満たすか否かの判定に用いられる。
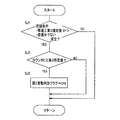
図16のSJ1においては、前提条件として、車速Vが前記第3規定値以上であること、かつ、変速中でないことが満たされるか否かが判断される。そして、本判断が肯定される場合には続くSJ2が実行される。一方、本判断が否定される場合には、前提条件を満たさないとして、第2変動判定フラグがオンにされることなく、本ルーチンは終了される。
SJ2においては、図15のルーチンによって算出された変動判定カウンタCの値が前記第3所定値以上であるか否かが判断される。そして、本判断が肯定された場合には、前記第2変動検出条件を満たしたとしてSJ3において第2変動判定フラグがオンとされ、本ルーチンが終了される。一方、本判断が否定された場合には、第2変動判定フラグがオンにされることなく本ルーチンが終了される。
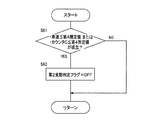
図17のSK1においては、車速Vが前記第4規定値以下であること、あるいは、前記変動判定カウンタCの値が前記第4所定値以下であることの第2変動検出解除条件を満たすか否かが判断される。そして、本ステップの判断が肯定される場合には、続くSK2において前記第2変動判定フラグがオフとされる。一方、本ステップの判断が否定される場合には、第2変動判定フラグの内容が変更されることなく、本ルーチンは終了される。
図18及び図19は、変動検出判定手段150に対応するものであって、図18が前記変動判定条件を満たすか否かの判定に用いられる一方、図17は例えば図16のルーチンの実行後に実行され、前記変動判定解除条件を満たすか否かの判定に用いられる。
図18のSL1においては、図13および図14のルーチンによって決定された第1変動判定フラグの内容がオンであるか否かが判断される。そして、本判断が肯定される場合、すなわち第1変動判定フラグがオンである場合にはSL3が実行される。一方、本SL1の判断が否定される場合、すなわち第2変動判定フラグがオフである場合には、続くSL2が実行される。
SL2においては、図16及び図17のルーチンによって決定された第2変動判定フラグの内容がオンであるか否かが判断される。そして、本判断が肯定される場合、すなわち、第2変動判定フラグがオンである場合にはSL3が実行される。一方、本SL2の判断が否定される場合、すなわち第2変動判定フラグがオフである場合には、SL4が実行される。
SL3においては、第3変動判定フラグがオンとされる。一方SL4においては第3変動判定フラグがオフとされる。すなわち、図18のルーチンにおいては、前記第1変動判定フラグと第2変動判定フラグの少なくとも一方がオンであれば第3変動判定フラグをオンとする一方、第1変動判定フラグと第2変動判定フラグがともにオフである場合には第3変動判定フラグをオフとする作動を行っている。
一方図19のSM1においては、第1変動判定フラグがオフであるか否かが判断される。そして本判断が肯定される場合、すなわち第1変動判定フラグがオフである場合には続くSM2が実行される。一方本SM1の判断が否定される場合、すなわち第1変動判定フラグがオンである場合には、以前の第3変動判定フラグの値を保持したまま本ルーチンを終了する。
SM2においては、第2変動判定フラグがオフであるか否かが判断される。そして本判断が肯定される場合、すなわち第2変動判定フラグがオフである場合には続くSM3が実行される。一方本SM2の判断が否定される場合、すなわち第2変動判定フラグがオンである場合には、以前の第3変動判定フラグの値を保持したまま本ルーチンを終了する。
SM3においては、第3変動判定フラグの値がオフとされる。すなわち、本図19のルーチンにおいては、第1変動判定フラグ、第2変動判定フラグが共にオフである時のみ第3変動判定フラグの値をオフとする一方、第1変動判定フラグおよび第2変動判定フラグの少なくとも何れか一方がオンである場合には従前の値を保持する作動を行っている。そして、前記第3変動判定フラグの値を決定することにより、図13乃至図19の一連のルーチンの実行が完了する。
図11に戻って、前記基準エンジン回転加速度算出手段74に対応するSE4においては、基準エンジン回転加速度A2が算出される。すなわち、SE4では、変速出力時点における車両の走行状態、たとえば車速V、スロットル開度θth、自動変速機16の入力トルクTinの少なくとも1つに基づいて、予め実験的に求められ、かつ記憶された関係から、基準エンジン回転加速度A2が算出される。
推定最大エンジン回転速度算出手段72に対応するSE5においては、推定最大エンジン回転速度NEcの値が推定される。すなわち、SE5においては、SE4において算出された基準エンジン回転加速度A2、エンジン回転速度センサ46により検出された変速出力時点におけるエンジン12の回転速度NE1、イナーシャ相開始時点におけるエンジン12の回転速度NE2、および検出されたエンジン回転速度NEからエンジン回転加速度算出手段76により逐次算出されるエンジン回転加速度のうち変速出力時点のエンジン回転加速度A1を、前述の式(1)に適用することにより推定最大エンジン回転速度NEcの値が推定される。なお、上述の通り、通常、エンジン回転速度NEは変動(ノイズ)が大きいので、その移動平均などの平滑化フィルタ処理後のエンジン回転速度NEが用いられる。
続くSE6は、学習補正値算出手段80に対応する。SE6においては、図20に示す学習ルーチンが実行される。図20において、SN1では、SE5で推定された推定最大エンジン回転速度NEcと、予め設定された目標最大エンジン回転速度NEdとの偏差ΔNE1が算出される。
SN2乃至SN3は、学習ゲイン調整手段140に対応する。まず、SN2においては、第1乃至第3変動判定フラグの少なくともいずれか1つがオンであるか否かを判断することにより、車両加速度変動検出手段102によって車両加速度aの変動が検出されたか否かを判断する。そして、本判断が肯定、すなわち第1乃至第3変動判定フラグの少なくともいずれか1つがオンである場合には、続くSN3において、学習補正値算出手段80において用いられる学習ゲインKの値が、エンジン回転加速度の変動を検出しない場合に比べて小さい値K’とされる。一方、SN2の判断が否定される場合、すなわち第1乃至第3変動判定フラグの全てがオフである場合には、SN3が実行されることなく、SN4が実行される。
続いて、SN4では、SN1で算出された偏差ΔNE1に基づき、1回あたりの変速点学習量ΔGが決定される。ここでΔGは、ΔG=K×ΔNE1なる関係によって求められる。但しKは学習の重みを決定する学習補正係数(学習ゲイン)であって、予め与えられている。なお、前記SN3が実行された場合には、学習ゲインKに替えてSN3において算出されたK’が用いられる。
SN5乃至SN6はガード値調整手段142に対応する。まず、SN5においては、SN2と同様に第1乃至第3変動判定フラグの少なくともいずれか1つがオンであるか否かを判断することにより、車両加速度変動検出手段102によって車両加速度aの変動が検出されたか否かを判断する。そして、本判断が肯定、すなわち第1乃至第3変動判定フラグの少なくともいずれか1つがオンである場合には、続くSN6において、補正値制限手段82において用いられるいわゆるガード値ΔGmaxおよびΔGminの値が、それぞれエンジン回転加速度の変動を検出しない場合に比べて小さい値ΔGmax’およびΔGmin’とされる。一方、SN5の判断が否定される場合、すなわち第1乃至第3変動判定フラグの全てがオフである場合には、SN6が実行されることなく、SN6が実行される。
続くSN7及びSN8は、補正値制限手段82に対応する。まず、SN7においては、SN4で決定された1回あたりの学習量ΔGが予め定められた範囲(ΔGmin≦ΔG≦ΔGmax)を超えていないか否かが判定され、前記範囲を超えている場合には、ΔGの値を制限すべく、SN8が実行される。一方、SN7の判定が肯定される場合は決定されたΔGをそのまま学習に用いるものとして、ΔG’=ΔGとして、SN10に移る。SN8においては、ΔGが前記範囲の上限ΔGmaxを上回っている場合にはΔG=ΔGmaxとし、ΔGが前記範囲の下限ΔGminを下回っている場合にはΔG=ΔGminとする、ガード処理を行う。なお、前記SN6が実行された場合には、ガード値ΔGmax,ΔGminに替えてSN6において算出されたΔGmax’およびΔGmin’がそれぞれ用いられる。
SN9では、このようにして算出されたΔG’を前回の変速時までの全体学習量G(N−1)に加える事により、今回の変速における学習を加えた全体学習量G(N)とする。すなわち、今回の学習後の全体学習量G(N)は、G(N)=G(N−1)+ΔG’で表される。
続くSN10及びSN11は、補正値制限手段82に対応する。すなわち、SN10では、算出された全体学習量G(N)について、予め定められた範囲(Gmin≦G(N)≦Gmax)を超えていないかを判定し、SN10の判断が否定された場合、すなわち前記範囲を超えている場合には、SN11へ進む一方、SN10の判断が肯定された場合には、SN10において算出された全体学習量G(N)を学習結果として、本ルーチンは終了する。SN11においては、G(N)が前記範囲の上限Gmaxを上回っている場合にはG(N)=Gmaxとし、G(N)が前記範囲の下限Gminを下回っている場合にはG(N)=Gminとする、ガード処理を行い、それぞれの処理後のG(N)を学習結果として、本ルーチンは終了する。
図11に戻って、変速点補正手段84に対応するSE7においては、SE6(図11)の学習ルーチンの終了に伴って得られた学習後の全体学習量G(N)にもとづいて、変速線図記憶手段52に記憶された変速線図が補正され、本フローチャートは終了する。
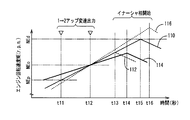
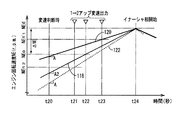
図21および図22は、第1速段から第2速段への(1→2)全開アップ変速時のエンジン回転速度NEの時間変化を表す図であって、図21は、本発明の実施例の適用がない場合、図22は本発明の実施例が適用された場合をそれぞれ表している。
まず、図21について説明する。従来、変速点補正手段70による自動変速機のばらつきに応じた変速点の学習補正が行われない場合、変速点におけるエンジン回転速度がNEpであるように設定されている。そして、図21における実線110の勾配が表すエンジン回転加速度で走行していた車両は、時刻t11において、エンジン回転速度NEが前記NEpを超え、アップ変速出力が開始される。すると、時刻t13において、イナーシャ相が開始され、エンジン回転速度は下降する(破線112)。このとき、エンジン回転速度NEは目標最大エンジン回転速度NEdに達することがなく、十分にエンジンの性能を使い切っていない。このような変速が変速点補正手段70によって学習され、変速点は、エンジン回転速度NEがNEoとなるように補正される。その結果、前記実線110の勾配が表すエンジン回転加速度で走行していた車両は、時刻t12において、エンジン回転速度NEが前記NEoを超え、アップ変速出力が開始されることとなる。そして、時刻t15において、イナーシャ相が開始され、そのときのエンジン回転速度NEのピークは目標最大エンジン回転速度NEdに接近し、エンジンの回転速度域を十分に使い切ることができる。
しかしながら、かかる変速点補正手段70による変速点の補正は、自動変速機のばらつきに応じたものであって、車両の加速度に応じたものではないことから、学習時の加速度とは異なる加速度において前記全開アップ変速が行われる場合、たとえば、図21において点線116の勾配で示されるような高加速度による走行時には、イナーシャ相開始時までのエンジン回転速度NEの変化において、そのエンジン回転速度NEが目標最大エンジン回転速度NEdを超えてしまうことがあり、逆に、図21において太線114の勾配で示されるような低下速度による走行時には、エンジン回転速度NEが目標最大エンジン回転速度NEdに達することがないままイナーシャ相が開始されてしまうことがある。
一方、本発明の実施例が適用された図22によると、アップ変速判断時t20においてエンジン回転加速度Aおよび基準エンジン回転加速度A2が算出され、また、それらの比である加速度補正係数γが算出され、算出された加速度補正係数γに基づいて、変速点補正手段70によて学習補正され、変速線図記憶手段52に記憶された補正後の変速点が修正される結果、変速実行時の加速度がばらつく場合であっても、変速出力後イナーシャ相開始までのエンジン回転速度NEの変化が、目標最大エンジン回転速度NEdに接近するようにされる。
すなわち、図22において、実線118で表された、加速度補正係数γ=1、すなわちアップ変速判断時t20におけるエンジン回転加速度A2が基準エンジン回転加速度Aと等しい場合においては、変速点は変速点補正手段70によって学習補正されたエンジン回転速度がNEoに対応する変速点から修正がされない。したがって、時刻t22においてエンジン回転速度NEがNEoを超え、変速出力が開始され、また、その後時刻t24においてイナーシャ相が開始されるまでに、エンジン回転速度NEは、目標最大エンジン回転速度NEdに接近する。
また、点線122で表された、加速度補正係数γ>1、すなわち、アップ変速判断時t20におけるエンジン回転加速度A2が基準エンジン回転加速度Aよりも大きい高加速度時においては、変速点は変速点補正手段70によって学習補正されたエンジン回転速度がNEoに対応する変速点から、エンジン回転速度がNEn’2に対応する変速点に修正がされる。その結果、時刻t21において、エンジン回転速度NEがNEn’2を超えて変速出力が開始され、また、その後時刻t24においてイナーシャ相が開始されるまでにエンジン回転速度NEが目標最大エンジン回転速度NEdに接近する。一方、太線120で示された、加速度補正係数γ<1、すなわち、アップ変速判断時t20におけるエンジン回転加速度A2が基準エンジン加速度Aよりも小さい低加速度時においては、変速点は変速点補正手段70によって学習補正されたエンジン回転速度がNEoに対応する変速点から、エンジン回転速度がNEn’1に対応する変速点に修正がされる。その結果、時刻t23においてエンジン回転速度NEがNEn’1を超えて変速出力が開始され、また、その後時刻t24においてイナーシャ相が開始されるまでにエンジン回転速度NEが目標最大エンジン回転速度NEdに接近する。
尚、図22において、アップ変速判断時t20は、変速点の修正によって、変速出力開始時が基準加速度A2における走行時(t22)よりも早まる可能性を考慮して設定される。たとえば、車両が基準加速度A2で走行する場合における変速時t22から、変速点の修正によって最大で例えばt21まで変速時が早まる可能性がある場合には、少なくとも、時刻t21から、さらに変速判断やそれに伴う計測や計算の処理に要する時間だけ早まった時刻と設定されれば良い。このとき、変速点の修正にあたり、修正する変速点に対応するエンジン回転速度はガード処理がなされ、その下限NEnminが設けられていることから、そのエンジン回転速度と、想定し得る車両の加速度に応じて変速出力開始時が最も早まる場合の時刻を算出し得る。
以上の実施例によれば、変速点リアルタイム修正手段60においては、変速点補正手段70によって変速出力後においても所定期間上昇するエンジン回転速度NEの最大値が目標最大エンジン回転速度NEdに接近するように変更された変速点が、エンジン回転加速度算出手段(76・SA3)によって算出されたパワーオン走行時でのアップ変速判断時点の実際のエンジン回転加速度の値Aと、基準エンジン回転加速度算出手段(74・SA3)によって算出された、実際のエンジン回転加速度の値を車両の加速度に影響しない基準走行状態における値に置換した基準エンジン回転加速度A2との比の値である、加速度補正係数算出手段(90・SA4)によって算出された加速度補正係数γと、目標最大エンジン回転速度NEdとに基づいて修正後エンジン回転速度算出手段(92・SA5)によって修正後の変速点に対応するエンジン回転速度が算出され、変速点修正実行手段(94・SA7)によってリアルタイムで変速点が修正されることから、実際のエンジン回転加速度を考慮したタイミングで変速指示を行うことができ、原動機の回転加速度Aが基準回転加速度A2と異なる場合、すなわち、車両の加速度に影響を与える牽引(トーイング)時や、登坂路走行時といった走行条件においても、エンジン回転速度NEを目標最大エンジン回転速度NEdに近づけることができる。
また、上述の実施例によれば、変速点リアルタイム修正手段60においては、基準エンジン回転加速度算出手段(74・SA3)によって、パワーオン走行時でのアップ変速判断時のエンジン回転加速度の値Aを、車両の加速度に影響しない基準走行状態における値に置換した基準エンジン回転加速度A2を算出するため、基準エンジン回転加速度A2とアップ変速判断時のエンジン回転加速度との比の値に基づいて補正値をさらに修正するので、牽引(トーイング)時や登坂路走行時のように車両の加速度が通常状態と異なる場合においても、加速度の大きさに応じた変速点の修正を行うことができる。
また、上述の実施例によれば、特に変速中の最大エンジン回転速度NEが目標最大エンジン回転速度に追従することが必要とされるWOT(Wide Open Throttle;全開)変速時において、エンジン回転速度NEが目標最大エンジン回転速度NEdに精度よく追従することが可能となり、エンジン回転速度NEが目標最大エンジン回転速度NEdに到達することなくアップシフトが実行される現象や、エンジン回転速度NEが許容される最大のエンジン回転速度を超過した状態が継続したままアップシフトが行われる現象の発生を抑止することが可能となり、上記減少に伴う使用者の違和感を低減することができる。
また、上述の実施例によれば、変速点補正手段(70・SC1)は、パワーオン走行時でのアップ変速出力後のエンジン回転速度NEの最大値を車両の加速度に影響しない基準走行状態における値に置換した推定最大エンジン回転速度を推定し、該推定最大エンジン回転速度と目標最大エンジン回転速度NEdとの偏差に基づいて算出した補正値に基づいて補正された変速点について、変速点リアルタイム修正手段60が補正値をリアルタイムで修正するので、自動変速機のばらつきに応じた変速点の補正に加え、車両の加速度Aのばらつきに応じた変速点の修正をも行うことができる。
また、上述の実施例によれば、変速点補正手段(70・SC1)は車両加速度変動検出手段(102・SE3)によって検出された車両の加速度aの変動の大きさに基づいて補正値を調整するので、車両の加速度aの変動が生じた場合であっても、前記変速点補正手段による変速点の学習や、変速点の補正を中断することなく誤学習の影響を抑制しつつ継続することができる。
また、上述の実施例によれば、変速点補正手段(70・SC1)による補正値の調整は、加速度変動検出手段(102・SE3)によって検出された車両の加速度aの変動の大きさが大きいほど、車両加速度の変動がない場合に比べて前記補正値が小さくなるように調整するので(SN2〜3、SN5〜6)、悪路を走行する場合のように車両の加速度の変動が生じた場合において変速点の学習や補正を継続する場合であっても、前記補正値を規制するように調整がされ、その結果誤学習の影響すなわち誤ったタイミングで変速を実行するように変速点を補正することを抑制することができる。
また、上述の実施例によれば、修正後の変速点におけるエンジン回転速度である修正後エンジン回転速度NEnは、修正後エンジン回転速度算出手段(92・SA5)によって、アップ変速判断時点の実際のエンジン回転加速度と基準エンジン回転加速度との比の値である加速度補正係数γと、目標最大エンジン回転速度NEdと補正値に基づいて補正された変速点におけるエンジン回転速度である補正後エンジン回転速度NEoとの偏差ΔNE2とからに基づいて、予め記憶された関係から算出されうる。
また、上述の実施例によれば、修正後エンジン回転速度算出手段(92・SA5)には,加速度補正係数の値γと、目標最大エンジン回転速度NEdと、補正後エンジン回転速度NEoとの偏差ΔNE2とに基づいて、修正後エンジン回転速度NEnを算出する数式が予め記憶されており、修正後エンジン回転速度NEnは、逐次関係式から算出されることから、その都度正確に値を算出することができる。
また、上述の実施例によれば、修正後エンジン回転速度算出手段92によって算出された修正後エンジン回転速度NEnは、修正後エンジン回転速度算出手段92に含まれる修正値制限手段(96・SC3〜SC5)により、設定された上限値および下限値の間に制限されるので、変速点が大きく修正することがなく、誤判断による変速を防止できる。
また、上述の実施例によれば、修正後エンジン回転速度算出手段(92・SA6)は、自動変速機の作動油温度Toilに基づいて修正後エンジン回転速度NEnを決定するものであるので、油温Toil毎に異なる作動油粘度に基づく、変速時間のばらつきを抑止することができる。
また、上述の実施例によれば、予め設定された変速点修正禁止条件に該当する場合には修正実行禁止手段(98・SA2)によって、変速点リアルタイム修正手段60による変速点の修正が禁止されるため、変速点修正禁止条件に該当する場合には変速点の修正が行われることがない。
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
たとえば、上述の実施例においては、基準走行状態とは、予め定められた車両の基準人数乗車状態での平坦路走行であるとされたが、これに限られず、例えば、所定の積載量での走行状態など車両の加速度に影響のない走行状態であれば、これ以外の走行状態であってもよい。
また、上述の実施例においては、変速がスロットル開度θthが全開もしくは略全開時に行われる場合に適用されたが、これに限られず、スロットル開度θthの全開状態よりも低い開度での変速状態であっても適用可能である。
また、上述の実施例においては、変速点リアルタイム修正手段60が修正するのは、変速点補正手段70によって学習補正された、学習後の変速点であったが、これに限られず、例えば、学習のされていない、予め変速線図記憶手段52に記憶された変速点であってもよい。すなわち、この場合は変速点補正手段70は必ずしも必要ではなく、SC1において読み出される変速点は、例えば、予め変速線図記憶手段52において記憶されているものでよい。
また、上述の実施例においては、修正後エンジン回転速度算出手段92は、加速度補正係数γの値と、目標最大エンジン回転速度NEdと補正後エンジン回転速度NEoとの偏差ΔNE2の値とを予め記憶された数式に適用することにより修正後エンジン回転速度NEnを算出したが、これに限られず、例えば、加速度補正係数γの値と、目標最大エンジン回転速度NEdと補正後エンジン回転速度NEoとの偏差ΔNE2の値とに基づいて修正後エンジン回転速度NEnを算出し得るテーブル等によってもよい。本実施例によれば、修正後エンジン回転速度NEnは、加速度補正係数γの値と、目標最大エンジン回転速度NEdと補正後エンジン回転速度NEoとの偏差ΔNE2とに基づいてテーブルを参照することによって得られることから、その都度計算する必要がなくなり、計算に要する時間が不要となる。
また、上述の実施例においては、偏差ΔNE2は、目標最大エンジン回転速度NEdと補正された変速点における補正後エンジン回転速度NEoとの偏差とされたが、これに限られず、例えば目標最大エンジン回転速度NEdと補正前の変速点におけるエンジン回転速度である補正前エンジン回転速度との偏差とされてもよい。
また、上述の実施例においては、修正後エンジン回転速度算出手段92は修正値制限手段96を含み、修正後エンジン回転速度算出手段92によって算出された修正後エンジン回転速度NEnは、修正値制限手段96によりガード処理がされたが、これに限られず、ガード処理以外の方法で修正後エンジン回転速度NEnの値が制限されても良いし、あるいは修正後エンジン回転速度NEnの値が特に制限されることなく、修正後エンジン回転速度算出手段92によって算出された値がそのまま変速点修正実行手段94に用いられてもよい。特に、修正後エンジン回転速度NEnの値が特に制限されることがない場合には、修正値制限手段96(SC3〜SC5)は必要とされない。また、同様に、加速度補正係数算出手段90においても、加速度補正係数γがガード処理されていたが(SB4〜SB5)、これについても、他の方法により加速度補正係数γの値が制限されても良いし、あるいは制限されないようにしてもよい。
また、上述の実施例においては、修正後エンジン回転速度算出手段92は、AT油温反映手段97を含み、修正後エンジン回転速度算出手段92によって算出された修正後エンジン回転速度NEnは、AT油温反映手段97によって変速判断時点の自動変速機16の作動油の油温Toilに応じた補正係数μを乗じた値NEn’とされ、自動変速機16の作動油の油温を考慮したNEn’を用いて変速点修正実行手段94が変速点の修正を行うこととしていたが、必ずしもこれに限られず、修正後エンジン回転速度算出手段92によって算出された修正後エンジン回転速度NEnの値をそのまま用いて変速点修正実行手段94が変速点の修正を行ってもよい。この場合、AT油温反映手段97(SA6)は必要とされない。
また、上述の実施例においては、修正実行禁止手段98(SA2)は、変速点修正禁止条件に該当する場合には変速点の修正を行わないこととしたが、必ずしも本手段は変速点リアルタイム修正手段60に不可欠なものではなく、これを欠いた構成とすることも可能である。
また、上述の実施例においては、エンジン回転加速度関連値として、エンジン12の回転加速度Aが用いられたが、これに限られず、例えば、トルクコンバータ14のタービン翼車14tの回転加速度dNt/dtが用いられてもよいし、自動変速機16の出力軸回転加速度dNout/dtが用いられてもよく、図示しないプロペラシャフトの回転加速度が用いられてもよく、また、車両の加速度a(=dV/dt)が用いられてもよい。すなわち、エンジン回転加速度Aと1対1に対応する事によって定量的に同一視できる変数であればよく、車両に設けられたセンサから直接計測可能、あるいは計測可能な値から算出可能なエンジン回転加速度関連値であればよい。同様に、上述の実施例において用いられたエンジン12の回転速度NEは、これに代えて、例えばトルクコンバータ14のタービン翼車14tの回転速度Ntが用いられてもよいし、自動変速機16の出力軸回転速度Noutが用いられてもよく、図示しないプロペラシャフトの回転速度が用いられてもよく、また、車速Vが用いられてもよい。すなわち、エンジン回転速度NEと1対1に対応する事によって定量的に同一視できる変数であればよく、車両に設けられたセンサから直接計測可能、あるいは計測可能な値から算出可能なエンジン回転速度関連値であればよい。
また、本発明は、スロットル弁のないディーゼルエンジンや、筒内噴射エンジンにも適用される。このような場合には、スロットル開度θthに替えて、アクセル開度θaccや燃料噴射量、吸入空気量などが用いられ得る。
また、上述の実施例において、修正値制限手段96が修正後エンジン回転速度NEnのガード処理を行うにあたり、NEnが満たすべき範囲を決定する上限値及び下限値として、上限値NEnmaxは、事前に設定された所定値α1と、SC1において読み出された、前記変速点補正手段70において算出された学習後の変速点におけるエンジン回転速度NEoとの和(NEo+α1)と、目標最大エンジン回転速度NEdのうちいずれか小さい値(min(NEo+α1,NEd))が用いられ、下限値NEnminは、前記変速点補正手段70において算出された学習後の変速点におけるエンジン回転速度NEoから、事前に設定された所定値α2を減じた値が用いられた。また、加速度補正係数算出手段90は、加速度補正係数γを算出する際のガード処理を行うにあたり、γが満たすべき範囲を決定する上限値及び下限値は予め与えられた定数に基づいて決定されたが、これに限られず、例えば、前記上限値及び下限値を動的に変更するものであってもよい。
また、上述の実施例においては、自動変速機16の作動油温Toilは、アップ変速判断時点または略同時に測定されたものが用いられたが、これに限られず、例えば、アップ変速判断時点までの所定時間におけるToilの最高値や最低値、あるいは平均値が用いられても良い。
また、上述の実施例においては、第1速段から第2速段へのアップ変速が例示されたが、これを自動変速機16の有する各変速段の、全ての隣接する変速段間の変速毎に学習し、変速点の補正がされることもでき、また、特定の変速段間の変速についてのみ学習し、変速点の補正がされるものであっても良い。
また、上述の実施例においては、加速度フィルタ処理手段144においてはフィルタ処理として高速フーリエ変換が用いられたがこれに限られず、たとえば、ローパスフィルターなどの特定の周波数成分を除去するものであっても良いし、次式で与えられるいわゆるなまし処理を行って変換後の車両加速度asとしてもよい。
as(t)=as(t−Δt)+(a(t)−as(t−Δt))/K
ここで、Δtは例えば本式が反復して実行される場合の反復時間であって、例えば数ms乃至数十msに設定される微小時間である。また、Kはいわゆるなまし係数と呼ばれるものでって、前記なまし処理の度合いを決定する数である。
また、上述の実施例においては、第2変動検出手段148における変動判定カウンタCの処理は、予め決定された所定時間だけ反復して実行されるものとされたが(図15、SI9)、これに限られず、例えば所定回数反復して実行するようにしてもよいし、変速が発生しない限り、すなわち同一の変速段で走行し続ける限り反復を継続する様にしてもよい。また、逆に少なくとも所定時間だけ反復された後の変動判定カウンタCの値のみを用いるようにしてもよい。。
また、上述の実施例においては、学習ゲイン調整手段142においては、ゲインKの低減の度合いを決定する係数αは予め定義されていたが、これに限られず、例えば、車両加速度aの変動の度合いに応じて決定されてもよい。また、ゲインKの調整は、前記係数αを乗ずることにより、K’=K×α のようにされたが、これに限られず、例えば、変動レベルすなわち車両加速度aの偏差Δaの大きさに応じて、K’=K/Δaのように算出されてもよい。
また、上述の実施例においては、ガード値調整手段144において、ガード値の厳格化の度合いを決定する係数β1、β2は予め定義されていたが、これに限られず、例えば車両加速度aの変動の度合いに応じて決定されてもよい。また、ガード値の調整は、前記係数β1およびβ2をそれぞれΔGmax、ΔGminに乗ずることにより、ΔGmax’=ΔGmax×β1、ΔGmin’=ΔGmin×β2のようにされたが、これに限られず、例えば、ΔGmax、ΔGminの何れか一方を保持したまま他方を調整してもよいし、あるいは、変動レベルすなわち車両加速度aの偏差Δaの大きさに応じて、ΔGmax’=ΔGmax/Δa、ΔGmin’=ΔGmin/Δaのように算出されてもよい。
また、上述の実施例においては、第1乃至第5所定値および第1乃至第5規定値は予め実験によりあるいはシミュレーションにより決定されるものとされたが、これに限られず、例えば第1、第2および第5所定値については、変速段、車速、スロットル開度、AT油温の少なくとも1つに基づくテーブルやマップとして準備しておき、適宜該テーブルやマップから読み出した値を用いるようにすることもできる。
また、上述の実施例においては、加速度変動検出手段102は、第1変動判定フラグ乃至第3変動判定フラグによって車両加速度の変動の有無を判定したが、これに限られず、例えば、車両の加速度の偏差Δa(=a−as)の値が、定数E、基準エンジン回転加速度A2、目標最大エンジン回転速度NEdと補正後エンジン回転速度NEoとの偏差ΔNE2(=NEd−NEo)によって次式で表される関係を満たすか否かによって車両加速度の変動の有無を判定してもよい。
Δa=ρ×(E×A2)/ΔNE2
ここで、定数Eは加速度補正誤差、すなわち変速点の補正値における誤差の許容限界値であり、例えば、変速線図においてアップ変速線とダウン変速線の間に設けられるヒステリシスの値や、目標最大エンジン回転速度とフューエルカットエンジン回転速度との間に設けられる差の値等を考慮して決定される。また、ρは車両の加速度とエンジン回転加速度との変換のために用いられる定数であり、駆動輪の径などに基づいて決定される。なお、加速度変動検出手段102においては車両加速度の変動が検出されたが、これに限られず、例えばエンジン回転加速度、トルクコンバータのタービン14tの回転加速度などこれと1対1の関係もしくはそれに準ずる関係にある値が用いられてもよい。
尚、上述の実施例において変速点補正手段70は変速点リアルタイム修正手段60および変速制御手段50との組み合わせにおいて用いられたが、これに限られず、変速点の補正のための補正値の学習のために単独で用いられてもよい。すなわち、変速点補正手段70が単独で用いられても一定の効果を生ずる。