JP4769553B2 - 撮像装置 - Google Patents
撮像装置 Download PDFInfo
- Publication number
- JP4769553B2 JP4769553B2 JP2005331425A JP2005331425A JP4769553B2 JP 4769553 B2 JP4769553 B2 JP 4769553B2 JP 2005331425 A JP2005331425 A JP 2005331425A JP 2005331425 A JP2005331425 A JP 2005331425A JP 4769553 B2 JP4769553 B2 JP 4769553B2
- Authority
- JP
- Japan
- Prior art keywords
- lens
- shake
- subject
- image
- camera
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B5/04—Vertical adjustment of lens; Rising fronts
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Description
また、最近では、カメラに加わる手振れを防ぐシステムも研究されており、撮影者の撮影ミスを誘発する要因は殆ど無くなってきている。
撮影時のカメラの手振れは、周波数として通常1Hzないし10Hzの振動である。露光時点においてこのような手振れを起こしていても像振れの無い写真を撮影可能とするための基本的な考えとして、手振れによるカメラの振動を検出し、この検出結果に応じて補正レンズを光軸直交面内で変位させなければならない。これが光学防振システムである。
この場合、カメラ振れが生じても像振れが生じない写真を撮影するためには、第1にカメラの振動を正確に検出し、第2に手振れによる光軸変化を補正することが必要となる。
像振れの補正は、角速度センサ等でカメラ振れを検出し、カメラ振れの検出情報に基づき撮影光軸を偏心させる補正光学装置を駆動することにより像振れ補正が行われる(例えば、特許文献1参照)。
しかしながら、被写体の動きに上手にカメラを追従させるには、長年の経験が必要であり、初心者にとって流し撮りは難しい撮影方法である。
これに対して、カメラは静止したまま自動的に流し撮りを行うものが開示されている。これは、流し撮りモードにしたとき、予め主要被写体の速度と測距データをカメラに入力しておき、カメラを固定したまま待機する。すると、主要被写体が画面内に現れたときカメラは静止したままカメラブレ補正光学系が動いて、予め入力された速度と距離に従って主要被写体を追いかけて流し撮りができるものである(例えば、特許文献2参照)。
また上記特許文献3においては、動画撮影前提のため、異なる時間の複数の映像信号から被写体像の移動方向の変化量を検出できる。しかし、静止画撮影に適用した場合は、露光中撮像素子は撮像信号を蓄積しているだけなので、異なる時間の複数の撮像信号から被写体像の移動量を検出することは難しい。つまり肝心の露光中に被写体像の移動量を検出することは困難である。
そこで、本発明の課題は、主被写体の移動速度を検出し、きれいな流し撮り写真を撮影することのできるカメラ及びカメラシステム等の撮像装置を提供することにある。
本発明において、撮影レンズの焦点距離とは例えばズームレンズのズーム位置のことであり、被写体距離情報は測距手段などにより得られる距離情報である。
本発明の実施態様1に係るカメラ、レンズ及びカメラシステムは、カメラに加わる振れを検出する第1の振れ検出手段と、撮影レンズを通過した被写体像を検出する被写体像検出手段とを備える。また、前記被写体像検出手段の被写体像信号から被写体像の振れを検出する第2の振れ検出手段と、撮影レンズの光軸を偏心することのできる光軸偏心手段とを備える。また、前記第1の振れ検出手段の検出結果と前記第2の振れ検出手段の検出結果から被写体移動速度を算出する信号処理手段を備える。さらに、前記算出した被写体移動速度と前記第1の振れ検出手段の検出結果の差に基づいて光軸偏心手段を偏心させる光軸偏心制御手段を備える。
本発明の実施態様5に係るカメラ、レンズ及びカメラシステムは、上記実施態様1から3のいずれかにおいて、前記被写体像検出手段は、撮影レンズを通過した被写体像の焦点状態を検出する焦点検出手段であることを特徴とする。
本発明の実施態様6に係るカメラ、レンズ及びカメラシステムは、上記実施態様1から3のいずれかにおいて、前記被写体像検出手段は、撮影レンズを通過した被写体像を撮像する撮像手段であることを特徴とする。
図1は、カメラ本体1と交換レンズ2とからなるカメラシステムの構成を示す。被写体からの撮影光束は交換レンズ2の撮影光学系を通り、撮影準備中は中央部分がハーフミラーとなっているクイックリターン主ミラー3で一部が反射され、ペンタプリズム4において正立像となる。撮影者はこの正立像を光学ファインダ5において被写体像として確認することができる。6は測光回路であり、不図示のピント板面上の照度を測定して、その測定結果をカメラシステム制御用MPU7に入力する。カメラシステム制御用MPU7は露光時間、絞りなどの撮影条件を決定する。測光回路6内の測光センサは、複数のエリアに分割されており、エリアごとの測光結果を得ることができる。
8はサブミラーであり、クイックリターン主ミラー3の裏面に配置されており、クイックリターン主ミラー3のハーフミラー面を通過した光束を測距手段9に入射させる。測距手段9は入射した光束を光電変換及び信号処理して測距データを作成し、カメラシステム制御用MPU7に入力する。
13はタイミングジェネレータであり、撮像部12の蓄積動作、読み出し動作及びリセット動作などを制御する。14は撮像部12の蓄積電荷ノイズを低減するCDS回路(2重相関サンプリング回路)、15は撮像信号を増幅するゲインコントロール回路である。16は増幅された撮像信号をアナログからデジタルの画像データへ変換するA/D変換器である。
操作部21はカメラの撮影モードの設定や、記録画像ファイルサイズの設定や、撮影時のレリーズを行うためのスイッチ類である。
カメラシステム制御用MPU7はカメラ本体1の上記動作を制御するほか、カメラ本体1側のインターフェース回路22及び交換レンズ2側のインターフェース回路23を介して、レンズMPU24と相互に通信する。この通信では、交換レンズ2へフォーカス駆動命令を送信したり、デジタルカメラ本体1や交換レンズ2内部の動作状態や光学情報などのデータを送受信したりする。
フォーカスレンズ25は、レンズMPU24からの制御信号によりフォーカス制御回路29及びフォーカスレンズ駆動用モータ30を介して駆動される。フォーカス制御回路28には、フォーカスレンズ駆動回路のほか、フォーカスレンズの移動に応じたゾーンパターン信号やパルス信号を出力するフォーカスエンコーダなども含まれている。被写体距離はこのフォーカスエンコーダにより検知することができる。
ズームレンズ26は、撮影者が不図示のズーム操作環を操作することにより移動する。ズームエンコーダ31はズームレンズの移動に応じたゾーンパターン信号を出力する。撮影像倍率は、レンズMPU24がフォーカスエンコーダとズームエンコーダ31からの信号を読み取り、被写体距離と焦点距離の組み合わせにより予め記憶されている撮影像倍率データを読み出すことによって得られる。
絞り28は、レンズMPU24からの制御信号により絞り制御回路37及びステッピングモータ38を介して駆動される。
スイッチ39は像振れ補正ON/OFF及び像振れ補正動作モードの選択用スイッチである。像振れ補正モードは、通常の像振れ補正動作と流し撮り動作モードを選択することができる。
このカメラの測距手段9を用いて被写体の振れ量を検知する方法(第2の振れ検出手段)について簡単に説明する。先ず、被写体像を検出し、その像のデータを記憶しておく。次に、一定時間経過後、もう一度同じ被写体の像データを取り込み、この像データと先の記憶しておいた像データとを比較する。この時、被写体の振れが無ければ像データ(被写体像)は一致するが、振れがある場合はずれ量から被写体の振れ量を検出することができる。
図2(A)はある時刻における撮影状況を示しており、図2(B)は図2(A)の時刻から所定時間経過後の撮影状況を示している。図2(A)と図2(B)の中段の図において主被写体である自動車51は撮影画面中央の同じ位置にあり、そのときの測距センサの出力(図2下段の図)も図2(A)と図2(B)とは同様である。この場合、撮影者が行っている流し撮り速度と被写体の移動速度とが一致しており、きれいな流し撮りができていることを表している。
ところが、撮影者が行っている流し撮り速度と被写体の移動速度とが一致していない場合は、図2(C)のように主被写体である自動車51は撮影画面中央からはずれて、測距センサの出力も図2(A)とずれてしまう。図2(C)は図2(A)に対するタイミングが図2(B)と同一であるものとする。図2(C)において点線が図2(A)に相当し、点線と実線の差がずれに相当する。
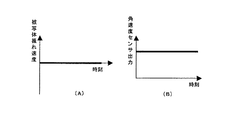
これに対して、図4にきれいに流し撮りができていない場合の測距センサから得られる被写体振れ速度と、角速度センサ出力の時間変化を示す。きれいに流し撮りができていない場合は、測距センサ上で被写体が左右に振れてしまうので、被写体振れ速度は図4(A)の実線のように変動してしまう。このとき、角速度センサ出力も一定速度で移動する被写体とは異なる角速度で流し撮りしているので図4(B)の実線で示すように変動してしまう。
Da=βLπθa/180・・・(1)
したがって、被写体振れ速度をVa、変動の角速度をωaとすると、以下のような関係式が成り立つ。
Va=βLπωa/180・・・(2)
実際に検出された角速度センサ出力ωから、上記変動角速度ωaを差し引くと、きれいに流し撮りを行うため、つまり移動する被写体を正確に追従するための角速度ω0が、以下のように算出される。
ω0=ω−ωa=ω−180Va/(βLπ)・・・(3)
ここで、ω0は移動する被写体を正確に追従するための角速度であるが、角速度×被写体距離=被写体移動速度であるから、式(3)は第1の振れ検出手段の検出結果(ω)と第2の振れ検出手段の検出結果(ωa)に基づいて被写体移動速度を算出する手段(信号処理手段)になっている。
また、カメラが露光シーケンスに入ってミラーアップした場合、式(3)のVaが得られなくなるが、変動角速度ωaは、実際に検出された角速度センサ出力ωから追従角速度ω0を差し引けば得られる。したがって、この変動角速度ωaから被写体振れをキャンセルするように像振れ補正用レンズ27を駆動すれば、流し撮り時の被写体振れが無くなり、きれいな流し撮り写真を撮影することが可能となる。即ち、角速度センサ出力ωから追従角速度ω0を差し引いたもの(第1の振れ検出手段の検出結果と被写体移動速度との差)に基づいて光軸偏心手段を偏心させること(光軸偏心制御手段)によって、きれいな流し撮り写真を撮影することが可能となる(段落0032、0033参照)。
まず図6のフローチャートに従ってカメラ本体(以下、カメラとも称する)1側の撮影動作を説明する。
カメラ本体1側でメインスイッチがONされていると、カメラシステム制御用MPU7は、ステップ100から動作を開始する。
(ステップ100)カメラ本体1の操作部21にあるレリーズスイッチが半押し(SW1ON)されたかどうかの判定を行う。半押しされたら、ステップ101へ進む。半押しされていなかったらステップ121へ進み、ここでの処理は終了する。
(ステップ101)インターフェース回路22、23を介し、交換レンズ(以下、レンズとも称する)2側のレンズMPU24とカメラレンズステータス通信を行う。ここでは、カメラの状態(レリーズスイッチの状態SW1ON、撮影モード、シャッター速度など)をレンズへ送信したり、レンズの状態(焦点距離、絞りの状態、フォーカスレンズの駆動状態など)を受信したりする。このカメラレンズステータス通信は、本実施例のフローチャートには主要な個所のみ記載したが、カメラの状態が変化したときや、カメラがレンズの状態を確認したいときなどに随時行われるものである。
(ステップ103)フォーカスレンズ駆動量を交換レンズ2へ送信する。このデータは、例えばフォーカスエンコーダの駆動目標パルス量として送信する。
(ステップ104)フォーカスレンズ駆動が終了すると、再測距を行う。
(ステップ105)合焦深度内であるかどうかの判定を行い、合焦深度内であればステップ106へ進む。
(ステップ106)合焦深度内であるので、合焦表示を行う。これはカメラ本体1の光学ファインダ5内にLEDを点灯させたり、音を発生させたりすることで行う。
(ステップ107)前述したような方法により、測距手段9の信号から被写体振れ速度を検出する。検出した被写体振れ速度データは交換レンズ2側へ送信される。
(ステップ108)測光回路6からの測光結果(輝度)を得て、露光時間Tv及び絞り値(絞り駆動量)を算出する。
(ステップ110)クイックリターン主ミラー3のミラーアップを行う。このときサブミラー8も主ミラー3とともにペンタプリズム4側へ駆動される。このとき、測距手段9へ入射していた被写体像は遮断される。
(ステップ111)ステップ108で求めた絞り駆動量を交換レンズ2へ送信し、絞り28の駆動を行わせる。
(ステップ112)先幕シャッターを駆動する。
(ステップ113)被写体像を撮像部12に露光し電荷を蓄積する。
(ステップ114)露光時間が経過したら、後幕シャッターを駆動し、露光を終了する。
(ステップ115)撮像部12からの電荷転送(読み出し)を行う。
(ステップ116)読み出した撮影画像信号は、CDS回路14、ゲインコントロール回路15、A/D変換器16を経てデジタルデータ(画像データ)へ変換され、バッファメモリ18に保存される。
(ステップ117)絞り開放命令を交換レンズ2へ送信し、絞り28を開放に戻す。
(ステップ118)クイックリターン主ミラー3及びサブミラー8のミラーダウンを行う。
(ステップ119)ガンマ補正や圧縮処理などの画像補正処理を行う。
(ステップ120)画像補正処理された画像データはLCD19に表示されるとともにメモリカード20に記録され、撮影までの一連の動作は終了する。
交換レンズ2をカメラ本体1に装着したり、カメラ本体1側でメインスイッチがONされると、カメラ本体1から交換レンズ2へシリアル通信がなされ、レンズMPU24は、図7のステップ200から動作を開始する。
(ステップ200)レンズ制御、像振れ補正制御のための初期設定を行う。
(ステップ201)不図示のスイッチ類の状態検出、ズーム・フォーカスの位置検出を行う。スイッチ類は例えば、オートフォーカスとマニュアルフォーカスの切り換えスイッチや、像振れ補正機能のON/OFFスイッチなどがある。
(ステップ202)カメラからフォーカス駆動命令通信があったかどうかを判定する。フォーカス駆動命令が受信されていればステップ203へ、受信されていなければステップ207へ進む。
(ステップ204)目標パルス数Pに達したかどうかの判定を行う。目標に達していればステップ205へ、達していなければステップ206へ進む。
(ステップ205)目標パルス数に達したので、フォーカスレンズの駆動を停止する。
(ステップ206)目標パルス数に達していないので、残り駆動パルス数に応じて、フォーカスレンズ駆動用モータ29の速度設定を行う。残り駆動パルス数が少なくなっていくにしたがって減速していく。
(ステップ208)カメラから全駆動停止(レンズ内のアクチュエータの全駆動を停止する)命令を受信したかどうかの判定を行う。カメラ側で何も操作がなされないと、しばらくしてからカメラからこの全駆動停止命令が送信される。
(ステップ209)全駆動停止制御を行う。ここでは全アクチュエータ駆動を停止し、マイコンをスリープ(停止)状態にする。像振れ補正装置への給電も停止する。その後、カメラ側で何か操作が行われると、カメラはレンズに通信を送り、スリープ状態を解除する。
シリアル通信割込み処理は、通信データのデコードを行いデコード結果に応じて、例えば絞り駆動、フォーカスレンズ駆動などのレンズ処理を行う。そして、通信データのデコードによって、SW1ON、SW2ON、シャッター速度、カメラの機種等も判別できる。
また、像振れ補正割込みは一定周期毎に発生するタイマー割り込みであり、ピッチ方向(縦方向)制御とヨー方向(横方向)の像振れ補正制御を行っている。
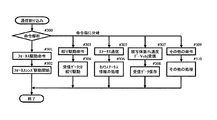
レンズ2はカメラ1からの通信を受信するとステップ300から動作を開始する。
ステップ300でカメラからの命令(コマンド)解析を行い、各命令に応じた処理へ分岐する。
ステップ301では、フォーカス駆動命令を受信したので、ステップ302に進む。ステップ302では、目標駆動パルス数に応じて、フォーカスレンズ駆動用モータ30の速度設定を行い、フォーカスレンズ駆動を開始する。
ステップ303では、絞り駆動命令を受信したので、送信されてきた絞り駆動データをもとに絞り28を駆動するため、ステップ304に進む。ステップ304では、ステッピングモータ38の駆動パターンを設定し、設定した駆動パターンを絞り制御回路37を介してステッピングモータ38に出力し、絞り28を駆動する。
ステップ305では、カメラレンズステータス通信を受信したので、ステップ306に進む。ステップ306で、レンズの焦点距離情報やIS動作状態などをカメラに送信したり、カメラのステータス状態(レリーズスイッチの状態、撮影モード、シャッター速度など)を受信する。
ステップ307では、被写体振れ速度データ受信命令を受信したので、ステップ308に進む。ステップ308では、受信した被写体振れ速度データVobjをレンズMPU24内のRAMに格納する。
ステップ309は、その他の命令、例えばレンズのフォーカス敏感度データ通信や、レンズ光学データ通信などを受信した場合であり、ステップ310でそれらの処理を行う。
レンズのメイン動作中に像振れ補正割り込みが発生すると、レンズMPU24は図9のステップ400から像振れ補正の制御を開始する。
(ステップ400)角速度センサ35の信号が信号処理回路36で処理された出力信号をA/D変換する。A/D変換結果はWadとする。
(ステップ401)スイッチ39の状態を判別して、流し撮りモードであるか、通常防振モードであるかを判定する。通常防振モードであるならステップ402へ進み、流し撮りモードであればステップ405へ進む。
(ステップ402)低周波成分をカットするためハイパスフィルタ演算を行う。演算開始から所定時間はハイパスフィルタの時定数切り換えを行い、早急に信号が安定するための動作も行う。
(ステップ403)ハイパスフィルタの演算結果を入力として積分演算を行う。この結果は角変位データである。
(ステップ404)ズーム位置、フォーカス位置に応じた防振敏感度を読み出し、振れ補正レンズ27の目標駆動量SFTDRVを算出する。
(ステップ406)振れ補正レンズ27の目標駆動量SFTDRVに0を設定する。これは補正レンズ27を電気的に中心保持状態にするためである。
(ステップ407)角速度センサA/D変換結果Wadとカメラから受信した被写体振れ速度データVobjから、移動する被写体を正確に追従するための角速度Wobjを前述のように算出する。ここで、角速度センサ出力Wadは前述の式(3)のωに、被写体振れ速度データVobjは式(3)のVaに、角速度Wobjは式(3)のω0に相当する。
(ステップ408)SW2ON、つまり撮影者が露光動作を選択したので、変動角速度ΔWを算出する。変動角速度ΔWは式(3)のωaに相当する。
(ステップ409)変動角速度ΔWを積分し、変動角変位データを得る。
(ステップ410)ズーム位置、フォーカス位置に応じた防振敏感度を読み出し、振れ補正レンズ27の目標駆動量SFTDRVを算出する。このように、変動角速度ΔWから算出されたに目標駆動量SFTDRVに応じて振れ補正レンズ27を駆動することで、被写体振れをキャンセルするように動作するので、流し撮り時の被写体振れが無くなり、きれいな流し撮り写真を撮影することが可能となる。
(ステップ412)フィードバック演算(SFTDRV−SFTPST)を行う。演算結果はレンズMPU24内のSFT_DTで設定されるRAM領域に格納する。
(ステップ413)ループゲインLPG_DTとステップ412の演算結果SFT_DTを乗算する。演算結果はレンズMPU24内のSFT_PWMで設定されるRAM領域に格納する。
(ステップ414)安定な制御系にするために位相補償演算を行う。
(ステップ415)ステップ414の演算結果をPWMとしてレンズMPU24のポートに出力し、像振れ補正割込みを終了する。その出力はIS制御回路32内のドライバー回路に入力し、リニアモータ33によって像振れ補正レンズ27が駆動され、像振れ補正が行われる。
これにより、撮影者は、主被写体の振れがなく背景が流れているきれいな流し撮り写真を容易に撮影することが可能となる。
例えば、本実施例では、被写体振れ速度の検出をカメラの測距手段により行った例を示したが、クイックリターンミラーや光学ファインダ等が無く、電子ビューファインダで被写体像を観察するカメラでも同様の効果が得られる。この場合、撮像部12により得られる被写体像から動きベクトルを検出することにより、被写体振れ速度を検出することができる。
Claims (5)
- 本体または撮影レンズに加わる振れを検出する第1の振れ検出手段と、
前記撮影レンズを通過した被写体像の焦点状態を検出する焦点検出手段と、
前記焦点検出手段の検出信号から被写体像の振れを検出する第2の振れ検出手段と、
前記撮影レンズの光軸を偏心させる光軸偏心手段と、
撮影準備中に、前記第1の振れ検出手段の検出結果に基づいて得られた前記本体または撮影レンズの角速度と前記第2の振れ検出手段の検出結果に基づいて得られた前記焦点検出手段上における前記被写体像の角速度とに基づいて前記被写体に追従するための流し撮り角速度を算出し、露光中に、前記露光中に前記第1の振れ検出手段の検出結果に基づいて得られた前記本体または撮影レンズの角速度と前記撮影準備中に算出された前記流し撮り角速度との差を算出する信号処理手段と、
前記露光中に、前記算出された差に基づいて前記光軸偏心手段を偏心させる光軸偏心制御手段と、を有し、
前記本体は一眼レフカメラであり、ミラーの駆動によって、露光準備中は前記焦点検出手段による被写体像の検出が可能であり、露光中は前記焦点検出手段による被写体像の検出が不能であることを特徴とする撮像装置。 - 前記信号処理手段は、前記第1の振れ検出手段の検出結果に基づいて得られた前記本体または撮影レンズの角速度と前記第2の振れ検出手段の検出結果に基づいて得られた前記焦点検出手段上における前記被写体像の角速度との差分により前記流し撮り角速度を算出することを特徴とする請求項1に記載の撮像装置。
- 前記信号処理手段は、前記第2の振れ検出手段の検出結果に加え、前記撮影レンズの焦点距離情報と測距された被写体距離情報とから前記焦点検出手段上における前記被写体像の角速度を算出することを特徴とする請求項2に記載の撮像装置。
- 前記第1の振れ検出手段は、回転振れ検出手段であることを特徴とする請求項1〜3のいずれか1つに記載の撮像装置。
- 前記光軸偏心手段は、前記撮影レンズの光軸を偏心させるためのレンズを含み、
前記光軸偏心制御手段は、露光準備中は前記レンズの中心が前記撮影レンズの光軸に位置するように保持することを特徴とする請求項1〜4のいずれか1つに記載の撮像装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005331425A JP4769553B2 (ja) | 2005-11-16 | 2005-11-16 | 撮像装置 |
| US11/549,507 US7639932B2 (en) | 2005-11-16 | 2006-10-13 | Imaging apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005331425A JP4769553B2 (ja) | 2005-11-16 | 2005-11-16 | 撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007139952A JP2007139952A (ja) | 2007-06-07 |
| JP2007139952A5 JP2007139952A5 (ja) | 2008-12-25 |
| JP4769553B2 true JP4769553B2 (ja) | 2011-09-07 |
Family
ID=38040913
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005331425A Expired - Fee Related JP4769553B2 (ja) | 2005-11-16 | 2005-11-16 | 撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7639932B2 (ja) |
| JP (1) | JP4769553B2 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2007097287A1 (ja) * | 2006-02-20 | 2009-07-16 | パナソニック株式会社 | 撮像装置及びレンズ鏡筒 |
| JP4823179B2 (ja) * | 2006-10-24 | 2011-11-24 | 三洋電機株式会社 | 撮像装置及び撮影制御方法 |
| JP4789789B2 (ja) * | 2006-12-12 | 2011-10-12 | キヤノン株式会社 | 撮像装置 |
| JP5061188B2 (ja) | 2007-07-09 | 2012-10-31 | パナソニック株式会社 | デジタル一眼レフカメラ |
| US7929847B2 (en) * | 2008-06-18 | 2011-04-19 | Sanwa Technologies Limited | User-configurable waterproof camera case |
| US9497388B2 (en) * | 2010-12-17 | 2016-11-15 | Pelco, Inc. | Zooming factor computation |
| CN103376088B (zh) * | 2012-04-21 | 2016-08-17 | 鲍鹏飞 | 瞭望塔测距摆动误差修正方法 |
| CN103376089A (zh) * | 2012-04-24 | 2013-10-30 | 鲍鹏飞 | 瞭望塔测距摆动误差修正方法 |
| JP6214316B2 (ja) * | 2013-10-09 | 2017-10-18 | キヤノン株式会社 | 像ブレ補正装置、レンズ装置、撮像装置、像ブレ補正装置の制御方法、プログラム、および、記憶媒体 |
| JP6246015B2 (ja) * | 2014-02-19 | 2017-12-13 | キヤノン株式会社 | 画像処理装置およびその制御方法 |
| JP6338424B2 (ja) * | 2014-04-03 | 2018-06-06 | キヤノン株式会社 | 画像処理装置およびその制御方法、撮像装置、プログラム |
| US9692973B2 (en) * | 2014-12-08 | 2017-06-27 | Canon Kabushiki Kaisha | Image capturing apparatus and control method therefor |
| JP6584280B2 (ja) * | 2014-12-08 | 2019-10-02 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP6429633B2 (ja) * | 2015-01-09 | 2018-11-28 | キヤノン株式会社 | 像ブレ補正装置、制御方法、光学機器、撮像装置 |
| JP6711608B2 (ja) * | 2015-01-16 | 2020-06-17 | キヤノン株式会社 | 制御装置、および、レンズ装置 |
| US9900513B2 (en) | 2015-01-16 | 2018-02-20 | Canon Kabushiki Kaisha | Control apparatus, optical apparatus, and lens apparatus |
| JP6539091B2 (ja) * | 2015-04-09 | 2019-07-03 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP6525724B2 (ja) * | 2015-05-20 | 2019-06-05 | キヤノン株式会社 | パンニング情報表示装置、パンニング情報の表示処理を実行する方法およびパンニング情報表示プログラム |
| JP6598549B2 (ja) * | 2015-07-23 | 2019-10-30 | キヤノン株式会社 | 画像処理装置およびその制御方法、撮像装置およびその制御方法 |
| JP6581474B2 (ja) * | 2015-11-11 | 2019-09-25 | キヤノン株式会社 | 像振れ補正装置及びその制御方法、プログラム、記憶媒体 |
| JP6643159B2 (ja) * | 2016-03-23 | 2020-02-12 | キヤノン株式会社 | レンズ装置、制御装置、及びそれらの制御方法 |
| US11202011B2 (en) * | 2016-07-25 | 2021-12-14 | Canon Kabushiki Kaisha | Control apparatus, image capturing apparatus, lens apparatus, image capturing system, control method, and storage medium |
| JP6745682B2 (ja) * | 2016-08-30 | 2020-08-26 | キヤノン株式会社 | 撮像装置、制御方法、プログラム、及び記憶媒体 |
| JP6720070B2 (ja) * | 2016-12-16 | 2020-07-08 | キヤノン株式会社 | 撮像装置及びその制御方法、プログラム |
| JP2018146672A (ja) * | 2017-03-02 | 2018-09-20 | キヤノン株式会社 | 撮像装置およびその制御方法、外付け装置 |
| JP6942534B2 (ja) * | 2017-06-26 | 2021-09-29 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| JP7443005B2 (ja) * | 2019-09-18 | 2024-03-05 | キヤノン株式会社 | 画像処理装置、撮像装置および制御方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60166910A (ja) | 1984-02-09 | 1985-08-30 | Canon Inc | カメラのぶれ検知装置 |
| JPS6383621A (ja) | 1986-09-29 | 1988-04-14 | Canon Inc | ぶれ検知装置 |
| JPS6486766A (en) | 1987-09-29 | 1989-03-31 | Matsushita Electric Ind Co Ltd | Photographing apparatus |
| JP2925150B2 (ja) | 1988-12-06 | 1999-07-28 | キヤノン株式会社 | 像移動防止装置 |
| JPH04163535A (ja) * | 1990-10-29 | 1992-06-09 | Olympus Optical Co Ltd | カメラのブレ防止装置 |
| JPH07218967A (ja) | 1994-01-28 | 1995-08-18 | Canon Inc | 防振装置 |
| US6047133A (en) * | 1993-03-26 | 2000-04-04 | Canon Kabushiki Kaisha | Image blur prevention apparatus |
| JPH0798471A (ja) * | 1993-09-28 | 1995-04-11 | Canon Inc | カメラ |
| JP3359138B2 (ja) | 1993-12-28 | 2002-12-24 | キヤノン株式会社 | カメラシステム、像振れ補正システム及び像振れ補正装置 |
| JPH0946574A (ja) | 1995-07-26 | 1997-02-14 | Matsushita Electric Ind Co Ltd | 画像動き補正装置 |
| JPH10148858A (ja) * | 1996-11-19 | 1998-06-02 | Canon Inc | 防振制御装置 |
| US6097896A (en) * | 1997-08-25 | 2000-08-01 | Nikon Corporation | Motion compensation system having motion detection signal correction |
| JP3466895B2 (ja) | 1997-12-12 | 2003-11-17 | キヤノン株式会社 | 振れ補正装置、撮像装置、撮像システム、カメラユニット、及びレンズユニット |
| US6810207B2 (en) * | 2002-05-13 | 2004-10-26 | Olympus Corporation | Camera |
| JP2004301939A (ja) * | 2003-03-28 | 2004-10-28 | Sony Corp | カメラシステム、カメラ及び交換レンズ |
| JP4315341B2 (ja) * | 2004-08-03 | 2009-08-19 | 富士フイルム株式会社 | 流し撮り方法および撮影装置 |
| JP2006246354A (ja) * | 2005-03-07 | 2006-09-14 | Casio Comput Co Ltd | 撮影装置及び撮影プログラム |
| JP2006317848A (ja) * | 2005-05-16 | 2006-11-24 | Canon Inc | 静止画撮像装置 |
| JP2007096828A (ja) * | 2005-09-29 | 2007-04-12 | Matsushita Electric Ind Co Ltd | 撮像装置 |
-
2005
- 2005-11-16 JP JP2005331425A patent/JP4769553B2/ja not_active Expired - Fee Related
-
2006
- 2006-10-13 US US11/549,507 patent/US7639932B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7639932B2 (en) | 2009-12-29 |
| US20070110418A1 (en) | 2007-05-17 |
| JP2007139952A (ja) | 2007-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4769553B2 (ja) | 撮像装置 | |
| JP4667052B2 (ja) | 撮像装置並びにそのカメラ本体及び交換レンズ | |
| JP4272863B2 (ja) | カメラおよびカメラシステム | |
| JP4522207B2 (ja) | カメラシステム、カメラ本体及び交換レンズ | |
| JP5919543B2 (ja) | デジタルカメラ | |
| US7907205B2 (en) | Optical apparatus with unit for correcting blur of captured image caused by displacement of optical apparatus in optical-axis direction | |
| US7693406B2 (en) | Image capturing apparatus, method of controlling the same, and storage medium | |
| JP2007128077A (ja) | デジタル撮像システムでの自動焦点を改善するシステムおよび方法 | |
| JP2009216743A (ja) | 像振れ補正カメラ | |
| JP2007147803A (ja) | 撮像装置、制御方法および制御プログラム | |
| JP2007041206A (ja) | 撮影装置 | |
| JP2006126667A (ja) | カメラシステム、カメラおよび交換レンズ | |
| JP2008209849A (ja) | 撮像装置および一眼レフレックスカメラ | |
| JP2019095630A (ja) | 像振れ補正装置を有する光学機器 | |
| JP2018194770A (ja) | カメラシステム、交換レンズおよびカメラ | |
| JP2010145493A (ja) | カメラシステム | |
| JP2015197562A (ja) | 光学機器、光学機器を備えた撮像装置、光学機器の制御方法 | |
| JP2009015184A (ja) | 撮像装置 | |
| JP2010085440A (ja) | 撮影装置及びカメラシステム | |
| JP2016213648A (ja) | 撮像装置、レンズ装置、撮像装置の制御方法、およびレンズ装置の制御方法 | |
| JP2011112731A (ja) | 撮像装置 | |
| JP2019045701A (ja) | 像ブレ補正装置を有する光学機器 | |
| JP2016086210A (ja) | 像ぶれ補正装置を有する光学機器、カメラシステム | |
| JP2016191762A (ja) | カメラシステム、交換レンズおよびカメラ | |
| JP2006033578A (ja) | 光学機器補正装置及びシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081111 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081111 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20090406 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100201 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110209 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110329 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110527 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110614 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110620 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4769553 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140624 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |