JP4590114B2 - 座標入力装置及びその制御方法、記録媒体 - Google Patents
座標入力装置及びその制御方法、記録媒体 Download PDFInfo
- Publication number
- JP4590114B2 JP4590114B2 JP2001032290A JP2001032290A JP4590114B2 JP 4590114 B2 JP4590114 B2 JP 4590114B2 JP 2001032290 A JP2001032290 A JP 2001032290A JP 2001032290 A JP2001032290 A JP 2001032290A JP 4590114 B2 JP4590114 B2 JP 4590114B2
- Authority
- JP
- Japan
- Prior art keywords
- axis
- coordinate
- coordinate value
- comparison
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/041—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means
- G06F3/043—Digitisers, e.g. for touch screens or touch pads, characterised by the transducing means using propagating acoustic waves
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a 3D space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0354—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of 2D relative movements between the device, or an operating part thereof, and a plane or surface, e.g. 2D mice, trackballs, pens or pucks
- G06F3/03545—Pens or stylus
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V30/00—Character recognition; Recognising digital ink; Document-oriented image-based pattern recognition
- G06V30/10—Character recognition
- G06V30/22—Character recognition characterised by the type of writing
- G06V30/228—Character recognition characterised by the type of writing of three-dimensional handwriting, e.g. writing in the air
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Human Computer Interaction (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- Acoustics & Sound (AREA)
- Position Input By Displaying (AREA)
Description
本発明は、座標入力装置及びその制御方法、記録媒体に関するものである。
【0002】
【従来の技術】
従来、CRTディスプレイ、液晶ディスプレイ(LCD)、あるいはプロジェクタ等の表示装置の表示面に、座標を入力することができる座標入力装置を重ねて配置し、操作者が行ったポインティングあるいは筆記による筆跡を表示装置に表示し、あたかも、紙と鉛筆のような関係を実現することができる装置が知られている。
【0003】
座標入力装置としては、抵抗膜方式をはじめ、静電方式、ガラス等の座標入力面に超音波を伝播させる超音波方式等の透明な入力板を有する方式や、光学方式、あるいは空中に音波を放射することで位置を検出する方式、さらには電磁誘導(電磁授受)方式のように表示装置の裏側に座標算出のための機構を配置し、表示装置の前面に透明な保護板を配置して、入出力一体の情報機器を構成している物もある。
【0004】
このような情報機器は、携帯性を有する小型の電子手帳に始まり、表示装置の大型化に伴って、比較的大きなサイズのペン入力コンピュータ等の情報機器も見られるようになった。その他、フロントプロジェクタ、リアプロジェクタ、あるいはPDP等の大型表示装置と組み合わせて、例えば、プレゼンテーション装置、TV会議システム等に利用され始めている。また、大型の液晶ディスプレイやPDPディスプレイ等の表示装置は、現在も画質の改善、低コスト化が進められている他、衛星放送等のデジタル化に伴い、テレビの仕様形態も過渡期の状態に入りつつある。
【0005】
また、これらの大型の表示装置は、例えば、オフィスにおいて使われていたホワイトボード、あるいは電子黒板にとって変わり、パーソナルコンピュータ内にあらかじめ用意した資料用データを大型の表示装置に表示させることで、会議用途、打ち合わせ用途に使われ始めている。その場合、大型の表示装置に表示された情報は、ホワイトボードの如く、操作者、あるいは出席者により表示情報を更新するために、直接画面をタッチすることで、パーソナルコンピュータを制御して、例えば、表示画面の表示内容を切り替えることができるように構成されている。
【0008】
【発明が解決しようとする課題】
しかしながら、この種の座標入力装置において、この種の大型の入出力一体のシステムを考慮した場合、大勢の参加者を想定した打ち合わせあるいはネットワーク時代を考慮すれば、操作者が直接画面をタッチすることでパーソナルコンピュータを制御するばかりでなく、例えば、質問者がその場で遠隔操作により、画面を操作したり、必要に応じてネットワークより情報を引き出せるような構成になるのが好ましい形態であると言える。
【0009】
本発明は上記の課題を解決するためになされたものであり、近接入力及び遠隔入力により座標を入力できる座標入力装置及びその制御方法、記録媒体を提供することを目的とする。
【0010】
【課題を解決するための手段】
上記の目的を達成するための本発明による座標入力装置は以下の構成を備える。即ち、 指示具に対する前記X軸、前記Y軸、前記Z軸の座標値を検出する検出手段と、
前記Z軸の座標値を所定値と比較する比較手段と、
前記比較手段の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、第1の時点で検出された第1のX軸の座標値及び第1のY軸の座標値を記憶する記憶手段と、
前記比較手段の比較結果に基づいて、前記X軸及びY軸の座標値の出力を制御する制御手段とを備え、
前記制御手段は、
前記比較手段の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、前記第1の時点以降の第2の時点に検出される第2のX軸の座標値と前記記憶手段に記憶されている前記第1のX軸の座標値の差分、及び、前記第2の時点に検出される第2のY軸の座標値と前記記憶手段に記憶されている前記第1のY軸の座標値の差分を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力し、
前記比較手段の比較の結果、前記Z軸の座標値が前記所定値以下である場合、前記第1の時点で検出された第1のX軸の座標値、及び、前記第1の時点で検出された第1のY軸の座標値を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力する。
【0018】
【発明の実施の形態】
以下、図面を参照して本発明の好適な実施形態を詳細に説明する。
【0019】
図1は本発明の3次元(空間)座標計測可能な座標入力装置の概略構成を示す図である。
【0020】
4は筆記具であるところの座標入力ペンであり、操作者による座標入力動作により空中に音波を発生するように構成されている。発生した音波は複数の検出センサ3(実施形態1の場合、4個の検出センサ3_Sa〜Sdを使用する)により検出され、後述する方法により信号波形検出回路2で処理される。その後、演算制御回路1によって、座標入力ペン4の音波発生源の位置(X,Y,Z)を算出するように構成されている。
【0021】
演算制御回路1は、座標入力装置全体を制御するとともに、得られる座標データを基に、ディスプレイ駆動回路5を介して、表示装置6に表示されているカーソルを移動したり、あるいは筆記等の手書き情報を表示装置6に表示、追記できるように構成されている。
【0022】
以上のように、座標入力装置と表示装置を組み合わせることで、あたかも『紙と鉛筆』のような関係を実現することができるマンマシンインターフェースを提供することが可能となる。
【0023】
次に、座標入力ペン4の構成について、図2を用いて説明する。
【0024】
図2は本発明の座標入力ペンの構成を示す図である。
【0025】
座標入力ペン4内に内蔵された音波発生源43は、ペン電源45、およびタイマと発振回路並びに座標入力ペン4に具備されている複数のスイッチ情報を検知して制御する制御回路等で構成された駆動回路44によって駆動される。音波発生源43の駆動信号は、タイマによって発せられる所定の周期で繰り返すパルス信号であって、発振回路により所定のゲインで増幅された後、音波発生源43に印加される。この電気的な駆動信号は、音波発生源43によって機械的な振動に変換され、空中にそのエネルギーが放射されることになる。
【0026】
尚、実施形態1における座標入力ペン4は、そのペン先端部を押圧することで動作するペン先スイッチ(SW)41、並びに座標入力ペン4の筐体に設けられた複数のペンサイドスイッチ(SW)42を具備する。
【0027】
駆動回路44は、所定周期毎(例えば、10msec毎、その場合、1秒間あたりに音波を100回放射するので、本座標入力装置の座標出力サンプリングレートは、100回/秒となる)に、座標入力ペン4内の音波発生源43を駆動させる信号を出力し、空中に音波を放射することになる。この音波は、音波発生源43と各検出センサ3_Sa〜Sd迄の距離に各々応じて遅延し、到達、検出されることになる。この種の座標入力装置は、座標入力ペン4の音波発生源43と各検出センサ3_Sa〜Sd間の距離を、音波の既知の音速と、その到達時間の積により各々導出し、各検出センサ3_Sa〜Sdの位置情報を用いて幾何学的に音波発生源43の位置情報を得ることを基本としたシステムである。そこで、この音波の到達時間を検出する方法について、図3、図4を用いて説明する。
【0028】
図3は本発明の音波の到達時間検出方法を説明するためのタイミングチャートであり、図4は本発明の音波の到達時間検出を実現する回路のブロック図である。
【0029】
尚、本発明では、音波の到達時間検出方法として、3種類の実施形態1〜3を用いて説明する。
【0030】
実施形態1において、51は駆動回路44で発生した駆動信号であり、駆動信号51を発生するとともにスタート信号を生成する。このスタート信号は、例えば、座標入力ペン4内に内蔵されている赤外LED等(不図示)を介して、そのスタート信号を演算制御回路1に送信し、演算制御回路1内のタイマ12(図5参照)をスタートさせる。
【0031】
一方、空中に放射された音波は、音波発生源43と検出センサ3_Sa〜Sd間の距離に応じて遅延し、検出センサ3_Sa〜Sdで検出されることになる。53は前置増幅回路60で所定レベルまで増幅された検出センサ3_Sa〜Sdで検出された検出信号を示す。この検出信号を絶対値回路及び低域通過フィルタ等により構成されるエンベロープ検出回路61で処理を行い、検出信号のエンベロープ54のみが取り出される。
【0032】
このエンベロープ54に着目すると、その波形が伝播する音速は群速度Vgであり、このエンベロープ54の特異な点、例えば、エンベロープ54のピークや変曲点を検出すると、群速度Vgに関わる遅延時間tgが得られる。エンベロープ54のピークあるいは変曲点を検出するエンベロープ特異点検出回路62は、微分回路、ゼロクロスコンパレータを用いて容易に検出が可能であり、実施形態1では、2階微分することによって信号55を形成し、閾値レベル52と信号53で比較されたゲート信号を参照してエンベロープ54の変曲点を検出する(信号56)。この信号56を用いて前述したスタート信号により動作しているタイマ12をストップさせれば、群速度Vgに関わる群遅延時間Tgを検出することが可能である。(尚、図4のブロック図には、この群遅延時間Tgを検出する構成は不図示である。)
【0033】
また、厳密に言えば、この群遅延時間Tgには、波形処理に関わる回路の遅延分が含まれるが、後述する方法により、その影響は完全に除去される。よって、ここでは説明を簡略化するために、回路遅延時間は無いものとして説明を加える。
【0034】
以上のことから、音波発生源43と検出センサ3_Sa〜Sd間の距離Lは次式で求めることができる。
【0035】
L=Vg×Tg (1)
一方、より高精度な距離Lの計算を行うための実施形態2では、検出信号波形の位相情報より、音波が到達する時間を導出する。その詳細について説明すれば、検出センサ3_Sa〜Sdの出力信号53は、帯域通過フィルタ64により余分な周波数成分を除いた後、Tp信号検出回路66に入力される。Tp信号検出回路66は、ゼロクロスコンパレータ、マルチバイブレータ等で構成され、帯域通過フィルタ64によって出力された信号のゼロクロス点に関わる信号を、所定の閾値レベルと比較するゲート信号発生回路65が生成するゲート信号57と比較し、信号58を生成する。
【0036】
その後に、前述した群遅延時間Tgを検出する信号56をゲート信号(ゲート信号発生回路63が生成)として参照し、このゲート信号56の期間内において、帯域通過フィルタ64で出力される信号波形の位相が、例えば、負側から正側にクロスする最初のゼロクロス点を出力する信号59を生成する。
【0037】
同様にして、この信号59を用いて前述したスタート信号により動作しているタイマ12をストップさせれば、位相速度Vpに関わる位相延時間Tpを検出することが可能である
尚、厳密にいえば、この群遅延時間Tpには、波形処理に関わる回路の遅延分が含まれるが、後述する方法により、その影響は完全に除去される。よって、ここでは説明を簡略化するために、回路遅延時間は無いものとして説明を加える。
【0038】
以上のことから、音波発生源43と検出センサ3_Sa〜Sd間の距離Lは次式で求めることができる。
【0039】
L=Vp×Tp (2)
ここで、エンベロープ特異点検出回路62に基づきゲート信号発生回路63で生成するゲート信号56を用いる効果について説明する。
【0040】
検出センサ3_Sa〜Sdによって検出される信号レベルは、次の要因によって変動する。
【0041】
1) 音波発生源43、検出センサ3_Sa〜Sdの電気−機械変換効率
2) 音波発生源43と検出センサ3_Sa〜Sd間の距離
3) 音波が伝播する空中の温度、湿度等の環境変動
4) 音波発生源43の音波放射に関する指向性、並びに検出センサ3_Sa〜Sdの感度指向性
項目1)は部品公差により発生する要因であり、装置を大量生産する場合には十分な留意が必要である。また、項目2)は音波の減衰に関する項目であり、音波発生源43と検出センサ3_Sa〜Sd間の距離が大きくなるにつれて、空気中を伝播する音波の信号レベルは指数関数的に減衰することが一般的によく知られている他、その減衰定数も項目3)による環境で変化する。さらには、項目4)は、本発明は座標入力装置として動作するので、筆記具であるところの座標入力ペン4は、操作者による筆記動作で常にその姿勢が変化、つまり、ペン保持角度が変動するので、その変動によっても大きくレベルが変化する。さらには、検出センサ3_Sa〜Sdの感度指向性により、座標入力ペン4と検出センサ3_Sa〜Sdの成す角度が変動しても検出レベルが変動する。この時、例えば、検出レベルがより小さくなったと仮定した場合には、前述した閾値レベル(例えば、信号52)が固定であるために、信号58が信号58'に変化することは十分に有り得る現象となる。つまり、たとえ同一地点での座標入力動作を行っても、例えば、座標入力ペン4の保持角度(向き)が異なれば、検出信号53のレベルが異なることになるので、ゲート信号57の発生する時間がそれに依存することになる。しかしながら、本発明はエンベロープ54の特異点に基づくゲート信号56を参照しているので、検出信号レベルに依存することなく、安定して信号59を得ることが可能となっている。
【0042】
次に、本発明の演算制御回路1の概略構成について、図5を用いて説明する。
【0043】
図5は本発明の演算制御回路の概略構成を示すブロック図である。
【0044】
11は演算制御回路1及び本座標入力装置全体を制御するマイクロコンピュータであり、内部カウンタ、操作手順を記憶したROM、そして計算等に使用するRAM、定数等を記憶する不揮発性メモリ等によって構成されている。前述した通り、駆動回路44により座標入力ペン4内の音波発生源43の駆動タイミングと同期したスタート信号が、座標入力ペン4に内蔵された赤外LED等(不図示)により光信号として放射され、その信号をスタート信号検出回路17で検波することによって、演算制御回路1内のタイマ12(例えば、カウンタなどにより構成されている)をスタートさせる。
【0045】
このように構成することで、座標入力ペン4内の音波発生源43を駆動する駆動タイミングと、演算制御回路1内のタイマ12との同期が得られるので、音波発生源43で発生した音波が各検出センサ3_Sa〜Sd各々に到達するのに要する時間を測定することが可能となる。
【0046】
信号波形検出回路2より出力される各検出センサ3_Sa〜Sdよりの振動到達タイミング信号(実施形態1における信号56、もしくは実施形態2における信号59)は、検出信号入力ポート13を介してラッチ回路15_a〜dに各々入力される。ラッチ回路15_a〜dの各々は、対応する検出センサ3_Sa〜Sdよりの振動到達タイミング信号を受信すると、その時のタイマ12の計時値をラッチする。
【0047】
このようにして座標検出に必要な全ての検出信号の受信がなされたことを判定回路14が判定すると、マイクロコンピュータ11にその旨の信号を出力する。マイクロコンピュータ11がこの判定回路14からの信号を受信すると、ラッチ回路15_a〜dから各々の検出センサ3_Sa〜Sdまでの振動到達時間をラッチ回路15_a〜dより読み取り、所定の計算を行なって、座標入力ペン4の座標位置を算出する。その結果を、I/Oポート16を介してディスプレイ駆動回路5に出力し、表示装置6の対応する位置に、例えば、ドット等を表示することができる。また、I/Oポート16を介してインタフェース回路(不図示)に、座標位置情報を出力することによって、外部機器に座標値を出力することができる。
【0048】
一方、実施形態3としては、前述のごとく検出信号レベルの大小に依存せず、精度良く距離Lを求める方法について説明する。
【0049】
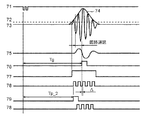
図6、図7を用いて説明すると、71は駆動回路44で発生した駆動信号であり、駆動信号71を発生するとともにスタート信号を生成する。このスタート信号は、例えば、座標入力ペン4内に内蔵されている赤外LED等(不図示)を介して、その信号を演算制御回路1に送信し、演算制御回路1内のタイマ12をスタートさせる。
【0050】
一方、空中に放射された音波は、音波発生源43と検出センサ3_Sa〜Sd間の距離に応じて遅延し、検出センサ3_Sa〜Sdで検出されることになる。73は前置増幅回路80で所定レベルまで増幅された検出センサ3_Sa〜Sdで検出された検出信号を示す。この検出信号を、絶対値回路及び低域通過フィルタ等により構成されるエンベロープ検出回路81で処理を行い、検出信号のエンベロープ74のみが取り出される。
【0051】
このエンベロープ74に着目すると、その波形が伝播する音速は群速度Vgであり、このエンベロープ74の特異な点、例えば、エンベロープ74のピークや変曲点を検出すると、群速度Vgに関わる遅延時間tgが得られる。エンベロープ74のピークあるいは変曲点を検出するエンベロープ特異点検出回路82は、微分回路、ゼロクロスコンパレータを用いて容易に検出が可能であり、実施形態3では、2階微分することによって信号75を形成し、閾値レベル72と信号73で比較されたゲート信号を参照してエンベロープ74の変曲点を検出する(信号76)。この信号76を用いて前述したスタート信号により動作しているタイマ12をストップさせれば、群速度Vgに関わる群遅延時間Tgを検出することが可能である
尚、実施形態1、2と同様に、この群遅延時間Tgには、波形処理に関わる回路の遅延分が含まれるが、説明を簡略化するために、回路遅延時間は無いものとして説明を加える。
【0052】
以上のことから、音波発生源43と検出センサ3_Sa〜Sd間の距離Lは(1)式で求めることができる。
【0053】
一方、検出センサ3_Sa〜Sdの出力信号73は、帯域通過フィルタ84により余分な周波数成分を除いた後、Tp信号検出回路86に入力される。Tp信号検出回路86は、ゼロクロスコンパレータ、マルチバイブレータ等で構成され、帯域通過フィルタ84によって出力された信号のゼロクロス点に関わる信号を、所定の閾値レベルと比較するゲート信号発生回路85が生成するゲート信号77と比較し、信号78を生成する。
【0054】
その後に、帯域通過フィルタ84で出力される信号波形の位相が、例えば、負側から正側にクロスする最初のゼロクロス点を出力する信号79を生成する。同様にして、この信号79を用いて前述したスタート信号により動作しているタイマ12をストップさせれば、位相速度Vpに関わる位相延時間Tp_2を検出することが可能である。
【0055】
しかしながら、この信号79は、前述したとおり信号73の信号レベルによって変化する。例えば、信号レベルがより低下した場合には、固定閾値で比較されるゲート信号のために、ゲート信号発生位置が変化し、例えば、信号78'となる。しかしながら、この位相遅延時間Tp_2と実施形態1で求められたTp信号の差分は、検出信号波形73の位相周期の整数倍であって、必ず以下の関係が成立する。
【0056】
Tp=Tp_2+n×T (3)
ここで、nは整数、Tは検出信号波形の位相周期であり、既知の値である。式(3)を式(2)に代入し、式(1)を用いれば
n=Int [ (Vg×Tg−Vp×Tp_2)/λp+0.5 ] (4)
ここで、λpは音波の波長であって、位相速度Vpと周期Tの積に等しい。よって、整数nが既知となり、式(2)、式(3)を用いて距離Lの導出が高精度に可能となる。
【0057】
尚、上述の説明において、図3の信号56と信号59の時間差Δ、および図6の信号76と信号78の時間差Δが存在するが、空中を伝播する音波の群速度Vgと位相速度Vpは等しく、この時間差Δは固定量となる。従って、回路遅延と同様に後述する方法で、その影響は完全に除去されるので、ここでは、Δ=0として説明している。
【0058】
以上説明したように、実施形態1に比べ、実施形態2、3は、信号波形の位相情報より距離を導出しているので、より高精度に距離を計測することができる優れた効果を得ることができる。
【0059】
一方、実施形態2に比べ、実施形態3は、位相遅延時間の検出点が検出信号波形53、73のより先頭部分に位置することにあり、このような構成とすることで、反射波による影響をより軽微なものにすることができる。つまり、図13に示すように、空中に放射された音波は、反射面(図示の場合は座標入力面であるところの表示装置6が存在すると、音波発生源43から直接、検出センサ3に入射する直接波と、反射面を経由して入射する反射波が、直接波と反射波の経路の差分だけ時間的に遅延して、検出されることになる。この反射波の影響を受けない構成とするためには、直接波の信号波形のより前方に、群遅延時間Tg、および位相遅延時間Tpの検出点を設けるのが好ましい。よって、本発明においては、群遅延時間Tgの検出点を特定するために、エンベロープのピーク(1階微分)でなく、より前方に位置する変曲点(2階微分)を検出点としている。さらには、実施形態2よりも実施形態3のほうが位相遅延時間Tpの検出点が、検出信号波形のより先頭部に位置しているので、前述した反射波の影響を受けにくく、より高精度に座標算出を可能とする優れた構成であると言える。さらに、実施形態3の群遅延時間Tgは、先に述べた演算方法により整数nを算出するため(式4)にのみ使用され、かつ式(4)で演算上、整数化(四捨五入相当)を実行することになるので、例えば、反射波の影響による群遅延時間Tgの誤差が検波する信号波形の位相の半周期以内(長さに換算して、半波長以内)であれば、結果に影響することが無い。従って、実施形態3は、より反射波の影響を除去することができる優れた構成であると言える。
【0060】
しかしながら、群遅延時間Tg、位相遅延時間Tpの両者を検出しなければならない実施形態3に比べ、実施形態2は位相遅延時間Tpのみでの検出が可能であり、コスト的にはより有利な構成となっている。従って、どちらの実施形態を採用するかは、目的とする製品形態の仕様によって選択することになる。
【0061】
以上述べた実施形態において、検出された時間には、音波発生源43と各検出センサ3_Sa〜Sdまで音波が到達する時間に加えて、回路等による電気的な処理時間も含まれる。従って、ここでは、音波が伝播する時間以外に余分に計測される時間を除去する方法について説明する。
【0062】
ラッチ回路によってラッチされた群遅延時間Tg、もしくは位相遅延時間Tpには、各々群回路遅延時間etg、位相回路遅延時間etpを含む。この回路遅延時間は、時間計測毎に同一の値を必ず含む。そこで、ある計測回路によって、音波発生源43と検出センサ3間を伝播する際に計測された時間をt*、その計測回路における回路遅延時間をe、実際に音波が音波発生源43と検出センサ3間を伝播したのに要した時間をtとすれば、
t*=t+e (5)
となる。
【0063】
一方、音波発生源43と検出センサ間の距離が既知の距離Liniにおける時間計測値をtini*とし、その計測回路における回路遅延時間をe、実際に音波が伝播した時間をtiniとすれば、
tini*=tini+e (6)
となる。よって、
t*−tini*=t−tini (7)
となる。ここで、音波の音速をVとすれば、

【0064】
よって、求めるべき任意の音波発生源43と検出センサ3間の距離Lは、
L=V×t=V×(t*−tini*)+Lini (9)
となる。
【0065】
上記、既知の距離Lini、及びその距離における時間計測値tini*(実施形態1においては群遅延時間Tgini*、実施形態2においては位相遅延時間Tpini*、実施形態3においてはその両者)を、出荷時等に不揮発性メモリ等の記憶媒体に記憶することによって、任意の距離における音波発生源43と検出センサ3間の距離を精度良く算出することが可能となる。また、前述したように、図3の信号56と信号58の時間差Δ、および図6の信号76と信号78の時間差Δについても固定量(一般に空中を伝播する音波の群速度Vgと位相速度Vpは等しい)であるので、上記の方法によりその影響を除去することが可能である。
【0066】
次に、図8に示すような座標系に検出センサ3_Sa〜Sdが配置された場合、音波発生源43の位置座標(X,Y,Z)を求める方法について説明する。
【0067】
上記の方法により正確に求められた音波発生源43と各検出センサ3_Sa〜Sdまでの距離を各々La〜Ld、X方向の検出センサ間距離をXs-s、Y方向の検出センサ間距離をYs-sとすれば、
【0068】
【0069】
【0070】
以上示したように、少なくとも3個の音波発生源43と検出センサ3までの距離が測定できれば、容易に音波発生源43の位置(空間)座標を求めることが可能となる。本発明では、検出センサを4個用いており、例えば、距離が最も遠い情報を使わず(この場合、検出センサ3で出力される信号は、距離が遠いために信号レベルが最も小さくなっている)、残り3個の距離情報のみで、座標を算出することで、信頼性の高い座標算出を可能としている。
【0071】
また、この距離が遠いセンサの距離情報を活用することで、出力された座標値の信頼性が高いものか判定することも可能である。
【0072】
具体的な方法としては、例えば、距離情報La、Lb、Lcで算出された座標値と、距離情報Lb、Lc、Ldで算出された座標値は同一の値を出力するはずであり(距離情報の組み合わせを変更して演算する)、両者が一致しない場合には、いずれかの距離情報が不正、つまり、誤検出したことになるので、その場合には、座標値を出力しないといった信頼性を向上させる構成も実施可能となる。
【0073】
次に、本発明の空間座標を算出することが可能な座標入力装置の動作モードについて説明する。
【0074】
図9は本発明の座標入力ペンの外観を示す図である。
【0075】
図9に示すように、座標入力ペン4は、ペン先SW41、及び2個のペンサイドSW42_a、42_bを具備してなり、各SWの動作モードについて図10A、図10Bを用いて説明を加える。
【0076】
操作者が、座標入力ペン4を握って座標入力面(この場合、図8に示すように、表示装置6のスクリーン面にXY平面(z=0)が設定されている)を押圧することで、ペン先SW41が動作する。まず、ステップS201で、ペン先SW41がONであるか否かを判定する。ONでない場合(ステップS202でNO)、ステップS203に進む。一方、ONである場合(ステップS202でYES)、ステップS207に進み、第1の所定周期で(例えば、50回/秒)で駆動回路44により音波発生源43が動作し、その第一の所定周期で音波が空中に放射されるように動作する。この時、本発明の座標入力装置によって算出される座標値は、絶対座標値(X、Y、0)であって、その値を直接、外部装置等に出力することで、操作者は筆記動作が可能となる(ペンダウン状態:駆動Mode_1)。
【0077】
一方、ペン先SW41がONでない場合、つまり、OFFの場合は、少なくとも操作者によるXY平面内(z=0)での座標入力が行われていない状態を意味するが、その場合であっても、画面上に表示されているカーソルを移動する等の動作(ペンアップ状態:駆動Mode_2)を行えることが好ましい。この動作を実現するために、本発明の座標入力ペン4には、ペンサイドSW42_a、42_bが設けられている。
【0078】
そして、ステップS203〜ステップS205でそれぞれ、ペンサイドSW42_a、42_bがONであるか否かを判定する。この判定結果に基づいて、少なくともペンサイドSWのどちらか一方がON状態の場合ステップS206に進み、第二の所定周期(駆動Mode_2であって、40回/秒)で音波が空中に放射される。また、入力面から離れていても(z>0)、座標入力ペン4の動きによってカーソルを移動し、その移動状態を記録(筆跡)として残したいような場合には、ペンサイドSW42_a、42_bの両方を押圧することで、ステップS207に進み、第一の所定周期(駆動Mode_1)で音波が空中に放射されるように動作し、ペンダウン状態となる。
【0079】
上述の説明では、駆動モードを判別する手段として音波発生源43が音波を発生するサンプリング周期を計測することによって(図11、信号401)行うが、他の実施形態として、図11における駆動信号402を駆動信号406に変調することで、検出信号波形が403から407となり、例えば、ピークホールド回路等を用いて信号409を生成することで、モードを区別しても良い。また、駆動信号を420のように構成して、放射する音波の周波数を変更し、それを検波(図11の信号422の周期Tを検出)することで、モードを区別することも可能である。さらには、前述したスタートタイミング信号(本実施形態の場合、スタートタイミング信号を座標入力ペン4に内蔵されたLED等により放射する手段を有する)を変調し、演算制御回路1内のスタート信号検出回路17がその情報を検波しても良い。
【0080】
ここで、図13に示すが如く反射波の影響を考慮すれば、図11の駆動信号402であっても、検出信号波形407の波形が検波されることが有る。つまり、検出信号波形407の最初のピークは直接波で構成され、続いて直接波と反射波の経路差に応じて反射波が入力されることになるが、直接波と反射波の経路差がちょうど波長の整数倍の時、両者の信号が重畳され、信号波形407に第2のピークを形成する場合である。従って、この場合には、反射波の影響で信号407が形成されたのか、駆動信号を401から406にしたために(SW信号の有無により、駆動信号が変化したのか)信号407が得られたのかを区別することができない。
【0081】
従って、本発明では、信号409の発生期間Ptを監視するとともに、各検出センサで検出される直接波と反射波の各々の経路差は、全て異なるため、全ての検出センサ3_Sa〜Sdの信号を比べて判定している。このような反射波の影響を考慮すると、信頼性を維持しながら構成を簡単に、かつコスト的に有利な方法として、駆動波形の401を406のように変調するよりも、駆動周期を変調する(信号422)方法が優れ、さらにはサンプリング周期を変更する方法は、反射波の影響を全く無視できる優れた方法であるといえる。
【0082】
尚、本発明では、筆記動作であるペンダウン時は、ペンアップ時よりもより詳細な座標データを送付することが好ましい(筆跡をより忠実に再現するため)と考え、ペンダウン時のサンプリングレートをペンアップ時のそれより大きい値に設定している。
【0083】
一方、図9に示すように、ペンサイドSW42_aと42_bの両者は、座標入力ペン4の断面方向において、約90度方向に配置され、操作者が握ったときに、右利き、左利き関係なく、その一方に親指が、その他方に人差し指が自然に触れるような位置に設定される。このようにペンサイドSW42_aと42_bを配置することと、どちらか一方のみのペンサイドSWがONすることによって設定される同一の動作モード(ペンアップ状態)と、両者がともにONされる状態のみで動作する動作モード(ペンダウン状態)を設定することで、利き腕に関係なく、使い勝手の良い座標入力ペン4を構成している。
【0084】
他の実施形態としては、1つのスイッチで2段階の切替を行うスイッチも有効である。つまり、軽押圧の場合に1段目のスイッチが動作し(ペンアップ状態)、さらに押圧することで2段目のスイッチが動作(ペンダウン状態)する構成である。この場合も同一の座標入力ペンで、利き腕に関係なく、使い勝手の良い座標入力ペン4を実現することが可能となる。
【0085】
さて、ペンサイドSW42_aと42_bを動作させることで、表示装置6の表面から離れていても、座標を入力して、カーソルを移動(ペンアップ状態)したり、あるいは筆記(ペンダウン状態)できる方法について説明したが、このような場合(直接、表示装置6の表面に接触はしていない、ペン先SW41が動作していない状態)において、比較的その表示装置6の近傍で、前述の座標入力動作をする場合(以後、近接入力と言う)と、表示装置6から離れたところで座標入力動作をする場合(以後、遠隔入力と言う)とでは操作上、要求される仕様が異なる。
【0086】
まず、近接入力の場合、表示面であるところの表示装置6と座標入力ペン4の空間距離は小さな値(=本座標入力装置で検出されるZ軸方向の値が小さい場合)であるので、操作者は、座標入力ペン4を移動することで、例えば、表示されているカーソルを直感的に、かつダイレクトに所望の位置に移動することが可能である。
【0087】
一方、遠隔入力によって表示されているカーソルを所望の位置に移動させようとする場合、まず操作者は直感的に所望の位置に座標入力ペンを位置させたと判断して座標を入力することになるが、表示されるカーソルの位置は所望の位置からのずれるのが一般的であり、そのずれ量は表示画面からより離れることでより大きくなる。従って、操作者は、その表示されているカーソルの位置と所望の位置とのずれ量を視認しながら、座標入力ペン4を徐々に移動して、カーソル位置を徐々に所望の位置に移動する動作を実行して目的を達成する。言い換えれば、直感によりまず所望位置に座標入力ペン4を位置せしめ、その応答(例えば、カーソルの表示位置)を視認することで、操作者が自身の手に位置修正動作を指示し、その動作に伴ってカーソルを徐々に移動させ所望位置にカーソルを移動させる。つまり、操作者による視覚情報に基づき操作者が補正動作を行うループを繰り返して、目的を達成することになる。
【0088】
このように、表示装置等に表示されている画像情報(XY平面上に座標系を有する画像情報)に対して、何らかの遠隔入力操作を行おうとする場合、操作者が一連の座標入力を行おうとする際の最初の1点目の座標値と前述の画像情報の座標値は、一致させることができない。このことは、例えば、OHP等により表示されている表示画像を指示する道具としてのレーザポインタを考えれば容易に理解される。操作者が所望の位置を指し示したと判断してレーザを照射することになるが、レーザ発光時の最初の1点目は所望の位置とは大きく異なり、レーザにより、指示されたポイント位置を見ながら、位置修正動作をして所望の位置にレーザを照射することができるようになるのである。
【0089】
さて、このレーザポインタを使った通常のプレゼンテーション、打ち合わせ等を想定すれば、操作者が直接所望の位置を指示することが困難であることに加え、聞き手からすれば、レーザポインタの指示位置が不連続に、かつ突然移動する。そのため、その指示位置を探す(ポインタが照射されていない場合でも探してしまう)ことに気をとられ、発表内容の理解を手助けする道具としては十分な仕様とはなっていない。
【0090】
一方、指示棒は所望の位置を指示する古典的な道具といえるが、聞き手からすれば、操作者による指示棒の動作が視覚的に予測でき、レーザポインタによる指示手段よりも、発表内容に集中できるという点では、良い道具といえる。但し、指示棒の長さには限度が有るので、操作範囲が限られる。
【0091】
本発明は、以上の点を鑑みなされたものであり、検出される座標値(X,Y,Z)の一軸(例えば、Z軸)情報を基に、他の2軸の座標値(例えば、X軸、Y軸)をどのようにして出力するかを判定する座標出力モード判定手段を有する。
【0092】
具体的に、図12を用いて説明する。
【0093】
図12は本発明の座標出力モード判定を説明するフローチャートである。
【0094】
まず、ステップS301で、処理を開始することになるが、この場合、連続して座標入力装置が座標値を出力しているかどうかを示すフラグが初期化される(Flag=0)。ステップS302で、座標演算に必要な信号が各検出センサ3_Sa〜Sd、もしくは、スタート信号を受信したか否かを判定する。有効と判定した場合(ステップS302でYES)、ステップS303に進む。一方、有効でないと判定した場合(ステップS302でNO)、ステップS312に進む。
【0095】
ステップS303で、ペンダウン状態かペンアップ状態かの判定(詳細は、図10Bのフローチャート参照)を行い、その判定結果に基づいて、ペンダウン信号を検出する。次に、ステップS304で、座標入力ペン4の位置座標(X,Y,Z)を導出する。次に、ステップS305で、Flag=1であるか否かを判定する。Flag=1でない場合(ステップS305でNO)、ステップS306に進む。一方、Flag=1である場合(ステップS305でYES)、ステップS311に進む。
【0096】
ステップS306で、演算されたZ値を基に、その値が所定値以下であるか否か判定する。所定値以下である場合(ステップS306でYES)、近接入力と判定して、ステップS307に進み、そのまま得られているXY平面の座標値(X,Y)を出力して、処理を終了する。尚、ペン先SW41がONの状態は、Z=0を検出することになり、この時もそのまま得られているXY平面の座標値(X,Y)をそのまま出力することになる。
【0097】
一方、ステップS306で、所定値より大きい場合(ステップS306でNO)、ステップS308に進み、Z値が所定値以上であるかを判定する。所定値以上である場合(ステップS308でYES)、遠隔入力と判定して、ステップS309に進み、得られたXY平面の座標値(X,Y)を座標値(X1st,Y1st)としてメモリに格納する。そして、ステップS310で、Flag=1として、ステップS302に戻る。そこで、再び、ステップS302で有効信号の検出を行うことになるが、前述した通り、本発明の座標入力装置は、所定のサンプリング周期(例えば、50点/秒)で座標算出を可能とする構成であるから、その周期を監視することで、連続して座標入力が行われている状態かを区別することが可能である。例えば、所定の周期でスタート信号が検出できない場合は、座標入力動作が中断したと判断し、ステップS312で、Flagをリセットして、処理を終了する。
【0098】
一方、ステップS302で、連続して座標入力動作が行われていると判定した場合(Flag=1)には、同様に、ステップS303、ステップS304の処理を実施した後、ステップS305からステップS311に進み、得られた座標値(X,Y)とステップS309でメモリに格納してあった座標値(X1st,Y1st)の差分、つまり、相対座標値(ΔX,ΔY)を出力して、ステップS302に戻る。この時、出力される座標値が絶対座標(X,Y)であるか、座標値(ΔX,ΔY)であるのかを区別するために、別途、例えば、Flagの値を同時に出力してもかまわない。
また、座標値(X1st,Y1st)は、連続して座標入力が行われている最初の一点目と説明したが、これに限定されるものでなく、連続入力期間中に、例えば、最初に有効となった座標値を記憶して、それ以降の座標値を制御すれば良い。つまり、座標入力装置の種類によっては最初に入力した座標値に信頼性が乏しい方式のものもあり(例えば、通例連続入力期間中の最初の3点目までを出力せず、安定した座標検出が可能となる4点目から有効な座標値として出力するような形態の座標検出方法を採用している場合)、その場合には連続入力期間中に例えば有効となった最初の座標値(先の例では4点目)を記憶すればよいことになる。
また、本願発明の構成では、ステップS306の所定値を300mm、ステップS308の所定値を1000mmと設定し(図10A参照)、その間のZ軸方向の値(300mm<Z値<1000mm)を検出すると、座標値を出力しないように構成しているが、両者の値は同一であってもよく、装置の使用目的に合わせて適宜設定すれば良いことは言うまでも無い。
【0099】
以上のように構成することで、操作者は遠隔入力の際、現状位置するカーソルの位置から、スムーズに所望の位置にカーソルを移動することが可能となる。また、その座標入力が連続して行われている一連の間は、座標入力ペン4のX方向の移動量及びY方向の移動量は、カーソルの移動量と1対1に、かつ絶対的に対応しているので、遠隔操作であっても、文字を入力したりすることも可能となる優れた効果が得られる。
【0100】
このように、本発明の3次元位置座標検出可能な座標入力装置は、検知される1軸の情報を用いて、残り2軸の座標値の出力形態を決定する動作方法と実用上の使い勝手を説明したが、その他の実施形態としては、1軸の情報を、例えば、スイッチ信号として動作させる方法も提案できる。先に説明したように、本発明の座標入力装置は、連続入力中かどうかをFlagによって判定できるので、例えば、マウスのクリック動作と同様の処理を、座標入力ペン4の移動動作によって検知することが可能となる。例えば、座標入力ペン4をZ軸方向のみ移動させる場合を考える。任意の所定位置から、座標入力ペン4をZ軸方向に移動させ、引き続き、元の位置に座標入力ペン4を戻す動作をした場合、マウスのクリックと同等の操作をしたと判定する。つまり、その動作を2回続けてすれば、ダブルクリックが入力されたと判定する方法である。
【0101】
このスイッチ情報の判定は、座標入力装置が検出するZ軸のみの値の急激な変化で行われ、座標入力ペン4の動作に伴って、表示画面を遠隔操作できる方法を示すものであり、Z軸のみの急激な値の変化を監視する等で、前述したZ軸の値による座標出力モードの設定方法との併用も可能である。
【0102】
また、本発明の実施形態は、空中を伝播する音波を基に、音波の発信源位置を3次元で検知する方法について開示するものであるが、得られた3次元位置座標を基に、どのようにして出力するか、その出力方法については、3次元座標入力装置の方式に限定されるもので無く、例えば、光を使った3次元座標入力装置(光学式)等であっても良いことはいうまでもない。
【0103】
以上、座標入力装置の、例えば、演算制御回路1内のマイクロコンピュータが全ての処理を実施し、得られた座標入力ペン4の空間座標(X,Y,Z)からZの値を参照して2次元の座標値の出力形態を決定して外部装置等にその情報を出力する座標入力装置を説明してきたが、他の実施形態として、次のような構成も考えられる。
【0104】
座標入力装置本体は、座標入力ペン4の空間座標(X,Y,Z)を検知し、その結果をそのまま外部機器に出力する。パーソナルコンピュータ等で構成される前述の外部機器は、座標入力装置が検出した空間座標を取り込むとともに、その取り込みのタイミングを監視することで、連続的な座標入力が行われているか否かも判定できる。そのため、同様な方法によりZ軸の値を参照して、X軸、Y軸の出力形態をパーソナルコンピュータ等で構成される前述の外部機器が決定し、例えば、パーソナルコンピュータに内蔵されている他のアプリケーションソフトにその情報を出力することで、同様な効果、操作性を得ることが可能となる。
【0105】
以上説明したように、上述の実施形態によれば、反射波の影響を受けること無く、かつ信号検出レベルの大小に依存することなく、安定して座標入力ペン4と各検出センサ3までを音波が伝播する時間のみを検出することができる。これにより、信頼性が高く、かつ高精度に3次元(空間)座標を導出することができる。また、信号検出レベルに依存しない検出方式であることから、部品間差等の歩留まりにも優れ、低コストで実現することができ、かつ空中を伝播する音波を信号として用いるので、本座標入力装置と重ねて用いられる表示装置の画質を全く低下させることなく構成することができる。
【0106】
加えて、座標入力ペン4の先端部にペン先SW41、及び座標入力ペン4の軸を含む断面に対称に少なくとも2個のペンサイドSW42_a、42_bを設け、両者ペンサイドスイッチのどちらか一方のみをオンした場合の動作モードを、どちらをオンさせても全く同一とすることで、右利き、左利きの区別なく、操作性の良い座標入力ペンを構成できるようにした。
【0107】
更に、検出された座標入力ペン4の3次元位置座標(X,Y,Z)データのうち、少なくとも1軸のデータを用いて座標入力装置のモードを設定し、そのモードに従って、残りの2軸の座標値の出力方法を決定するので、例えば、Z値が小さい場合には近接入力と判断して、座標(X,Y)をそのまま出力し、一方、Z値が比較的大きい場合には、遠隔入力と判断して、座標値を加工して(ΔX、ΔY)を出力するように構成したので、遠隔操作であっても、所定位置を指示するためのポインティング動作だけでなく、文字入力、図形入力ができる優れた利点が得られる。
【0108】
更に、検出された座標入力ペン4の3次元位置座標(X,Y,Z)データのうち、少なくとも1軸のデータを用いて、スイッチ情報を伝達することにより、遠隔操作によるコマンド入力ができる。
【0109】
尚、本発明の目的は、前述した実施形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、システムあるいは装置に供給し、そのシステムあるいは装置のコンピュータ(またはCPUやMPU)が記憶媒体に格納されたプログラムコードを読出し実行することによっても、達成されることは言うまでもない。
【0110】
この場合、記憶媒体から読出されたプログラムコード自体が前述した実施形態の機能を実現することになり、そのプログラムコードを記憶した記憶媒体は本発明を構成することになる。
【0111】
プログラムコードを供給するための記憶媒体としては、例えば、フロッピディスク、ハードディスク、光ディスク、光磁気ディスク、CD−ROM、CD−R/RW、DVD−ROM/RAM、磁気テープ、不揮発性のメモリカード、ROMなどを用いることができる。
【0112】
また、コンピュータが読出したプログラムコードを実行することにより、前述した実施形態の機能が実現されるだけでなく、そのプログラムコードの指示に基づき、コンピュータ上で稼働しているOS(オペレーティングシステム)などが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0113】
更に、記憶媒体から読出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書込まれた後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPUなどが実際の処理の一部または全部を行い、その処理によって前述した実施形態の機能が実現される場合も含まれることは言うまでもない。
【0114】
本発明を上記記憶媒体に適用する場合、その記憶媒体には、先に説明したフローチャートに対応するプログラムコードが格納されることになる。
【0115】
【発明の効果】
以上説明したように、本発明によれば、近接入力及び遠隔入力により座標を入力できる座標入力装置及びその制御方法、記録媒体を提供できる。
【図面の簡単な説明】
【図1】本発明の3次元(空間)座標計測可能な座標入力装置の概略構成を示す図である。
【図2】本発明の座標入力ペンの構成を示す図である。
【図3】本発明の音波の到達時間検出方法を説明するためのタイミングチャートである。
【図4】本発明の音波の到達時間検出を実現する回路のブロック図である。
【図5】本発明の演算制御回路の概略構成を示すブロック図である。
【図6】本発明の音波の到達時間検出方法を説明するためのタイミングチャートである。
【図7】本発明の音波の到達時間検出を実現する回路のブロック図である。
【図8】本発明の座標系を説明するための図である。
【図9】本発明の座標入力ペンの外観を示す図である。
【図10A】本発明の座標入力ペンの駆動モードを説明するための図である。
【図10B】本発明の座標入力ペンの動作を説明するフローチャートである。
【図11】本発明の座標入力ペンの駆動モードの判定を説明するための図である。
【図12】本発明の座標出力モード判定を説明するフローチャートである。
【図13】本発明の直接波及び反射波の経路差を説明するための図である。
【符号の説明】
1 演算制御回路
2 信号波形検出回路
3 検出センサ
4 座標入力ペン
6 表示装置
41 ペン先SW
42 ペンサイドSW
43 音波発生源
Claims (3)
- 座標入力面をX軸及びY軸で規定されるXY平面、前記座標入力面の法線方向をZ軸とする、XYZ空間における3次元位置座標を検出する座標入力装置であって、
指示具に対する前記X軸、前記Y軸、前記Z軸の座標値を検出する検出手段と、
前記Z軸の座標値を所定値と比較する比較手段と、
前記比較手段の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、第1の時点で検出された第1のX軸の座標値及び第1のY軸の座標値を記憶する記憶手段と、
前記比較手段の比較結果に基づいて、前記X軸及びY軸の座標値の出力を制御する制御手段とを備え、
前記制御手段は、
前記比較手段の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、前記第1の時点以降の第2の時点に検出される第2のX軸の座標値と前記記憶手段に記憶されている前記第1のX軸の座標値の差分、及び、前記第2の時点に検出される第2のY軸の座標値と前記記憶手段に記憶されている前記第1のY軸の座標値の差分を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力し、
前記比較手段の比較の結果、前記Z軸の座標値が前記所定値以下である場合、前記第1の時点で検出された第1のX軸の座標値、及び、前記第1の時点で検出された第1のY軸の座標値を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力する
ことを特徴とする座標入力装置。 - 座標入力面をX軸及びY軸で規定されるXY平面、前記座標入力面の法線方向をZ軸とする、XYZ空間における3次元位置座標を検出する座標入力装置の制御方法であって、
指示具に対する前記X軸、前記Y軸、前記Z軸の座標値を検出する検出工程と、
前記Z軸の座標値を所定値と比較する比較工程と、
前記比較工程の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、第1の時点で検出された第1のX軸の座標値及び第1のY軸の座標値を記憶媒体に記憶する記憶工程と、
前記比較工程の比較結果に基づいて、前記X軸及びY軸の座標値の出力を制御する制御工程とを備え、
前記制御工程は、
前記比較工程の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、前記第1の時点以降の第2の時点に検出される第2のX軸の座標値と前記記憶媒体に記憶されている前記第1のX軸の座標値の差分、及び、前記第2の時点に検出される第2のY軸の座標値と前記記憶媒体に記憶されている前記第1のY軸の座標値の差分を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力し、
前記比較工程の比較の結果、前記Z軸の座標値が前記所定値以下である場合、前記第1の時点で検出された第1のX軸の座標値、及び、前記第1の時点で検出された第1のY軸の座標値を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力する
ことを特徴とする座標入力装置の制御方法。 - 座標入力面をX軸及びY軸で規定されるXY平面、前記座標入力面の法線方向をZ軸とする、XYZ空間における3次元位置座標を検出する座標入力装置の制御として、コンピュータに、
指示具に対する前記X軸、前記Y軸、前記Z軸の座標値を検出する検出手順と、
前記Z軸の座標値を所定値と比較する比較手順と、
前記比較手順の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、第1の時点で検出された第1のX軸の座標値及び第1のY軸の座標値を記憶媒体に記憶する記憶手順と、
前記比較手順の比較結果に基づいて、前記X軸及びY軸の座標値の出力を制御する制御手順と
を実行させ、
前記制御手順は、
前記比較手順の比較の結果、前記Z軸の座標値が前記所定値より大きい場合、前記第1の時点以降の第2の時点に検出される第2のX軸の座標値と前記記憶媒体に記憶されている前記第1のX軸の座標値の差分、及び、前記第2の時点に検出される第2のY軸の座標値と前記記憶媒体に記憶されている前記第1のY軸の座標値の差分を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力し、
前記比較手順の比較の結果、前記Z軸の座標値が前記所定値以下である場合、前記第1の時点で検出された第1のX軸の座標値、及び、前記第1の時点で検出された第1のY軸の座標値を、前記X軸及び前記Y軸で規定されるXY平面における前記指示具に対する座標値として出力する
ためのプログラムを記録したコンピュータ読み取り可能な記録媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001032290A JP4590114B2 (ja) | 2001-02-08 | 2001-02-08 | 座標入力装置及びその制御方法、記録媒体 |
| US10/066,569 US6862019B2 (en) | 2001-02-08 | 2002-02-06 | Coordinate input apparatus, control method therefor, and computer-readable memory |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001032290A JP4590114B2 (ja) | 2001-02-08 | 2001-02-08 | 座標入力装置及びその制御方法、記録媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2002236544A JP2002236544A (ja) | 2002-08-23 |
| JP2002236544A5 JP2002236544A5 (ja) | 2008-03-13 |
| JP4590114B2 true JP4590114B2 (ja) | 2010-12-01 |
Family
ID=18896247
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2001032290A Expired - Fee Related JP4590114B2 (ja) | 2001-02-08 | 2001-02-08 | 座標入力装置及びその制御方法、記録媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US6862019B2 (ja) |
| JP (1) | JP4590114B2 (ja) |
Families Citing this family (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3963786B2 (ja) * | 2002-06-11 | 2007-08-22 | 富士通株式会社 | 情報処理装置 |
| JP3952896B2 (ja) * | 2002-07-30 | 2007-08-01 | キヤノン株式会社 | 座標入力装置及びその制御方法、プログラム |
| JP4006290B2 (ja) * | 2002-07-30 | 2007-11-14 | キヤノン株式会社 | 座標入力装置、座標入力装置の制御方法、プログラム |
| US7312788B2 (en) * | 2003-03-11 | 2007-12-25 | Fraunhofer-Gesellschaft Zur Foerderung Der Angewandten Forschung E.V. | Gesture-based input device for a user interface of a computer |
| JP3999689B2 (ja) * | 2003-03-17 | 2007-10-31 | インターナショナル・ビジネス・マシーンズ・コーポレーション | 音源位置取得システム、音源位置取得方法、該音源位置取得システムに使用するための音反射要素および該音反射要素の形成方法 |
| US20050104871A1 (en) * | 2003-11-15 | 2005-05-19 | Qing Liu | Computer input device |
| JP4789511B2 (ja) * | 2004-06-04 | 2011-10-12 | キヤノン株式会社 | 状況モニタリング装置及び状況モニタリングシステム |
| JP4583946B2 (ja) * | 2005-01-21 | 2010-11-17 | Necディスプレイソリューションズ株式会社 | 電子ペン |
| JP4199741B2 (ja) * | 2005-02-25 | 2008-12-17 | Necディスプレイソリューションズ株式会社 | 波動受信装置および波動受信判定方法 |
| JP4455392B2 (ja) * | 2005-04-15 | 2010-04-21 | キヤノン株式会社 | 座標入力装置及びその制御方法、プログラム |
| US7538894B2 (en) | 2005-04-15 | 2009-05-26 | Canon Kabushiki Kaisha | Coordinate input apparatus, control method thereof, and program |
| JP4622792B2 (ja) * | 2005-10-07 | 2011-02-02 | ソニー株式会社 | 遠隔操作システム,遠隔操作装置,情報処理装置,遠隔操作方法,情報処理方法,およびコンピュータプログラム |
| US7710504B2 (en) * | 2006-02-21 | 2010-05-04 | Mitsubishi Digital Electronics America, Inc. | Remote control system and method for controlling a television |
| JP4958497B2 (ja) * | 2006-08-07 | 2012-06-20 | キヤノン株式会社 | 位置姿勢測定装置及び位置姿勢測定方法、複合現実感提示システム、コンピュータプログラム及び記憶媒体 |
| GB0622451D0 (en) * | 2006-11-10 | 2006-12-20 | Intelligent Earth Ltd | Object position and orientation detection device |
| US8627211B2 (en) | 2007-03-30 | 2014-01-07 | Uranus International Limited | Method, apparatus, system, medium, and signals for supporting pointer display in a multiple-party communication |
| US7950046B2 (en) | 2007-03-30 | 2011-05-24 | Uranus International Limited | Method, apparatus, system, medium, and signals for intercepting a multiple-party communication |
| US8702505B2 (en) | 2007-03-30 | 2014-04-22 | Uranus International Limited | Method, apparatus, system, medium, and signals for supporting game piece movement in a multiple-party communication |
| US8060887B2 (en) | 2007-03-30 | 2011-11-15 | Uranus International Limited | Method, apparatus, system, and medium for supporting multiple-party communications |
| US7765261B2 (en) | 2007-03-30 | 2010-07-27 | Uranus International Limited | Method, apparatus, system, medium and signals for supporting a multiple-party communication on a plurality of computer servers |
| US7765266B2 (en) | 2007-03-30 | 2010-07-27 | Uranus International Limited | Method, apparatus, system, medium, and signals for publishing content created during a communication |
| TWI375169B (en) * | 2008-09-22 | 2012-10-21 | Htc Corp | Display device |
| US8810523B2 (en) * | 2009-04-20 | 2014-08-19 | Broadcom Corporation | Inductive touch screen and methods for use therewith |
| JP5460341B2 (ja) * | 2010-01-06 | 2014-04-02 | キヤノン株式会社 | 3次元計測装置及びその制御方法 |
| JP5489886B2 (ja) | 2010-06-30 | 2014-05-14 | キヤノン株式会社 | 座標入力装置、該装置における受光装置、及びその製造方法 |
| CN102375624A (zh) * | 2010-08-27 | 2012-03-14 | 刘中华 | 平板结构的超声波手写板 |
| JP5725774B2 (ja) | 2010-09-13 | 2015-05-27 | キヤノン株式会社 | 座標入力装置及び座標入力方法 |
| JP5973849B2 (ja) | 2012-03-08 | 2016-08-23 | キヤノン株式会社 | 座標入力装置および座標入力装置に用いられるセンサバー |
| JP5875445B2 (ja) | 2012-03-30 | 2016-03-02 | キヤノン株式会社 | 座標入力装置 |
| JP6049334B2 (ja) | 2012-07-12 | 2016-12-21 | キヤノン株式会社 | 検出装置、検出方法及びプログラム |
| JP6031293B2 (ja) | 2012-08-03 | 2016-11-24 | キヤノン株式会社 | 座標入力装置及びその制御方法、プログラム |
| JP6021531B2 (ja) | 2012-08-31 | 2016-11-09 | キヤノン株式会社 | 座標入力装置及びその制御方法、プログラム |
| EP2749996B1 (en) * | 2012-12-28 | 2018-05-30 | Sony Mobile Communications Inc. | Electronic device and method for improving accuracy of location determination of a user input on a touch panel |
| US9430061B2 (en) * | 2013-03-07 | 2016-08-30 | Qualcomm Incorporated | Ultrasonic hybrid input device and corresponding tuning method |
| JP6096293B2 (ja) * | 2013-05-31 | 2017-03-15 | シャープ株式会社 | タッチパネルシステム、電子機器 |
| KR20150058774A (ko) * | 2013-11-21 | 2015-05-29 | 삼성전자주식회사 | 터치 펜 및 터치 기능 지원 방법과 장치 |
| KR101457336B1 (ko) * | 2014-02-21 | 2014-11-13 | 주식회사 트레이스 | 3축 자기력 센서와 자기력 펜을 이용한 터치스크린 융합 디지타이저 |
| US9720521B2 (en) * | 2014-02-21 | 2017-08-01 | Qualcomm Incorporated | In-air ultrasound pen gestures |
| US11358290B2 (en) | 2017-10-19 | 2022-06-14 | Canon Kabushiki Kaisha | Control apparatus, robot system, method for operating control apparatus, and storage medium |
| JP2019084601A (ja) | 2017-11-02 | 2019-06-06 | キヤノン株式会社 | 情報処理装置、把持システムおよび情報処理方法 |
| US11157099B2 (en) * | 2019-08-05 | 2021-10-26 | Adx Research, Inc. | Electronic writing device and a method for operating the same |
| JP2021197018A (ja) * | 2020-06-17 | 2021-12-27 | ソニーグループ株式会社 | 情報処理装置、情報処理方法、およびプログラム |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5930249A (ja) | 1982-08-12 | 1984-02-17 | Canon Inc | 光学的情報再生装置 |
| DE3751763T2 (de) | 1986-06-27 | 1996-11-14 | Canon Kk | Koordinateneingabegerät |
| US4887245A (en) | 1987-04-06 | 1989-12-12 | Canon Kabushiki Kaisha | Coordinates input apparatus |
| JPH0614310B2 (ja) | 1987-06-25 | 1994-02-23 | キヤノン株式会社 | 座標入力装置 |
| DE3885521T2 (de) | 1987-07-01 | 1994-03-17 | Canon Kk | Koordinateneingabevorrichtung. |
| JPH0758454B2 (ja) | 1987-07-14 | 1995-06-21 | キヤノン株式会社 | 座標入力装置 |
| EP0320687A1 (de) * | 1987-12-11 | 1989-06-21 | Siemens Aktiengesellschaft | Dünnfilm-Magnetkopf zur vertikalen Magnetisierung |
| JP2502649B2 (ja) | 1988-01-28 | 1996-05-29 | キヤノン株式会社 | 座標入力装置 |
| US5210785A (en) | 1988-02-29 | 1993-05-11 | Canon Kabushiki Kaisha | Wireless communication system |
| US5070325A (en) | 1988-03-18 | 1991-12-03 | Canon Kabushiki Kaisha | Coordinate input apparatus |
| JP2618005B2 (ja) | 1988-07-25 | 1997-06-11 | キヤノン株式会社 | 復号方法 |
| ES2081824T3 (es) | 1988-10-20 | 1996-03-16 | Canon Kk | Aparato para la introduccion de coordenadas. |
| JP2592972B2 (ja) | 1989-12-25 | 1997-03-19 | キヤノン株式会社 | 座標入力装置 |
| JPH0475045A (ja) | 1990-07-17 | 1992-03-10 | Canon Inc | 座標入力装置 |
| JP3109826B2 (ja) | 1990-10-19 | 2000-11-20 | キヤノン株式会社 | 座標入力装置および座標入力方法 |
| JP3053262B2 (ja) | 1991-08-05 | 2000-06-19 | キヤノン株式会社 | 座標入力装置及び方法 |
| EP0544278B1 (en) | 1991-11-27 | 1998-07-15 | Canon Kabushiki Kaisha | Coordinate input apparatus |
| JP2614691B2 (ja) * | 1992-01-23 | 1997-05-28 | 旭化成工業株式会社 | 型紙の組立形状視覚化方法および装置 |
| JPH0644005A (ja) * | 1992-01-24 | 1994-02-18 | Seiko Instr Inc | 座標入力装置 |
| JP3320138B2 (ja) | 1993-05-07 | 2002-09-03 | キヤノン株式会社 | 座標入力装置及び方法 |
| US5565893A (en) | 1993-05-07 | 1996-10-15 | Canon Kabushiki Kaisha | Coordinate input apparatus and method using voltage measuring device |
| JPH07141089A (ja) | 1993-11-12 | 1995-06-02 | Canon Inc | 座標入力装置 |
| JP3630712B2 (ja) | 1994-02-03 | 2005-03-23 | キヤノン株式会社 | ジェスチャー入力方法及びその装置 |
| JP3271730B2 (ja) | 1994-04-28 | 2002-04-08 | キヤノン株式会社 | 発電システムの充電制御装置 |
| JPH08275390A (ja) | 1995-03-29 | 1996-10-18 | Canon Inc | 充放電制御方法、充放電制御装置及び該充放電制御装置を有する発電システム |
| JPH08286817A (ja) | 1995-04-17 | 1996-11-01 | Canon Inc | 座標入力装置 |
| JPH0929169A (ja) | 1995-07-19 | 1997-02-04 | Canon Inc | 振動伝達板及びその製造方法及び座標入力装置 |
| EP0762315A3 (en) | 1995-09-06 | 2000-03-29 | Canon Kabushiki Kaisha | Coordinates input apparatus and its method |
| JPH09282080A (ja) | 1996-04-16 | 1997-10-31 | Canon Inc | 情報入力方法とその装置 |
| JP4294122B2 (ja) | 1998-06-23 | 2009-07-08 | アルプス電気株式会社 | 座標入力装置 |
-
2001
- 2001-02-08 JP JP2001032290A patent/JP4590114B2/ja not_active Expired - Fee Related
-
2002
- 2002-02-06 US US10/066,569 patent/US6862019B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| JP2002236544A (ja) | 2002-08-23 |
| US6862019B2 (en) | 2005-03-01 |
| US20020130850A1 (en) | 2002-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4590114B2 (ja) | 座標入力装置及びその制御方法、記録媒体 | |
| JP4006290B2 (ja) | 座標入力装置、座標入力装置の制御方法、プログラム | |
| JP3952896B2 (ja) | 座標入力装置及びその制御方法、プログラム | |
| US10241622B1 (en) | Method and apparatus of position tracking and detection of user input information | |
| US8169404B1 (en) | Method and device for planary sensory detection | |
| JP4899108B2 (ja) | 腕時計型電子メモ装置 | |
| KR100893114B1 (ko) | 좌표 입력을 위한 초음파 거리 측정 장치 및 방법 | |
| US7075514B2 (en) | Coordinate input apparatus, control method therefor, and computer-readable memory | |
| JP2004078323A (ja) | 座標入力装置及び座標演算方法 | |
| JP2002351605A (ja) | 座標入力装置 | |
| KR101153977B1 (ko) | 휴대 단말기용 입력 시스템 | |
| JP4615178B2 (ja) | 情報入出力システム、プログラムおよび記憶媒体 | |
| JP2002236545A (ja) | 座標入力装置及びその制御方法、コンピュータ可読メモリ | |
| JP2004070496A (ja) | 座標入力装置、座標値処理方法 | |
| JP4136584B2 (ja) | 座標入力装置及び座標値出力方法とプログラム | |
| JP2004185488A (ja) | 座標入力装置 | |
| JP2021197024A (ja) | 表示装置、表示方法及びプログラム | |
| JP2004272636A (ja) | 検出座標値の処理方法、及び座標入力装置 | |
| JP2004062656A (ja) | 座標入力装置及びその制御方法、プログラム | |
| JP2004310351A (ja) | 座標入力装置 | |
| JP2004192033A (ja) | 座標入力装置 | |
| JP2004240634A (ja) | 座標入力装置 | |
| JP2004070575A (ja) | 座標入力装置、及び検出座標値の処理方法 | |
| JP2003029917A (ja) | 座標入力装置 | |
| KR200354497Y1 (ko) | 다기능 전자칠판 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080129 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080129 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091030 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091228 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100906 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100913 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4590114 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130917 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |