JP4533239B2 - 画像読取装置および画像形成装置 - Google Patents
画像読取装置および画像形成装置 Download PDFInfo
- Publication number
- JP4533239B2 JP4533239B2 JP2005150921A JP2005150921A JP4533239B2 JP 4533239 B2 JP4533239 B2 JP 4533239B2 JP 2005150921 A JP2005150921 A JP 2005150921A JP 2005150921 A JP2005150921 A JP 2005150921A JP 4533239 B2 JP4533239 B2 JP 4533239B2
- Authority
- JP
- Japan
- Prior art keywords
- reading
- unit
- control unit
- image
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 230000001133 acceleration Effects 0.000 claims description 38
- 230000004044 response Effects 0.000 claims description 2
- 230000003287 optical effect Effects 0.000 description 58
- 238000012546 transfer Methods 0.000 description 40
- 238000010586 diagram Methods 0.000 description 36
- 238000000034 method Methods 0.000 description 24
- 238000012545 processing Methods 0.000 description 15
- 239000000463 material Substances 0.000 description 13
- 238000000926 separation method Methods 0.000 description 13
- 238000003705 background correction Methods 0.000 description 11
- 239000011521 glass Substances 0.000 description 11
- 238000011161 development Methods 0.000 description 10
- 238000001514 detection method Methods 0.000 description 9
- 238000004891 communication Methods 0.000 description 8
- 238000012544 monitoring process Methods 0.000 description 8
- 238000005286 illumination Methods 0.000 description 7
- 238000006243 chemical reaction Methods 0.000 description 6
- 230000010355 oscillation Effects 0.000 description 6
- 238000013461 design Methods 0.000 description 5
- 101710092886 Integrator complex subunit 3 Proteins 0.000 description 4
- 102100025254 Neurogenic locus notch homolog protein 4 Human genes 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 238000004140 cleaning Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 239000000758 substrate Substances 0.000 description 4
- 230000006399 behavior Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000006641 stabilisation Effects 0.000 description 3
- 238000011105 stabilization Methods 0.000 description 3
- 230000004913 activation Effects 0.000 description 2
- 238000009499 grossing Methods 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 238000012356 Product development Methods 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 230000035945 sensitivity Effects 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 230000000153 supplemental effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images





















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/32—Circuits or arrangements for control or supervision between transmitter and receiver or between image input and image output device, e.g. between a still-image camera and its memory or between a still-image camera and a printer device
- H04N1/32561—Circuits or arrangements for control or supervision between transmitter and receiver or between image input and image output device, e.g. between a still-image camera and its memory or between a still-image camera and a printer device using a programmed control device, e.g. a microprocessor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/32—Circuits or arrangements for control or supervision between transmitter and receiver or between image input and image output device, e.g. between a still-image camera and its memory or between a still-image camera and a printer device
- H04N1/32561—Circuits or arrangements for control or supervision between transmitter and receiver or between image input and image output device, e.g. between a still-image camera and its memory or between a still-image camera and a printer device using a programmed control device, e.g. a microprocessor
- H04N1/32571—Details of system components
- H04N1/32587—Controller
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/32—Circuits or arrangements for control or supervision between transmitter and receiver or between image input and image output device, e.g. between a still-image camera and its memory or between a still-image camera and a printer device
- H04N1/32561—Circuits or arrangements for control or supervision between transmitter and receiver or between image input and image output device, e.g. between a still-image camera and its memory or between a still-image camera and a printer device using a programmed control device, e.g. a microprocessor
- H04N1/32593—Using a plurality of controllers, e.g. for controlling different interfaces
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2201/00—Indexing scheme relating to scanning, transmission or reproduction of documents or the like, and to details thereof
- H04N2201/0077—Types of the still picture apparatus
- H04N2201/0094—Multifunctional device, i.e. a device capable of all of reading, reproducing, copying, facsimile transception, file transception
Landscapes
- Engineering & Computer Science (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Facsimile Scanning Arrangements (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
- Facsimiles In General (AREA)
Description
1001 特定ユニット
1002 整合ユニット
1003 ASIC
1004 EEPROM
1005 発振回路
1005a,1005b I/F回路
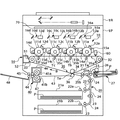
1006 ADF(自動原稿給送装置)
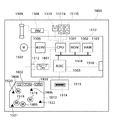
1501 CPU
1502 ROM
1503 RAM
1506 モータドライバ
1507 光学モータ
Claims (7)
- 原稿上の画像を読み取るための読取手段と、前記読取手段を所定方向へ駆動するための駆動手段とを有するとともに、原稿が流し読み位置を通過するように該原稿を自動的に給送する自動原稿給送装置が装着される画像読取装置であって、
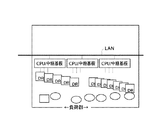
前記自動原稿給送装置が装着された際に該自動原稿給送装置を制御するための機能が少なくとも設けられている第1の制御ユニットと、
前記第1の制御ユニットとは別体に構成され、前記駆動手段を制御するための第2の制御ユニットと、
前記第1の制御ユニットと前記第2の制御ユニットとを接続するインタフェース手段とを備え、
前記第1の制御ユニットは、装置仕様を識別するための識別情報を保持する識別情報保持手段と、前記インタフェース手段を介して前記識別情報を前記第2の制御ユニットに対して通知する通知手段とを有し、
前記第2の制御ユニットは、前記識別情報と対応付けて前記駆動手段の駆動プロファイル作成に用いられるデータを記憶する記憶手段と、前記第1の制御ユニットから通知された識別情報に対応するデータを前記記憶手段から読み出し、該読み出されたデータに基づいて前記駆動手段に対する駆動プロファイルを作成する駆動プロファイル作成手段とを有し、前記作成された駆動プロファイルに従って前記駆動手段を制御することを特徴とする画像読取装置。 - 前記駆動手段は、前記読取手段を所定方向へ駆動するための駆動モータと、前記第2の制御ユニットによる制御に従って前記駆動モータを駆動する駆動回路とを有し、前記駆動回路は、前記第1の制御ユニット内に含まれ、
前記第2の制御ユニットは、前記インタフェース手段を介して、前記作成された駆動プロファイルに従って前記駆動手段の前記駆動回路に対して制御信号を出力することを特徴とする請求項1記載の画像読取装置。 - 前記第2の制御ユニットは、前記第1の制御ユニットから通知された識別情報を認識することができない場合に、前記第1の制御ユニットに対して識別情報の再通知要求を行う再通知要求手段を有し、
前記第1の制御ユニットは、前記再通知要求を受け取ると、該再通知要求に応じて前記第2の制御ユニットが認識できる識別情報を再通知することを特徴とする請求項1記載の画像読取装置。 - 前記第1の制御ユニットは、前記インタフェース手段を介して、前記第2の制御ユニットの前記記憶手段に記憶されているデータを書き換えるデータ書き換え手段を有することを特徴とする請求項1記載の画像読取装置。
- 前記記憶手段は、交換自在に設けられていることを特徴とする請求項1記載の画像読取装置。
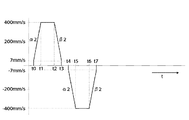
- 所定位置に置かれた原稿に対して前記読取手段を所定方向へ移動させることによって、前記原稿上の画像を読み取る原稿固定読みモードと、前記自動原稿給送装置を用いた原稿流し読みモードとを有し、
前記記憶手段に保持されているデータは、前記識別情報に応じて、少なくとも、前記原稿固定読みモードにおける前記読取手段の加速区間および減速区間と、等速区間の速度とをそれぞれ規定するためのデータであることを特徴とする請求項2記載の画像読取装置。 - 請求項1記載の画像読取装置を備えることを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005150921A JP4533239B2 (ja) | 2005-05-24 | 2005-05-24 | 画像読取装置および画像形成装置 |
| US11/438,485 US8305656B2 (en) | 2005-05-24 | 2006-05-22 | Image reading apparatus, image forming apparatus incorporating the same, image reading control method therefor, and program implementing the method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005150921A JP4533239B2 (ja) | 2005-05-24 | 2005-05-24 | 画像読取装置および画像形成装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006332860A JP2006332860A (ja) | 2006-12-07 |
| JP2006332860A5 JP2006332860A5 (ja) | 2010-01-28 |
| JP4533239B2 true JP4533239B2 (ja) | 2010-09-01 |
Family
ID=37493838
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005150921A Expired - Fee Related JP4533239B2 (ja) | 2005-05-24 | 2005-05-24 | 画像読取装置および画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8305656B2 (ja) |
| JP (1) | JP4533239B2 (ja) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4649271B2 (ja) * | 2005-06-08 | 2011-03-09 | キヤノン株式会社 | 制御装置 |
| JP4776644B2 (ja) | 2008-03-05 | 2011-09-21 | シャープ株式会社 | 画像形成装置 |
| JP4924687B2 (ja) * | 2009-09-30 | 2012-04-25 | ブラザー工業株式会社 | 画像読取装置 |
| JP5352434B2 (ja) * | 2009-11-24 | 2013-11-27 | 京セラドキュメントソリューションズ株式会社 | 原稿搬送装置及びこれを搭載した画像形成装置 |
| JP5220089B2 (ja) * | 2010-12-17 | 2013-06-26 | キヤノン株式会社 | 原稿読取装置 |
| JP2013236152A (ja) * | 2012-05-07 | 2013-11-21 | Ricoh Co Ltd | 撮像装置、画像読取装置および画像形成装置 |
| JP5842881B2 (ja) * | 2013-08-20 | 2016-01-13 | コニカミノルタ株式会社 | 画像形成装置 |
| JP6413698B2 (ja) * | 2014-11-26 | 2018-10-31 | 富士ゼロックス株式会社 | 画像形成装置及び通信監視システム |
| JP2021141483A (ja) * | 2020-03-06 | 2021-09-16 | キヤノン株式会社 | 画像形成装置のための制御装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000307812A (ja) * | 1999-04-16 | 2000-11-02 | Ricoh Co Ltd | 画像形成装置 |
| JP2001156951A (ja) * | 1999-11-25 | 2001-06-08 | Ricoh Co Ltd | 画像形成装置 |
| JP2001228560A (ja) * | 2000-02-16 | 2001-08-24 | Fuji Xerox Co Ltd | 画像読取装置 |
| JP2002232651A (ja) * | 2001-02-06 | 2002-08-16 | Ricoh Co Ltd | モータ駆動装置 |
| JP2003307786A (ja) * | 2002-04-16 | 2003-10-31 | Canon Inc | 画像形成装置 |
Family Cites Families (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0197199A (ja) * | 1987-10-08 | 1989-04-14 | Oki Electric Ind Co Ltd | パルスモータ制御装置 |
| JPH02298934A (ja) * | 1989-05-12 | 1990-12-11 | Fuji Xerox Co Ltd | 画像記録装置における振動防止方式 |
| JPH05104808A (ja) | 1991-10-17 | 1993-04-27 | Sharp Corp | 複数のステツピングモータを備えるプリンタ装置 |
| US5502576A (en) * | 1992-08-24 | 1996-03-26 | Ramsay International Corporation | Method and apparatus for the transmission, storage, and retrieval of documents in an electronic domain |
| JP3221085B2 (ja) * | 1992-09-14 | 2001-10-22 | 富士ゼロックス株式会社 | 並列処理装置 |
| US5499341A (en) * | 1994-07-25 | 1996-03-12 | Loral Aerospace Corp. | High performance image storage and distribution apparatus having computer bus, high speed bus, ethernet interface, FDDI interface, I/O card, distribution card, and storage units |
| JPH08251320A (ja) * | 1995-03-11 | 1996-09-27 | Ricoh Co Ltd | 原稿読み取り制御装置 |
| US5606395A (en) * | 1996-01-11 | 1997-02-25 | Xerox Corporation | Method and apparatus for adjusting machine parameters in a printing machine to provide real-time print appearance control |
| JP3426079B2 (ja) * | 1996-03-18 | 2003-07-14 | シャープ株式会社 | 画像形成システム |
| JPH1049000A (ja) * | 1996-07-31 | 1998-02-20 | Canon Inc | 画像形成装置、リーダコントローラおよびその制御方法 |
| EP0938718A4 (en) * | 1996-11-08 | 2006-03-29 | Ncs Pearson Inc | OPTICAL SCANNING WITH PIXEL OUTPUT CALIBRATED |
| EP0863662B1 (en) * | 1997-03-05 | 2004-09-29 | Matsushita Electric Industrial Co., Ltd. | Image processing apparatus |
| JPH1198330A (ja) * | 1997-09-22 | 1999-04-09 | Toshiba Corp | 画像読取装置と画像読取方法および画像形成装置と画像形成方法 |
| US6247078B1 (en) * | 1997-10-14 | 2001-06-12 | International Business Machines Corporation | Computer interface for integrating a first computer into a second computer |
| US6038563A (en) * | 1997-10-31 | 2000-03-14 | Sun Microsystems, Inc. | System and method for restricting database access to managed object information using a permissions table that specifies access rights corresponding to user access rights to the managed objects |
| JP3937548B2 (ja) * | 1997-12-29 | 2007-06-27 | カシオ計算機株式会社 | データアクセス制御装置およびそのプログラム記録媒体 |
| AT408038B (de) * | 1998-03-17 | 2001-08-27 | Keba Rondo Gesmbh | Leseeinheit für ein dokument |
| US6570671B1 (en) * | 1998-09-28 | 2003-05-27 | Canon Kabushiki Kaisha | Image forming apparatus and recording control device |
| JP4248633B2 (ja) * | 1998-10-16 | 2009-04-02 | パナソニック株式会社 | 画像読み取り装置およびディジタル複写機 |
| CA2343830C (en) * | 2000-05-12 | 2005-02-08 | Seiko Epson Corporation | Drive mechanism control device and method |
| JP4124990B2 (ja) * | 2000-11-07 | 2008-07-23 | キヤノン株式会社 | 撮像装置及び撮像装置の制御方法 |
| JP2002236577A (ja) * | 2000-11-17 | 2002-08-23 | Canon Inc | 印刷処理における自動認証方法及びそのシステム |
| JP2002248831A (ja) * | 2000-12-22 | 2002-09-03 | Ricoh Co Ltd | 画像形成装置、画像形成方法及びコンピュータプログラム |
| JP2002259100A (ja) * | 2000-12-28 | 2002-09-13 | Ricoh Co Ltd | 印刷システム |
| US6771397B2 (en) * | 2001-03-12 | 2004-08-03 | Kabushiki Kaisha Toshiba | Image reader for use in image forming apparatus |
| US6831761B2 (en) * | 2001-03-30 | 2004-12-14 | Eastman Kodak Company | Document scanner having a selectable range of resolutions with reduced processing |
| JP4895148B2 (ja) * | 2001-09-28 | 2012-03-14 | キヤノン株式会社 | 画像形成装置及びその制御方法 |
| JP3798349B2 (ja) * | 2002-08-20 | 2006-07-19 | 株式会社リコー | 画像形成装置 |
| US20040125402A1 (en) * | 2002-09-13 | 2004-07-01 | Yoichi Kanai | Document printing program, document protecting program, document protecting system, document printing apparatus for printing out a document based on security policy |
| JP4979943B2 (ja) * | 2003-03-04 | 2012-07-18 | 株式会社東芝 | 画像形成装置 |
| US20040196514A1 (en) * | 2003-03-05 | 2004-10-07 | Koji Tanimoto | Image sensor unit |
| JP4310129B2 (ja) * | 2003-04-24 | 2009-08-05 | キヤノン株式会社 | 原稿給送装置、画像形成装置、原稿給送装置の制御方法及び画像形成装置の制御方法 |
| US20050021980A1 (en) * | 2003-06-23 | 2005-01-27 | Yoichi Kanai | Access control decision system, access control enforcing system, and security policy |
| JP2005017541A (ja) * | 2003-06-24 | 2005-01-20 | Canon Inc | 画像形成方法及び画像形成装置 |
| JP4432504B2 (ja) * | 2004-01-21 | 2010-03-17 | 富士ゼロックス株式会社 | 画像読み取り装置 |
| JP4530793B2 (ja) * | 2004-02-18 | 2010-08-25 | 株式会社リコー | 画像形成装置、情報処理装置、情報処理システム、認証方法、認証プログラム及び記録媒体 |
| JP4064375B2 (ja) * | 2004-06-10 | 2008-03-19 | シャープ株式会社 | 印刷装置、印刷制限管理システム、印刷制御プログラム、印刷制御プログラムを記録した記録媒体 |
| JP2006048643A (ja) * | 2004-07-08 | 2006-02-16 | Namco Ltd | 端末装置、プログラム、情報記憶媒体およびデータ処理方法 |
| JP4239950B2 (ja) * | 2004-10-29 | 2009-03-18 | コニカミノルタビジネステクノロジーズ株式会社 | デバイスとその管理方法及び管理プログラム |
| US7668830B2 (en) * | 2004-11-29 | 2010-02-23 | Nokia Corporation | Access rights |
| JP4075906B2 (ja) * | 2005-05-10 | 2008-04-16 | コニカミノルタビジネステクノロジーズ株式会社 | 画像読取装置および画像形成装置 |
| JP2007199909A (ja) * | 2006-01-25 | 2007-08-09 | Fuji Xerox Co Ltd | セキュリティポリシ付与装置、プログラム及び方法 |
-
2005
- 2005-05-24 JP JP2005150921A patent/JP4533239B2/ja not_active Expired - Fee Related
-
2006
- 2006-05-22 US US11/438,485 patent/US8305656B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000307812A (ja) * | 1999-04-16 | 2000-11-02 | Ricoh Co Ltd | 画像形成装置 |
| JP2001156951A (ja) * | 1999-11-25 | 2001-06-08 | Ricoh Co Ltd | 画像形成装置 |
| JP2001228560A (ja) * | 2000-02-16 | 2001-08-24 | Fuji Xerox Co Ltd | 画像読取装置 |
| JP2002232651A (ja) * | 2001-02-06 | 2002-08-16 | Ricoh Co Ltd | モータ駆動装置 |
| JP2003307786A (ja) * | 2002-04-16 | 2003-10-31 | Canon Inc | 画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2006332860A (ja) | 2006-12-07 |
| US20060274384A1 (en) | 2006-12-07 |
| US8305656B2 (en) | 2012-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4533239B2 (ja) | 画像読取装置および画像形成装置 | |
| JP7006163B2 (ja) | 画像処理装置およびプログラム | |
| US7593128B2 (en) | Printer control apparatus and method of controlling the same, printer and method of controlling the same, reader and method of controlling the same, and image forming system | |
| US10379455B2 (en) | Image forming apparatus | |
| US20070268357A1 (en) | Image forming apparatus | |
| JP4641479B2 (ja) | 画像形成装置 | |
| KR101736723B1 (ko) | 인쇄 제어 장치, 그 제어 방법 및 컴퓨터 판독 가능한 기억매체 | |
| JP4649271B2 (ja) | 制御装置 | |
| JP4318199B2 (ja) | 画像形成装置および複写装置 | |
| JP2018098606A (ja) | 画像形成装置、情報処理装置およびプログラム | |
| JP5361344B2 (ja) | 画像形成装置 | |
| JP5854683B2 (ja) | 画像形成装置及びその制御方法、並びにプログラム | |
| JP2007074643A (ja) | 画像読取装置 | |
| US20120229856A1 (en) | Image forming apparatus, method of controlling start, and start control program | |
| JP2019025750A (ja) | 画像形成装置およびプログラム | |
| US9316980B2 (en) | Image forming apparatus and image formation method that paper does not stop in registration roller position | |
| JP2010286641A (ja) | 画像形成装置 | |
| JP6761451B2 (ja) | 印刷装置とその制御方法 | |
| JP6395691B2 (ja) | 印刷制御装置とその制御方法 | |
| JP2024069073A (ja) | 画像形成装置 | |
| JP5663903B2 (ja) | 画像形成装置及び画像形成方法 | |
| JP2011130124A (ja) | 画像形成装置 | |
| JP2007072309A (ja) | 制御装置、その制御方法、プログラム、及び記憶媒体 | |
| JP2006313203A (ja) | マスク信号制御装置、画像形成装置及びマスク信号制御方法 | |
| JP2005305769A (ja) | 画像形成エンジンおよび画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20070626 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080522 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080522 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091208 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100308 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100316 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100513 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20100601 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20100611 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130618 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |