JP3801068B2 - Fmcwレーダ装置,プログラム - Google Patents
Fmcwレーダ装置,プログラム Download PDFInfo
- Publication number
- JP3801068B2 JP3801068B2 JP2002041633A JP2002041633A JP3801068B2 JP 3801068 B2 JP3801068 B2 JP 3801068B2 JP 2002041633 A JP2002041633 A JP 2002041633A JP 2002041633 A JP2002041633 A JP 2002041633A JP 3801068 B2 JP3801068 B2 JP 3801068B2
- Authority
- JP
- Japan
- Prior art keywords
- temporary
- peak
- new
- continuation
- continuity
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Signal Processing (AREA)
- Radar Systems Or Details Thereof (AREA)
- Traffic Control Systems (AREA)
- Emergency Alarm Devices (AREA)
Description
【発明の属する技術分野】
本発明は、移動体の衝突防止や一定距離追従走行等に使用され、レーダ波の送受信により移動体の外部に存在する対象物との相対速度や距離を検出するFMCWレーダ装置、及びプログラムに関する。
【0002】
【従来の技術】
一般的にFMCWレーダ装置では、次のようにして対象物との距離Dや相対速度V(以下「対象物情報」ともいう)を求めている。即ち、まず、三角波状の変調信号により周波数変調され、周波数が漸次増減する送信信号をレーダ波として送信し、対象物により反射されたレーダ波を受信する。そして、受信信号に送信信号をミキシングすることによりビート信号を発生させ、このビート信号の周波数(ピーク周波数)を、信号処理器等を用いて送信信号の周波数が増加する上り変調部及び周波数が減少する下り変調部の各区間毎に特定する。この特定された上り変調部のピーク周波数fb1及び下り変調部のピーク周波数fb2に基づいて、対象物との距離Dや相対速度Vを次式(1)(2)を用いて算出する。
【0003】
D={C/(8ΔF・fm)}・(fb1+fb2) (1)
V={C/(4f0)}・(fb1−fb2) (2)
なお、△Fは送信信号の周波数変位幅、f0は送信信号の中心周波数、1/fmは1周期の変調に要する時間、Cは光速を表す。
【0004】
ところで、実際の使用環境においては複数の対象物が同時に存在するため、上り変調部及び下り変調部のそれぞれにて、対象物の数に応じた複数のピーク周波数が検知される。
また、FMCWレーダ装置を搭載した移動体と検知される対象物との移動速度が異なる(相対速度V≠0)場合には、ドップラー効果によってピーク周波数がシフトする。つまり、複数の対象物が同時に存在する場合、ピーク周波数は、必ずしも対象物までの距離順に並ぶわけではなく、上り変調部側と下り変調部側とのピーク周波数を組み合わせる際に、単純に周波数順に組み合わせてしまうと、対象物情報を正しく得ることができない。
【0005】
そこで、従来では、上り変調部と下り変調部とでピーク周波数が正しく組み合わされているか否かを、次のようにして判断していた。即ち、両変調部のピーク周波数を適当に組み合わせたものを仮ピークペアとし、その仮ピークペアにより特定される仮対象物の挙動から、一定時間経過後に検出されるべきピーク周波数の組み合わせ(予測ピークペアという)を予測する。そして、一定時間経過後に、実際に検出されるピーク周波数の中に、予測ピークペアとほぼ一致するものが存在する時には、そのピーク周波数の組み合わせは真のピークペアであると判断するのである。
【0006】
例えば、仮ピークペアにより特定される仮対象物が、100m先を時速50km/hで走行しているものとして求められた場合、一定時間後、例えば1秒後に仮対象物は、113.9m付近を時速50km/h程度で走行しているものと予測されるため、このような値を持つピーク周波数の組み合わせが存在するか否かを判断すればよい。
【0007】
【発明が解決しようとする課題】
しかし、上述のように仮ピークペアから特定される仮対象物の挙動を予測することにより、仮ピークペアの真偽を判断する方法では、対象物情報を出力するまでに時間を要してしまい、急速に接近する対象物の認識等、速やかな認識が必要となる場合には適さないという問題があった。
【0008】
即ち、FMCWレーダ装置では、周知の通り、使用するレーダ波の変調幅によって距離分解能が決まる。そして、仮対象物の挙動の予測を正しく行うには、少なくとも、仮対象物が距離分解能幅以上の移動をする必要がある。その移動に必要な時間が、FMCWレーダ装置では、通常、初期検出時間として設定されており、これが短いほど速やかな認識が可能となる。しかし、この初期検出時間は、距離分解能幅をΔD、検出可能とすべき対象物との相対速度の下限をVmin とした場合、ΔD/Vmin 以上に設定する必要がある。つまり、相対速度の小さい対象物の検出精度を確保しようとすると、必然的に初期検出時間が長くなってしまい、特に、認識の信頼性をより向上させるためのマージンなども含めると、初期検出時間は更に長くなってしまうのである。
【0009】
本発明は、上記問題点を解決するために、相対速度の小さな対象物を検出する際の精度、及び相対速度の大きな対象物を検出する際の応答性のいずれにも優れたFMCWレーダ装置を提供することを目的とする。
【0010】
【課題を解決するための手段】
上記目的を達成するための発明である請求項1乃至11いずれか記載のFMCWレーダ装置では、ピーク周波数検出手段が、ビート信号から信号強度がピークとなる信号成分の周波数であるピーク周波数を検出し、その検出した上り変調部のピーク周波数及び下り変調部のピーク周波数の中から、対象物情報演算手段が、確定対象物に対応するピーク周波数の組合せを抽出し、そのピーク周波数の組合せであるピークペアに基づいて確定対象物との距離及び相対速度を表す対象物情報を求める。これと共に、新規対象物検出手段が、対象物情報演算手段が抽出するピークペア以外のピーク周波数に基づいて、確定対象物とは異なる新規の対象物を検出する。なお、これらの処理は、測定サイクル毎に繰り返し実行される。
【0011】
このうち新規対象物検出手段では、仮ピークペア設定手段が、対象物情報演算手段にて抽出されたピークペア以外のピーク周波数について、上り変調部のピーク周波数と下り変調部のピーク周波数とを組み合わせてなる仮ピークペアを設定し、連続性判定手段が、その仮ピークペアから特定される仮対象物と、既に設定されている継続仮対象物との連続性を判定する。
【0012】
そして、新規対象物抽出手段が、その継続対象物のうち、予め設定された合否判定時間の間連続して、連続性判定手段にて仮対象物との連続性が繰り返し肯定されてきたものを新規の対象物として抽出する。この抽出された新規の対象物が、次回の測定サイクルでは確定対象物として、対象物情報演算手段での処理対象に追加される。
【0013】
また、継続仮対象物設定手段は、連続性判定手段にて継続仮対象物との連続性が否定された仮対象物を、新規の継続仮対象物として設定し、その新規の継続仮対象物についての合否判定時間を、合否判定時間設定手段が、その新規の継続仮対象物に対応する仮ピークペアから得られる情報に基づいて設定する。
【0014】
つまり、この新規の継続仮対象物と、新規対象物抽出手段にて仮対象物との連続性は肯定されたが合否判定時間には満たない継続対象物とが、次回の測定サイクルでは、上述の既に設定された継続仮対象物として、連続性判定手段での処理対象となる。
【0015】
このように、本発明のFMCWレーダ装置では、仮対象物が実際の対象物であることを確認するのに要する合否判定時間を、仮ピークペアから得られる情報、即ち、仮対象物との距離や相対速度等に基づいて設定するようにされている。つまり、その情報から判明する仮対象物の挙動に応じて、例えば、衝突等の危険性の高い仮対象物は合否判定時間を短くすることで高い応答性を確保し、また、危険性の低い仮対象物は合否判定時間を長くすることで高い信頼性を確保することが可能となる。
【0017】
そして、特に、請求項1記載のFMCWレーダ装置は、車両に搭載されたものであり、合否判定時間設定手段は、新規の継続仮対象物が自車線上にある場合に、前記合否判定時間を小さく設定する。これは、自車線上にある対象物は、他車線上にある対象物より、衝突等の危険性が高いと考えられるため有効である。
【0018】
また、請求項2又は請求項3記載のFMCWレーダ装置では、合否判定時間設定手段は、合否判定時間をTg、仮ピークペアから仮対象物との距離を求める際の距離分解能をΔD、新規の継続仮対象物との相対速度をV、任意の係数をK、任意の余裕時間をTcとして、合否判定時間Tgを、次式
Tg=K・ΔD/V+Tc
に従って設定する。
【0019】
この式によれば、相対速度Vが大きいほど、合否判定時間Tgを短くすることができ、また、係数K及び余裕時間Tcを増減することにより、相対速度V以外の要因でも、合否判定時間Tgを調整することができる。但し、Tg<ΔD/Vとなることのないように、K≧1,Tc≧0であることが望ましい。
【0020】
次に、請求項4又は請求項5記載のFMCWレーダ装置では、新規対象物抽出手段は、仮対象物との連続性は肯定されたが合否判定時間には満たない継続対象物が一つだけ存在する場合に、その継続仮対象物を直ちに新規の対象物として抽出し、また、請求項6又は請求項7記載のFCWレーダ装置では、継続仮対象物設定手段は、新規の継続仮対象物が一つだけ存在する場合に、その継続仮対象物を直ちに新規の対象物として抽出する。
【0021】
つまり、継続仮対象物が一つしかなく、これに対応する仮ピークペアの組み合わせが正しいことが明らかである場合には、合否判定時間の経過を待つことなく、直ちに新規の対象物、即ち確定対象物として抽出されることになる。従って、本発明によれば、確定対象物についての対象物情報の出力が無意味に遅れたり、実行しなくてもよい不必要な処理のために処理能力が費やされてしまうことを防止できる。
【0022】
また、請求項8記載のように、合否判定時間設定手段は、仮ピークペアから算出される新規の継続仮対象物との相対速度が大きいほど、合否判定時間を小さく設定してもよい。
これは、急接近している危険性の高い対象物ほど、大きな相対速度を持ち、このような対象物を検出する際には高い応答性が要求されるからである。しかも、相対速度が大きい対象物(継続仮対象物)ほど、距離分解能幅だけ移動するのに要する時間は短くなるため、相対速度が大きい時に合否判定時間を短く設定しても、合否合否判定時間(初期検出時間)が一定である従来装置と比較して、対象物の検出精度が大きく低下することはない。
また、連続性判定手段は、請求項9記載のように、仮対象物情報演算手段が求めた仮対象物情報の中で、前回の測定サイクルの時に予測情報演算手段が求めた予測情報と、予め設定された許容範囲内で一致するものがある場合に、この仮対象物情報に対応する仮対象物と、予測情報に対応する継続仮対象物との連続性を肯定するように構成してもよい。
【0023】
この場合、許容範囲は、請求項10記載のように、仮対象物情報演算手段での仮対象物情報の演算値の分解能以上に設定されていることが望ましい。即ち、仮対象物の相対速度が小さく、次の測定サイクルまでに、距離分解能以上移動することができない場合でも、これを連続性なしとして消去されてしまうことがないようにするためである。
【0024】
また、連続性判定手段は、請求項11記載のように、ピークペア設定手段が設定する仮ピークペアの中に、前回の測定サイクルの時に予測ペア演算手段が求めた予測ピークペアと、予め設定された許容範囲内で一致するものがある場合に、その仮ピークペアにて特定される仮対象物と、予測ピークペアに対応する継続仮対象物との連続性を肯定するように構成してもよい。
【0025】
ところで、請求項1乃至請求項11いずれか記載のFMCWレーダ装置を構成する各手段は、請求項12記載のように、コンピュータを機能させるためのプログラムとして構成してもよい。
この場合、そのプログラムを、例えば、FD,MO,DVD,CD−ROM,ハードディスク,メモリカード等のコンピュータ読み取り可能な記録媒体に記憶し、その記憶したプログラムを必要に応じてコンピュータシステムにロードして起動することにより用いることができる。この他、ROMやバックアップRAMをコンピュータ読み取り可能な記録媒体としてプログラムを記録しておき、このROM或いはバックアップRAMをコンピュータシステムに組み込んで用いてもよい。また、プログラムは、記録媒体に記憶されたものに限らず、ネットワークを介してロードして起動することにより用いてもよい。
【0026】
【発明の実施の形態】
以下に本発明の実施形態を図面と共に説明する。
図1は、本実施形態における車載用のFMCWレーダ装置の全体構成を表すブロック図である。
【0027】
図1に示すように、本実施形態のFMCWレーダ装置2は、変調信号Smに応じて所定の周波数に変調されたレーダ波を送信する送信器12、送信器12から放射され、対象物に反射されたレーダ波を受信する受信器14を備えた送受信部10と、送信器12に変調信号Smを供給すると共に、受信器14から出力される中間周波のビート信号Bに基づき、対象物を検出するための処理を実行する信号処理部20とにより構成されている。
【0028】
そして、本実施形態では、当該装置2によって自動車前方の対象物を検出するために、送受信部10が自動車の前面に取り付けられ、信号処理部20が、車室内又は車室近傍の所定位置に取り付けられている。
ここで、まず送信器12は、送信信号として、ミリ波帯の高周波信号を生成する電圧制御発振器(VCO)12bと、変調信号Smを電圧制御発振器12bの調整レベルに変換して電圧制御発振器12bに供給する変調器(MOD)12aと、電圧制御発振器12bからの送信信号を電力分配して受信器14に供給するローカル信号を生成する電力分配器(COUP)12cと、送信信号に応じてレーダ波を放射する送信アンテナ12dとにより構成されている。
【0029】
また、受信器14は、レーダ波を受信する受信アンテナ14aと、受信アンテナ14aからの受信信号に電力分配器12cからのローカル信号を混合するミキサ(MIX)14bと、ミキサ14bの出力を増幅する前置増幅器(AMP)14cと、前置増幅器14cの出力から不要な高周波成分を除去し、送信信号及び受信信号の周波数の差成分であるビート信号Bを抽出するローパスフィルタ(LPF)14dと、ビート信号Bを必要な信号レベルに増幅する後置増幅器(AMP)14eとにより構成されている。
【0030】
一方、信号処理部20は、起動信号C1により起動され、三角波状の変調信号Smを発生する三角波発生器22と、起動信号C2により起動され、受信器14からのビート信号BをデジタルデータDに変換するA/D変換器24と、CPU26a,ROM26b,RAM26cを中心に構成され、起動信号C1,C2を送出して三角波発生器22及びA/D変換器24を動作させると共に、A/D変換器24を介して得られるデジタルデータDに基づき対象物との距離、相対速度の検出を行う対象物検出処理を実行する周知のマイクロコンピュータ(以下「マイコン」という)26と、マイコン26の指令に基づき高速フーリエ変換(FFT)の演算を実行する演算処理装置28とにより構成されている。
【0031】
なお、A/D変換器24は、起動信号C2により動作を開始すると、所定時間間隔毎にビート信号BをA/D変換して、RAM26cの所定領域に書き込むと共に、所定回数のA/D変換を終了すると、RAM26c上に設定された終了フラグ(図示せず)をセットして、動作を停止するように構成されている。
【0032】
そして、起動信号C1により三角波発生器22が起動され、変調器12aを介して電圧制御発振器12bに変調信号Smが入力されると、電圧制御発振器12bは、変調信号Smの三角波状の波形の上り勾配に応じて周波数が増大(以後、この区間を「上り変調部」と呼ぶ)し、それに引き続く下り勾配に応じて周波数が減少(以後、この区間を「下り変調部」と呼ぶ)するように変調された送信信号を出力する。
【0033】
また、本実施形態では、送信アンテナ12dと受信アンテナ14aとを左右に動かして方位を特定するスキャニングレーダ装置に関するものである。なお、方位の特定方法としては、これに限定されるものではなく、例えば、受信アンテナ14aを複数設置し、位相差によって方位を特定する位相差モノパルスレーダ装置等によっても可能である。
【0034】
ここで図2は、送信信号の変調状態を表す説明図である。
図2に示すように、変調信号Smにより、送信信号の周波数は、1/fmの期間にΔFだけ増減するように変調され、その変化の中心周波数はf0である。なお、200ms間隔で周波数が変調されているのは、後述する対象物検出処理が、200ms周期で実行されるからである。
【0035】
この送信信号に応じたレーダ波が送信器12から送出され、対象物に反射したレーダ波が、受信器14にて受信される。すると、受信器14では、受信アンテナ14aから出力される受信信号と、送信器12からの送信信号とが混合されることにより、ビート信号Bが生成される。なお、受信信号は、レーダ波が対象物までの間を往復する時間だけ送信信号に対して遅延し、且つ、対象物との間に相対速度がある場合には、これに応じてドップラシフトを受ける。このため、ビート信号Bは、この遅延成分とドップラ成分とを含んだものとなる。
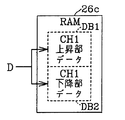
【0036】
そして、図3に示すように、A/D変換器24によりビート信号BをA/D変換してなるデジタルデータDは、RAM26c上のデータブロックDB1,DB2に順次格納される。ところで、A/D変換器24は、三角波発生器22の起動と共に起動され、変調信号Smが出力されている間に、所定回数のA/D変換を行うようにされているため、データブロックDB1には、送信信号の上り変調部に対応した上り変調部データが格納され、データブロックDB2には、送信信号の下り変調部に対応した下り変調部データが格納されることになる。
【0037】
このようにして各データブロックDB1,DB2に格納されたデータは、マイコン26及び演算処理装置28にて処理され、対象物の検出のために使用される。
次に、マイコン26のCPU26aにて実行される対象物検出処理を、図4に示すフローチャートに沿って説明する。なお、この対象物検出処理は、前述したように200ms周期(測定サイクル)で起動される。
【0038】
本処理が起動されると、まず、ステップ(以下単に「S」と記す)110では、RAM26cに格納されたデジタルデータDを読み出し、続くS120では、データブロックDB1,DB2のデータ毎に、そのデータ、即ち上り変調部データ及び下り変調部データを演算処理装置28に入力して、高速フーリエ変換(FFT)の演算を実行させる。
【0039】
なお、演算処理装置28に入力されるデータは、FFTの演算により表れるサイドローブを抑制するために、ハニング窓や三角窓等を用いた周知のウィンドウ処理が施される。そして、その演算結果として、演算処理装置28からは、各周波数毎の複素ベクトルが得られる。
【0040】
続くS130では、複素ベクトルの絶対値、即ちその複素ベクトルが示す周波数成分の振幅に基づき、周波数スペクトル上でピークとなる全ての信号成分を検出して、その周波数をピーク周波数として特定する。つまり、ビート信号の信号成分の中で、対象物からの反射波に基づくものと考えられる信号成分の周波数を全て特定する。
【0041】
続くS140では、既に検出されている対象物(以下「確定対象物」という)に対して実行する確定対象物処理を実行する。
この確定対象物処理では、先のS130で求めたピーク周波数の中に、前回の測定サイクルの際に各確定対象物毎に求めた予測ピークペア(後述する)と、予め設定された許容範囲内で一致するものがあれば、これを、その確定対象物からの反射波により発生したもの(ピークペア)として抽出し、その抽出したピークペアに基づいて確定対象物との距離D及び相対速度Vからなる対象物情報を算出する。なお、距離D及び相対速度Vの算出には、上り変調部のピーク周波数をfb1、下り変調部のピーク周波数をfb2として、上述の(1)(2)式を用いればよい。
【0042】
更に、全ての確定対象物について、その算出された対象物情報に基づいて、確定対象物が、次回の測定サイクルの際に検出されるべき状態を表す予測情報を求め、その予測情報に基づいて検出されるべき一対のピーク周波数を表す予測ピークペアを算出する。
【0043】
続くS150では、S130で求めたピーク周波数のうち、S140にて抽出されたピークペア以外のものについて、上り変調部のピーク周波数と下り変調部のピーク周波数とを組み合わせてなる組み合わせリストを作成する。例えば、上り変調部及び下り変調部のそれぞれにピーク周波数が3個ずつ存在する場合、組み合わせの数は全部で9通りである。このようにして組み合わされたピーク周波数のペアを、以下では仮ピークペアとも呼ぶ。
【0044】
ここでは、全ての組み合わせを求めているが、過去の履歴、対象物の運動状態等を考慮して、例えば、路側物など検出の必要のないものからの反射波に基づくものであることが明らかである場合には、そのピーク周波数を削除して、組み合わせを減らすようにしてもよい。
【0045】
続くS160では、仮ピークペアにて特定される仮対象物が実在するものと仮定し、全ての仮ピークぺアについて、その仮対象物についての対象物情報(以下「仮対象物情報」という)を求める。
なお、この演算の結果、仮対象物情報が、通常ではあり得ない値となった場合には、その仮対象物(仮ピークペア)を削除してもよい。
【0046】
続くS170では、仮ピークペアが、同一の対象物に基づくピーク周波数を正しく組み合わせたものであるか否かを判定する組合せ合否判定処理を実行する。この組合せ合否判定処理の詳細を、図5に示すフローチャートに沿って説明する。
【0047】
本処理が起動されると、まず、S210では、今回の測定サイクルで、後述する処理S220〜S290を実行していない未処理の継続仮対象物が有るか否かを判断し、そのような未処理の継続仮対象物がなければ、そのまま本処理を終了する。
【0048】
一方、未処理の継続仮対象物がある場合、S220に移行して、未処理の継続仮対象物の中の一つを抽出し、続くS230では、その抽出した継続仮対象物(以下、本処理の説明中では「処理対象の継続仮対象物」という)と、先のS150にて設定した仮ピークペアにて特定される仮対象物のそれぞれとの間に、連続性があるか否かを判定する連続性判定処理を実行する。
【0049】
この連続性判定処理では、処理対象の継続仮対象物について、前回の測定サイクルで求められたその継続仮対象物の予測情報(距離及び相対速度の予測値)と、先のS160で求めた仮対象物情報とを比較し、予め設定された許容範囲内で一致した場合に、両者の連続性を肯定する。
【0050】
なお、仮対象物情報を構成する距離及び相対速度は、それぞれ送受信するレーダ波の仕様や、マイコンでのデータの取扱方法(ビット幅等)で決定される距離分解能ΔD,速度分解能ΔVの倍数になっているため、上述の許容範囲は、これらの分解能以上に設定されている。
【0051】
続くS240では、上記連続性判定処理の結果、処理対象の継続仮対象物との連続性が肯定された仮対象物があったか否かを判断し、連続性が肯定された仮対象物がある場合には、S250に移行して、処理対象の継続仮対象物について設定された連続サイクル数CCをインクリメント(CC←CC+1)する。
【0052】
続くS260では、その連続サイクル数CCが、処理対象の継続仮対象物について設定された合否判定サイクル数JC以上であるか否かを判断する。
そして、連続サイクル数CCが合否判定サイクル数JC以上である場合には、S270に移行し、処理対象の継続仮対象物を、確定対象物として登録(継続仮対象物としての登録は削除)し、連続性が肯定された仮対象物の対象物情報に基づいて、次回の測定サイクルで検出されるべき予測ピークペアを求めて、S210に戻る。
【0053】
また、S260にて、連続サイクル数CCが合否判定サイクル数JC未満であると判定された場合には、S280に移行し、継続仮対象物としての登録を継続させるものとして、処理対象の継続対象物との連続性があると判定された仮対象物の仮対象物情報に基づいて、その継続仮対象物が、次回の測定サイクルのときにあるべき状態(距離及び相対速度の予測値)を表す予測情報を算出した後、S210に戻る。
【0054】
また、先のS240にて、処理対象の継続仮対象物について、連続性が肯定された仮対象物が一つもないと判定された場合には、S290に移行し、その処理対象の継続仮対象物の登録を削除してS210に戻る。
つまり、組合せ合否判定処理では、合否判定サイクル数の間連続して、仮対象物との連続性が肯定された継続仮対象物については、これを確定対象物として認め、合否判定サイクルに達するまでに、仮対象物との連続性が否定された継続仮対象物については、先の測定サイクルで、その継続仮対象物の元となった仮ピークペアの組合せは誤りであったとして削除するようにされている。
【0055】
この組合せ合否判定処理が終了すると、図4に戻り、続くS180では、先のS170にて継続仮対象物との連続性が否定され仮対象物を、新規の継続仮対象物として登録する継続仮対象物登録処理を実行する。
この継続仮対象物登録処理の詳細を、図6に示すフローチャートに沿って説明する。
【0056】
本処理が起動されると、まずS410では、継続仮対象物との連続性が否定された仮対象物のうち、今回の測定サイクルで、後述する処理S420〜S460を実行していない未処理の仮対象物が有るか否かを判断し、そのような未処理の仮対象物がなければ、そのまま本処理を終了する。
【0057】
一方、未処理の仮対象物がある場合、S420に移行して、未処理の仮対象物の中の一つを抽出し、続くS430では、その抽出した仮対象物を新規の継続仮対象物(以下、本処理の説明中では「処理対象の継続仮対象物」という)として登録する。
【0058】
続く、S440では、その処理対象の継続仮対象物についての合否判定サイクル数JCを設定する。
この場合、対象物情報として求められる距離Dの距離分解能をΔD、処理対象の継続仮対象物について先のS160にて求められた相対速度をVとして、合否判定時間Tgを(3)式により算出し、更に、測定サイクルの周期をΔtとして、合否判定サイクル数JCを(4)式により算出する。
【0059】
Tg=K・ΔD/V+Tc (3)
JC=[Tg/Δt] (4)
なお(3)式において、K(≧1)は任意の係数、Tc(≧0)は任意の余裕時間であり、本実施形態では、K=1,Tc=0とする。また(4)式において、[x]はxの小数点以下を切り上げることを意味する。つまり、nを非負の整数として、n・Δt<Tg<(n+1)・Δtならば、JC=n+1となる。
【0060】
但し、JCには上限が設けられており、処理対象の継続仮対象物との相対速度Vが0、もしくは0に限りなく近い場合に(例えば追従走行中における前方車両や、停車中における路側物との相対速度)、合否判定サイクル数JCが大きくなり過ぎないようにされている。
【0061】
続くS450では、処理対象の継続仮対象物について、仮対象物との連続性が肯定された回数を表す連続サイクル数CCをゼロクリアし、更にS460では、処理対象の継続仮対象物について、先のS160にて求めた仮対象物情報に基づいて予測情報を求めて、S410に戻る。
【0062】
つまり、継続仮対象物設定処理では、既に登録されている継続仮対象物との連続性が否定された全ての仮対象物を、新規の継続仮対象物として登録し、登録したそれぞれの継続仮対象物について、組合せ合否判定処理で必要となる合否判定サイクル数JCや予測情報の設定、連続サイクル数CCの初期化を行うようにされている。
【0063】
この継続仮対象物設定処理が終了すると、図4に戻り、続くS190では、先のS140にて算出された対象物情報、及びS270にて新たに確定対象物とされたものについての対象物情報(S160にて算出された仮対象物情報)を出力して本処理を終了する。
【0064】
このようにして本実施形態のFMCWレーダ装置2から出力された対象物情報は、例えば、別途実行される判断処理において、危険の有無を判断するため等に使用され、危険ありと判断された場合には、図示しない警報器を鳴動させて運転者に危険を知らせるといった処理や、自車両と同一車線を走行する先行車両に追従して走行するオートクルーズ制御などに使用される。
【0065】
ここで、例えば、測定サイクルがΔt=200ms、距離分解能がΔD=1mであり、距離が100mの位置に、相対速度の小さい仮対象物A(V=−5km/h)と、相対速度の大きい仮対象物B(V=−80km/h)とが検出された場合を考える。
【0066】
仮対象物Aの場合、合否判定時間はTg=720msであり、従って合否判定サイクル数はJC=4に設定される。また、仮対象物Aは、次回の測定サイクルまでに約0.28m移動し、相対速度は殆ど変化しないと予測されるため、予測情報は、R=100.28m,V=−5km/hとなる。
【0067】
一方、仮対象物Bの場合、合否判定時間はTg=45msであり、従って合否判定サイクル数はJC=1に設定される。また、仮対象物Bは、次回の測定サイクルまでに約4.44m移動し、相対速度は殆ど変化しないと予測されるため、予測情報は、R=104.44m,V=−80km/hとなる。
【0068】
そして、仮対象物の連続性の判定は、上述したように、次の測定サイクルの時に、予測情報と許容範囲内で一致するものが存在するか否かで判定される。しかし、図7に示すように、相対速度の小さい仮対象物Aの場合、次の測定サイクルとなる200ms後での移動距離は、上述の予測値(0.28m)程度であり、距離分解能ΔDに満たないため、予測した距離に仮対象物があるのかを判定することができない。ところが、上述の合否判定サイクル数(JC=4)だけ後の測定サイクル、即ち800ms(=Δt×JC)後であれば、その移動距離は、予測値の4倍の1.12m程度であり、距離分解能を越えているため、予測した距離に仮対象物があるか否かの判定が可能となるのである。
【0069】
一方、相対速度の大きい仮対象物Bの場合、次の測定サイクルとなる200ms後での移動距離は、上述の予測値(4.44m)程度であり、距離分解能ΔDを越えているため、直ちに、予測した距離に仮対象物があるか否かの判定が可能となる。
【0070】
このように、最初に仮対象物として検出されてから、本物の対象物(確定対象物)であるとして、対象物情報が出力されるまでに、仮対象物Aでは4サイクル分の時間(800ms)を必要とし、仮対象物Bでは1サイクル分の時間(200ms)を必要とする。つまり、相対速度の大きい仮対象物Bを検出する際には、その検出精度を低下させることなく、3サイクル分もの時間(即ち600ms)を短縮でき、応答性の良い検出が可能となる。
【0071】
また、従来装置のように、合否判定サイクル数が一定である場合には、図8(a)に示すように、相対速度の大小、即ち危険の有無に関係なく、一定時間を経過しなければ対象物情報が出力されないが、本実施形態のように、合否判定サイクル数を相対速度に応じて可変設定した場合には、図8(b)に示すように、仮対象物として検出された順番に関わりなく、相対速度の大きいものほど速やかに対象物情報が得られることになる。
【0072】
以上説明したように、本実施形態のFMCWレーダ装置2では、仮対象物が実際の対象物であることを確認するのに要する合否判定サイクル数JC(又は合否判定時間Tg)が、その仮対象物との相対速度等が大きいほど、小さく設定されるため、相対速度の大きい仮対象物、例えば急速に接近する危険性の高い仮対象物に対する応答性の良い検出と、相対速度の小さい仮対象物、例えば緩やかに接近する危険性の低い仮対象物に対する確実な検出とを両立させることができる。
【0073】
なお、上記実施形態において、S110〜S130がピーク周波数検出手段、S140が対象物情報演算手段、S150〜S180が新規対象物検出手段に相当し、特に、S150が仮ピークペア設定手段、S210〜S240が連続性判定手段、S250〜S280が新規対象物抽出手段、S410〜S430が継続仮対象物設定手段、S440が合否判定時間設定手段、S160が仮対象物情報演算手段、S280,S460が予測情報演算手段に相当する。
【0074】
ところで、上記実施形態では、継続仮対象物と仮対象物との連続性を判定する際に、連続サイクル数CCが合否判定サイクル数JCに達するまでに、一度でも連続性が否定された場合には、継続仮対象物の登録を削除するようにされているが、仮対象物の信頼性(受信強度、ピーク数)により補間等の操作をすることによって、サイクルの連続性が必ずしも完全でなくても、継続仮対象物の登録を継続するように構成してもよい。
【0075】
また、上記実施形態では、継続仮対象物と仮対象物との連続性を判定する際に、予測情報を用いているが、確定対象物に対応するピークペアを抽出する場合と同様に、予測ピークペアを求め、これをピーク周波数と直接比較することで連続性を判定するように構成してもよい。
【0076】
更に、上記実施形態では、相対速度に応じて合否判定サイクル数JCを可変設定しているが、例えば、仮対象物の方位を求めることが可能である場合、その方位から、仮対象物が自車線上にあるか否かを判断し、自車線上にある時には、係数Kや余裕時間Tcを小さくすることで、合否判定サイクル数JCを小さくし、応答性の良い対象物の検出が可能となるように構成してもよい。
【0077】
また、上記実施形態の組合せ合否判定処理において、処理すべき継続仮対象物が一つしか存在しない場合、又は上記実施形態の継続仮対象物登録処理において、処理すべき仮対象物が一つしか存在しない場合には、これらを直ちに確定対象物として登録するように構成してもよい。
【図面の簡単な説明】
【図1】 実施形態のFMCWレーダ装置の構成を表すブロック図である。
【図2】 送信信号の周波数変化を表すグラフである。
【図3】 RAMに格納されるデータを表す説明図である。
【図4】 対象物検出処理の内容を表すフローチャートである。
【図5】 組合せ合否判定処理の内容を表すフローチャートである。
【図6】 継続仮対象物登録処理の内容を表すフローチャートである。
【図7】 実施形態のFMCWレーダ装置の動作及び効果を表すための説明図である。
【図8】 実施形態のFMCWレーダ装置の効果を表すための説明図である。
【符号の説明】
2…FMCWレーダ装置、10…送受信部、12…送信器、12a…変調器、12b…電圧制御発振器、12c…電力分配器、12d…送信アンテナ、14…受信器、14a…受信アンテナ、14b…ミキサ、14c…前置増幅器、14d…ローパスフィルタ、14e…後置増幅器、20…信号処理部、22…三角波発生器、24…A/D変換器、26…マイクロコンピュータ、28…演算処理装置。
Claims (12)
- 周波数が漸次上昇する上り変調部及び周波数が漸次下降する下り変調部を有するレーダ波の送信信号と、対象物により反射された前記レーダ波の受信信号とを混合することにより得られるビート信号から、信号強度がピークとなる信号成分の周波数であるピーク周波数を検出するピーク周波数検出手段と、
該ピーク周波数検出手段が検出する前記上り変調部のピーク周波数及び前記下り変調部のピーク周波数の中から、既に検出されている対象物である確定対象物に対応するピーク周波数の組合せを抽出し、該ピーク周波数の組合せであるピークペアに基づいて前記確定対象物との距離及び相対速度を表す対象物情報を求める対象物情報演算手段と、
前記確定対象物に対応するピークペア以外のピーク周波数に基づいて、前記確定対象物とは異なる新規の対象物を検出する新規対象物検出手段と、
を備え、予め設定された測定サイクル毎に前記確定対象物についての対象物情報を出力する車両に搭載されたFMCWレーダ装置において、
前記新規対象物検出手段は、
前記対象物情報演算手段にて抽出されたピークペア以外のピーク周波数について、前記上り変調部のピーク周波数と前記下り変調部のピーク周波数とを組み合わせてなる仮ピークペアを設定する仮ピークペア設定手段と、
該仮ピークペア設定手段が設定する仮ピークペアから特定される仮対象物と、既に設定されている継続仮対象物との連続性を判定する連続性判定手段と、
前記継続仮対象物のうち、予め設定された合否判定時間の間連続して、前記連続性判定手段にて前記仮対象物との連続性が繰り返し肯定されたものを、前記新規の対象物として抽出する新規対象物抽出手段と、
前記連続性判定手段にて前記継続仮対象物との連続性が否定された仮対象物を新規の継続仮対象物として設定する継続仮対象物設定手段と、
該継続仮対象物設定手段が設定する新規の継続仮対象物についての前記合否判定時間を、該新規の継続仮対象物に対応する仮ピークペアから得られる情報に基づいて設定する合否判定時間設定手段と、
を備え、
前記合否判定時間設定手段は、前記新規の継続仮対象物が自車線上にある場合に、前記合否判定時間を小さく設定することを特徴とするFMCWレーダ装置。 - 前記合否判定時間設定手段は、前記合否判定時間をTg、前記仮ピークペアから距離を求める際の距離分解能をΔD、前記新規の継続仮対象物との相対速度をV、任意の余裕時間をTcとして、前記合否判定時間Tgを、次式
Tg=ΔD/V+Tc
に従って設定することを特徴とする請求項1記載のFMCWレーダ装置。 - 周波数が漸次上昇する上り変調部及び周波数が漸次下降する下り変調部を有するレーダ波の送信信号と、対象物により反射された前記レーダ波の受信信号とを混合することにより得られるビート信号から、信号強度がピークとなる信号成分の周波数であるピーク周波数を検出するピーク周波数検出手段と、
該ピーク周波数検出手段が検出する前記上り変調部のピーク周波数及び前記下り変調部のピーク周波数の中から、既に検出されている対象物である確定対象物に対応するピーク周波数の組合せを抽出し、該ピーク周波数の組合せであるピークペアに基づいて前記確定対象物との距離及び相対速度を表す対象物情報を求める対象物情報演算手段と、
前記確定対象物に対応するピークペア以外のピーク周波数に基づいて、前記確定対象物とは異なる新規の対象物を検出する新規対象物検出手段と、
を備え、予め設定された測定サイクル毎に前記確定対象物についての対象物情報を出力するFMCWレーダ装置において、
前記新規対象物検出手段は、
前記対象物情報演算手段にて抽出されたピークペア以外のピーク周波数について、前記上り変調部のピーク周波数と前記下り変調部のピーク周波数とを組み合わせてなる仮ピークペアを設定する仮ピークペア設定手段と、
該仮ピークペア設定手段が設定する仮ピークペアから特定される仮対象物と、既に設定されている継続仮対象物との連続性を判定する連続性判定手段と、
前記継続仮対象物のうち、予め設定された合否判定時間の間連続して、前記連続性判定手段にて前記仮対象物との連続性が繰り返し肯定されたものを、前記新規の対象物として抽出する新規対象物抽出手段と、
前記連続性判定手段にて前記継続仮対象物との連続性が否定された仮対象物を新規の継続仮対象物として設定する継続仮対象物設定手段と、
該継続仮対象物設定手段が設定する新規の継続仮対象物についての前記合否判定時間を、該新規の継続仮対象物に対応する仮ピークペアから得られる情報に基づいて設定する合否判定時間設定手段と、
を備え、
前記合否判定時間設定手段は、前記合否判定時間をTg、前記仮ピークペアから距離を求める際の距離分解能をΔD、前記新規の継続仮対象物との相対速度をV、任意の余裕時間をTcとして、前記合否判定時間Tgを、次式
Tg=ΔD/V+Tc
に従って設定することを特徴とするFMCWレーダ装置。 - 前記新規対象物抽出手段は、前記仮対象物との連続性は肯定されたが前記合否判定時間には満たない継続対象物が一つだけ存在する場合に、該継続仮対象物を直ちに新規の対象物として抽出することを特徴とする請求項1乃至請求項3いずれか記載のFMCWレーダ装置。
- 周波数が漸次上昇する上り変調部及び周波数が漸次下降する下り変調部を有するレーダ波の送信信号と、対象物により反射された前記レーダ波の受信信号とを混合することにより得られるビート信号から、信号強度がピークとなる信号成分の周波数であるピーク周波数を検出するピーク周波数検出手段と、
該ピーク周波数検出手段が検出する前記上り変調部のピーク周波数及び前記下り変調部のピーク周波数の中から、既に検出されている対象物である確定対象物に対応するピーク周波数の組合せを抽出し、該ピーク周波数の組合せであるピークペアに基づいて前記確定対象物との距離及び相対速度を表す対象物情報を求める対象物情報演算手段と、
前記確定対象物に対応するピークペア以外のピーク周波数に基づいて、前記確定対象物とは異なる新規の対象物を検出する新規対象物検出手段と、
を備え、予め設定された測定サイクル毎に前記確定対象物についての対象物情報を出力するFMCWレーダ装置において、
前記新規対象物検出手段は、
前記対象物情報演算手段にて抽出されたピークペア以外のピーク周波数について、前記上り変調部のピーク周波数と前記下り変調部のピーク周波数とを組み合わせてなる仮ピークペアを設定する仮ピークペア設定手段と、
該仮ピークペア設定手段が設定する仮ピークペアから特定される仮対象物と、既に設定されている継続仮対象物との連続性を判定する連続性判定手段と、
前記継続仮対象物のうち、予め設定された合否判定時間の間連続して、前記連続性判定手段にて前記仮対象物との連続性が繰り返し肯定されたものを、前記新規の対象物として抽出する新規対象物抽出手段と、
前記連続性判定手段にて前記継続仮対象物との連続性が否定された仮対象物を新規の継続仮対象物として設定する継続仮対象物設定手段と、
該継続仮対象物設定手段が設定する新規の継続仮対象物についての前記合否判定時間を 、該新規の継続仮対象物に対応する仮ピークペアから得られる情報に基づいて設定する合否判定時間設定手段と、
を備え、
前記新規対象物抽出手段は、前記仮対象物との連続性は肯定されたが前記合否判定時間には満たない継続対象物が一つだけ存在する場合に、該継続仮対象物を直ちに新規の対象物として抽出することを特徴とするFMCWレーダ装置。 - 前記継続仮対象物設定手段は、前記新規の継続仮対象物が一つだけ存在する場合に、該継続仮対象物を直ちに新規の対象物として抽出することを特徴とする請求項1乃至請求項5いずれか記載のFMCWレーダ装置。
- 周波数が漸次上昇する上り変調部及び周波数が漸次下降する下り変調部を有するレーダ波の送信信号と、対象物により反射された前記レーダ波の受信信号とを混合することにより得られるビート信号から、信号強度がピークとなる信号成分の周波数であるピーク周波数を検出するピーク周波数検出手段と、
該ピーク周波数検出手段が検出する前記上り変調部のピーク周波数及び前記下り変調部のピーク周波数の中から、既に検出されている対象物である確定対象物に対応するピーク周波数の組合せを抽出し、該ピーク周波数の組合せであるピークペアに基づいて前記確定対象物との距離及び相対速度を表す対象物情報を求める対象物情報演算手段と、
前記確定対象物に対応するピークペア以外のピーク周波数に基づいて、前記確定対象物とは異なる新規の対象物を検出する新規対象物検出手段と、
を備え、予め設定された測定サイクル毎に前記確定対象物についての対象物情報を出力するFMCWレーダ装置において、
前記新規対象物検出手段は、
前記対象物情報演算手段にて抽出されたピークペア以外のピーク周波数について、前記上り変調部のピーク周波数と前記下り変調部のピーク周波数とを組み合わせてなる仮ピークペアを設定する仮ピークペア設定手段と、
該仮ピークペア設定手段が設定する仮ピークペアから特定される仮対象物と、既に設定されている継続仮対象物との連続性を判定する連続性判定手段と、
前記継続仮対象物のうち、予め設定された合否判定時間の間連続して、前記連続性判定手段にて前記仮対象物との連続性が繰り返し肯定されたものを、前記新規の対象物として抽出する新規対象物抽出手段と、
前記連続性判定手段にて前記継続仮対象物との連続性が否定された仮対象物を新規の継続仮対象物として設定する継続仮対象物設定手段と、
該継続仮対象物設定手段が設定する新規の継続仮対象物についての前記合否判定時間を、該新規の継続仮対象物に対応する仮ピークペアから得られる情報に基づいて設定する合否判定時間設定手段と、
を備え、
前記継続仮対象物設定手段は、前記新規の継続仮対象物が一つだけ存在する場合に、該継続仮対象物を直ちに新規の対象物として抽出することを特徴とするFMCWレーダ装置。 - 前記合否判定時間設定手段は、前記仮ピークペアから算出される相対速度が大きいほど、前記合否判定時間を小さく設定することを特徴とする請求項1乃至請求項7いずれか記載のFMCWレーダ装置。
- 前記新規対象物検出手段は、
前記仮ピークペア設定手段が設定する仮ピークペアのそれぞれについて、該仮ピークペアにより特定される仮対象物との距離及び相対速度を表す仮対象物情報を求める仮対象物情報演算手段と
該仮対象物情報演算手段が求めた仮対象物情報に基づき、前記継続仮対象物のそれぞれについて、次回の測定サイクルで検出されるべき仮対象物との距離及び相対速度の予測値からなる予測情報を求める予測情報演算手段と、
を備え、
前記連続性判定手段は、前回の測定サイクルで求めた前記予測情報と予め設定された許容範囲内で一致する前記仮対象物情報がある場合に、該仮対象物情報に対応する仮対象物と、前記予測情報に対応する継続仮対象物との連続性を肯定することを特徴とする請求項1乃至請求項8いずれか記載のFMCWレーダ装置。 - 前記許容範囲は、前記仮対象物情報演算手段での仮対象物情報の演算値の分解能以上に設定されていることを特徴とする請求項9記載のFMCWレーダ装置。
- 前記新規対象物検出手段は、
前記仮ピークペア設定手段が設定する仮ピークペアのそれぞれについて、該仮ピークペアにより特定される仮対象物との距離及び相対速度を表す仮対象物情報を求める仮対象物情報演算手段と
該仮対象物情報演算手段が求めた仮対象物情報に基づき、前記継続仮対象物のそれぞれについて、次回の測定サイクルで検出されるべきピーク周波数の組み合わせからなる予測ピークペアを求める予測ペア演算手段と、
を設け、
前記連続性判定手段は、前回の測定サイクルで求めた前記予測ピークペアと、予め設定された許容範囲内で一致する仮ピークペアがある場合に、該仮ピークペアにて特定される仮対象物と、前記予測ピークペアに対応する継続仮対象物との連続性を肯定することを特徴とする請求項1乃至請求項8いずれか記載のFMCWレーダ装置。 - コンピュータを、請求項1乃至請求項11いずれか記載のFMCWレーダ装置を構成する各手段として機能させるためのプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002041633A JP3801068B2 (ja) | 2002-02-19 | 2002-02-19 | Fmcwレーダ装置,プログラム |
| DE10306776A DE10306776B4 (de) | 2002-02-19 | 2003-02-18 | FMCW-Radarsystem und Computerprogramm |
| US10/367,842 US6888494B2 (en) | 2002-02-19 | 2003-02-19 | FMCW radar system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002041633A JP3801068B2 (ja) | 2002-02-19 | 2002-02-19 | Fmcwレーダ装置,プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2003240843A JP2003240843A (ja) | 2003-08-27 |
| JP3801068B2 true JP3801068B2 (ja) | 2006-07-26 |
Family
ID=27678349
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002041633A Expired - Lifetime JP3801068B2 (ja) | 2002-02-19 | 2002-02-19 | Fmcwレーダ装置,プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6888494B2 (ja) |
| JP (1) | JP3801068B2 (ja) |
| DE (1) | DE10306776B4 (ja) |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3719202B2 (ja) * | 2001-11-30 | 2005-11-24 | 株式会社村田製作所 | レーダの特性調整方法 |
| JP2003240842A (ja) * | 2002-02-14 | 2003-08-27 | Murata Mfg Co Ltd | レーダ |
| US20050129843A1 (en) * | 2003-12-11 | 2005-06-16 | Xerox Corporation | Nanoparticle deposition process |
| JP4420743B2 (ja) * | 2004-05-31 | 2010-02-24 | 富士通テン株式会社 | Fm−cwレーダ装置 |
| DE102005012945A1 (de) * | 2005-03-21 | 2006-09-28 | Robert Bosch Gmbh | Verfahren und Vorrichtung zu Abstands- und Relativgeschwindigkeitsmessung mehrerer Objekte |
| US7327308B2 (en) * | 2005-04-28 | 2008-02-05 | Chung Shan Institute Of Science And Technology, Armaments Bureau, M.N.D. | Programmable method and test device for generating target for FMCW radar |
| JP4480632B2 (ja) * | 2005-06-20 | 2010-06-16 | アルパイン株式会社 | 車載レーダ装置 |
| JP4757147B2 (ja) * | 2006-08-24 | 2011-08-24 | 本田技研工業株式会社 | 物体検知装置 |
| JP2008082956A (ja) * | 2006-09-28 | 2008-04-10 | Mazda Motor Corp | 車両の障害物検知装置及びその検知方法 |
| US7474255B2 (en) * | 2006-12-05 | 2009-01-06 | Chung Shan Institute Of Science And Technology, Armaments Bureau, M.N.D. | Target tracking method of radar with frequency modulated continuous wave |
| DE102007004027A1 (de) * | 2007-01-22 | 2008-07-24 | Daubner & Stommel GbR Bau-Werk-Planung (vertretungsberechtigter Gesellschafter: Matthias Stommel, 27777 Ganderkesee) | Windenergieanlage mit Detektionseinrichtung |
| US7612707B2 (en) * | 2007-09-28 | 2009-11-03 | Banner Engineering Corporation | Configurable radar sensor |
| JP5078727B2 (ja) * | 2008-04-23 | 2012-11-21 | 本田技研工業株式会社 | 物体検知装置 |
| JP4843003B2 (ja) * | 2008-08-05 | 2011-12-21 | 富士通テン株式会社 | 信号処理装置、レーダ装置、及び信号処理方法 |
| JP4950959B2 (ja) * | 2008-08-08 | 2012-06-13 | 本田技研工業株式会社 | 車両走行支援装置 |
| US8638254B2 (en) | 2009-08-27 | 2014-01-28 | Fujitsu Ten Limited | Signal processing device, radar device, vehicle control system, signal processing method, and computer-readable medium |
| JP2011069710A (ja) | 2009-09-25 | 2011-04-07 | Fujitsu Ten Ltd | 信号処理装置、レーダ装置、物体検出システム、信号処理方法、および、プログラム |
| JP5402647B2 (ja) * | 2010-01-04 | 2014-01-29 | 富士通株式会社 | 物体検知装置および物体検知プログラム |
| JP5576727B2 (ja) * | 2010-06-30 | 2014-08-20 | 富士通テン株式会社 | 信号処理装置、レーダ装置、車両制御システム、および、信号処理方法 |
| JP5018943B2 (ja) * | 2010-09-07 | 2012-09-05 | 株式会社デンソー | レーダ装置 |
| JP5693906B2 (ja) * | 2010-10-13 | 2015-04-01 | 三菱電機株式会社 | レーダ装置 |
| JP5174880B2 (ja) * | 2010-10-22 | 2013-04-03 | 三菱電機株式会社 | 車載用レーダ装置 |
| JP5709476B2 (ja) * | 2010-11-10 | 2015-04-30 | 富士通テン株式会社 | レーダ装置 |
| CN105891786B (zh) | 2011-10-19 | 2019-07-26 | B·苏博拉曼亚 | 定向速度和距离传感器 |
| US11004337B2 (en) | 2012-12-28 | 2021-05-11 | Balu Subramanya | Advanced parking management system |
| KR101797792B1 (ko) * | 2013-07-05 | 2017-11-14 | 주식회사 만도 | 주파수 변조 연속파 레이더 감지 장치 및 그의 연속파를 이용한 물체 감지 방법 |
| JP6231803B2 (ja) * | 2013-07-30 | 2017-11-15 | 富士通テン株式会社 | レーダ装置、及び、信号処理方法 |
| TWI470257B (zh) | 2013-10-07 | 2015-01-21 | Univ Nat Chiao Tung | 角度估計檢測方法及電子裝置 |
| KR102168359B1 (ko) * | 2013-11-06 | 2020-10-21 | 현대모비스 주식회사 | 차량용 레이더 시스템 및 이의 수신 신호 이득 조절 방법 |
| KR101896725B1 (ko) * | 2013-12-02 | 2018-09-07 | 주식회사 만도 | Fmcw 레이더 기반의 주변 환경 감지 방법 및 장치 |
| JP6313981B2 (ja) * | 2014-01-22 | 2018-04-18 | 株式会社デンソーテン | レーダ装置、車両制御システム、および、信号処理方法 |
| JP2015155807A (ja) * | 2014-02-20 | 2015-08-27 | 富士通テン株式会社 | レーダ装置、車両制御システム、および、信号処理方法 |
| CN103941252B (zh) * | 2014-03-31 | 2016-07-27 | 清华大学 | 基于随机开关阵列天线的调频连续波雷达系统 |
| TWI504916B (zh) * | 2014-04-01 | 2015-10-21 | Wistron Neweb Corp | 調頻連續波雷達感測系統之信號處理方法及信號處理裝置 |
| JP2017215241A (ja) * | 2016-06-01 | 2017-12-07 | 富士通テン株式会社 | 物標検出方法、及び、レーダ装置 |
| JP2017223589A (ja) * | 2016-06-16 | 2017-12-21 | 株式会社デンソーテン | レーダ装置および信号処理方法 |
| KR101908455B1 (ko) * | 2017-01-06 | 2018-10-17 | 비아이에스웍스 주식회사 | 저전력 주파수 변조 연속파 레이더 시스템 및 그 제어 방법 |
| US10571556B2 (en) | 2017-09-18 | 2020-02-25 | United States Of America As Represented By Secretary Of The Navy | Frequency modulated continuous wave radar detector |
| US10473755B1 (en) * | 2017-02-21 | 2019-11-12 | National Technology & Engineering Solutions Of Sandia, Llc | Waveform warping for general frequency-modulated radar waveforms |
| US10473775B2 (en) * | 2017-03-20 | 2019-11-12 | David Slemp | Frequency modulated continuous wave antenna system |
| US11372096B2 (en) * | 2017-03-20 | 2022-06-28 | David Slemp | Frequency modulated continuous wave antenna system |
| WO2019127227A1 (en) * | 2017-12-28 | 2019-07-04 | Intel Corporation | Vehicle sensor fusion |
| RU2716154C1 (ru) * | 2019-09-09 | 2020-03-06 | Акционерное общество научно-внедренческое предприятие "ПРОТЕК" | Устройство компенсации прямого радиолокационного сигнала радиопередатчика в приемнике двухпозиционной радиолокационной системы |
| JP2021099331A (ja) * | 2019-12-20 | 2021-07-01 | 株式会社デンソー | レーダ装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2751647B2 (ja) | 1991-03-26 | 1998-05-18 | トヨタ自動車株式会社 | 車間距離検出装置 |
| JP3627389B2 (ja) * | 1995-09-28 | 2005-03-09 | 株式会社デンソー | レーダ装置 |
| JP3460453B2 (ja) * | 1995-12-11 | 2003-10-27 | 株式会社デンソー | Fmcwレーダ装置 |
| JP3398745B2 (ja) | 1997-08-21 | 2003-04-21 | 三菱電機株式会社 | 車載用レーダ装置 |
| JP4038291B2 (ja) * | 1998-12-11 | 2008-01-23 | 三菱電機株式会社 | レーダ装置 |
| JP3214480B2 (ja) | 1999-01-27 | 2001-10-02 | 日本電気株式会社 | Fm−cwレーダ装置 |
| EP1275977B1 (en) * | 2001-02-21 | 2009-12-09 | Mitsubishi Denki Kabushiki Kaisha | Distance/velocity measuring method and radar signal processing device |
-
2002
- 2002-02-19 JP JP2002041633A patent/JP3801068B2/ja not_active Expired - Lifetime
-
2003
- 2003-02-18 DE DE10306776A patent/DE10306776B4/de not_active Expired - Lifetime
- 2003-02-19 US US10/367,842 patent/US6888494B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| DE10306776B4 (de) | 2013-07-25 |
| DE10306776A1 (de) | 2003-10-02 |
| US6888494B2 (en) | 2005-05-03 |
| US20030156055A1 (en) | 2003-08-21 |
| JP2003240843A (ja) | 2003-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3801068B2 (ja) | Fmcwレーダ装置,プログラム | |
| JP3489514B2 (ja) | Fmcwレーダ装置 | |
| JP3491418B2 (ja) | Fmcwレーダ装置 | |
| US9581682B2 (en) | Frequency modulated continuous wave radar device, and object detection method using continuous wave thereof | |
| US9709674B2 (en) | Radar device and signal processing method | |
| JP3460453B2 (ja) | Fmcwレーダ装置 | |
| JP3988571B2 (ja) | レーダ装置 | |
| US9874634B1 (en) | Radar apparatus | |
| US9372261B2 (en) | Radar device and method of processing signal | |
| US9658327B2 (en) | Radar device and method of processing signal | |
| EP1385020B1 (en) | Fm-cw radar apparatus | |
| JP3753652B2 (ja) | Fm−cwレーダのミスペアリング判定及び信号処理方法 | |
| US9442183B2 (en) | Radar apparatus and signal processing method | |
| JP5097467B2 (ja) | 車載用レーダ装置 | |
| JP2015155807A (ja) | レーダ装置、車両制御システム、および、信号処理方法 | |
| US20150346324A1 (en) | Radar apparatus and signal processing method | |
| US20130268173A1 (en) | Object detecting device, object detecting method, object detecting program, and motion control system | |
| JP2018115930A (ja) | レーダ装置および物標検出方法 | |
| JP2000321352A (ja) | 車載用レーダ装置 | |
| JP2000081480A (ja) | Fmcwレーダ装置及び記録媒体並びに車両制御装置 | |
| JP2010038826A (ja) | 信号処理装置、及びレーダ装置 | |
| JP3496606B2 (ja) | レーダ装置 | |
| JP5116746B2 (ja) | レーダ装置 | |
| JP3709826B2 (ja) | レーダ | |
| JP2016128751A (ja) | レーダ装置、信号処理方法、および、車両制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040526 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20051003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060117 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060302 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060411 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060424 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 3801068 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090512 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100512 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110512 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120512 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120512 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130512 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140512 Year of fee payment: 8 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |