JP5693906B2 - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP5693906B2 JP5693906B2 JP2010230678A JP2010230678A JP5693906B2 JP 5693906 B2 JP5693906 B2 JP 5693906B2 JP 2010230678 A JP2010230678 A JP 2010230678A JP 2010230678 A JP2010230678 A JP 2010230678A JP 5693906 B2 JP5693906 B2 JP 5693906B2
- Authority
- JP
- Japan
- Prior art keywords
- pair
- target
- peak
- distance
- relative speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000605 extraction Methods 0.000 claims description 116
- 230000005540 biological transmission Effects 0.000 claims description 56
- 238000001514 detection method Methods 0.000 claims description 37
- 238000000034 method Methods 0.000 claims description 29
- 238000011835 investigation Methods 0.000 claims description 19
- 239000000284 extract Substances 0.000 description 43
- 230000000630 rising effect Effects 0.000 description 42
- 230000035559 beat frequency Effects 0.000 description 32
- 238000001228 spectrum Methods 0.000 description 26
- 238000010586 diagram Methods 0.000 description 5
- 230000014509 gene expression Effects 0.000 description 3
- 230000001174 ascending effect Effects 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/35—Details of non-pulse systems
- G01S7/352—Receivers
- G01S7/356—Receivers involving particularities of FFT processing
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
fd=fr+fp ・・・(2)
fp=(2・f0/C)・V ・・・(4)
fu−fd=−2fp ・・・(6)
R=M1・fr=M1・(fu+fd)/2 ・・・(7)
V=M2・fp=M2・(−fu+fd)/2 ・・・(8)
M2=C/(2・f0) ・・・(10)
fu=R/M1−V/M2 ・・・(11)
fd=R/M1+V/M2 ・・・(12)
すなわち、特許文献1に記載されたレーダ装置では、上述したように、切り替え前および切り替え後の変調信号の上昇区間および下降区間におけるビート信号のピーク周波数のペア{fu1,fd1}、{fu2,fd2}に基づいて、ターゲットまでの距離およびターゲットとの相対速度が確定される。
そのため、誤ペアリングの発生を防止するとともに、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合であっても、ターゲットまでの距離およびターゲットとの相対速度を得ることができる。
図1は、この発明の実施の形態1に係るレーダ装置を示すブロック構成図である。図1において、このレーダ装置は、ターゲット検出部1、制御電圧発生器2、電圧制御発振器3(VCO:Voltage Controlled Oscillator、以下「VCO3」と称する)、分配器4、送信アンテナ5(送信部)、受信アンテナ6(受信部)、ミキサ7(ミキシング部)、A/Dコンバータ8、および高速フーリエ変換器9(FFT:Fast Fourier Transform、以下「FFT9」と称する)を備えている。
ターゲット検出部1は、ピーク周波数抽出部10、第1ペア距離・相対速度算出部11、第2ペア距離・相対速度算出部12、ターゲット確定部13、今回ターゲット距離・相対速度推定部14、第1ペアピーク周波数推定部15、第2ペアピーク周波数推定部16、第1ペアピーク調査部17、第2ペアピーク調査部18、およびターゲット距離・相対速度算出部19を有している。ここで、今回ターゲット距離・相対速度推定部14、第1ペアピーク周波数推定部15、第2ペアピーク周波数推定部16、第1ペアピーク調査部17、第2ペアピーク調査部18、およびターゲット距離・相対速度算出部19は、ターゲット推定部20を構成している。
VE=VO ・・・(14)
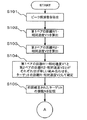
一方、ステップS116において、処理が終了していない(すなわち、No)と判定された場合には、ステップS106に戻って、ステップS106〜ステップS116の処理が繰り返し実行される。
また、ターゲット距離・相対速度算出部は、第1ペアピーク周波数推定部で推定された第1ペアの2つのピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第2ペアピーク周波数推定部で推定された第2ペアの一方のピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第2ペアの他方のピーク周波数がピーク周波数として抽出されていない場合に、第1ペアの2つのピーク周波数に基づいて、ターゲットまでの距離およびターゲットとの相対速度を算出する。
また、ターゲット距離・相対速度算出部は、第2ペアピーク周波数推定部で推定された第2ペアの2つのピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第1ペアピーク周波数推定部で推定された第1ペアの一方のピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第1ペアの他方のピーク周波数がピーク周波数として抽出されていない場合に、第2ペアの2つのピーク周波数に基づいて、ターゲットまでの距離およびターゲットとの相対速度を算出する。
そのため、誤ペアリングの発生を防止するとともに、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合であっても、ターゲットまでの距離およびターゲットとの相対速度を得ることができる。
上記実施の形態1では、第1ペアピーク周波数推定部15で推定された第1ペアの2つのピーク周波数および第2ペアピーク周波数推定部16で推定された第2ペアの2つのピーク周波数のうち、何れか1つのピーク周波数がピーク周波数として抽出されていない場合(図5の場合)について説明した。この実施の形態2では、第1ペアの2つのピーク周波数または第2ペアの2つのピーク周波数が、ピーク周波数として抽出されていない場合(図7の場合)について説明する。なお、この発明の実施の形態2に係るレーダ装置を示すブロック構成図は、上記実施の形態1の図1と同様なので、説明を省略する。
一方、ステップS116において、処理が終了していない(すなわち、No)と判定された場合には、ステップS106に戻って、ステップS106〜ステップS116の処理が繰り返し実行される。
また、ターゲット距離・相対速度算出部は、第1ペアピーク周波数推定部で推定された第1ペアの2つのピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第2ペアピーク周波数推定部で推定された第2ペアの2つのピーク周波数が、ともにピーク周波数として抽出されていない場合に、第1ペアの2つのピーク周波数に基づいて、ターゲットまでの距離およびターゲットとの相対速度を算出する。
また、ターゲット距離・相対速度算出部は、第2ペアピーク周波数推定部で推定された第2ペアの2つのピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第1ペアピーク周波数推定部で推定された第1ペアの2つのピーク周波数が、ともにピーク周波数として抽出されていない場合に、第2ペアの2つのピーク周波数に基づいて、ターゲットまでの距離およびターゲットとの相対速度を算出する。
そのため、誤ペアリングの発生を防止するとともに、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合であっても、ターゲットまでの距離およびターゲットとの相対速度を得ることができる。
上記実施の形態1では、第1ペアピーク周波数推定部15で推定された第1ペアの2つのピーク周波数および第2ペアピーク周波数推定部16で推定された第2ペアの2つのピーク周波数のうち、1つのピーク周波数がピーク周波数として抽出されていない場合(図5の場合)について説明した。また、上記実施の形態2では、第1ペアの2つのピーク周波数または第2ペアの2つのピーク周波数が、ピーク周波数として抽出されていない場合(図7の場合)について説明した。
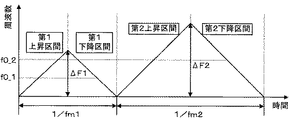
M21=C/(2・f0_1) ・・・(16)
fu1_a=RN_a/M11−VN_a/M21 ・・・(17)
M12=C/(4・fm2・ΔF2) ・・・(18)
M22=C/(2・f0_2) ・・・(19)
fd2_a=RN_a/M12+VN_a/M22 ・・・(20)
一方、ステップS116において、処理が終了していない(すなわち、No)と判定された場合には、ステップS106に戻って、ステップS106〜ステップS116の処理が繰り返し実行される。
また、ターゲット距離・相対速度算出部は、第1ペアピーク周波数推定部で推定された第1ペアの一方のピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第1ペアの他方のピーク周波数がピーク周波数として抽出されておらず、第2ペアピーク周波数推定部で推定された第2ペアの一方のピーク周波数が、ピーク周波数抽出部でピーク周波数として抽出され、第2ペアの他方のピーク周波数がピーク周波数として抽出されていない場合に、第1ペアの抽出されたピーク周波数と第2ペアの抽出されたピーク周波数とに基づいて、ターゲットまでの距離およびターゲットとの相対速度を算出する。
そのため、誤ペアリングの発生を防止するとともに、ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合であっても、ターゲットまでの距離およびターゲットとの相対速度を得ることができる。
Claims (7)
- 4つの変調区間を有する送信信号を送信波として放射する送信部と、
前記送信波がターゲットで反射した反射波を受信信号として受信する受信部と、
前記送信信号と前記受信信号とをミキシングしてビート信号を生成するミキシング部と、
前記ビート信号に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット検出部と、を備え、
前記ターゲット検出部は、
周波数解析された前記ビート信号から、前記変調区間の各々におけるピーク周波数を抽出するピーク周波数抽出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、前記4つの変調区間のうち2つの変調区間のピーク周波数をペアリングして第1ペアを生成し、前記第1ペアの距離および相対速度をそれぞれ算出する第1ペア距離・相対速度算出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、上記2つの変調区間とは異なる2つの変調区間のピーク周波数をペアリングして第2ペアを生成し、前記第2ペアの距離および相対速度をそれぞれ算出する第2ペア距離・相対速度算出部と、
前記第1ペアの距離および相対速度と前記第2ペアの距離および相対速度とがそれぞれ等しい場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を確定するターゲット確定部と、
前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を推定するターゲット推定部と、を有し、
前記ターゲット推定部は、
前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、線形予測法を用いて、今回の距離および相対速度をそれぞれ推定する今回ターゲット距離・相対速度推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第1ペアの2つのピーク周波数を推定する第1ペアピーク周波数推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第2ペアの2つのピーク周波数を推定する第2ペアピーク周波数推定部と、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第1ペアピーク調査部と、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第2ペアピーク調査部と、
前記第1ペアピーク調査部および前記第2ペアピーク調査部の調査結果により、前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット距離・相対速度算出部と、を含み、
前記ターゲット距離・相対速度算出部は、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの一方のピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、前記第2ペアの他方のピーク周波数がピーク周波数として抽出されていない場合に、
前記第1ペアの2つのピーク周波数に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出する
ことを特徴とするレーダ装置。 - 4つの変調区間を有する送信信号を送信波として放射する送信部と、
前記送信波がターゲットで反射した反射波を受信信号として受信する受信部と、
前記送信信号と前記受信信号とをミキシングしてビート信号を生成するミキシング部と、
前記ビート信号に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット検出部と、を備え、
前記ターゲット検出部は、
周波数解析された前記ビート信号から、前記変調区間の各々におけるピーク周波数を抽出するピーク周波数抽出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、前記4つの変調区間のうち2つの変調区間のピーク周波数をペアリングして第1ペアを生成し、前記第1ペアの距離および相対速度をそれぞれ算出する第1ペア距離・相対速度算出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、上記2つの変調区間とは異なる2つの変調区間のピーク周波数をペアリングして第2ペアを生成し、前記第2ペアの距離および相対速度をそれぞれ算出する第2ペア距離・相対速度算出部と、
前記第1ペアの距離および相対速度と前記第2ペアの距離および相対速度とがそれぞれ等しい場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を確定するターゲット確定部と、
前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を推定するターゲット推定部と、を有し、
前記ターゲット推定部は、
前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、線形予測法を用いて、今回の距離および相対速度をそれぞれ推定する今回ターゲット距離・相対速度推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第1ペアの2つのピーク周波数を推定する第1ペアピーク周波数推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第2ペアの2つのピーク周波数を推定する第2ペアピーク周波数推定部と、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第1ペアピーク調査部と、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第2ペアピーク調査部と、
前記第1ペアピーク調査部および前記第2ペアピーク調査部の調査結果により、前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット距離・相対速度算出部と、を含み、
前記ターゲット距離・相対速度算出部は、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの一方のピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、前記第1ペアの他方のピーク周波数がピーク周波数として抽出されていない場合に、
前記第2ペアの2つのピーク周波数に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出する
ことを特徴とするレーダ装置。 - 4つの変調区間を有する送信信号を送信波として放射する送信部と、
前記送信波がターゲットで反射した反射波を受信信号として受信する受信部と、
前記送信信号と前記受信信号とをミキシングしてビート信号を生成するミキシング部と、
前記ビート信号に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット検出部と、を備え、
前記ターゲット検出部は、
周波数解析された前記ビート信号から、前記変調区間の各々におけるピーク周波数を抽出するピーク周波数抽出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、前記4つの変調区間のうち2つの変調区間のピーク周波数をペアリングして第1ペアを生成し、前記第1ペアの距離および相対速度をそれぞれ算出する第1ペア距離・相対速度算出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、上記2つの変調区間とは異なる2つの変調区間のピーク周波数をペアリングして第2ペアを生成し、前記第2ペアの距離および相対速度をそれぞれ算出する第2ペア距離・相対速度算出部と、
前記第1ペアの距離および相対速度と前記第2ペアの距離および相対速度とがそれぞれ等しい場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を確定するターゲット確定部と、
前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を推定するターゲット推定部と、を有し、
前記ターゲット推定部は、
前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、線形予測法を用いて、今回の距離および相対速度をそれぞれ推定する今回ターゲット距離・相対速度推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第1ペアの2つのピーク周波数を推定する第1ペアピーク周波数推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第2ペアの2つのピーク周波数を推定する第2ペアピーク周波数推定部と、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第1ペアピーク調査部と、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第2ペアピーク調査部と、
前記第1ペアピーク調査部および前記第2ペアピーク調査部の調査結果により、前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット距離・相対速度算出部と、を含み、
前記ターゲット距離・相対速度算出部は、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、ともにピーク周波数として抽出されていない場合に、
前記第1ペアの2つのピーク周波数に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出する
ことを特徴とするレーダ装置。 - 4つの変調区間を有する送信信号を送信波として放射する送信部と、
前記送信波がターゲットで反射した反射波を受信信号として受信する受信部と、
前記送信信号と前記受信信号とをミキシングしてビート信号を生成するミキシング部と、
前記ビート信号に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット検出部と、を備え、
前記ターゲット検出部は、
周波数解析された前記ビート信号から、前記変調区間の各々におけるピーク周波数を抽出するピーク周波数抽出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、前記4つの変調区間のうち2つの変調区間のピーク周波数をペアリングして第1ペアを生成し、前記第1ペアの距離および相対速度をそれぞれ算出する第1ペア距離・相対速度算出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、上記2つの変調区間とは異なる2つの変調区間のピーク周波数をペアリングして第2ペアを生成し、前記第2ペアの距離および相対速度をそれぞれ算出する第2ペア距離・相対速度算出部と、
前記第1ペアの距離および相対速度と前記第2ペアの距離および相対速度とがそれぞれ等しい場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を確定するターゲット確定部と、
前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を推定するターゲット推定部と、を有し、
前記ターゲット推定部は、
前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、線形予測法を用いて、今回の距離および相対速度をそれぞれ推定する今回ターゲット距離・相対速度推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第1ペアの2つのピーク周波数を推定する第1ペアピーク周波数推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第2ペアの2つのピーク周波数を推定する第2ペアピーク周波数推定部と、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第1ペアピーク調査部と、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第2ペアピーク調査部と、
前記第1ペアピーク調査部および前記第2ペアピーク調査部の調査結果により、前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット距離・相対速度算出部と、を含み、
前記ターゲット距離・相対速度算出部は、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、ともにピーク周波数として抽出されていない場合に、
前記第2ペアの2つのピーク周波数に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出する
ことを特徴とするレーダ装置。 - 4つの変調区間を有する送信信号を送信波として放射する送信部と、
前記送信波がターゲットで反射した反射波を受信信号として受信する受信部と、
前記送信信号と前記受信信号とをミキシングしてビート信号を生成するミキシング部と、
前記ビート信号に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット検出部と、を備え、
前記ターゲット検出部は、
周波数解析された前記ビート信号から、前記変調区間の各々におけるピーク周波数を抽出するピーク周波数抽出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、前記4つの変調区間のうち2つの変調区間のピーク周波数をペアリングして第1ペアを生成し、前記第1ペアの距離および相対速度をそれぞれ算出する第1ペア距離・相対速度算出部と、
前記ピーク周波数抽出部で抽出されたピーク周波数から、上記2つの変調区間とは異なる2つの変調区間のピーク周波数をペアリングして第2ペアを生成し、前記第2ペアの距離および相対速度をそれぞれ算出する第2ペア距離・相対速度算出部と、
前記第1ペアの距離および相対速度と前記第2ペアの距離および相対速度とがそれぞれ等しい場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を確定するターゲット確定部と、
前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を推定するターゲット推定部と、を有し、
前記ターゲット推定部は、
前記ターゲット確定部において前回のサイクルで確定された前記ターゲットまでの距離および前記ターゲットとの相対速度に基づいて、線形予測法を用いて、今回の距離および相対速度をそれぞれ推定する今回ターゲット距離・相対速度推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第1ペアの2つのピーク周波数を推定する第1ペアピーク周波数推定部と、
前記今回ターゲット距離・相対速度推定部で推定された前記今回の距離および相対速度に基づいて、第2ペアの2つのピーク周波数を推定する第2ペアピーク周波数推定部と、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第1ペアピーク調査部と、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの2つのピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出されているか否かを調査する第2ペアピーク調査部と、
前記第1ペアピーク調査部および前記第2ペアピーク調査部の調査結果により、前記ビート信号のピーク周波数のうち、少なくとも1つのピーク周波数を抽出することができず、ピーク周波数のペアを生成することができない場合に、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出するターゲット距離・相対速度算出部と、を含み、
前記ターゲット距離・相対速度算出部は、
前記第1ペアピーク周波数推定部で推定された前記第1ペアの一方のピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、前記第1ペアの他方のピーク周波数がピーク周波数として抽出されておらず、
前記第2ペアピーク周波数推定部で推定された前記第2ペアの一方のピーク周波数が、前記ピーク周波数抽出部でピーク周波数として抽出され、前記第2ペアの他方のピーク周波数がピーク周波数として抽出されていない場合に、
前記第1ペアの抽出されたピーク周波数と前記第2ペアの抽出されたピーク周波数とに基づいて、前記ターゲットまでの距離および前記ターゲットとの相対速度を算出する
ことを特徴とするレーダ装置。 - 前記第1ペアピーク調査部および前記第2ペアピーク調査部は、前記第1ペアピーク周波数推定部または前記第2ペアピーク周波数推定部で推定されたピーク周波数と、前記ピーク周波数抽出部で抽出されたピーク周波数との差が所定範囲内である場合に、ピーク周波数として抽出されていると判定することを特徴とする請求項1から請求項5までの何れか1項に記載のレーダ装置。
- 前記所定範囲は、0近傍であることを特徴とする請求項6に記載のレーダ装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010230678A JP5693906B2 (ja) | 2010-10-13 | 2010-10-13 | レーダ装置 |
| US13/077,384 US8760341B2 (en) | 2010-10-13 | 2011-03-31 | Radar device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010230678A JP5693906B2 (ja) | 2010-10-13 | 2010-10-13 | レーダ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012083265A JP2012083265A (ja) | 2012-04-26 |
| JP5693906B2 true JP5693906B2 (ja) | 2015-04-01 |
Family
ID=45933685
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010230678A Active JP5693906B2 (ja) | 2010-10-13 | 2010-10-13 | レーダ装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8760341B2 (ja) |
| JP (1) | JP5693906B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010204003A (ja) * | 2009-03-05 | 2010-09-16 | Hitachi Kokusai Electric Inc | 複合機能レーダ装置 |
| JP2014115137A (ja) * | 2012-12-07 | 2014-06-26 | Fujitsu Ten Ltd | レーダ装置、及び、信号処理方法 |
| DE102013212664A1 (de) * | 2013-06-28 | 2014-12-31 | Robert Bosch Gmbh | Radarsensor und Verfahren zum Betrieb eines Radarsensors |
| JP6857971B2 (ja) * | 2016-06-13 | 2021-04-14 | 株式会社デンソーテン | レーダ装置および信号処理方法 |
| DE102018222629A1 (de) * | 2018-01-17 | 2019-07-18 | Carl Zeiss Industrielle Messtechnik Gmbh | Verfahren und Vorrichtung zur Bestimmung von mindestens einer räumlichen Position und Orientierung mindestens eines Objekts |
| US11143753B2 (en) * | 2019-05-09 | 2021-10-12 | GM Global Technology Operations LLC | Range extension with segmentation |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69611278T2 (de) * | 1995-11-10 | 2001-05-23 | Toyota Motor Co Ltd | Radargerät zur Erfassung der Richtung des Zentrums eines Ziels |
| JP3206437B2 (ja) * | 1996-07-04 | 2001-09-10 | 日本電気株式会社 | Fm−cwレーダ装置及び対象物測距方法 |
| JP2935420B2 (ja) * | 1996-11-19 | 1999-08-16 | 本田技研工業株式会社 | Fmレーダ装置 |
| JP3305624B2 (ja) * | 1997-07-16 | 2002-07-24 | 本田技研工業株式会社 | 物体検知装置 |
| US6573859B2 (en) * | 2000-02-07 | 2003-06-03 | Toyota Jidosha Kabushiki Kaisha | Radar apparatus |
| JP2002236170A (ja) | 2001-02-06 | 2002-08-23 | Fujitsu Ten Ltd | Fm−cwレーダ処理装置 |
| JP3988571B2 (ja) * | 2001-09-17 | 2007-10-10 | 株式会社デンソー | レーダ装置 |
| JP3753652B2 (ja) * | 2001-12-04 | 2006-03-08 | 富士通テン株式会社 | Fm−cwレーダのミスペアリング判定及び信号処理方法 |
| US6661370B2 (en) * | 2001-12-11 | 2003-12-09 | Fujitsu Ten Limited | Radar data processing apparatus and data processing method |
| JP3729127B2 (ja) * | 2001-12-13 | 2005-12-21 | 株式会社村田製作所 | レーダ |
| US6492938B1 (en) * | 2002-02-11 | 2002-12-10 | Delphi Technologies, Inc. | Method of associating target data in a multi-slope FMCW radar system |
| JP3801068B2 (ja) * | 2002-02-19 | 2006-07-26 | 株式会社デンソー | Fmcwレーダ装置,プログラム |
| US6606052B1 (en) * | 2002-03-07 | 2003-08-12 | Visteon Global Technologies, Inc. | Method and apparatus for detecting multiple objects with frequency modulated continuous wave radar |
| DE10231597A1 (de) * | 2002-07-12 | 2004-01-29 | Robert Bosch Gmbh | Verfahren und Radarsystem zur Bestimmung der Richtungswinkel von Radarobjekten |
| JP4223767B2 (ja) * | 2002-08-30 | 2009-02-12 | 富士通株式会社 | クロスオーバ検出方法、レーダ装置及びクロスオーバ検出プログラム |
| DE10243811A1 (de) * | 2002-09-20 | 2004-04-01 | Robert Bosch Gmbh | Verfahren zur Abstands- und Geschwindigkeitsmessung an mehreren Objekten mittels FMCW-Radar |
| JP4278507B2 (ja) * | 2003-12-26 | 2009-06-17 | 富士通テン株式会社 | Fm−cwレーダ装置 |
| DK1735637T3 (en) * | 2004-04-05 | 2019-04-29 | Weibel Scient A/S | System and method for radar detection of an object. |
| WO2006134912A1 (ja) * | 2005-06-17 | 2006-12-21 | Murata Manufacturing Co., Ltd. | レーダ装置 |
| DE102006028465A1 (de) * | 2006-06-21 | 2007-12-27 | Valeo Schalter Und Sensoren Gmbh | Kraftfahrzeug-Radarsystem und Verfahren zur Bestimmung von Geschwindigkeiten und Entfernungen von Objekten relativ zu dem einen Radarsystem |
| JP4871104B2 (ja) * | 2006-11-24 | 2012-02-08 | 日立オートモティブシステムズ株式会社 | レーダ装置及び信号処理方法 |
| JP2010038705A (ja) * | 2008-08-05 | 2010-02-18 | Fujitsu Ten Ltd | 信号処理装置、レーダ装置、車両制御装置、及び信号処理方法 |
| DE102009002243A1 (de) * | 2009-04-07 | 2010-10-14 | Robert Bosch Gmbh | FMCW-Radarsensor und Verfahren zum Frequenzmatching |
| JP4905512B2 (ja) * | 2009-07-09 | 2012-03-28 | 株式会社デンソー | 物標情報推定装置 |
-
2010
- 2010-10-13 JP JP2010230678A patent/JP5693906B2/ja active Active
-
2011
- 2011-03-31 US US13/077,384 patent/US8760341B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012083265A (ja) | 2012-04-26 |
| US20120092209A1 (en) | 2012-04-19 |
| US8760341B2 (en) | 2014-06-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11199617B2 (en) | Radar sensor for motor vehicles | |
| CN107027323B (zh) | 雷达测量方法 | |
| JP4492628B2 (ja) | 干渉判定方法,fmcwレーダ | |
| JP4462060B2 (ja) | Fmcwレーダ装置 | |
| CN107076835B (zh) | 具有不同视距的雷达测量方法 | |
| US9400324B2 (en) | Radar device | |
| JP5693906B2 (ja) | レーダ装置 | |
| US10436890B2 (en) | Method for finding the position of objects using an FMCW radar | |
| JP4356758B2 (ja) | Fmcwレーダ | |
| JP4232570B2 (ja) | 車両用レーダ装置 | |
| EP1881343B1 (en) | Radar | |
| JP6270901B2 (ja) | Fmcwレーダ装置 | |
| US11275172B2 (en) | Target detection device | |
| JP5978962B2 (ja) | Fmcwレーダ装置 | |
| US20030156055A1 (en) | FMCW radar system | |
| JP2008232832A (ja) | 干渉判定方法,fmcwレーダ | |
| JP6231803B2 (ja) | レーダ装置、及び、信号処理方法 | |
| JP2016151424A (ja) | レーダ装置 | |
| EP2834665A1 (en) | Phase monopulse radar system and target detecting method | |
| JP2009014405A (ja) | 車載用レーダ装置 | |
| US20070153255A1 (en) | Radar | |
| US20230350012A1 (en) | Radar device | |
| JP6843568B2 (ja) | レーダ装置および到来方向推定方法 | |
| JP2012168119A (ja) | レーダ装置 | |
| JP5116746B2 (ja) | レーダ装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121003 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121218 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130215 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131126 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5693906 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |