JP3661572B2 - インバーターの電流センサー診断装置 - Google Patents
インバーターの電流センサー診断装置 Download PDFInfo
- Publication number
- JP3661572B2 JP3661572B2 JP2000217359A JP2000217359A JP3661572B2 JP 3661572 B2 JP3661572 B2 JP 3661572B2 JP 2000217359 A JP2000217359 A JP 2000217359A JP 2000217359 A JP2000217359 A JP 2000217359A JP 3661572 B2 JP3661572 B2 JP 3661572B2
- Authority
- JP
- Japan
- Prior art keywords
- phase
- current
- value
- motor
- current sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
Description
【発明の属する技術分野】
本発明は、インバーターに用いる電流センサーの異常を診断する装置に関する。
【0002】
【従来の技術】
3個の電流センサーを用いて3相電流IU、IV、IWを検出し、3相交流モーターをベクトル制御するインバーターの電流センサーの異常を診断する装置が知られている(例えば特開平06−253585号公報参照)。この種の診断装置では、3相交流モーターにおける同一時点の3相交流電流の総和(IU+IV+IW)が理論的に0になることを利用し、3個の電流センサーにより同一時点に検出した3相交流電流の総和(IU+IV+IW)が判定基準値を超えた場合は電流センサーが異常であると診断している。
【0003】
【発明が解決しようとする課題】
ところで、3相交流モーターにおける同一時点の3相交流電流の総和(IU+IV+IW)は理論的に0になることから、3相の内のいずれか2相の電流を検出し、検出した2相の電流に基づいて他の1相の電流を演算により求めることができる。したがって、2個の電流センサーを用いれば3相交流モーターをベクトル制御することができる。
【0004】
しかしながら、2個の電流センサーを用いて3相交流モーターのベクトル制御を行う場合には、同一時点の3相交流電流の総和(IU+IV+IW)が0になるという原理を利用して、電流センサーの異常を診断することができなくなる。
【0005】
本発明の目的は、2個の電流センサーを用いて3相交流モーターのベクトル制御を行うインバーターの電流センサーの異常を診断することにある。
【0006】
【課題を解決するための手段】
一実施の形態の構成を示す図1に対応づけて本発明を説明すると、
(1) 請求項1の発明は、3相交流モーター7へ流れる3相交流電流U,V,Wの内の第1相Uと第2相Vの電流iu、ivを検出する2個の電流センサー5,6を備え、電流センサー5,6により検出された第1相電流検出値iuと第2相電流検出値ivとに基づいて3相交流モーター7を駆動制御するインバーターに用いられ、3相交流モーター7の駆動時に、第1相Uの電流指令値Iu*と電流検出値iuとの偏差ΔIuの絶対値、または第2相Vの電流指令値Iv*と電流検出値ivとの偏差ΔIvの絶対値が第1の判定基準値を超えた場合は、電流センサー5,6が異常であると判定する電流センサー診断装置であって、インバーターへ入力されるモータートルク指令値T * の変化量が0の場合には、モータートルク指令値T * に対するモーター出力トルクが許容範囲内となる電流偏差限界値を第1の判定基準値に設定し、モータートルク指令値T * の変化量が0でない場合には、モータートルク指令値T * の変化量が0の場合に設定した第1の判定基準値をモータートルク指令値の変化量が大きくなるほど大きくする。
(2) 請求項2のインバーターの電流センサー診断装置は、3相交流モーター7の駆動時に、第1相電流検出値iuの絶対値または第2相電流検出値ivの絶対値が第2の判定基準値を超えた場合は、電流センサー5,6が異常であると判定する。
(3) 請求項3のインバーターの電流センサー診断装置は、第2の判定基準値を、インバーターの電力変換素子の許容電流に基づいて決定するようにしたものである。
(4) 請求項4のインバーターの電流センサー診断装置は、3相交流モーター7の非駆動時に、第1相電流検出値iuの絶対値または第2相電流検出値ivの絶対値が第3の判定基準値を超えた場合は、電流センサー5,6が異常であると判定する。
(5) 請求項5のインバーターの電流センサー診断装置は、第3の判定基準値を電流センサー5,6のオフセット誤差に基づいて決定するようにしたものである。
【0007】
上述した課題を解決するための手段の項では、説明を分かりやすくするために一実施の形態の図を用いたが、これにより本発明が一実施の形態に限定されるものではない。
【0008】
【発明の効果】
(1) 請求項1の発明によれば、3相交流モーターの駆動時に、第1相の電流指令値と電流検出値との偏差の絶対値、または第2相の電流指令値と電流検出値との偏差の絶対値が第1の判定基準値を超えた場合は、電流センサーが異常であると判定する電流センサー診断装置において、インバーターへ入力されるモータートルク指令値の変化量が0の場合には、モータートルク指令値に対するモーター出力トルクが許容範囲内となる電流偏差限界値を第1の判定基準値に設定し、モータートルク指令値の変化量が0でない場合には、モータートルク指令値の変化量が0の場合に設定した第1の判定基準値をモータートルク指令値の変化量が大きくなるほど大きくするようにしたので、2個の電流センサーを用いて3相交流モーターを駆動制御する場合でも、電流センサーの異常を正確に診断することができる上に、モーター制御の過渡時においても電流センサーの異常発生を正確に診断することができる。
(2) 請求項2および請求項3の発明によれば、3相交流モーターの駆動時に、第1相電流検出値の絶対値または第2相電流検出値の絶対値が第2の判定基準値を超えた場合は、電流センサーが異常であると判定するようにしたので、2個の電流センサーを用いて3相交流モーターを駆動制御する場合でも、電流センサーの異常を正確に診断することができる。
(3) 請求項4および請求項5の発明によれば、3相交流モーターの非駆動時に、第1相電流検出値の絶対値または第2相電流検出値の絶対値が第3の判定基準値を超えた場合は、電流センサーが異常であると判定するようにしたので、2個の電流センサーを用いて3相交流モーターを駆動制御する場合でも、電流センサーの異常を正確に診断することができる上に、モーター非駆動時においても電流センサーの異常を正確に診断することができる。
【0009】
【発明の実施の形態】
図1は、一実施の形態の電流センサー診断装置を備えたインバーターの制御ブロック図である。このインバーターは2個の電流センサー5,6により3相交流モーター7をベクトル制御する。電流センサー5はU相電流iuを検出し、電流センサー6はV相電流ivを検出する。これらの2相分の交流電流iu、ivから次式により、W相電流iwを演算により求める。
【数1】
iw=−iu−iv
【0010】
ベクトル制御部1は、トルク指令値T*、モーター回転速度ωおよびバッテリー電圧Vbに基づいて電流テーブルからd、q軸電流指令値id*、iq*を演算する。非干渉電流制御部2は、d、q軸の実電流id、iqをそれぞれの電流指令値id*、iq*に一致させるためのd、q軸電圧指令値vd*、vq*を演算する。2相3相変換部3は、モーター7の磁極位置θbに基づいてd、q軸電圧指令値vd*、vq*を3相交流電圧指令値vu*、vv*、vw*に変換する。インバーター主回路4は、3相交流電圧指令値vu*、vv*、vw*にしたがってバッテリー12の直流電圧をIGBT(不図示)によりスイッチングし、3相交流電圧をモーター7に印加する。
【0011】
モーター回転数・位置検出部9は、モーター7の出力軸に連結されたエンコーダー8によりモーター7の回転速度ωと磁極位置θaを検出する。位相補正部10は、3相2相変換部13と2相3相変換部3との演算処理時間の差によるモーター磁極位置θaの変化分を補正し、補正値θbを出力する。バッテリー12はインバーター主回路4へ直流電力を供給する。3相2相変換部13は、磁極位置θaに応じて電流センサー5,6により検出した3相交流電流iu、iv、iwをd、q軸電流id、iqに変換する。
【0012】
2相3相変換部14は、磁束位置θaに基づいてd、q軸電流指令値id*、iq*をU、V相交流電流指令値Iu*、Iv*に変換する。異常検出部15はマイクロコンピューターとメモリなどの周辺部品から構成され、U、V相交流電流指令値Iu*、Iv*と電流センサー5,6により検出したU、V相交流電流iu、ivとの差ΔIu、ΔIv、およびU、V相交流電流iu、ivに基づいて電流センサー5,6の異常を検出する。
【0013】
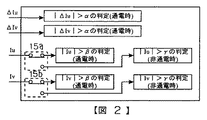
図2は、異常検出部15における電流センサー5,6の異常診断処理を示す制御ブロック図である。この実施の形態では、U相電流指令値Iu*とV相電流指令値Iv*がともに0のとき、あるいはインバーターがモーター駆動制御を行っていないときをモーター7の非駆動時とし、U相電流指令値Iu*とV相電流指令値Iv*のいずれか一方が0でないとき、あるいはインバーターがモーター駆動制御を行っているときをモーター7の駆動時とする。そして、モーター駆動時と非駆動時とで別の方法で電流センサー5,6を診断する。スイッチ15a、15bは、モーター駆動時と非駆動時とで判定基準値を切り換えるためのスイッチである。
【0014】
まずモーター駆動時には、2相3相変換部14から出力されるU、V相交流電流指令値Iu*、Iv*と、電流センサー5,6により検出したU、V相交流電流iu、ivとの制御偏差ΔIu、ΔIvを求める。
【数2】
ΔIu=Iu*−iu,
ΔIv=Iv*−iv
そして、相電流指令値と実電流との制御偏差ΔIu、ΔIvの絶対値を予め設定した判定基準値αと比較し、制御偏差ΔIu、ΔIvの絶対値が判定基準値αを超える場合は電流センサー5,6が異常であると判断する。
【数3】
|ΔIu|=|(Iu*−iu)|>α,
|ΔIv|=|(Iv*−iv)|>α
ここで、判定基準値αについてはその詳細を後述するが、インバーターおよびモーター7の運転状態と制御誤差に基づいて決定する。
【0015】
モーター駆動時にはまた、U、V相交流電流iu、ivの絶対値を予め設定した判定基準値βと比較し、電流iu、ivの絶対値が判定基準値βを超える場合は電流センサー5,6が異常であると診断する。
【数4】
|iu|>β,
|iv|>β
ここで、判定基準値βはIGBTなどのインバーター主回路4の電力変換素子の許容電流に基づいて決定する。
【0016】
一方、モーター非駆動時には、U、V相交流電流iu、ivの絶対値を判定基準値γと比較し、判定基準値γを超える場合は電流センサー5,6が異常であると診断する。
【数5】
|iu|>γ,
|iv|>γ
ここで、判定基準値γは電流センサー5,6のオフセット誤差に基づいて決定する。
【0017】
次に、上述した判定基準値αの決め方について説明する。まず、予めモーター7の運転状態、すなわちモーター回転速度ωとバッテリー電圧Vbに応じて、モータートルク指令値T*に対するモーター出力トルクTが許容範囲内となる電流偏差限界値α1を設定する。そして、前回の演算制御時のトルク指令値T*[n-1]と今回の演算制御時のトルク指令値T*[n]との差の絶対値
【数6】
|ΔT*[n]|=|(T*[n]−T*[n-1])|
が0の場合は、モーター制御が定常状態にあると判定して判定基準値αに上記α1を設定する。
【数7】
α=α1 (モーター制御が定常状態のとき)
【0018】
一方、前回のトルク指令値T*[n-1]と今回のトルク指令値T*[n]との差の絶対値(数式6)が0でない場合は、モーター制御が過渡状態にあると判定し、次のようにして判定基準値αを設定する。まず、前回のトルク指令値T*[n-1]に対するd、q軸電流指令値id*[n-1]、iq*[n-1]の波高値Ilp*[n-1]と、今回のトルク指令値T*[n]に対するd、q軸電流指令値id*[n]、iq*[n]の波高値Ilp*[n]を求める。
【数8】
Ilp*[n-1]=√(id[n-1]2+iq[n-1]2),
Ilp*[n]=√(id[n]2+iq[n]2)
さらに、前回と今回の波高値の差ΔIlp*[n]の絶対値を求める。
【数9】
|ΔIlp*[n]|=|Ilp*[n]−Ilp*[n-1]|
そして、判定基準値αを次のように設定する。
【数10】
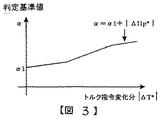
α=α1+|ΔIlp*[n]| (モーター制御が過渡状態のとき)
【0019】
図3は、トルク指令値変化ΔT*に対する電流制御偏差|ΔIu|、|ΔIv|の判定基準値αを示す。トルク指令値変化分|ΔT*|の増加にともなってd、q軸電流指令値の波高値の変化分|ΔIlp*|も増加するので、モーター制御過渡時における電流制御偏差の判定基準値αが大きくなり、モーター制御の過渡時でも電流センサー5,6を正確に診断することができ、誤診断を防止できる。
【0020】
図4は、電流センサー5,6の異常診断プログラムを示すフローチャートである。このフローチャートにより、一実施の形態の動作を説明する。異常検出部15のマイクロコンピューターは、所定の時間ごとにこの電流センサー異常診断プログラムを実行する。
【0021】
ステップ1において、モーター7の駆動時か否かを確認し、モーター駆動時はステップ2へ進み、非駆動時はステップ6へ進む。モーター駆動時には、ステップ2で電流センサー5,6により検出したU、V相交流電流|iu|、|iv|をそれぞれ予め設定した判定基準値βと比較し、相電流|iu|または|iv|が判定基準値βを超える場合はステップ5へ進み、電流センサー5,6が異常であると判定して異常診断結果を出力する。
【0022】
U、V相交流電流|iu|、|iv|がともに判定基準値β以下の場合はステップ3へ進み、上述したように、前回の演算制御時と今回の演算制御時のトルク指令値の差|ΔT*[n]|(数式6)、および前回と今回のd、q軸電流指令値の波高値の差|ΔIlp*[n]|(数式9)を演算し、それらに基づいて上述したように判定基準値αを設定する。
【0023】
続くステップ4では、U、V相電流の指令値と実際値との制御偏差|ΔIu|、|ΔIv|をそれぞれ判定基準値αと比較し、制御偏差|ΔIu|または|ΔIv|が判定基準値αを超える場合はステップ5へ進み、電流センサー5,6が異常であると判定して異常診断結果を出力する。制御偏差|ΔIu|、|ΔIv|がともに判定基準値α以下の場合はステップ7へ進み、電流センサー5,6は異常なしと判定して異常なしの診断結果を出力する。
【0024】
一方、モーター非駆動時は、ステップ6でU、V相交流電流|iu|、|iv|をそれぞれ予め設定した判定基準値γと比較し、相電流|iu|または|iv|が判定基準値γを超える場合はステップ5へ進み、電流センサー5,6が異常であると判定して異常診断結果を出力する。一方、U、V相交流電流|iu|、|iv|がともに判定基準値γ以下の場合はステップ7へ進み、電流センサー5,6は異常なしと判定して異常なしの診断結果を出力する。
【0025】
このように、モーター駆動時には、電流指令値Iu*、Iv*と電流センサー5,6で検出した実電流iu、ivとの制御偏差|ΔIu|、|ΔIv|が判定基準値αを超えた場合、あるいは電流センサー5,6で検出した実電流|iu|、|iv|が判定基準値βを超えた場合は、電流センサー5,6に異常が発生したと判定する。またモーター非駆動時には、電流センサー5,6で検出した実電流|iu|、|iv|が判定基準値γを超えた場合は、電流センサー5,6に異常が発生したと判定する。これにより、2個の電流センサー5,6を用いて3相交流モーターのベクトル制御を行う場合でも、電流センサー5,6の異常を正確に診断することができる。
【0026】
また、インバーターへ入力されるモータートルク指令値が変化する場合は、d、q軸電流指令値の波高値の変化量、すなわち電流指令値の変化量に応じて判定基準値αを大きくするようにしたので、モーター制御の過渡時においても電流センサー5,6の異常発生を正確に診断することができる。
【0027】
なお、上述した一実施の形態ではベクトル制御インバーターを例に上げて説明したが、本発明はベクトル制御インバーター以外のインバーターに適用することができ、上述した一実施の形態の効果と同様な効果を達成することができる。
【図面の簡単な説明】
【図1】 一実施の形態の構成を示す制御ブロック図である。
【図2】 異常検出部の詳細を示す制御ブロック図である。
【図3】 トルク指令値変化分ΔT*に対する電流制御偏差の判定基準値αを示す図である。
【図4】 一実施の形態の電流センサー異常診断プログラムを示すフローチャートである。
【符号の説明】
1 ベクトル制御部
2 非干渉電流制御部
3 2相3相変換部
4 インバーター主回路
5,6 電流センサー
7 3相交流モーター
8 エンコーダー
9 モーター回転数・位置検出部
10 位相補正部
13 3相2相変換部
14 2相3相変換部
15 異常検出部
15a,15b スイッチ
Claims (5)
- 3相交流モーターへ流れる3相交流電流の内の第1相と第2相の電流を検出する2個の電流センサーを備え、前記電流センサーにより検出された第1相電流検出値と第2相電流検出値とに基づいて前記3相交流モーターを駆動制御するインバーターに用いられ、前記3相交流モーターの駆動時に、第1相の電流指令値と電流検出値との偏差の絶対値、または第2相の電流指令値と電流検出値との偏差の絶対値が第1の判定基準値を超えた場合は、前記電流センサーが異常であると判定する電流センサー診断装置であって、
インバーターへ入力されるモータートルク指令値の変化量が0の場合には、モータートルク指令値に対するモーター出力トルクが許容範囲内となる電流偏差限界値を前記第1の判定基準値に設定し、モータートルク指令値の変化量が0でない場合には、モータートルク指令値の変化量が0の場合に設定した前記第1の判定基準値をモータートルク指令値の変化量が大きくなるほど大きくすることを特徴とするインバーターの電流センサー診断装置。 - 請求項1に記載のインバーターの電流センサー診断装置において、
前記3相交流モーターの駆動時に、第1相電流検出値の絶対値または第2相電流検出値の絶対値が第2の判定基準値を超えた場合は、前記電流センサーが異常であると判定することを特徴とするインバーターの電流センサー診断装置。 - 請求項2に記載のインバーターの電流センサー診断装置において、
前記第2の判定基準値を、前記インバーターの電力変換素子の許容電流に基づいて決定することを特徴とするインバーターの電流センサー診断装置。 - 請求項1〜3のいずれかの項に記載のインバーターの電流センサー診断装置において、
前記3相交流モーターの非駆動時に、第1相電流検出値の絶対値または第2相電流検出値の絶対値が第3の判定基準値を超えた場合は、前記電流センサーが異常であると判定することを特徴とするインバーターの電流センサー診断装置。 - 請求項4に記載のインバーターの電流センサー診断装置において、
前記第3の判定基準値を前記電流センサーのオフセット誤差に基づいて決定することを特徴とするインバーターの電流センサー診断装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000217359A JP3661572B2 (ja) | 2000-07-18 | 2000-07-18 | インバーターの電流センサー診断装置 |
| US09/906,647 US6593714B2 (en) | 2000-07-18 | 2001-07-18 | Motor control apparatus with a current sensor diagnostic apparatus and a current sensor diagnostic method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2000217359A JP3661572B2 (ja) | 2000-07-18 | 2000-07-18 | インバーターの電流センサー診断装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2002034266A JP2002034266A (ja) | 2002-01-31 |
| JP3661572B2 true JP3661572B2 (ja) | 2005-06-15 |
Family
ID=18712480
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000217359A Expired - Fee Related JP3661572B2 (ja) | 2000-07-18 | 2000-07-18 | インバーターの電流センサー診断装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US6593714B2 (ja) |
| JP (1) | JP3661572B2 (ja) |
Families Citing this family (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003079200A (ja) * | 2001-09-04 | 2003-03-14 | Hitachi Ltd | 電動機駆動システム |
| US6720749B2 (en) * | 2001-10-04 | 2004-04-13 | Texas Instruments Incorporated | Three-phase motor protector apparatus |
| JP3690338B2 (ja) * | 2001-11-16 | 2005-08-31 | 松下電器産業株式会社 | モータ制御装置 |
| JP2004343833A (ja) * | 2003-05-13 | 2004-12-02 | Toshiba Corp | モータ制御装置 |
| EP1480330A3 (en) * | 2003-05-22 | 2007-09-26 | Jtekt Corporation | Apparatus and method for controlling a motor |
| JP3795477B2 (ja) * | 2003-06-30 | 2006-07-12 | 本田技研工業株式会社 | モータ駆動装置 |
| KR100666504B1 (ko) | 2004-07-16 | 2007-01-09 | 엘에스산전 주식회사 | 벡터형 인버터 시스템의 전류센서 고장식별 및 오차보상을위한 장치 및 방법 |
| JP4289458B2 (ja) * | 2004-09-07 | 2009-07-01 | 三菱電機株式会社 | 電動パワーステアリング制御装置 |
| JP4701767B2 (ja) * | 2005-03-18 | 2011-06-15 | トヨタ自動車株式会社 | 電源装置 |
| US7667426B2 (en) * | 2005-06-17 | 2010-02-23 | Gm Global Technology Operations, Inc. | On-line minimum copper loss control of interior permanent-magnet synchronous machine for automotive applications |
| US7932693B2 (en) * | 2005-07-07 | 2011-04-26 | Eaton Corporation | System and method of controlling power to a non-motor load |
| JP4926492B2 (ja) * | 2006-02-20 | 2012-05-09 | 本田技研工業株式会社 | モータ制御装置 |
| KR101040890B1 (ko) * | 2006-04-20 | 2011-06-16 | 미쓰비시덴키 가부시키가이샤 | 전동기 제어 장치 |
| JP5177133B2 (ja) * | 2007-03-28 | 2013-04-03 | 株式会社安川電機 | モータ制御装置 |
| JP2009131043A (ja) * | 2007-11-22 | 2009-06-11 | Hitachi Ltd | モータ制御装置 |
| US8004226B2 (en) * | 2008-08-06 | 2011-08-23 | Caterpillar Inc. | Method and system for detecting a failed current sensor in a three-phase machine |
| JP5375059B2 (ja) * | 2008-12-09 | 2013-12-25 | 日産自動車株式会社 | センサ異常検出装置及びセンサの異常検出方法 |
| DE102009034595B4 (de) * | 2009-07-24 | 2014-09-04 | Conti Temic Microelectronic Gmbh | Verfahren zur Diagnose von Stromsensoren einer Drehfeldmaschine während deren Betriebs |
| JP5696401B2 (ja) * | 2009-09-17 | 2015-04-08 | 株式会社アドヴィックス | モータ制御装置 |
| CN102315817B (zh) * | 2010-06-30 | 2013-10-30 | 比亚迪股份有限公司 | 用于检测电流传感器故障的电机控制系统及控制方法 |
| JP5481286B2 (ja) * | 2010-06-30 | 2014-04-23 | 日立オートモティブシステムズ株式会社 | 電力変換システムおよび電力変換装置 |
| JP5409678B2 (ja) * | 2011-03-17 | 2014-02-05 | 三菱電機株式会社 | 電動機制御装置 |
| US8867181B2 (en) * | 2011-09-23 | 2014-10-21 | GM Global Technology Operations LLC | Protection of motor drive systems from current sensor faults |
| US9291678B2 (en) * | 2012-05-31 | 2016-03-22 | Deere & Company | Method and controller for an electric motor with switch testing |
| FR2993116B1 (fr) | 2012-07-03 | 2014-06-27 | Renault Sa | Procede de commande d'un groupe motopropulseur et systeme correspondant |
| JP5945741B2 (ja) * | 2012-09-24 | 2016-07-05 | 日立オートモティブシステムズ株式会社 | 電動パワーステアリング装置 |
| JP5661839B2 (ja) * | 2013-03-14 | 2015-01-28 | ファナック株式会社 | 異常検出診断機能を備える同期電動機の制御システム |
| FR3005380B1 (fr) * | 2013-05-03 | 2015-04-17 | Renault Sa | Procede de verification du fonctionnement d'un groupe motopropulseur equipant un vehicule automobile et systeme correspondant |
| CN103501154B (zh) * | 2013-10-21 | 2016-04-06 | 佛山市美传科技有限公司 | 三相交流异步电动机的低速控制装置 |
| CN103501153B (zh) * | 2013-10-21 | 2016-01-20 | 佛山市美传科技有限公司 | 三相交流异步电动机的智能调速系统 |
| CN104793161B (zh) * | 2014-01-17 | 2017-11-03 | 联合汽车电子有限公司 | 电机驱动系统电流传感器故障诊断方法 |
| CN104793162B (zh) * | 2014-01-17 | 2017-11-03 | 联合汽车电子有限公司 | 电机驱动系统电流传感器故障诊断方法 |
| CN105229884B (zh) | 2014-04-02 | 2018-02-23 | 三菱电机株式会社 | 电动机控制装置以及电动机控制系统 |
| JP6233178B2 (ja) * | 2014-05-09 | 2017-11-22 | トヨタ自動車株式会社 | 昇圧コンバータ装置 |
| KR102250100B1 (ko) * | 2014-09-15 | 2021-05-11 | 현대모비스 주식회사 | 전류센서의 고장을 감지하는 방법 및 그 장치 |
| CN104682808B (zh) * | 2015-03-17 | 2017-04-26 | 南京信息职业技术学院 | 基于简化磁链法的开关磁阻电机调速系统容错运行方法 |
| CN104849689B (zh) * | 2015-05-20 | 2017-11-28 | 国网河南省电力公司电力科学研究院 | 一种级联多电平变流器直压传感器失灵预警方法 |
| CN107340486B (zh) * | 2016-04-28 | 2020-01-07 | 中车株洲电力机车研究所有限公司 | 机车牵引变流器的输出电流传感器的状态检测方法 |
| DE112017005650B4 (de) * | 2016-12-15 | 2023-09-07 | Mitsubishi Electric Corporation | Kraftübertragungsmechanismus-anomalie-diagnoseeinrichtung und kraftübertragungsmechanismus-anomalie-diagnoseverfahren |
| US10340827B2 (en) * | 2017-11-06 | 2019-07-02 | Steering Solutions Ip Holding Corporation | Fault tolerant current measurement in motor control systems |
| JP6984390B2 (ja) * | 2017-12-20 | 2021-12-17 | 株式会社デンソー | 電力制御ユニット |
| DE102018118180A1 (de) * | 2018-07-27 | 2020-01-30 | Ebm-Papst Mulfingen Gmbh & Co. Kg | Schaltungsanordnung und Verfahren zum Überlastschutz eines EC-Motors |
| KR102150872B1 (ko) * | 2018-09-03 | 2020-09-03 | 주식회사 만도 | 모터 전류 센서의 고장 감지 장치 및 방법 |
| WO2022224335A1 (ja) * | 2021-04-20 | 2022-10-27 | 三菱電機株式会社 | モータ制御装置および電動パワーステアリング装置 |
| JP2024041584A (ja) * | 2022-09-14 | 2024-03-27 | 日立Astemo株式会社 | 電力変換装置および駆動装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62256007A (ja) * | 1986-04-30 | 1987-11-07 | Mitsubishi Electric Corp | 故障診断装置 |
| US4794309A (en) * | 1987-08-26 | 1988-12-27 | Bailey Japan Co., Ltd. | Electric actuator for a control valve |
| JP2780263B2 (ja) * | 1988-02-23 | 1998-07-30 | 株式会社明電舎 | 誘導電動機のベクトル制御方法と装置 |
| JPH06253585A (ja) | 1993-02-25 | 1994-09-09 | Nippondenso Co Ltd | ブラシレスモータの異常検出装置 |
| JP3297159B2 (ja) * | 1993-09-14 | 2002-07-02 | 東芝キヤリア株式会社 | 直流ブラシレスモータの駆動装置およびその良否識別方法 |
| US5563489A (en) * | 1994-03-31 | 1996-10-08 | American Standard Inc. | Starter contact integrity test |
| JPH0923501A (ja) * | 1995-07-03 | 1997-01-21 | Hitachi Ltd | 電気車制御装置 |
| JP3508387B2 (ja) * | 1996-04-19 | 2004-03-22 | スズキ株式会社 | 電動アシスト自転車の制御装置 |
| US6147470A (en) * | 1996-09-13 | 2000-11-14 | Hitachi, Ltd. | Device for controlling induction motor and method of controlling the same |
| JP3346223B2 (ja) * | 1997-06-10 | 2002-11-18 | 株式会社日立製作所 | モータ制御方法及びモータ制御システム |
| JP3282657B2 (ja) * | 1997-06-18 | 2002-05-20 | 株式会社安川電機 | 永久磁石形ブラシレスモータの初期磁極位置推定方法 |
| US6281656B1 (en) * | 1998-09-30 | 2001-08-28 | Hitachi, Ltd. | Synchronous motor control device electric motor vehicle control device and method of controlling synchronous motor |
| JP2001119987A (ja) * | 1999-10-18 | 2001-04-27 | Meidensha Corp | モータ駆動回路の故障診断装置 |
| US6433504B1 (en) * | 1999-12-13 | 2002-08-13 | A. O. Smith Corporation | Method and apparatus of improving the efficiency of an induction motor |
| JP3515460B2 (ja) * | 1999-12-24 | 2004-04-05 | 本田技研工業株式会社 | 交流モータの制御装置 |
-
2000
- 2000-07-18 JP JP2000217359A patent/JP3661572B2/ja not_active Expired - Fee Related
-
2001
- 2001-07-18 US US09/906,647 patent/US6593714B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US6593714B2 (en) | 2003-07-15 |
| US20020008492A1 (en) | 2002-01-24 |
| JP2002034266A (ja) | 2002-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3661572B2 (ja) | インバーターの電流センサー診断装置 | |
| CN101160713B (zh) | 交流电动机控制装置 | |
| US6501243B1 (en) | Synchronous motor-control apparatus and vehicle using the control apparatus | |
| JP3812739B2 (ja) | モータ異常検出装置及び電動パワーステアリング制御装置 | |
| JP4168730B2 (ja) | 3相交流電動機の制御装置 | |
| JP5402403B2 (ja) | 電動機制御システム | |
| JP3559260B2 (ja) | 電動パワーステアリング制御装置及び制御方法 | |
| JP3801906B2 (ja) | 電気車の制御装置及び制御方法 | |
| WO2009123107A1 (ja) | モータ制御装置および電動パワーステアリング装置 | |
| JP5584994B2 (ja) | インバータの故障診断装置 | |
| KR101393828B1 (ko) | 브러시레스 모터의 구동 장치 | |
| JP4793058B2 (ja) | 電圧センサの故障診断装置 | |
| JP4561105B2 (ja) | モータ制御装置 | |
| JP5482050B2 (ja) | モータ制御装置およびモータの欠相診断方法 | |
| US20110062904A1 (en) | Alternating current motor control system | |
| JP2003255006A (ja) | 交流モータの電流センサ故障検知装置 | |
| JP3572384B2 (ja) | 3相交流モータの制御装置 | |
| JP2012029347A (ja) | 欠相診断装置及び欠相診断方法 | |
| JP2019208329A (ja) | センサレスベクトル制御装置及びセンサレスベクトル制御方法 | |
| JP7006428B2 (ja) | モータ制御装置 | |
| US11611292B2 (en) | Power conversion device | |
| JP7172910B2 (ja) | 電動機の制御装置 | |
| JP2011004539A (ja) | インバータ装置 | |
| JP2005117757A (ja) | 電流検出回路の故障診断装置およびモータ制御システム | |
| JP7819614B2 (ja) | 電動機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20041207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20041214 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050131 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050301 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20050314 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090401 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20090401 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100401 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110401 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120401 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130401 Year of fee payment: 8 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140401 Year of fee payment: 9 |
|
| LAPS | Cancellation because of no payment of annual fees |