JP2016147652A - 車両用表示制御装置及び車両用表示ユニット - Google Patents
車両用表示制御装置及び車両用表示ユニット Download PDFInfo
- Publication number
- JP2016147652A JP2016147652A JP2015236915A JP2015236915A JP2016147652A JP 2016147652 A JP2016147652 A JP 2016147652A JP 2015236915 A JP2015236915 A JP 2015236915A JP 2015236915 A JP2015236915 A JP 2015236915A JP 2016147652 A JP2016147652 A JP 2016147652A
- Authority
- JP
- Japan
- Prior art keywords
- virtual image
- image display
- emphasized
- vehicle
- display control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000015654 memory Effects 0.000 abstract description 23
- 230000004048 modification Effects 0.000 description 58
- 238000012986 modification Methods 0.000 description 58
- 238000000034 method Methods 0.000 description 26
- 230000008569 process Effects 0.000 description 21
- 230000009471 action Effects 0.000 description 14
- 238000001514 detection method Methods 0.000 description 14
- 238000012544 monitoring process Methods 0.000 description 14
- 230000001276 controlling effect Effects 0.000 description 11
- 230000006870 function Effects 0.000 description 10
- 230000000694 effects Effects 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 238000000926 separation method Methods 0.000 description 8
- 108091033322 FsrA Proteins 0.000 description 6
- 239000000446 fuel Substances 0.000 description 6
- 230000003044 adaptive effect Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 239000003086 colorant Substances 0.000 description 3
- 238000002485 combustion reaction Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000012447 hatching Effects 0.000 description 3
- 239000004973 liquid crystal related substance Substances 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 230000002093 peripheral effect Effects 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 230000004907 flux Effects 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 241001465754 Metazoa Species 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 239000000498 cooling water Substances 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000009751 slip forming Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images

































Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/215—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays characterised by the combination of multiple visual outputs, e.g. combined instruments with analogue meters and additional displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
- B60K35/233—Head-up displays [HUD] controlling the size or position in display areas of virtual images depending on the condition of the vehicle or the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/28—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver
- B60K35/285—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor characterised by the type of the output information, e.g. video entertainment or vehicle dynamics information; characterised by the purpose of the output information, e.g. for attracting the attention of the driver for improving awareness by directing driver's gaze direction or eye points
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/80—Arrangements for controlling instruments
- B60K35/81—Arrangements for controlling instruments for controlling displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/24—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view in front of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
- B60W30/165—Automatically following the path of a preceding lead vehicle, e.g. "electronic tow-bar"
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/177—Augmented reality
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/178—Warnings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/16—Type of output information
- B60K2360/179—Distances to obstacles or vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K2360/00—Indexing scheme associated with groups B60K35/00 or B60K37/00 relating to details of instruments or dashboards
- B60K2360/20—Optical features of instruments
- B60K2360/33—Illumination features
- B60K2360/334—Projection means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/20—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor
- B60K35/21—Output arrangements, i.e. from vehicle to user, associated with vehicle functions or specially adapted therefor using visual output, e.g. blinking lights or matrix displays
- B60K35/23—Head-up displays [HUD]
- B60K35/234—Head-up displays [HUD] controlling the brightness, colour or contrast of virtual images depending on the driving conditions or on the condition of the vehicle or the driver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/60—Instruments characterised by their location or relative disposition in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B60R21/01—Electrical circuits for triggering passive safety arrangements, e.g. airbags, safety belt tighteners, in case of vehicle accidents or impending vehicle accidents
- B60R2021/0104—Communication circuits for data transmission
- B60R2021/01081—Transmission medium
- B60R2021/01095—Transmission medium optical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/307—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing virtually distinguishing relevant parts of a scene from the background of the scene
- B60R2300/308—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing virtually distinguishing relevant parts of a scene from the background of the scene by overlaying the real scene, e.g. through a head-up display on the windscreen
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/146—Display means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0138—Head-up displays characterised by optical features comprising image capture systems, e.g. camera
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/014—Head-up displays characterised by optical features comprising information/image processing systems
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/165—Anti-collision systems for passive traffic, e.g. including static obstacles, trees
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Optics & Photonics (AREA)
- Human Computer Interaction (AREA)
- Instrument Panels (AREA)
- Traffic Control Systems (AREA)
Abstract
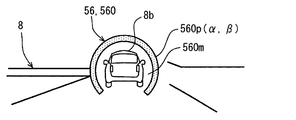
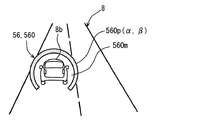
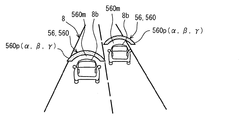
【解決手段】車両用表示制御装置としてのHCUは、外界風景8中の前方障害物8bの周囲のうち下方を除いた一周未満の範囲全域となる虚像表示位置αにおいて、余裕代560mをあけて前方障害物8bを囲む虚像表示サイズβの線状部分560pにより、前方障害物8bを強調するための強調画像560を記憶するメモリと、プロセッサにより構築され、虚像表示位置αと虚像表示サイズβとを制御する虚像表示制御手段とを、備えることを特徴とする。
【選択図】図4
Description
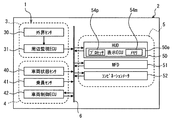
外界風景(8)を透過する投影部材(21)へ表示画像(56)を投影することにより、表示画像を外界風景中の前方障害物(8b)と関連付けて虚像表示させるHUD(50)を搭載した自車両(2)において、当該虚像表示を制御する車両用表示制御装置(54,50e)であって、
前方障害物の周囲のうち下方を除いた一周未満の範囲全域となる虚像表示位置において、余裕代(560m)をあけて前方障害物を囲む虚像表示サイズの線状部分(560p)により、前方障害物を強調するための強調画像(560)を、表示画像として記憶する画像記憶手段(54m)と、
少なくとも一つのプロセッサ(54p)により構築され、虚像表示位置と虚像表示サイズとを制御する虚像表示制御手段(S101,S102,S103,S104,S105,S2000,S2101,S3000,S3101,S5101a,S5101b,S5102,S5103,S5104,S5105,S5203a,S5203b,S5204,S5205,S5303a,S5303b,S5303c,S5304,S5305,S5403a,S5403b,S6101,S6103,S6104,S6105,S6203,S7101,S7102,S7103a,S7103b,S7104,S7105)とを、備えることを特徴とする。
外界風景(8)を透過する投影部材(21)へ表示画像(56)を投影することにより、表示画像を外界風景中の前方障害物(8b)と関連付けて虚像表示させるHUD(50)を搭載した自車両(2)において、当該虚像表示を制御する車両用表示制御装置(54,50e)であって、
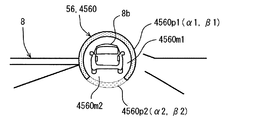
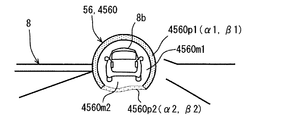
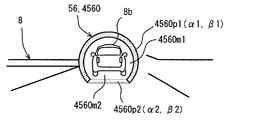
前方障害物の周囲のうち下方を除いた一周未満の範囲全域となる第一虚像表示位置において、余裕代(4560m1)をあけて前方障害物を囲む第一虚像表示サイズの第一線状部分(4560p1)、並びに前方障害物の周囲のうち第一線状部分の両端部間となる第二虚像表示位置において、余裕代(4560m2)をあけると共に第一線状部分よりも低輝度にて前方障害物を囲む第二虚像表示サイズの第二線状部分(4560p2)により、前方障害物を強調するための強調画像(4560)を、表示画像として記憶する画像記憶手段(54m)と、
少なくとも一つのプロセッサ(54p)により構築され、第一虚像表示位置及び第二虚像表示位置を含む虚像表示位置と、第一虚像表示サイズ及び第二虚像表示サイズを含む虚像表示サイズとを制御する虚像表示制御手段(S101,S102,S2100,S2101,S3100,S3101,S4103,S4104,S4105,S5101a,S5101b,S5102,S5103,S5104,S5105,S5203a,S5203b,S5204,S5205,S5303a,S5303b,S5303c,S5304,S5305,S5403a,S5403b,S6101,S6103,S6104,S6105,S6203,S7101,S7102,S7103a,S7103b,S7104,S7105)とを、備えることを特徴とする。
本発明が適用される第一実施形態の走行アシストシステム1は、図1,2に示すように、自車両2に搭載される。
ここまで説明した第一実施形態の作用効果を、以下に説明する。
本発明の第二実施形態は、第一実施形態の変形例である。図7に示すように、第二実施形態の表示制御フローでは、乗員センサ41のうちクルーズ制御スイッチがオンされているか否かを、S2100にて判定する。その結果、否定判定が下される間は、S2100を繰り返して実行する一方、肯定判定が下された場合には、S2101へと移行する。
本発明の第三実施形態は、第一実施形態の変形例である。図9に示すように、第三実施形態の表示制御フローでは、乗員センサ41のうちレーン制御スイッチがオンされているか否かを、S3100にて判定する。その結果、否定判定が下される間は、S3100を繰り返して実行する一方、肯定判定が下された場合には、S3101へと移行する。
本発明の第四実施形態は、第一実施形態の変形例である。図11に示すように第四実施形態では、外界風景8中の前方障害物8bを強調する表示画像56として、第一実施形態とは異なる強調画像4560がメモリ54mに記憶されて虚像表示される。具体的に強調画像4560は、第一虚像表示位置α1において円弧形に湾曲して延びる第一線状部分4560p1と、第二虚像表示位置α2において円弧形に湾曲して延びる第二線状部分4560p2とを、同一幅に連続して形成している。即ち強調画像4560は、全体としては円環線状を呈している。
ここまで説明した第四実施形態の作用効果を、以下に説明する。
本発明の第五実施形態は、第一実施形態の変形例である。図14に示すように、第五実施形態の表示制御フローでは、S101に代えて、S5101a,S5101bを実行する。
本発明の第六実施形態は、第五実施形態の変形例である。図16に示すように、第六実施形態の表示制御フローでは、S5102の実行後に、S5203a,S5203b,S5204,S5205を実行する。
本発明の第七実施形態は、第五実施形態の変形例である。図18に示すように、第七実施形態の表示制御フローでは、S5102の実行後に、S5303a,S5303b,S5303c,S5304,S5305,S5104,S5105を実行する。
本発明の第八実施形態は、第六実施形態の変形例である。図20に示すように、第八実施形態の表示制御フローでは、S5102の実行後に、S5403a,S5403b,S5204,S5205を実行する。
本発明の第九実施形態は、第二実施形態の変形例である。図22に示すように、第九実施形態の表示制御フローでは、S105の実行後に、S6101,S6103,S6104,S6105を実行する。
本発明の第十実施形態は、第九実施形態の変形例である。図24に示すように、第十実施形態の表示制御フローでは、S6101にて肯定判定が下されると、S6203,S6104,S6105を実行する。
本発明の第十一実施形態は、第二実施形態の変形例である。第十一実施形態による車両制御ECU42のうち統合制御ECUは、高速域等の特定車速域での車間距離及び車速を強制的に自動制御するアダプティブクルーズ制御(ACC:Adaptive Cruise Control)を、FSRAに代えて実現する。ここで、ACCを実現する「自動制御ユニット」としての統合制御ECUは、クルーズ制御スイッチがオン操作され、且つ自車両2の車速が特定車速域内に入ると、ユーザによる手動運転を自動制御運転へと切り替える。一方で統合制御ECUは、自動制御運転中にクルーズ制御スイッチがオフ操作される、又は自動制御運転中に車速が特定車速域外に出ると、自動制御運転を手動運転へと切り替える。
S7100では、自車両2の車速が特定車速域内に入っているか否かを、車両状態センサ40のうち車速センサの出力信号に基づき判定する。その結果、否定判定が下される間は、S2100へと戻る。一方、肯定判定が下された場合には、S2101,S102,S103,S104,S105の実行後に、S7101,S7102,S7103a,S7103b,S7104,S7105を実行する。
さて、ここまで本発明の複数の実施形態について説明したが、本発明は、それらの実施形態に限定して解釈されるものではなく、本発明の要旨を逸脱しない範囲内において種々の実施形態及び組み合わせに適用することができる。
Claims (13)
- 外界風景(8)を透過する投影部材(21)へ表示画像(56)を投影することにより、前記表示画像を前記外界風景中の前方障害物(8b)と関連付けて虚像表示させるヘッドアップディスプレイ(50)を搭載した自車両(2)において、当該虚像表示を制御する車両用表示制御装置(54,50e)であって、
前記前方障害物の周囲のうち下方を除いた一周未満の範囲全域となる虚像表示位置において、余裕代(560m)をあけて前記前方障害物を囲む虚像表示サイズの線状部分(560p)により、前記前方障害物を強調するための強調画像(560)を、前記表示画像として記憶する画像記憶手段(54m)と、
少なくとも一つのプロセッサ(54p)により構築され、前記虚像表示位置と前記虚像表示サイズとを制御する虚像表示制御手段(S101,S102,S103,S104,S105,S2100,S2101,S3100,S3101,S5101a,S5101b,S5102,S5103,S5104,S5105,S5203a,S5203b,S5204,S5205,S5303a,S5303b,S5303c,S5304,S5305,S5403a,S5403b,S6101,S6103,S6104,S6105,S6203,S7101,S7102,S7103a,S7103b,S7104,S7105)とを、備えることを特徴とする車両用表示制御装置。 - 前記線状部分は、前記虚像表示位置において円弧形に延びることを特徴とする請求項1に記載の車両用表示制御装置。
- 外界風景(8)を透過する投影部材(21)へ表示画像(56)を投影することにより、前記表示画像を前記外界風景中の前方障害物(8b)と関連付けて虚像表示させるヘッドアップディスプレイ(50)を搭載した自車両(2)において、当該虚像表示を制御する車両用表示制御装置(54,50e)であって、
前記前方障害物の周囲のうち下方を除いた一周未満の範囲全域となる第一虚像表示位置において、余裕代(4560m1)をあけて前記前方障害物を囲む第一虚像表示サイズの第一線状部分(4560p1)、並びに前記前方障害物の周囲のうち前記第一線状部分の両端部間となる第二虚像表示位置において、余裕代(4560m2)をあけると共に前記第一線状部分よりも低輝度にて前記前方障害物を囲む第二虚像表示サイズの第二線状部分(4560p2)により、前記前方障害物を強調するための強調画像(4560)を、前記表示画像として記憶する画像記憶手段(54m)と、
少なくとも一つのプロセッサ(54p)により構築され、前記第一虚像表示位置及び前記第二虚像表示位置を含む虚像表示位置と、前記第一虚像表示サイズ及び前記第二虚像表示サイズを含む虚像表示サイズとを制御する虚像表示制御手段(S101,S102,S2100,S2101,S3100,S3101,S4103,S4104,S4105,S5101a,S5101b,S5102,S5103,S5104,S5105,S5203a,S5203b,S5204,S5205,S5303a,S5303b,S5303c,S5304,S5305,S5403a,S5403b,S6101,S6103,S6104,S6105,S6203,S7101,S7102,S7103a,S7103b,S7104,S7105)とを、備えることを特徴とする車両用表示制御装置。 - 前記第二線状部分は、前記第二虚像表示位置において前記第一線状部分の両端部間を湾曲して延びることを特徴とする請求項3に記載の車両用表示制御装置。
- 前記虚像表示制御手段(S102,S103,S104,S105,S4103,S4104,S4105,S5101a,S5101b,S5102,S5103,S5104,S5105,S5203a,S5203b,S5204,S5205,S5303a,S5303b,S5303c,S5304,S5305,S5403a,S5403b)は、複数の前記前方障害物をそれぞれ個別に強調する前記強調画像の前記虚像表示サイズを、強調する前記前方障害物が前記自車両から遠いほど、小サイズに制御することを特徴とする請求項1〜4のいずれか一項に記載の車両用表示制御装置。
- 前記虚像表示制御手段(S102,S103,S104,S105,S4103,S4104,S4105,S5101a,S5101b,S5102,S5203a,S5203b,S5204,S5205)は、複数の前記前方障害物をそれぞれ個別に強調する前記強調画像の虚像表示形状を、強調する前記前方障害物の種類に応じて異ならせることを特徴とする請求項1〜5のいずれか一項に記載の車両用表示制御装置。
- 前記虚像表示制御手段(S102,S103,S104,S105,S4103,S4104,S4105,S5101a,S5101b,S5102,S5104,S5105,S5303a,S5303b,S5303c,S5304,S5305)は、複数の前記前方障害物をそれぞれ個別に強調する前記強調画像の前記虚像表示位置同士が重畳する場合に、強調する前記前方障害物が前記自車両から遠い前記強調画像の虚像表示を、当該重畳箇所においてカットすることを特徴とする請求項1〜6のいずれか一項に記載の車両用表示制御装置。
- 前記虚像表示制御手段(S102,S103,S104,S105,S4103,S4104,S4105,S5101a,S5101b,S5102,S5204,S5205,S5403a,S5403b)は、複数の前記前方障害物をそれぞれ個別に強調する前記強調画像の虚像表示を、強調する前記前方障害物の周囲のうち下方及び側方を除いた範囲に制限することを特徴とする請求項1〜7のいずれか一項に記載の車両用表示制御装置。
- 前記前方障害物として前記自車両と同一レーンを走行する前方車両に対して車間距離を自動で制御する車間制御ユニット(42)を搭載した前記自車両において、
前記虚像表示制御手段(S102,S103,S104,S105,S2100,S2101,S4103,S4104,S4105,S6101,S6103,S6104,S6105,S6203,S7100,S7101,S7102,S7103a,S7103b,S7104,S7105)は、前記前方車両を強調する位置に、前記強調画像の位置を制御することを特徴とする請求項1〜8のいずれか一項に記載の車両用表示制御装置。 - 前記自車両の走行レーンにおける幅方向位置を自動で制御するレーン制御ユニット(42)を搭載した前記自車両において、
前記虚像表示制御手段(S102,S103,S104,S105,S3100,S3101,S4103,S4104,S4105)は、前記走行レーンと同一又は別のレーンを走行する前記前方障害物としての前方車両を強調する位置に、前記強調画像の位置を制御することを特徴とする請求項1〜9のいずれか一項に記載の車両用表示制御装置。 - 前記虚像表示制御手段(S102,S103,S104,S105,S2100,S2101,S4103,S4104,S4105,S6101,S6103,S6104,S6105,S6203)は、一旦検知した前記前方障害物をロストした場合に、当該前方障害物を強調する前記強調画像の少なくとも一部の虚像表示輝度を低下させることを特徴とする請求項1〜10のいずれか一項に記載の車両用表示制御装置。
- ユーザによる手動運転と自動制御ユニット(42)による自動制御運転とが切り替え可能な前記自車両において、
前記虚像表示制御手段(S102,S103,S104,S105,S2100,S2101,S4103,S4104,S4105,S7100,S7101,S7102,S7103a,S7103b,S7104,S7105)は、前記自動制御運転から前記手動運転への切り替えに伴って、前記強調画像の虚像表示色を変化させることを特徴とする請求項1〜11のいずれか一項に記載の車両用表示制御装置。 - 請求項1〜12のいずれか一項に記載の車両用表示制御装置(54,50e)と、
前記ヘッドアップディスプレイ(50)とを、備えることを特徴とする車両用表示ユニット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/549,489 US20180024354A1 (en) | 2015-02-09 | 2016-01-26 | Vehicle display control device and vehicle display unit |
| PCT/JP2016/000371 WO2016129219A1 (ja) | 2015-02-09 | 2016-01-26 | 車両用表示制御装置及び車両用表示ユニット |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015023621 | 2015-02-09 | ||
| JP2015023621 | 2015-02-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016147652A true JP2016147652A (ja) | 2016-08-18 |
| JP6520668B2 JP6520668B2 (ja) | 2019-05-29 |
Family
ID=56691042
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015236915A Active JP6520668B2 (ja) | 2015-02-09 | 2015-12-03 | 車両用表示制御装置及び車両用表示ユニット |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20180024354A1 (ja) |
| JP (1) | JP6520668B2 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018151900A (ja) * | 2017-03-14 | 2018-09-27 | オムロン株式会社 | 運転状態判定装置、運転状態判定方法及び運転状態判定のためのプログラム |
| WO2019057439A1 (de) * | 2017-09-21 | 2019-03-28 | Volkswagen Aktiengesellschaft | Verfahren, vorrichtung und computerlesbares speichermedium mit instruktionen zur steuerung einer anzeige einer augmented-reality-head-up-display-vorrichtung für ein kraftfahrzeug |
| WO2019221112A1 (ja) * | 2018-05-15 | 2019-11-21 | 日本精機株式会社 | 車両用表示装置 |
| JP2019202556A (ja) * | 2018-05-21 | 2019-11-28 | 日本精機株式会社 | 車両用表示装置、車両用表示装置の制御方法、車両用表示装置の制御プログラム |
| JP2019207585A (ja) * | 2018-05-30 | 2019-12-05 | 株式会社デンソー | 移動体、制御装置およびセンサの動作診断方法 |
| CN111247046A (zh) * | 2017-11-30 | 2020-06-05 | 大众汽车有限公司 | 用于在车辆中显示可至少部分自动执行的驾驶机动的可执行性的方法和设备 |
| JP2020135768A (ja) * | 2019-02-25 | 2020-08-31 | トヨタ自動車株式会社 | 車両用表示デバイス |
| EP3544293A4 (en) * | 2016-11-21 | 2020-12-16 | Kyocera Corporation | IMAGE PROCESSING DEVICE, IMAGING DEVICE AND DISPLAY SYSTEM |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6277933B2 (ja) * | 2014-10-10 | 2018-02-14 | 株式会社デンソー | 表示制御装置、表示システム |
| JP6222786B2 (ja) * | 2015-12-07 | 2017-11-01 | 株式会社Subaru | 車両の走行制御装置 |
| GB201702309D0 (en) * | 2017-02-13 | 2017-03-29 | Jaguar Land Rover Ltd | An apparatus and a method for controlling a head-up display of a vehicle |
| KR102449834B1 (ko) * | 2017-02-17 | 2022-09-29 | 스미도모쥬기가이고교 가부시키가이샤 | 작업기계용 주변감시 시스템 |
| JP6806914B2 (ja) | 2017-09-22 | 2021-01-06 | マクセル株式会社 | 表示システム及び表示方法 |
| US20190279512A1 (en) * | 2018-03-12 | 2019-09-12 | Ford Global Technologies, Llc. | Vehicle cameras for monitoring off-road terrain |
| DE102018204254B4 (de) * | 2018-03-20 | 2020-12-03 | Volkswagen Aktiengesellschaft | Verfahren zur Berechnung einer Einblendung von Zusatzinformationen für eine Anzeige auf einer Anzeigeeinheit, Vorrichtung zur Durchführung des Verfahrens sowie Kraftfahrzeug und Computerprogramm |
| US10676103B2 (en) * | 2018-05-17 | 2020-06-09 | Aptiv Technologies Limited | Object position history playback for automated vehicle transition from autonomous-mode to manual-mode |
| JP7338625B2 (ja) | 2018-07-05 | 2023-09-05 | 日本精機株式会社 | ヘッドアップディスプレイ装置 |
| CN118991421A (zh) * | 2018-10-23 | 2024-11-22 | 麦克赛尔株式会社 | 车辆 |
| DE102019000899B4 (de) | 2019-02-07 | 2023-05-04 | Mercedes-Benz Group AG | Verfahren und Vorrichtung zur Unterstützung eines Fahrers eines Fahrzeugs |
| FR3120042A1 (fr) * | 2021-02-25 | 2022-08-26 | Psa Automobiles Sa | Procédé d’aide à la gestion de la distance inter véhicule mettant en œuvre un affichage en réalité augmentée. |
| JP7574113B2 (ja) * | 2021-03-12 | 2024-10-28 | 本田技研工業株式会社 | 注意喚起システム、及び注意喚起方法 |
| JP7558850B2 (ja) * | 2021-03-12 | 2024-10-01 | 本田技研工業株式会社 | 注意喚起システム、及び注意喚起方法 |
| JP7517252B2 (ja) * | 2021-06-04 | 2024-07-17 | トヨタ自動車株式会社 | 車両用表示装置、車両用表示システム、車両用表示方法及びプログラム |
| US20230100857A1 (en) * | 2021-09-25 | 2023-03-30 | Kipling Martin | Vehicle remote control system |
| CN114093186B (zh) * | 2021-11-17 | 2022-11-25 | 中国第一汽车股份有限公司 | 车辆预警信息提示系统、方法及存储介质 |
| US11697346B1 (en) * | 2022-03-29 | 2023-07-11 | GM Global Technology Operations LLC | Lane position in augmented reality head-up display system |
| GB2627180A (en) * | 2023-01-26 | 2024-08-21 | Bentley Motors Ltd | Ambient output system |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0894756A (ja) * | 1994-09-21 | 1996-04-12 | Nippondenso Co Ltd | 車間距離表示装置及びターゲットクルーズ |
| JP2010120617A (ja) * | 2008-11-24 | 2010-06-03 | Denso Corp | 画像生成装置、ヘッドアップディスプレイ装置および車両用表示装置 |
| JP2012063918A (ja) * | 2010-09-15 | 2012-03-29 | Toyota Motor Corp | 車両用周囲画像表示装置及び方法 |
| JP2014075079A (ja) * | 2012-10-05 | 2014-04-24 | Denso Corp | 表示装置 |
| JP2015000630A (ja) * | 2013-06-14 | 2015-01-05 | 株式会社デンソー | 車載表示装置およびプログラム |
| JP2015127160A (ja) * | 2013-12-27 | 2015-07-09 | トヨタ自動車株式会社 | 車両用情報表示装置及び車両用情報表示方法 |
| WO2015152304A1 (ja) * | 2014-03-31 | 2015-10-08 | エイディシーテクノロジー株式会社 | 運転支援装置、及び運転支援システム |
Family Cites Families (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4134785B2 (ja) * | 2003-03-28 | 2008-08-20 | 株式会社デンソー | 表示装置 |
| JP4274111B2 (ja) * | 2004-12-02 | 2009-06-03 | 株式会社デンソー | 適正車間距離表示制御装置 |
| WO2008029802A1 (fr) * | 2006-09-04 | 2008-03-13 | Panasonic Corporation | Dispositif fournissant des informations de voyage |
| US20080284750A1 (en) * | 2007-05-15 | 2008-11-20 | High Tech Computer, Corp. | Method for multiple selections for an electronic device and the software thereof |
| EP2193512A4 (en) * | 2007-09-17 | 2013-11-13 | Volvo Technology Corp | METHOD FOR TRANSMITTING A DEVIATION OF A VEHICLE PARAMETER |
| JP4475308B2 (ja) * | 2007-09-18 | 2010-06-09 | 株式会社デンソー | 表示装置 |
| JP2009126249A (ja) * | 2007-11-20 | 2009-06-11 | Honda Motor Co Ltd | 車両用情報表示装置 |
| CN101889299B (zh) * | 2007-12-05 | 2013-02-06 | 博世株式会社 | 车辆信息显示系统 |
| DE102009004432B4 (de) * | 2008-01-25 | 2016-12-08 | Denso Corporation | Kraftfahrzeuganzeigevorrichtung zum Anzeigen eines ein vorderes Hindernis umkreisenden Bildflecks |
| WO2009109014A1 (en) * | 2008-03-05 | 2009-09-11 | Rpo Pty Limited | Methods for operation of a touch input device |
| US8237666B2 (en) * | 2008-10-10 | 2012-08-07 | At&T Intellectual Property I, L.P. | Augmented I/O for limited form factor user-interfaces |
| JP2010108264A (ja) * | 2008-10-30 | 2010-05-13 | Honda Motor Co Ltd | 車両周辺監視装置 |
| JP2011079345A (ja) * | 2009-10-02 | 2011-04-21 | Denso Corp | 車両用ヘッドアップディスプレイ |
| US8890818B2 (en) * | 2010-09-22 | 2014-11-18 | Nokia Corporation | Apparatus and method for proximity based input |
| JP5754605B2 (ja) * | 2011-11-01 | 2015-07-29 | アイシン精機株式会社 | 障害物警報装置 |
| BR112014016946A8 (pt) * | 2012-01-12 | 2017-07-04 | Honda Motor Co Ltd | aparelho de assistência à condução sincronizada e sistema de assistência à condução sincronizada |
| KR101957943B1 (ko) * | 2012-08-31 | 2019-07-04 | 삼성전자주식회사 | 정보 제공 방법 및 이를 위한 정보 제공 차량 |
| EP2936240B1 (en) * | 2012-12-21 | 2022-05-18 | Harman Becker Automotive Systems GmbH | Infotainment system |
| FR3000570B1 (fr) * | 2012-12-28 | 2016-04-29 | Valeo Etudes Electroniques | Afficheur pour afficher dans le champ de vision d'un conducteur de vehicule une image virtuelle et dispositif de generation d'images pour ledit afficheur |
| JP6056612B2 (ja) * | 2013-03-29 | 2017-01-11 | アイシン精機株式会社 | 画像表示制御装置および画像表示システム |
| JP6094399B2 (ja) * | 2013-06-24 | 2017-03-15 | 株式会社デンソー | ヘッドアップディスプレイ、及びプログラム |
| JP5983547B2 (ja) * | 2013-07-02 | 2016-08-31 | 株式会社デンソー | ヘッドアップディスプレイ及びプログラム |
| US9639990B2 (en) * | 2013-10-03 | 2017-05-02 | Panasonic Intellectual Property Management Co., Ltd. | Display control apparatus, computer-implemented method, storage medium, and projection apparatus |
| JP6264037B2 (ja) * | 2013-12-27 | 2018-01-24 | トヨタ自動車株式会社 | 車両用情報表示装置及び車両用情報表示方法 |
| EP3118047B1 (en) * | 2014-03-13 | 2021-09-15 | Panasonic Intellectual Property Management Co., Ltd. | Display control device, display device, display control program, display control method, and recording medium |
| JP6481846B2 (ja) * | 2014-03-27 | 2019-03-13 | 日本精機株式会社 | 車両用警報装置 |
| KR101583950B1 (ko) * | 2014-06-30 | 2016-01-08 | 현대자동차주식회사 | 차량정보 표시장치 및 그 표시방법 |
| WO2016002007A1 (ja) * | 2014-07-01 | 2016-01-07 | 日産自動車株式会社 | 車両用表示装置及び車両用表示方法 |
| JP2016033729A (ja) * | 2014-07-31 | 2016-03-10 | クラリオン株式会社 | 周囲環境認識装置 |
| CN106687327B (zh) * | 2014-09-29 | 2018-12-11 | 矢崎总业株式会社 | 车辆显示装置 |
| KR101601553B1 (ko) * | 2014-12-03 | 2016-03-21 | 현대자동차주식회사 | 차량의 주행 제어 시스템 및 주행 제어 시스템에서 속도 설정 모드를 변경하는 방법 |
| WO2016092591A1 (ja) * | 2014-12-09 | 2016-06-16 | 三菱電機株式会社 | 衝突リスク算出装置、衝突リスク表示装置、車体制御装置 |
| JP6485732B2 (ja) * | 2014-12-10 | 2019-03-20 | 株式会社リコー | 情報提供装置、情報提供方法及び情報提供用制御プログラム |
| JP6265179B2 (ja) * | 2015-08-03 | 2018-01-24 | トヨタ自動車株式会社 | 表示装置 |
-
2015
- 2015-12-03 JP JP2015236915A patent/JP6520668B2/ja active Active
-
2016
- 2016-01-26 US US15/549,489 patent/US20180024354A1/en not_active Abandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0894756A (ja) * | 1994-09-21 | 1996-04-12 | Nippondenso Co Ltd | 車間距離表示装置及びターゲットクルーズ |
| JP2010120617A (ja) * | 2008-11-24 | 2010-06-03 | Denso Corp | 画像生成装置、ヘッドアップディスプレイ装置および車両用表示装置 |
| JP2012063918A (ja) * | 2010-09-15 | 2012-03-29 | Toyota Motor Corp | 車両用周囲画像表示装置及び方法 |
| JP2014075079A (ja) * | 2012-10-05 | 2014-04-24 | Denso Corp | 表示装置 |
| JP2015000630A (ja) * | 2013-06-14 | 2015-01-05 | 株式会社デンソー | 車載表示装置およびプログラム |
| JP2015127160A (ja) * | 2013-12-27 | 2015-07-09 | トヨタ自動車株式会社 | 車両用情報表示装置及び車両用情報表示方法 |
| WO2015152304A1 (ja) * | 2014-03-31 | 2015-10-08 | エイディシーテクノロジー株式会社 | 運転支援装置、及び運転支援システム |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3544293A4 (en) * | 2016-11-21 | 2020-12-16 | Kyocera Corporation | IMAGE PROCESSING DEVICE, IMAGING DEVICE AND DISPLAY SYSTEM |
| JP2018151900A (ja) * | 2017-03-14 | 2018-09-27 | オムロン株式会社 | 運転状態判定装置、運転状態判定方法及び運転状態判定のためのプログラム |
| WO2019057439A1 (de) * | 2017-09-21 | 2019-03-28 | Volkswagen Aktiengesellschaft | Verfahren, vorrichtung und computerlesbares speichermedium mit instruktionen zur steuerung einer anzeige einer augmented-reality-head-up-display-vorrichtung für ein kraftfahrzeug |
| US11250816B2 (en) | 2017-09-21 | 2022-02-15 | Volkswagen Aktiengesellschaft | Method, device and computer-readable storage medium with instructions for controlling a display of an augmented-reality head-up display device for a transportation vehicle |
| CN111247046A (zh) * | 2017-11-30 | 2020-06-05 | 大众汽车有限公司 | 用于在车辆中显示可至少部分自动执行的驾驶机动的可执行性的方法和设备 |
| CN111247046B (zh) * | 2017-11-30 | 2023-12-05 | 大众汽车有限公司 | 用于在车辆中显示可至少部分自动执行的驾驶机动的可执行性的方法和设备 |
| JPWO2019221112A1 (ja) * | 2018-05-15 | 2021-06-10 | 日本精機株式会社 | 車両用表示装置 |
| JP7327393B2 (ja) | 2018-05-15 | 2023-08-16 | 日本精機株式会社 | 車両用表示装置 |
| WO2019221112A1 (ja) * | 2018-05-15 | 2019-11-21 | 日本精機株式会社 | 車両用表示装置 |
| JP2019202556A (ja) * | 2018-05-21 | 2019-11-28 | 日本精機株式会社 | 車両用表示装置、車両用表示装置の制御方法、車両用表示装置の制御プログラム |
| JP7041845B2 (ja) | 2018-05-21 | 2022-03-25 | 日本精機株式会社 | 車両用表示装置、車両用表示装置の制御方法、車両用表示装置の制御プログラム |
| WO2019230630A1 (ja) * | 2018-05-30 | 2019-12-05 | 株式会社デンソー | 移動体、制御装置およびセンサの動作診断方法 |
| JP2019207585A (ja) * | 2018-05-30 | 2019-12-05 | 株式会社デンソー | 移動体、制御装置およびセンサの動作診断方法 |
| JP2020135768A (ja) * | 2019-02-25 | 2020-08-31 | トヨタ自動車株式会社 | 車両用表示デバイス |
| JP7272007B2 (ja) | 2019-02-25 | 2023-05-12 | トヨタ自動車株式会社 | 車両用表示制御装置、車両用表示装置、車両用表示制御方法及び車両用表示制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6520668B2 (ja) | 2019-05-29 |
| US20180024354A1 (en) | 2018-01-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6520668B2 (ja) | 車両用表示制御装置及び車両用表示ユニット | |
| US10663315B2 (en) | Vehicle display control device and vehicle display control method | |
| EP3147149B1 (en) | Display device | |
| JP6443716B2 (ja) | 画像表示装置、画像表示方法及び画像表示制御プログラム | |
| US11544975B2 (en) | Vehicle control apparatus and display control method | |
| WO2018139139A1 (ja) | 車両用表示装置 | |
| JPWO2015037117A1 (ja) | 情報表示システム及び情報表示装置 | |
| GB2498035A (en) | A method for informing a motor vehicle driver of a driving manoeuvre | |
| JP6969509B2 (ja) | 車両用表示制御装置、車両用表示制御方法、及び制御プログラム | |
| JP6748947B2 (ja) | 画像表示装置、移動体、画像表示方法及びプログラム | |
| JP2017186008A (ja) | 情報表示システム | |
| WO2016129219A1 (ja) | 車両用表示制御装置及び車両用表示ユニット | |
| WO2022168540A1 (ja) | 表示制御装置及び表示制御プログラム | |
| JP6589775B2 (ja) | 車両用表示制御装置及び車両用表示システム | |
| JP2020095044A (ja) | 表示制御装置及び表示制御方法 | |
| JP2023123208A (ja) | 車両用表示制御装置、表示制御方法、表示制御プログラム | |
| JP7590244B2 (ja) | 車両制御装置、車両、車両制御装置の動作方法及びプログラム | |
| JP2017040773A (ja) | 頭部装着型表示装置 | |
| JP6814416B2 (ja) | 情報提供装置、情報提供方法及び情報提供用制御プログラム | |
| JP6973462B2 (ja) | 車両用表示制御装置 | |
| JP7014254B2 (ja) | 車両用表示制御装置及び車両用表示制御方法 | |
| JP7054483B2 (ja) | 情報提供装置、情報提供方法及び情報提供用制御プログラム | |
| US20240255756A1 (en) | Control apparatus, control method, storage medium, and movable apparatus | |
| JP2025003145A (ja) | 表示装置、制御方法及びプログラム | |
| JP2021028777A (ja) | 表示制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180413 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190325 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190415 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6520668 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |