JP2015078043A - エレベーターの長尺物引掛り検出装置 - Google Patents
エレベーターの長尺物引掛り検出装置 Download PDFInfo
- Publication number
- JP2015078043A JP2015078043A JP2013215997A JP2013215997A JP2015078043A JP 2015078043 A JP2015078043 A JP 2015078043A JP 2013215997 A JP2013215997 A JP 2013215997A JP 2013215997 A JP2013215997 A JP 2013215997A JP 2015078043 A JP2015078043 A JP 2015078043A
- Authority
- JP
- Japan
- Prior art keywords
- long object
- rope
- elevator
- distance
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/02—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions
- B66B5/021—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions the abnormal operating conditions being independent of the system
- B66B5/022—Applications of checking, fault-correcting, or safety devices in elevators responsive to abnormal operating conditions the abnormal operating conditions being independent of the system where the abnormal operating condition is caused by a natural event, e.g. earthquake
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B5/00—Applications of checking, fault-correcting, or safety devices in elevators
- B66B5/0006—Monitoring devices or performance analysers
- B66B5/0018—Devices monitoring the operating condition of the elevator system
- B66B5/0031—Devices monitoring the operating condition of the elevator system for safety reasons
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Environmental & Geological Engineering (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Remote Sensing (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Operating, Guiding And Securing Of Roll- Type Closing Members (AREA)
Abstract
地震等の揺れの収束後に、昇降路内の突起物へのロープなどの長尺物の引掛りの有無を確実に判定できるエレベーターの長尺物引掛り検出装置を提供する。
【解決手段】
エレベーターの昇降路内の画像を取得する撮像部5と、撮像部5が取得した昇降路内画像に基づいて、昇降路内においてロープが向かう方向を計測する方向計測部28と、昇降路内の突起物とロープとの距離を計測する距離計測部29と、方向計測部28が計測した方向または距離計測部29が計測した突起物とロープとの距離に基づいて、突起物へのロープの引掛りの有無を判定する引掛り有無判定部30とを備える。
【選択図】図8
Description
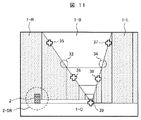
図1は、昇降路内においてロープが突起物に引掛った様子を示す。図1(a)はエレベーター昇降路1内を乗場ドア100の側面方向から見た図であり、図1(b)は同昇降路1内を乗場ドア100の正面側方向から見た図である。エレベーターの乗りかごの上部には停止階床検出装置(図示せず)が設置されているが、これは磁気センサまたは光電センサである。そして、昇降路側には、各階床のドアの上部に遮蔽板2(構造の詳細は図示せず)が取り付けられている。遮蔽板2(2−1〜2−7)は、エレベーターの乗りかごがいずれかの階床に停止した場合に、遮蔽板2のいずれかが、停止階床検出装置の磁気または光を遮ることにより、乗りかごの停止または停止位置を検出する。このため、遮蔽板2は、昇降路の上階床から下階床に至るまで、鉛直方向すなわち重力方向に一列に並んで取り付けられる。
[構成例]
図8は、本発明の第一の実施例であるエレベーターの長尺物引掛り検出装置の構成を示すブロック図である。エレベーターの長尺物引掛り検出装置20は、撮像部5と、設定ツール21と、領域マップ保持部25と、時間平均化部26と、ロープ検出部27と、方向計測部28と、距離計測部29と、引掛り有無判定部30と、判定結果出力部31を備える。そして、設定ツール21は、表示部22と、指示部23と、領域マップ作成部24を備える。
[動作説明]
図10は、図8に示した実施例であるエレベーターの長尺物引掛り検出装置が実行する画像処理を示すフローチャートである。
[設定ツール]
次に、図8に示した設定ツール21による領域マップの作成について説明する。設定ツール21は、例えば、パーソナルコンピュータなどによって構成する。
1−B,1−C,1−L,1−R…昇降路壁
2,2−1,2−2,2−3,2−4,2−5,2−6,2−7…遮蔽板
2−5R…距離円
3,6,7,8,11,14…ロープ(引掛り無し)
4,9A,9B,10,12A,12B,13,15A,15B,16,17…ロープ(引掛りあり)
5,5−1,5−2,5−3,5−4…撮像部
F1,F2,F3,F4…階床の境目
20,50…エレベーターの長尺物引掛り検出装置
21…設定ツール
22…表示部
23…指示部
24…領域マップ作成部
25…領域マップ保持部
26…時間平均化部
27…ロープ検出部
28…方向計測部
29…距離計測部
30…引掛り有無判定部
31…判定結果出力部
32…サークルテンプレート
33,34…建物柱
35,36,37,38,40,41,42,43…指示点
39,44…消失点
45…振動センサ
46…起動部
47…乗りかご停止階床判定部
48…総合判定部
49…エレベーター自動復旧装置
51…3次元距離センサ
100…乗場ドア
101…巻上機設置床
102…制御ケーブル
103…制御ケーブル102の起点
104…主ロープ
105…主ロープ104の起点
106…主ロープ104の起点
107…ガバナロープ
108…プーリ
109…ガバナロープ107の起点
110…ガバナロープ107の起点
111…コンペンロープ
112…乗りかご
113…コンペンロープ111の起点
114…錘
115…コンペンロープ111の起点
Claims (9)
- エレベーターの昇降路内における突起物への長尺物の引掛りを、前記昇降路内の画像によって検出するエレベーターの長尺物引掛り検出装置において、
前記画像を取得する撮像部と、
前記撮像部が取得した前記画像に基づいて、前記突起物と前記長尺物との距離、もしくは前記長尺物が向かう方向を計測する計測部と、
前記計測部が計測した前記距離または前記方向に基づいて、前記突起物への前記長尺物の引掛りの有無を判定する判定部と、
を備えることを特徴とするエレベーターの長尺物引掛り検出装置。 - 請求項1において、
前記撮像部は、前記昇降路内において、前記突起物が位置する昇降路壁に設置されることを特徴とするエレベーターの長尺物引掛り検出装置。 - 請求項1または2において、
前記計測部は、時間平均された前記画像に基づいて前記距離または前記方向を計測することを特徴とするエレベーターの長尺物引掛り検出装置。 - 請求項1ないし3のいずれか一項において、
さらに3次元距離センサを備え、
前記3次元距離センサによって、前記突起物から所定の3次元的距離の範囲内に存在する物体を検出し、
前記計測部は、前記3次元距離センサによって検出された前記物体が位置する画像上の領域のみについて前記突起物と前記長尺物との前記距離、もしくは前記方向を計測することを特徴とするエレベーターの長尺物引掛り検出装置。 - 請求項1ないし4のいずれか一項において、
前記判定部は、前記突起物と前記長尺物との前記距離が所定の距離内に位置する前記長尺物については引掛り有りと判定することを特徴とするエレベーターの長尺物引掛り検出装置。 - 請求項1ないし4のいずれか一項において、
前記判定部は、前記長尺物が向かう方向が、前記突起物に向かう方向である場合に、前記長尺物の引掛り有りと判定することを特徴とするエレベーターの長尺物引掛り検出装置。 - 請求項1ないし6のいずれか一項において、
前記突起物の位置、および引掛りの無い前記長尺物が向かう方向が記録された領域マップを予め保持する領域マップ保持部を備え、
前記計測部は、前記領域マップ保持部から前記領域マップを読み出し、読み出した前記領域マップに基づいて、前記突起物と前記長尺物との前記距離、もしくは前記長尺物が向かう前記方向を計測することを特徴とするエレベーターの長尺物引掛り検出装置。 - エレベーターの昇降路内における突起物への長尺物の引掛りを、前記昇降路内の画像によって検出するエレベーターの長尺物引掛り検出装置において、
前記エレベーターが設置される建物に設置される振動センサと、
前記振動センサが前記建物の揺れを検出した場合、前記建物の複数階床において前記長尺物の引掛りの有無を判定する複数の引掛り検出部と、
前記複数の引掛り検出部が出力する複数の判定結果の論理和によって前記長尺物の引掛りの有無を判定する総合判定部と、
を備え、
前記複数の引掛り検出部の各々が、
前記画像を取得する撮像部と、
前記撮像部が取得した前記画像に基づいて、前記突起物と前記長尺物との距離、もしくは前記長尺物が向かう方向を計測する計測部と、
前記計測部が計測した前記距離または前記方向に基づいて、前記突起物への前記長尺物の引掛りの有無を判定する判定部と、
を備えることを特徴とするエレベーターの長尺物引掛り検出装置。 - 請求項8において、
前記振動センサが前記建物の揺れの収束を検出し、かつ前記総合判定部が前記長尺物の引掛りが無いと判定した場合に、前記エレベーターを自動復旧するエレベーター自動復旧装置を備えることを特徴とするエレベーターの長尺物引掛り検出装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013215997A JP6205234B2 (ja) | 2013-10-17 | 2013-10-17 | エレベーターの長尺物引掛り検出装置 |
| CN201410406642.1A CN104555634B (zh) | 2013-10-17 | 2014-08-18 | 电梯的长条物钩挂检测装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013215997A JP6205234B2 (ja) | 2013-10-17 | 2013-10-17 | エレベーターの長尺物引掛り検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015078043A true JP2015078043A (ja) | 2015-04-23 |
| JP6205234B2 JP6205234B2 (ja) | 2017-09-27 |
Family
ID=53009860
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013215997A Active JP6205234B2 (ja) | 2013-10-17 | 2013-10-17 | エレベーターの長尺物引掛り検出装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6205234B2 (ja) |
| CN (1) | CN104555634B (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019099376A (ja) * | 2017-12-06 | 2019-06-24 | フジテック株式会社 | ロープ振れ検出装置 |
| JP2020063127A (ja) * | 2018-10-17 | 2020-04-23 | フジテック株式会社 | 長尺物引掛り検出装置 |
| JP2021054575A (ja) * | 2019-09-30 | 2021-04-08 | 株式会社タダノ | ロープ絡まり検出装置 |
| WO2022195858A1 (ja) * | 2021-03-19 | 2022-09-22 | 三菱電機ビルテクノサービス株式会社 | エレベーター装置 |
| JP7147943B1 (ja) | 2021-09-07 | 2022-10-05 | フジテック株式会社 | エレベータシステム |
| WO2023238217A1 (ja) * | 2022-06-07 | 2023-12-14 | 三菱電機株式会社 | エレベーターの長尺物点検装置 |
| WO2024057445A1 (ja) * | 2022-09-14 | 2024-03-21 | 三菱電機ビルソリューションズ株式会社 | エレベーター |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108375414B (zh) * | 2018-01-23 | 2020-03-31 | 西安理工大学 | 一种印刷纸带横向振动测试装置及测试方法 |
| JP6744453B1 (ja) * | 2019-05-09 | 2020-08-19 | 東芝エレベータ株式会社 | 異常診断システム |
| JP7388600B2 (ja) * | 2021-07-19 | 2023-11-29 | 三菱電機ビルソリューションズ株式会社 | 姿勢確認部材、姿勢確認システムおよびエレベーターシステム |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60132883A (ja) * | 1983-12-16 | 1985-07-15 | 三菱電機株式会社 | 地震後のエレベ−タ監視装置 |
| JPH1179589A (ja) * | 1997-09-11 | 1999-03-23 | Mitsubishi Denki Bill Techno Service Kk | エレベータ主ロープの異常検出装置 |
| JP2007131360A (ja) * | 2005-11-08 | 2007-05-31 | Kajima Corp | エレベータ管制運転装置 |
| JP2009166939A (ja) * | 2008-01-15 | 2009-07-30 | Mitsubishi Electric Corp | エレベータ管制運転装置 |
| JP2014005117A (ja) * | 2012-06-25 | 2014-01-16 | Mitsubishi Electric Building Techno Service Co Ltd | エレベータ昇降路内の長尺物点検装置及び長尺物点検方法 |
| JP2015020863A (ja) * | 2013-07-19 | 2015-02-02 | 三菱電機ビルテクノサービス株式会社 | エレベータ長尺物点検装置およびエレベータ長尺物点検方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10258976A (ja) * | 1997-03-17 | 1998-09-29 | Toshiba Elevator Kk | エレベータのガバナロープ異常検知装置 |
| JP4399438B2 (ja) * | 2006-06-16 | 2010-01-13 | 株式会社日立製作所 | エレベーター装置 |
| JP5183185B2 (ja) * | 2007-12-14 | 2013-04-17 | 株式会社日立製作所 | エレベーター装置及びエレベーターの管制運転方法 |
| JP4675390B2 (ja) * | 2008-03-18 | 2011-04-20 | 三菱電機株式会社 | エレベータの地震復旧装置 |
| CN101811635B (zh) * | 2009-02-20 | 2012-09-26 | 三菱电机株式会社 | 电梯的绳索摆动检测装置及地震自动恢复运转控制方法 |
| JP2012017192A (ja) * | 2010-07-09 | 2012-01-26 | Mitsubishi Electric Corp | エレベーターの長尺物振動検出装置及び管制運転装置 |
-
2013
- 2013-10-17 JP JP2013215997A patent/JP6205234B2/ja active Active
-
2014
- 2014-08-18 CN CN201410406642.1A patent/CN104555634B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60132883A (ja) * | 1983-12-16 | 1985-07-15 | 三菱電機株式会社 | 地震後のエレベ−タ監視装置 |
| JPH1179589A (ja) * | 1997-09-11 | 1999-03-23 | Mitsubishi Denki Bill Techno Service Kk | エレベータ主ロープの異常検出装置 |
| JP2007131360A (ja) * | 2005-11-08 | 2007-05-31 | Kajima Corp | エレベータ管制運転装置 |
| JP2009166939A (ja) * | 2008-01-15 | 2009-07-30 | Mitsubishi Electric Corp | エレベータ管制運転装置 |
| JP2014005117A (ja) * | 2012-06-25 | 2014-01-16 | Mitsubishi Electric Building Techno Service Co Ltd | エレベータ昇降路内の長尺物点検装置及び長尺物点検方法 |
| JP2015020863A (ja) * | 2013-07-19 | 2015-02-02 | 三菱電機ビルテクノサービス株式会社 | エレベータ長尺物点検装置およびエレベータ長尺物点検方法 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019099376A (ja) * | 2017-12-06 | 2019-06-24 | フジテック株式会社 | ロープ振れ検出装置 |
| JP2021008366A (ja) * | 2017-12-06 | 2021-01-28 | フジテック株式会社 | ロープ振れ検出装置 |
| JP2020063127A (ja) * | 2018-10-17 | 2020-04-23 | フジテック株式会社 | 長尺物引掛り検出装置 |
| JP2021054575A (ja) * | 2019-09-30 | 2021-04-08 | 株式会社タダノ | ロープ絡まり検出装置 |
| JP7363294B2 (ja) | 2019-09-30 | 2023-10-18 | 株式会社タダノ | ロープ絡まり検出装置 |
| WO2022195858A1 (ja) * | 2021-03-19 | 2022-09-22 | 三菱電機ビルテクノサービス株式会社 | エレベーター装置 |
| JP7147943B1 (ja) | 2021-09-07 | 2022-10-05 | フジテック株式会社 | エレベータシステム |
| JP2023038820A (ja) * | 2021-09-07 | 2023-03-17 | フジテック株式会社 | エレベータシステム |
| WO2023238217A1 (ja) * | 2022-06-07 | 2023-12-14 | 三菱電機株式会社 | エレベーターの長尺物点検装置 |
| WO2024057445A1 (ja) * | 2022-09-14 | 2024-03-21 | 三菱電機ビルソリューションズ株式会社 | エレベーター |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104555634A (zh) | 2015-04-29 |
| CN104555634B (zh) | 2016-09-28 |
| JP6205234B2 (ja) | 2017-09-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6205234B2 (ja) | エレベーターの長尺物引掛り検出装置 | |
| CN107207200B (zh) | 用于升降机应用的实时绳索/线缆/带摇摆监测系统 | |
| JP5514234B2 (ja) | エレベータの速度計測装置、エレベータ | |
| JP6329304B1 (ja) | ロープ検査装置 | |
| CN107487676A (zh) | 用于电梯操作的检测和控制系统 | |
| CN107314807B (zh) | 一种钢丝绳横向空间振动测量的方法 | |
| JP6132690B2 (ja) | エレベータ長尺物点検装置およびエレベータ長尺物点検方法 | |
| JP6778648B2 (ja) | エレベーター装置及びエレベーター装置の制御方法 | |
| JP2009012903A (ja) | エレベータ用ワイヤーロープの素線切れ検査装置及びその方法 | |
| JP2010006496A (ja) | エレベーターの復旧運転方法および装置 | |
| KR20210013287A (ko) | 엘리베이터의 승강로 내부의 상태를 제시하는 기능을 구비한 점검 장치 | |
| JP6835026B2 (ja) | ロープ振れ検出装置 | |
| JP6699179B2 (ja) | 画像処理装置 | |
| JP6784285B2 (ja) | 長尺物引掛り検出装置 | |
| JP7167994B2 (ja) | エレベーターの昇降路の内部を点検する機能を備えた点検装置および点検システム | |
| JP4561266B2 (ja) | 落下物検知装置 | |
| JP6737254B2 (ja) | 情報処理装置 | |
| JP2020132426A (ja) | 長尺物振れ検出装置 | |
| JP2015168272A (ja) | 隙間落ち検知システム | |
| CN110937481B (zh) | 电梯底坑内侧的水检测 | |
| WO2023238217A1 (ja) | エレベーターの長尺物点検装置 | |
| JP7147943B1 (ja) | エレベータシステム | |
| JP2013203484A (ja) | 乗客コンベア | |
| JP6657297B2 (ja) | エレベータ監視システムおよびエレベータ監視方法 | |
| JP2023178558A (ja) | エレベーターのロープ検査システム、及び、エレベーターのロープ検査方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160713 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170428 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170509 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170703 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20170822 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20170904 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6205234 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |