[第1の実施の形態]
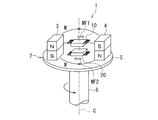
以下、本発明の実施の形態について図面を参照して詳細に説明する。始めに、図1、図2および図4を参照して、本発明の第1の実施の形態に係る回転磁界センサの概略の構成について説明する。図1は、本実施の形態に係る回転磁界センサの概略の構成を示す斜視図である。図2は、本実施の形態に係る回転磁界センサの概略の構成を示す側面図である。図4は、本実施の形態における方向と角度の定義を示す説明図である。
本実施の形態に係る回転磁界センサ1は、基準位置における回転磁界の方向が基準方向に対してなす角度を検出するものである。回転磁界は、第1の位置における第1の部分磁界MF1と第2の位置における第2の部分磁界MF2とを含んでいる。第1の部分磁界MF1と第2の部分磁界MF2は、磁界の方向が互いに180°異なり且つ同じ回転方向に回転する。
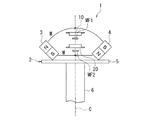
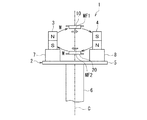
図1および図2に示したように、回転磁界センサ1は、回転磁界を発生する磁界発生部2と、第1の位置において、主成分として第1の部分磁界MF1を含む第1の印加磁界の方向が第1の方向に対してなす第1の角度を検出するための第1の検出部10と、第2の位置において、主成分として第2の部分磁界MF2を含む第2の印加磁界の方向が第2の方向に対してなす第2の角度を検出するための第2の検出部20とを備えている。なお、図1および図2では、便宜上、第1の部分磁界MF1を示す矢印と第1の検出部10とを離れた位置に記載し、第2の部分磁界MF2を示す矢印と第2の検出部20とを離れた位置に記載している。しかし、実際には、第1の検出部10は、第1の部分磁界MF1の発生位置である第1の位置に配置され、第2の検出部20は、第2の部分磁界MF2の発生位置である第2の位置に配置されている。方向と角度の定義については、後で詳しく説明する。
磁界発生部2は、回転位置を検出する対象物である回転軸6の軸方向の一端部に取り付けられた円板部5と、この円板部5に取り付けられた一対の磁石3,4とを備えている。回転軸6は、その中心軸を中心として回転する。それに連動して、磁界発生部2も、回転軸6の中心軸を含む回転中心Cを中心として回転する。一対の磁石3,4は、回転中心Cを含む仮想の平面に対して対称な位置に配置されている。ここで、円板部5に関して、図1および図2における下側の面を「下面」と定義し、図1および図2における上側の面を「上面」と定義する。円板部5の上面および下面は、いずれも回転中心Cに垂直である。磁石3,4は、円板部5の上面に固定されている。円板部5の下面には、回転軸6の一端部が固定されている。磁界発生部2では、回転中心Cを中心として磁石3,4が回転することにより、磁石3,4が発生する磁界に基づいて、回転磁界が発生される。
磁石3,4は、それぞれN極とS極とを有している。磁石3のN極とS極は、円板部5の上面の上に、S極、N極の順に配置されている。磁石4のN極とS極は、円板部5の上面の上に、N極、S極の順に配置されている。一対の磁石3,4が発生する回転磁界の方向は、磁界発生部2が回転することによって、回転中心Cを中心として回転する。図1および図2では、磁石3のN極から磁石4のS極に向かう磁束の主要部分と、磁石4のN極から磁石3のS極に向かう磁束の主要部分を、記号Mを付した曲線で表している。主に磁石3のN極から磁石4のS極に向かう磁束が、第1の位置における第1の部分磁界MF1を発生させる。また、主に磁石4のN極から磁石3のS極に向かう磁束が、第2の位置における第2の部分磁界MF2を発生させる。
第1および第2の検出部10,20は、円板部5の上面の上方において、磁石3と磁石4との間に配置されている。本実施の形態では、特に、第1の検出部10は、回転中心C上における第1の部分磁界MF1の発生位置である第1の位置に配置され、第2の検出部20は、回転中心C上における第2の部分磁界MF2の発生位置である第2の位置に配置されている。なお、図1および図2では、第1の検出部10と第2の検出部20を別体として描いているが、第1の検出部10と第2の検出部20は、それぞれ第1の位置と第2の位置に配置されていれば、一体化されていてもよい。本実施の形態では、第1の部分磁界MF1の方向は、磁石3のN極から磁石4のS極に向かう方向であり、第2の部分磁界MF2の方向は、磁石4のN極から磁石3のS極に向かう方向である。第1の部分磁界MF1の方向と第2の部分磁界MF2の方向は、互いに180°異なっている。磁界発生部2が回転すると、第1の部分磁界MF1と第2の部分磁界MF2は、同じ回転方向に回転する。
ここで、図4を参照して、本実施の形態における方向と角度の定義について説明する。図4において(a)は、第1の位置における方向と角度の定義を示している。図4において(b)は、第2の位置における方向と角度の定義を示している。まず、図1および図2に示した回転中心Cに平行で、円板部5の上面から離れる方向をZ方向と定義する。次に、Z方向に垂直な仮想の平面上において、互いに直交する2つの方向をX方向とY方向と定義する。図4では、X方向を右側に向かう方向として表し、Y方向を上側に向かう方向として表している。また、X方向とは反対の方向を−X方向と定義し、Y方向とは反対の方向を−Y方向と定義する。
第1の位置は、第1の検出部10が第1の印加磁界を検出する位置である。本実施の形態では、第1の位置は、円板部5の上面の上方における回転中心C上の位置である。第1の方向D1は、第1の検出部10が第1の印加磁界の方向DM1を表すときの基準の方向である。本実施の形態では、第1の方向D1はY方向と一致している。第1の印加磁界は、主成分として第1の部分磁界MF1を含んでいる。第1の印加磁界の方向DM1と第1の部分磁界MF1の方向は、図4(a)において時計回り方向に回転するものとする。第1の印加磁界の方向DM1が第1の方向D1に対してなす第1の角度を記号θ1で表し、第1の部分磁界MF1の方向が第1の方向D1に対してなす角度を記号θ1m(図4(a)では図示せず)で表す。第1の印加磁界の成分が第1の部分磁界MF1のみであるときには、θ1はθ1mと一致する。角度θ1,θ1mは、第1の方向D1から時計回り方向に見たときに正の値で表し、第1の方向D1から反時計回り方向に見たときに負の値で表す。
第2の位置は、第2の検出部20が第2の印加磁界を検出する位置である。本実施の形態では、第2の位置は、円板部5の上面の上方における回転中心C上の位置であり、第1の位置よりも円板部5の上面に近い位置である。第2の方向D2は、第2の検出部20が第2の印加磁界の方向DM2を表すときの基準の方向である。本実施の形態では、第1の方向D1と第2の方向D2は、互いに180°異なっている。また、本実施の形態では、第2の方向D2は−Y方向と一致している。第2の印加磁界は、主成分として第2の部分磁界MF2を含んでいる。第2の印加磁界の方向DM2と第2の部分磁界MF2の方向は、図4(b)において時計回り方向に回転するものとする。第2の印加磁界の方向が第2の方向D2に対してなす第2の角度を記号θ2で表し、第2の部分磁界MF2の方向が第2の方向D2に対してなす角度を記号θ2m(図4(b)では図示せず)で表す。第2の印加磁界の成分が第2の部分磁界MF2のみであるときには、θ2はθ2mと一致する。角度θ2,θ2mは、第2の方向D2から時計回り方向に見たときに正の値で表し、第2の方向D2から反時計回り方向に見たときに負の値で表す。本実施の形態では、第1の方向D1と第2の方向D2は互いに180°異なり、第1の部分磁界MF1の方向と第2の部分磁界MF2の方向も互いに180°異なっていることから、角度θ1mと角度θ2mは等しくなる。
基準位置と基準方向は、それぞれ、第1の位置と第1の方向D1と一致していてもよいし、第2の位置と第2の方向D2と一致していてもよいし、これらの位置および方向と異なる任意の位置と方向であってもよい。
次に、図3を参照して、回転磁界センサ1の構成について詳しく説明する。図3は、回転磁界センサ1の構成を示す回路図である。回転磁界センサ1は、前述のように、第1の検出部10と第2の検出部20とを備えている。第1の検出部10は、第1および第2の検出回路11,12と、第1の演算回路13とを有している。第1および第2の検出回路11,12は、それぞれ第1の印加磁界の一方向の成分の強度を検出して、その強度を表す信号を出力する。第1の演算回路13は、第1および第2の検出回路11,12の出力信号に基づいて第1の角度θ1の検出値である第1の角度検出値θ1sを算出する。
第2の検出部20の構成は、基本的には、第1の検出部10と同様である。すなわち、第2の検出部20は、第3および第4の検出回路21,22と、第2の演算回路23とを有している。第3および第4の検出回路21,22は、それぞれ第2の印加磁界の一方向の成分の強度を検出して、その強度を表す信号を出力する。第2の演算回路23は、第3および第4の検出回路21,22の出力信号に基づいて第2の角度θ2の検出値である第2の角度検出値θ2sを算出する。
第1ないし第4の検出回路11,12,21,22の出力信号は、周期が互いに等しい。以下の説明では、第1ないし第4の検出回路11,12,21,22の出力信号の周期を周期Tと記す。第2の検出回路12の出力信号の位相は、第1の検出回路11の出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっている。第4の検出回路22の出力信号の位相は、第3の検出回路21の出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっている。
本実施の形態では、第1の部分磁界MF1の方向と第2の部分磁界MF2の方向が互いに180°異なり、第1の方向D1と第2の方向D2も互いに180°異なっていることから、第1の角度検出値θ1sと第2の角度検出値θ2sの位相は等しくなる。
回転磁界センサ1は、更に、第1の検出部10によって得られた第1の角度検出値θ1sと第2の検出部20によって得られた第2の角度検出値θ2sとに基づいて、基準位置における回転磁界の方向が基準方向に対してなす角度と対応関係を有する検出値θsを算出する第3の演算回路30を備えている。本実施の形態では、第3の演算回路30は、下記の式(1)によって、θsを算出する。
θs=(θ1s+θ2s)/2 …(1)
第1ないし第4の検出回路11,12,21,22は、少なくとも1つの磁気検出素子を含んでいる。第1ないし第4の検出回路11,12,21,22は、それぞれ、少なくとも1つの磁気検出素子として、直列に接続された一対の磁気検出素子を含んでいてもよい。この場合、第1ないし第4の検出回路11,12,21,22は、それぞれ、直列に接続された第1の対の磁気検出素子と、直列に接続された第2の対の磁気検出素子とを含むホイートストンブリッジ回路を有していてもよい。以下、第1ないし第4の検出回路11,12,21,22が、それぞれ上記ホイートストンブリッジ回路を有している場合の例について説明する。
第1の検出回路11は、ホイートストンブリッジ回路14と、差分検出器15とを有している。ホイートストンブリッジ回路14は、電源ポートV1と、グランドポートG1と、2つの出力ポートE11,E12と、直列に接続された第1の対の磁気検出素子R11,R12と、直列に接続された第2の対の磁気検出素子R13,R14とを含んでいる。磁気検出素子R11,R13の各一端は、電源ポートV1に接続されている。磁気検出素子R11の他端は、磁気検出素子R12の一端と出力ポートE11に接続されている。磁気検出素子R13の他端は、磁気検出素子R14の一端と出力ポートE12に接続されている。磁気検出素子R12,R14の各他端は、グランドポートG1に接続されている。電源ポートV1には、所定の大きさの電源電圧が印加される。グランドポートG1はグランドに接続される。差分検出器15は、出力ポートE11,E12の電位差に対応する信号を第1の演算回路13に出力する。
第2の検出回路12は、ホイートストンブリッジ回路16と、差分検出器17とを有している。ホイートストンブリッジ回路16は、電源ポートV2と、グランドポートG2と、2つの出力ポートE21,E22と、直列に接続された第1の対の磁気検出素子R21,R22と、直列に接続された第2の対の磁気検出素子R23,R24とを含んでいる。磁気検出素子R21,R23の各一端は、電源ポートV2に接続されている。磁気検出素子R21の他端は、磁気検出素子R22の一端と出力ポートE21に接続されている。磁気検出素子R23の他端は、磁気検出素子R24の一端と出力ポートE22に接続されている。磁気検出素子R22,R24の各他端は、グランドポートG2に接続されている。電源ポートV2には、所定の大きさの電源電圧が印加される。グランドポートG2はグランドに接続される。差分検出器17は、出力ポートE21,E22の電位差に対応する信号を第1の演算回路13に出力する。
第3の検出回路21は、ホイートストンブリッジ回路24と、差分検出器25とを有している。ホイートストンブリッジ回路24は、電源ポートV3と、グランドポートG3と、2つの出力ポートE31,E32と、直列に接続された第1の対の磁気検出素子R31,R32と、直列に接続された第2の対の磁気検出素子R33,R34とを含んでいる。磁気検出素子R31,R33の各一端は、電源ポートV3に接続されている。磁気検出素子R31の他端は、磁気検出素子R32の一端と出力ポートE31に接続されている。磁気検出素子R33の他端は、磁気検出素子R34の一端と出力ポートE32に接続されている。磁気検出素子R32,R34の各他端は、グランドポートG3に接続されている。電源ポートV3には、所定の大きさの電源電圧が印加される。グランドポートG3はグランドに接続される。差分検出器25は、出力ポートE31,E32の電位差に対応する信号を第2の演算回路23に出力する。
第4の検出回路22は、ホイートストンブリッジ回路26と、差分検出器27とを有している。ホイートストンブリッジ回路26は、電源ポートV4と、グランドポートG4と、2つの出力ポートE41,E42と、直列に接続された第1の対の磁気検出素子R41,R42と、直列に接続された第2の対の磁気検出素子R43,R44とを含んでいる。磁気検出素子R41,R43の各一端は、電源ポートV4に接続されている。磁気検出素子R41の他端は、磁気検出素子R42の一端と出力ポートE41に接続されている。磁気検出素子R43の他端は、磁気検出素子R44の一端と出力ポートE42に接続されている。磁気検出素子R42,R44の各他端は、グランドポートG4に接続されている。電源ポートV4には、所定の大きさの電源電圧が印加される。グランドポートG4はグランドに接続される。差分検出器27は、出力ポートE41,E42の電位差に対応する信号を第2の演算回路23に出力する。
本実施の形態では、ホイートストンブリッジ回路(以下、ブリッジ回路と記す。)14,16,24,26に含まれる全ての磁気検出素子として、MR素子、特にTMR素子を用いている。なお、TMR素子の代りにGMR素子を用いてもよい。TMR素子またはGMR素子は、磁化方向が固定された磁化固定層と、印加される磁界の方向に応じて磁化の方向が変化する自由層と、磁化固定層と自由層の間に配置された非磁性層とを有している。TMR素子では、非磁性層はトンネルバリア層である。GMR素子では、非磁性層は非磁性導電層である。TMR素子またはGMR素子では、自由層の磁化の方向が磁化固定層の磁化の方向に対してなす角度に応じて抵抗値が変化し、この角度が0°のときに抵抗値は最小値となり、角度が180°のときに抵抗値は最大値となる。以下の説明では、ブリッジ回路14,16,24,26に含まれる磁気検出素子をMR素子と記す。図3において、塗りつぶした矢印は、MR素子における磁化固定層の磁化の方向を表し、白抜きの矢印は、MR素子における自由層の磁化の方向を表している。
第1の検出回路11では、MR素子R11,R14における磁化固定層の磁化の方向はX方向であり、MR素子R12,R13における磁化固定層の磁化の方向は−X方向である。この場合、第1の印加磁界のX方向の成分の強度に応じて、出力ポートE11,E12の電位差が変化する。従って、第1の検出回路11は、第1の印加磁界のX方向の成分の強度を検出して、その強度を表す信号を出力する。図4(a)に示した第1の角度θ1が0°のときと180°のときは、第1の印加磁界のX方向の成分の強度は0である。第1の角度θ1が0°よりも大きく180゜よりも小さいときは、第1の印加磁界のX方向の成分の強度は正の値である。第1の角度θ1が180°よりも大きく360゜よりも小さいときは、第1の印加磁界のX方向の成分の強度は負の値である。
第2の検出回路12では、MR素子R21,R24における磁化固定層の磁化の方向はY方向であり、MR素子R22,R23における磁化固定層の磁化の方向は−Y方向である。この場合、第1の印加磁界のY方向の成分の強度に応じて、出力ポートE21,E22の電位差が変化する。従って、第2の検出回路12は、第1の印加磁界のY方向の成分の強度を検出して、その強度を表す信号を出力する。図4(a)に示した第1の角度θ1が90°のときと270°のときは、第1の印加磁界のY方向の成分の強度は0である。第1の角度θ1が0°以上90゜未満のとき、および270°より大きく360°以下のときは、第1の印加磁界のY方向の成分の強度は正の値である。第1の角度θ1が90°よりも大きく270゜よりも小さいときは、第1の印加磁界のY方向の成分の強度は負の値である。
図3に示した例では、第2の検出回路12におけるMR素子の磁化固定層の磁化方向は、第1の検出回路11におけるMR素子の磁化固定層の磁化方向に直交している。理想的には、第1の検出回路11の出力信号の波形はサイン(Sine)波形になり、第2の検出回路12の出力信号の波形はコサイン(Cosine)波形になる。この場合、第2の検出回路12の出力信号の位相は、第1の検出回路11の出力信号の位相に対して、周期Tの1/4だけ異なっている。ここで、第1の検出回路11の出力信号をsinθ1sと表し、第2の検出回路12の出力信号をcosθ1sと表すと、第1の角度検出値θ1sは、下記の式(2)によって算出することができる。なお、“atan”は、アークタンジェントを表す。
θ1s=atan(sinθ1s/cosθ1s) …(2)
なお、360°の範囲内で、式(2)におけるθ1sの解には、180°異なる2つの値がある。しかし、sinθ1sとcosθ1sの正負の組み合わせにより、θ1sの真の値が、式(2)におけるθ1sの2つの解のいずれであるかを判別することができる。すなわち、sinθ1sが正の値のときは、θ1sは0°よりも大きく180゜よりも小さい。sinθ1sが負の値のときは、θ1sは180°よりも大きく360゜よりも小さい。cosθ1sが正の値のときは、θ1sは、0°以上90゜未満、および270°より大きく360°以下の範囲内である。cosθ1sが負の値のときは、θ1sは、90°よりも大きく270゜よりも小さい。第1の演算回路13は、式(2)と、上記のsinθ1sとcosθ1sの正負の組み合わせの判定により、360°の範囲内でθ1sを求める。なお、第2の検出回路12の出力信号の位相が、第1の検出回路11の出力信号の位相に対して、周期Tの1/4だけ異なる場合に限らず、第2の検出回路12の出力信号の位相が、第1の検出回路11の出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっていれば、θ1sを求めることができる。
第3の検出回路21では、MR素子R31,R34における磁化固定層の磁化の方向は−X方向であり、MR素子R32,R33における磁化固定層の磁化の方向はX方向である。この場合、第2の印加磁界の−X方向の成分の強度に応じて、出力ポートE31,E32の電位差が変化する。従って、第3の検出回路21は、第2の印加磁界の−X方向の成分の強度を検出して、その強度を表す信号を出力する。図4(b)に示した第2の角度θ2が0°のときと180°のときは、第2の印加磁界の−X方向の成分の強度は0である。第2の角度θ2が0°よりも大きく180゜よりも小さいときは、第2の印加磁界の−X方向の成分の強度は正の値である。第2の角度θ2が180°よりも大きく360゜よりも小さいときは、第2の印加磁界の−X方向の成分の強度は負の値である。
第4の検出回路22では、MR素子R41,R44における磁化固定層の磁化の方向は−Y方向であり、MR素子R42,R43における磁化固定層の磁化の方向はY方向である。この場合、第2の印加磁界の−Y方向の成分の強度に応じて、出力ポートE41,E42の電位差が変化する。従って、第4の検出回路22は、第2の印加磁界の−Y方向の成分の強度を検出して、その強度を表す信号を出力する。図4(b)に示した第2の角度θ2が90°のときと270°のときは、第2の印加磁界の−Y方向の成分の強度は0である。第2の角度θ2が0°以上90゜未満のとき、および270°より大きく360°以下のときは、第2の印加磁界の−Y方向の成分の強度は正の値である。第2の角度θ2が90°よりも大きく270゜よりも小さいときは、第2の印加磁界の−Y方向の成分の強度は負の値である。
図3に示した例では、第4の検出回路22におけるMR素子の磁化固定層の磁化方向は、第3の検出回路21におけるMR素子の磁化固定層の磁化方向に直交している。理想的には、第3の検出回路21の出力信号の波形はサイン(Sine)波形になり、第4の検出回路22の出力信号の波形はコサイン(Cosine)波形になる。この場合、第4の検出回路22の出力信号の位相は、第3の検出回路21の出力信号の位相に対して、周期Tの1/4だけ異なっている。ここで、第3の検出回路21の出力信号をsinθ2sと表し、第4の検出回路22の出力信号をcosθ2sと表すと、第2の角度検出値θ2sは、下記の式(3)によって算出することができる。
θ2s=atan(sinθ2s/cosθ2s) …(3)
第2の演算回路23は、前述のθ1sの求め方と同様に、式(3)と、sinθ2sとcosθ2sの正負の組み合わせの判定により、360°の範囲内でθ2sを求める。なお、第4の検出回路22の出力信号の位相が、第3の検出回路21の出力信号の位相に対して、周期Tの1/4だけ異なる場合に限らず、第4の検出回路22の出力信号の位相が、第3の検出回路21の出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっていれば、θ2sを求めることができる。
第1ないし第3の演算回路13,23,30は、例えば、1つのマイクロコンピュータによって実現することができる。
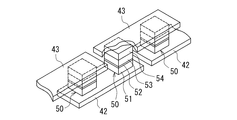
次に、図6を参照して、MR素子の構成の一例について説明する。図6は、図3に示した回転磁界センサ1における1つのMR素子の一部を示す斜視図である。この例では、1つのMR素子は、複数の下部電極と、複数のMR膜と、複数の上部電極とを有している。複数の下部電極42は図示しない基板上に配置されている。個々の下部電極42は細長い形状を有している。下部電極42の長手方向に隣接する2つの下部電極42の間には、間隙が形成されている。図6に示したように、下部電極42の上面上において、長手方向の両端の近傍に、それぞれMR膜50が配置されている。MR膜50は、下部電極42側から順に積層された自由層51、非磁性層52、磁化固定層53および反強磁性層54を含んでいる。自由層51は、下部電極42に電気的に接続されている。反強磁性層54は、反強磁性材料よりなり、磁化固定層53との間で交換結合を生じさせて、磁化固定層53の磁化の方向を固定する。複数の上部電極43は、複数のMR膜50の上に配置されている。個々の上部電極43は細長い形状を有し、下部電極42の長手方向に隣接する2つの下部電極42上に配置されて隣接する2つのMR膜50の反強磁性層54同士を電気的に接続する。このような構成により、図6に示したMR素子は、複数の下部電極42と複数の上部電極43とによって直列に接続された複数のMR膜50を有している。なお、MR膜50における層51〜54の配置は、図6に示した配置とは上下が反対でもよい。
次に、図3ないし図5を参照して、回転磁界センサ1の作用および効果について説明する。回転磁界センサ1では、第1の検出部10によって、第1および第2の検出回路11,12の出力信号に基づいて第1の角度θ1の検出値である第1の角度検出値θ1sを求める。また、第2の検出部20によって、第3および第4の検出回路21,22の出力信号に基づいて第2の角度θ2の検出値である第2の角度検出値θ2sを求める。そして、第1の角度検出値θ1sと第2の角度検出値θ2sとに基づいて、第3の演算回路30によって、基準位置における回転磁界の方向が基準方向に対してなす角度と対応関係を有する検出値θsを算出する。
本実施の形態によれば、回転磁界センサ1に対して外部から、回転磁界以外のノイズ磁界が印加された場合であっても、ノイズ磁界に起因した検出値θsの誤差を低減することが可能になる。以下、これについて詳しく説明する。なお、以下の説明では、上記のノイズ磁界をノイズ磁界Hextと記す。図4において記号Hextを付した矢印は、ノイズ磁界Hextの一例を示している。
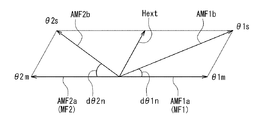
まず、図5を参照して、第1および第2の印加磁界とノイズ磁界Hextとの関係について説明する。図5は、第1および第2の印加磁界とノイズ磁界Hextとの関係を模式的に示す説明図である。ノイズ磁界Hextがない場合には、第1の印加磁界の成分は第1の部分磁界MF1のみであり、第2の印加磁界の成分は第2の部分磁界MF2のみである。図5において、記号AMF1aを付した矢印は、この場合における第1の印加磁界を表し、記号AMF2aを付した矢印は、この場合における第2の印加磁界を表している。図5に示したように、第1の印加磁界AMF1aの方向と第2の印加磁界AMF2aの方向は、第1の部分磁界MF1の方向と第2の部分磁界MF2の方向と同様に、互いに180°異なっている。
ノイズ磁界Hextが印加された場合には、第1の印加磁界は、第1の部分磁界MF1とノイズ磁界Hextとの合成磁界となり、第2の印加磁界は、第2の部分磁界MF2とノイズ磁界Hextとの合成磁界となる。図5において、記号AMF1bを付した矢印は、この場合における第1の印加磁界を表し、記号AMF2bを付した矢印は、この場合における第2の印加磁界を表している。
次に、第1および第2の角度検出値θ1s,θ2sとノイズ磁界Hextとの関係について説明する。ノイズ磁界Hextがない場合には、第1の角度検出値θ1sは、第1の印加磁界AMF1a、すなわち第1の部分磁界MF1の方向が第1の方向D1に対してなす角度θ1mと等しくなる。ノイズ磁界Hextが印加された場合には、第1の角度検出値θ1sは、第1の印加磁界AMF1b、すなわち第1の部分磁界MF1とノイズ磁界Hextとの合成磁界が第1の方向D1に対してなす角度と等しくなる。この合成磁界が第1の方向D1に対してなす角度と角度θ1mとの差は、ノイズ磁界Hextに起因して生じるものであり、角度検出値θ1sの誤差となるものである。本実施の形態では、この誤差を第1のノイズ誤差と呼び、記号dθ1nで表す。図5には、dθ1nも示している。
同様に、ノイズ磁界Hextがない場合には、第2の角度検出値θ2sは、第2の印加磁界AMF2a、すなわち第2の部分磁界MF2の方向が第2の方向D2に対してなす角度θ2mと等しくなる。ノイズ磁界Hextが印加された場合には、第2の角度検出値θ2sは、第2の印加磁界AMF2b、すなわち第2の部分磁界MF2とノイズ磁界Hextとの合成磁界が第2の方向D2に対してなす角度と等しくなる。この合成磁界が第2の方向D2に対してなす角度と角度θ2mとの差は、ノイズ磁界Hextに起因して生じるものであり、角度検出値θ2sの誤差となるものである。本実施の形態では、この誤差を第2のノイズ誤差と呼び、記号dθ2nで表す。図5には、dθ2nも示している。
なお、第1のノイズ誤差dθ1nは、第1の部分磁界MF1から時計回り方向に見たときに正の値で表し、第1の部分磁界MF1から反時計回り方向に見たときに負の値で表すものとする。また、第2のノイズ誤差dθ2nは、第1のノイズ誤差dθ1nと同様に、第2の部分磁界MF2から時計回り方向に見たときに正の値で表し、第2の部分磁界MF2から反時計回り方向に見たときに負の値で表すものとする。
図5に示した例では、第1の印加磁界AMF1bの方向は、第1の部分磁界MF1の方向に対して、図5における反時計回り方向に第1のノイズ誤差dθ1nの絶対値|dθ1n|だけ異なっている。また、第2の印加磁界AMF2bの方向は、第2の部分磁界MF2の方向に対して、図5における時計回り方向に第2のノイズ誤差dθ2nの絶対値|dθ2n|だけ異なっている。この場合、第1の角度検出値θ1sと第2の角度検出値θ2sは、それぞれ下記の式(4),(5)で表される。
θ1s=θ1m−|dθ1n| …(4)
θ2s=θ2m+|dθ2n| …(5)
次に、検出値θsとノイズ磁界Hextとの関係について説明する。前述のように、第3の演算回路30は、第1の角度検出値θ1sと第2の角度検出値θ2sとに基づいて、式(1)によって、検出値θsを算出する。式(1)に、式(4),(5)を代入すると、下記の式(6)が得られる。
θs=(θ1s+θ2s)/2
=(θ1m−|dθ1n|+θ2m+|dθ2n|)/2
=(θ1m+θ2m)/2+(−|dθ1n|+|dθ2n|)/2 …(6)
前述のように、角度θ1mと角度θ2mは等しくなる。ここで、回転磁界センサ1によって検出される、基準位置における回転磁界の方向が基準方向に対してなす角度を角度θと記す。角度θが角度θ1mと等しいと仮定すると、ノイズ磁界Hextが印加されない場合には、検出値θsは、理想的には、角度θと等しくなる。しかし、式(6)から理解されるように、検出値θsは、第1のノイズ誤差dθ1nと第2のノイズ誤差dθ2nの両方と対応関係を有する誤差を含んでいる。この誤差は、ノイズ磁界Hextに起因して生じるものである。
次に、本実施の形態によれば、ノイズ磁界Hextに起因した検出値θsの誤差を低減することが可能になる理由について説明する。図5に示した例では、第1のノイズ誤差dθ1nは負の値(−|dθ1n|)になり、第2のノイズ誤差dθ2nは正の値(|dθ2n|)になる。従って、式(6)によって検出値θsを算出する際に、第1のノイズ誤差dθ1nの値と第2のノイズ誤差dθ2nの値が相殺されて検出値θsの誤差の絶対値は、第1のノイズ誤差dθ1nの絶対値と第2のノイズ誤差dθ2nの絶対値のいずれよりも小さくなる。
なお、ノイズ磁界Hextの方向が図5に示した例とは反対方向である場合には、第1の印加磁界AMF1bの方向は、第1の部分磁界MF1の方向に対して、図5における時計回り方向に第1のノイズ誤差dθ1nの絶対値|dθ1n|だけ異なり、第2の印加磁界AMF2bの方向は、第2の部分磁界MF2の方向に対して、図5における反時計回り方向に第2のノイズ誤差dθ2nの絶対値|dθ2n|だけ異なる。すなわち、この場合には、第1のノイズ誤差dθ1nは正の値(|dθ1n|)になり、第2のノイズ誤差dθ2nは負の値(−|dθ2n|)になる。この場合にも、検出値θsを算出する際に、第1のノイズ誤差dθ1nの値と第2のノイズ誤差dθ2nの値が相殺されて検出値θsの誤差の絶対値は、第1のノイズ誤差dθ1nの絶対値と第2のノイズ誤差dθ2nの絶対値のいずれよりも小さくなる。
もし、回転磁界センサが、第1の検出部10と第2の検出部20の一方のみを備え、第1の角度検出値θ1sと第2の角度検出値θ2sの一方を検出値θsとする場合には、検出値θsに含まれる誤差は、第1のノイズ誤差dθ1nまたは第2のノイズ誤差dθ2nとなる。これに対し、本実施の形態に係る回転磁界センサは、第1の検出部10と第2の検出部20を備え、式(6)によって検出値θsを算出する。本実施の形態では、上記の例に限らず、第1のノイズ誤差dθ1nと第2のノイズ誤差dθ2nが共に0になる場合を除いて、第1のノイズ誤差dθ1nと第2のノイズ誤差dθ2nは、正負の符号が反対の値になる。そのため、上述のように、第3の演算回路30によって検出値θsを算出する際に、検出値θsに含まれる誤差の絶対値は、第1のノイズ誤差dθ1nの絶対値と第2のノイズ誤差dθ2nの絶対値のいずれよりも小さくなる。これにより、本実施の形態によれば、ノイズ磁界Hextに起因した検出角度の誤差を低減することが可能になる。
また、本実施の形態では、第1および第2の検出回路11,12を有する第1の検出部10は第1の位置に配置され、第3および第4の検出回路21,22を有する第2の検出部20は第2の位置に配置されている。そのため、本実施の形態によれば、第1ないし第4の検出回路11,12,21,22を互いに異なる場所に設置する場合に比べて、第1ないし第4の検出回路11,12,21,22の設置箇所を少なくすることができる。また、第1ないし第4の検出回路11,12,21,22は、それぞれ、少なくとも1つのMR素子を含んでいる。本実施の形態によれば、上述のように、第1ないし第4の検出回路11,12,21,22の設置箇所を少なくすることができるので、検出回路11,12,21,22に含まれるMR素子の設置箇所を少なくすることができる。以上のことから、本実施の形態によれば、磁気検出素子(MR素子)の設置箇所を少なくしながら、ノイズ磁界Hextに起因した検出角度の誤差を低減することが可能になる。
[変形例]
以下、本実施の形態における第1および第2の変形例について説明する。始めに、図7を参照して、本実施の形態における第1の変形例の回転磁界センサ1について説明する。図7は、第1の変形例の回転磁界センサ1の概略の構成を示す側面図である。第1の変形例では、一対の磁石3,4は、円板部5の上面から離れるに従って互いの距離が大きくなるように、回転中心Cに対して傾いている。磁石3のN極とS極は、回転中心Cに対して傾き、且つ円板部5の上面から離れる方向に、S極、N極の順に配置されている。磁石4のN極とS極は、回転中心Cに対して傾き、且つ円板部5の上面から離れる方向に、N極、S極の順に配置されている。
図7では、磁石3のN極から磁石4のS極に向かう磁束の主要部分と、磁石4のN極から磁石3のS極に向かう磁束の主要部分を、記号Mを付した曲線または直線で表している。これらの磁束の主要部分は、一対の磁石3,4が回転中心Cに対して傾いていない場合(図2)に比べて、図7における上方に変位している。図2に示したように、一対の磁石3,4が回転中心Cに対して傾いていない場合には、磁石4のN極から磁石3のS極に向かう磁束の主要部分が、円板部5の上面よりも下方を通過する可能性がある。この場合には、第2の検出部20を最適な位置、すなわち磁石4のN極から磁石3のS極に向かう磁束の主要部分が通過する位置に設置することが困難になる場合がある。これに対し、第1の変形例によれば、磁石4のN極から磁石3のS極に向かう磁束の主要部分が、円板部5の上面よりも上方を通過するように、磁束の分布を調整することが可能になる。これにより、容易に、第2の検出部20を最適な位置に設置することが可能になる。
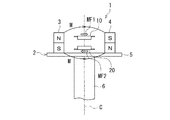
次に、図8を参照して、本実施の形態における第2の変形例の回転磁界センサ1について説明する。図8は、第2の変形例の回転磁界センサ1の概略の構成を示す側面図である。第2の変形例では、一対の磁石3,4は、円板部5の上面から離れた位置に配置されている。磁界発生部2は、図1および図2に示した本実施の形態における磁界発生部2の構成要素に加えて、円板部5の上面に固定された支持部7,8を有している。磁石3,4は、それぞれ支持部7,8の上に固定されている。
図8では、回転磁界のうち、磁石3のN極から磁石4のS極に向かう磁束の主要部分と、磁石4のN極から磁石3のS極に向かう磁束の主要部分を、記号Mを付した曲線で表している。これらの磁束の主要部分は、磁石3,4が円板部5の上面に固定されている場合(図2)に比べて、図8における上方に変位している。これにより、第2の変形例によれば、第1の変形例と同様に、容易に、第2の検出部20を最適な位置に設置することが可能になる。
[第2の実施の形態]
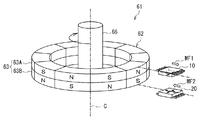
次に、図9および図10を参照して、本発明の第2の実施の形態に係る回転磁界センサについて説明する。図9は、本実施の形態に係る回転磁界センサの概略の構成を示す斜視図である。図10は、本実施の形態に係る回転磁界センサの概略の構成を示す側面図である。図9および図10に示したように、本実施の形態に係る回転磁界センサ61は、第1の実施の形態における磁界発生部2の代りに、磁界発生部62を備えている。
磁界発生部62は、回転位置を検出する対象物である回転軸66に取り付けられたリング状の磁石63を有している。図9および図10において、記号Cを付した一点鎖線は、回転軸66の中心軸を含む回転中心を示している。磁石63は、回転中心Cを中心として対称に配置されるように、図示しない固定手段によって回転軸66に固定されている。磁石63は、回転軸66に連動して、回転中心Cを中心として回転する。これにより、磁石63が発生する磁界に基づいて、回転磁界が発生される。
磁石63は、それぞれ、1組以上のN極とS極が交互にリング状に配列された第1層63Aおよび第2層63Bを有している。第1層63Aおよび第2層63Bは、図9および図10における上下方向(回転中心Cに平行な方向)に積層されている。第1層63AのN極と第2層63BのS極は、上下に隣接するように配置されている。第1層63AのS極と第2層63BのN極も、上下に隣接するように配置されている。
図9および図10に示したように、第1および第2の検出部10,20は、磁石63の外周部の外側の位置において、回転中心Cに平行な方向に並ぶように配置されている。第1の検出部10が配置された位置が第1の位置であり、第2の検出部20が配置された位置が第2の位置である。第1の位置は、第1層63Aと第2層63Bの界面を含む仮想の平面よりも上方にある。第2の位置は、上記仮想の平面よりも下方にある。回転磁界は、第1の位置における第1の部分磁界MF1と第2の位置における第2の部分磁界MF2とを含んでいる。主に第1層63Aの近傍における磁束が第1の部分磁界MF1を発生させる。第1層63Aの近傍における磁束には、上下に隣接する第1層63Aと第2層63Bにおける異なる2つの極の間の磁束と、第1層63Aにおいて回転方向に隣接する異なる2つの極の間の磁束とが含まれる。また、主に第2層63Bの近傍における磁束が第2の部分磁界MF2を発生させる。第2層63Bの近傍における磁束には、上下に隣接する第1層63Aと第2層63Bにおける異なる2つの極の間の磁束と、第2層63Bにおいて回転方向に隣接する異なる2つの極の間の磁束とが含まれる。図10では、第1層63AのN極から第2層63BのS極に向かう磁束の主要部分を、記号Mを付した曲線で表している。第1の部分磁界MF1と第2の部分磁界MF2は、磁界の方向が互いに180°異なり且つ同じ回転方向に回転する。
第1の検出部10は、第1の位置において、主成分として第1の部分磁界MF1を含む第1の印加磁界の方向が第1の方向D1に対してなす第1の角度を検出する。第2の検出部20は、第2の位置において、主成分として第2の部分磁界MF2を含む第2の印加磁界の方向が第2の方向D2に対してなす第2の角度を検出する。第1の方向D1と第2の方向D2は、互いに180°異なっている。第1の方向D1は、例えば、回転中心Cから第1の検出部10に向かう方向である。
図9に示した例では、第1層63Aおよび第2層63Bは、それぞれ、5組のN極とS極とを含み、磁石63が1回転する間に、第1の部分磁界MF1と第2の部分磁界MF2は5回転する。この場合、検出回路11,12,21,22の出力信号における1周期すなわち電気角の360°は、磁石63の1/5回転すなわち磁石63の回転角の72°に相当する。
[変形例]
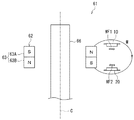
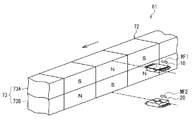
次に、図11を参照して、本実施の形態における変形例について説明する。図11は、本実施の形態における変形例の回転磁界センサ61の概略の構成を示す側面図である。図11に示したように、変形例の回転磁界センサ61は、磁界発生部62の代りに、磁界発生部72を備えている。
磁界発生部72は、一方向に長い磁石73を有している。磁石73は、対象物の直線的な運動に連動して、その長手方向に直線的に移動する。これにより、磁石73が発生する磁界に基づいて、回転磁界が発生される。磁石73は、それぞれ、複数組のN極とS極が交互に直線状に配列された第1層73Aおよび第2層73Bを有している。第1層73Aおよび第2層73Bは、図11における上下方向(磁石73の移動方向に直交する方向)に積層されている。第1層73AのN極と第2層73BのS極は、上下に隣接するように配置されている。第1層73AのS極と第2層73BのN極も、上下に隣接するように配置されている。
図11に示したように、第1および第2の検出部10,20は、磁石73の側方において、図11における上下方向(第1層73Aと第2層73Bの積層方向)に並ぶように配置されている。第1の検出部10が配置された位置が第1の位置であり、第2の検出部20が配置された位置が第2の位置である。第1の位置は、第1層73Aと第2層73Bの界面を含む仮想の平面よりも上方にある。第2の位置は、上記仮想の平面よりも下方にある。回転磁界は、第1の位置における第1の部分磁界MF1と第2の位置における第2の部分磁界MF2とを含んでいる。主に第1層73Aの近傍における磁束が第1の部分磁界MF1を発生させる。第1層73Aの近傍における磁束には、上下に隣接する第1層73Aと第2層73Bにおける異なる2つの極の間の磁束と、第1層73Aにおいて磁石73の移動方向に隣接する異なる2つの極の間の磁束とが含まれる。また、主に第2層73Bの近傍における磁束が第2の部分磁界MF2を発生させる。第2層73Bの近傍における磁束には、上下に隣接する第1層73Aと第2層73Bにおける異なる2つの極の間の磁束と、第2層73Bにおいて磁石73の移動方向に隣接する異なる2つの極の間の磁束とが含まれる。第1の部分磁界MF1と第2の部分磁界MF2は、磁界の方向が互いに180°異なり且つ同じ回転方向に回転する。
第1の検出部10は、第1の位置において、主成分として第1の部分磁界MF1を含む第1の印加磁界の方向が第1の方向D1に対してなす第1の角度を検出する。第2の検出部20は、第2の位置において、主成分として第2の部分磁界MF2を含む第2の印加磁界の方向が第2の方向D2に対してなす第2の角度を検出する。第1の方向D1と第2の方向D2は、互いに180°異なっている。第1の方向D1は、例えば、第1の検出部10に向いた磁石73の側面に垂直であって、磁石73から第1の検出部10に向かう方向である。
磁石73が、1ピッチ分すなわちN極とS極の1組分だけ移動すると、第1の部分磁界MF1と第2の部分磁界MF2がそれぞれ1回転する。この場合、検出回路11,12,21,22の出力信号における1周期すなわち電気角の360°は、磁石73の1ピッチに相当する。
本実施の形態におけるその他の構成、作用および効果は、第1の実施の形態と同様である。
[第3の実施の形態]
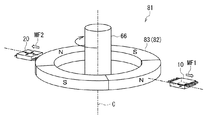
次に、図12を参照して、本発明の第3の実施の形態に係る回転磁界センサについて説明する。図12は、本実施の形態に係る回転磁界センサの概略の構成を示す斜視図である。図12に示したように、本実施の形態に係る回転磁界センサ81は、第2の実施の形態における磁界発生部62の代りに、磁界発生部82を備えている。
磁界発生部82は、回転位置を検出する対象物である回転軸66に取り付けられたリング状の磁石83を有している。図12において、記号Cを付した一点鎖線は、回転軸66の中心軸を含む回転中心を示している。磁石83は、回転中心Cを中心として対称に配置されるように、図示しない固定手段によって回転軸66に固定されている。磁石83は、回転軸66に連動して、回転中心Cを中心として回転する。これにより、磁石83が発生する磁界に基づいて、回転磁界が発生される。磁石83は、2n組(nは1以上の整数)のN極とS極が交互にリング状に配列されて構成されている。図12に示した例では、磁石83は、2組のN極とS極を含んでいる。
図12に示したように、第1および第2の検出部10,20は、磁石83を挟むように、回転中心Cを含む仮想の平面に対して対称な位置に配置されている。第1の検出部10が配置された位置が第1の位置であり、第2の検出部20が配置された位置が第2の位置である。回転磁界は、第1の位置における第1の部分磁界MF1と第2の位置における第2の部分磁界MF2とを含んでいる。第1の部分磁界MF1と第2の部分磁界MF2は、磁界の方向が互いに180°異なり且つ同じ回転方向に回転する。
第1の検出部10は、第1の位置において、主成分として第1の部分磁界MF1を含む第1の印加磁界の方向が第1の方向D1に対してなす第1の角度を検出する。第2の検出部20は、第2の位置において、主成分として第2の部分磁界MF2を含む第2の印加磁界の方向が第2の方向D2に対してなす第2の角度を検出する。第1の方向D1と第2の方向D2は、互いに180°異なっている。第1の方向D1は、例えば、回転中心Cから第1の検出部10に向かう方向である。
図12に示した例では、磁石83が1回転する間に、第1の部分磁界MF1と第2の部分磁界MF2は2回転する。この場合、検出回路11,12,21,22の出力信号における1周期すなわち電気角の360°は、磁石83の1/2回転すなわち磁石83の回転角の180°に相当する。
[変形例]
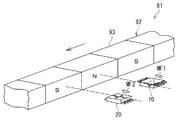
次に、図13を参照して、本実施の形態における変形例について説明する。図13は、本実施の形態における変形例の回転磁界センサ81の概略の構成を示す側面図である。図13に示したように、変形例の回転磁界センサ81は、磁界発生部82の代りに、磁界発生部92を備えている。
磁界発生部92は、一方向に長い磁石93を有している。磁石93は、対象物の直線的な運動に連動して、その長手方向に直線的に移動する。これにより、磁石93が発生する磁界に基づいて、回転磁界が発生される。磁石93は、複数組のN極とS極が交互に直線状に配列されて構成されている。
図13に示したように、第1および第2の検出部10,20は、磁石93の側方において、磁石93の移動方向に平行な方向に並ぶように配置されている。第2の検出部20は、第1の検出部10に対して、磁石93の1/2ピッチだけずれた位置に配置されている。第1の検出部10が配置された位置が第1の位置であり、第2の検出部20が配置された位置が第2の位置である。回転磁界は、第1の位置における第1の部分磁界MF1と第2の位置における第2の部分磁界MF2とを含んでいる。第1の部分磁界MF1と第2の部分磁界MF2は、磁界の方向が互いに180°異なり且つ同じ回転方向に回転する。
第1の検出部10は、第1の位置において、主成分として第1の部分磁界MF1を含む第1の印加磁界の方向が第1の方向D1に対してなす第1の角度を検出する。第2の検出部20は、第2の位置において、主成分として第2の部分磁界MF2を含む第2の印加磁界の方向が第2の方向D2に対してなす第2の角度を検出する。第1の方向D1と第2の方向D2は、互いに180°異なっている。第1の方向D1は、例えば、第1の検出部10に向いた磁石93の側面に垂直であって、磁石93から第1の検出部10に向かう方向である。
磁石93が、1ピッチ分だけ移動すると、第1の部分磁界MF1と第2の部分磁界MF2がそれぞれ1回転する。この場合、検出回路11,12,21,22の出力信号における1周期すなわち電気角の360°は、磁石93の1ピッチに相当する。
本実施の形態におけるその他の構成、作用および効果は、第2の実施の形態と同様である。
[第4の実施の形態]
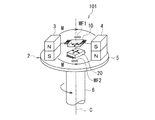
次に、図14を参照して、本発明の第4の実施の形態に係る回転磁界センサについて説明する。図14は、本実施の形態に係る回転磁界センサの概略の構成を示す斜視図である。本実施の形態に係る回転磁界センサ101の構成は、基本的には、第1の実施の形態に係る回転磁界センサ1と同じである。
本実施の形態では、第1の検出部10が第1の印加磁界の方向を表すときの基準の方向である第1の方向D1と、第2の検出部20が第2の印加磁界の方向を表すときの基準の方向である第2の方向D2の関係が、第1の実施の形態とは異なっている。具体的には、第1の方向D1と第2の方向D2は、第1および第2の部分磁界MF1,MF2の回転方向について、45°の奇数倍だけ異なっている。これを実現するために、図14に示した例では、第2の検出部20の姿勢を第1の実施の形態と異ならせている。図14に示した例では、第2の検出部20は、第1の実施の形態における図1に示した状態から、回転中心Cに垂直な仮想の平面内において、磁界発生部2の回転方向に45°回転した姿勢で配置されている。第1の検出部10の姿勢は、第1の実施の形態における図1に示した状態と同じである。この場合、第1の方向D1と第2の方向D2は、第1および第2の部分磁界MF1,MF2の回転方向について、180°+45°、すなわち225°(45°の5倍)だけ異なる。なお、第2の検出部20の姿勢を上記のように設定する代りに、第2の検出部20に含まれるMR素子における磁化固定層の磁化の方向を、第1の実施の形態における方向に対して、磁界発生部2の回転方向に45°回転してもよい。あるいは、第1の検出部10を、図1に示した状態から、回転中心Cに垂直な仮想の平面内において、磁界発生部2の回転方向に−45°回転した姿勢で配置してもよい。あるいは、第1の検出部10に含まれるMR素子における磁化固定層の磁化の方向を、第1の実施の形態における方向に対して、磁界発生部2の回転方向に−45°回転してもよい。
本実施の形態では、第1の印加磁界の方向が第1の方向D1に対してなす第1の角度θ1の検出値である第1の角度検出値θ1sの位相と、第2の印加磁界の方向が第1の方向D2に対してなす第2の角度θ2の検出値である第2の角度検出値θ2sの位相は、π/4(電気角45°)の奇数倍だけ異なっている。図14に示した例では、第1の部分磁界MF1の方向と第2の部分磁界MF2の方向は180°異なり、第1の方向D1と第2の方向D2は第1および第2の部分磁界MF1,MF2の回転方向について225°異なっていることから、第1の角度検出値θ1sと第2の角度検出値θ2sの位相は、π/4(電気角45°)だけ異なる。この場合、第3の演算回路30は、下記の式(7)によって、基準位置における回転磁界の方向が基準方向に対してなす角度と対応関係を有する検出値θsを算出する。
θs=(θ1s+θ2s+π/4)/2 …(7)
次に、回転磁界センサ101の作用および効果について説明する。回転磁界センサ101では、第1の検出部10の第1および第2の検出回路11,12の出力信号に基づいて算出された第1の角度検出値θ1sと、第2の検出部20の第3および第4の検出回路21,22の出力信号に基づいて算出された第2の角度検出値θ2sとに基づいて、第3の演算回路30によって、式(7)を用いて、基準位置における回転磁界の方向が基準方向に対してなす角度θと対応関係を有する検出値θsを算出する。
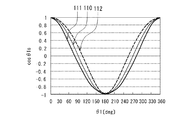
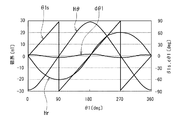
第1の実施の形態で説明したように、検出回路11,12,21,22の各出力信号の波形は、理想的には正弦曲線(サイン(Sine)波形とコサイン(Cosine)波形を含む)となる。しかし、実際には、MR素子に起因してMR素子の出力信号波形が歪むことによって、検出回路11,12,21,22の各出力信号の波形は、正弦曲線から歪む。MR素子に起因してMR素子の出力信号波形が歪む場合としては、例えば、MR素子の磁化固定層の磁化方向が回転磁界等の影響によって変動する場合や、MR素子の自由層の磁化方向が、自由層の形状異方性や保磁力等の影響によって、第1の印加磁界の方向または第2の印加磁界の方向と一致しない場合がある。図15は、検出回路の出力信号の波形の歪みの態様を示している。図15には、検出回路11,12,21,22を代表して、検出回路12の出力信号の波形を示している。図15において、横軸は角度θ1を示し、縦軸は検出回路12の出力信号cosθ1sを示している。符号110は、理想的な正弦曲線を示している。符号111,112で示す2つの波形は、MR素子に起因して歪んだ波形を示している。
上述のようにMR素子に起因して検出回路11,12の出力信号の波形が歪むために、第1の角度検出値θ1sは、第1の印加磁界の成分が第1の部分磁界MF1のみであって、第1の部分磁界MF1の方向が理想的に回転する場合に想定される第1の角度θ1の理論値に対する第1の角度誤差を含んでいる。同様に、MR素子に起因して検出回路21,22の出力信号の波形が歪むために、第2の角度検出値θ2sは、第2の印加磁界の成分が第2の部分磁界MF2のみであって、第2の部分磁界MF2の方向が理想的に回転する場合に想定される第2の角度θ2の理論値に対する第2の角度誤差を含んでいる。本実施の形態では、第1の角度誤差を記号dθ1で表し、第2の角度誤差を記号dθ2で表す。第1の角度誤差dθ1と第2の角度誤差dθ2は、第1および第2の部分磁界MF1,MF2の方向の変化に伴って互いに等しい誤差周期で周期的に変化し、且つ第1の角度誤差dθ1の変化は第1の角度検出値θ1sの変化に依存し、第2の角度誤差dθ2の変化は第2の角度検出値θ2sの変化に依存している。検出回路の出力信号の波形が図15に示したように歪む場合には、誤差周期は、各検出回路の出力信号の周期の1/4、すなわちπ/2(電気角90°)となる。
図16は、第1の角度検出値θ1sと第1の角度誤差dθ1との関係を示している。図16において、横軸は第1の角度θ1を示し、縦軸は第1の角度θ1、第1の角度検出値θ1sおよび第1の角度誤差dθ1を示している。また、図16では、便宜上、縦軸における角度θ1と第1の角度検出値θ1sの値については、実際の角度が90°〜270゜の範囲では180°を引いた値で表し、実際の角度が270°〜360゜の範囲では360°を引いた値で表している。これ以降の説明で使用する図16と同様の図においても、図16と同様の表し方を用いる。第2の角度検出値θ2sと第2の角度誤差dθ2との関係は、図16と同様である。なお、理解を容易にするために、図16における第1の角度検出値θ1sの波形は、角度誤差dθ1成分を強調して描いている。これは、図16と同様の他の図でも同様である。
本実施の形態では、第1の角度検出値θ1sの位相と第2の角度検出値θ2sの位相は、誤差周期の1/2すなわちπ/4(電気角45°)の奇数倍だけ異なっている。これを実現するために、本実施の形態では、第1の方向D1と第2の方向D2を、第1および第2の部分磁界MF1,MF2の回転方向について、誤差周期の1/2(電気角45°)の奇数倍だけ異ならせている。例えば、第1の方向D1と第2の方向D2が、第1および第2の部分磁界MF1,MF2の回転方向について、誤差周期の1/2(電気角45°)の5倍に相当する空間上の角度である225°だけ異なっている場合には、第1の角度検出値θ1sの位相と第2の角度検出値θ2sの位相は、誤差周期の1/2すなわちπ/4(電気角45°)だけ異なる。
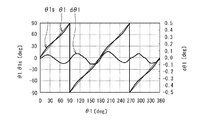
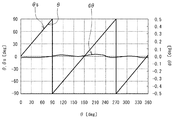
本実施の形態によれば、第1の角度誤差dθ1と第2の角度誤差dθ2とを相殺することが可能になる。このことを、図17および図18を参照して説明する。図17において、(a)は、図16に示した第1の角度検出値θ1sと第1の角度誤差dθ1との関係を示している。図17において、(b)は、第2の角度検出値θ2sと第2の角度誤差dθ2との関係を示している。図17に示した例では、第1の角度誤差dθ1および第2の角度誤差dθ2の振幅は±0.09°である。本実施の形態では、第1の角度検出値θ1sと第2の角度検出値θ2sの位相を、誤差周期の1/2すなわちπ/4の奇数倍だけずらしている。そして、第1の角度検出値θ1sと第2の角度検出値θ2sを用いて、角度θの検出値θsを算出する。従って、検出値θsを算出する際に、第1の角度誤差dθ1の位相と第2の角度誤差dθ2の位相は、互いに逆相になる。これにより、第1の角度誤差dθ1と第2の角度誤差dθ2が相殺される。
図18は、上述のようにして算出された検出値θsと、この検出値θsに含まれる角度誤差との関係を表している。本実施の形態では、検出値θsに含まれる角度誤差を記号dθで表す。図18に示されるように、角度誤差dθは、第1の角度誤差dθ1および第2の角度誤差dθ2に比べて、大幅に小さくなっている。図18に示した例では、角度誤差dθの振幅は±0.02°である。
また、本実施の形態では、MR素子における磁化固定層の磁化の方向以外は全く同じ構成の2つの検出部10,20を用いて検出角度を補正している。そのため、各検出部における角度誤差が温度の関数であったとしても、温度による角度誤差の変動分も含めて各検出部における角度誤差を相殺して、検出角度を補正することができる。そのため、本実施の形態によれば、最終的に、温度による誤差の変動の少ない角度検出値を得ることが可能になる。
また、本実施の形態では、検出値θsの算出方法は、第1の角度検出値θ1sと第2の角度検出値θ2sの位相差を補正する点を除いて、第1の実施の形態における検出値θsの算出方法と同じである。従って、第1の実施の形態で説明したように、回転磁界センサ101に対して外部から、回転磁界以外のノイズ磁界Hextが印加された場合に、ノイズ磁界Hextに起因して生じる第1の角度検出値θ1sの第1のノイズ誤差dθ1nと、ノイズ磁界Hextに起因して生じる第2の角度検出値θ2sの第2のノイズ誤差dθ2nは、正負の符号が反対の値になる。そのため、本実施の形態によれば、第1の実施の形態における説明と同じ理由によって、ノイズ磁界Hextに起因した検出値θsの誤差を低減することが可能になる。
本実施の形態におけるその他の構成、作用および効果は、第1の実施の形態と同様である。なお、本実施の形態において、磁界発生部2を第2または第3の実施の形態における構成とし、第1の方向D1と第2の方向D2が第1および第2の部分磁界MF1,MF2の回転方向について45°の奇数倍だけ異なるように、第1および第2の検出部10,20を配置してもよい。
[第5の実施の形態]
次に、図19ないし図21を参照して、本発明の第5の実施の形態に係る回転磁界センサについて説明する。図19は、本実施の形態に係る回転磁界センサの概略の構成を示す斜視図である。図20は、本実施の形態における変形例の回転磁界センサの概略の構成を示す斜視図である。図21は、本実施の形態に係る回転磁界センサの構成を示すブロック図である。始めに、本実施の形態に係る回転磁界センサ121の構成について説明する。図21に示したように、回転磁界センサ121は、第1および第2の複合検出部210A,210Bを備えている。
複合検出部210A,210Bの構成は、それぞれ、第1の実施の形態に係る回転磁界センサ1から磁界発生部2を除いた構成と同様である。具体的には、第1の複合検出部210Aは、第1の検出部10および第2の検出部20および第3の演算回路30と同様の構成の第1の検出部10A、第2の検出部20Aおよび第3の演算回路30Aを備えている。同様に、第2の複合検出部210Bは、第1の検出部10、第2の検出部20および第3の演算回路30と同様の構成の第3の検出部10B、第4の検出部20Bおよび第6の演算回路30Bを備えている。第1の検出部10Aは第1の位置に配置され、第2の検出部20Aは第2の位置に配置され、第3の検出部10Bは第3の位置に配置され、第4の検出部20Bは第4の位置に配置されている。
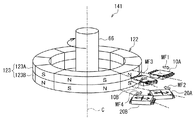
図19に示したように、本実施の形態に係る回転磁界センサ121は、更に、回転磁界を発生する磁界発生部122を備えている。磁界発生部122の構成は、第2の実施の形態における磁界発生部62の構成と同様である。具体的には、磁界発生部122は、回転軸66に取り付けられたリング状の磁石123を有している。また、磁石123は、第1層63Aおよび第2層63Bと同様の構成の第1層123Aおよび第2層123Bを有している。
第1および第2の検出部10A,20Aの、磁石123に対する相対的な位置関係は、第2の実施の形態における第1および第2の検出部10,20の、磁石63に対する相対的な位置関係と同様である。第3および第4の検出部10B,20Bの、磁石123に対する相対的な位置関係も、第2の実施の形態における第1および第2の検出部10,20の、磁石63に対する相対的な位置関係と同様である。第3および第4の検出部10B,20Bは、第1および第2の検出部10A,20Aに対して、回転磁界の回転の周期の1/4すなわち電気角90°に相当する量だけずれた位置に配置されている。
第1の検出部10Aが配置された位置が第1の位置であり、第2の検出部20Aが配置された位置が第2の位置である。回転磁界は、第1の位置における第1の部分磁界MF1と第2の位置における第2の部分磁界MF2とを含んでいる。第1および第2の部分磁界MF1,MF2は、第2の実施の形態と同じ原理により、磁石123によって発生される。第1の部分磁界MF1と第2の部分磁界MF2は、磁界の方向が互いに180°異なり且つ同じ回転方向に回転する。
第1の検出部10Aは、第1の位置において、主成分として第1の部分磁界MF1を含む第1の印加磁界の方向が第1の方向D1に対してなす第1の角度を検出する。第2の検出部20Aは、第2の位置において、主成分として第2の部分磁界MF2を含む第2の印加磁界の方向が第2の方向D2に対してなす第2の角度を検出する。第1の方向D1と第2の方向D2は、互いに180°異なっている。第1の方向D1は、例えば、回転中心Cから第1の検出部10Aに向かう方向である。
また、第3の検出部10Bが配置された位置が第3の位置であり、第4の検出部20Bが配置された位置が第4の位置である。回転磁界は、更に、第3の位置における第3の部分磁界MF3と第4の位置における第4の部分磁界MF4とを含んでいる。第3および第4の部分磁界MF3,MF4は、第1および第2の部分磁界MF1,MF2と同じ原理により、磁石123によって発生される。第3の部分磁界MF3と第4の部分磁界MF4は、磁界の方向が互いに180°異なり且つ第1および第2の部分磁界MF1,MF2と同じ回転方向に回転する。
第3の検出部10Bは、第3の位置において、主成分として第3の部分磁界MF3を含む第3の印加磁界の方向が第3の方向に対してなす第3の角度を検出する。第4の検出部20Bは、第4の位置において、主成分として第4の部分磁界MF4を含む第4の印加磁界の方向が第4の方向に対してなす第4の角度を検出する。第3の方向は、第3の検出部10Bが第3の印加磁界の方向を表すときの基準の方向である。第4の方向は、第4の検出部20Bが第4の印加磁界の方向を表すときの基準の方向である。第3および第4の方向、ならびに第3および第4の角度の定義は、図4を用いて説明した第1および第2の方向、ならびに第1および第2の角度と同様である。本実施の形態では、第3の方向と第4の方向は、互いに180°異なっている。第3の方向は、例えば、回転中心Cから第3の検出部10Bに向かう方向である。
本実施の形態では、第3の方向に対して第3の部分磁界MF3の方向がなす角度は、第1の方向に対して第1の部分磁界MF1の方向がなす角度に対して、電気角90°に相当する角度だけ異なっている。同様に、第4の方向に対して第4の部分磁界MF4の方向がなす角度は、第2の方向に対して第2の部分磁界MF2の方向がなす角度に対して、電気角90°に相当する角度だけ異なっている。
第1の検出部10Aは、第1の検出回路11Aと、第2の検出回路12Aと、第1の演算回路13Aとを有している。第1の検出回路11A、第2の検出回路12Aおよび第1の演算回路13Aの構成は、第1の実施の形態における第1の検出回路11、第2の検出回路12および第1の演算回路13と同じである。第1および第2の検出回路11A,12Aは、それぞれ第1の印加磁界の一方向の成分の強度を検出して、その強度を表す信号を出力する。第1の演算回路13Aは、第1および第2の検出回路11A,12Aの出力信号に基づいて第1の角度θ1の検出値である第1の角度検出値θ1sを算出する。
第2の検出部20Aは、第3の検出回路21Aと、第4の検出回路22Aと、第2の演算回路23Aとを有している。第3の検出回路21A、第4の検出回路22Aおよび第2の演算回路23Aの構成は、第1の実施の形態における第3の検出回路21、第4の検出回路22および第2の演算回路23と同じである。第3および第4の検出回路21A,22Aは、それぞれ第2の印加磁界の一方向の成分の強度を検出して、その強度を表す信号を出力する。第2の演算回路23Aは、第3および第4の検出回路21A,22Aの出力信号に基づいて第2の角度θ2の検出値である第2の角度検出値θ2sを算出する。
第3の検出部10Bは、第5の検出回路11Bと、第6の検出回路12Bと、第4の演算回路13Bとを有している。第5の検出回路11B、第6の検出回路12Bおよび第4の演算回路13Bの構成は、第1の実施の形態における第1の検出回路11、第2の検出回路12および第1の演算回路13と同じである。第5および第6の検出回路11B,12Bは、それぞれ第3の印加磁界の一方向の成分の強度を検出して、その強度を表す信号を出力する。第4の演算回路13Bは、第5および第6の検出回路11B,12Bの出力信号に基づいて第3の角度θ3の検出値である第3の角度検出値θ3sを算出する。
第4の検出部20Bは、第7の検出回路21Bと、第8の検出回路22Bと、第5の演算回路23Bとを有している。第7の検出回路21B、第8の検出回路22Bおよび第5の演算回路23Bの構成は、第1の実施の形態における第3の検出回路21、第4の検出回路22および第2の演算回路23と同じである。第7および第8の検出回路21B,22Bは、それぞれ第4の印加磁界の一方向の成分の強度を検出して、その強度を表す信号を出力する。第5の演算回路23Bは、第7および第8の検出回路21B,22Bの出力信号に基づいて第4の角度θ4の検出値である第4の角度検出値θ4sを算出する。
第1ないし第8の検出回路11A,12A,21A,22A,11B,12B,21B,22Bの出力信号は、周期が互いに等しい。以下の説明では、第1ないし第8の検出回路11A,12A,21A,22A,11B,12B,21B,22Bの出力信号の周期を周期Tと記す。第2の検出回路12Aの出力信号の位相は、第1の検出回路11Aの出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっている。第4の検出回路22Aの出力信号の位相は、第3の検出回路21Aの出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっている。第6の検出回路12Bの出力信号の位相は、第5の検出回路11Bの出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっている。第8の検出回路22Bの出力信号の位相は、第7の検出回路21Bの出力信号の位相に対して、周期Tの1/4の奇数倍だけ異なっている。
第3の演算回路30Aは、第1の検出部10Aによって第1の印加磁界を検出して得られた第1の角度検出値θ1sと、第2の検出部20Aによって第2の印加磁界を検出して得られた第2の角度検出値θ2sとに基づいて、第1の基準位置における回転磁界の方向が第1の基準方向に対してなす角度の検出値θAsを算出する。検出値θAsの算出方法は、第1の実施の形態における検出値θsの算出方法と同じである。検出値θAsは、誤差を考慮しなければ、基準位置における回転磁界の方向が基準方向に対してなす角度との差が一定値(0を含む)になるという関係を有している。従って、検出値θAsは、基準位置における回転磁界の方向が基準方向に対してなす角度と対応関係を有する。
第6の演算回路30Bは、第3の検出部10Bによって第3の印加磁界を検出して得られた第3の角度検出値θ3sと、第4の検出部20Bによって第4の印加磁界を検出して得られた第4の角度検出値θ4sとに基づいて、第2の基準位置における回転磁界の方向が第2の基準方向に対してなす角度の検出値θBsを算出する。検出値θBsの算出方法は、第1の実施の形態における検出値θsの算出方法と同じである。検出値θBsは、誤差を考慮しなければ、基準位置における回転磁界の方向が基準方向に対してなす角度との差が一定値(0を含む)になるという関係を有している。従って、検出値θBsは、基準位置における回転磁界の方向が基準方向に対してなす角度と対応関係を有する。
図21に示したように、回転磁界センサ121は、更に、第3の演算回路30Aによって算出された角度の検出値θAsと、第6の演算回路30Bによって算出された角度の検出値θBsとに基づいて、基準位置における回転磁界の方向が基準方向に対してなす角度の検出値θsを算出する第7の演算回路211を備えている。第7の演算回路211は、例えばマイクロコンピュータによって実現することができる。なお、回転磁界センサ121の基準位置と基準方向は、それぞれ、第1の基準位置と第1の基準方向と一致していてもよいし、第2の基準位置と第2の基準方向と一致していてもよいし、これらの位置および方向と異なる任意の位置と方向であってもよい。
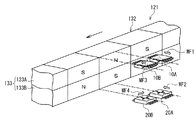
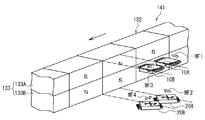
次に、本実施の形態における変形例の回転磁界センサ121の構成について説明する。図20に示したように、本実施の形態における変形例の回転磁界センサ121は、磁界発生部122の代りに、磁界発生部132を備えている。磁界発生部132の構成は、第2の実施の形態における磁界発生部72の構成と同様である。具体的には、磁界発生部132は、磁石73と同様の構成の磁石133を有している。磁石133は、対象物の直線的な運動に連動して、その長手方向に直線的に移動する。これにより、磁石133が発生する磁界に基づいて、回転磁界が発生される。磁石133は、第1層73Aおよび第2層73Bと同様の構成の第1層133Aおよび第2層133Bを有している。
第1および第2の検出部10A,20Aの、磁石133に対する相対的な位置関係は、第2の実施の形態における第1および第2の検出部10,20の、磁石73に対する相対的な位置関係と同様である。第3および第4の検出部10B,20Bの、磁石133に対する相対的な位置関係も、第2の実施の形態における第1および第2の検出部10,20の、磁石73に対する相対的な位置関係と同様である。変形例では、第3および第4の検出部10B,20Bは、第1および第2の検出部10A,20Aに対して、回転磁界の回転の周期の1/4すなわち電気角90°に相当する量、すなわち磁石133の1/4ピッチだけずれた位置に配置されている。
次に、第7の演算回路211における検出値θsの算出方法について説明する。本実施の形態では、第1の印加磁界を検出して得られた第1の角度検出値θ1sと第2の印加磁界を検出して得られた第2の角度検出値θ2sとに基づいて、検出値θAsを算出する。また、第3の印加磁界を検出して得られた第3の角度検出値θ3sと第4の印加磁界を検出して得られた第4の角度検出値θ4sとに基づいて、検出値θBsを算出する。図19および図20に示した例では、第3の位置と第4の位置は、それぞれ、第1の位置と第2の位置に対して、電気角90°に相当する量だけずれており、検出値θAs,θBsの位相は、電気角90°だけ異なる。これらの例では、第7の演算回路211は、下記の式(8)によって、θsを算出する。
θs=(θAs+θBs+π/2)/2 …(8)
次に、回転磁界センサ121の効果について説明する。本実施の形態に係る回転磁界センサ121は、回転磁界に起因して発生する角度誤差を低減するのに適している。始めに、図19、図20および図22を参照して、回転磁界に起因して角度誤差が発生する理由について説明する。図示しないが、図19に示した例では、第1の部分磁界MF1は、磁石123の半径方向の成分Hrと、回転中心Cに垂直な平面内において、Hrに直交する方向の成分Hθとを含んでいる。図示しないが、図20に示した例では、第1の部分磁界MF1は、第1の検出部10Aと第2の検出部20Aが並べられた方向に垂直な仮想の平面内において、磁石133の移動方向に直交する方向の成分Hrと、この平面内において、Hrに直交する方向の成分Hθとを含んでいる。
ここで、図19または図20に示した例において、第1の印加磁界の成分が第1の部分磁界MF1のみであって、第1の検出部10Aによって第1の印加磁界の方向を検出して第1の角度検出値θ1sを得る場合を考える。図22は、この場合におけるHr、Hθ、θ1sならびに第1の角度誤差の関係の一例を示している。本実施の形態では、第1の角度誤差を記号dθ1で表す。図22において、横軸は、角度θ1を示し、縦軸は、Hr、Hθ、θ1s、dθ1を示している。なお、理解を容易にするために、図22における第1の角度誤差dθ1の波形は、振幅を実際よりも大きく描いている。図19または図20に示した例では、第1の部分磁界MF1の方向や第1の部分磁界MF1の一方向の成分の強度が正弦関数的に変化しない場合がある。この場合、第1の角度検出値θ1sは、第1の印加磁界の成分が第1の部分磁界MF1のみであって、第1の部分磁界MF1の方向が理想的に回転する場合に想定される第1の角度θ1の理論値に対する第1の角度誤差dθ1を含むことになる。この場合における第1の角度誤差dθ1の変化は、第1の部分磁界MF1の方向の変化に依存する。第1の角度誤差dθ1の誤差周期は、第1の部分磁界MF1の方向の回転の周期の1/2である。
同様に、第2の検出部20Aによって第2の印加磁界の方向を検出して第2の角度検出値θ2sを得る場合も、第2の角度検出値θ2sは、第2の印加磁界の成分が第2の部分磁界MF2のみであって、第2の部分磁界MF2の方向が理想的に回転する場合に想定される第2の角度θ2の理論値に対する第2の角度誤差を含むことになる。本実施の形態では、第2の角度誤差を記号dθ2で表す。この場合における第2の角度誤差dθ2の変化は、第2の部分磁界MF2の方向の変化に依存する。第2の角度誤差dθ2の誤差周期は、第2の部分磁界MF2の方向の回転の周期の1/2である。
また、第3の検出部10Bによって第3の印加磁界の方向を検出して第3の角度検出値θ3sを得る場合も、第3の角度検出値θ3sは、第3の印加磁界の成分が第3の部分磁界MF3のみであって、第3の部分磁界MF3の方向が理想的に回転する場合に想定される第3の角度θ3の理論値に対する第3の角度誤差を含むことになる。本実施の形態では、第3の角度誤差を記号dθ3で表す。この場合における第3の角度誤差dθ3の変化は、第3の部分磁界MF3の方向の変化に依存する。第3の角度誤差dθ3の誤差周期は、第3の部分磁界MF3の方向の回転の周期の1/2である。
また、第4の検出部20Bによって第4の印加磁界の方向を検出して第4の角度検出値θ4sを得る場合も、第4の角度検出値θ4sは、第4の印加磁界の成分が第4の部分磁界MF4のみであって、第4の部分磁界MF4の方向が理想的に回転する場合に想定される第4の角度θ4の理論値に対する第4の角度誤差を含むことになる。本実施の形態では、第4の角度誤差を記号dθ4で表す。この場合における第4の角度誤差dθ4の変化は、第4の部分磁界MF4の方向の変化に依存する。第4の角度誤差dθ4の誤差周期は、第4の部分磁界MF4の方向の回転の周期の1/2である。
前述のように、第1の部分磁界MF1と第2の部分磁界MF2は、磁界の方向が互いに180°異なり且つ同じ回転方向に回転するものであり、第3の部分磁界MF3と第4の部分磁界MF4は、磁界の方向が互いに180°異なり且つ第1および第2の部分磁界MF1,MF2と同じ回転方向に回転するものである。従って、第1ないし第4の部分磁界MF1,MF2,MF3,MF4の方向の回転の周期は互いに等しく、第1ないし第4の角度誤差dθ1,dθ2,dθ3,dθ4は、第1ないし第4の部分磁界MF1,MF2,MF3,MF4の方向の変化に伴って互いに等しい誤差周期で周期的に変化する。
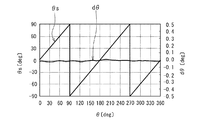
次に、図23および図24を参照して、回転磁界センサ121によって、回転磁界に起因して発生する角度誤差を低減できることを説明する。図23において、(a)は、検出値θAsと、検出値θAsに含まれる角度誤差dθAとの関係を示している。図23において、(b)は、検出値θBsと、検出値θBsに含まれる角度誤差dθBとの関係を示している。図23では、第1の基準位置における回転磁界の方向が第1の基準方向に対してなす角度を記号θAで表し、第2の基準位置における回転磁界の方向が第2の基準方向に対してなす角度を記号θBで表している。前述のように、検出値θAs,θBsの算出方法は、いずれも第1の実施の形態における検出値θsの算出方法と同じである。例えば、第1の実施の形態で説明したように、第1の方向D1と第2の方向D2が互いに180°異なり、第3の方向D3と第4の方向D4も互いに180°異なっている場合、検出値θAs,θBsは、いずれも、第1の実施の形態における式(1)によって算出される。式(1)から理解されるように、検出値θAsは、第1の角度検出値θ1sと第2の角度検出値θ2sの両方と対応関係を有していることから、検出値θAsに含まれる角度誤差dθAも、第1の角度検出値θ1sに含まれる第1の角度誤差dθ1と第2の角度検出値θ2sに含まれる第2の角度誤差dθ2の両方と対応関係を有している。角度誤差dθ1,dθ2,dθAの位相は一致している。同様に、検出値θBsは、第3の角度検出値θ3sと第4の角度検出値θ4sの両方と対応関係を有していることから、検出値θBsに含まれる角度誤差dθBも、第3の角度検出値θ3sに含まれる第3の角度誤差dθ3と第4の角度検出値θ4sに含まれる第4の角度誤差dθ4の両方と対応関係を有している。角度誤差dθ3,dθ4,dθBの位相は一致している。
図23に示した例では、角度誤差dθA,dθBの振幅は±0.17°である。本実施の形態では、第3の位置と第4の位置は、それぞれ、第1の位置と第2の位置に対して、誤差周期の1/2(電気角90°)に相当する量だけずれており、検出値θAs,θBsの位相は、誤差周期の1/2(電気角90°)だけ異なる。従って、検出値θsを算出する際に、角度誤差dθAの位相と角度誤差dθBの位相は、互いに逆相になる。これにより、角度誤差dθAと角度誤差dθBとが相殺される。
図24は、上述のようにして算出された検出値θsと、この検出値θsに含まれる角度誤差との関係を表している。図24では、基準位置における回転磁界の方向が基準方向に対してなす角度を記号θで表し、検出値θsに含まれる角度誤差を記号dθで表している。図24に示されるように、角度誤差dθは、角度誤差dθA,dθBに比べて、大幅に小さくなっている。図24に示した例では、角度誤差dθの振幅は±0.03°である。
なお、本実施の形態では、第3の位置と第4の位置は、それぞれ、第1の位置と第2の位置に対して、誤差周期の1/2に相当する量だけずれている。しかし、第3の位置と第4の位置は、それぞれ、第1の位置と第2の位置に対して、誤差周期の1/2の奇数倍に相当する量だけずれていればよい。この場合に、角度誤差dθAと角度誤差dθBが相殺されて、検出値θsに含まれる角度誤差dθを大幅に低減することができる。
また、本実施の形態では、検出値θAs,θBsの位相差は、電気角90°に限らず任意の大きさでよい。検出値θAs,θBsの位相差をβとすると、第7の演算回路211は、下記の式(9)によって、θsを算出する。
θs=(θAs+θBs+β)/2 …(9)
また、本実施の形態によれば、回転磁界センサ121に対して外部から、回転磁界以外のノイズ磁界Hextが印加された場合であっても、ノイズ磁界Hextに起因した検出値θAs,θAsの誤差を低減することが可能になる。以下、これについて詳しく説明する。ノイズ磁界Hextが印加された場合には、第1の印加磁界は、第1の部分磁界MF1とノイズ磁界Hextとの合成磁界になり、第2の印加磁界は、第2の部分磁界MF2とノイズ磁界Hextとの合成磁界になる。前述のように、第3の演算回路30Aにおける検出値θAsの算出方法は、第1の実施の形態における検出値θsの算出方法と同じである。従って、第1の実施の形態で説明したように、ノイズ磁界Hextに起因して生じる第1の角度検出値θ1sの第1のノイズ誤差と、ノイズ磁界Hextに起因して生じる第2の角度検出値θ2sの第2のノイズ誤差は、正負の符号が反対の値になる。そのため、本実施の形態によれば、第1の実施の形態における説明と同じ理由によって、ノイズ磁界Hextに起因した検出値θAsの誤差を低減することが可能になる。
同様に、ノイズ磁界Hextが印加された場合には、第3の印加磁界は、第3の部分磁界MF3とノイズ磁界Hextとの合成磁界になり、第4の印加磁界は、第4の部分磁界MF4とノイズ磁界Hextとの合成磁界になる。この場合、第1および第2のノイズ誤差と同様に、ノイズ磁界Hextに起因して、第3の角度検出値θ3sには第3のノイズ誤差が生じ、第4の角度検出値θ4sには第4のノイズ誤差が生じる。前述のように、第6の演算回路30Bにおける検出値θBsの算出方法は、第1の実施の形態における検出値θsの算出方法と同じである。従って、第3のノイズ誤差と第4のノイズ誤差は、正負の符号が反対の値になる。そのため、本実施の形態によれば、第1の実施の形態における説明と同じ理由によって、ノイズ磁界Hextに起因した検出値θBsの誤差を低減することが可能になる。
本実施の形態におけるその他の構成、作用および効果は、第1の実施の形態と同様である。
[第6の実施の形態]
次に、本発明の第6の実施の形態に係る回転磁界センサについて説明する。本実施の形態に係る回転磁界センサ141は、回転磁界に起因して発生する角度誤差の成分と、MR素子に起因して発生する角度誤差の成分の両方を低減することを可能にするものである。
始めに、図25を参照して、本実施の形態に係る回転磁界センサ141の構成について説明する。図25は、本実施の形態に係る回転磁界センサ141の概略の構成を示す斜視図である。回転磁界センサ141の構成は、基本的には、図19に示した第5の実施の形態に係る回転磁界センサ121と同じである。本実施の形態では、第1の検出部10Aが第1の印加磁界の方向を表すときの基準の方向である第1の方向D1と、第2の検出部20Aが第2の印加磁界の方向を表すときの基準の方向である第2の方向D2は、第1および第2の部分磁界MF1,MF2の回転方向について、45°の奇数倍だけ異なっている。同様に、第3の検出部10Bが第3の印加磁界の方向を表すときの基準の方向である第3の方向D3と、第4の検出部40が第4の印加磁界の方向を表すときの基準の方向である第4の方向D4は、第3および第4の部分磁界MF3,MF4の回転方向について、45°の奇数倍だけ異なっている。これを実現するために、図25に示した例では、第2および第4の検出部20A,20Bの姿勢を、図19に示した状態と異ならせている。図25に示した例では、第2および第4の検出部20A,20Bは、それぞれ、図19に示した状態から、回転中心Cに垂直な仮想の平面内において、検出部20A,20Bのそれぞれの中心を通り回転中心Cに平行な軸を中心として45°回転した姿勢で配置されている。第1および第3の検出部10A,10Bの姿勢は、図19に示した状態と同じである。
次に、図26を参照して、本実施の形態における変形例の回転磁界センサ141の構成について説明する。図26は、本実施の形態における変形例の回転磁界センサ141の概略の構成を示す斜視図である。変形例の回転磁界センサ141の構成は、基本的には、図20に示した第5の実施の形態における変形例の回転磁界センサ121と同じである。変形例では、第2および第4の検出部20A,20Bの姿勢が、図20に示した状態とは異なっている。具体的には、検出部20A,20Bは、それぞれ、図20に示した状態から、検出部20A,20Bが並べられた仮想の平面内において、検出部20A,20Bのそれぞれの中心を通り上記仮想の平面に垂直な軸を中心として45°回転した姿勢で配置されている。第1および第3の検出部10A,10Bの姿勢は、図20に示した状態と同じである。なお、検出部20A,20Bの姿勢を上記のように設定する代りに、検出部20A,20Bに含まれるMR素子における磁化固定層の磁化の方向を、第5の実施の形態における方向に対して45°回転してもよい。あるいは、検出部10A,10Bを図20に示した状態から、検出部10A,10Bが並べられた仮想の平面内において、検出部10A,10Bのそれぞれの中心を通り上記仮想の平面に垂直な軸を中心として−45°回転した姿勢で配置してもよい。あるいは、検出部10A,10Bに含まれるMR素子における磁化固定層の磁化の方向を、第5の実施の形態における方向に対して−45°回転してもよい。
図25および図26に示した例では、第1の検出部10Aが第1の印加磁界の方向を表すときの基準の方向である第1の方向D1と、第2の検出部20Aが第2の印加磁界の方向を表すときの基準の方向である第2の方向D2は、第1および第2の部分磁界MF1,MF2の回転方向について、45°の奇数倍だけ異なっている。そのため、第4の実施の形態で説明したように、第1の印加磁界の方向が第1の方向D1に対してなす第1の角度θ1の検出値である第1の角度検出値θ1sの位相と、第2の印加磁界の方向が第1の方向D2に対してなす第2の角度θ2の検出値である第2の角度検出値θ2sの位相は、π/4(電気角45°)の奇数倍だけ異なっている。
同様に、第3の検出部10Bが第3の印加磁界の方向を表すときの基準の方向である第3の方向D3と、第4の検出部40が第4の印加磁界の方向を表すときの基準の方向である第4の方向D4は、第3および第4の部分磁界MF3,MF4の回転方向について、45°の奇数倍だけ異なっている。そのため、第4の実施の形態で説明したように、第3の印加磁界の方向が第3の方向D3に対してなす第3の角度θ3の検出値である第3の角度検出値θ3sの位相と、第4の印加磁界の方向が第4の方向D4に対してなす第4の角度θ4の検出値である第4の角度検出値θ4sの位相は、π/4(電気角45°)の奇数倍だけ異なっている。
また、図25および図26に示した例では、第5の実施の形態と同様に、第3の位置と第4の位置は、それぞれ、第1の位置と第2の位置に対して、電気角90°に相当する量だけずれており、検出値θAsの位相と検出値θBsの位相は、電気角90°だけ異なっている。
次に、本実施の形態における、基準位置における回転磁界の方向が基準方向に対してなす角度の検出値θsの算出方法について説明する。本実施の形態における第1の複合検出部210Aでは、第1の検出部10Aによって得られた第1の角度検出値θ1sと、第2の検出部20Aによって得られた第2の角度検出値θ2sとに基づいて、検出値θAsを算出する。本実施の形態における第2の複合検出部210Bでは、第3の検出部10Bによって得られた第3の角度検出値θ3sと、第4の検出部20Bによって得られた第4の角度検出値θ4sとに基づいて、検出値θBsを算出する。検出値θAs,θBsの算出方法は、第4の実施の形態における検出値θsの算出方法と同じである。
本実施の形態における第7の演算回路211は、複合検出部210A,210Bによって得られた検出値θAs,θBsに基づいて、検出値θsを算出する。第7の演算回路211における検出値θsの算出方法は、第5の実施の形態と同じである。
次に、回転磁界センサ141の効果について説明する。始めに、角度誤差が、回転磁界に起因して発生する角度誤差の成分と、MR素子に起因して発生する角度誤差の成分とを含む場合があることについて説明する。図25および図26に示した例では、第5の実施の形態で説明したように、第1ないし第4の角度検出値θ1s,θ2s,θ3s,θ4sは、それぞれ、回転磁界に起因して発生する角度誤差の成分を含む場合がある。また、第4の実施の形態で説明したように、第1ないし第4の角度検出値θ1s,θ2s,θ3s,θ4sは、それぞれ、MR素子に起因して発生する角度誤差の成分を含む場合がある。
従って、第1の角度検出値θ1sにおける第1の角度誤差dθ1、第2の角度検出値θ2sにおける第2の角度誤差dθ2、第3の角度検出値θ3sにおける第3の角度誤差dθ3、および第4の角度検出値θ4sにおける第4の角度誤差dθ4は、それぞれ、回転磁界に起因して発生する第1の誤差成分と、MR素子に起因して発生する第2の誤差成分とを含む場合がある。第1の誤差成分は、回転磁界の方向の変化に依存して、回転磁界の方向の回転の周期の1/2すなわち電気角180°の第1の誤差周期で変化する。第2の誤差成分は、第1ないし第8の検出回路11A,12A,21A,22A,11B,12B,21B,22B(図21参照)の出力信号の周期の1/4すなわち電気角90°の第2の誤差周期で変化する。
本実施の形態では、第1の角度検出値θ1sの位相と第2の角度検出値θ2sの位相を、第2の誤差周期の1/2(電気角45°)の奇数倍だけ異ならせている。また、第3の角度検出値θ3sの位相と第4の角度検出値θ4sの位相を、第2の誤差周期の1/2(電気角45°)の奇数倍だけ異ならせている。本実施の形態では、第4の実施の形態における検出値θsの算出方法と同じ方法によって、検出値θAs,θBsを算出する。そのため、本実施の形態によれば、検出値θAsを算出する際に、第1の角度誤差dθ1中の第2の誤差成分と第2の角度誤差dθ2中の第2の誤差成分とが相殺され、検出値θBsを算出する際に、第3の角度誤差dθ3中の第2の誤差成分と第4の角度誤差dθ4中の第2の誤差成分とが相殺される。
また、第4の実施の形態における検出値θsの算出方法と同じ方法によって、検出値θAs,θBsを算出することから、回転磁界センサ141に対して外部から、回転磁界以外のノイズ磁界Hextが印加された場合であっても、検出値θAs,θBsを算出する際に、ノイズ磁界Hextに起因した検出値θAs,θBsの誤差を低減することが可能になる。
更に、本実施の形態では、第3の位置と第4の位置は、それぞれ、第1の位置と第2の位置に対して、第1の誤差周期の1/2(電気角90°)に相当する量だけずれている。本実施の形態では、第5の実施の形態と同じ方法によって、検出値θsを算出する。そのため、本実施の形態によれば、検出値θsを算出する際に、検出値θAsに含まれる第1および第2の角度誤差dθ1,dθ2中の第1の誤差成分と、検出値θBsに含まれる第3および第4の角度誤差dθ3,dθ4中の第1の誤差成分とが相殺される。なお、第5の実施の形態と同様に、本実施の形態においても、第3の位置と第4の位置は、それぞれ、第1の位置と第2の位置に対して、第1の誤差周期の1/2の奇数倍に相当する量だけずれていればよい。
本実施の形態におけるその他の構成、作用および効果は、第4または第5の実施の形態と同様である。
なお、本発明は、上記各実施の形態に限定されず、種々の変更が可能である。例えば、各実施の形態における複数の検出部の配置は一例であり、複数の検出部の配置は、特許請求の範囲に記載された要件を満たす範囲内で種々の変更が可能である。
第2の位置は、第2の検出部20が第2の印加磁界を検出する位置である。本実施の形態では、第2の位置は、円板部5の上面の上方における回転中心C上の位置であり、第1の位置よりも円板部5の上面に近い位置である。第2の方向D2は、第2の検出部20が第2の印加磁界の方向DM2を表すときの基準の方向である。本実施の形態では、第1の方向D1と第2の方向D2は、互いに180°異なっている。また、本実施の形態では、第2の方向D2は−Y方向と一致している。第2の印加磁界は、主成分として第2の部分磁界MF2を含んでいる。第2の印加磁界の方向DM2と第2の部分磁界MF2の方向は、図4(b)において時計回り方向に回転するものとする。第2の印加磁界の方向DM2が第2の方向D2に対してなす第2の角度を記号θ2で表し、第2の部分磁界MF2の方向が第2の方向D2に対してなす角度を記号θ2m(図4(b)では図示せず)で表す。第2の印加磁界の成分が第2の部分磁界MF2のみであるときには、θ2はθ2mと一致する。角度θ2,θ2mは、第2の方向D2から時計回り方向に見たときに正の値で表し、第2の方向D2から反時計回り方向に見たときに負の値で表す。本実施の形態では、第1の方向D1と第2の方向D2は互いに180°異なり、第1の部分磁界MF1の方向と第2の部分磁界MF2の方向も互いに180°異なっていることから、角度θ1mと角度θ2mは等しくなる。
始めに、図25を参照して、本実施の形態に係る回転磁界センサ141の構成について説明する。図25は、本実施の形態に係る回転磁界センサ141の概略の構成を示す斜視図である。回転磁界センサ141の構成は、基本的には、図19に示した第5の実施の形態に係る回転磁界センサ121と同じである。本実施の形態では、第1の検出部10Aが第1の印加磁界の方向を表すときの基準の方向である第1の方向D1と、第2の検出部20Aが第2の印加磁界の方向を表すときの基準の方向である第2の方向D2は、第1および第2の部分磁界MF1,MF2の回転方向について、45°の奇数倍だけ異なっている。同様に、第3の検出部10Bが第3の印加磁界の方向を表すときの基準の方向である第3の方向D3と、第4の検出部20Bが第4の印加磁界の方向を表すときの基準の方向である第4の方向D4は、第3および第4の部分磁界MF3,MF4の回転方向について、45°の奇数倍だけ異なっている。これを実現するために、図25に示した例では、第2および第4の検出部20A,20Bの姿勢を、図19に示した状態と異ならせている。図25に示した例では、第2および第4の検出部20A,20Bは、それぞれ、図19に示した状態から、回転中心Cに垂直な仮想の平面内において、検出部20A,20Bのそれぞれの中心を通り回転中心Cに平行な軸を中心として45°回転した姿勢で配置されている。第1および第3の検出部10A,10Bの姿勢は、図19に示した状態と同じである。
図25および図26に示した例では、第1の検出部10Aが第1の印加磁界の方向を表すときの基準の方向である第1の方向D1と、第2の検出部20Aが第2の印加磁界の方向を表すときの基準の方向である第2の方向D2は、第1および第2の部分磁界MF1,MF2の回転方向について、45°の奇数倍だけ異なっている。そのため、第4の実施の形態で説明したように、第1の印加磁界の方向が第1の方向D1に対してなす第1の角度θ1の検出値である第1の角度検出値θ1sの位相と、第2の印加磁界の方向が第2の方向D2に対してなす第2の角度θ2の検出値である第2の角度検出値θ2sの位相は、π/4(電気角45°)の奇数倍だけ異なっている。