[第1の実施の形態]
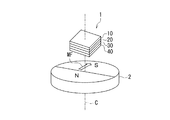
以下、本発明の実施の形態について図面を参照して詳細に説明する。始めに、図1および図2を参照して、本発明の第1の実施の形態に係る回転磁界センサの概略の構成について説明する。図1は、本実施の形態に係る回転磁界センサの概略の構成を示す斜視図である。図2は、本実施の形態における方向と角度の定義を示す説明図である。
図1に示したように、本実施の形態に係る回転磁界センサ1は、基準位置における回転磁界MFの方向が基準方向に対してなす角度を検出するものである。基準位置における回転磁界MFの方向は、回転磁界センサ1から見て回転する。図1には、回転磁界MFを発生する手段の例として、円柱状の磁石2を示している。この磁石2は、円柱の中心軸を含む仮想の平面を中心として対称に配置されたN極とS極とを有している。この磁石2は、円柱の中心軸を中心として回転する。これにより、磁石2が発生する回転磁界MFの方向は、円柱の中心軸を含む回転中心Cを中心として回転する。
基準位置は、磁石2の一方の端面に平行な仮想の平面(以下、基準平面と言う。)内に位置する。この基準平面内において、磁石2が発生する回転磁界MFの方向は、基準位置を中心として回転する。基準方向は、基準平面内に位置して、基準位置と交差する。以下の説明において、基準位置における回転磁界MFの方向とは、基準平面内に位置する方向を指す。回転磁界センサ1は、磁石2の上記一方の端面に対向するように配置される。なお、後で、他の実施の形態で説明するように、回転磁界MFを発生する手段は、図1に示した磁石2に限られるものではない。
ここで、図1および図2を参照して、本実施の形態における方向と角度の定義について説明する。まず、図1に示した回転中心Cに平行で、図1における下から上に向かう方向をZ方向と定義する。図2では、Z方向を図2における奥から手前に向かう方向として表している。次に、Z方向に垂直な2方向であって、互いに直交する2つの方向をX方向とY方向と定義する。図2では、X方向を右側に向かう方向として表し、Y方向を上側に向かう方向として表している。また、X方向とは反対の方向を−X方向と定義し、Y方向とは反対の方向を−Y方向と定義する。
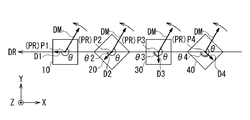
基準位置PRは、回転磁界センサ1が回転磁界MFを検出する位置である。基準方向DRは、−X方向とする。基準位置PRにおける回転磁界MFの方向DMが基準方向DRに対してなす角度を記号θで表す。回転磁界MFの方向DMは、図2において反時計回り方向に回転するものとする。角度θは、基準方向DRから反時計回り方向に見たときに正の値で表し、基準方向DRから時計回り方向に見たときに負の値で表す。回転磁界センサ1は、角度θと対応関係を有する角度検出値θsを出力する。
回転磁界センサ1は、N個の検出回路と演算部とを備えている。N個の検出回路は、それぞれ、少なくとも1つの磁気検出素子を含み、回転磁界MFの方向DMに対応した出力信号を生成する。演算部は、N個の検出回路のN個の出力信号を用いて、角度検出値θsを決定する演算を行う。
演算部では、N個の検出回路の中から選択されたM個の検出回路からなるG個の第1検出回路グループが規定されていると共に、G個の第1検出回路グループの各々の中に、M個の検出回路の中から選択されたm個の検出回路からなるg個の第2検出回路グループが規定されている。Nは、4以上の整数である。以下、これを要件1と言う。Mは、3以上(N−1)以下の整数である。以下、これを要件2と言う。N個の検出回路の各々は、1個以上(G−1)個以下の第1検出回路グループに属する。以下、これを要件3と言う。mは、2以上(M−1)以下の整数である。以下、これを要件4と言う。gは、M/m以上MCm以下の整数である。以下、これを要件5と言う。1つの第1検出回路グループ内で、M個の検出回路の各々は、1個以上(g−1)個以下の第2検出回路グループに属する。以下、これを要件6と言う。要件1〜6の意味については、後で詳しく説明する。
演算部は、角度計算部と角度決定部とを有している。角度計算部は、全ての第2検出回路グループの各々について、m個の検出回路のm個の出力信号に基づいて、角度θと対応関係を有する角度値を算出する。角度決定部は、G個の第1検出回路グループから、当該第1検出回路グループに属するg個の第2検出回路グループに対応するg個の角度値の全てが所定の大きさの角度範囲内に含まれる1つ以上の正常な第1検出回路グループを抽出し、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値のうちの少なくとも1つに基づいて角度検出値θsを決定する。
gは、要件5に加えて、M以上であるという要件を満たしていてもよい。以下、この要件を要件7と言う。また、1つの第1検出回路グループ内で、M個の検出回路の各々は、要件6に加えて、m個以上の第2検出回路グループに属するという要件を満たしていてもよい。以下、この要件を要件8と言う。回転磁界センサ1が要件7,8を満たす場合、演算部は、更に、N個の検出回路のうちの1つが故障した場合に、故障した検出回路を特定する故障検出部を有していてもよい。この故障検出部は、以下のようにして故障した検出回路を特定する。まず、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値が含まれる所定の大きさの範囲を正常角度値範囲とする。次に、G個の第1検出回路グループから、1つ以上の正常な第1検出回路グループ以外の複数の異常な第1検出回路グループを抽出する。次に、複数の異常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値を、正常角度値範囲内の正常角度値と正常角度値範囲外の異常角度値とに分類する。次に、全ての異常角度値に対応する全ての第2検出回路グループには属しているが、全ての正常角度値に対応する全ての第2検出回路グループには属さない検出回路を、故障した検出回路と特定する。要件7,8の意味については、後で詳しく説明する。
本実施の形態では、検出回路の故障には、予め決められた正常値に対する検出回路の出力信号のずれ量が比較的小さい態様の故障も含まれる。このような態様の故障は、例えば、後述する複数のMR膜のうちの1つが短絡したり、MR膜が異方性を持ったりして発生する。本実施の形態に係る回転磁界センサ1は、N個の検出回路のうちの1つが故障しても正しい角度検出値θsを出力することを可能にする。要件7,8を満たす回転磁界センサ1は、更に、故障した検出回路を特定することを可能にする。
次に、本実施の形態に係る角度決定方法の概略について説明する。本実施の形態に係る角度決定方法は、本実施の形態に係る回転磁界センサ1を用いて、角度検出値θsを決定する。すなわち、本実施の形態に係る角度決定方法は、本実施の形態に係る回転磁界センサ1のN個の検出回路のN個の出力信号を用いた演算を行って、回転磁界センサ1が出力する角度検出値θsを決定する。本実施の形態に係る角度決定方法では、予め、N個の検出回路の中から選択されたM個の検出回路からなるG個の第1検出回路グループが規定されていると共に、G個の第1検出回路グループの各々の中に、M個の検出回路の中から選択されたm個の検出回路からなるg個の第2検出回路グループが規定されている。本実施の形態に係る角度決定方法は、前述の要件1〜6を満たしている。
本実施の形態に係る角度決定方法は、第1の手順と第2の手順とを備えている。第1の手順では、全ての第2検出回路グループの各々について、m個の検出回路のm個の出力信号に基づいて、角度θと対応関係を有する角度値を算出する。第2の手順では、G個の第1検出回路グループから、当該第1検出回路グループに属するg個の第2検出回路グループに対応するg個の角度値の全てが所定の大きさの角度範囲内に含まれる1つ以上の正常な第1検出回路グループを抽出し、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値のうちの少なくとも1つに基づいて角度検出値θsを決定する。
本実施の形態に係る角度決定方法は、更に、前述の要件7,8を満たしていてもよい。この場合、本実施の形態に係る角度決定方法は、更に、N個の検出回路のうちの1つが故障した場合に、故障した検出回路を特定する第3の手順を備えていてもよい。この第3の手順では、まず、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値が含まれる所定の大きさの範囲を正常角度値範囲とする。次に、G個の第1検出回路グループから、1つ以上の正常な第1検出回路グループ以外の複数の異常な第1検出回路グループを抽出する。次に、複数の異常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値を、正常角度値範囲内の正常角度値と正常角度値範囲外の異常角度値とに分類する。次に、全ての異常角度値に対応する全ての第2検出回路グループには属しているが、全ての正常角度値に対応する全ての第2検出回路グループには属さない検出回路を、故障した検出回路と特定する。
以下、本実施の形態に係る回転磁界センサ1および角度決定方法についての理解を容易にするために、回転磁界センサ1の実施例と、角度決定方法の実施例について説明する。その後で、本実施の形態に係る回転磁界センサ1および角度決定方法について概念的に説明する。
実施例の回転磁界センサ1は、前述の要件1〜8を満たしている。実施例の回転磁界センサ1では、Nが4、Mが3、Gが4、mが2、gが3である。4個の検出回路の各々は、3個の第1検出回路グループに属している。1つの第1検出回路グループ内で、3個の検出回路の各々は、2個の第2検出回路グループに属している。
図3は、実施例の回転磁界センサ1の検出回路を示す回路図である。図3に示したように、実施例の回転磁界センサ1は、4個の検出回路、すなわち第1の検出回路10、第2の検出回路20、第3の検出回路30および第4の検出回路40を備えている。図1では、理解を容易にするために、第1ないし第4の検出回路10〜40を別体として描いているが、第1ないし第4の検出回路10〜40は一体化されていてもよい。また、図1では、第1ないし第4の検出回路10〜40が回転中心Cに平行な方向に積層されているが、その積層順序は図1に示した例に限られない。
また、第1の検出回路10が配置されている位置を第1の位置P1と呼び、第2の検出回路20が配置されている位置を第2の位置P2と呼び、第3の検出回路30が配置されている位置を第3の位置P3と呼び、第4の検出回路40が配置されている位置を第4の位置P4と呼ぶ。実施例では、第1ないし第4の位置P1〜P4は、回転磁界MFの回転方向について同じ位置であり、基準位置PRと一致している。
第1ないし第4の検出回路10〜40は、それぞれ、少なくとも1つの磁気検出素子を含み、回転磁界MFの方向DMに対応した第1ないし第4の出力信号を生成する。具体的に説明すると、第1の検出回路10は、回転磁界MFの方向DMと第1の方向D1との相対角度に対応した第1の出力信号S1を生成する。第1の出力信号S1は、回転磁界MFの方向DMが第1の方向D1のときに最大になる。第2の検出回路20は、回転磁界MFの方向DMと第2の方向D2との相対角度に対応した第2の出力信号S2を生成する。第2の出力信号S2は、回転磁界MFの方向DMが第2の方向D2のときに最大になる。第3の検出回路30は、回転磁界MFの方向DMと第3の方向D3との相対角度に対応した第3の出力信号S3を生成する。第3の出力信号S3は、回転磁界MFの方向DMが第3の方向D3のときに最大になる。第4の検出回路40は、回転磁界MFの方向DMと第4の方向D4との相対角度に対応した第4の出力信号S4を生成する。第4の出力信号S4は、回転磁界MFの方向DMが第4の方向D4のときに最大になる。
図2に示したように、実施例では、第1の方向D1は、基準方向DR(−X方向)と一致している。第2の方向D2は、第1の方向D1(基準方向DR)から反時計回り方向にθ2だけ回転した方向である。第3の方向D3は、第1の方向D1から反時計回り方向にθ3だけ回転した方向である。第4の方向D4は、第1の方向D1から反時計回り方向にθ4だけ回転した方向である。実施例では特に、θ2、θ3、θ4は、それぞれ、45°、90°、135°である。また、第3の方向D3は、−Y方向と一致している。
第1ないし第4の出力信号S1〜S4は、それぞれ、所定の信号周期Tで周期的に変化し、互いに位相が異なっている。理想的には、第1ないし第4の出力信号S1〜S4の波形は、正弦曲線(サイン(Sine)波形とコサイン(Cosine)波形を含む)となる。第1の出力信号S1と第2の出力信号S2の位相差の絶対値は45°であり、第1の出力信号S1と第3の出力信号S3の位相差の絶対値は90°であり、第1の出力信号S1と第4の出力信号S4の位相差の絶対値は135°である。また、第2の出力信号S2と第3の出力信号S3の位相差の絶対値、第3の出力信号S3と第4の出力信号S4の位相差の絶対値は、いずれも、45°である。なお、磁気検出素子の作製の精度等の観点から、各位相差の絶対値は、それぞれ、上述の値から、わずかにずれていてもよい。
図3に示したように、第1の検出回路10は、ホイートストンブリッジ回路14と、差分検出器15と、電源ポートV1と、グランドポートG1とを有している。ホイートストンブリッジ回路14は、直列に接続された第1の対の磁気検出素子R11,R12と、直列に接続された第2の対の磁気検出素子R13,R14と、2つの出力ポートE11,E12とを含んでいる。磁気検出素子R11,R13の各一端は、電源ポートV1に接続されている。磁気検出素子R11の他端は、磁気検出素子R12の一端と出力ポートE11に接続されている。磁気検出素子R13の他端は、磁気検出素子R14の一端と出力ポートE12に接続されている。磁気検出素子R12,R14の各他端は、グランドポートG1に接続されている。電源ポートV1とグランドポートG1との間には、所定の電圧が印加される。差分検出器15は、出力ポートE11,E12に接続された2つの入力端と、1つの出力端とを有している。差分検出器15は、出力ポートE11,E12の電位差に対応する信号を第1の出力信号S1として出力する。
第2ないし第4の検出回路20〜40の回路構成は、第1の検出回路10と同様である。すなわち、第2の検出回路20は、ホイートストンブリッジ回路24と、差分検出器25と、電源ポートV2と、グランドポートG2とを有している。ホイートストンブリッジ回路24は、直列に接続された第1の対の磁気検出素子R21,R22と、直列に接続された第2の対の磁気検出素子R23,R24と、2つの出力ポートE21,E22とを含んでいる。磁気検出素子R21,R23の各一端は、電源ポートV2に接続されている。磁気検出素子R21の他端は、磁気検出素子R22の一端と出力ポートE21に接続されている。磁気検出素子R23の他端は、磁気検出素子R24の一端と出力ポートE22に接続されている。磁気検出素子R22,R24の各他端は、グランドポートG2に接続されている。電源ポートV2とグランドポートG2との間には、所定の電圧が印加される。差分検出器25は、出力ポートE21,E22に接続された2つの入力端と、1つの出力端とを有している。差分検出器25は、出力ポートE21,E22の電位差に対応する信号を第2の出力信号S2として出力する。
第3の検出回路30は、ホイートストンブリッジ回路34と、差分検出器35と、電源ポートV3と、グランドポートG3とを有している。ホイートストンブリッジ回路34は、直列に接続された第1の対の磁気検出素子R31,R32と、直列に接続された第2の対の磁気検出素子R33,R34と、2つの出力ポートE31,E32とを含んでいる。磁気検出素子R31,R33の各一端は、電源ポートV3に接続されている。磁気検出素子R31の他端は、磁気検出素子R32の一端と出力ポートE31に接続されている。磁気検出素子R33の他端は、磁気検出素子R34の一端と出力ポートE32に接続されている。磁気検出素子R32,R34の各他端は、グランドポートG3に接続されている。電源ポートV3とグランドポートG3との間には、所定の電圧が印加される。差分検出器35は、出力ポートE31,E32に接続された2つの入力端と、1つの出力端とを有している。差分検出器35は、出力ポートE31,E32の電位差に対応する信号を第3の出力信号S3として出力する。
第4の検出回路40は、ホイートストンブリッジ回路44と、差分検出器45と、電源ポートV4と、グランドポートG4とを有している。ホイートストンブリッジ回路44は、直列に接続された第1の対の磁気検出素子R41,R42と、直列に接続された第2の対の磁気検出素子R43,R44と、2つの出力ポートE41,E42とを含んでいる。磁気検出素子R41,R43の各一端は、電源ポートV4に接続されている。磁気検出素子R41の他端は、磁気検出素子R42の一端と出力ポートE41に接続されている。磁気検出素子R43の他端は、磁気検出素子R44の一端と出力ポートE42に接続されている。磁気検出素子R42,R44の各他端は、グランドポートG4に接続されている。電源ポートV4とグランドポートG4との間には、所定の電圧が印加される。差分検出器45は、出力ポートE41,E42に接続された2つの入力端と、1つの出力端とを有している。差分検出器45は、出力ポートE41,E42の電位差に対応する信号を第4の出力信号S4として出力する。
実施例では、ホイートストンブリッジ回路(以下、ブリッジ回路と記す。)14,24,34,44に含まれる全ての磁気検出素子として、磁気抵抗効果素子(MR素子)、特にスピンバルブ型のMR素子を用いている。スピンバルブ型のMR素子は、TMR素子でもよいし、GMR素子でもよい。TMR素子またはGMR素子は、磁化方向が固定された磁化固定層と、回転磁界MFの方向DMに応じて磁化の方向が変化する磁性層である自由層と、磁化固定層と自由層の間に配置された非磁性層とを有している。TMR素子では、非磁性層はトンネルバリア層である。GMR素子では、非磁性層は非磁性導電層である。TMR素子またはGMR素子では、自由層の磁化の方向が磁化固定層の磁化の方向に対してなす角度に応じて抵抗値が変化し、この角度が0°のときに抵抗値は最小値となり、角度が180°のときに抵抗値は最大値となる。以下の説明では、ブリッジ回路14,24,34,44に含まれる磁気検出素子をMR素子と記す。図3において、塗りつぶした矢印は、MR素子における磁化固定層の磁化の方向を表し、白抜きの矢印は、MR素子における自由層の磁化の方向を表している。
第1の検出回路10では、MR素子R11,R14における磁化固定層の磁化の方向は、図2に示した第1の方向D1(−X方向)と同じ方向であり、MR素子R12,R13における磁化固定層の磁化の方向は、MR素子R11,R14における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第1の方向D1との相対角度に応じて、出力ポートE11,E12の電位差が変化する。このようにして、第1の検出回路10によって、回転磁界MFの方向DMに対応した第1の出力信号S1が生成される。
第2の検出回路20では、MR素子R21,R24における磁化固定層の磁化の方向は、図2に示した第2の方向D2と同じ方向であり、MR素子R22,R23における磁化固定層の磁化の方向は、MR素子R21,R24における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第2の方向D2との相対角度に応じて、出力ポートE21,E22の電位差が変化する。このようにして、第2の検出回路20によって、回転磁界MFの方向DMに対応した第2の出力信号S2が生成される。
第3の検出回路30では、MR素子R31,R34における磁化固定層の磁化の方向は、図2に示した第3の方向D3(−Y方向)と同じ方向であり、MR素子R32,R33における磁化固定層の磁化の方向は、MR素子R31,R34における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第3の方向D3との相対角度に応じて、出力ポートE31,E32の電位差が変化する。このようにして、第3の検出回路30によって、回転磁界MFの方向DMに対応した第3の出力信号S3が生成される。
第4の検出回路40では、MR素子R41,R44における磁化固定層の磁化の方向は、図2に示した第4の方向D4と同じ方向であり、MR素子R42,R43における磁化固定層の磁化の方向は、MR素子R41,R44における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第4の方向D4との相対角度に応じて、出力ポートE41,E42の電位差が変化する。このようにして、第4の検出回路40によって、回転磁界MFの方向DMに対応した第4の出力信号S4が生成される。
なお、検出回路10〜40内の複数のMR素子における磁化固定層の磁化の方向は、MR素子の作製の精度等の観点から、上述の方向からわずかにずれていてもよい。
また、ブリッジ回路14,24,34,44は、機械的構造と配置の姿勢は同じで、それらに含まれる複数の磁化固定層の磁化の方向のみが、図3に示したようにブリッジ回路14,24,34,44間で互いに異なっていてもよい。あるいは、ブリッジ回路14,24,34,44は、機械的構造が同じである上に、機械的構造と複数の磁化固定層の磁化の方向との位置関係も同じであってもよい。この場合には、ブリッジ回路14,24,34,44の配置の姿勢を互いに異ならせることによって、それらに含まれる複数の磁化固定層の磁化の方向を、図3に示したようにブリッジ回路14,24,34,44間で互いに異ならせることができる。
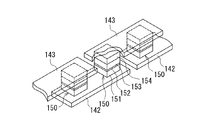
ここで、図6を参照して、MR素子の構成の一例について説明する。図6は、図3に示した回転磁界センサ1におけるMR素子の一部を示す斜視図である。この例では、1つのMR素子は、複数の下部電極142と、複数のMR膜150と、複数の上部電極143とを有している。複数の下部電極142は図示しない基板上に配置されている。個々の下部電極142は細長い形状を有している。下部電極142の長手方向に隣接する2つの下部電極142の間には、間隙が形成されている。図6に示したように、下部電極142の上面上において、長手方向の両端の近傍に、それぞれMR膜150が配置されている。MR膜150は、下部電極142側から順に積層された自由層151、非磁性層152、磁化固定層153および反強磁性層154を含んでいる。自由層151は、下部電極142に電気的に接続されている。反強磁性層154は、反強磁性材料よりなり、磁化固定層153との間で交換結合を生じさせて、磁化固定層153の磁化の方向を固定する。複数の上部電極143は、複数のMR膜150の上に配置されている。個々の上部電極143は細長い形状を有し、下部電極142の長手方向に隣接する2つの下部電極142上に配置されて隣接する2つのMR膜150の反強磁性層154同士を電気的に接続する。このような構成により、図6に示したMR素子は、複数の下部電極142と複数の上部電極143とによって直列に接続された複数のMR膜150を有している。なお、MR膜150における層151〜154の配置は、図6に示した配置とは上下が反対でもよい。
実施例の回転磁界センサ1は、更に、演算部50を備えている。図4は、回転磁界センサ1の演算部50を示す回路図である。演算部50は、第1ないし第4の検出回路10〜40の第1ないし第4の出力信号S1〜S4を用いて、角度θと対応関係を有し回転磁界センサ1が出力する角度検出値θsを決定する演算を行う。
演算部50では、第1ないし第4の検出回路10〜40の中から選択された3個の検出回路からなる4個の第1検出回路グループが規定されている。具体的には、検出回路10,20,30からなる第1検出回路グループと、検出回路20,30,40からなる第1検出回路グループと、検出回路30,40,10からなる第1検出回路グループと、検出回路40,10,20からなる第1検出回路グループが規定されている。以下の説明では、実施例における第1検出回路グループを、その第1検出回路グループに含まれる複数の検出回路を示す複数の符号を括弧で括って表す。例えば、検出回路10,20,30からなる第1検出回路グループは(10,20,30)と表す。
また、演算部50では、4個の第1検出回路グループ(10,20,30),(20,30,40),(30,40,10),(40,10,20)の各々の中に、3個の検出回路の中から選択された2個の検出回路からなる3個の第2検出回路グループが規定されている。表1に、演算部50で規定されている第2検出回路グループを示す。なお、実施例における第2検出回路グループについても、実施例における第1検出回路グループと同様の方法で表す。
なお、表1において、(30,10)と(10,30)は、いずれも、第1の検出回路10と第3の検出回路30からなる第2検出回路グループを示している。また、(40,20)と(20,40)は、いずれも、第2の検出回路20と第4の検出回路40からなる第2検出回路グループを示している。以下の説明では、(30,10)と(10,30)の表記を(30,10)に統一し、(40,20)と(20,40)の表記を(40,20)に統一する。
図4に示したように、演算部50は、角度計算部60と角度決定部70とを有している。角度計算部60は、全ての第2検出回路グループ(10,20),(20,30),(30,40),(40,10),(30,10),(40,20)の各々について、2個の検出回路の2個の出力信号に基づいて、角度θと対応関係を有する角度値を算出する。なお、複数の第1検出回路グループに属する第2検出回路グループについての角度値の算出は1回だけ行う。例えば、表1に示したように、第2検出回路グループ(10,20)は、第1検出回路グループ(10,20,30)と第1検出回路グループ(40,10,20)の両方に属しているが、第2検出回路グループ(10,20)についての角度値の算出は1回だけ行う。
角度決定部70は、4個の第1検出回路グループ(10,20,30),(20,30,40),(30,40,10),(40,10,20)から、当該第1検出回路グループに属する3個の第2検出回路グループに対応する3個の角度値の全てが所定の大きさの角度範囲内に含まれる1つ以上の正常な第1検出回路グループを抽出し、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値のうちの少なくとも1つに基づいて角度検出値θsを決定する。
演算部50は、更に、故障検出部80を有している。故障検出部80は、第1ないし第4の検出回路10〜40のうちの1つが故障した場合に、故障した検出回路を特定する。角度決定部70と故障検出部80は、例えば、特定用途向け集積回路(ASIC)またはマイクロコンピュータによって実現することができる。角度決定部70と故障検出部80をマイクロコンピュータによって実現する場合には、角度決定部70と故障検出部80は、物理的に別個の要素ではなく、ソフトウェアによって実現される。
次に、図4および図5を参照して、角度計算部60の構成について詳しく説明する。図5は、角度計算部60の角度計算回路の構成を示すブロック図である。図4に示したように、角度計算部60は、第1の角度計算回路61、第2の角度計算回路62、第3の角度計算回路63、第4の角度計算回路64、第5の角度計算回路65および第6の角度計算回路66を有している。第1ないし第6の角度計算回路61〜66は、それぞれ2つの入力端と1つの出力端とを有している。
第1の角度計算回路61の2つの入力端は、第1の検出回路10の差分検出器15の出力端と第2の検出回路20の差分検出器25の出力端に接続されている。第1の角度計算回路61は、第2検出回路グループ(10,20)について、第1および第2の検出回路10,20の第1および第2の出力信号S1,S2に基づいて、角度θと対応関係を有する角度値θs1を算出する。
第2の角度計算回路62の2つの入力端は、第2の検出回路20の差分検出器25の出力端と第3の検出回路30の差分検出器35の出力端に接続されている。第2の角度計算回路62は、第2検出回路グループ(20,30)について、第2および第3の検出回路20,30の第2および第3の出力信号S2,S3に基づいて、角度θと対応関係を有する角度値θs2を算出する。
第3の角度計算回路63の2つの入力端は、第3の検出回路30の差分検出器35の出力端と第4の検出回路40の差分検出器45の出力端に接続されている。第3の角度計算回路63は、第2検出回路グループ(30,40)について、第3および第4の検出回路30,40の第3および第4の出力信号S3,S4に基づいて、角度θと対応関係を有する角度値θs3を算出する。
第4の角度計算回路64の2つの入力端は、第4の検出回路40の差分検出器45の出力端と第1の検出回路10の差分検出器15の出力端に接続されている。第4の角度計算回路64は、第2検出回路グループ(40,10)について、第4および第1の検出回路40,10の第4および第1の出力信号S4,S1に基づいて、角度θと対応関係を有する角度値θs4を算出する。
第5の角度計算回路65の2つの入力端は、第3の検出回路30の差分検出器35の出力端と第1の検出回路10の差分検出器15の出力端に接続されている。第5の角度計算回路65は、第2検出回路グループ(30,10)について、第3および第1の検出回路30,10の第3および第1の出力信号S3,S1に基づいて、角度θと対応関係を有する角度値θs5を算出する。
第6の角度計算回路66の2つの入力端は、第4の検出回路40の差分検出器45の出力端と第2の検出回路20の差分検出器25の出力端に接続されている。第6の角度計算回路66は、第2検出回路グループ(40,20)について、第4および第2の検出回路40,20の第4および第2の出力信号S4,S2に基づいて、角度θと対応関係を有する角度値θs6を算出する。
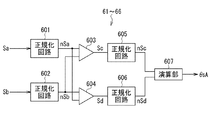
第1ないし第6の角度計算回路61〜66の回路構成は同じである。図5に示したように、第1ないし第6の角度計算回路61〜66は、それぞれ、正規化回路601,602,605,606と、加算回路603と、減算回路604と、演算部607とを含んでいる。正規化回路601,602,605,606は、それぞれ入力端と出力端とを有している。加算回路603、減算回路604および演算部607は、それぞれ2つの入力端と1つの出力端とを有している。
第1ないし第6の角度計算回路61〜66の2つの入力端は、正規化回路601,602の各入力端によって構成されている。すなわち、第1の角度計算回路61の正規化回路601,602の各入力端は、それぞれ差分検出器15,25の各出力端に接続されている。第2の角度計算回路62の正規化回路601,602の各入力端は、それぞれ差分検出器25,35の各出力端に接続されている。第3の角度計算回路63の正規化回路601,602の各入力端は、それぞれ差分検出器35,45の各出力端に接続されている。第4の角度計算回路64の正規化回路601,602の各入力端は、それぞれ差分検出器45,15の各出力端に接続されている。第5の角度計算回路65の正規化回路601,602の各入力端は、それぞれ差分検出器35,15の各出力端に接続されている。第6の角度計算回路66の正規化回路601,602の各入力端は、それぞれ差分検出器45,25の各出力端に接続されている。
加算回路603の2つの入力端は、正規化回路601,602の各出力端に接続されている。減算回路604の2つの入力端も、正規化回路601,602の各出力端に接続されている。正規化回路605の入力端は、加算回路603の出力端に接続されている。正規化回路606の入力端は、減算回路604の出力端に接続されている。演算部607の2つの入力端は、正規化回路605,606の各出力端に接続されている。
第1ないし第6の角度計算回路61〜66の出力端は、演算部607の出力端によって構成されている。図4に示したように、角度決定部70は、6つの入力端と、角度検出値θsを出力する1つの出力端とを有している。角度決定部70の6つの入力端は、それぞれ、第1ないし第6の角度計算回路61〜66の各出力端(演算部607の出力端)に接続されている。
ここで、1つの角度計算回路に入力される2つの信号をSa,Sbとし、その角度計算回路が出力する角度値をθsAとして、図5に示した角度計算回路の動作について説明する。信号Saは、正規化回路601に入力される。信号Sbは、正規化回路602に入力される。正規化回路601は、信号Saを正規化した信号nSaを加算回路603および減算回路604に対して出力する。正規化回路602は、信号Sbを正規化した信号nSbを加算回路603および減算回路604に対して出力する。正規化回路601,602は、例えば、信号Sa,Sbの最大値が共に1になり、信号Sa,Sbの最小値が共に−1になるように、信号Sa,Sbを正規化する。
加算回路603は、信号nSaと信号nSbの和を求めることを含む演算によって、加算信号Scを生成する。減算回路604は、信号nSaと信号nSbの差を求めることを含む演算によって、減算信号Sdを生成する。なお、「信号nSaと信号nSbの和(差)を求めることを含む演算」という表現は、演算は、信号nSaと信号nSbの和(差)を求めた後に、正規化等のために所定の係数を掛けたり、所定の値を加減したりする場合も含むという趣旨である。
正規化回路605は、加算信号Scを正規化した信号nScを演算部607に対して出力する。正規化回路606は、減算信号Sdを正規化した信号nSdを演算部607に対して出力する。正規化回路605,606は、例えば、加算信号Scおよび減算信号Sdの最大値が共に1になり、加算信号Scおよび減算信号Sdの最小値が共に−1になるように、加算信号Scおよび減算信号Sdを正規化する。演算部607は、信号nScと信号nSdに基づいて、角度値θsAを算出する。実施例では、角度値θsAは、角度値θs1〜θs6のうちのいずれかに対応する。演算部607による角度値θsAの算出方法(角度値θs1〜θs6の算出方法)については、後で説明する。
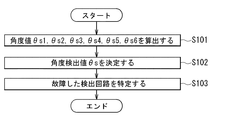
次に、実施例の角度決定方法について説明する。実施例の角度決定方法は、実施例の回転磁界センサ1を用いる。実施例の角度決定方法は、前述の要件1〜8を満たしている。実施例の角度決定方法では、先に演算部50に関連して説明したように、予め、表1に示した第1検出回路グループと第2検出回路グループが規定されている。図7は、実施例の角度決定方法を示すフローチャートである。実施例の角度決定方法は、以下の第1の手順S101、第2の手順S102および第3の手順S103を備えている。
第1の手順S101では、全ての第2検出回路グループ(10,20),(20,30),(30,40),(40,10),(30,10),(40,20)の各々について、2個の検出回路の2個の出力信号に基づいて、角度値θs1,θs2,θs3,θs4,θs5,θs6を算出する。第1の手順S101は、角度計算部60によって実行される。
第2の手順S102では、4個の第1検出回路グループ(10,20,30),(20,30,40),(30,40,10),(40,10,20)から、当該第1検出回路グループに属する3個の第2検出回路グループに対応する3個の角度値の全てが所定の大きさの角度範囲内に含まれる1つ以上の正常な第1検出回路グループを抽出する。そして、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値のうちの少なくとも1つに基づいて角度検出値θsを決定する。第2の手順S102は、角度決定部70によって実行される。
第3の手順S103は、第1ないし第4の検出回路10〜40のうちの1つが故障した場合に、故障した検出回路を特定する手順である。この第3の手順S103では、まず、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値が含まれる所定の大きさの範囲を正常角度値範囲とする。次に、4個の第1検出回路グループ(10,20,30),(20,30,40),(30,40,10),(40,10,20)から、1つ以上の正常な第1検出回路グループ以外の複数の異常な第1検出回路グループを抽出する。次に、複数の異常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値を、正常角度値範囲内の正常角度値と正常角度値範囲外の異常角度値とに分類する。次に、全ての異常角度値に対応する全ての第2検出回路グループには属しているが、全ての正常角度値に対応する全ての第2検出回路グループには属さない検出回路を、故障した検出回路と特定する。第3の手順S103は、故障検出部80によって実行される。
なお、第3の手順S103は、第2の手順S102を実行した結果、全ての第1検出回路グループが正常な第1検出回路グループとして抽出されなかった場合、すなわち、第1ないし第4の検出回路10〜40のうちの1つが故障したと推定される場合にのみ実行されてもよい。
次に、図5を参照して、第1の手順S101および角度計算部60における角度値θs1〜θs6の算出方法について詳しく説明する。なお、以下の説明では、検出回路10〜40に故障が発生していないものとする。まず、第1の角度計算回路61による角度値θs1の算出方法について説明する。前述の角度計算回路の動作の説明において、信号Sa,Sbを、第1および第2の出力信号S1,S2に置き換えれば、角度値θs1の算出方法の説明になる。第1の出力信号S1と第2の出力信号S2の位相差の絶対値は、45°(π/4)である。そこで、信号Sa(第1の出力信号S1)を正規化した信号nSaをcosθと表し、信号Sb(第2の出力信号S2)を正規化した信号nSbをcos(θ−π/4)と表す。この場合、加算信号Scを正規化した信号nScはcos(θ−π/8)となり、減算信号Sdを正規化した信号nSdはsin(θ−π/8)となる。
ここで、θ−π/8をθp1と表す。cos(θ−π/8)、sin(θ−π/8)は、それぞれcosθp1、sinθp1と表される。θs1とθp1との間には、θs1=θp1+π/8の関係が成立する。第1の角度計算回路61の演算部607は、下記の式(1)によって、θs1を算出する。なお、“atan”は、アークタンジェントを表す。
θs1=θp1+π/8
=atan(sinθp1/cosθp1)+π/8 …(1)
式(1)におけるatan(sinθp1/cosθp1)は、θp1を求めるアークタンジェント計算を表している。なお、θp1が0°以上360°未満の範囲内では、式(1)におけるθp1の解には、180°異なる2つの値がある。しかし、cosθp1,sinθp1の正負の組み合わせ、すなわち信号nSc,nSdの正負の組み合わせにより、θp1の真の値が、式(1)におけるθp1の2つの解のいずれであるかを判別することができる。すなわち、信号nScが正の値のときは、θp1は、0°以上90゜未満、および270°より大きく360°以下の範囲内である。信号nScが負の値のときは、θp1は90°よりも大きく270°よりも小さい。信号nSdが正の値のときは、θp1は0°よりも大きく180°よりも小さい。信号nSdが負の値のときは、θp1は180°よりも大きく360°よりも小さい。演算部607は、上記の信号nSc,nSdの正負の組み合わせの判定により、0°以上360°未満の範囲内でθp1を求める。
次に、第2の角度計算回路62による角度値θs2の算出方法について説明する。前述の角度計算回路の動作の説明において、信号Sa,Sbを、第2および第3の出力信号S2,S3に置き換えれば、角度値θs2の算出方法の説明になる。ここでは、信号Sa(第2の出力信号S2)を正規化した信号nSaをcos(θ−π/4)と表す。また、第1の出力信号S1と第3の出力信号S3の位相差の絶対値は、90°(π/2)である。そこで、信号Sb(第3の出力信号S3)を正規化した信号nSbをcos(θ−π/2)と表す。この場合、加算信号Scを正規化した信号nScはcos(θ−3π/8)となり、減算信号Sdを正規化した信号nSdはsin(θ−3π/8)となる。
ここで、θ−3π/8をθp2と表す。cos(θ−3π/8)、sin(θ−3π/8)は、それぞれcosθp2、sinθp2と表される。θs2とθp2との間には、θs2=θp2+3π/8の関係が成立する。第2の角度計算回路62の演算部607は、下記の式(2)によって、θs2を算出する。
θs2=θp2+3π/8
=atan(sinθp2/cosθp2)+3π/8 …(2)
式(2)におけるatan(sinθp2/cosθp2)は、θp2を求めるアークタンジェント計算を表している。演算部607は、θp1を求める場合と同様の信号nSc,nSdの正負の組み合わせの判定により、0°以上360°未満の範囲内でθp2を求める。
次に、第3の角度計算回路63による角度値θs3の算出方法について説明する。前述の角度計算回路の動作の説明において、信号Sa,Sbを、第3および第4の出力信号S3,S4に置き換えれば、角度値θs3の算出方法の説明になる。ここでは、信号Sa(第3の出力信号S3)を正規化した信号nSaをcos(θ−π/2)と表す。また、第1の出力信号S1と第4の出力信号S4の位相差の絶対値は、135°(3π/4)である。そこで、信号Sb(第4の出力信号S4)を正規化した信号nSbをcos(θ−3π/4)と表す。この場合、加算信号Scを正規化した信号nScはcos(θ−5π/8)となり、減算信号Sdを正規化した信号nSdはsin(θ−5π/8)となる。
ここで、θ−5π/8をθp3と表す。cos(θ−5π/8)、sin(θ−5π/8)は、それぞれcosθp3、sinθp3と表される。θs3とθp3との間には、θs3=θp3+5π/8の関係が成立する。第3の角度計算回路63の演算部607は、下記の式(3)によって、θs3を算出する。
θs3=θp3+5π/8
=atan(sinθp3/cosθp3)+5π/8 …(3)
式(3)におけるatan(sinθp3/cosθp3)は、θp3を求めるアークタンジェント計算を表している。演算部607は、θp1を求める場合と同様の信号nSc,nSdの正負の組み合わせの判定により、0°以上360°未満の範囲内でθp3を求める。
次に、第4の角度計算回路64による角度値θs4の算出方法について説明する。前述の角度計算回路の動作の説明において、信号Sa,Sbを、第4および第1の出力信号S4,S1に置き換えれば、角度値θs4の算出方法の説明になる。ここでは、信号Sa(第4の出力信号S4)を正規化した信号nSaをcos(θ−3π/4)と表し、信号Sb(第1の出力信号S1)を正規化した信号nSbをcosθと表す。この場合、加算信号Scを正規化した信号nScは−sin(θ−7π/8)となり、減算信号Sdを正規化した信号nSdは−cos(θ−7π/8)となる。
ここで、θ−7π/8をθp4と表す。−sin(θ−7π/8)、−cos(θ−7π/8)は、それぞれ−sinθp4、−cosθp4と表される。θs4とθp4との間には、θs4=θp4+7π/8の関係が成立する。第4の角度計算回路64の演算部607は、下記の式(4)によって、θs4を算出する。
θs4=θp4+7π/8
=atan(sinθp4/cosθp4)+7π/8 …(4)
式(4)におけるatan(sinθp4/cosθp4)は、θp4を求めるアークタンジェント計算を表している。なお、信号nSc(−sinθp4)が正の値のときは、θp4は180°よりも大きく360°よりも小さい。信号nScが負の値のときは、θp4は0°よりも大きく180°よりも小さい。信号nSd(−cosθp4)が正の値のときは、θp4は90°よりも大きく270°よりも小さい。信号nSdが負の値のときは、θp4は、0°以上90゜未満、および270°より大きく360°以下の範囲内である。演算部607は、上記の信号nSc,nSdの正負の組み合わせの判定により、0°以上360°未満の範囲内でθp4を求める。
次に、第5の角度計算回路65による角度値θs5の算出方法について説明する。前述の角度計算回路の動作の説明において、信号Sa,Sbを、第3および第1の出力信号S3,S1に置き換えれば、角度値θs5の算出方法の説明になる。ここでは、信号Sa(第3の出力信号S3)を正規化した信号nSaをcos(θ−π/2)と表し、信号Sb(第1の出力信号S1)を正規化した信号nSbをcosθと表す。この場合、加算信号Scを正規化した信号nScはcos(−θ+π/4)となり、減算信号Sdを正規化した信号nSdはsin(−θ+π/4)となる。
ここで、−θ+π/4をθp5と表す。cos(−θ+π/4)、sin(−θ+π/4)は、それぞれcosθp5、sinθp5と表される。θs5とθp5との間には、θs5=−θp5+π/4の関係が成立する。第5の角度計算回路65の演算部607は、下記の式(5)によって、θs5を算出する。
θs5=−θp5+π/4
=−atan(sinθp5/cosθp5)+π/4 …(5)
式(5)におけるatan(sinθp5/cosθp5)は、θp5を求めるアークタンジェント計算を表している。演算部607は、θp1を求める場合と同様の信号nSc,nSdの正負の組み合わせの判定により、0°以上360°未満の範囲内でθp5を求める。
次に、第6の角度計算回路66による角度値θs6の算出方法について説明する。前述の角度計算回路の動作の説明において、信号Sa,Sbを、第4および第2の出力信号S4,S2に置き換えれば、角度値θs6の算出方法の説明になる。ここでは、信号Sa(第4の出力信号S4)を正規化した信号nSaをcos(θ−3π/4)と表し、信号Sb(第2の出力信号S2)を正規化した信号nSbをcos(θ−π/4)と表す。この場合、加算信号Scを正規化した信号nScはcos(−θ+π/2)となり、減算信号Sdを正規化した信号nSdはsin(−θ+π/2)となる。
ここで、−θ+π/2をθp6と表す。cos(−θ+π/2)、sin(−θ+π/2)は、それぞれcosθp6、sinθp6と表される。θs6とθp6との間には、θs6=−θp6+π/2の関係が成立する。第6の角度計算回路66の演算部607は、下記の式(6)によって、θs6を算出する。
θs6=−θp6+π/2
=−atan(sinθp6/cosθp6)+π/2 …(6)
式(6)におけるatan(sinθp6/cosθp6)は、θp6を求めるアークタンジェント計算を表している。演算部607は、θp1を求める場合と同様の信号nSc,nSdの正負の組み合わせの判定により、0°以上360°未満の範囲内でθp6を求める。
なお、θs1〜θs6は、0°以上360°未満の範囲内の値であることが好ましい。しかし、上述のように、演算部607は、0°以上360°未満の範囲内でθp1〜θp6を求めることから、式(1)〜(6)によって算出されるθs1〜θs6は、0°未満または360°以上の値になる場合がある。そこで、式(1)〜(6)によってθs1〜θs6を算出した後に、これらの角度値のうち0°未満または360°以上の角度値を、0°以上360°未満の範囲内の値に変更する演算を行ってもよい。具体的には、0°未満の角度値に対しては、その角度値に360°を加える演算を行い、360°以上の角度値に対しては、その角度値から360°を引く演算を行う。これらの演算は、演算部607によって行われてもよいし、角度決定部70によって行われてもよい。以下の説明では、θs1〜θs6は、0°以上360°未満の範囲内の値であるものとする。
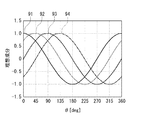
ここで、第1ないし第4の出力信号S1〜S4と角度値θs1〜θs6の性質について説明する。前述のように、理想的には、第1ないし第4の出力信号S1〜S4の波形は、正弦曲線となる。ここで、第1ないし第4の出力信号S1〜S4は、それぞれ、理想的な正弦曲線を描くように周期的に変化する理想成分と、それ以外の誤差成分とを含むものとする。なお、第1ないし第4の出力信号S1〜S4のそれぞれの誤差成分は、第1ないし第4の検出回路10〜40が故障していなくても生じ得る。
図8は、第1ないし第4の出力信号S1〜S4の理想成分の波形の一例を示す波形図である。図8において、横軸は角度θを示し、縦軸は理想成分の大きさを示している。符号91,92,93,94で示す波形は、それぞれ、出力信号S1,S2,S3,S4の理想成分を示している。なお、図8では、理想成分の最大値が1になり、最小値が−1になるように正規化している。
第1ないし第4の出力信号S1〜S4がそれぞれ誤差成分を含む場合、第1ないし第4の出力信号S1〜S4に基づいて算出される角度値θs1〜θs6は、それぞれ角度誤差を含むことになる。角度値θs1〜θs6の角度誤差は、それぞれ、回転磁界MFの方向DMが理想的に回転する場合に想定される角度値θs1〜θs6の理論値に対する誤差である。
次に、第2の手順S102および角度決定部70において正常な第1検出回路グループを抽出するための原理、ならびに第3の手順S103および故障検出部80において異常な第1検出回路グループを抽出するための原理について説明する。第1ないし第4の検出回路10〜40がいずれも正常である場合には、角度値θs1〜θs6は、一致するか極めて近い値になり、角度値θs1〜θs6のそれぞれの角度誤差も、一致するか極めて近い値になる。
第1ないし第4の検出回路10〜40のうちの1つが故障すると、故障した検出回路の出力信号は、その検出回路が正常であるときの出力信号とは異なったものとなる。その結果、6個の角度値θs1〜θs6のうち、故障した1つの検出回路を含む3個の第2検出回路グループに対応する3個の角度値は誤った角度値となり、他の3個の角度値は正しい角度値となる。3個の正しい角度値は、一致するか極めて近い値になるのに対し、3個の誤った角度値は、3個の正しい角度値とは明らかに異なる。同様に、3個の正しい角度値の角度誤差は、一致するか極めて近い値になるのに対し、3個の誤った角度値の角度誤差は、3個の正しい角度値の角度誤差とは明らかに異なる。以下、これについて、第3の検出回路30が故障した場合を例にとって具体的に説明する。
第3の検出回路30が故障した場合には、第3の検出回路30を含む3個の第2検出回路グループ(20,30),(30,40),(30,10)について算出された3個の角度値θs2,θs3,θs5は、誤った角度値となり、第3の検出回路30を含まない3個の第2検出回路グループ(10,20),(40,10),(40,20)について算出された3個の角度値θs1,θs4,θs6は、正しい角度値となる。すなわち、角度値θs1,θs4,θs6は、一致するか極めて近い値になるのに対し、角度値θs2,θs3,θs5は、互いに明らかに異なると共に、角度値θs1,θs4,θs6とも明らかに異なる。同様に、角度値θs1,θs4,θs6の角度誤差は、一致するか極めて近い値になるのに対し、角度値θs2,θs3,θs5の角度誤差は、互いに明らかに異なると共に、角度値θs1,θs4,θs6の角度誤差とも明らかに異なる。
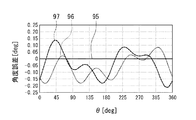
図9は、第3の検出回路30が故障した場合における角度値θs1,θs3〜θs6のそれぞれの角度誤差の一例を示す波形図である。図9において、横軸は角度θを示し、縦軸は角度誤差の大きさを示している。符号95で示す波形は角度値θs1,θs4,θs6の角度誤差を示し、符号96で示す波形は角度値θs3の角度誤差を示し、符号97で示す波形は角度値θs5の角度誤差を示している。この例では、角度値θs1,θs4,θs6の角度誤差は、いずれも、角度θに関わらずに常に0である。一方、角度値θs3,θs5の角度誤差96,97は、互いに明らかに異なると共に、角度値θs1,θs4,θs6の角度誤差95とも明らかに異なる。なお、図示しないが、角度値θs2の角度誤差は、角度値θs3,θs5の角度誤差96,97とは明らかに異なると共に、角度値θs1,θs4,θs6の角度誤差95とも明らかに異なる。
なお、角度値θs2,θs3,θs5のうちの2つは、あるタイミングで、互いに一致するか極めて近い値になる。図9に示した例では、角度値θs3,θs5の角度誤差96,97のそれぞれの波形が重なるタイミングで、角度値θs3,θs5は、互いに一致するか極めて近い値になる。しかし、そのタイミングでも、角度値θs3,θs5の角度誤差96,97は、角度値θs1,θs4,θs6の角度誤差95とは明らかに異なることから、角度値θs3,θs5は、角度値θs1,θs4,θs6とは明らかに異なる。同様に、あるタイミングで、角度値θs2と角度値θs3またはθs5が一致するか極めて近い値になったとしても、それら2つの角度値は、角度値θs1,θs4,θs6とは明らかに異なる。
実施例の回転磁界センサ1および実施例の角度決定方法では、前述のように、4個の第1検出回路グループが規定されていると共に、4個の第1検出回路グループの各々の中に、3個の第2検出回路グループが規定されている。これは、以下のような性質を利用して、正常な第1検出回路グループと異常な第1検出回路グループとを区別するためである。すなわち、故障した検出回路が属さない第1検出回路グループでは、それに属する3個の第2検出回路グループに対応する3個の角度値は、いずれも正しい角度値となり、3個の角度値の全てが所定の大きさの角度範囲内に含まれる。これに対し、故障した1つの検出回路が属する第1検出回路グループでは、それに属する3個の第2検出回路グループに対応する3個の角度値は、2つの誤った角度値を含むため、3個の角度値のばらつきは大きくなる。すなわち、この3個の角度値の全てが所定の大きさの角度範囲内に含まれることはない。仮に、あるタイミングで2つの誤った角度値が一致するか極めて近い値になったとしても、この2つの誤った角度値は残りの1つの角度値(正しい角度値)とは明らかに異なることから、3個の角度値のばらつきは大きくなる。従って、故障した検出回路が属さない第1検出回路グループは、それに属する3個の第2検出回路グループに対応する3個の角度値の全てが所定の大きさの角度範囲内に含まれることで、判別することができる。この性質を利用して、実施例の回転磁界センサ1および実施例の角度決定方法では、1つ以上の正常な第1検出回路グループと、複数の異常な第1検出回路グループとを抽出する。
ここで、所定の大きさの角度範囲について説明する。始めに、0°以上360°未満の範囲内において、角度範囲を規定する2つの角度をθA,θBとする。θBは、θAより大きい。次に、θD1,θD2を、下記のように定義する。
θD1=θB−θA
θD2=θA+360°−θB
次に、θA,θBの角度差θDを、以下のように定義する。θD1がθD2以下である場合にはθD1を角度差θDとし、θD1がθD2より大きい場合には、θD2を角度差θDとする。
所定の大きさの角度範囲は、角度差θDが所定の大きさとなる2つの角度θA,θBによって、以下の(1)、(2)のように定義される。
(1)θD1がθD2以下である場合には、所定の大きさの角度範囲は、θA以上θB以下の範囲である。
(2)θD1がθD2より大きい場合には、所定の大きさの角度範囲は、θB以上360°未満の範囲および0°以上θA以下の範囲である。
次に、g個(実施例では3個)の角度値の全てが所定の大きさの角度範囲内に含まれるか否かを判定する方法について説明する。まず、2つの角度値の差を、前述の角度差θDと同様に定義する。すなわち、2つの角度値をθA,θBとして、前記のθD1,θD2を求め、θD1がθD2以下である場合にはθD1を2つの角度値の差とし、θD1がθD2より大きい場合には、θD2を2つの角度値の差とする。
g個の角度値の全てが所定の大きさの角度範囲内に含まれるということは、g個の角度値のうちのどの2つの角度値の差も所定の大きさ以下であるということである。従って、g個の角度値のうちのどの2つの角度値の差も所定の大きさ以下であるか否かを判定することによって、g個の角度値の全てが所定の大きさの角度範囲内に含まれるか否かを判定することができる。
上記所定の大きさは、検出回路の故障に起因しない角度値のばらつきを考慮しても正常な第1検出回路グループに属するg個の第2検出回路グループに対応するg個の角度値の全ては所定の大きさの角度範囲内に含まれ、異常な第1検出回路グループに属するg個の第2検出回路グループに対応するg個の角度値の全ては所定の大きさの角度範囲内に含まれることはないように設定される。所定の大きさは、例えば0.02°である。
角度決定部70は、以上説明した方法で、G個の第1検出回路グループから、1つ以上の正常な第1検出回路グループを抽出する。故障検出部80は、G個の第1検出回路グループから、角度決定部70で抽出された1つ以上の正常な第1検出回路グループ以外の複数の異常な第1検出回路グループを抽出する。第3の検出回路30が故障した場合の例では、角度決定部70は、第3の検出回路30が属さない第1検出回路グループ(40,10,20)を正常な第1検出回路グループとして抽出する。また、故障検出部80は、第3の検出回路30が属する第1検出回路グループ(10,20,30),(20,30,40),(30,40,10)を異常な第1検出回路グループとして抽出する。
検出回路10〜40に故障が発生していない場合には、4個の第1検出回路グループとも、それに属する3個の第2検出回路グループに対応する3個の角度値の全てが所定の大きさの角度範囲内に含まれる。この場合、角度決定部70は、4個の第1検出回路グループの全てを正常な第1検出回路グループとして抽出する。
なお、第1ないし第4の検出回路10〜40のうちの1つが故障した場合であっても、検出回路10〜40に故障が発生していない場合と同様に、4個の第1検出回路グループとも、それに属する3個の第2検出回路グループに対応する3個の角度値の全てが所定の大きさの角度範囲内に含まれる場合には、角度決定部70は、4個の第1検出回路グループの全てを正常な第1検出回路グループとして抽出することになる。しかし、これは、誤った角度値を含む全ての角度値が同じ値または極めて近い値になった場合であるため、誤った角度値を正しい角度値とみなしても問題はない。
次に、第2の手順S102における角度検出値θsの決定方法について説明する。第2の手順S102では、前述のように抽出された1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値のうちの少なくとも1つに基づいて角度検出値θsを決定する。角度決定部70は、予め決められた規則に従って、角度検出値θsを決定する。予め決められた規則とは、例えば、上記全ての角度値の平均値を、角度検出値θsとするといったものや、角度値をθsr(rは1〜6の整数)と表したときに、上記全ての角度値のうち、rの値が最も小さい角度値を、角度検出値θsとするといったものである。4個の第1検出回路グループの全てが正常な第1検出回路グループとして抽出された場合には、角度決定部70は、例えば、θs1〜θs6の平均値を角度検出値θsとして出力したり、θs1を角度検出値として出力したりする。また、第1検出回路グループ(40,10,20)が正常な第1検出回路グループとして抽出された場合には、角度決定部70は、例えば、θs1,θs4,θs6の平均値を角度検出値θsとして出力したり、θs1を角度検出値θsとして出力したりする。なお、本実施の形態において、角度値が0°以上360°未満の範囲内の値で表される場合であって、複数の角度値の平均値を求める際に、複数の角度値の中に、0°以上90°以下の範囲内の1つ以上の角度値θX1と、270°以上360°未満の範囲内の1つ以上の角度値θX2の両方が含まれる場合には、例外的に、以下のようにして複数の角度値の平均値を求める。まず、θX2−360°をθX3とする。そして、1つ以上のθX1と1つ以上のθX3の平均値を暫定平均値とする。暫定平均値が0°以上の場合には、暫定平均値を複数の角度値の平均値とし、暫定平均値が負の値の角度のときは、暫定平均値に360°を加えた値を複数の角度値の平均値とする。
次に、第3の手順S103における故障回路の特定方法について説明する。第3の手順S103では、まず、第2の手順S102において抽出された1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値が含まれる所定の大きさの範囲を正常角度値範囲として規定する。正常角度値範囲は、例えば、第2の手順S102において抽出された1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値の平均値を中心とする上記の所定の大きさ(例えば0.02°)の範囲とする。角度値が0°以上360°未満の範囲内の値で表される場合には、上記の平均値をθCとし、上記の所定の大きさをθWとすると、以下の第1および第2の例外を除いて、正常角度値範囲は、θC−θW/2以上、θC+θW/2以下の範囲である。第1の例外は、θC+θW/2が360°以上になる場合である。この場合には、θC−θW/2以上360°未満の範囲および0°以上θC+θW/2−360°以下の範囲を正常角度値範囲とする。第2の例外は、θC−θW/2が負の値の角度になる場合である。この場合には、θC−θW/2+360°以上360°未満の範囲および0°以上θC+θW/2以下の範囲を正常角度値範囲とする。
第3の手順S103では、次に、前述の方法によって、複数の異常な第1検出回路グループを抽出する。次に、複数の異常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値を、上記正常角度値範囲内の正常角度値と上記正常角度値範囲外の異常角度値とに分類する。そして、全ての異常角度値に対応する全ての第2検出回路グループには属しているが、全ての正常角度値に対応する全ての第2検出回路グループには属さない検出回路を、故障した検出回路と特定する。例えば、角度決定部70によって1つの第1検出回路グループ(40,10,20)が正常な第1検出回路グループとして抽出され、故障検出部80によって3つの第1検出回路グループ(10,20,30),(20,30,40),(30,40,10)が異常な第1検出回路グループとして抽出された場合には、故障検出部80は、角度値θs1,θs4,θs6を正常角度値に分類し、角度値θs2,θs3,θs5を異常角度値に分類する。そして、故障検出部80は、角度値θs2,θs3,θs5に対応する全ての第2検出回路グループ(20,30),(30,40),(30,10)には属しているが、角度値θs1,θs4,θs6に対応する全ての第2検出回路グループ(10,20),(40,10),(40,20)には属していない検出回路30を、故障した検出回路と特定する。
以上説明した実施例の回転磁界センサ1および実施例の角度決定方法では、Nが4、Mが3、Gが4、mが2、gが3である。しかし、本実施の形態に係る回転磁界センサ1および角度決定方法では、複数の検出回路のうちの1つが故障しても正しい角度検出値θsを出力できるようにするためには、前述の要件1〜6を満たしていればよく、更に、故障した検出回路を特定できるようにするためには、前述の要件1〜8を満たしていればよい。本実施の形態に係る回転磁界センサ1および角度決定方法において、故障した検出回路を特定する必要がない場合には、実施例における故障検出部80および第3の手順S103は不要である。
前述のように、角度計算部は、全ての第2検出回路グループに対応する複数の角度値の各々を、対応する1つの第2検出回路グループを構成するm個の検出回路のm個の出力信号に基づいて算出する。ここで、mが3以上の場合における複数の角度値の算出方法の一例について説明する。この方法では、複数の第2検出回路グループに対応させて、図5に示した角度計算回路と同様の構成の複数の角度計算回路を用意する。また、第2検出回路グループ毎に、それぞれ1個以上、(m−1)個以下の検出回路からなる2つのサブグループを作成する。m個の検出回路の各々は、少なくとも一方のサブグループを構成するために用いられる。そして、サブグループ毎に1つのサブグループ信号を生成する。1個の検出回路からなるサブグループのサブグループ信号は、1個の検出回路の出力信号そのままでよい。複数の検出回路からなるサブグループのサブグループ信号は、複数の検出回路の複数の出力信号を用いた、和や差等を求める演算によって生成される。このようにして、第2検出回路グループ毎に2つのサブグループ信号が生成される。この方法では、第2検出回路グループ毎に、2つのサブグループ信号を、その第2検出回路グループに対応する角度計算回路の2つの入力端に与える。角度計算回路は、2つの入力端に与えられた2つのサブグループ信号に基づいて、角度計算回路61〜66と同様にして、角度θと対応関係を有する角度値を算出する。
なお、mが2の場合、角度値を精度よく算出するために、1つの第2検出回路グループを構成する2つの検出回路の2つの出力信号の位相差の絶対値は、0°および180°以外であり、0°および180°から、ある程度離れていることが好ましい。具体的には、1つの第2検出回路グループを構成する2つの検出回路の2つの出力信号の位相差の絶対値は、15°〜165°の範囲内であることが好ましく、30°〜150°の範囲内であることがより好ましい。図3に示した例では、第2検出回路グループ(10,20)を構成する検出回路10,20の出力信号S1,S2の位相差の絶対値、第2検出回路グループ(20,30)を構成する検出回路20,30の出力信号S2,S3の位相差の絶対値、第2検出回路グループ(30,40)を構成する検出回路30,40の出力信号S3,S4の位相差の絶対値は、それぞれ45°である。また、第2検出回路グループ(40,10)を構成する検出回路40,10の出力信号S4,S1の位相差の絶対値は135°である。また、第2検出回路グループ(30,10)を構成する検出回路30,10の出力信号S3,S1の位相差の絶対値、第2検出回路グループ(40,20)を構成する検出回路40,20の出力信号S4,S2の位相差の絶対値は、それぞれ90°である。これら6つの位相差の絶対値は、いずれも、上記の条件を満たしている。
同様に、mが3以上の場合、第2検出回路グループ毎の2つのサブグループ信号の位相差の絶対値は、15°〜165°の範囲内であることが好ましく、30°〜150°の範囲内であることがより好ましい。なお、この場合、2つのサブグループ信号が上記の条件を満たす限り、1つの第2検出回路グループを構成するm個の検出回路は、出力信号の位相差の絶対値が0°または180°となるような複数の検出回路を含んでいてもよい。
次に、前述の要件1ないし要件8の意味について詳しく説明しながら、本実施の形態に係る回転磁界センサ1および角度決定方法について概念的に説明する。N個の検出回路のうちの1つが故障しても正しい角度検出値θsを出力できるようにするためには、以下の要件1〜6を満たすことが必要である。
要件1:Nは、4以上の整数である。
要件2:Mは、3以上(N−1)以下の整数である。
要件3:N個の検出回路の各々は、1個以上(G−1)個以下の第1検出回路グループに属する。
要件4:mは、2以上(M−1)以下の整数である。
要件5:gは、M/m以上MCm以下の整数である。
要件6:1つの第1検出回路グループ内で、M個の検出回路の各々は、1個以上(g−1)個以下の第2検出回路グループに属する。
N個の検出回路のうちの1つが故障した場合に、正しい角度検出値θsを出力でき、且つ故障した検出回路を特定できるようにするためには、要件1ないし要件6に加えて、以下の要件7,8を満たすことが必要である。
要件7:gは、M以上である。
要件8:1つの第1検出回路グループ内で、M個の検出回路の各々は、m個以上の第2検出回路グループに属する。
要件7は要件5を狭めるものであるため、要件5と要件7を合わせると、以下の要件5Aとなる。また、要件8は要件6を狭めるものであるため、要件6と要件8を合わせると、以下の要件6Aとなる。
要件5A:gは、M以上MCm以下の整数である。
要件6A:1つの第1検出回路グループ内で、M個の検出回路の各々は、m個以上(g−1)個以下の第2検出回路グループに属する。
従って、N個の検出回路のうちの1つが故障した場合に、正しい角度検出値θsを出力でき、且つ故障した検出回路を特定できるようにするためには、要件1〜4,5A,6Aを満たす必要があると言える。
以下、各要件の意味について説明する。まず、要件4について説明する。複数の検出回路の出力信号に基づいて角度値を算出するためには、mは2以上の整数である必要がある。1つの第1検出回路グループに属する複数の第2検出回路グループを作成しなければ、1つの第1検出回路グループに属する複数の第2検出回路グループに対応する複数の角度値の全てが所定の大きさの角度範囲内に含まれるか否かを判定することができない。1つの第1検出回路グループに属する複数の第2検出回路グループを作成できるようにするためには、mは(M−1)以下である必要がある。
次に、要件2について説明する。mが2以上の整数であることから、1つの第1検出回路グループに属する複数の第2検出回路グループを作成できるようにするためには、Mは3以上の整数である必要がある。また、N個の検出回路のうちの1つが故障しても、故障した検出回路が属さない第1検出回路グループが1つ以上存在するようにするためには、Mは(N−1)以下である必要がある。
次に、要件1について説明する。要件2を満たすMが存在するためには、Nは4以上の整数である必要がある。
次に、要件3について説明する。角度値を算出するために使用されない検出回路が存在しないようにするためには、N個の検出回路の各々は、1個以上の第1検出回路グループに属する必要がある。また、N個の検出回路のうちの1つが故障しても、故障した検出回路が属さない第1検出回路グループが1つ以上存在するようにするためには、N個の検出回路の各々は、(G−1)個以下の第1検出回路グループに属する必要がある。なお、Gの取り得る値は、要件1〜3によって制限される。例えば、Nが4、Mが3の場合は、Gの取り得る値は4だけである。また、Gの取り得る値の上限値は、NCMである。なお、NCMは、N個の検出回路の中からM個の検出回路を選ぶときの組み合わせの総数である。NCMは、次の式で表される。
NCM={N×(N−1)×・・・×(N−M+1)}/{M×(M−1)×・・・×1}
次に、要件5について説明する。1つの第1検出回路グループ内で、どの第2検出回路グループにも属さない検出回路が存在しないようにするために、gは、M/m以上の整数である必要がある。なお、g個の第2検出回路グループは、同じ複数の検出回路の組み合わせからなる2つ以上の第2検出回路グループを含まないように作成される。従って、gは、MCm以下となる。なお、MCmは、M個の検出回路の中からm個の検出回路を選ぶときの組み合わせの総数である。MCmは、次の式で表される。
MCm={M×(M−1)×・・・×(M−m+1)}/{m×(m−1)×・・・×1}
次に、要件5Aについて説明する。N個の検出回路のうちの1つが故障したときに、故障した検出回路を特定できるようにするためには、全ての異常角度値に対応する全ての第2検出回路グループには属しているが、全ての正常角度値に対応する全ての第2検出回路グループには属さない1つの検出回路を特定できるようにする必要がある。そのためには、gはM以上の整数である必要がある。gがMよりも小さいと、N個の検出回路のうちの1つが故障したときに、正常と判断できない検出回路が複数存在し得る。なお、要件5と同様に、gはMCm以下である。
次に、要件6について説明する。1つの第1検出回路グループ内で、どの第2検出回路グループにも属さない検出回路が存在しないようにするために、1つの第1検出回路グループ内で、M個の検出回路の各々は、1個以上の第2検出回路グループに属する必要がある。また、1つの検出回路が故障した場合でも、全ての第1検出回路グループの各々において、正常角度値が少なくとも1つは得られるようにするために、1つの第1検出回路グループ内で、M個の検出回路の各々は、(g−1)個以下の第2検出回路グループに属する必要がある。
次に、要件6Aについて説明する。前述のように、N個の検出回路のうちの1つが故障したときに、故障した検出回路を特定できるようにするためには、全ての異常角度値に対応する全ての第2検出回路グループには属しているが、全ての正常角度値に対応する全ての第2検出回路グループには属さない1つの検出回路を特定できるようにする必要がある。そのためには、1つの第1検出回路グループ内で、M個の検出回路の各々は、m個以上の第2検出回路グループに属する必要がある。1つの第1検出回路グループ内で、M個の検出回路の各々がm個未満の第2検出回路グループにしか属していないと、N個の検出回路のうちの1つが故障したときに、全ての異常角度値に対応する全ての第2検出回路グループには属しているが、全ての正常角度値に対応する全ての第2検出回路グループには属さない検出回路が複数存在し得る。なお、要件6と同様に、1つの第1検出回路グループ内で、M個の検出回路の各々は、(g−1)個以下の第2検出回路グループに属する必要がある。
次に、複数の具体例を参照しながら、M,G,m,gの取り得る値と、第1検出回路グループの構成および第2検出回路グループの構成について説明する。以下の説明では、N個の検出回路を、それぞれ1〜Nの整数の番号を付して表す。また、第1検出回路グループおよび第2検出回路グループを、そのグループに含まれる複数の検出回路の複数の番号を括弧で括って表す。例えば、番号が1,2,3の3つの検出回路からなる第1検出回路グループと第2検出回路グループは(1,2,3)と表し、番号が1,2の2つの検出回路からなる第2検出回路グループは(1,2)と表す。
[Nが4の場合]
要件1から、Nの最小値は4である。そこで、まず、Nが4の場合について考える。Nが4の場合は、要件2〜4から、Mの取り得る値は3だけであり、Gの取り得る値は4だけであり、mの取り得る値は2だけである。また、この場合、要件5,6を満たすgの値は3だけであり、要件5A,6Aを満たすgの値も3だけである。
Nが4、Mが3、Gが4、mが2、gが3で、要件1〜4,5A,6Aを満たす場合における第1検出回路グループの構成および第2検出回路グループの構成は、以下の表2のようになる。
なお、図3および図4に示した回転磁界センサ1は、表2の例に従って構成されたものである。
[Nが5の場合]
次に、Nが5の場合について考える。Nが5の場合は、要件2から、Mの取り得る値には、3と4がある。
[Nが5、Mが3の場合]
Nが5、Mが3の場合は、要件3,4から、Gの取り得る値は3以上10以下であり、mの取り得る値は2だけである。また、この場合、要件5,6を満たすgの値は3だけであり、要件5A,6Aを満たすgの値も3だけである。
[Nが5、Mが4の場合]
Nが5、Mが4の場合は、要件3から、Gの取り得る値は5だけである。また、この場合、要件4から、mの取り得る値には、2と3がある。
Nが5、Mが4、mが2の場合、要件5,6を満たすgの値は2以上6以下であり、要件5A,6Aを満たすgの値は4以上6以下である。
Nが5、Mが4、mが3の場合、要件5,6を満たすgの値は4だけであり、要件5A,6Aを満たすgの値も4だけである。
Nが5、Mが4、Gが5、mが3、gが4で、要件1〜4,5A,6Aを満たす場合における第1検出回路グループの構成および第2検出回路グループの構成は、以下の表3のようになる。
ここまで説明してきた複数の具体例からも分かるように、Nの値に応じて、M,G,m,gの取り得る値が変化すると共に、第1検出回路グループの構成および第2検出回路グループの構成が変化する。Nが6以上の場合には、第2検出回路グループの構成は、要件1〜6を満たす場合と要件1〜4,5A,6Aを満たす場合で大きく異なる。以下、これについて、Nが9の場合を例にとって説明する。
[Nが9の場合]
Nが9の場合は、要件2から、Mの取り得る値には、3〜8がある。以下、Nが9の場合における第2検出回路グループの6つの例である例1〜6について説明する。
[Nが9、Mが6の場合]
Nが9、Mが6の場合、要件3から、Gの取り得る値は3以上84以下である。第1検出回路グループ(1,2,3,4,5,6)は、Gが3の場合に構成される3個の第1検出回路グループのうちの1つである。また、この場合、要件4から、mの取り得る値は2以上5以下である。mが2の場合、要件5,6を満たすgの値は3以上15以下であり、要件5A,6Aを満たすgの値は6以上15以下である。gが3で、要件1〜6を満たす場合における、第1検出回路グループ(1,2,3,4,5,6)内に構成される3個の第2検出回路グループの例としては、下記の例1がある。
例1:(1,2)、(3,4)、(5,6)
また、gが6で、要件1〜4,5A,6Aを満たす場合における、第1検出回路グループ(1,2,3,4,5,6)内に構成される6個の第2検出回路グループの例としては、下記の例2がある。
例2:(1,2)、(2,3)、(3,4)、(4,5)、(5,6)、(6,1)
[Nが9、Mが7の場合]
Nが9、Mが7の場合、要件3から、Gの取り得る値は5以上36以下である。第1検出回路グループ(1,2,3,4,5,6,7)は、Gが5の場合に構成される5個の第1検出回路グループのうちの1つである。また、この場合、要件4から、mの取り得る値は、2以上6以下である。mが3の場合、要件5,6を満たすgの値は3以上35以下であり、要件5A,6Aを満たすgの値は7以上35以下である。gが3で、要件1〜6を満たす場合における、第1検出回路グループ(1,2,3,4,5,6,7)内に構成される3個の第2検出回路グループの例としては、下記の例3がある。
例3:(1,2,3)、(4,5,6)、(7,1,2)
また、gが7で、要件1〜4,5A,6Aを満たす場合における、第1検出回路グループ(1,2,3,4,5,6,7)内に構成される7個の第2検出回路グループの例としては、下記の例4がある。
例4:(1,2,3)、(2,3,4)、(3,4,5)、(4,5,6)、(5,6,7)、(6,7,1)、(7,1,2)
[Nが9、Mが8の場合]
Nが9、Mが8の場合、要件3から、Gの取り得る値は9だけである。第1検出回路グループ(1,2,3,4,5,6,7,8)は、Gが9の場合に構成される9個の第1検出回路グループのうちの1つである。また、この場合、要件4から、mの取り得る値は2以上7以下である。mが4の場合、要件5,6を満たすgの値は2以上70以下であり、要件5A,6Aを満たすgの値は8以上70以下である。gが2で、要件1〜6を満たす場合における、第1検出回路グループ(1,2,3,4,5,6,7,8)内に構成される2個の第2検出回路グループの例としては、下記の例5がある。
例5:(1,2,3,4)、(5,6,7,8)
また、gが8で、要件1〜4,5A,6Aを満たす場合における、第1検出回路グループ(1,2,3,4,5,6,7,8)内に構成される8個の第2検出回路グループの例としては、下記の例6がある。
例6:(1,2,3,4)、(2,3,4,5)、(3,4,5,6)、(4,5,6,7)、(5,6,7,8)、(6,7,8,1)、(7,8,1,2)、(8,1,2,3)
本実施の形態に係る回転磁界センサ1および角度決定方法では、N個の検出回路のうちの1つが故障しても、故障した検出回路が属さない第1検出回路グループが1つ以上存在する。この故障した検出回路が属さない第1検出回路グループは、それに属するg個の第2検出回路グループに対応するg個の角度値の全てが所定の大きさの角度範囲内に含まれることで、判別することができる。この性質を利用して、本実施の形態では、1つ以上の正常な第1検出回路グループを抽出し、1つ以上の正常な第1検出回路グループに属する全ての第2検出回路グループに対応する全ての角度値のうちの少なくとも1つに基づいて角度検出値θsを決定する。これにより、本実施の形態によれば、複数の検出回路のうちの1つが故障しても正しい角度検出値θsを出力することが可能になる。
更に、本実施の形態に係る回転磁界センサ1によれば、故障検出部80によって、N個の検出回路のうちの1つが故障した場合に、故障した1つの検出回路を特定することが可能になる。同様に、本実施の形態に係る角度決定方法によれば、第3の手順S103によって、N個の検出回路のうちの1つが故障した場合に、故障した1つの検出回路を特定することが可能になる。
ところで、故障した検出回路の出力信号は、その検出回路が正常であるときの出力信号とは異なったものとなる。しかし、出力信号を監視することによって検出回路の故障を検出する方法では、検出回路の故障を感度よく検出することができない。すなわち、この方法では、予め決められた正常値に対する検出回路の出力信号のずれ量が比較的小さい態様の検出回路の故障を検出することが難しい。
これに対し、本実施の形態では、それぞれm個の検出回路の出力信号に基づいて算出された複数の角度値に基づいて、故障した検出回路を特定する。予め決められた正常値に対する検出回路の出力信号のずれ量が比較的小さい態様の検出回路の故障の場合であっても、角度値は、比較的顕著に、正常時に比べて変化する。そのため、本実施の形態によれば、出力信号を監視することによって検出回路の故障を検出する方法に比べて、検出回路の故障を感度よく検出することができる。
[第2の実施の形態]
次に、図10を参照して、本発明の第2の実施の形態に係る回転磁界センサについて説明する。図10は、本実施の形態に係る回転磁界センサの一部の構成を示す回路図である。本実施の形態では、第1の検出回路10は、ホイートストンブリッジ回路14および差分検出器15の代わりに、ハーフブリッジ回路16を有している。ハーフブリッジ回路16は、直列に接続された一対のMR素子R111,R112を含んでいる。MR素子R111のMR素子R112とは反対側の端部は、電源ポートV1に接続されている。MR素子R112のMR素子R111とは反対側の端部は、グランドポートG1に接続されている。第1の出力信号S1は、MR素子R111とMR素子R112の接続点J1から出力される。
また、第2の検出回路20は、ホイートストンブリッジ回路24および差分検出器25の代わりに、ハーフブリッジ回路26を有している。ハーフブリッジ回路26は、直列に接続された一対のMR素子R121,R122を含んでいる。MR素子R121のMR素子R122とは反対側の端部は、電源ポートV2に接続されている。MR素子R122のMR素子R121とは反対側の端部は、グランドポートG2に接続されている。第2の出力信号S2は、MR素子R121とMR素子R122の接続点J2から出力される。
また、第3の検出回路30は、ホイートストンブリッジ回路34および差分検出器35の代わりに、ハーフブリッジ回路36を有している。ハーフブリッジ回路36は、直列に接続された一対のMR素子R131,R132を含んでいる。MR素子R131のMR素子R132とは反対側の端部は、電源ポートV3に接続されている。MR素子R132のMR素子R131とは反対側の端部は、グランドポートG3に接続されている。第3の出力信号S3は、MR素子R131とMR素子R132の接続点J3から出力される。
また、第4の検出回路40は、ホイートストンブリッジ回路44および差分検出器45の代わりに、ハーフブリッジ回路46を有している。ハーフブリッジ回路46は、直列に接続された一対のMR素子R141,R142を含んでいる。MR素子R141のMR素子R142とは反対側の端部は、電源ポートV4に接続されている。MR素子R142のMR素子R141とは反対側の端部は、グランドポートG4に接続されている。第4の出力信号S4は、MR素子R141とMR素子R142の接続点J4から出力される。
MR素子R111,R112,R121,R122,R131,R132,R141,R142の構成は、それぞれ、第1の実施の形態におけるMR素子R11,R12,R21,R22,R31,R32,R41,R42の構成と同じである。すなわち、第1の検出回路10では、MR素子R111における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第1の方向D1(−X方向)と同じ方向であり、MR素子R112における磁化固定層の磁化の方向は、MR素子R111における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第1の方向D1との相対角度に応じて、接続点J1の電位が変化する。
第2の検出回路20では、MR素子R121における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第2の方向D2と同じ方向であり、MR素子R122における磁化固定層の磁化の方向は、MR素子R121における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第2の方向D2との相対角度に応じて、接続点J2の電位が変化する。
第3の検出回路30では、MR素子R131における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第3の方向D3(−Y方向)と同じ方向であり、MR素子R132における磁化固定層の磁化の方向は、MR素子R131における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第3の方向D3との相対角度に応じて、接続点J3の電位が変化する。
第4の検出回路40では、MR素子R141における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第4の方向D4と同じ方向であり、MR素子R142における磁化固定層の磁化の方向は、MR素子R141における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第4の方向D4との相対角度に応じて、接続点J4の電位が変化する。
本実施の形態では、第1の実施の形態における図4に示した第1の角度計算回路61の2つの入力端は、第1の検出回路10の接続点J1と第2の検出回路20の接続点J2に接続されている。第2の角度計算回路62の2つの入力端は、第2の検出回路20の接続点J2と第3の検出回路30の接続点J3に接続されている。第3の角度計算回路63の2つの入力端は、第3の検出回路30の接続点J3と第4の検出回路40の接続点J4に接続されている。第4の角度計算回路64の2つの入力端は、第4の検出回路40の接続点J4と第1の検出回路10の接続点J1に接続されている。第5の角度計算回路65の2つの入力端は、第3の検出回路30の接続点J3と第1の検出回路10の接続点J1に接続されている。第6の角度計算回路66の2つの入力端は、第4の検出回路40の接続点J4と第2の検出回路20の接続点J2に接続されている。
本実施の形態におけるその他の構成、作用および効果は、第1の実施の形態と同様である。
[第3の実施の形態]
次に、図11を参照して、本発明の第3の実施の形態に係る回転磁界センサについて説明する。図11は、本実施の形態に係る回転磁界センサの一部の構成を示す回路図である。本実施の形態に係る回転磁界センサ1は、第1の実施の形態におけるホイートストンブリッジ回路14,24,34,44の代わりに、2つのホイートストンブリッジ回路5,6を備えている。回転磁界センサ1は、更に、電源ポートV5,V6と、グランドポートG5,G6とを備えている。
ホイートストンブリッジ回路5は、直列に接続された第1の対のMR素子R51,R52と、直列に接続された第2の対のMR素子R53,R54とを含んでいる。MR素子R51のMR素子R52とは反対側の端部は、MR素子R53のMR素子R54とは反対側の端部と電源ポートV5に接続されている。MR素子R52のMR素子R51とは反対側の端部は、MR素子R54のMR素子R53とは反対側の端部とグランドポートG5に接続されている。電源ポートV5とグランドポートG5との間には、所定の電圧が印加される。これにより、MR素子R51,R52の互いに反対側の端部間と、MR素子R53,R54の互いに反対側の端部間に、所定の電圧が印加される。
ホイートストンブリッジ回路6は、直列に接続された第1の対のMR素子R61,R62と、直列に接続された第2の対のMR素子R63,R64とを含んでいる。MR素子R61のMR素子R62とは反対側の端部は、MR素子R63のMR素子R64とは反対側の端部と電源ポートV6に接続されている。MR素子R62のMR素子R61とは反対側の端部は、MR素子R64のMR素子R63とは反対側の端部とグランドポートG6に接続されている。電源ポートV6とグランドポートG6との間には、所定の電圧が印加される。これにより、MR素子R61,R62の互いに反対側の端部間と、MR素子R63,R64の互いに反対側の端部間に、所定の電圧が印加される。
本実施の形態では、第1の検出回路10は、MR素子R51,R52によって構成されている。第2の検出回路20は、MR素子R53,R54によって構成されている。第3の検出回路30は、MR素子R61,R62によって構成されている。第4の検出回路40は、MR素子R63,R64によって構成されている。第1の出力信号S1は、MR素子R51とMR素子R52の接続点J51から出力される。第2の出力信号S2は、MR素子R53とMR素子R54の接続点J52から出力される。第3の出力信号S3は、MR素子R61とMR素子R62の接続点J61から出力される。第4の出力信号S4は、MR素子R63とMR素子R64の接続点J62から出力される。
MR素子R51,R52,R53,R54,R61,R62,R63,R64の構成は、それぞれ、第1の実施の形態におけるMR素子R11,R12,R21,R22,R31,R32,R41,R42の構成と同じである。すなわち、第1の検出回路10では、MR素子R51における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第1の方向D1(−X方向)と同じ方向であり、MR素子R52における磁化固定層の磁化の方向は、MR素子R51における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第1の方向D1との相対角度に応じて、接続点J51の電位が変化する。
第2の検出回路20では、MR素子R53における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第2の方向D2と同じ方向であり、MR素子R54における磁化固定層の磁化の方向は、MR素子R53における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第2の方向D2との相対角度に応じて、接続点J52の電位が変化する。
第3の検出回路30では、MR素子R61における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第3の方向D3(−Y方向)と同じ方向であり、MR素子R62における磁化固定層の磁化の方向は、MR素子R61における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第3の方向D3との相対角度に応じて、接続点J61の電位が変化する。
第4の検出回路40では、MR素子R63における磁化固定層の磁化の方向は、第1の実施の形態における図2に示した第4の方向D4と同じ方向であり、MR素子R64における磁化固定層の磁化の方向は、MR素子R63における磁化固定層の磁化の方向とは反対の方向である。この場合、回転磁界MFの方向DMと第4の方向D4との相対角度に応じて、接続点J62の電位が変化する。
本実施の形態では、第1の実施の形態における図4に示した第1の角度計算回路61の2つの入力端は、ホイートストンブリッジ回路5の接続点J51,52に接続されている。第2の角度計算回路62の2つの入力端は、ホイートストンブリッジ回路5の接続点J52とホイートストンブリッジ回路6の接続点J61に接続されている。第3の角度計算回路63の2つの入力端は、ホイートストンブリッジ回路6の接続点J61,62に接続されている。第4の角度計算回路64の2つの入力端は、ホイートストンブリッジ回路6の接続点J62とホイートストンブリッジ回路5の接続点J51に接続されている。第5の角度計算回路65の2つの入力端は、ホイートストンブリッジ回路6の接続点J61とホイートストンブリッジ回路5の接続点J51に接続されている。第6の角度計算回路66の2つの入力端は、ホイートストンブリッジ回路6の接続点J62とホイートストンブリッジ回路5の接続点J52に接続されている。
本実施の形態におけるその他の構成、作用および効果は、第1の実施の形態と同様である。
[第4の実施の形態]
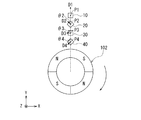
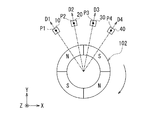
次に、図12を参照して、本発明の第4の実施の形態に係る回転磁界センサについて説明する。図12は、本実施の形態に係る回転磁界センサの構成を示す説明図である。図12には、方向が回転する回転磁界を発生する手段の例として、1組以上のN極とS極が交互にリング状に配列された磁石102を示している。図12に示した例では、磁石102は、2組のN極とS極とを含んでいる。本実施の形態に係る回転磁界センサ1は、磁石102の外周部から発生する回転磁界の方向を検出する。図12に示した例では、図12における紙面がXY平面となり、紙面に垂直な方向がZ方向となる。磁石102のN極とS極は、Z方向に平行な回転中心を中心として対称な位置に配置されている。磁石102は、回転中心を中心として回転する。これにより、磁石102が発生する磁界に基づいて、回転磁界が発生される。回転磁界は、回転中心(Z方向)を中心として回転する。図12に示した例では、磁石102は時計回り方向に回転し、回転磁界は反時計回り方向に回転する。
本実施の形態では、第1の検出回路10が回転磁界を検出する位置である第1の位置P1、第2の検出回路20が回転磁界を検出する位置である第2の位置P2、第3の検出回路30が回転磁界を検出する位置である第3の位置P3、および第4の検出回路40が回転磁界を検出する位置である第4の位置P4を、磁石102の回転方向について同じ位置としている。すなわち、本実施の形態では、第1ないし第4の検出回路10〜40は、磁石102の回転方向について同じ位置に配置されている。
図12に示した例では、第1の検出回路10が生成する第1の出力信号S1が最大となる回転磁界の方向である第1の方向D1を、磁石102の半径方向に設定している。第2の検出回路20が生成する第2の出力信号S2が最大となる回転磁界の方向である第2の方向D2は、XY平面内において、第1の方向D1から、反時計回り方向にθ2だけ回転した方向である。第3の検出回路30が生成する第3の出力信号S3が最大となる回転磁界の方向である第3の方向D3は、XY平面内において、第1の方向D1から、反時計回り方向にθ3だけ回転した方向である。第4の検出回路40が生成する第4の出力信号S4が最大となる回転磁界の方向である第4の方向D4は、XY平面内において、第1の方向D1から、反時計回り方向にθ4だけ回転した方向である。本実施の形態では特に、θ2、θ3、θ4は、それぞれ、45°、90°、135°である。
図12に示した回転磁界センサ1のその他の構成は、第1ないし第3のいずれかの実施の形態と同様である。
[変形例]
次に、図13を参照して、本実施の形態における変形例について説明する。図13は、本実施の形態における変形例の回転磁界センサの構成を示す説明図である。図13には、方向が回転する回転磁界を発生する手段の例として、複数組のN極とS極が交互に直線状に配列された磁石103を示している。変形例における回転磁界センサ1は、磁石103の外周部から発生する回転磁界の方向を検出する。図13に示した例では、図13における紙面がXY平面となり、紙面に垂直な方向がZ方向となる。磁石103は、対象物の直線的な運動に連動して、その長手方向に直線的に移動する。これにより、磁石103が発生する磁界に基づいて、回転磁界が発生される。回転磁界は、Z方向を中心として回転する。
図13に示した例では、第1の方向D1を、XY平面内において、磁石103の移動方向に直交する方向に設定している。第2の方向D2は、XY平面内において、第1の方向D1から、反時計回り方向にθ2すなわち45°だけ回転した方向である。第3の方向D3は、XY平面内において、第1の方向D1から、反時計回り方向にθ3すなわち90°だけ回転した方向である。第4の方向D4は、XY平面内において、第1の方向D1から、反時計回り方向にθ4すなわち135°だけ回転した方向である。図13に示した回転磁界センサ1のその他の構成は、図12に示した回転磁界センサ1と同様である。
なお、図12および図13では、便宜上、第1ないし第4の検出回路10〜40をY方向に離間させて描いている。しかし、第1ないし第4の検出回路10〜40のY方向の位置は、互いに近いことが好ましく、一致していることがより好ましい。
本実施の形態におけるその他の構成、作用および効果は、第1ないし第3のいずれかの実施の形態と同様である。
[第5の実施の形態]
次に、図14を参照して、本発明の第5の実施の形態に係る回転磁界センサについて説明する。図14は、本実施の形態に係る回転磁界センサの構成を示す説明図である。本実施の形態に係る回転磁界センサ1は、第4の実施の形態における図12に示した例と同様に、磁石102の外周部から発生する回転磁界の方向を検出する。本実施の形態に係る回転磁界センサ1では、第1の検出回路10が回転磁界を検出する位置である第1の位置P1、第2の検出回路20が回転磁界を検出する位置である第2の位置P2、第3の検出回路30が回転磁界を検出する位置である第3の位置P3、および第4の検出回路40が回転磁界を検出する位置である第4の位置P4を、磁石102の回転方向について互いに異なる位置としている。すなわち、本実施の形態では、第1ないし第4の検出回路10〜40は、磁石102の回転方向について異なる位置に配置されている。
図14に示した例では、磁石102は、2組のN極とS極とを含み、磁石102が1回転する間に、回転磁界は2回転する。この場合、第1ないし第4の出力信号S1〜S4における1周期すなわち電気角の360°は、磁石102の1/2回転すなわち磁石102の回転角の180°に相当する。図14では、第1の位置P1と第2の位置P2のずれ、第2の位置P2と第3の位置P3のずれ、第3の位置P3と第4の位置P4のずれは、いずれも、電気角の45°、すなわち磁石102の回転角の22.5°である。また、第1の位置P1と第3の位置P3のずれは、電気角の90°、すなわち磁石102の回転角の45°であり、第1の位置P1と第4の位置P4のずれは、電気角の135°、すなわち磁石102の回転角の67.5°である。
また、図14に示した例では、第1の検出回路10が生成する第1の出力信号S1が最大となる回転磁界の方向である第1の方向D1、第2の検出回路20が生成する第2の出力信号S2が最大となる回転磁界の方向である第2の方向D2、第3の検出回路30が生成する第3の出力信号S3が最大となる回転磁界の方向である第3の方向D3、第4の検出回路40が生成する第4の出力信号S4が最大となる回転磁界の方向である第4の方向D4を、いずれも磁石102の半径方向に設定している。図14に示した回転磁界センサ1のその他の構成は、第1ないし第3のいずれかの実施の形態と同様である。
[変形例]
次に、図15を参照して、本実施の形態における変形例について説明する。図15は、本実施の形態における変形例の回転磁界センサの構成を示す説明図である。変形例の回転磁界センサ1は、第4の実施の形態における図13に示した例と同様に、磁石103の外周部から発生する回転磁界の方向を検出する。図15に示した例では、磁石103が、1ピッチ分すなわちN極とS極の1組分だけ移動すると回転磁界が1回転する。この場合、第1ないし第4の出力信号S1〜S4における1周期すなわち電気角の360°は、磁石103の1ピッチに相当する。図15では、第1の位置P1と第2の位置P2のずれ、第2の位置P2と第3の位置P3のずれ、第3の位置P3と第4の位置P4のずれは、いずれも1/8ピッチである。また、第1の位置P1と第3の位置P3のずれは、1/4ピッチであり、第1の位置P1と第4の位置P4のずれは、3/8ピッチである。
図15に示した例では、第1ないし第4の方向D1〜D4を、いずれも、XY平面内において、磁石103の移動方向に直交する方向に設定している。図15に示した回転磁界センサ1のその他の構成は、図14に示した回転磁界センサ1と同様である。
本実施の形態におけるその他の構成、作用および効果は、第1ないし第4のいずれかの実施の形態と同様である。
なお、本発明は、上記各実施の形態に限定されず、種々の変更が可能である。例えば、各実施の形態における第1ないし第4の検出回路10〜40の配置や第1ないし第4の方向D1〜D4は一例であり、第1ないし第4の検出回路10〜40の配置と第1ないし第4の方向D1〜D4は、特許請求の範囲に記載された要件を満たす範囲内で種々の変更が可能である。
また、第2ないし第5の実施の形態では、回転磁界センサ1は第1ないし第4の検出回路10〜40の代わりに、第1の実施の形態においてM,G,m,gの取り得る値を説明する際に示した例に従うN個の検出回路を備えていてもよい。
また、本発明における磁気検出素子は、磁気検出素子を含む検出回路が回転磁界MFの方向DMに対応した出力信号を出力することができるものであれば、スピンバルブ型のMR素子(GMR素子、TMR素子)に限られない。例えば、磁気検出素子としては、AMR素子、ホール素子、フラックスゲート型磁気センサ等を用いることもできる。