JP2011258925A5 - - Google Patents
Download PDFInfo
- Publication number
- JP2011258925A5 JP2011258925A5 JP2011058279A JP2011058279A JP2011258925A5 JP 2011258925 A5 JP2011258925 A5 JP 2011258925A5 JP 2011058279 A JP2011058279 A JP 2011058279A JP 2011058279 A JP2011058279 A JP 2011058279A JP 2011258925 A5 JP2011258925 A5 JP 2011258925A5
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- unit
- processed
- substrate processing
- positioning mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Description
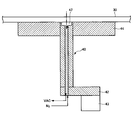
図6に示すように、回転部40は、回転伝達部42を介してモータ43が設けられており、載置された基板30を回転させることができる。また、回転部40において基板30が載置される面には、基板吸着部となる真空チャック部44が設けられており、不図示の真空ポンプ等に接続されている。真空チャック部44には気体開口部47が設けられており、真空チャック部44における真空チャックは、基板30を真空チャック部44に載置した後、真空ポンプ等により排気することにより、気体開口部47に基板30が吸着されることにより行われる。また、真空チャック部44においては、気体開口部47より窒素(N2)ガス等を基板30側に供給すること(窒素ガスブロー)により、真空チャック部44上において基板30を浮上させることも可能である。
この際、ノズル部140には第1のノズル141を基板30の半径方向に移動させるためのモータ142が設けられており、ノズル部160には第2のノズル161を基板30の半径方向に移動させるためのモータ162が設けられている。これらの第1のノズル141及び第2のノズル161は、後述する基板位置決め装置により得られた基板30の直径等の情報に基づいて決定された位置に、モータ142及びモータ162により、配置される。この際、ノズル駆動部となるモータ142及びモータ162は、ノズル駆動制御部170の制御により、第1のノズル141及び第2のノズル161を移動させる。これにより基板の大きさに依存することなく所望のベベル処理を確実に行うことができる。
また、本実施の形態における基板処理装置では、図5に示すように、ブラシユニット150を有しており、ブラシユニット150による処理を行うことができる。このブラシユニット150は、基板30に接触して処理を行う円柱形のスポンジ等により形成されたブラシ部151、ブラシ部151を回転させるためのブラシ用モータ152を有し、ブラシ部151及びブラシ用モータ152を含むブラシユニット本体部153を移動させることのできる第1のモータ154及び第2のモータ155を有している。そして、このブラシユニット150は、ドレインカップ110とトッププレート120とが閉じた状態で、基板30の処理を行う。第1のモータ154は、基板30の表面に対し平行方向にブラシユニット本体部153を移動させることができるものであり、ブラシ部151の基板30に対する水平方向の位置を調整することができる。よって、第1のモータ154により、基板30の処理がなされる領域を定めることができる。また、第2のモータ155は、基板30の表面に対し垂直方向にブラシユニット本体部153を移動させることができるものであり、ブラシ部151の基板30に対する高さを調整することができる。よって、第2のモータ155により、ブラシ部151が所望の押圧力で基板30の処理を行うことができる所定の高さに調整することができる。本実施の形態では、後述する基板位置決め装置により得られた基板30の直径の情報に基づいて第1のモータ154を制御し、基板30の大きさに対応して、ブラシ部151を所望の位置に移動させることができる。これにより、ブラシ部151による基板30の処理を最適な位置で行うことができ、所望の処理を行うことができる。
この際、ピン15を中心に第1の基準部11を動かし、後述する基準基板81の側面の2点と接触する位置に合わせ、ネジ16により固定することにより、第1の基準部11と基準基板81とを確実に2点で接触させることができる。また、支持部12の他方の端は、第1の駆動部13に接続されている。第1の駆動部13は、第1の基準部11を基板30の半径方向に直線的に移動させることができるものであって、所定の位置で停止させることができる位置制御可能なモータにより構成されている。例えば、位置制御を比較的正確に行うことが可能なステッピングモータ等が好ましい。
更に、本実施の形態では、第1の位置決め機構部10、第2の位置決め機構部20、回転部40、真空チャック部44において基板30を真空チャックするための不図示の真空ポンプ及び真空ポンプと真空チャック部44の接続状態を切り替えるバルブ45、窒素ガス等を供給するためのバルブ46等は、制御部50と接続されており、制御部50により、これらの制御を行うことができる。また、制御部50は、外部記憶部60と接続されており、外部記憶部60には、制御部50において制御を行うプログラムが格納されている。尚、制御部50内には、第1の位置決め機構部10、第2の位置決め機構部20及び回転部40等の制御を行う駆動制御部51、基準位置等の情報を記憶するための記憶部52、各種算出動作を行う演算部53、基板の処理を実際に行う基板処理部等に計測された基板の情報を送信する送信部54を有している。
次に、ステップ114(S114)において、基板30の中心を回転中心41に合わせる補正をするための補正値を演算部53において算出する。即ち、ステップ112において算出した基板30の直径の実測値をもとに、真空チャック部44上に載置されている基板30を現状の位置より移動させる距離となる補正値を算出する。具体的には、ステップ112において、300.2mmと算出された場合には、基準基板81よりも0.2mm大きいため、補正値は+0.2mmの半分の+0.1mmとなる。また、299.8mmと算出された場合には、基準基板81よりも0.2mm小さいため、補正値は−0.2mmの半分の−0.1mmとなる。
次に、ステップ118(S118)において、ステップ114で得られた補正値に基づいて駆動制御部51が真空チャック部44上に載置されている基板30の位置補正を行う。具体的には、補正値が+0.1mmの場合、基板30の中心は回転部40の回転中心41よりも、第2の位置決め機構部20側に0.1mmずれているため、駆動制御部51が、第1の位置決め機構部10の第1の駆動部13により、第1の基準部11を回転中心41より離れる方向に、0.1mm移動させる。これにより、基板30は第2の基準部21におけるバネ部26により、連結部29と接触部24を介し第1の位置決め機構部10側に押され、基板30の中心と回転中心41とが一致した状態とすることができる。また、補正値が、−0.1mmの場合、基板30の中心は回転部40の回転中心41よりも、第1の位置決め機構部10側に0.1mmずれているため、駆動制御部51が、第1の位置決め機構部10の第1の駆動部13により、第1の基準部11を回転中心41に近づく方向に、0.1mm移動させる。これにより、基板30の側面が第1の基準部11の接触面14を介して押され、第2の位置決め機構部20におけるバネ部26が縮むため、基板30を第2の位置決め機構部20側に移動させることができ、これにより基板30の中心と回転中心41とが一致した状態とすることができる。
次に、ステップ120(S120)において、基板30を真空チャック部44に吸着させる。具体的には、ステップ118において、基板30の中心と回転部40における回転中心とが一致している状態となった後、窒素ガスのブローを停止し、真空チャック部44に接続されている真空ポンプ等により排気を行い真空チャック部44に設けられた気体開口部47を介し基板30を真空チャック部44に吸着させる。この後、第1の位置決め機構部10において、第1の駆動部13により、第1の基準部11を回転中心41より離れる方向に移動させることにより、基板30の側面と第1の基準部11の接触面14とが接触していない状態とし、同様に、第2の位置決め機構部20において、第2の駆動部23により、第2の基準部21を回転中心41より離れる方向に移動させることにより、基板30の側面と第2の基準部21の接触部24とが接触していない状態とする。これにより、基板30の中心と回転部40の回転中心41とが一致した状態で真空チャック部44に基板30を吸着させることができる。
次に、ステップ124(S124)において、基板30に対して処理を行う。具体的には、第1のノズル141と第2のノズル161による基板30のベベル処理を行う。第1のノズル141と第2のノズル161には、予め基準基板の端部から処理幅だけ内側に入った位置にノズル位置が設定されている。基板30のベベル処理は、送信部54により送信された基板30の実測値及び補正値に基づいて、予め設定されていたノズル位置からその補正値分だけノズル位置を調整して行われる。すなわち、ノズル駆動制御部170が、第1のノズル141をノズル用モータ142により所定の位置まで移動させ、第2のノズル161をノズル用モータ162により所定の位置まで移動させる。具体的には、基板30のベベル処理を行う処理幅が、基板30の端部より3mmである場合、第1のノズル141のノズル位置は予め基準基板81の端部から3mm内側の位置に設定されている。実測された基板30の直径が300.2mmであれば、第1の位置決め機構10の補正値が+0.1mmであることから、基板30の中心と回転中心41とを合わせた時に、基板30の端部は基準基板81の端部より0.1mmだけ外側に位置することになる。そのため、第1のノズル141を、第1の位置決め機構と同様に、設定されたノズル位置から回転中心41より離れる方向に0.1mm移動させる。また、実測された基板30の直径が299.8mmであれば、第1の位置決め機構10の補正値が−0.1mmであることから、基板30の中心と回転中心41とを合わせた時に、基板30の端部は基準基板81の端部より0.1mmだけ回転中心側に位置することになる。そのため、第1のノズル141を、第1の位置決め機構と同様に、設定されたノズル位置から回転中心に近づく方向に0.1mm移動させる。第2のノズル161についても、第1のノズル141と同様に、処理幅に合わせて予め設定されたノズル位置から、第1の位置決め機構の補正値分だけ移動させる。これにより、第1のノズル141及び第2のノズル161は、基板30の実際の大きさに関わらず、基板30の端部から所望の処理幅だけ離れた位置に正確に移動することができ、処理幅をそろえることができる。この後、第1のノズル141及び第2のノズル161より薬液を供給し、ベベル処理を行う。
Claims (22)
- 被処理基板に処理流体を供給して基板処理を行う基板処理部と、
前記被処理基板の側面に接触させ、前記被処理基板の位置を定める位置決め機構部と、
前記位置決め機構部を駆動する位置決め駆動部と、
前記位置決め機構部の位置を検出する検出部と、
前記被処理基板の基準となる基準基板に対する前記位置決め機構部の位置を基準位置情報として記憶する記憶部と、
前記基準位置情報と前記検出部において検出された前記位置決め機構部の位置情報との差を算出し、前記差より前記被処理基板の実測情報を算出する演算部と、
を有することを特徴とする基板処理装置。 - 前記演算部において算出された前記実測情報を前記基板処理部へ送る送信部を有することを特徴とする請求項1に記載の基板処理装置。
- 前記送信部は、前記実測情報を複数の前記基板処理部へ送信するものであることを特徴とする特徴とする請求項2に記載の基板処理装置。
- 前記基板処理部は、前記被処理基板の処理を行う流体を供給するためのノズルと、
前記ノズルを前記被処理基板面に沿って移動させるノズル駆動部と、
前記演算部の情報に基づいて、前記ノズルが所定の位置に移動するように前記ノズル駆動部を制御するノズル駆動制御部と、を有することを特徴とする請求項1から3のいずれかに記載の基板処理装置。 - 前記ノズルは、前記被処理基板のベベル部に処理液を供給し、ベベル処理を行うものであることを特徴とする請求項4に記載の基板処理装置。
- 前記ノズルは、前記被処理基板の中心部より周辺部に、または、前記基板の周辺部より中心部に移動させるものであることを特徴とする請求項4または5に記載の基板処理装置。
- 前記演算部の情報に基づいて前記位置決め駆動部を駆動させ、前記被処理基板を所定の位置に移動させるように前記位置決め駆動部を制御する位置決め駆動制御部を有することを特徴とする請求項1から6のいずれかに記載の基板処理装置。
- 前記実測情報は、前記被処理基板の直径の情報であることを特徴とする請求項1から7のいずれかに記載の基板処理装置。
- 前記基板処理部と前記位置決め機構部は、異なるユニット内に設けられていることを特徴とする請求項1から8のいずれかに記載の基板処理装置。
- 前記基板処理部と前記位置決め機構部は、1つのユニット内に設けられていることを特徴とする請求項1から8のいずれかに記載の基板処理装置。
- 前記位置決め機構部は、
前記被処理基板の側面と接触する第1の基準部と、前記第1の基準部を移動させるための第1の駆動部とを有する第1の位置決め機構部と、
前記被処理基板の側面と接触する第2の基準部と、前記第2の基準部を移動させるための第2の駆動部とを有する第2の位置決め機構部と、
を有することを特徴とする請求項1から10のいずれかに記載の基板処理装置。 - 前記第1の基準部は、前記被処理基板の側面に2点以上で接触するように形成されていることを特徴とする請求項11に記載の基板処理装置。
- 前記第2の基準部は、前記被処理基板の側面に1点で接触する接触部と、前記接触部を前記第2の基準部が移動する方向に力を加えることのできる弾性部と、を有することを特徴とする請求項11または12に記載の基板処理装置。
- 前記接触部は略円形の形状を有しており、前記円形の中心を軸に回転可能な状態で前記第2の基準部に設置されていることを特徴とする請求項13に記載の基板処理装置。
- 被処理基板に処理流体を供給して基板処理を行う基板処理方法において、
基準基板についての基準基板情報を記憶する基準基板情報記憶工程と、
基板載置部上に前記被処理基板を載置する基板載置工程と、
前記被処理基板を位置決め機構部に接触させて、前記位置決め機構部の位置を検出する検出工程と、
前記検出工程で検出された位置情報と、前記基準基板情報とに基づき、前記被処理基板の実測情報を算出する算出工程と、
を有することを特徴とする基板処理方法。 - 算出された前記被処理基板の実測情報を基板処理部に送信する送信工程を有することを特徴とする請求項15に記載の基板処理方法。
- 前記送信工程で受信された前記被処理基板の実測情報に基づき、基板処理部内におけるノズルを所定の位置に移動させ、前記ノズルより処理流体を供給することにより基板処理を行う基板処理工程を有することを特徴とする請求項16に記載の基板処理方法。
- 前記基準基板情報記憶工程は、
前記基準基板の中心と前記基板載置部の中心とが一致するように、前記基板載置部上に前記基準基板を載置する工程と、
第1の基準部と前記基準基板の側面とを接触させ、さらに、第2の基準部と前記基準基板の側面とを接触させて、前記位置決め機構部の基準位置を決定する基準基板位置決定工程と、
前記基準位置を前記基準基板情報として記憶する記憶工程と、
を有することを特徴とする請求項15から17のいずれかに記載の基板処理方法。 - 前記検出工程は、前記第1の基準部と前記被処理基板の側面とを接触させ、更に、前記第2の基準部と前記被処理基板の側面とを接触させ、検出部により前記第2の基準部の位置を検出するものであることを特徴とする請求項15から18のいずれかに記載の基板処理方法。
- 前記算出工程は、前記検出工程において検出された値と、前記基準基板情報とに基づき、前記被処理基板の直径を算出することを特徴とする請求項15から19のいずれかに記載の基板処理方法。
- 前記基板載置工程、前記検出工程、前記算出工程を繰り返し行うことにより、複数の被処理基板の位置決めを行うことを特徴とする請求項15から20のいずれかに記載の基板処理方法。
- コンピュータに請求項15から20のいずれかに記載の基板処理方法を実行させるためのプログラムを記録したコンピュータ読取り可能な記憶媒体。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011058279A JP5449239B2 (ja) | 2010-05-12 | 2011-03-16 | 基板処理装置、基板処理方法及びプログラムを記録した記憶媒体 |
| KR1020110031859A KR101590660B1 (ko) | 2010-05-12 | 2011-04-06 | 기판 처리 장치, 기판 처리 방법 및 프로그램을 기록한 기억 매체 |
| TW100115603A TWI478273B (zh) | 2010-05-12 | 2011-05-04 | 基板處理裝置、基板處理方法及記錄有程式之記憶媒體 |
| US13/104,331 US9257313B2 (en) | 2010-05-12 | 2011-05-10 | Substrate processing and positioning apparatus, substrate processing and positioning method and storage medium recording program for processing and positioning a substrate |
| CN201110125636.5A CN102244023B (zh) | 2010-05-12 | 2011-05-12 | 基板处理装置及基板处理方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010110367 | 2010-05-12 | ||
| JP2010110367 | 2010-05-12 | ||
| JP2011058279A JP5449239B2 (ja) | 2010-05-12 | 2011-03-16 | 基板処理装置、基板処理方法及びプログラムを記録した記憶媒体 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2011258925A JP2011258925A (ja) | 2011-12-22 |
| JP2011258925A5 true JP2011258925A5 (ja) | 2013-04-04 |
| JP5449239B2 JP5449239B2 (ja) | 2014-03-19 |
Family
ID=44912132
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011058279A Active JP5449239B2 (ja) | 2010-05-12 | 2011-03-16 | 基板処理装置、基板処理方法及びプログラムを記録した記憶媒体 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9257313B2 (ja) |
| JP (1) | JP5449239B2 (ja) |
| KR (1) | KR101590660B1 (ja) |
| CN (1) | CN102244023B (ja) |
| TW (1) | TWI478273B (ja) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5572575B2 (ja) * | 2010-05-12 | 2014-08-13 | 東京エレクトロン株式会社 | 基板位置決め装置、基板処理装置、基板位置決め方法及びプログラムを記録した記憶媒体 |
| JP5243491B2 (ja) * | 2010-06-18 | 2013-07-24 | 東京エレクトロン株式会社 | 位置決め装置、基板処理装置及び基準部材の固定方法 |
| CN102339781B (zh) * | 2011-09-28 | 2016-09-07 | 上海华虹宏力半导体制造有限公司 | 一种晶圆固定装置及其使用方法 |
| JP5729326B2 (ja) * | 2012-02-14 | 2015-06-03 | 東京エレクトロン株式会社 | 液処理装置、液処理方法及び記憶媒体 |
| CN103811290A (zh) * | 2012-11-13 | 2014-05-21 | 沈阳芯源微电子设备有限公司 | 一种液体喷洒回收装置 |
| JP6113624B2 (ja) * | 2013-10-11 | 2017-04-12 | 株式会社荏原製作所 | 基板処理装置および基板処理方法 |
| US10095114B2 (en) | 2014-11-14 | 2018-10-09 | Applied Materials, Inc. | Process chamber for field guided exposure and method for implementing the process chamber |
| JP6680040B2 (ja) * | 2016-03-30 | 2020-04-15 | 東京エレクトロン株式会社 | 基板処理装置、液処理方法、及び記憶媒体 |
| US9964863B1 (en) | 2016-12-20 | 2018-05-08 | Applied Materials, Inc. | Post exposure processing apparatus |
| JP6811951B2 (ja) * | 2017-02-03 | 2021-01-13 | 株式会社ディスコ | 搬送機構 |
| JP6842952B2 (ja) | 2017-02-28 | 2021-03-17 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| CN110226217B (zh) | 2017-02-28 | 2023-07-07 | 株式会社斯库林集团 | 基板处理装置以及基板处理方法 |
| JP6920849B2 (ja) * | 2017-03-27 | 2021-08-18 | 株式会社荏原製作所 | 基板処理方法および装置 |
| JP6847770B2 (ja) | 2017-05-31 | 2021-03-24 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| KR102363113B1 (ko) * | 2018-03-01 | 2022-02-15 | 가부시키가이샤 에바라 세이사꾸쇼 | 스케줄러, 기판 처리 장치, 및 기판 반송 방법 |
| CN113196452A (zh) | 2019-01-18 | 2021-07-30 | 应用材料公司 | 用于电场引导的光刻胶图案化工艺的膜结构 |
| CN109928212A (zh) * | 2019-04-09 | 2019-06-25 | 深圳市华星光电半导体显示技术有限公司 | 显示面板定位设备 |
| JP7290988B2 (ja) * | 2019-04-26 | 2023-06-14 | キヤノントッキ株式会社 | アライメント装置、成膜装置、アライメント方法、成膜方法および電子デバイスの製造方法 |
| JP7297558B2 (ja) * | 2019-06-28 | 2023-06-26 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| US11429026B2 (en) | 2020-03-20 | 2022-08-30 | Applied Materials, Inc. | Lithography process window enhancement for photoresist patterning |
| US20210320027A1 (en) * | 2020-04-09 | 2021-10-14 | Applied Materials, Inc. | Systems and methods for substrate support temperature control |
| CN112768393A (zh) * | 2021-02-02 | 2021-05-07 | 沈阳芯源微电子设备股份有限公司 | 校准装置、对准系统及对准方法 |
| KR102611146B1 (ko) * | 2021-06-28 | 2023-12-06 | 세메스 주식회사 | 기판 처리 장치의 예열 방법 및 이를 위한 컴퓨터 프로그램 |
Family Cites Families (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0637170A (ja) * | 1992-07-15 | 1994-02-10 | Fujitsu Ltd | ウェーハアライメント方法及び装置 |
| TW319751B (ja) * | 1995-05-18 | 1997-11-11 | Toshiba Co Ltd | |
| JPH1089904A (ja) * | 1996-09-17 | 1998-04-10 | Hitachi Electron Eng Co Ltd | Vノッチウェハ位置決め装置 |
| US6032512A (en) * | 1998-06-02 | 2000-03-07 | Taiwan Semiconductor Manufacturing Co. Ltd. | Wafer centering device and method of using |
| TW505822B (en) * | 1999-06-09 | 2002-10-11 | Tokyo Electron Ltd | Developing method and developing apparatus |
| JP2002015984A (ja) * | 2000-04-27 | 2002-01-18 | Toshiba Corp | 成膜方法 |
| JP3545676B2 (ja) * | 2000-05-10 | 2004-07-21 | 東京エレクトロン株式会社 | 現像処理装置及び現像処理方法 |
| KR100811964B1 (ko) * | 2000-09-28 | 2008-03-10 | 동경 엘렉트론 주식회사 | 레지스트 패턴 형성장치 및 그 방법 |
| JP4547524B2 (ja) * | 2000-12-05 | 2010-09-22 | 川崎重工業株式会社 | ワーク処理方法、ワーク処理装置およびロボット |
| JP2002353423A (ja) * | 2001-05-25 | 2002-12-06 | Canon Inc | 板部材の分離装置及び処理方法 |
| JP4389424B2 (ja) * | 2001-12-25 | 2009-12-24 | 東京エレクトロン株式会社 | 被処理体の搬送機構及び処理システム |
| JP4173309B2 (ja) * | 2002-01-28 | 2008-10-29 | 東京エレクトロン株式会社 | センタリング装置及び枚葉式検査装置 |
| US20030168175A1 (en) * | 2002-03-08 | 2003-09-11 | Kim Kyung-Tae | Substrate alignment apparatus |
| JP3956350B2 (ja) * | 2002-03-25 | 2007-08-08 | 東京エレクトロン株式会社 | 位置決め機能を有する基板処理装置及び位置決め機能を有する基板処理方法 |
| US6700090B2 (en) * | 2002-04-26 | 2004-03-02 | Hitachi High-Technologies Corporation | Plasma processing method and plasma processing apparatus |
| US7367773B2 (en) * | 2002-05-09 | 2008-05-06 | Maxtor Corporation | Apparatus for combining or separating disk pairs simultaneously |
| US7499767B2 (en) * | 2003-02-20 | 2009-03-03 | Applied Materials, Inc. | Methods and apparatus for positioning a substrate relative to a support stage |
| JP2004342939A (ja) | 2003-05-16 | 2004-12-02 | Shimada Phys & Chem Ind Co Ltd | 基板処理装置 |
| WO2005055312A1 (ja) * | 2003-12-04 | 2005-06-16 | Hirata Corporation | 基板位置決めシステム |
| KR101003666B1 (ko) * | 2003-12-10 | 2010-12-23 | 엘지디스플레이 주식회사 | 정렬장치 |
| JP4069081B2 (ja) * | 2004-01-13 | 2008-03-26 | 東京エレクトロン株式会社 | 位置調整方法及び基板処理システム |
| JP2005262367A (ja) * | 2004-03-18 | 2005-09-29 | Tokyo Electron Ltd | 搬送ロボットの搬送ズレ確認方法及び処理装置 |
| JP5291281B2 (ja) * | 2004-06-28 | 2013-09-18 | 株式会社渡辺商行 | 浮上搬送装置及び浮上搬送方法 |
| JP4324527B2 (ja) * | 2004-09-09 | 2009-09-02 | 東京エレクトロン株式会社 | 基板洗浄方法及び現像装置 |
| JP4490780B2 (ja) * | 2004-10-07 | 2010-06-30 | 大日本スクリーン製造株式会社 | 基板処理装置および基板処理方法 |
| JP4502199B2 (ja) * | 2004-10-21 | 2010-07-14 | ルネサスエレクトロニクス株式会社 | エッチング装置およびエッチング方法 |
| US7547181B2 (en) * | 2004-11-15 | 2009-06-16 | Dainippon Screen Mfg. Co., Ltd. | Substrate position correcting method and apparatus using either substrate radius or center of rotation correction adjustment sum |
| JP4222997B2 (ja) * | 2004-11-15 | 2009-02-12 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP4312145B2 (ja) * | 2004-11-15 | 2009-08-12 | 大日本スクリーン製造株式会社 | 基板位置補正装置および基板位置補正方法 |
| JP4601452B2 (ja) * | 2005-02-22 | 2010-12-22 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP2006237479A (ja) * | 2005-02-28 | 2006-09-07 | Mitsubishi Heavy Ind Ltd | プラズマ処理装置 |
| CN101733696A (zh) * | 2005-04-19 | 2010-06-16 | 株式会社荏原制作所 | 基板抛光方法及处理方法 |
| JP4757126B2 (ja) * | 2005-10-11 | 2011-08-24 | 東京エレクトロン株式会社 | 基板処理方法及び基板処理装置 |
| JP4657090B2 (ja) | 2005-11-17 | 2011-03-23 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP4781802B2 (ja) * | 2005-12-06 | 2011-09-28 | 東京応化工業株式会社 | サポートプレートの貼り合わせ手段及び貼り合わせ装置、並びにサポートプレートの貼り合わせ方法 |
| JP4961895B2 (ja) * | 2006-08-25 | 2012-06-27 | 東京エレクトロン株式会社 | ウェハ搬送装置、ウェハ搬送方法及び記憶媒体 |
| JP2008060302A (ja) * | 2006-08-31 | 2008-03-13 | Sokudo:Kk | 基板処理装置 |
| US7673582B2 (en) * | 2006-09-30 | 2010-03-09 | Tokyo Electron Limited | Apparatus and method for removing an edge bead of a spin-coated layer |
| JP5030542B2 (ja) * | 2006-11-10 | 2012-09-19 | 株式会社日立ハイテクノロジーズ | 真空処理装置 |
| JP4428717B2 (ja) * | 2006-11-14 | 2010-03-10 | 東京エレクトロン株式会社 | 基板処理方法及び基板処理システム |
| JP2008173744A (ja) * | 2007-01-22 | 2008-07-31 | Tokyo Electron Ltd | 搬送システムの搬送位置合わせ方法 |
| CN101276774B (zh) * | 2007-03-28 | 2010-04-07 | 沈阳芯源先进半导体技术有限公司 | 晶片自动定位控制装置及其控制方法 |
| JP4900117B2 (ja) * | 2007-07-30 | 2012-03-21 | 東京エレクトロン株式会社 | 現像装置、現像方法及び記憶媒体 |
| JP5133641B2 (ja) * | 2007-09-27 | 2013-01-30 | 東京エレクトロン株式会社 | 塗布処理方法、塗布処理装置及びコンピュータ読み取り可能な記憶媒体 |
| JP2009130011A (ja) | 2007-11-21 | 2009-06-11 | Atel Corp | 基板位置決め装置 |
| JP4926933B2 (ja) | 2007-12-14 | 2012-05-09 | 東京エレクトロン株式会社 | 基板洗浄装置および基板洗浄方法 |
| JP4922915B2 (ja) * | 2007-12-28 | 2012-04-25 | 大日本スクリーン製造株式会社 | 基板処理装置および基板の芯合わせ方法 |
| EP2267766A4 (en) * | 2008-03-17 | 2013-04-24 | Tokyo Electron Ltd | CONTROL DEVICE AND CONTROL METHOD |
| KR20090126854A (ko) * | 2008-06-05 | 2009-12-09 | 삼성전자주식회사 | 어레이 헤드형 잉크젯 화상형성장치 및 그 정렬 에러 보상방법 |
| CN101802982B (zh) * | 2008-06-05 | 2012-05-23 | 东京毅力科创株式会社 | 液体处理装置和液体处理方法 |
| KR101041872B1 (ko) * | 2008-11-26 | 2011-06-16 | 세메스 주식회사 | 노즐 및 이를 이용한 기판 처리 장치 및 방법 |
| JP5301505B2 (ja) * | 2009-08-27 | 2013-09-25 | 東京エレクトロン株式会社 | 液処理装置および液処理方法 |
| JP5572575B2 (ja) * | 2010-05-12 | 2014-08-13 | 東京エレクトロン株式会社 | 基板位置決め装置、基板処理装置、基板位置決め方法及びプログラムを記録した記憶媒体 |
| JP5243491B2 (ja) * | 2010-06-18 | 2013-07-24 | 東京エレクトロン株式会社 | 位置決め装置、基板処理装置及び基準部材の固定方法 |
| JP5729326B2 (ja) * | 2012-02-14 | 2015-06-03 | 東京エレクトロン株式会社 | 液処理装置、液処理方法及び記憶媒体 |
-
2011
- 2011-03-16 JP JP2011058279A patent/JP5449239B2/ja active Active
- 2011-04-06 KR KR1020110031859A patent/KR101590660B1/ko active IP Right Grant
- 2011-05-04 TW TW100115603A patent/TWI478273B/zh active
- 2011-05-10 US US13/104,331 patent/US9257313B2/en active Active
- 2011-05-12 CN CN201110125636.5A patent/CN102244023B/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011258925A5 (ja) | ||
| JP2011258924A5 (ja) | ||
| JP5449239B2 (ja) | 基板処理装置、基板処理方法及びプログラムを記録した記憶媒体 | |
| US9008817B2 (en) | Substrate positioning apparatus, substrate processing apparatus, substrate positioning method, and computer readable medium having a program stored thereon | |
| CN107529670B (zh) | 基板处理装置和方法 | |
| TWI375293B (en) | Method to position a wafer | |
| US20180218935A1 (en) | Substrate transport device, detection position calibration method and substrate processing apparatus | |
| TWI544554B (zh) | A bonding device and a bonding position adjusting method using the bonding device | |
| US20160322248A1 (en) | Substrate position alignment device and control method of substrate position alignment device | |
| US20100319209A1 (en) | Alignment apparatus and alignment method | |
| JP2006222190A (ja) | ウェハのアライナー装置 | |
| US11658146B2 (en) | Bonding apparatus, bonding system, bonding method, and recording medium | |
| KR101423811B1 (ko) | 위치 결정 장치, 기판 처리 장치 및 기준 부재의 고정 방법 | |
| TW201839824A (zh) | 周緣處理裝置及周緣處理方法 | |
| CN111312644A (zh) | 晶圆自动对位装置以及刻蚀机 | |
| CN103632932B (zh) | 基片装卸装置、等离子体设备和机械手坐标零点定位方法 | |
| JP4777317B2 (ja) | ウエーハ搬送方法 | |
| TWI705518B (zh) | 基板處理裝置、及基板處理方法 | |
| KR20110096341A (ko) | 기판 정렬 장치 및 방법 | |
| KR102041314B1 (ko) | 이송 유닛 | |
| TW202401641A (zh) | 搬送裝置以及位置資訊的記憶方法 | |
| TW202401651A (zh) | 定心裝置、定心方法以及基板處理裝置 | |
| JP2016020821A (ja) | 回路基板検査装置における被検査回路基板の平坦化矯正機構 | |
| JP3903723B2 (ja) | 導電性ボールの搭載方法 | |
| JP2014096544A (ja) | 部品実装装置、部品実装装置による部品の実装方法及びプログラム |