JP2010197015A - 自動製氷機の駆動ユニット - Google Patents
自動製氷機の駆動ユニット Download PDFInfo
- Publication number
- JP2010197015A JP2010197015A JP2009045367A JP2009045367A JP2010197015A JP 2010197015 A JP2010197015 A JP 2010197015A JP 2009045367 A JP2009045367 A JP 2009045367A JP 2009045367 A JP2009045367 A JP 2009045367A JP 2010197015 A JP2010197015 A JP 2010197015A
- Authority
- JP
- Japan
- Prior art keywords
- ice
- making machine
- automatic
- unit
- drive unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D23/00—General constructional features
- F25D23/12—Arrangements of compartments additional to cooling compartments; Combinations of refrigerators with other equipment, e.g. stove
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25C—PRODUCING, WORKING OR HANDLING ICE
- F25C2400/00—Auxiliary features or devices for producing, working or handling ice
- F25C2400/10—Refrigerator units
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25C—PRODUCING, WORKING OR HANDLING ICE
- F25C2400/00—Auxiliary features or devices for producing, working or handling ice
- F25C2400/14—Water supply
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25C—PRODUCING, WORKING OR HANDLING ICE
- F25C2600/00—Control issues
- F25C2600/04—Control means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25C—PRODUCING, WORKING OR HANDLING ICE
- F25C2700/00—Sensing or detecting of parameters; Sensors therefor
- F25C2700/02—Level of ice
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25C—PRODUCING, WORKING OR HANDLING ICE
- F25C2700/00—Sensing or detecting of parameters; Sensors therefor
- F25C2700/12—Temperature of ice trays
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D2400/00—General features of, or devices for refrigerators, cold rooms, ice-boxes, or for cooling or freezing apparatus not covered by any other subclass
- F25D2400/40—Refrigerating devices characterised by electrical wiring
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D2700/00—Means for sensing or measuring; Sensors therefor
- F25D2700/02—Sensors detecting door opening
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F25—REFRIGERATION OR COOLING; COMBINED HEATING AND REFRIGERATION SYSTEMS; HEAT PUMP SYSTEMS; MANUFACTURE OR STORAGE OF ICE; LIQUEFACTION SOLIDIFICATION OF GASES
- F25D—REFRIGERATORS; COLD ROOMS; ICE-BOXES; COOLING OR FREEZING APPARATUS NOT OTHERWISE PROVIDED FOR
- F25D29/00—Arrangement or mounting of control or safety devices
Abstract
【解決手段】自動製氷機1の駆動ユニット5において、ユニットケース9には、自動製氷機1の製氷皿や検氷部材を駆動する駆動部50、および製氷皿や検氷部材の位置を検出する位置検出装置55が収納されているとともに、駆動部50のモータ13を制御する制御部6もユニットケース9に収納されている。製氷皿2の温度を検出するサーミスタ7に接続された配線70は、ユニットケース9内に接続され、製氷皿2に水を供給する給水ポンプ11に接続された配線14は、ユニットケース9内に接続されている。
【選択図】 図2
Description
(自動製氷機の基本構成)
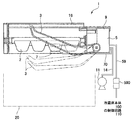
図1は、本発明を適用した自動製氷機の構成を示す説明図である。図1に示す自動製氷機1は、製氷や離氷等を自動的に行なう装置であり、冷蔵庫の製氷室内に設置される。自動製氷機1は、貯氷部20の上方に配置された製氷皿2と、貯氷部20内の貯氷量を検知するためのレバー状の検氷部材3と、製氷皿2に水を供給するための給水ポンプ11(給液装置)と、製氷皿2および検氷部材3を連動させて駆動する駆動ユニット5とを有している。また、自動製氷機1は、製氷皿2の温度を検出して製氷が終了したか否かを監視するためのサーミスタ7を備えている。
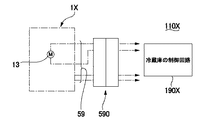
図2は、本発明を適用した自動製氷機の駆動ユニットと冷蔵庫本体との電気的な接続などを示す説明図である。
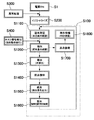
図3は、本発明を適用した自動製氷機1の基本動作を示すブロック図である。本形態の自動製氷機1において、制御部6は、マイクロコンピュータ、メモリ、タイマーなどにより構成されており、予めメモリに格納された動作プログラムに基づいて、図3を参照して説明する以下の工程を実行させる。
以上説明したように、本形態の自動製氷機1の駆動ユニット5において、駆動部50および位置検出装置55が収容されたユニットケース9には、制御部6も収容されている。このため、自動製氷機1側と冷蔵庫本体100側との間では、多数の制御信号の授受を行なう必要がない。また、自動製氷機1が搭載されていない冷蔵庫に自動製氷機1を組み込む場合や、既設の自動製氷機1を仕様の異なる自動製氷機1に交換する場合、冷蔵庫本体100に搭載されていた制御回路110については変更する必要がなく、冷蔵庫本体100の制御回路110を変更せずに、自動製氷機1の取り付けや交換を行なうことができる。
(駆動部の構成)
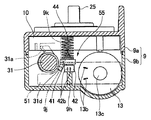
図4は、図1に示す自動製氷機の駆動ユニットにおいて、ユニットケースを構成する一方のケース部材を取り外して、駆動ユニットの内部構成を示す正面図である。図5は、図4に示す駆動ユニットの駆動輪列の連結関係を示す断面展開図である。図6は、図4の矢示IV−IV断面図である。
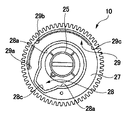
図7は、図5に示す駆動ユニットに用いたカム車を矢示V方向から見た底面図である。図4および図7に示すカム車10は、駆動源となるモータ13により回転させられる。カム車10には、出力軸25が一体成形されている。出力軸25は、ケース部材9aに設けられた孔から駆動ユニット5の外方に突出し、製氷皿2に連結されている。従って、カム車10と製氷皿2とは、一体となって回転する。出力軸25の製氷皿2に連結されていない側の端部は、筒状となっており、ケース部材9bに設けられた円形の台部9gに回転自在に支持されている。
図8は、図4に示す駆動ユニットの検氷軸の正面図である。図9は、図4に示す駆動ユニットの押圧部材を矢示VII方向から見た底面図である。図4に示すように、出力軸25の端部外周面には、筒状のフリクション部材8がフリクション状態で遊嵌配置されている。フリクション部材8の外周面には、製氷位置方向(製氷皿2から氷を落下させる離氷位置方向とは反対側への回転方向)への駆動時に、検氷位置において検氷軸31の回転を阻止する回動阻止片(図示省略)が設けられ、回動阻止片は、カム車10と共にフリクション部材8が製氷位置方向に回動すると、図8に示す検氷軸31の係合片31bと係合する位置へ移動し、係合片31bと係合する。このため、検氷軸31は、製氷位置方向への駆動時、カム車10の検氷軸用カム面28の氷不足検出位置部28c(図7参照)に係合凸部31aが対向しても、上述の回動阻止片によって、その回動を阻止されるため、そのカム面形状に従って回動することはない。従って、検氷軸31が検氷位置にあっても、検氷軸31に形成されたスイッチ押圧動作阻止片31dは、押圧スイッチ42を押圧する押圧部材41の回動を阻止できず、押圧スイッチ42がオンとなる。すなわち、離氷動作後の製氷皿2の回転時においては、検氷位置で押圧部材41がコイルスプリング44の付勢力を受けて揺動し、押圧スイッチ42が貯氷部20内の氷の量に関係なく必ずオンとなる。
(基本動作)
図10は本発明を適用した自動製氷機の駆動ユニットで行なわれる基本動作の具体的な内容を示すフローチャートである。
図11は、本発明を適用した自動製氷機の駆動ユニットで行なわれる異常処理の具体的内容を示すフローチャートである。
2 製氷皿
3 検氷部材
5 駆動ユニット
7 サーミスタ
9 ユニットケース
10 カム車
11 給水ポンプ(給液装置)
13 モータ
50 駆動部
55 位置検出装置
100 冷蔵庫本体
Claims (3)
- 製氷皿および検氷部材を駆動するためのモータを備えた駆動部と、
前記製氷皿および前記検氷部材の位置を検出する位置検出装置と、
前記位置検出装置の検出信号に基づいて前記モータの駆動を制御する制御部と、
前記制御部、前記駆動部および前記位置検出装置が収容されたユニットケースと、
を有することを特徴とする自動製氷機の駆動ユニット。 - 前記製氷皿の温度を検出するサーミスタに接続された配線は、前記ユニットケース内に接続され、
前記制御部は、前記位置検出装置の検出信号、および前記サーミスタの検出信号に基づいて、前記モータの駆動を制御することを特徴とする請求項1に記載の自動製氷機の駆動ユニット。 - 前記製氷皿に液体を供給する給液装置に接続された配線は、前記ユニットケース内に接続され、
前記制御部は、前記給液装置を制御することを特徴とする請求項1または2に記載の自動製氷機の駆動ユニット。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009045367A JP2010197015A (ja) | 2009-02-27 | 2009-02-27 | 自動製氷機の駆動ユニット |
| CN201010126451.1A CN101818976B (zh) | 2009-02-27 | 2010-02-23 | 自动制冰机的驱动单元 |
| US12/712,757 US8499571B2 (en) | 2009-02-27 | 2010-02-25 | Drive unit for automatic ice maker |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009045367A JP2010197015A (ja) | 2009-02-27 | 2009-02-27 | 自動製氷機の駆動ユニット |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010197015A true JP2010197015A (ja) | 2010-09-09 |
| JP2010197015A5 JP2010197015A5 (ja) | 2012-02-23 |
Family
ID=42654167
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009045367A Pending JP2010197015A (ja) | 2009-02-27 | 2009-02-27 | 自動製氷機の駆動ユニット |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8499571B2 (ja) |
| JP (1) | JP2010197015A (ja) |
| CN (1) | CN101818976B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014105946A (ja) * | 2012-11-28 | 2014-06-09 | Nidec Sankyo Corp | 製氷装置、製氷装置の装置本体、および製氷装置の製氷皿装着検知方法 |
| JP2018044727A (ja) * | 2016-09-15 | 2018-03-22 | 東芝ライフスタイル株式会社 | 自動製氷装置 |
| JP2019045044A (ja) * | 2017-08-31 | 2019-03-22 | 日本電産サンキョー株式会社 | 製氷装置およびその検査方法 |
| JP2020143833A (ja) * | 2019-03-06 | 2020-09-10 | 日本電産サンキョー株式会社 | 製氷装置 |
| JP2021014925A (ja) * | 2019-07-10 | 2021-02-12 | アイリスオーヤマ株式会社 | 冷蔵庫、及び自動製氷装置 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8893523B2 (en) * | 2010-11-22 | 2014-11-25 | General Electric Company | Method of operating a refrigerator |
| KR101913423B1 (ko) * | 2011-09-09 | 2018-12-31 | 엘지전자 주식회사 | 냉장고 |
| KR20130078531A (ko) * | 2011-12-30 | 2013-07-10 | 삼성전자주식회사 | 냉장고 |
| CN103712393B (zh) * | 2012-09-28 | 2016-04-27 | 日本电产三协株式会社 | 制冰装置 |
| CN103925733A (zh) * | 2013-01-10 | 2014-07-16 | 刘威孝 | 简易空调器 |
| US9032744B2 (en) | 2013-01-14 | 2015-05-19 | General Electric Company | Ice maker for a refrigerator appliance and a method for operating the same |
| CN103851877B (zh) * | 2014-02-28 | 2016-01-20 | 海信容声(广东)冰箱有限公司 | 一种冰箱自动制冰机系统的控制方法 |
| US9482456B2 (en) * | 2014-09-24 | 2016-11-01 | Hani Toma | Automatic turning ice block apparatus and method |
| CN104729176A (zh) * | 2015-03-25 | 2015-06-24 | 青岛海尔股份有限公司 | 一种制冰装置及包含有该制冰装置的冰箱 |
| JP6902435B2 (ja) * | 2017-08-31 | 2021-07-14 | 日本電産サンキョー株式会社 | 製氷装置 |
| JP6902436B2 (ja) * | 2017-08-31 | 2021-07-14 | 日本電産サンキョー株式会社 | 製氷装置用駆動ユニットおよび製氷装置 |
| JP6889637B2 (ja) * | 2017-08-31 | 2021-06-18 | 日本電産サンキョー株式会社 | 製氷装置 |
| CN110081641A (zh) * | 2019-05-09 | 2019-08-02 | 广东奥马冰箱有限公司 | 一种自动制冰机储冰盒结构 |
| US11543166B2 (en) | 2020-03-31 | 2023-01-03 | Electrolux Home Products, Inc. | Ice maker |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002181421A (ja) * | 2001-11-13 | 2002-06-26 | Sankyo Seiki Mfg Co Ltd | 自動製氷機 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07122539B2 (ja) * | 1989-11-16 | 1995-12-25 | 株式会社東芝 | 自動製氷装置付冷蔵庫 |
| US5735130A (en) * | 1995-11-30 | 1998-04-07 | Samsung Electronics Co., Ltd. | Ice removal motor control circuit and method for an automatic ice maker |
| KR970047507A (ko) * | 1995-12-27 | 1997-07-26 | 김광호 | 자동제빙기의 이빙모터 제어방법 |
| JP3086649B2 (ja) | 1996-01-17 | 2000-09-11 | 株式会社三協精機製作所 | 自動製氷機の駆動装置 |
| JP3909190B2 (ja) | 2000-04-25 | 2007-04-25 | 日本電産サンキョー株式会社 | 自動製氷機の駆動装置 |
| KR100826019B1 (ko) * | 2006-10-20 | 2008-04-28 | 엘지전자 주식회사 | 제빙장치 |
| CN101158527B (zh) * | 2007-10-29 | 2010-11-24 | 刘勇 | 制冰装置及其控制方法 |
-
2009
- 2009-02-27 JP JP2009045367A patent/JP2010197015A/ja active Pending
-
2010
- 2010-02-23 CN CN201010126451.1A patent/CN101818976B/zh active Active
- 2010-02-25 US US12/712,757 patent/US8499571B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002181421A (ja) * | 2001-11-13 | 2002-06-26 | Sankyo Seiki Mfg Co Ltd | 自動製氷機 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014105946A (ja) * | 2012-11-28 | 2014-06-09 | Nidec Sankyo Corp | 製氷装置、製氷装置の装置本体、および製氷装置の製氷皿装着検知方法 |
| JP2018044727A (ja) * | 2016-09-15 | 2018-03-22 | 東芝ライフスタイル株式会社 | 自動製氷装置 |
| JP2019045044A (ja) * | 2017-08-31 | 2019-03-22 | 日本電産サンキョー株式会社 | 製氷装置およびその検査方法 |
| JP2020143833A (ja) * | 2019-03-06 | 2020-09-10 | 日本電産サンキョー株式会社 | 製氷装置 |
| WO2020179445A1 (ja) * | 2019-03-06 | 2020-09-10 | 日本電産サンキョー株式会社 | 製氷装置 |
| JP2021014925A (ja) * | 2019-07-10 | 2021-02-12 | アイリスオーヤマ株式会社 | 冷蔵庫、及び自動製氷装置 |
| JP7373181B2 (ja) | 2019-07-10 | 2023-11-02 | アイリスオーヤマ株式会社 | 冷蔵庫、及び自動製氷装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101818976B (zh) | 2014-01-01 |
| US8499571B2 (en) | 2013-08-06 |
| US20100218524A1 (en) | 2010-09-02 |
| CN101818976A (zh) | 2010-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2010197015A (ja) | 自動製氷機の駆動ユニット | |
| US20100319385A1 (en) | Cam mechanism and ice making device | |
| JP3582706B2 (ja) | 自動製氷機の駆動装置および自動製氷機ならびに冷蔵庫 | |
| JP3827272B2 (ja) | 自動製氷機の駆動装置及びこの装置の製造方法 | |
| JP2001165537A (ja) | 自動製氷機の駆動装置 | |
| JPH11316070A (ja) | 製氷装置および製氷装置の強制駆動方法 | |
| JP3296967B2 (ja) | 自動製氷機の駆動装置 | |
| JP3547354B2 (ja) | 自動製氷機の駆動装置およびこの装置の製造方法 | |
| JP6088225B2 (ja) | 製氷装置、製氷装置の装置本体、および製氷装置の製氷皿装着検知方法 | |
| JP3672177B2 (ja) | 自動製氷機の駆動装置 | |
| JP5243333B2 (ja) | 家庭用電気製品 | |
| KR20010062149A (ko) | 자동제빙기의 구동장치 | |
| JP3879808B2 (ja) | 自動製氷機の駆動装置 | |
| JPH08313132A (ja) | 自動製氷機の駆動装置 | |
| JP3879808B6 (ja) | 自動製氷機の駆動装置 | |
| JP3540882B2 (ja) | 自動製氷機の駆動装置 | |
| JP2013155926A (ja) | 自動製氷機および自動製氷機ユニット | |
| JP3306618B2 (ja) | 自動製氷機 | |
| JP2567551Y2 (ja) | カップ搬出装置 | |
| JP2010236785A (ja) | 自動製氷装置 | |
| JP3385204B2 (ja) | 自動製氷機の駆動方法 | |
| JP2011094811A (ja) | 製氷装置 | |
| JP2000088413A (ja) | 製氷装置 | |
| JP2006122148A (ja) | 便器装置 | |
| JP2023008039A (ja) | アイスディスペンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120110 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120110 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130319 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130716 |