JP2007190659A - ロボット遠隔操作システム - Google Patents
ロボット遠隔操作システム Download PDFInfo
- Publication number
- JP2007190659A JP2007190659A JP2006012941A JP2006012941A JP2007190659A JP 2007190659 A JP2007190659 A JP 2007190659A JP 2006012941 A JP2006012941 A JP 2006012941A JP 2006012941 A JP2006012941 A JP 2006012941A JP 2007190659 A JP2007190659 A JP 2007190659A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- information
- operator
- terminal
- operation terminal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 claims description 54
- 230000008569 process Effects 0.000 claims description 45
- 230000004044 response Effects 0.000 claims description 30
- 230000005540 biological transmission Effects 0.000 claims description 18
- 238000004891 communication Methods 0.000 description 47
- 210000001508 eye Anatomy 0.000 description 21
- 230000009471 action Effects 0.000 description 19
- 238000012423 maintenance Methods 0.000 description 17
- 210000005252 bulbus oculi Anatomy 0.000 description 16
- 210000003128 head Anatomy 0.000 description 14
- 238000012545 processing Methods 0.000 description 14
- 230000006399 behavior Effects 0.000 description 12
- 230000033001 locomotion Effects 0.000 description 9
- 210000000323 shoulder joint Anatomy 0.000 description 8
- 241000282412 Homo Species 0.000 description 6
- 210000000245 forearm Anatomy 0.000 description 6
- 230000005856 abnormality Effects 0.000 description 5
- 210000002310 elbow joint Anatomy 0.000 description 5
- 230000001419 dependent effect Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 238000003786 synthesis reaction Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 description 1
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000009118 appropriate response Effects 0.000 description 1
- 230000008933 bodily movement Effects 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 230000008921 facial expression Effects 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 239000000779 smoke Substances 0.000 description 1
Images








Abstract
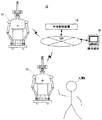
【解決手段】ロボット遠隔操作システム10は、ネットワーク100を介して接続された複数のロボット12,14、中央制御装置16および複数の操作端末18を含む。たとえば、ロボット12,14は、人間Aとコミュニケーション可能な自律制御型のロボットであり、自律制御だけでは対応困難な状況になったときなど、必要に応じてオペレータを呼び出す。ロボット12から呼び出しがあったとき、中央制御装置16は、最も適切な操作端末18を選択し、当該操作端末18に遠隔操作を依頼する。操作端末18には、ロボット12の撮影画像、当該ロボット12や対話相手の情報等とともに遠隔操作のための操作パネルが表示される。ロボット12は操作端末18からの受信した操作コマンドに基づいて自身の動作を制御する。
【選択図】図1
Description
操作端末jが要求された制約条件を全て満たすか否かを判断する。上述したように、制約条件は、操作端末jが選択されるために必ず満たさなければならない条件であり、上述のステップS31で設定される。たとえば、制約条件が言語条件である場合には、オペレータ端末情報テーブルから当該操作端末jに対応するオペレータの言語情報を読み出して、当該制約条件の言語が含まれるか否かが判定される。
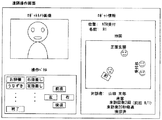
ステップS103で、表示装置に遠隔操作画面が表示される。すなわち、上述した図6に示すような、ロボットカメラ画像、ロボット情報および操作パネルを含む遠隔操作画面が表示される。なお、この時点では、当該操作端末を呼び出したロボット12のカメラ画像および当該ロボット12に関する情報は取得されていないので、ロボットカメラ画像およびロボット情報の内容の表示は無い。ステップS103を終了すると、続くステップS105からS113の処理が一定時間ごとに繰り返し実行される。
12,14 …コミュニケーションロボット
16 …中央制御装置
18 …操作端末
32 …超音波距離センサ
42 …全方位カメラ
46 …マイク
48 …眼カメラ
58 …タッチセンサ
72 …CPU
76 …メモリ
78 …モータ制御ボード
80 …センサ入力/出力ボード
82 …音声入力/出力ボード
94 …通信LANボード
96 …無線通信装置
98 …無線タグ読取装置
100 …ネットワーク
Claims (6)
- ネットワークに接続された複数のロボット、中央制御装置および複数の操作端末を含むロボット遠隔操作システムであって、
前記複数のロボットのそれぞれは、自律制御可能なロボットであり、
センサ、および
前記センサによって検出された情報に基づいて呼出条件が満足されるとき、オペレータを呼び出す要求を前記中央制御装置に送信するオペレータ呼出手段を備え、
前記中央制御装置は、
少なくとも使用状態を含む各前記操作端末に関する情報を記憶する端末情報記憶手段、
前記オペレータ呼出手段による前記要求を受信したとき、少なくとも前記端末情報記憶手段の情報に基づいて利用可能な前記操作端末を選択する選択手段、および
前記選択手段によって選択された前記操作端末および前記要求を送信した要求ロボットの少なくとも一方に、遠隔操作開始のための情報を送信する開始送信手段を備え、
前記複数の操作端末のそれぞれは、
前記開始送信手段による送信に応じて、遠隔操作のための情報を出力する第1出力手段、および
オペレータの入力に応じて操作情報を前記要求ロボットに送信する操作情報送信手段を備え、
前記複数のロボットのそれぞれは、前記操作情報送信手段による前記操作情報を受信したとき、当該操作情報に基づいて動作を制御する遠隔制御手段をさらに備える、ロボット遠隔操作システム。 - 前記中央制御装置は、各前記ロボットに関する情報を記憶するロボット情報記憶手段をさらに備え、
前記選択手段は、前記ロボット情報記憶手段に記憶された前記要求ロボットの情報と前記端末情報記憶手段の情報とに基づいて選択条件を満足する前記操作端末を選択する、請求項1記載のロボット遠隔操作システム。 - 前記ロボット情報記憶手段は、各前記ロボットの対話相手に関する情報を記憶していて、
前記端末情報記憶手段は、各前記操作端末のオペレータに関する情報を記憶していて、
前記選択手段は、前記要求ロボットの対話相手の情報と前記各操作端末のオペレータの情報とに基づいて前記選択条件を満足する前記操作端末を選択する、請求項2記載のロボット遠隔操作システム。 - 前記中央制御装置は、前記選択手段によって選択可能な前記操作端末が存在しないとき、前記要求ロボットにエラーを送信するエラー応答手段をさらに備え、
各前記ロボットは、前記エラー応答手段による前記エラーを受信したとき、エラー対応処理を実行するエラー対応手段をさらに備える、請求項1ないし3のいずれかに記載のロボット遠隔操作システム。 - 前記第1出力手段は、前記要求ロボットの前記センサによって検出された情報を含む遠隔操作画面を表示する表示手段を含む、請求項1ないし4のいずれかに記載のロボット遠隔操作システム。
- 各前記ロボットの前記センサはマイクを含み、
各前記操作端末は、前記開始送信手段による送信に応じて、前記要求ロボットの前記マイクで取得された音声を出力する音声出力手段をさらに備える、請求項1ないし5のいずれかに記載のロボット遠隔操作システム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006012941A JP4639343B2 (ja) | 2006-01-20 | 2006-01-20 | ロボット遠隔操作システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006012941A JP4639343B2 (ja) | 2006-01-20 | 2006-01-20 | ロボット遠隔操作システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007190659A true JP2007190659A (ja) | 2007-08-02 |
| JP4639343B2 JP4639343B2 (ja) | 2011-02-23 |
Family
ID=38446739
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006012941A Active JP4639343B2 (ja) | 2006-01-20 | 2006-01-20 | ロボット遠隔操作システム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4639343B2 (ja) |
Cited By (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009090420A (ja) * | 2007-10-10 | 2009-04-30 | Advanced Telecommunication Research Institute International | ロボット遠隔操作システム |
| JP2009241166A (ja) * | 2008-03-28 | 2009-10-22 | Advanced Telecommunication Research Institute International | ロボット遠隔操作システム |
| JP2010260141A (ja) * | 2009-05-08 | 2010-11-18 | Nec Corp | ロボット装置 |
| JP2012002419A (ja) * | 2010-06-16 | 2012-01-05 | Ihi Aerospace Co Ltd | 戦闘用装置 |
| JP2012133509A (ja) * | 2010-12-21 | 2012-07-12 | Mitsubishi Electric Corp | プラント監視システム |
| JP2013206237A (ja) * | 2012-03-29 | 2013-10-07 | Denso It Laboratory Inc | 自律走行ロボット及び自律走行ロボットの走行制御方法 |
| WO2014089316A1 (en) * | 2012-12-06 | 2014-06-12 | International Electronic Machines Corporation | Human augmentation of robotic work |
| JP2016068161A (ja) * | 2014-09-26 | 2016-05-09 | トヨタ自動車株式会社 | ロボット制御方法 |
| JP2017047519A (ja) * | 2015-09-04 | 2017-03-09 | Rapyuta Robotics株式会社 | クラウドロボティクスシステム、情報処理装置、プログラム、並びに、クラウドロボティクスシステムにおけるロボットの制御または支援方法 |
| JP2017119337A (ja) * | 2015-12-28 | 2017-07-06 | ヴイストン株式会社 | ロボット、ロボット制御方法およびロボットプログラム |
| JP2018027613A (ja) * | 2016-08-10 | 2018-02-22 | パナソニックIpマネジメント株式会社 | 接客装置、接客方法及び接客システム |
| JP2018067785A (ja) * | 2016-10-19 | 2018-04-26 | 前川 博文 | コミュニケーションロボットシステム |
| JP2018153875A (ja) * | 2017-03-15 | 2018-10-04 | 株式会社オカムラ | 管理システム、管理方法及びプログラム |
| JP2018165998A (ja) * | 2016-06-13 | 2018-10-25 | 日本電気株式会社 | 応対装置、応対システム、応対方法、及び記録媒体 |
| JP2019175209A (ja) * | 2018-03-29 | 2019-10-10 | 株式会社デンソー | 車両の遠隔支援システムおよび方法 |
| JP2020168040A (ja) * | 2019-04-01 | 2020-10-15 | 国立大学法人豊橋技術科学大学 | ロボット |
| JPWO2021019787A1 (ja) * | 2019-08-01 | 2021-02-04 | ||
| JP2021026479A (ja) * | 2019-08-05 | 2021-02-22 | ファナック株式会社 | アプリケーション実行用制御システム |
| JP2021062426A (ja) * | 2019-10-10 | 2021-04-22 | 沖電気工業株式会社 | ロボットシステム |
| CN112703516A (zh) * | 2018-09-18 | 2021-04-23 | 远程连接株式会社 | 预约装置、预约方法以及预约系统 |
| KR102245824B1 (ko) * | 2020-03-02 | 2021-04-28 | 주식회사 큐리보 | 복수로봇 제어시스템 및 방법 |
| WO2022138653A1 (ja) * | 2020-12-24 | 2022-06-30 | 川崎重工業株式会社 | ロボットシステム及びロボット作業方法 |
| JP2022132166A (ja) * | 2021-02-26 | 2022-09-07 | 株式会社キビテク | ロボット支援システム |
| WO2023053446A1 (ja) * | 2021-10-01 | 2023-04-06 | avatarin株式会社 | コミュニケーションシステム及びロボット |
| JP7446858B2 (ja) | 2020-03-04 | 2024-03-11 | 清水建設株式会社 | 応対制御装置、応対制御方法、及びプログラム |
| JP7477651B2 (ja) | 2020-12-24 | 2024-05-01 | 川崎重工業株式会社 | ロボットシステム及びロボット作業方法 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105835068A (zh) * | 2016-06-01 | 2016-08-10 | 小煷伴(深圳)智能科技有限公司 | 一种公共服务机器人 |
| JP7041492B2 (ja) * | 2017-10-31 | 2022-03-24 | 川崎重工業株式会社 | ロボットシステム |
| US10953541B2 (en) | 2018-07-31 | 2021-03-23 | At&T Intellectual Property I, L.P. | Providing logistical support for robots |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03191470A (ja) * | 1989-12-21 | 1991-08-21 | Toshiba Corp | 交番システム |
| JP2002254373A (ja) * | 2001-02-27 | 2002-09-10 | Casio Comput Co Ltd | ロボット遠隔制御システム、ロボット制御装置、及び、記録媒体 |
| JP2003067593A (ja) * | 2001-08-28 | 2003-03-07 | Sony Corp | 専門家サービス提供システム,専門家管理サーバ,コンピュータプログラム,記憶媒体および専門家管理サーバの運営方法 |
| JP2005326996A (ja) * | 2004-05-13 | 2005-11-24 | Fujitsu Ltd | ネットワークロボットによるサービス提供システム |
-
2006
- 2006-01-20 JP JP2006012941A patent/JP4639343B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH03191470A (ja) * | 1989-12-21 | 1991-08-21 | Toshiba Corp | 交番システム |
| JP2002254373A (ja) * | 2001-02-27 | 2002-09-10 | Casio Comput Co Ltd | ロボット遠隔制御システム、ロボット制御装置、及び、記録媒体 |
| JP2003067593A (ja) * | 2001-08-28 | 2003-03-07 | Sony Corp | 専門家サービス提供システム,専門家管理サーバ,コンピュータプログラム,記憶媒体および専門家管理サーバの運営方法 |
| JP2005326996A (ja) * | 2004-05-13 | 2005-11-24 | Fujitsu Ltd | ネットワークロボットによるサービス提供システム |
Cited By (40)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009090420A (ja) * | 2007-10-10 | 2009-04-30 | Advanced Telecommunication Research Institute International | ロボット遠隔操作システム |
| JP2009241166A (ja) * | 2008-03-28 | 2009-10-22 | Advanced Telecommunication Research Institute International | ロボット遠隔操作システム |
| JP2010260141A (ja) * | 2009-05-08 | 2010-11-18 | Nec Corp | ロボット装置 |
| JP2012002419A (ja) * | 2010-06-16 | 2012-01-05 | Ihi Aerospace Co Ltd | 戦闘用装置 |
| JP2012133509A (ja) * | 2010-12-21 | 2012-07-12 | Mitsubishi Electric Corp | プラント監視システム |
| JP2013206237A (ja) * | 2012-03-29 | 2013-10-07 | Denso It Laboratory Inc | 自律走行ロボット及び自律走行ロボットの走行制御方法 |
| WO2014089316A1 (en) * | 2012-12-06 | 2014-06-12 | International Electronic Machines Corporation | Human augmentation of robotic work |
| US9085080B2 (en) | 2012-12-06 | 2015-07-21 | International Business Machines Corp. | Human augmentation of robotic work |
| US9656387B2 (en) | 2012-12-06 | 2017-05-23 | International Electronic Machines Corp. | Human augmentation of robotic work |
| JP2016068161A (ja) * | 2014-09-26 | 2016-05-09 | トヨタ自動車株式会社 | ロボット制御方法 |
| JP2017047519A (ja) * | 2015-09-04 | 2017-03-09 | Rapyuta Robotics株式会社 | クラウドロボティクスシステム、情報処理装置、プログラム、並びに、クラウドロボティクスシステムにおけるロボットの制御または支援方法 |
| JP2017119337A (ja) * | 2015-12-28 | 2017-07-06 | ヴイストン株式会社 | ロボット、ロボット制御方法およびロボットプログラム |
| JP2022168015A (ja) * | 2016-06-13 | 2022-11-04 | 日本電気株式会社 | 応対ロボット、応対方法及びプログラム |
| US11514663B2 (en) | 2016-06-13 | 2022-11-29 | Nec Corporation | Reception apparatus, reception system, reception method, and storage medium |
| JP2018165998A (ja) * | 2016-06-13 | 2018-10-25 | 日本電気株式会社 | 応対装置、応対システム、応対方法、及び記録媒体 |
| US11430207B2 (en) | 2016-06-13 | 2022-08-30 | Nec Corporation | Reception apparatus, reception system, reception method and storage medium |
| JP7452593B2 (ja) | 2016-06-13 | 2024-03-19 | 日本電気株式会社 | 応対ロボット、応対方法及びプログラム |
| US11850728B2 (en) | 2016-06-13 | 2023-12-26 | Nec Corporation | Reception apparatus, reception system, reception method, and storage medium |
| JP2021047873A (ja) * | 2016-06-13 | 2021-03-25 | 日本電気株式会社 | 応対ロボット、応対方法及びプログラム |
| JP2018027613A (ja) * | 2016-08-10 | 2018-02-22 | パナソニックIpマネジメント株式会社 | 接客装置、接客方法及び接客システム |
| JP2018067785A (ja) * | 2016-10-19 | 2018-04-26 | 前川 博文 | コミュニケーションロボットシステム |
| JP2018153875A (ja) * | 2017-03-15 | 2018-10-04 | 株式会社オカムラ | 管理システム、管理方法及びプログラム |
| JP2019175209A (ja) * | 2018-03-29 | 2019-10-10 | 株式会社デンソー | 車両の遠隔支援システムおよび方法 |
| JP7124382B2 (ja) | 2018-03-29 | 2022-08-24 | 株式会社デンソー | 車両の遠隔支援システムおよび方法 |
| CN112703516A (zh) * | 2018-09-18 | 2021-04-23 | 远程连接株式会社 | 预约装置、预约方法以及预约系统 |
| JP7320240B2 (ja) | 2019-04-01 | 2023-08-03 | 国立大学法人豊橋技術科学大学 | ロボット |
| JP2020168040A (ja) * | 2019-04-01 | 2020-10-15 | 国立大学法人豊橋技術科学大学 | ロボット |
| WO2021019787A1 (ja) * | 2019-08-01 | 2021-02-04 | オムロン株式会社 | タスク配信装置、タスク配信システム、方法、およびプログラム |
| JP2022126658A (ja) * | 2019-08-01 | 2022-08-30 | オムロン株式会社 | 作物の栽培管理のための装置、システム、方法、およびプログラム |
| JP7331928B2 (ja) | 2019-08-01 | 2023-08-23 | オムロン株式会社 | タスク配信装置、タスク配信システム、方法、およびプログラム |
| JPWO2021019787A1 (ja) * | 2019-08-01 | 2021-02-04 | ||
| JP7381244B2 (ja) | 2019-08-05 | 2023-11-15 | ファナック株式会社 | アプリケーション実行用制御システム |
| JP2021026479A (ja) * | 2019-08-05 | 2021-02-22 | ファナック株式会社 | アプリケーション実行用制御システム |
| JP2021062426A (ja) * | 2019-10-10 | 2021-04-22 | 沖電気工業株式会社 | ロボットシステム |
| KR102245824B1 (ko) * | 2020-03-02 | 2021-04-28 | 주식회사 큐리보 | 복수로봇 제어시스템 및 방법 |
| JP7446858B2 (ja) | 2020-03-04 | 2024-03-11 | 清水建設株式会社 | 応対制御装置、応対制御方法、及びプログラム |
| WO2022138653A1 (ja) * | 2020-12-24 | 2022-06-30 | 川崎重工業株式会社 | ロボットシステム及びロボット作業方法 |
| JP7477651B2 (ja) | 2020-12-24 | 2024-05-01 | 川崎重工業株式会社 | ロボットシステム及びロボット作業方法 |
| JP2022132166A (ja) * | 2021-02-26 | 2022-09-07 | 株式会社キビテク | ロボット支援システム |
| WO2023053446A1 (ja) * | 2021-10-01 | 2023-04-06 | avatarin株式会社 | コミュニケーションシステム及びロボット |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4639343B2 (ja) | 2011-02-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4639343B2 (ja) | ロボット遠隔操作システム | |
| JP4386367B2 (ja) | コミュニケーションロボット改良システム | |
| JP5033994B2 (ja) | コミュニケーションロボット | |
| JP5070441B2 (ja) | ロボット遠隔操作システム | |
| JP4822319B2 (ja) | コミュニケーションロボットおよびそれを用いた注意制御システム | |
| JP4786519B2 (ja) | ロボットによる物体を移動するサービスに必要な情報の取得方法と該方法を用いたロボットによる物体移動サービスシステム | |
| JP7013689B2 (ja) | 遠隔操作型移動ロボットおよびロボット制御システム | |
| JP4599522B2 (ja) | コミュニケーションロボット | |
| JP7243110B2 (ja) | 情報処理装置及び情報処理方法、コンピュータプログラム、並びに荷物受け取り支援システム | |
| JP5366048B2 (ja) | 情報提供システム | |
| JP2007260822A (ja) | 道案内ロボット | |
| JP2009241166A (ja) | ロボット遠隔操作システム | |
| JP5028568B2 (ja) | ロボット制御システム | |
| JP2001191283A (ja) | ロボット装置及びその制御方法 | |
| JP2018067785A (ja) | コミュニケーションロボットシステム | |
| JP2007160473A (ja) | ロボットにおける対話相手識別方法およびロボット | |
| JP4962940B2 (ja) | 道案内システム | |
| JP2007160427A (ja) | ロボット制御システム | |
| JP2009151419A (ja) | 対象物特定方法および装置 | |
| JP2009131914A (ja) | ロボット制御システム | |
| JP2011000656A (ja) | 案内ロボット | |
| JP2002261966A (ja) | コミュニケーション支援システムおよび撮影装置 | |
| JP2007152444A (ja) | 自走式ロボットおよび情報管理システム | |
| JP2007260864A (ja) | コミュニケーションロボット | |
| JP4517085B2 (ja) | ロボット遠隔制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081215 |
|
| TRDD | Decision of grant or rejection written | ||
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101028 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20101102 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20101105 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4639343 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131210 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |