JP2004016136A - 電動リール - Google Patents
電動リール Download PDFInfo
- Publication number
- JP2004016136A JP2004016136A JP2002177303A JP2002177303A JP2004016136A JP 2004016136 A JP2004016136 A JP 2004016136A JP 2002177303 A JP2002177303 A JP 2002177303A JP 2002177303 A JP2002177303 A JP 2002177303A JP 2004016136 A JP2004016136 A JP 2004016136A
- Authority
- JP
- Japan
- Prior art keywords
- spool
- tension
- duty ratio
- diameter
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004804 winding Methods 0.000 claims description 88
- 238000003860 storage Methods 0.000 claims description 21
- 238000012937 correction Methods 0.000 claims description 8
- 238000001514 detection method Methods 0.000 claims description 7
- 238000004364 calculation method Methods 0.000 claims description 5
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 abstract description 31
- 230000008859 change Effects 0.000 abstract description 14
- 238000000034 method Methods 0.000 description 82
- 230000008569 process Effects 0.000 description 82
- 238000013500 data storage Methods 0.000 description 38
- 238000012545 processing Methods 0.000 description 23
- 230000007423 decrease Effects 0.000 description 13
- 230000003247 decreasing effect Effects 0.000 description 13
- 238000003825 pressing Methods 0.000 description 6
- 230000009467 reduction Effects 0.000 description 5
- 238000011946 reduction process Methods 0.000 description 5
- 241000251468 Actinopterygii Species 0.000 description 4
- 241000226585 Antennaria plantaginifolia Species 0.000 description 3
- 235000014676 Phragmites communis Nutrition 0.000 description 3
- 238000013459 approach Methods 0.000 description 3
- 241000276420 Lophius piscatorius Species 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000012840 feeding operation Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000004040 coloring Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
Images













Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/015—Reels with a rotary drum, i.e. with a rotating spool
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K89/00—Reels
- A01K89/015—Reels with a rotary drum, i.e. with a rotating spool
- A01K89/017—Reels with a rotary drum, i.e. with a rotating spool motor-driven
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K91/00—Lines
- A01K91/20—Line length or depth measuring devices
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
Abstract
【解決手段】電動リールは、釣り竿に装着されるリールであって、リール本体とスプールとモータと変更スイッチとPWM駆動回路と張力データ記憶エリアとリール制御部とを備えている。変更スイッチは張力を複数段階で設定するためのスイッチである。PWM駆動回路は、デューティ比が変化するパルス幅変調信号でモータを駆動する。張力データ記憶エリアには、各段階の張力に応じたデューティ比のデータが糸巻径毎に記憶されている。リール制御部は、水深表示のためのデータから糸巻径を算出し、算出された糸巻径と設定された張力の段階とにより張力データ記憶エリアからデューティ比のデータを読み出しPWM駆動回路をオープンループ制御する。
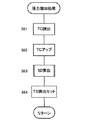
【選択図】 図10
Description
【発明の属する技術分野】
本発明は、電動リール、特に釣り竿に装着されモータで釣り糸を巻き取る電動リールに関する。
【0002】
【従来の技術】
一般に、巻き上げ時のスプールの回転をモータで行う電動リールは、たとえば、50m以上の水深を回遊する魚を船の上から釣るときによく使用される。この種の電動リールは、リール本体と、リール本体に装着されたスプールと、スプールを回転させるハンドルと、スプールを巻き上げ方向に回転させるモータとを備えている。リール本体の上面には、水深等を表示するディスプレイや各種の入力等を行うスイッチが設けられた操作パネルが装着されている。
【0003】
このような電動リールでは、従来、巻き上げ速度ではなく釣り糸の張力を複数の段階に予め設定し、設定された段階のいずれかに張力を維持するものが知られている。張力は一般に巻き上げトルクに応じて変化するが、糸巻径が異なると巻き上げトルクを一定にしても張力が変化する。そこで、従来は、糸巻径に応じて巻き上げトルクを補正して張力を一定に維持している。このように、釣り糸に作用する張力を一定に保つことにより、ドラグの設定や魚種によって生じることがあるハリス切れや口切れを防止できる。
【0004】
従来、張力を一定に維持するために、張力に応じた電流値を測定してその値を各段階の目標値として設定している。具体的には、釣り糸の先端に張力測定装置を装着し、所定の張力毎にモータに電流を流し、スプールの糸巻胴部の胴径と最大糸巻径とにおいてモータが止まる寸前にモータに流れる電流値を測定する。そして、胴径部と最大糸巻径とで流れた電流値をもとにその間の糸巻径の電流値をそれぞれ算出して各段階を電流値を求め、求められた電流値を目標値として電流値の検出結果が目標値になるようにクローズドループ制御して張力を一定に維持している。この制御の際には、検出されたアナログの電流値をディジタル値にA/D変換している。
【0005】
【発明が解決しようとする課題】
前記従来の電動リールでは、張力を一定に維持するために、胴径部と最大糸巻径とで流れた電流値をもとにその間の糸巻径の電流値をそれぞれ算出して各段階を電流値を求め、求められた電流値を目標値として電流値の検出結果が目標値になるようにクローズドループ制御している。しかし、クローズドループ制御により検出された電流値を目標電流値に近づくように制御すると、A/D変換後のディジタル値がふらつくため、ワウリング音が発生するととともにワウリング音によって消費電力が増加するおそれがある。
【0006】
本発明の課題は、張力が一定となるように制御される電動リールにおいて、ワウリング音を抑えて消費電力の増加を抑えることにある。
【0007】
【課題を解決するための手段】
発明1に係る電動リールは、釣り竿に装着されるリールであって、リール本体と、電動モータと、モータ駆動部と、デューティ比設定手段と、張力選択操作手段と、糸巻径検出手段と、デューティ比補正手段と、モータ制御手段とを備えている。リール本体は、釣り竿に装着されるものである。スプールは糸巻用のものであり、リール本体に回転自在に装着されている。電動モータは、スプールを糸巻き上げ方向に回転駆動するものである。モータ駆動部は、電動モータをデューティ比が変化するパルス幅変調信号で駆動するものである。デューティ比設定手段は、スプールに巻き付けられる釣り糸に作用する複数段階の張力に応じた複数段階のデューティ比を設定可能なものである。張力選択操作手段は、張力を複数段階のいずれかから選択操作するための手段である。糸巻径検出手段は、スプールに巻き付けられる釣り糸の糸巻径を検出する手段である。デューティ比補正手段は、選択された張力に応じたデューティ比を糸巻径検出手段で検出された糸巻径に応じて補正する手段である。モータ制御手段は、デューティ比補正手段で補正されたデューティ比でモータ駆動部を制御する手段である。
【0008】
この電動リールでは、張力選択操作手段により複数段階のいずれかの張力が選択されると、選択された段階の張力デューティ比が設定され、そのデューティ比でモータ駆動部が制御される。糸巻径が変化すると、検出された糸巻径に応じてデューティ比が補正され、補正されたデューティ比でモータ駆動部が制御される。ここでは、モータ駆動部を制御する際に電流値を検出して目標となる電流値に制御するのではなく、デューティ比を設定してそのデューティ比で制御するオープンループ制御を行っているので、制御中にデューティ比が上下に変動せずに糸巻径に応じてデューティ比が徐々に増えるだけになる。このため、張力一定制御時のスプールの回転速度の上下の変動を抑えることができ、ワウリング音を抑えて消費電力の増加を抑えることができる。しかも、現在の張力をたとえばトルク等で検出する必要がないので制御系の構成も簡素になる。
【0009】
発明2に係る電動リールは、発明1に記載のリールにおいて、デューティ比設定手段は、複数段階の張力毎に複数の糸巻径に応じたデューティ比を格納するデューティ比記憶手段を有し、デューティ比補正手段は、張力選択手段により選択された張力と糸巻径検出手段で検出された糸巻径とに応じてデューティ比記憶手段に記憶されたデューティ比を読み出す。この場合には、記憶手段に予め記憶されたデータを読み出すだけでデューティ比を補正できるので、制御が簡単になる。
【0010】
発明3に係る電動リールは、発明2に記載のリールにおいて、デューティ比記憶手段には、スプールに複数段階の張力をそれぞれ作用させたときに停止する寸前のスプール胴径と最大糸巻径とでのデューティ比を測定して得られた複数の糸巻径に応じたデューティ比が格納されている。この場合には、実際に測定したスプール胴径と最大糸巻径とでのデューティ比を用いて各糸巻径のデータを得ているので、張力を精度良く一定に制御できる。
【0011】
発明4に係る電動リールは、発明1から3のいずれかに記載のリールにおいて、糸巻径検出手段は、スプールの回転位置データを検出する回転位置データ検出手段と、検出された回転位置データに基づき前記スプールから繰り出される又はスプールに巻き付けられる釣り糸を長さを算出する糸長算出手段と、算出された糸長と、スプールに巻家釣られる釣り糸の全長と、スプールの胴径とにより釣り糸が巻き付けられた前記スプールの糸巻径を算出する糸巻径算出手段とを有する、請求項1から3のいずれかに記載の電動リール。この場合には、スプール回転位置データに基づいて算出される釣り糸の長さ、つまり仕掛けの水深表示のためのデータを用いて簡単に糸巻径を算出でき、糸巻径の検出が容易になる。
【0012】
【発明の実施の形態】
本発明の一実施形態による電動リールは、図1に示すように、釣り竿Rに装着されるリール本体1と、リール本体1の側方に配置されたスプール回転用のハンドル2と、ハンドル2のリール本体1側に配置されたドラグ調整用のスタードラグ3とを主に備えている。
【0013】
リール本体1は、左右1対の側板7a、7bとそれらを連結する複数の連結部材8とからなるフレーム7と、フレーム7の左右を覆う左右の側カバー9a、9bとを有している。ハンドル2側(図1の右側)の側カバー9bには、ハンドル2の回転軸が回転自在に支持されている。後部の連結部材8には、外部電源接続用の電源コードを接続するためのコネクタコード19が設けられている。
【0014】
リール本体1の内部には、ハンドル2に連結されたスプール10が回転自在に支持されている。スプール10の内部には、スプール10を糸巻き上げ方向に回転駆動する直流駆動のモータ12が配置されている。また、リール本体1のハンドル2側側面には、ハンドル2及びモータ12とスプール10との駆動伝達をオンオフするクラッチの操作レバー11が配置されている。このクラッチをオンすると、仕掛けの自重による糸繰り出し中に、糸繰り出し動作を停止できる。
【0015】
リール本体1の上部にはカウンタケース4が固定されている。カウンタケース4は、リール本体1の上部に配置され、上面に表示窓20が形成されている。カウンタケース4の上部には、仕掛けの水深や棚位置を水面からと底からとの2つの基準で表示するための液晶ディスプレイからなる表示部5が臨んでおり、表示部5の周囲には操作キー部6が設けられている。
【0016】
表示部5は、図2に示すように、中央に配置された4桁の7セグメント表示の水深表示領域5aと、その下方に配置された3桁の底棚水深表示領域5bと、水深表示領域5aの図2右側に配置された速度段数表示領域5cと、水深表示領域5aの図2右下部に配置された張力段数表示領域5dとを有している。速度段数表示領域5cは、操作キー部6により操作された現在の速度を5段階のセグメント図形で表示する。張力段数表示領域5dは、操作キー部6により操作された現在の張力を1−5の5段階の数字で表示する。また、水深表示領域5aの上方には表示モードを示す「底から」の文字が表示される。また、速度モードと張力モードの制御モードを示す「速度・張力」の文字のいずれかが表示される。さらに「学習」、「指定」、「下巻」、「糸送止」、「0セット」の5つの文字を表示可能である。「底から」の文字は、水深表示モードが底からモードの時に表示される。底からモードとは、仕掛けの水深を底基準で表示するモードである。なお、通常は、仕掛けの水深は水面基準(上からモード)で表示される。また、「学習」〜「下巻」までの文字は、糸巻モードの種類を示しており、いずれかが択一的に選択されると選択された糸巻モードの文字が表示される。
【0017】
操作キー部6は、表示部5の図1右側に上下に並べて配置された変更スイッチSK及びモータスイッチPWと、左側に上下に並べて配置されたモータモードスイッチVT、糸巻モードを切り換えるための糸巻モードスイッチMD及び底や棚を設定するためのメモスイッチTBとを有している。
モータスイッチPWは、モータ12をオンオフするためのスイッチであり、モータスイッチPWがオン操作されたときモータ12を回転させる連続巻き上げ可能なスイッチとなっている。
【0018】
変更スイッチSKは、駆動されたモータ12の速度又はトルクを増減するためのスイッチであり、上下の2つのスイッチを有している。この変更スイッチSKの上スイッチSK1を押すと速度又は張力が増加し下スイッチSK2を押すと減少する。
モータモードスイッチVTは、モータ12を制御するモードを張力制御する張力モードと速度制御する速度モードとに切り換えるためのスイッチであり、スイッチを押す毎に制御モードが切り換わる。なお、初期設定では制御モードが速度モードに設定されている。
【0019】
糸巻モードキーMDは、3種の糸巻モードを設定するためのスイッチであり、たとえばこれを1回押すと学習モードに設定され、2回連続して押すと指定モード、3回連続して押すと下巻モードにそれぞれ糸巻モードが設定される。ここで、学習モードは、糸径や長さが未知の釣り糸をスプール10に巻き付ける際に使用される糸巻モードであり、糸巻き付け最終部分でのスプール回転数とスプール1回転当たりの糸長との関係を学習して釣り糸全長にわたるスプール回転数と1回転当たりの糸長とを求めるために使用されるモードである。指定モードは、記憶部46内に用意された号数及び長さの釣り糸をスプールに巻き付けるときに使用されるモードである。下巻モードは、あらかじめ指定された糸巻径まで下糸を巻いた後に未知の釣り糸を巻き付ける際に使用されるモードである。この下巻モードは、糸巻径が異なるだけで基本的には学習モードと同じ考えで学習を行う。
【0020】
メモスイッチTBは、仕掛けが底に到達したときに押されたり、棚位置に到達すると押されるスイッチであり、そのときの水深が底や棚として設定される。この底メモスイッチSMを所定時間以上押すと、釣り糸が切れたときになどに水深表示の0点を新たな位置にセットできる。
リール制御部30は、カウンタケース4内に配置されたCPU、RAM、ROM、I/Oインターフェイス等を含むマイクロコンピュータを含んでいる。リール制御部30は、制御プログラムに従って表示部5の表示制御やモータ駆動制御等の各種の制御動作を実行する。リール制御部30には、図3に示すように、操作キー部6の各種のスイッチと、スプールセンサ41と、スプールカウンタ42とが接続されている。また、リール制御部30には、ブザー44と、PWM駆動回路45と、表示部5と、記憶部46と、他の入出力部とが接続されている。
【0021】
スプールセンサ41は、前後に並べて配置された2つのリードスイッチから構成されており、いずれのリードスイッチが先に検出パルスを発したかによりスプール10の回転方向を検出できる。スプールカウンタ42は、スプールセンサ41のオンオフ回数を計数するカウンタであり、この計数値によりスプール回転数に関する回転位置データが得られる。スプールカウンタ42は、スプール10が正転(糸繰り出し方向の回転)すると計数値が減少し、逆転すると増加する。ブザー44は、警報音を鳴らすために使用される。PWM駆動回路45は、モータ12をPWM駆動するものであり、リール制御部30によりデューティ比が制御されてモータ12をトルク可変に駆動する。
【0022】
記憶部46はたとえばEEPROM等の不揮発メモリから構成されている。記憶部46には、図4に示すように、棚位置等の表示データを記憶する表示データ記憶エリア50と、実際の糸長とスプール回転数との関係を示す学習データを記憶する学習データ記憶エリア51と、速度の段数SCに応じたスプール10の巻き上げ速度(rpm)の上限値を記憶する速度データ記憶エリア52と、5段階の張力毎にたとえば10段階の糸巻径に応じたモータ12のデューティ比を記憶する張力データ記憶エリア53と、種々のデータを記憶するデータ記憶エリア54とが設けられている。
【0023】
速度データ記憶エリア52には、たとえば、段数SCが1速の場合に上限の速度データSS=257rpm,2速の場合にSS=369rpm,3速の場合にSS=503rpm,4速の場合にSS=665rpm,5速の場合にSS=1000rpmがそれぞれ記憶されている。また、張力データ記憶エリア53には、スプール胴径と最大糸巻径との間で張力段数ごとに複数段階の糸巻径に対応したデューティ比のデータが格納されており、たとえば張力段数TCが1段の場合にデューティ比(%)TS=17〜25,2段の場合にTS=27〜40,3段の場合にTS=40〜60,4段の場合にTS=53〜80,5段の場合にTS=67〜100の範囲でそれぞれスプール胴径から最大糸巻径の間で10段階の値が記憶されている。
【0024】
これらのデューティ比の値は、スプール10に、たとえば5段階の張力をそれぞれ作用させたときに停止する寸前のスプール胴径と最大糸巻径とでのデューティ比を測定し、得られた測定結果に基づき決定されている。具体的には、同じ段階の張力を作用させたときのスプール胴径と最大糸巻径とでの2つのデューティ比のデータにより、デューティ比と糸巻径との関係を一次直線に近似し、近似して得られた一次直線からその中間の複数の糸巻径でのデューティ比を算出し、得られた各段階の糸巻径に応じたデューティ比が格納されている。
【0025】
データ記憶エリア54には、設定された速度段数SC又は張力段数TC等の各種の一時的なデータが格納されている。
次に本実施形態における糸長算出方法の概略を説明する。
本発明では、スプール1回転当たりの糸長Yとスプール回転数Xとの関係を一次直線に近似させることができることを利用して糸長Lを算出している。
【0026】
太さと全長が不明な釣り糸を糸巻径Bmmからスプール10に層状に巻き付けていき、c回転で全ての釣り糸を巻き終わったとする。次に、その状態からSmm釣り糸を繰り出したとき、スプール10がd回転したとする。
いま、スプール回転数Xとスプール1回転当たりの糸長Yとの関係を、横軸にスプール回転数Xを、縦軸にスプール1回転当たりの糸長をとると、一次直線で定義できるので、傾きをAとすると、下記式で表せる。
【0027】
Y=AX+Bπ (1)
したがって、スプール回転数Xとスプール1回転当たりの糸長Yとの関係を示すグラフは、図5に示すようになる。
いま、スプール10がc回転したときのスプール1回転当たりの糸長をY(c),c回転の巻き取り後、所定長さS繰り出してd回転したときのスプール1回転当たりの糸長をY(c−d)とすると、これらは以下のように表せる。
【0028】
Y(c)=A・c+Bπ (2)
Y(c−d)=A・(c−d)+Bπ (3)
図5に示すグラフでは、ハッチングで示す台形の面積が巻き付け終了後の糸繰り出し長さSに相当しているので、糸繰り出し長さSは以下のように表せる。
S=d・{Y(c)+Y(c−d)}/2 (4)
(4)式に(2),(3)式を代入すると、
S=d・{A・c+Bπ+A・(c−d)+Bπ}/2
=d・{A・(2c−d)+2Bπ}/2 (5)
(5)式を傾きAについて解くと以下のようになる。
【0029】
A=2(S−Bπd)/d(2c−d) (6)
したがって、4つのデータS,B,c,dを(6)式に代入することにより一次直線の傾きAを求めることができることがわかる。
たとえば、スプール10が巻き初めから2000回転で巻終わり、そこから10m繰り出したときにスプールが60回転した場合、スプール10の胴径(糸巻径)が30mmであったとすると、一次直線の傾きAは下記のようになる。
【0030】
A=2(10000−94.2*60)/60(2*2000−60)
=0.0368
そして、傾きA,切片Bπの近似の一次直線が決定できれば、一次直線をスプール1回転毎に積分処理(面積算出処理)することで巻き初めから巻終わりまでのたとえばスプール1回転毎の糸長L1〜LNを求める。そして、巻終わり時のスプール回転数cのときの水深LXを「0」にセットしてそれから巻き初めまでの水深LX(=LN)とスプール回転数Xとの関係を算出して記憶部46の学習データ記憶エリア51にたとえばマップ形式(LX=MAP(X))で記憶する。
【0031】
実釣り時にスプール10が回転すると、そのときにスプールセンサ41が検出したスプール回転数Xに基づき、記憶部46のマップから糸長LXを読み出し、読み出した糸長LXに基づいて仕掛けの水深(釣り糸先端の水深)を表示部5に表示する。
次に、リール制御部30によって行われる具体的な制御処理を、図6以降の制御フローチャートに従って説明する。
【0032】
電動リールが電源コードを介して外部電源に接続されると、図6のステップS1において初期設定を行う。この初期設定ではスプールカウンタ42の計数値をリセットしたり、各種の変数やフラグをリセットしたり、モータ制御モードを速度モードにし、表示モードを上からモードにする。
次にステップS2では表示処理を行う。表示処理では、水深表示等の各種の表示処理を行う。ここで、速度モードのときには、速度段数表示領域5cに変更スイッチSKにより操作された速度段数が、張力モードのときには張力段数表示領域5dに張力段数が表示される。また、速度モードと張力モードとのいずれかの制御モードが表示される。
【0033】
ステップS3では、操作キー部6のいずれかのスイッチが押されたか否かを判断する。またステップS4ではスプール10が回転しているか否かを判断する。この判断は、スプールセンサ41の出力により判断する。ステップS5ではその他の指令や入力がなされたか否かを判断する。
スイッチが押された場合にはステップS3からステップS6に移行してキー入力処理を実行する。またスプール10の回転が検出された場合にはステップS4からステップS7に移行する。ステップS7では各動作モード処理を実行する。その他の指令あるいは入力がなされた場合にはステップS5からステップS8に移行してその他の処理を実行する。
【0034】
ステップS6のキー入力処理では図7のステップS11でモータ制御モードスイッチVTが押されたか否かを判断する。ステップS12では、糸巻モードスイッチMDが押されたか否かを判断する。ステップS13では、モータスイッチPWが押された否かを判断する。ステップS14では、変更スイッチSKの上スイッチSK1が押されたか否かを判断する。ステップS15では、変更スイッチSKの下スイッチSK2が押されたか否かを判断する。ステップS16では、その他のスイッチが操作されたか否かを判断する。その他のスイッチの操作にはメモスイッチTB等の操作を含んでいる。
【0035】
モータモードスイッチVTが押されるとステップS11からステップS17に移行する。ステップS17では、モータ制御モードが速度モードか否かを判断する。速度モード中にモータモードスイッチVTが押されるということは釣り人が張力モードにしようとするためであるので、ステップS19に移行して制御モードを張力モードにセットする。これにより、変更スイッチSKの操作に応じてトルク制御が行われる。速度モードではなく張力モードの時にはステップS17からステップS18に移行し、モータ制御モードを速度モードにセットする。
【0036】
糸巻モードスイッチMDが押されるとステップS12からステップS20に移行する。ステップS20では、学習モードが設定されたか否かを判断する。糸巻モードスイッチMDの1回の操作により学習モードが設定されるとステップS20からステップS21に移行し後述する学習モード処理を実行する。糸巻モードスイッチMDの複数回の操作により指定モードや下巻モード等の他の糸巻モードが設定された場合には、ステップS20からステップS22に移行し設定された他の糸巻モードを実行する。
【0037】
モータスイッチPWが押されると、ステップS13からステップS23に移行する。ステップS23では、モータ12がすでにオンしている(回転している)か否かを判断する。モータ回転中にモータスイッチPWが押されるということは釣り人がモータ12を停止しようとするためであるので、ステップS25に移行してモータ12をオフする。モータ停止中の場合にはステップS23からステップS24に移行してモータ12をオンする。
【0038】
変更スイッチSKの上スイッチSK1が押されると、ステップS14からステップS26に移行する。ステップS26では、制御モードが速度モードか否かを判断する。速度モードのときには、ステップS28に移行し、後述する速度増加処理を行う。張力モードのときには、ステップS26からステップS27に移行し、後述する張力増加処理を行う。ここでは、上スイッチSK1が押されていると速度増加又は張力増加処理を行うので、結果として上スイッチSK1を押している時間だけこれらの増加処理が行われる。
【0039】
変更スイッチSKの下スイッチSK2が押されると、ステップS15からステップS29に移行する。ステップS29では、制御モードが速度モードか否かを判断する。速度モードのときには、ステップS31に移行し、後述する速度減少処理を行う。張力モードのときには、ステップS29からステップS30に移行し、後述する張力減少処理を行う。ここでも、下スイッチSK1が押されていると速度減少又は張力減少処理を行うので、結果として下スイッチSK1を押している時間だけこれらの減少処理が行われる。
【0040】
他のスイッチ入力がなされると、ステップS16からステップS32に移行し、たとえば、現在の水深の底棚値にセットするなどの操作されたスイッチ入力に応じた他のキー入力処理を行う。
ステップS21の学習処理では、図8のステップS40で糸巻き取りが開始したか否かを判断する。この判断は、スプールセンサ41によりスプール10が回転を開始したことを検出したことにより判断する。ステップS41では、糸巻き取りが終了したか否かを判断する。この判断は、所定のキー操作(たとえばメモキーTBの所定時間以上の操作)がなされたか否かにより判断する。糸巻き取りが終了した後、たとえば10m釣り糸を繰り出してスプール回転数とスプール1回転当たりの糸長との関係を学習するのであるが、ステップS42では、その10mの繰り出しが終了したか否かを判断する。この判断も所定のキー操作がなされたか否かにより判断する。なお、釣り糸にたとえば10m毎に異なる色づけがなされている場合には、上記繰り出し操作が行えるが、釣り糸によっては色づけがなされていない場合がある。このような場合には、10mの釣り糸を先端に結んでさらに10m釣り糸を巻き取ってもよい。繰り出しが終了していない場合には、ステップS40に戻る。
【0041】
糸巻き取りが開始されるとステップS40からステップS43に移行する。ステップS43では、スプール回転数Xをスプールカウンタ42の値に応じて増加させる。たとえば、スプールセンサ41がスプール1回転当たり10パルス出力し、スプールカウンタ42がスプール1回転当たり10ずつ増加するときには、スプールカウンタ42が10増加するとスプール回転数Xを1増加する。
【0042】
糸巻き取りが終了してスプール10の回転が停止するとステップS41からステップS44に移行する。ステップS44では、巻き取り完了したときのスプール回転数Xを総回転数cにセットする。ステップS45では、釣り糸の繰り出しに応じてスプール回転数Xを減じていく。この減算もステップS43と同様にたとえばスプールカウンタ42が10ずつ減じていくとスプール回転数Xを1減少させる。
【0043】
糸繰り出しが終了するとステップS42からステップS46に移行する。ステップS46では、スプール総回転数cから繰り出しにより減少したスプール回転数Xを減算し、減算値を繰り出し回転数dにセットする。この繰り出し回転数dが10m釣り糸を繰り出したときのスプール10の回転数である。ステップS47では、記憶部46から糸巻径Bπ及び繰り出し長さSを読み出す。この2つのデータは、あらかじめ記憶部46に書き込まれている。
【0044】
ステップS48では、得られた4つのデータc,d,Bπ,Sにより上記(6)式により近似一次直線の傾きAを求め、近似一次直線を算出する。これにより、糸径及び長さが未知の釣り糸の全長にわたる、スプール1回転長さYとスプール回転数Xとの関係が決定される。このスプール1回転長さYを用いて糸巻径SD(Y/π)を求め、張力モードのときの記憶部46の張力データ記憶エリア53から、設定された段階の張力の糸巻径に応じたデューティ比の読み出しを行い張力が一定になるようにしている。
【0045】
ステップS49では、得られた一次直線を積分処理して巻き初めから巻終わりまでのスプール回転数Xと糸長LNとの関係を算出する。そして、巻終わりを水深0にセットして糸長LNを水深LXに変換する。これによりスプール回転数Xと水深LXとの関係が決定される。
ステップS50では、得られたスプール回転数Xと水深LXの関係をマップ形式で記憶部46に記憶してメインルーチンに戻る。これにより、前述した学習処理が実行され、釣り糸全体にわたる学習を行うことなく最終部分のみの学習で糸巻径により変化するスプール回転数と糸長との関係を補正できる。これらの処理が終了するとキー入力ルーチンに戻る。
【0046】
ステップS28の速度増加処理では、図9のステップS51で、前にセットされた速度段数SCをデータ記憶エリア54から読み出す。ここで、データ記憶エリア54には、速度段数SCが増加又は減少するごとにその値が記憶される。また、電源が投入されたとき及びモータスイッチPWが押されてモータ12が停止したときに、速度段数SCが「0」にセットされ、データ記憶エリア54に記憶される。
【0047】
ステップS52では、読み出した速度段数SCを1段アップする。このときの増加した速度段数SCは、表示処理において速度段数表示領域5cに表示されるとともに、データ記憶エリア54に記憶される。なお、モータスイッチPWが押された直後は、速度段数SCが1段アップして「1」にセットされる。また、速度段数SCが「5」にセットされるとそれ以上増加することはない。
【0048】
ステップS53では、速度データ記憶エリア52から増加した速度段数SCに応じた速度データSSを読み出しセットする。ステップS54では、スプールセンサ41の出力からスプール10の速度データSPを読み込む。
ステップS55では、読み込んだ速度データSPが、セットされた速度段数SCに応じた速度データSS以上になったか否かを判断する。速度データSPが速度データSS未満のときには、ステップS55からステップS56に移行する。ステップS56では、現在のデューティ比Dをデータ記憶エリア54から読み出す。データ記憶エリア54には、デューティ比Dがセットされる都度、セットされたデューティ比Dが記憶される。
【0049】
ステップS57では、データ記憶エリア54から読み出した現在のデューティ比Dが最大デューティ比DU以上になったか否かを判断する。この最大デューティ比DUは、通常「100」であるが、速度段数SCやモータ12の負荷等に応じて最大デューティ比DUの設定を変更してもよい。デューティ比Dが最大デューティ比DU未満のときには、ステップS57からステップS58に移行し、デューティ比Dを所定の増分DI増加してセットする。この新たにセットされたデューティ比Dはデータ記憶エリア54に記憶される。なお、この増分DIは、たとえば「5」である。ステップS57で、デューティ比Dが最大デューティ比DU以上と判断するとステップS59に移行する。ステップS59では、デューティ比Dを最大デューティ比DUにセットする。
【0050】
一方、ステップS55で、速度データSPが速度データSS以上と判断したときには、何も処理せずキー入力処理に戻る。また、ステップS58又はS59の処理が終わるとキー入力処理に戻る。
この速度増加処理では、上スイッチSK1を押している時間だけ速度段数SCをアップし、アップした速度段数SCに応じた巻き上げ速度までスプール10の速度を増加させる。また、上スイッチSK1を押すのをやめると、再度、上スイッチSK1又は下スイッチSK2が押されるまで速度増加処理や速度減少処理は行われないので、速度増加結果の速度段数SCが維持され、その巻き上げ速度が維持される。
【0051】
ステップS27の張力増加処理では、速度モードのように速度を検出してその速度になるようにデューティ比を変更するクローズドループ制御を行うのではなく、設定された張力段階TC毎にさらに糸巻径SD毎にデューティ比TSを設定し、そのデューティ比TSによりオープンループ制御を行う。張力増加処理では、図10のステップS61で、前にセットされた張力段数TCをデータ記憶エリア54から読み出す。ここで、データ記憶エリア54には、張力段数TCが増加又は減少するごとにその値が記憶される。また、電源が投入されたとき及びモータスイッチPWが押されてモータ12が停止したときに、張力段数TCが「0」にセットされ、データ記憶エリア54に記憶される。
【0052】
ステップS62では、読み出した張力段数TCを1段アップする。このときの増加した張力段数TCは、表示処理において張力段数表示領域5dに表示されるとともに、データ記憶エリア54に記憶される。なお、モータスイッチPWが押された直後は、張力段数TCが1段アップして「1」にセットされる。また、張力段数TCが「5」にセットされるとそれ以上増加することはない。
【0053】
ステップS63では、糸巻径SDの算出処理を行う。糸巻径算出処理では、図11のステップS71でスプール回転数Xを読み込む。ステップS72では、スプール回転数Xをともに、学習処理により得られたスプール1回転長さYとスプール回転数Xとの関係を示す一次式からスプール1回転長さYを算出する。ステップS73では、得られたスプール1回転長さYをπで除算して糸巻径SDを算出する。
【0054】
ステップS64では、算出した糸巻径SDと増加した張力段数TCとに応じたデューティ比TSを張力データ記憶エリア53から読み出し、PWM駆動回路45にセットする。これにより、設定されるデューティ比TSが糸巻径SDにより補正されたものになり、釣り糸に作用する張力が常に設定された張力に近くなる。
【0055】
この張力増加処理では、上スイッチSK1を押している時間だけ張力段数TCをアップし、アップした張力段数TCに応じた張力になるように糸巻径に応じたデューティ比TSが読み出されセットされる。また、上スイッチSK1を押すのをやめると、再度、上スイッチSK1又は下スイッチSK2が押されるまで張力増加処理や張力減少処理は行われないので、張力増加結果の張力段数TCが維持され、その張力が維持される。この結果、負荷が大きくなると速度は遅くなり、負荷が小さくなると速度は速くなる。このため、負荷が小さい仕掛けの回収時などに仕掛けを高速で回収でき、手返しが速くなる。しかも糸巻径に応じてデューティ比TSが設定されているので、釣り糸に作用する張力が一定になる。このため、巻き上げ時にハリス切れや口切れを生じにくくなるとともにドラグの調整を行う必要がなくなる。
【0056】
ステップS31の速度減少処理では、図12のステップS81で、前にセットされた速度段数SCをデータ記憶エリア54から読み出す。ステップS82では、読み出した速度段数SCを1段ダウンする。このときの減少した速度段数SCは、表示処理において速度段数表示領域5cに表示されるとともに、データ記憶エリア54に記憶される。なお、速度段数SCが「1」にダウンされるとそれ以上減少することはない。ステップS83では、速度データ記憶エリア52から減少した速度段数SCに応じた速度データSSを読み出す。ステップS84では、スプールセンサ41の出力からスプール10の速度データSPを読み込む。
【0057】
ステップS85では、読み込んだ速度データSPが、セットされた速度段数SCに応じた速度データSS以下になったか否かを判断する。速度データSPが速度データSSを超えるときには、ステップS85からステップS86に移行する。ステップS86では、現在のデューティ比Dをデータ記憶エリア84から読み出す。
【0058】
ステップS87では、データ記憶エリア54から読み出した現在のデューティ比Dが最小デューティ比DL以上になったか否かを判断する。この最小デューティ比DLは、通常「40」である。デューティ比Dが最小デューティ比DLを超えるときには、ステップS57からステップS88に移行し、デューティ比Dを所定の減分DI減少させてセットする。このセットされたデューティ比Dはデータ記憶エリア54に記憶される。なお、この減分DIは、たとえば「5」である。ステップS88で、デューティ比Dが最小デューティ比DL以下と判断するとステップS89に移行する。ステップS89では、デューティ比Dを最小デューティ比DLにセットする。
【0059】
一方、ステップS85で、読み込んだ速度データSPがセットされた速度段数SCに応じた速度データSS以下になったかと判断すると何も処理せずキー入力処理に戻る。また、ステップS88又はS89の処理が終わるとキー入力処理に戻る。
この減速処理では、下スイッチSK2を押している時間速度段数SCをダウンし、ダウンした速度段数SCに応じた巻き上げ速度までスプール10の巻き上げ速度を減少させる。また、下スイッチSK2を押すのをやめると、再度、上スイッチSK1又は下スイッチSK2が押されるまで速度増加処理や速度減少処理は行われないので、速度減少結果の速度段数SCが維持され、その巻き上げ速度が維持される。
【0060】
ステップS30の張力減少処理では、図13のステップS91で、前にセットされた張力段数TCをデータ記憶エリア54から読み出す。ここで、データ記憶エリア54には、張力段数TCが増加又は減少するごとにその値が記憶される。また、電源が投入されたとき及びモータスイッチPWが押されてモータ12が停止したときに、張力段数TCが「0」にセットされ、データ記憶エリア54に記憶される。
【0061】
ステップS92では、読み出した張力段数TCを1段ダウンする。このときの減少した張力段数TCは、表示処理において張力段数表示領域5dに表示されるとともに、データ記憶エリア54に記憶される。なお、モータスイッチPWが押された直後は、張力段数TCが1段アップして「1」にセットされる。また、張力段数TCが「1」にセットされるとそれ以上減少することはない。
【0062】
ステップS93では、糸巻径SDの算出処理を行う。図11に示す糸巻径算出処理は、張力増加処理と同様であるで説明を省略する。ステップS94では、算出した糸巻径SDと減少した張力段数TCとに応じたデューティ比TSを張力データ記憶エリア53から読み出し、PWM駆動回路45にセットする。これにより、設定されるデューティ比TSが糸巻径SDにより補正されたものになり、釣り糸に作用する張力が常に設定された張力に近くなる。
【0063】
この張力減少処理でも、下スイッチSK2を押している時間だけ張力段数TCをダウンし、ダウンした張力段数TCに応じた張力になるように糸巻径に応じたデューティ比TSが読み出されセットされる。また、下スイッチSK2を押すのをやめると、再度、上スイッチSK1又は下スイッチSK2が押されるまで張力増加処理や張力減少処理は行われないので、張力減少結果の張力段数TCが維持され、その張力が維持される。この結果、負荷が大きくなると速度は遅くなり、負荷が小さくなると速度は速くなる。このため、負荷が小さい仕掛けの回収時などに仕掛けを高速で回収でき、手返しが速くなる。しかも糸巻径に応じてデューティ比TSが設定されているので、釣り糸に作用する張力が一定になる。このため、巻き上げ時にハリス切れや口切れを生じにくくなるとともにドラグの調整を行う必要がなくなる。
【0064】
ステップS7の各動作モード処理では、図14のステップS101でスプール10の回転方向が糸繰り出し方向か否かを判断する。この判断は、スプールセンサ41のいずれのリードスイッチが先にパルスを発したか否かにより判断する。スプール10の回転方向が糸繰り出し方向と判断するとステップS101からステップS102に移行する。ステップS102では、スプール回転数が減少する毎にスプール回転数から記憶部46に記憶されたデータを読み出し水深を算出する。この水深がステップS2の表示処理で表示される。ステップS103では、得られた水深が底位置に一致したか、つまり、仕掛けけが底に到達したか否かを判断する。底位置は、仕掛けけが底に到達したときにメモスイッチTBを押すことで記憶部46にセットされる。ステップS104では、他のモードか否かを判断する。他のモードではない場合には、各動作モード処理を終わりメインルーチンに戻る。
【0065】
水深が底位置に一致するとステップS103からステップS105に移行し、仕掛けけが底に到達したことを報知するためにブザー44を鳴らす。他のモードの場合には、ステップS104からステップS106に移行し、指定された他のモードを実行する。
スプール10の回転が糸巻き取り方向と判断するとステップS101からステップS107に移行する。ステップS107では、スプール回転数から記憶部46に記憶されたデータを読み出し水深を算出する。この水深がステップS2の表示処理で表示される。ステップS108では、水深が船縁停止位置に一致したか否かを判断する。船縁停止位置まで巻き取っていない場合にはメインルーチンに戻る。船縁停止位置に到達するとステップS108からステップS109に移行する。ステップS109では、仕掛けが船縁にあることを報知するためにブザー44を鳴らす。ステップS110では、モータ12をオフする。これにより魚が釣れたときに取り込みやすい位置に魚が配置される。この船縁停止位置は、たとえば水深6m以内で所定時間以上スプール10が停止しているとセットされる。
【0066】
この電動リールでは、モータ制御モードスイッチVTにより張力モードが選択されると、張力段数毎に張力一定にモータ12が制御される。このため、巻き上げ時にハリス切れや口切れを生じにくくなる。しかも、オンぷんループ制御により張力を一定に制御しているので、制御中にデューティ比が上下に変動せずに糸巻径に応じてデューティ比が徐々に増えるだけになる。このため、張力一定制御時のスプールの回転速度の上下の変動を抑えることができ、ワウリング音を抑えて消費電力の増加を抑えることができる。しかも、現在の張力をたとえばトルク等で検出する必要がないので制御系の構成も簡素になる。
【0067】
〔他の実施形態〕
(a)前記実施形態では変更スイッチSKの上スイッチ又は下スイッチの操作時間で速度又はトルクの段数を増減するように構成したが、操作回数に応じて増するようにしてもよい。
(b)前記実施形態では押しボタン型の変更スイッチSKにより段数の増減操作を行ったが、リール本体1に揺動自在に装着された操作レバーにより段数の増減操作を行ってもよい。この場合、段数の増減操作のみをこの操作レバーの揺動角度に応じて行ってもよく、また、段数の増減操作とモータのオンオフ操作とをこの操作レバーで行ってもよい。
【0068】
(c)前記実施形態では、張力データ記憶エリア53に張力段階毎に糸巻径に応じたデューティ比が格納されていたが、張力段階毎の所定糸巻径(たとえばスプール胴径)でのデューティ比だけを記憶し、それを算出又は検出された糸巻径に応じて補正処理するようにしてもよい。
(d)前記実施形態では、糸長の学習結果のデータにより糸巻径を算出したが、糸長検出器等を電動リールに装着し、それによる学習結果に基づいて糸巻径を検出するようにしてもよい。また、光センサや超音波センサなどの検出子を用いた糸巻径検出器で糸巻径を直接検出するようにしてもよい。
【0069】
【発明の効果】
本発明によれば、モータ駆動部を制御する際に電流値を検出して目標となる電流値に制御するのではなく、デューティ比を設定してそのデューティ比で制御するオープンループ制御を行っているので、制御中にデューティ比が上下に変動せずに糸巻径に応じてデューティ比が徐々に増えるだけになる。このため、張力一定制御時のスプールの回転速度の上下の変動を抑えることができ、ワウリング音を抑えて消費電力の増加を抑えることができる。しかも、現在の張力をたとえばトルク等で検出する必要がないので制御系の構成も簡素になる。
【図面の簡単な説明】
【図1】本発明の一実施形態を採用した電動リールの平面図。
【図2】その電動リールの表示部周辺の平面図。
【図3】その電動リールの制御ブロック図。
【図4】記憶部の格納内容を示す図。
【図5】スプール回転数とスプール1回転当たりの糸長との関係を示すグラフ。
【図6】その電動リールのメインルーチンを示すフローチャート。
【図7】キー入力処理サブルーチンを示すフローチャート。
【図8】学習処理サブルーチンを示すフローチャート。
【図9】速度増加処理サブルーチンを示すフローチャート。
【図10】張力増加処理サブルーチンを示すフローチャート。
【図11】糸巻径算出処理サブルーチンを示すフローチャート。
【図12】速度減少処理サブルーチンを示すフローチャート。
【図13】張力減少処理サブルーチンを示すフローチャート。
【図14】各動作モード処理サブルーチンを示すフローチャート。
【符号の説明】
1 リール本体
10 スプール
12 モータ
30 リール制御部
41 スプールセンサ
45 PWM駆動回路
46 記憶部
52 速度データ記憶エリア
53 張力データ記憶エリア
PW モータスイッチ
SK 変更スイッチ
Claims (4)
- 釣り竿に装着される電動リールであって、
前記釣り竿に装着されるリール本体と、
前記リール本体に回転自在に装着された糸巻用のスプールと、
前記スプールを糸巻き上げ方向に回転駆動する電動モータと、
前記電動モータをデューティ比が変化するパルス幅変調信号で駆動するモータ駆動部と、
前記スプールに巻き付けられる釣り糸に作用する複数段階の張力に応じた複数段階の前記デューティ比を設定可能なデューティ比設定手段と、
前記張力を複数段階のいずれかから選択操作するための張力選択操作手段と、
前記スプールに巻き付けられる釣り糸の糸巻径を検出する糸巻径検出手段と、
前記選択された張力に応じたデューティ比を前記糸巻径検出手段で検出された糸巻径に応じて補正するデューティ比補正手段と、
前記デューティ比補正手段で補正されたデューティ比で前記モータ駆動部を制御するモータ制御手段と、
を備えた電動リール。 - 前記デューティ比設定手段は、前記複数段階の張力毎に複数の糸巻径に応じたデューティ比を格納するデューティ比記憶手段を有し、
前記デューティ比補正手段は、前記張力選択手段により選択された張力と前記糸巻径検出手段で検出された糸巻径とに応じて前記デューティ比記憶手段に記憶されたデューティ比を読み出す、請求項1に記載の電動リール。 - 前記デューティ比記憶手段には、前記スプールに前記複数段階の張力をそれぞれ作用させたときに停止する寸前のスプール胴径と最大糸巻径とでのデューティ比を測定して得られた前記複数の糸巻径に応じたデューティ比が格納されている、請求項2に記載の電動リール。
- 前記糸巻径検出手段は、
前記スプールの回転位置データを検出する回転位置データ検出手段と、
前記検出された回転位置データに基づき前記スプールから繰り出される又は前記スプールに巻き付けられる釣り糸を長さを算出する糸長算出手段と、
前記算出された糸長と、前記スプールに巻き付けられる釣り糸の全長と、前記スプールの胴径とにより釣り糸が巻き付けられた前記スプールの糸巻径を算出する糸巻径算出手段とを有する、請求項1から3のいずれかに記載の電動リール。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002177303A JP4141186B2 (ja) | 2002-06-18 | 2002-06-18 | 電動リール |
| TW092110039A TWI272907B (en) | 2002-06-18 | 2003-04-29 | Electric reel |
| CNB031370357A CN100482070C (zh) | 2002-06-18 | 2003-05-29 | 电动渔线轮 |
| KR1020030039409A KR100970863B1 (ko) | 2002-06-18 | 2003-06-18 | 전동 릴 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002177303A JP4141186B2 (ja) | 2002-06-18 | 2002-06-18 | 電動リール |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004016136A true JP2004016136A (ja) | 2004-01-22 |
| JP4141186B2 JP4141186B2 (ja) | 2008-08-27 |
Family
ID=29996490
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002177303A Expired - Fee Related JP4141186B2 (ja) | 2002-06-18 | 2002-06-18 | 電動リール |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP4141186B2 (ja) |
| KR (1) | KR100970863B1 (ja) |
| CN (1) | CN100482070C (ja) |
| TW (1) | TWI272907B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009178118A (ja) * | 2008-01-31 | 2009-08-13 | Shimano Inc | 電動リールのモータ制御装置 |
| JP2020150827A (ja) * | 2019-03-19 | 2020-09-24 | 株式会社シマノ | 魚釣用電動リール、そのモード遷移制御方法、及びモード遷移制御プログラム |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5525795B2 (ja) * | 2009-11-04 | 2014-06-18 | 株式会社シマノ | 釣り用リールの糸長表示装置 |
| JP5654270B2 (ja) * | 2010-06-25 | 2015-01-14 | 株式会社シマノ | 釣り用リール |
| KR101650205B1 (ko) * | 2010-07-07 | 2016-08-22 | 엘에스산전 주식회사 | 오픈루프 와인더 직경 연산 홀드 및 토크리미트 절체를 포함하는 오픈루프 와인딩 시스템 |
| JP5755083B2 (ja) * | 2011-08-31 | 2015-07-29 | 株式会社シマノ | 電動リールの制御装置 |
| JP5764014B2 (ja) * | 2011-08-31 | 2015-08-12 | 株式会社シマノ | 両軸受リールの張力表示装置 |
| JP6606327B2 (ja) * | 2014-12-05 | 2019-11-13 | 株式会社シマノ | 電動リール |
| JP7114538B2 (ja) * | 2019-09-17 | 2022-08-08 | 太平洋工業株式会社 | 電動リール及び電動リール制御装置 |
| CN110583593B (zh) * | 2019-09-23 | 2021-05-11 | 黄光佐 | 一种防止水滴轮炸线的设计及实现方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3515881B2 (ja) | 1997-07-29 | 2004-04-05 | ダイワ精工株式会社 | 魚釣用リール |
| JP3993709B2 (ja) * | 1998-11-04 | 2007-10-17 | 株式会社シマノ | 電動リール |
| JP3519962B2 (ja) | 1998-11-20 | 2004-04-19 | ダイワ精工株式会社 | 魚釣用電動リール |
| JP4427126B2 (ja) | 1999-04-20 | 2010-03-03 | 株式会社シマノ | 電動リール |
| JP3762615B2 (ja) * | 2000-05-31 | 2006-04-05 | ダイワ精工株式会社 | 魚釣用電動リール |
| JP2002125546A (ja) * | 2000-10-27 | 2002-05-08 | Shimano Inc | 電動リールのモータ制御装置 |
-
2002
- 2002-06-18 JP JP2002177303A patent/JP4141186B2/ja not_active Expired - Fee Related
-
2003
- 2003-04-29 TW TW092110039A patent/TWI272907B/zh not_active IP Right Cessation
- 2003-05-29 CN CNB031370357A patent/CN100482070C/zh not_active Expired - Fee Related
- 2003-06-18 KR KR1020030039409A patent/KR100970863B1/ko active IP Right Grant
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009178118A (ja) * | 2008-01-31 | 2009-08-13 | Shimano Inc | 電動リールのモータ制御装置 |
| JP2020150827A (ja) * | 2019-03-19 | 2020-09-24 | 株式会社シマノ | 魚釣用電動リール、そのモード遷移制御方法、及びモード遷移制御プログラム |
| JP7257202B2 (ja) | 2019-03-19 | 2023-04-13 | 株式会社シマノ | 魚釣用電動リール、そのモード遷移制御方法、及びモード遷移制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN100482070C (zh) | 2009-04-29 |
| CN1466874A (zh) | 2004-01-14 |
| JP4141186B2 (ja) | 2008-08-27 |
| KR20030097670A (ko) | 2003-12-31 |
| TW200403025A (en) | 2004-03-01 |
| TWI272907B (en) | 2007-02-11 |
| KR100970863B1 (ko) | 2010-07-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4054540B2 (ja) | 電動リール | |
| JP5525795B2 (ja) | 釣り用リールの糸長表示装置 | |
| KR101687524B1 (ko) | 전동 릴의 모터 제어 장치 | |
| JP2011097831A5 (ja) | ||
| JP2010239931A5 (ja) | ||
| JP4141186B2 (ja) | 電動リール | |
| JP4427126B2 (ja) | 電動リール | |
| JP4307656B2 (ja) | 電動リールのモータ制御装置 | |
| JP7227877B2 (ja) | モータ制御装置 | |
| JP2004236566A (ja) | 電動リールのモータ制御装置 | |
| TWI633838B (zh) | 電動捲線器的顯示裝置 | |
| JP2002051674A (ja) | 電動リールのモータ制御回路 | |
| JP3682949B2 (ja) | 釣り用リールの糸長計測装置 | |
| JP4039887B2 (ja) | 電動リール | |
| JP3797815B2 (ja) | 釣り用リールの糸長計測装置 | |
| JP4520650B2 (ja) | 電動リールのモータ制御装置 | |
| JP3534623B2 (ja) | 電動リールのモータ制御装置 | |
| JP3361453B2 (ja) | 釣り用リールの糸長計測装置 | |
| JP3361428B2 (ja) | 釣り用リールの水深表示装置 | |
| JP3470870B2 (ja) | 釣り用リールの糸長計測装置 | |
| JP4039743B2 (ja) | 釣り用リール | |
| JP2002065127A (ja) | 釣り用リールの糸長計測装置 | |
| JP3448439B2 (ja) | 電動リールの回転速度制御装置 | |
| JP2000300130A (ja) | 電動リールのモータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050610 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070626 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20071120 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080520 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080610 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110620 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4141186 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110620 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120620 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120620 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130620 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |