EP3419889B1 - Verfahren zum handhaben von decksgeschirr auf schiffen sowie eine winde für decksgeschirr von schiffen - Google Patents
Verfahren zum handhaben von decksgeschirr auf schiffen sowie eine winde für decksgeschirr von schiffen Download PDFInfo
- Publication number
- EP3419889B1 EP3419889B1 EP17705012.7A EP17705012A EP3419889B1 EP 3419889 B1 EP3419889 B1 EP 3419889B1 EP 17705012 A EP17705012 A EP 17705012A EP 3419889 B1 EP3419889 B1 EP 3419889B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- brake
- winch
- actuation
- drive
- mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B21/00—Tying-up; Shifting, towing, or pushing equipment; Anchoring
- B63B21/16—Tying-up; Shifting, towing, or pushing equipment; Anchoring using winches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/60—Rope, cable, or chain winding mechanisms; Capstans adapted for special purposes
- B66D1/72—Anchor-chain sprockets; Anchor capstans
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D5/00—Braking or detent devices characterised by application to lifting or hoisting gear, e.g. for controlling the lowering of loads
- B66D5/02—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes
- B66D5/06—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes with radial effect
- B66D5/10—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes with radial effect embodying bands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D5/00—Braking or detent devices characterised by application to lifting or hoisting gear, e.g. for controlling the lowering of loads
- B66D5/02—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes
- B66D5/24—Operating devices
- B66D5/26—Operating devices pneumatic or hydraulic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D5/00—Braking or detent devices characterised by application to lifting or hoisting gear, e.g. for controlling the lowering of loads
- B66D5/02—Crane, lift hoist, or winch brakes operating on drums, barrels, or ropes
- B66D5/24—Operating devices
- B66D5/30—Operating devices electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B21/00—Tying-up; Shifting, towing, or pushing equipment; Anchoring
- B63B21/18—Stoppers for anchor chains
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63B—SHIPS OR OTHER WATERBORNE VESSELS; EQUIPMENT FOR SHIPPING
- B63B2205/00—Tethers
Definitions
- the invention relates to a method for handling deck harness on ships according to the preamble of claim 1 and a winch for deck harness according to the preamble of claim 5.
- To the deck harness of ships include anchor and anchor chain, hawsers such as tow hawses, and mooring.
- anchors and their anchor chains and hawsers and mooring with winches are at least high or densely fetched and preferably also gefiert.
- anchor winches are used with a so-called sprocket for positive engagement in some chain links of the anchor chain.
- hawsers and mooring winches are used.
- the sprocket of the windlass is locked by a brake, usually one after a first type of actuation manually operated band brake, positive and non-positive.
- a brake usually one after a first type of actuation manually operated band brake, positive and non-positive.
- the winch drum is locked positively and non-positively by a hand-operated brake.
- the invention has for its object to form a method and a winch of the type mentioned in that at an overload of the drive when raising the anchor or sealing the mooring or hawser unintentional removal of the anchor chain, the hawser or mooring is reliably prevented ,
- a method for achieving this object comprises the measures of claim 1.
- this method when exceeding a certain load of the winch and / or the drive of the same, it is provided to pull the brake according to a second type of actuation.
- This second type of actuation ensures rapid and safe application of the brake in the event of overload, without the need to manually tighten the brake according to the first type of actuation.
- the brake can thus be tightened sufficiently firm according to the second type of actuation regardless of the first type of actuation, and in the shortest possible time.
- the unintentional removal of the anchor chain, the hawser or the mooring of the winch is safely avoided in good time.
- the second type of actuation virtually leads to an emergency stop of the drive and / or emergency braking of the winch or constitutes an emergency stop of the drive and / or an emergency braking of the winch.
- the second type of actuation can temporarily block the winch frictionally and / or non-positively.
- the load of the drive of the winch when catching up the anchor or when sealing a hawser or a mooring device is measured, preferably continuously or at certain time intervals successively.
- the load of the anchor chain, the hawser or mooring can be measured.
- the brake after the second actuation preferably automatically tightened or tightened so that it is not even to overload the drive and a possible possible impairment of the same can come, but above all the risk of unwanted withdrawal of the anchor chain, the hawser or the mooring of the winch is avoided with certainty.
- the drive, the anchor chain, the hawser and / or the mooring load with the brake applied preferably after the second actuation type attracted brake determined and falls below a predetermined load, the brake after the second actuation solved again and the drive of the winch started again.
- the brake is applied in an overload condition, it is canceled again after the second type of actuation, as it were, when the load drops again due to the preferably continuous or periodic load measurement becomes.
- the inventive method thus makes it possible to take the winch back into operation immediately when the load, for example, of the armature and its anchor chain has decreased again and thus the power of the drive of the winch is sufficient, the anchor with the anchor chain, the hawser or the Mooring again or further to catch or tighten.
- the brake in the second actuation the brake is operated by a motor or hydraulically.
- a motor or hydraulically is particularly suitable for load-dependent control or regulation of the winds.
- a winch for solving the above-mentioned problem has the features of claim 5.
- this winch it is provided to actuate the brake, in particular its actuating device, if necessary, according to a second type of actuation.
- the actuator of the brake with a pivotable about a fixed pivot axis double-armed lever.
- a first, shorter lever arm of the double-armed lever may be with one on the brake arranged coupling arm connected, preferably articulated.
- a linear drive is coupled in a preferred embodiment of the brake.
- the linear drive can be a pressure medium cylinder, preferably a hydraulic cylinder, but also a motor-driven spindle drive or a rack drive.
- the second type of actuation is hydraulically or motor feasible.
- the second type of actuation makes it possible to actuate the braking device in a different manner, in particular to perform a kind of "emergency braking".
- the second type of actuation of the first type of actuation which preferably takes place manually, superimposed and / or decoupled from the first type of actuation.
- additional types of actuation are created.
- both types of actuation are independently feasible.
- the types of operation are not linked.
- the second type of actuation can take place without first having to undo the first type of actuation or vice versa.
- the brake for carrying out the second type of actuation with a motor or hydraulic drive. If the first type of actuation is preferably carried out manually, the brake can be actuated automatically and optionally remotely controlled after the second actuation mode. As a result, the brake can be adjusted automatically according to the second type of actuation, in particular be further tightened according to the needs.
- the actuating device of the brake also has a preferably manually operated spindle with a spindle nut. These serve in particular for carrying out the first type of actuation. Furthermore, it can be provided to associate one end of a guide arm with the linear drive and to pivotally mount the opposite end of the guide arm on the pivot axis of the double-armed lever. That way provided a hand-operated spindle with a spindle nut commercial actuating device of the brake with the additional linear drive for the motor or hydraulic taking place second actuation.
- the linear drive and / or the guide arm are articulated on the spindle nut or on the spindle for the first mode.
- the brake can be manually actuated, for example, and adjusted independently of the spindle by the second motor on the spindle nut supporting the linear drive.
- the linear drive is not articulated together with the guide arm on the spindle nut, but the linear drive engages on the spindle nut supporting guide arm.
- a measuring device for determining the load of the drive of the winch and / or the tensile load in the anchor chain, the hawser, the mooring device or the like is provided.
- the measuring device can also be used to determine a possible slip of the brake.
- the brake according to the second mode according to the additional linear drive can be tightened, if necessary so far that the brake is frictionally and / or non-positively quasi blocked , This avoids unintentional pulling off of the anchor chain, the hawser or the mooring device from the winch.
- the measuring device can also serve to determine a decreasing load, which allows a further catching up of the anchor chain or tightening the mooring line or the hawser by the drive is set in motion again after releasing the brake. As a result, the quasi “emergency braking" of the winch is immediately reversed automatically in case of overload, as soon as the overload has been eliminated or decayed.
- a control which actuates the linear drive in dependence on at least one measured value recorded with the measuring device, in particular such that it controls the linear drive Brake force of the brake automatically changed in response to the response to the measured values determined by the controller.
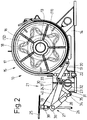
- the figures show a trained as windlass 10 winds. At least one such windlass is usually arranged on the deck of larger commercial ships, in particular seagoing ships such as container ships, general cargo carriers, tankers, ferries, cruise ships, tugs or the like.
- the windlass 10 is used for lowering and catching up an anchor with its anchor chain.
- the anchor and the anchor chain are not shown in the figures.
- the anchor chain is in the field of windlass 10 around a part, for example, one to two thirds, a sprocket 11 of the windlass 10 wrapped around.
- the chain link receptacles 12 are arranged in the circumference of the lateral surface of the sprocket 11 and thus serve for the positive coupling and entrainment of the anchor chain by the rotationally driven sprocket 11.
- the sprocket 11 is mounted to be driven in rotation about a bearing through its longitudinal central axis drive shaft 13 at opposite bearings on a bearing block 14 of the windlass 10.
- the bearing block 14 is fixedly mounted on the deck of the ship in question.
- the drive shaft 13 is coupled to an electric or hydraulic drive, not shown in the figures.
- the windlass 10 also has a braking device with a brake which is formed in the embodiment shown as a band brake 15.
- the fire brake 15 is arranged on one side next to the sprocket 11.
- a brake drum 16 with a cylindrical braking surface 17 next to the sprocket 11 rotatably mounted on the drive shaft 13 is attached.
- a large part of the cylindrical braking surface 17 of the brake drum 16 is looped around by an at least partially elastic brake band 18.
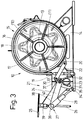
- By moving together opposite ends 19, 20 of the brake band 18, it is pressed against the braking surface 17 of the brake drum 16 and thereby the fire brake 15 is tightened ( Fig. 2 ).
- one end 19 of the brake band 18 is fixedly connected to the bearing block 14 of the windlass 10, while the opposite end 20 of the brake band 18 is movable.
- the braking device of the windlass 10 further has an actuating means which engages the movable end 20 of the brake band 18 and serves to release and on-demand tightening of the band brake 15.
- an actuating means which engages the movable end 20 of the brake band 18 and serves to release and on-demand tightening of the band brake 15.
- To tighten the band brake 15 pulls the actuating means at the movable end 20 of the brake band 18.
- the actuator leaves the movable end 20 of the brake band 18 in whole or in part.
- actuating means of the band brake namely an actuator 21, shown.
- This actuating device 21 has a coupling arm 22 hingedly connected to the movable end 20 of the brake band 18, for example two elongated flaps adjacent to each other with a small parallel distance, a double-armed lever 23 and a guide arm 24 likewise formed of two elongated flaps lying parallel next to one another at a small distance.
- the actuator 21 has a rotatable from a handwheel 25 at the upper end 39 elongated threaded spindle 26 with a mounted thereon spindle nut 27 for bringing about a first type of actuation and designed as a hydraulic cylinder 26 pressure medium cylinder for bringing about a second type of actuation.
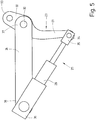
- the double-armed lever 23 is pivotable between a short lever arm 30 and a long lever arm 31 about a fixedly mounted on the bearing block 14 pivot axis 32.
- a free end 33 of the short lever arm 30 of the double-armed lever 23 is pivotally connected to the movable end 20 of the brake band 18 opposite end of the coupling arm 22.
- An opposite end 34 of the long lever arm 31 of the double-armed lever 23 is pivotally connected to a piston rod end 35 of the hydraulic cylinder 28.
- An opposite, cylinder-side end 36 of the hydraulic cylinder 28 is in the embodiment of Fig. 1 to 5 hinged or rotatably hinged to the spindle nut 27.
- the guide arm 24 is rotatably mounted with one end 37 on the fixed pivot axis 32 and the opposite end 38 rotatably or pivotally connected to the spindle nut 27.
- the connected to the handwheel 25 upper end 39 of the threaded spindle 26 is pivotable about a transverse axis, but otherwise fixed to a support arm 40 of the bearing block 14 of the windlass 10 is attached.
- the spindle nut 27 moves in one or the other direction along the longitudinal axis of the threaded spindle 26 depending on the direction of rotation of the handwheel 25, that is to say according to FIGS Fig. 2 and 3 up or down.
- the distance between the spindle nut 27 is kept constant from the guide arm 24 to the pivot axis 32 so that due to the pivotable at the upper end 39 about a transverse axis fixed mounting of the threaded spindle 26 on the bearing block 14, the longitudinal axis of the threaded spindle 26 supported against lateral pivoting.
- the unactuated hydraulic cylinder 28 acts as a coupling member between the spindle nut 27 and the end 34 of the long lever arm 31 of the double-armed lever 23, so that when moved away from the upper end 39 of the threaded spindle 26 spindle nut 27 from itself at the same supporting hydraulic cylinder 28 of the double-armed lever 23 is pivoted about the fixed pivot axis 32 counterclockwise, whereby the end 33 of the short arm 30 of the double-armed lever 23, the movable end 20 is pulled to the fixed end 19 of the brake band 18 and thereby tightening the band brake 15 by pressing and nestling of the brake band 18 is brought to the braking surface 17 of the brake drum 16 ( Fig. 3 ).
- Fig. 6 and 7 show an alternative embodiment of an actuator 41 for tightening and loosening the band brake 15 of the windlass 10.
- this actuator 41 of the actuator 21 which is why the same reference numerals are used for the same parts.
- the actuator 41 to the actuator 21 is that the cylinder-side end 36 of the hydraulic cylinder 28 is not hinged to the spindle nut 27, but on the guide arm 24, adjacent to the end 38 of the guide arm 24, whereby this hinged to the spindle nut 27 is.
- the guide arm 24 has in the vicinity of its hinged to the spindle nut 27 end 38 via a parallel to the pivot axis 32 extending axis of rotation 42.
- the cylinder-side end 36 of the hydraulic cylinder 28 is pivotally mounted. Since the axis of rotation 42 is off-center between the ends 37, 38 of the guide arm 24, the force is introduced from the hydraulic cylinder 28 in contrast to the embodiment of Fig.
- the windlass 10 has a measuring device not shown in the figures for measuring their load.
- the load can be measured by the power consumption of the electromotive or hydraulic drive of the sprocket 11.
- the measurement can also be done by determining the voltage in the drive shaft of the motor or the drive shaft 13 of the sprocket 11, for example via strain gauges.
- the measurement or load can also be done by determining the tension in the anchor chain.
- at least one chain link of the anchor chain a tension measuring device, for example on the basis of at least one strain gauge, be assigned.
- the tension or load values thus determined by the anchor chain are then preferably transmitted telemetrically to a controller of the windlass 10.
- the measurement of the load is preferably carried out continuously by successive measurements, in particular at regular intervals successive measurements.
- the measured load or the measured values can be input into a control for the hydraulic cylinder 28, which is then actuated load-dependent, in particular for tightening and / or releasing the band brake 15 on demand.
- Windlass 10 shown can have an additional winch, not shown, with a winch drum for mooring or other hawser, such as towing hoses.
- the winch is connected via a clutch and / or a gear with the drive of the sprocket 11 of the windlass 10.
- the transmission is preferably designed so that either the sprocket 11 is rotationally driven by the drive or the winch drum of the winch.
- the winch or winch drum is preferably assigned a separate braking device with its own actuating device. In this way, with the single drive of the windlass 10 either the chain 11 for fishing or fetching or catching up the anchor can be operated or the winch for sealing or fetching a mooring or a towline.
- the invention is also suitable for windlasses and / or winches, which instead of a band brake 15 have a different brake or braking device, such as a drum, disc or shoe brake.
- the band brake 15 is tightened more strongly via the handwheel 25, so that the armature is held over its anchor chain and the windlass 10. This is done by a force and friction between the brake band 18 and the brake drum 16 of the band brake 15 and a positive connection between some links of the anchor chain and the sprocket 11 of the windlass 10th
- this first actuation is done manually by means of the handwheel 25 rotatably driven threaded spindle 26 and the involvement of the actuator 21st
- the windlass 10 is driven by a hydraulic or electric motor drive not shown in the corresponding direction of rotation.
- a hydraulic or electric motor drive not shown in the corresponding direction of rotation.
- the drive of the windlass 10 is not able to catch up with the anchor at all, there is a risk that the high tension of the anchor chain will reverse the drive and cause it to pull away instead of lifting the anchor the anchor chain comes from the windlass 10. Then the drive of the windlass 10 stops no longer the anchor chain; the opposite occurs by the armature winch 10 is withdrawn from the windlass 10 under rotating entrainment of the sprocket 11 and the drive shaft 13 with the brake drum 16. This may result in the risk of loss of the anchor to the anchor chain. To counteract this, the method provides a second type of actuation of the windlass 10, in particular the actuator 21 of the band brake 15 of the windlass 10, before.
- the second type of actuation of the actuator 21 is effected by a drive, in the embodiment shown, the actuator 21 of the brake band 18 associated hydraulic cylinder 28. This can automatically tighten without manual intervention, the fire brake 15, to the extent that unintentional withdrawal of the anchor chain from the windlass 10 even under the most unfavorable conditions can no longer be done.
- the second type of actuation which takes place in the embodiment shown by the hydraulic cylinder 28 or a similar linear drive, so represents an emergency stop and / or emergency braking.
- the hydraulic cylinder 28 attracts by means of the actuator 21, the brake band 18 in that it by extending (see. Fig. 2 and 3 ) the double-armed lever 23 of the Actuator 21 is pivoted counterclockwise about the pivot axis 32, whereby the coupling arm 22 is pulled approximately in the direction of the handwheel 25 from the short lever arm 30 of the double-armed lever 23.
- the movable end 20 of the brake band 18 is moved closer to the fixed end 19 of the brake band 18 and thereby wrapped around the brake band 18 with greater tension around the braking surface 17 of the brake drum 16.
- the brake band 18 thereby adapts more firmly to the cylindrical braking surface 17 of the brake drum 16.
- the band brake 15 may optionally be so much tightened by the hydraulic cylinder 28 after the second type of actuation of the windlass 10, that the band brake 15 fixes the drive shaft 13 with the chain nut 11 held thereon so that it can not be rotated, by friction and friction / or adhesion between the correspondingly strongly tightened brake band 18 and the braking surface 17 of the brake drum 16.
- a slip between the braking surface 17 and the brake band 18 is no longer possible even under the most unfavorable conditions.
- the control or regulation of the second actuation inducing hydraulic cylinder 28 is load-dependent.
- at least one load sensor or force sensor are associated with the drive of the windlass 10, the chain sprocket 11 and / or its drive shaft 13. It measures continuously, either permanently or at regular intervals, the power or force applied or exerted by the drive when the anchor is being raised or tightened.
- the load which acts on the windlass 10 can also be measured differently, for example by strain gauges provided on the drive shaft 13 with the chain sprocket 11, the drive train of the drive shaft 13 and / or in or on the anchor chain.
- a plurality of redundant transducers at the same or at different points of the windlass 10 and / or the anchor chain.
- the controller can stop the drive of the windlass 10 before it is damaged or even turned back and at the same time or with some time offset before or Subsequently, according to the second mode of actuation by the hydraulic cylinder 28, the brake band 18 is tightened in the manner of an "emergency brake" that the load acting on the windlass 10 under any circumstances deducts the anchor chain from the windlass 10 by the sprocket 11 of the load of the armature and the anchor chain is rotated counter to the direction in which the drive the chain sprocket 11 for raising the Anchor turns with the anchor chain while the anchor chain from the windlass 10 is withdrawn.
- the load or force measuring device may also serve to continue to measure after the taking place according to the second type of actuation "emergency braking" of the windlass 10 against unintentional withdrawal of the anchor chain on the windlass 10 and / or anchor chain force or load in the case of abating or Decreasing the overload and falling below the limit value of the load of the drive of the windlass 10 from the hydraulic cylinder 28 after the second actuation the band brake 15 is released again and the drive is set in motion again to the armature with the anchor chain with decreasing load of the windlass 10 dichtzuholen.
- the inventive method runs with the alternatively formed actuator 41 according to the Fig. 6 and 7 just as described above.
- the invention is suitable not only for the windlass 10 described above, but also for winches for Dichtholen and controlled Fieren of hawsers, such as towing hawsers and / or mooring.
- the inventive method with winches is feasible.
- Such a winch may be associated with the windlass 10 shown, so that it is switchable from anchor operation to winch operation and thus either suitable for draining or Dichtholen an anchor with an anchor chain, but also suitable for sealing or Fieren of hawsers and mooring.
- the invention is also suitable for winches, which are not optionally used as windlass 10. Then, in principle, the sprocket 11 of the windlass 10 shown in the figures is replaced by a winch drum.
Description
- Die Erfindung betrifft ein Verfahren zum Handhaben von Decksgeschirr auf Schiffen gemäß dem Oberbegriff des Anspruchs 1 sowie eine Winde für Decksgeschirr gemäß dem Oberbegriff des Anspruchs 5.
- Zum Decksgeschirr von Schiffen zählen unter anderem Anker samt Ankerkette, Trossen wie beispielsweise Schlepptrossen, und Festmacher. Vor allem bei großen seegängigen Schiffen wie Frachtschiffen, Fähren und Kreuzfahrtschiffen, werden Anker und ihre Ankerketten sowie Trossen und Festmacher mit Winden zumindest hoch- bzw. dichtgeholt und vorzugsweise auch gefiert. Für Ankerketten werden Ankerwinden mit einer sogenannten Kettennuss zum formschlüssigen Eingriff in einige Kettenglieder der Ankerkette verwendet. Bei Trossen und Festmachern werden Winschen eingesetzt. Diese verfügen über eine Trommel mit einer nach innen gewölbten Mantelfläche, um die die Trossen oder Festmacher mehrfach herumgelegt werden zur Herbeiführung eines entsprechenden Reib- und Kraftschlusses zwischen der Winschtrommel und der Trosse bzw. Festmacher beim Dichtholen derselben.
- Nach dem Ankern wird die Kettennuss der Ankerwinde von einer Bremse, üblicherweise eine nach einer ersten Betätigungsart von Hand betätigte Bandbremse, form- und kraftschlüssig arretiert. Gleiches gilt für Winschen, wo nach dem Dichtholen der Trosse oder des Festmachers die Winschtrommel von einer handbetätigten Bremse form- und kraftschlüssig arretiert wird.
- Vor allem beim Aufholen des Ankers mit seiner Ankerkette durch einen motorischen Antrieb der Kettennuss der Ankerwinde kann es vorkommen, dass der Antrieb die notwendige Kraft nicht aufbringen kann, beispielsweise wenn der Anker im steinigen Untergrund hakt oder durch starken Wind und Seegang das Schiff große Kräfte auf die Ankerkette ausübt. Es besteht dann die Gefahr des unbeabsichtigten Abziehens der Ankerkette durch ein von der Ankerkette erfolgendes Zurückdrehen des Antriebs. Das kann so weit gehen, dass die schiffsseitige Verbindung des Endes der Ankerkette reißt und die Ankerkette mit dem Anker verloren geht. Gleiches kann beim Dichtholen von Festmachern und Trossen eintreten.
- Aus der
US 3 603 561 A ist ein Gewinde für ein Marineschiff bekannt, die über eine Bremse verfügt, die mechanisch oder auch hydraulisch betätigbar ist. Die Art der Betätigung der Bremse erfolgt in Abhängigkeit von der vorherrschenden Wetterbedingungen. - Der Erfindung liegt die Aufgabe zugrunde, ein Verfahren und eine Winde der eingangs genannten Art dahingehend auszubilden, dass bei einer Überlastung des Antriebs beim Hochholen des Ankers oder Dichtholen des Festmachers oder der Trosse ein ungewolltes Abziehen der Ankerkette, der Trosse oder des Festmachers zuverlässig verhindert wird.
- Ein Verfahren zur Lösung dieser Aufgabe weist die Maßnahmen des Anspruchs 1 auf. Gemäß diesem Verfahren ist es vorgesehen, beim Überschreiten einer bestimmten Belastung der Winde und/oder des Antriebs derselben die Bremse nach einer zweiten Betätigungsart zu ziehen. Diese zweite Betätigungsart gewährleistet im Überlastfalle ein rasches und sicheres Anziehen der Bremse, ohne dass dazu die Bremse gemäß der ersten Betätigungsart manuell angezogen werden muss. Die Bremse kann so gemäß der zweiten Betätigungsart unabhängig von der ersten Betätigungsart in ausreichendem Maße fester angezogen werden, und das in kürzester Zeit. So wird rechtzeitig ein unbeabsichtigtes Abziehen der Ankerkette, der Trosse oder des Festmachers von der Winde sicher vermieden. Die zweite Betätigungsart fährt quasi zu einem Notstop des Antriebs und/oder einer Notbremsung der Winde oder stellt einen Notstop des Antriebs und/ oder eine Notbremsung der Winde dar. Die zweite Betätigungsart kann die Winde temporär reib- und/oder kraftschlüssig blockieren.
- Bevorzugt wird die Last des Antriebs der Winde beim Aufholen des Ankers oder beim Dichtholen einer Trosse bzw. eines Festmachers gemessen, und zwar bevorzugt fortlaufend bzw. mit bestimmten Zeitabständen aufeinanderfolgend. Alternativ kann auch die Last der Ankerkette, der Trosse oder des Festmachers gemessen werden. Beim Überschreiten einer vorbestimmten Last wird dann die Bremse nach der zweiten Betätigungsart angezogen und bevorzugt der Antrieb gestoppt. Durch eine vorzugsweise kontinuierlich oder in aufeinanderfolgenden Zeitabständen erfolgende Messung der Last wird eine Überlastung des Antriebs oder gar aufgrund einer zu großen Last rückläufige Bewegung des Antriebs die Bremse nach der zweiten Betätigungsart vorzugsweise automatisch so fest angezogen bzw. nachgezogen, dass es gar nicht erst zur Überlastung des Antriebs und einer damit einhergehenden möglichen Beeinträchtigung desselben kommen kann, vor allem aber die Gefahr eines ungewollten Abziehens der Ankerkette, der Trosse oder des Festmachers von der Winde mit Sicherheit vermieden wird.
- Nach einer vorteilhaften Weiterbildung des Verfahrens werden die auf die Winde, den Antrieb, die Ankerkette, die Trosse und/oder den Festmacher einwirkende Last bei angezogener Bremse, vorzugsweise nach der zweiten Betätigungsart angezogener Bremse, ermittelt und beim Unterschreiten einer vorgegebenen Last die Bremse nach der zweiten Betätigungsart wieder gelöst sowie der Antrieb der Winde wieder gestartet. Das führt dazu, dass das bei Überlast erfolgende Anziehen der Bremse nach der zweiten Betätigungsart, also quasi die "Notbremsung", wieder aufgehoben wird, sobald ein ein erneutes Aktiveren des Antriebs zulassendes Absinken der Last aufgrund der vorzugsweise fortlaufend oder in regelmäßigen Zeitabständen erfolgenden Lastmessung festgestellt wird. Das erfindungsgemäße Verfahren ermöglicht es somit, die Winde sogleich wieder in Betrieb zu nehmen, wenn die Belastung beispielsweise des Ankers und seiner Ankerkette sich wieder verringert hat und dadurch die Leistung des Antriebs der Winde ausreicht, den Anker mit der Ankerkette, die Trosse bzw. den Festmacher wieder bzw. weiter einzuholen oder festzuziehen.
- Bei einer bevorzugten Ausgestaltung des Verfahrens ist es vorgesehen, dass bei der zweiten Betätigungsart die Bremse motorisch oder hydraulisch betrieben wird. Dadurch kann das Festziehen und auch Lösen der Bremse im Gegensatz zur ersten Betätigungsart gemäß der zweiten Betätigungsart automatisch erfolgen. Ein solcher motorischer bzw. hydraulischer Antrieb eignet sich besonders auch zur lastabhängigen Steuerung oder Regelung der Winde.
- Eine Winde zur Lösung der eingangs genannten Aufgabe weist die Merkmale des Anspruchs 5 auf. Bei dieser Winde ist es vorgesehen, die Bremse, insbesondere ihre Betätigungseinrichtung, bedarfsweise nach einer zweiten Betätigungsart zu betätigen. Dazu ist es vorgesehen, der Betätigungseinrichtung der Bremse einen um eine ortsfeste Schwenkachse verschwenkbaren doppelarmigen Hebel zuzuordnen. Ein erster, kürzerer Hebelarm des doppelarmigen Hebels ist gegebenenfalls mit einem an der Bremse angeordneten Koppelarm verbunden, und zwar vorzugsweise gelenkig. Am zweiten, insbesondere längeren Hebelarm des doppelarmigen Hebels ist bei einer bevorzugten Ausgestaltung der Bremse ein Linearantrieb angekoppelt. Beim Linearantrieb kann es sich um einen Druckmittelzylinder, vorzugsweise einen Hydraulikzylinder, aber auch um einen motorisch antreibbaren Spindeltrieb oder einen Zahnstangenantrieb handeln. Mit diesem Linearantrieb ist die zweite Betätigungsart hydraulisch bzw. motorisch durchführbar. Die zweite Betätigungsart ermöglicht es, die Bremseinrichtung auf andere Weise zu betätigen, insbesondere eine Art "Notbremsung" durchzuführen.
- Bevorzugt ist die zweite Betätigungsart der ersten Betätigungsart, die vorzugsweise manuell erfolgt, überlagert und/oder von der ersten Betätigungsart entkoppelt. Dadurch werden zusätzliche Betätigungsarten geschaffen. Bevorzugt sind beide Betätigungsarten unabhängig voneinander durchführbar. Dadurch sind die Betätigungsarten nicht miteinander verknüpft. Insbesondere kann die zweite Betätigungsart erfolgen, ohne dass zuvor die erste Betätigungsart rückgängig gemacht werden muss oder umgekehrt.
- Bei einer vorteilhaften Ausgestaltung der Erfindung ist es denkbar, die Bremse zunächst nach der ersten Betätigungsart einzustellen und bei Bedarf die Bremse nach der zweiten Betätigungsart zu verstellen und/oder nachzustellen, vorzugsweise stärker anzuziehen. Das kann nach der zweiten Betätigungsart gegebenenfalls so weit gehen, dass die Bremse die Winde oder Winsch quasi blockiert, insbesondere reib- und/oder kraftschlüssig. Dadurch wird ein unbeabsichtigtes Abziehen der Ankerkette bzw. der Trosse oder des Festmachers zuverlässig vermieden.
- Bevorzugt ist es vorgesehen, die Bremse für die Durchführung der zweiten Betätigungsart mit einem motorischen oder hydraulischen Antrieb zu versehen. Wenn die erste Betätigungsart bevorzugt manuell erfolgt, kann nach der zweiten Betätigungsart die Bremse automatisch und gegebenenfalls ferngesteuert betätigt werden. Dadurch kann die Bremse nach der zweiten Betätigungsart gezielt automatisch verstellt, insbesondere den Bedürfnissen entsprechend weiter angezogen werden.
- Gemäß einer bevorzugten Weiterbildungsmöglichkeit der Winde weist die Betätigungseinrichtung der Bremse auch eine vorzugsweise handbetätigte Spindel mit einer Spindelmutter auf. Diese dienen insbesondere zur Durchführung der ersten Betätigungsart. Weiterhin kann es vorgesehen sein, dem Linearantrieb ein Ende eines Führungsarms zuzuordnen und das gegenüberliegende Ende des Führungsarms auf der Schwenkachse des doppelarmigen Hebels schwenkbar zu lagern. Auf diese Weise lässt sich eine die handbetätigte Spindel mit einer Spindelmutter aufweisende handelsübliche Betätigungseinrichtung der Bremse mit dem zusätzlichen Linearantrieb für die motorisch bzw. hydraulisch erfolgende zweite Betätigungsart versehen.
- Bevorzugt sind der Linearantrieb und/oder der Führungsarm an der Spindelmutter oder an der Spindel für die erste Betriebsart angelenkt. Dadurch kann in der ersten Betätigungsart über die Spindel unter Zuhilfenahme der Spindelmutter die Bremse zum Beispiel handbetätigt werden und vom sich an der Spindelmutter abstützenden Linearantrieb unabhängig von der Spindel die Bremse nach der zweiten Betätigungsart verstellen. Alternativ ist es auch denkbar, dass der Linearantrieb nicht zusammen mit dem Führungsarm an der Spindelmutter angelenkt ist, sondern der Linearantrieb am sich an der Spindelmutter abstützenden Führungsarm angreift.
- Nach einer bevorzugten Weiterbildung der Winde ist eine Messeinrichtung zur Ermittlung der Belastung des Antriebs der Winde und/oder der Zuglast in der Ankerkette, der Trosse, des Festmachers oder dergleichen vorgesehen. Alternativ oder zusätzlich kann die Messeinrichtung auch zur Ermittlung eines eventuellen Schlupfs der Bremse dienen. Durch den mindestens einen in kontinuierlichen, insbesondere regelmäßig aufeinanderfolgenden Zeitabständen von der jeweiligen Messeinrichtung ermittelten Messwert kann festgestellt werden, welche Belastung insbesondere von der Ankerkette, dem Festmacher und/oder der Trosse auf die Winde ausgeübt wird. Wenn diese Belastung einen bestimmten Wert überschreitet, kann insbesondere zur Vermeidung einer Überlast des Antriebs der Winde die Bremse nach der zweiten Betriebsart gemäß dem zusätzlichen Linearantrieb fester angezogen werden, und zwar gegebenenfalls so weit, dass die Bremse reib- und/oder kraftschlüssig quasi blockiert ist. Dadurch wird ein ungewolltes Abziehen der Ankerkette, der Trosse oder des Festmachers von der Winde vermieden. Die Messeinrichtung kann auch zur Ermittlung einer nachlassenden Belastung dienen, die ein weiteres Einholen der Ankerkette bzw. Anziehen des Festmachers oder der Trosse zulässt, indem der Antrieb nach vorherigem Lösen der Bremse wieder in Gang gesetzt wird. Dadurch wird die quasi erfolgende "Notbremsung" der Winde bei einer Überlast sofort wieder automatisch rückgängig gemacht, sobald die Überlast beseitigt oder abgeklungen ist.
- Nach einer anderen denkbaren Ausgestaltungsmöglichkeit der Winde ist eine Steuerung vorgesehen, die in Abhängigkeit von mindestens einem mit der Messeinrichtung aufgenommenen Messwert den Linearantrieb betätigt, insbesondere derart, dass er die Bremskraft der Bremse in Abhängigkeit von der von der Steuerung vorgenommenen Reaktion auf die ermittelten Messwerte automatisch verändert.
- Bevorzugte Ausführungsbeispiele der Erfindung werden nachfolgend anhand der Zeichnung näher erläutert. In dieser zeigen:
- Fig. 1
- eine perspektivische Ansicht einer als Ankerwinde ausgebildeten Winde,
- Fig. 2
- eine Seitenansicht der Winde der
Fig. 1 bei gelöster Bremse, - Fig. 3
- eine Seitenansicht der Winde der
Fig. 1 bei maximal angezogener Bremse, - Fig. 4
- einen Teil einer Betätigungseinrichtung der Bremse in einer Stellung der
Fig. 2 , - Fig. 5
- eine Seitenansicht des in der
Fig. 4 gezeigten Teils der Betätigungseinrichtung in einer Stellung gemäß derFig. 3 , - Fig. 6
- eine perspektivische Darstellung eines Teils der in der
Fig. 4 gezeigten Betätitgungseinrichtung gemäß einem alternativen Ausführungsbeispiel der Erfindung, und - Fig. 7
- einen in der
Fig. 6 gezeigten Teil der Betätigungseinrichtung in einer Darstellung analog zurFig. 5 . - Die Figuren zeigen eine als Ankerwinde 10 ausgebildete Winde. Mindestens eine solche Ankerwinde ist üblicherweise an Deck größerer kommerziell eingesetzter Schiffe, insbesondere seegängiger Schiffe wie Containerschiffe, Stückgutfrachter, Tanker, Fähren, Kreuzfahrtschiffe, Schlepper oder dergleichen angeordnet. Die Ankerwinde 10 dient zum Ablassen und Aufholen eines Ankers mit seiner Ankerkette. Der Anker und die Ankerkette sind in den Figuren nicht gezeigt.
- Die Ankerkette ist im Bereich der Ankerwinde 10 um einen Teil, beispielsweise ein bis zwei Drittel, einer Kettennuss 11 der Ankerwinde 10 herumgelegt. Dabei liegen mehrere benachbarte Kettenglieder der Ankerkette teilweise in Kettengliederaufnahmen 12 der Kettennuss 11. Die Kettengliedaufnahmen 12 sind im Umfang der Mantelfläche der Kettennuss 11 angeordnet und dienen so zur formschlüssigen Ankopplung und Mitnahme der Ankerkette durch die drehend angetriebene Kettennuss 11.
- Die Kettennuss 11 ist um eine sich durch ihre Längsmittelachse erstreckende Antriebswelle 13 an gegenüberliegenden Lagern an einem Lagerbock 14 der Ankerwinde 10 drehend antreibbar gelagert. Der Lagerbock 14 ist fest auf Deck des betreffenden Schiffs montiert. Die Antriebswelle 13 ist mit einem in den Figuren nicht gezeigten elektrischen oder hydraulischen Antrieb gekoppelt.
- Die Ankerwinde 10 verfügt auch über eine Bremseinrichtung mit einer Bremse, die im gezeigten Ausführungsbeispiel als Bandbremse 15 ausgebildet ist. Die Brandbremse 15 ist an einer Seite neben der Kettennuss 11 angeordnet. Im gezeigten Ausführungsbeispiel ist dazu eine Bremstrommel 16 mit einer zylindrischen Bremsfläche 17 neben der Kettennuss 11 drehfest auf der Antriebswelle 13 befestigt. Ein Großteil der zylindrischen Bremsfläche 17 der Bremstrommel 16 ist von einem mindestens teilweise elastischen Bremsband 18 umschlungen. Durch Zusammenbewegen gegenüberliegender Enden 19, 20 des Bremsbands 18 wird es gegen die Bremsfläche 17 der Bremstrommel 16 gepresst und dadurch die Brandbremse 15 angezogen (
Fig. 2 ). Dazu ist ein Ende 19 des Bremsbands 18 fest mit dem Lagerbock 14 der Ankerwinde 10 verbunden, während das gegenüberliegende Ende 20 des Bremsbands 18 beweglich ist. - Die Bremseinrichtung der Ankerwinde 10 verfügt des Weiteren über ein Betätigungsmittel, das am beweglichen Ende 20 des Bremsbands 18 angreift und zum Lösen sowie bedarfsweisen Anziehen der Bandbremse 15 dient. Zum Anziehen der Bandbremse 15 zieht das Betätigungsmittel am beweglichen Ende 20 des Bremsbands 18. Zum Lösen der Brandbremse 15 lässt die Betätigungseinrichtung das bewegliche Ende 20 des Bremsbands 18 ganz oder teilweise los.
- In den
Fig. 2 bis 4 ist ein erstes Ausführungsbeispiel des Betätigungsmittels der Bandbremse, und zwar eine Betätigungseinrichtung 21, dargestellt. Diese Betätigungseinrichtung 21 weist einen mit dem beweglichen Ende 20 des Bremsbands 18 gelenkig verbundenen Koppelarm 22 aus beispielsweise zwei mit geringem parallelen Abstand nebeneinanderliegenden länglichen Laschen, einen doppelarmigen Hebel 23 und einen ebenfalls aus zwei mit geringem Abstand parallel nebeneinanderliegenden länglichen Laschen gebildeten Führungsarm 24 auf. Weiterhin verfügt die Betätigungseinrichtung 21 über eine von einem Handrad 25 am oberen Ende 39 drehbare längliche Gewindespindel 26 mit einer darauf gelagerten Spindelmutter 27 zur Herbeiführung einer ersten Betätigungsart und einen als Hydraulikzylinder 26 ausgebildeten Druckmittelzylinder zur Herbeiführung einer zweiten Betätigungsart. - Der doppelarmige Hebel 23 ist zwischen einem kurzen Hebelarm 30 und einem langen Hebelarm 31 um eine fest am Lagerbock 14 gelagerte Schwenkachse 32 verschwenkbar. Ein freies Ende 33 des kurzen Hebelarms 30 des doppelarmigen Hebels 23 ist gelenkig bzw. drehbar mit dem dem beweglichen Ende 20 des Bremsbands 18 gegenüberliegenden Ende des Koppelarms 22 verbunden. Ein gegenüberliegendes Ende 34 des langen Hebelarms 31 des doppelarmigen Hebels 23 ist mit einem kolbenstangenseitigen Ende 35 des Hydraulikzylinders 28 schwenkbar bzw. gelenkig verbunden. Ein gegenüberliegendes, zylinderseitiges Ende 36 des Hydraulikzylinders 28 ist im Ausführungsbeispiel der
Fig. 1 bis 5 gelenkig bzw. drehbar an der Spindelmutter 27 angelenkt. Der Führungsarm 24 ist mit einem Ende 37 drehbar bzw. schwenkbar auf der festen Schwenkachse 32 gelagert und das gegenüberliegende Ende 38 drehbar bzw. schwenkbar an die Spindelmutter 27 angelenkt. - Das mit dem Handrad 25 verbundene obere Ende 39 der Gewindespindel 26 ist um eine quergerichtete Achse schwenkbar, ansonsten aber ortsfest an einem Haltearm 40 des Lagerbocks 14 der Ankerwinde 10 befestigt. Dadurch bewegt sich beim am Handrad 25 manuell erfolgenden Drehen der Gewindespindel 26 die Spindelmutter 27 je nach Drehrichtung des Handrads 25 in die eine oder andere Richtung entlang der Längsachse der Gewindespindel 26, also gemäß den Darstellungen in den
Fig. 2 und3 nach oben bzw. nach unten. Dabei wird vom Führungsarm 24 der Abstand der Spindelmutter 27 zur Schwenkachse 32 konstant gehalten, so dass aufgrund der am oberen Ende 39 um eine Querachse schwenkbaren festen Lagerung der Gewindespindel 26 am Lagerbock 14 die Längsachse der Gewindespindel 26 abgestützt gegen seitliches Verschwenken. Auf diese Weise wirkt der unbetätigte Hydraulikzylinder 28 als Koppelglied zwischen der Spindelmutter 27 und dem Ende 34 des langen Hebelarms 31 des doppelarmigen Hebels 23, so dass bei vom oberen Ende 39 der Gewindespindel 26 wegbewegter Spindelmutter 27 vom sich an derselben abstützenden Hydraulikzylinder 28 der doppelarmige Hebel 23 um die ortsfeste Schwenkachse 32 gegen den Uhrzeigersinn verschwenkt wird, wodurch vom Ende 33 des kurzen Hebelarms 30 des doppelarmigen Hebels 23 das bewegliche Ende 20 zum festen Ende 19 des Bremsbands 18 gezogen wird und dadurch ein Anziehen der Bandbremse 15 durch Andrücken und Anschmiegen des Bremsbands 18 an die Bremsfläche 17 der Bremstrommel 16 herbeigeführt wird (Fig. 3 ). - Die
Fig. 6 und7 zeigen ein alternatives Ausführungsbeispiel einer Betätigungseinrichtung 41 zum Anziehen und Lösen der Bandbremse 15 der Ankerwinde 10. Prinzipiell entspricht diese Betätigungseinrichtung 41 der Betätigungseinrichtung 21, weswegen für gleiche Teile gleiche Bezugsziffern verwendet werden. - Der einzige Unterschied der Betätigungseinrichtung 41 zur Betätigungseinrichtung 21 besteht darin, dass das zylinderseitige Ende 36 des Hydraulikzylinders 28 nicht an der Spindelmutter 27 angelenkt ist, sondern am Führungsarm 24, und zwar benachbart zum Ende 38 des Führungsarms 24, womit dieser an der Spindelmutter 27 angelenkt ist. Dazu verfügt der Führungsarm 24 in der Nähe seines mit der Spindelmutter 27 gelenkig verbundenen Endes 38 über eine parallel zur Schwenkachse 32 verlaufende Drehachse 42. Auf dieser Drehachse 42 ist das zylinderseitige Ende 36 des Hydraulikzylinders 28 schwenkbar gelagert. Da die Drehachse 42 außermittig zwischen den Enden 37, 38 des Führungsarms 24 liegt, findet die Krafteinleitung vom Hydraulikzylinder 28 im Gegensatz zum Ausführungsbeispiel der
Fig. 2 bis 5 nicht direkt in die Spindelmutter 27 statt, sondern in der Nähe der Spindelmutter 27 in den Führungsarm 24. Außerdem liegen dadurch die Enden 37 und 38 des Hydraulikzylinders 28 im eingefahrenen Zustand desselben näher beieinander als im Ausführungsbeispiel derFig. 2 bis 5 . Ansonsten ist die Wirkungsweise und Funktion des Hydraulikzylinders 28 beim Ausführungsbeispiel derFig. 6 und7 identisch oder zumindest vergleichbar mit dem Ausführungsbeispiel derFig. 2 bis 5 . - Die Ankerwinde 10 verfügt über eine in den Figuren nicht dargestellte Messeinrichtung zur Messung ihrer Belastung. Die Belastung kann gemessen werden durch die Leistungsaufnahme des elektromotorischen oder hydraulischen Antriebs der Kettennuss 11. Die Messung kann aber auch durch Ermittlung der Spannung in der Antriebswelle des Motors oder der Antriebswelle 13 der Kettennuss 11 erfolgen, beispielsweise über Dehnungsmessstreifen. Alternativ oder zusätzlich kann die Messung oder Belastung auch durch Ermittlung der Spannung in der Ankerkette erfolgen. Dazu kann beispielsweise mindestens einem Kettenglied der Ankerkette eine Spannungsmesseinrichtung, beispielsweise auf der Basis mindestens eines Dehnungsmessstreifens, zugeordnet sein. Die so von der Ankerkette dann ermittelten Zug- bzw. Lastwerte werden vorzugsweise telemetrisch an eine Steuerung der Ankerwinde 10 übertragen. Die Messung der Belastung, sei es am Antrieb, der Antriebswelle 13 und/oder der Ankerkette erfolgt bevorzugt kontinuierlich durch aufeinanderfolgende Messungen, insbesondere in regelmäßigen Zeitabständen aufeinanderfolgende Messungen. Die gemessene Belastung bzw. die Messwerte können in eine Steuerung für den Hydraulikzylinder 28 eingegeben werden, der dann lastabhängig betätigt wird, insbesondere zum bedarfsweisen Festziehen und/oder Lösen der Bandbremse 15.
- Die in den
Fig. 1 bis 3 gezeigte Ankerwinde 10 kann eine zusätzliche nicht dargestellte Winsch mit einer Winschtrommel für Festmacher oder sonstige Trossen, beispielsweise Schlepptrossen, aufweisen. Die Winsch ist über eine Kupplung und/oder ein Getriebe mit dem Antrieb der Kettennuss 11 der Ankerwinde 10 verbunden. Das Getriebe ist vorzugsweise so ausgelegt, dass entweder die Kettennuss 11 vom Antrieb drehend angetrieben wird oder die Winschtrommel der Winsch. Der Winsch bzw. Winschtrommel ist vorzugsweise eine separate Bremseinrichtung mit einer eigenen Betätigungseinrichtung zugeordnet. Auf diese Weise kann mit dem einzigen Antrieb der Ankerwinde 10 wahlweise die Kettennuss 11 zum Fieren oder Dichtholen bzw. Aufholen des Ankers betrieben werden oder die Winsch zum Dichtholen oder Fieren eines Festmachers bzw. einer Schlepptrosse. - Die Erfindung eignet sich auch für Ankerwinden und/oder Winschen, die anstatt einer Bandbremse 15 über eine andere Bremse bzw. Bremseinrichtung verfügen, beispielsweise eine Trommel-, Scheiben- oder Backenbremse.
- Im Folgenden wird das erfindungsgemäße Verfahren im Zusammenhang mit der in den
Fig. 1 bis 5 dargestellten Ankerwinde 10 nach dem ersten Ausführungsbeispiel der Erfindung näher erläutert:
Durch manuelles Betätigen der Gewindespindel 26 am Handrad 25 wird das Bremsband 18 so weit angezogen, dass beim Ankern die Ankerkette mit dem Anker allmählich gefiert, also abgesenkt, wird. Dabei lässt das Bremsband 18 noch einen Schlupf an der Bremsfläche 17 der Bremstrommel 16 zu. - Sobald der Anker ausreichend abgelassen und damit der Ankervorgang beendet ist, wird über das Handrad 25 die Bandbremse 15 stärker angezogen, so dass der Anker über seine Ankerkette und die Ankerwinde 10 gehalten wird. Das geschieht durch einen Kraft- und Reibschluss zwischen dem Bremsband 18 und der Bremstrommel 16 der Bandbremse 15 sowie einem Formschluss zwischen einigen Gliedern der Ankerkette und der Kettennuss 11 der Ankerwinde 10.
- Im Vorstehenden wurde die Betätigung der Ankerwinde 10 nach einer ersten Betätigungsart beschrieben. Im gezeigten Ausführungsbeispiel erfolgt diese erste Betätigungsart manuell mittels der vom Handrad 25 drehend angetriebenen Gewindespindel 26 und unter Einbeziehung der Betätigungseinrichtung 21.
- Soll nun der Anker mit der Ankerkette wieder hochgeholt werden, wird die Ankerwinde 10 durch einen nicht gezeigten hydraulischen oder elektromotorischen Antrieb in entsprechender Drehrichtung angetrieben. Zuvor wird die Brandbremse 15 ganz oder wenigstens teilweise gelöst. Dies kann nach der ersten Betätigungsart manuell erfolgen durch Drehen der Gewindespindel 26 vom Handrad 25 aus.
- Es können beim Aufholen des Ankers Situationen eintreten, bei denen die Kraft oder Leistung des Antriebs nicht ausreicht, um den Anker hochzuholen oder weiter hochzuholen. Beispielsweise kann das geschehen, wenn der Anker im Grund, vorzugsweise steinigem Grund, hakt und/oder starker Wind und damit verbundener starker Seegang eine so hohe Kraft auf das Schiff ausüben, dass die Ankerkette einer übermäßigen Zugbelastung ausgesetzt wird.
- Falls durch die vorstehend beispielhaft, aber nicht abschließend beschriebenen Einflüsse der Antrieb der Ankerwinde 10 nicht in Lage ist, den Anker überhaupt weiter aufzuholen, besteht die Gefahr, dass die hohe Spannung der Ankerkette den Antrieb zurückdreht und es dabei statt eines Hochholens des Ankers zum Abziehen der Ankerkette von der Ankerwinde 10 kommt. Dann hält nicht mehr der Antrieb der Ankerwinde 10 die Ankerkette; das Gegenteil tritt ein, indem die Ankerkette von der Ankerwinde 10 unter drehender Mitnahme der Kettennuss 11 und der Antriebswelle 13 mit der Bremstrommel 16 von der Ankerwinde 10 abgezogen wird. Daraus kann die Gefahr des Verlusts des Ankers mit der Ankerkette resultieren. Um diesem entgegenzuwirken, sieht das Verfahren eine zweite Betätigungsart der Ankerwinde 10, und zwar insbesondere der Betätigungseinrichtung 21 der Bandbremse 15 der Ankerwinde 10, vor.
- Die zweite Betätigungsart der Betätigungseinrichtung 21 erfolgt durch einen Antrieb, und zwar im gezeigten Ausführungsbeispiel dem der Betätigungseinrichtung 21 des Bremsbands 18 zugeordneten Hydraulikzylinder 28. Dieser kann ohne manuellen Eingriff automatisch die Brandbremse 15 weiter anziehen, und zwar so weit, dass ein unbeabsichtigtes Abziehen der Ankerkette von der Ankerwinde 10 auch unter ungünstigsten Bedingungen nicht mehr erfolgen kann. Die zweite Betätigungsart, die im gezeigten Ausführungsbeispiel vom Hydraulikzylinder 28 oder auch einem ähnlichen Linearantrieb erfolgt, stellt so einen Notstop und/oder eine Notbremsung dar.
- Der Hydraulikzylinder 28 zieht mittels der Betätigungseinrichtung 21 das Bremsband 18 dadurch an, dass er durch Ausfahren (vgl.
Fig. 2 und3 ) den doppelarmigen Hebel 23 der Betätigungseinrichtung 21 gegen den Uhrzeigersinn um die Schwenkachse 32 verschwenkt, wodurch vom kurzen Hebelarm 30 des doppelarmigen Hebels 23 der Koppelarm 22 etwa in Richtung zum Handrad 25 gezogen wird. Dabei wird das bewegliche Ende 20 des Bremsbands 18 dichter an das feste Ende 19 des Bremsbands 18 bewegt und dadurch das Bremsband 18 mit größerer Spannung um die Bremsfläche 17 der Bremstrommel 16 herumgelegt. Mit anderen Worten schmiegt sich dadurch das Bremsband 18 fester an die zylindrische Bremsfläche 17 der Bremstrommel 16 an. Auf diese Weise kann vom Hydraulikzylinder 28 nach der von ihm erfolgenden zweiten Betätigungsart der Ankerwinde 10 die Bandbremse 15 gegebenenfalls so sehr angezogen werden, dass die Bandbremse 15 die Antriebswelle 13 mit der darauf unverdrehbar gehaltenen Kettennuss 11 quasi unverdrehbar fixiert, und zwar durch Reib- und/oder Kraftschluss zwischen dem entsprechend stark angezogenen Bremsband 18 und der Bremsfläche 17 der Bremstrommel 16. Dadurch ist ein Schlupf zwischen der Bremsfläche 17 und dem Bremsband 18 auch unter ungünstigsten Bedingungen nicht mehr möglich. - Bevorzugt erfolgt die Steuerung oder Regelung des die zweite Betätigungsart herbeiführenden Hydraulikzylinders 28 lastabhängig. Dazu sind dem Antrieb der Ankerwinde 10, der Kettennuss 11 und/oder ihrer Antriebswelle 13 mindestens ein Lastsensor oder Kraftsensor zugeordnet. Dieser misst kontinuierlich, und zwar entweder permanent oder in regelmäßigen Zeitabständen, die Leistung oder Kraft, die beim Hochholen oder Dichtholen des Ankers vom Antrieb aufgebracht oder auf ihn ausgeübt wird. Alternativ oder zusätzlich kann aber die Last, die auf die Ankerwinde 10 wirkt, auch anders gemessen werden, beispielsweise durch Dehnungsmessstreifen, die der Antriebswelle 13 mit der Kettennuss 11, dem Antriebsstrang der Antriebswelle 13 und/oder in oder an der Ankerkette vorgesehen sind. Denkbar sind auch mehrere redundante Messwertaufnehmer an der gleichen oder an verschiedenen Stellen der Ankerwinde 10 und/oder der Ankerkette.
- Wird vom mindestens einen Leistungs-, Kraft- oder Lastaufnehmer festgestellt, dass eine bestimmte Grenzlast oder Grenzkraft überschritten wird, kann von der Steuerung der Antrieb der Ankerwinde 10 stillgesetzt werden, bevor er Schaden nimmt oder gar zurückgedreht wird und gleichzeitig oder mit etwas Zeitversatz vorher oder nachher, gemäß der zweiten Betätigungsart vom Hydraulikzylinder 28 das Bremsband 18 soweit nach Art einer "Notbremsung" angezogen wird, dass die auf die Ankerwinde 10 einwirkende Belastung unter keinen Umständen die Ankerkette von der Ankerwinde 10 abzieht, indem die Kettennuss 11 von der Last des Ankers und der Ankerkette entgegen der Richtung gedreht wird, in der der Antrieb die Kettennuss 11 zum Hochholen des Ankers mit der Ankerkette dreht und dabei die Ankerkette von der Ankerwinde 10 abgezogen wird.
- Die Last- oder Kraftmesseinrichtung kann auch dazu dienen, nach der gemäß der zweiten Betätigungsart erfolgenden "Notbremsung" der Ankerwinde 10 gegen unbeabsichtigtes Abziehen der Ankerkette die auf die Ankerwinde 10 und/oder Ankerkette ausgeübte Kraft oder Last weiterhin zu messen, um im Falle des Nachlassens oder Abschwellens der Überlast und Unterschreiten des Grenzwerts der Belastung des Antriebs der Ankerwinde 10 vom Hydraulikzylinder 28 nach der zweiten Betätigungsart die Bandbremse 15 wieder gelöst wird und der Antrieb erneut in Gang gesetzt wird, um bei nachlassender Belastung der Ankerwinde 10 den Anker mit der Ankerkette wieder dichtzuholen.
- Das erfindungsgemäße Verfahren läuft mit der alternativ ausgebildeten Betätigungseinrichtung 41 gemäß den
Fig. 6 und7 genauso ab wie vorstehend beschrieben. - Die Erfindung eignet sich nicht nur für die zuvor beschriebene Ankerwinde 10, sondern auch für Winschen zum Dichtholen und kontrollierten Fieren von Trossen, beispielsweise Schlepptrossen und/oder Festmachern. Genauso ist das erfindungsgemäße Verfahren mit Winschen durchführbar. Eine solche Winsch kann der gezeigten Ankerwinde 10 zugeordnet sein, so dass diese umschaltbar ist von Ankerbetrieb auf Winschbetrieb und dadurch wahlweise zum Ablassen oder Dichtholen eines Ankers mit einer Ankerkette, aber auch zum Dichtholen oder Fieren von Trossen und Festmachern geeignet ist. Genauso eignet sich die Erfindung auch für Winschen, die nicht wahlweise auch als Ankerwinde 10 einsetzbar sind. Dann wird im Prinzip die Kettennuss 11 der in den Figuren gezeigten Ankerwinde 10 ersetzt durch eine Winschtrommel.
Claims (14)
- Verfahren zum Handhaben von Decksgeschirr auf Schiffen mit einer Winde zum Fieren und Dichtholen einer Ankerkette mit einem Anker, einer Trosse oder einer Schleppleine, wobei durch Lösen einer Bremse der Winde die Ankerkette mit dem Anker bzw. der Trosse oder dem Festmacher abgelassen und bei genügend gefierter Ankerkette, Trosse oder Festmacher die Bremse gemäß einer ersten Betätigungseinrichtung angezogen wird, und wobei die Ankerkette mit dem Anker, die Trosse oder der Festmacher bei gelöster Bremse von einem Antrieb der Winde dichtgeholt wird, dadurch gekennzeichnet, dass beim Überschreiten einer bestimmten Belastung des Antriebs der Winde die Bremse nach einer zweiten Betätigungsart angezogen wird.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Belastung des Antriebs der Winde beim Dichtholen der Ankerkette, der Trosse oder des Festmachers gemessen wird, vorzugsweise fortlaufend, und beim Überschreiten einer vorbestimmten Belastung die Bremse nach der zweiten Betätigungsart angezogen bzw. stärker angezogen wird und/oder der Antrieb gestoppt wird.
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die auf die Ankerkette, die Trosse und/oder den Festmacher einwirkende Kraft mindestens bei angezogener Bremse ermittelt wird, vorzugsweise fortlaufend, und bei Unterschreiten einer vorgegebenen Maximallast des Antriebs der Winde die Bremse nach der zweiten Betätigungsart wieder gelöst und die Winde wieder angetrieben wird.
- Verfahren nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass die zweite Betätigungsart durch einen Antrieb einer Betätigungseinrichtung (21) der Bremse erfolgt, vorzugsweise durch einen motorischen oder hydraulischen Betrieb der Betätigungseinrichtung (21).
- Winde für Decksgeschirr von Schiffen, insbesondere mit von einem Antrieb drehend antreibbaren Mitnahmemittel für zum Beispiel eine Ankerkette, einen Festmacher oder eine Trosse und mindestens eine dem Mitnahmemittel zugeordnete Bremse mit einer nach einer ersten Betätigungsart und bedarfsweise von einer zweiten Betätigungsart betätigbaren Betätigungseinrichtung (21), dadurch gekennzeichnet, dass die Betätigungseinrichtung (21) der Bremse einen um eine ortsfeste Schwenkachse (32) verschwenkbaren doppelarmigen Hebel (23) aufweist, dessen erster Hebelarm (30) gelenkig mit einem an der Bremse angelenkten Koppelarm (22) verbunden ist und am zweiten Hebelarm (31) ein Linearantrieb für die zweite Betätigungsart angekoppelt ist.
- Winde nach Anspruch 5, dadurch gekennzeichnet, dass beide Betätigungsarten voneinander unabhängig durchführbar sind und/oder die zweite Betätigungsart der ersten Betätigungsart überlagert ist.
- Winde nach Anspruch 5 oder 6, dadurch gekennzeichnet, dass die Betätigungseinrichtung der Bremse zuerst nach der ersten Betätigungsart einstellbar ist und bei Bedarf nach der zweiten Betätigungsart nachziehbar und/oder verstellbar ist.
- Winde nach einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, dass die Betätigungseinrichtung (21) für die zweite Betätigungsart einen motorischen und/oder hydraulischen Antrieb aufweist.
- Winde nach Anspruch 5, dadurch gekennzeichnet, dass die Betätigungseinrichtung (21) der Bremse eine vorzugsweise handbetätigbare Gewindespindel (26) mit einer Spindelmutter (27) aufweist, wobei an der Spindelmutter (27) der Linearantrieb und/oder ein Ende (38) eines Führungsarms (24) angelenkt sind, und ein gegenüberliegendes Ende (37) des Führungsarms (24) auf der Schwenkachse (32) des doppelarmigen Hebels (23) gelagert ist.
- Winde nach Anspruch 9, dadurch gekennzeichnet, dass der Führungsarm (24) und/oder der Linearantrieb an der Spindelmutter (25) angelenkt sind.
- Winde nach Anspruch 9, dadurch gekennzeichnet, dass der Linearantrieb am Führungsarm (24) angelenkt ist.
- Winde nach einem der Ansprüche 5 bis 11, gekennzeichnet durch eine Messeinrichtung zur Ermittlung der Belastung des Antriebs zum Dichtholen bzw. Fieren der Ankerkette, des Festmachers oder der Trosse und/oder zur Ermittlung eines eventuellen Schlupfs der Bremse.
- Winde nach einem der Ansprüche 5 bis 12, dadurch gekennzeichnet, dass eine Steuerung vorgesehen ist, die in Abhängigkeit vom mindestens einen von der Messeinrichtung aufgenommenen Messwert den Linearantrieb zur entsprechenden Veränderung, mindestens Vergrößerung, der Bremskraft der Bremse betätigt.
- Winde nach einem der Ansprüche 5 bis 13, dadurch gekennzeichnet, dass der Linearantrieb zur Herbeiführung der zweiten Betätigungsart der Bremse, insbesondere ihrer Betätigungseinrichtung (21), mindestens einen Druckmittelzylinder, zum Beispiel einen Hydraulikzylinder (28), und/oder einen motorisch betriebenen Spindeltrieb aufweist.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016002251.5A DE102016002251A1 (de) | 2016-02-26 | 2016-02-26 | Verfahren zum Handhaben von Decksgeschirr auf Schiffen sowie eine Winde für Decksgeschirr von Schiffen |
| PCT/EP2017/000175 WO2017144158A1 (de) | 2016-02-26 | 2017-02-08 | Verfahren zum handhaben von decksgeschirr auf schiffen sowie eine winde für decksgeschirr von schiffen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3419889A1 EP3419889A1 (de) | 2019-01-02 |
| EP3419889B1 true EP3419889B1 (de) | 2019-11-13 |
Family
ID=58044004
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17705012.7A Active EP3419889B1 (de) | 2016-02-26 | 2017-02-08 | Verfahren zum handhaben von decksgeschirr auf schiffen sowie eine winde für decksgeschirr von schiffen |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP3419889B1 (de) |
| JP (1) | JP7029413B2 (de) |
| KR (1) | KR102127694B1 (de) |
| CN (1) | CN109070976B (de) |
| DE (1) | DE102016002251A1 (de) |
| WO (1) | WO2017144158A1 (de) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108061147A (zh) * | 2017-11-07 | 2018-05-22 | 武汉船用机械有限责任公司 | 起锚机机架 |
| CN112357791B (zh) * | 2020-11-20 | 2022-07-19 | 中船华南船舶机械广州有限公司 | 一种起重机的工作方法 |
| CN113702191A (zh) * | 2021-08-24 | 2021-11-26 | 南京中船绿洲机器有限公司 | 一种滚轮掣链器试验方法及装置 |
| CN114802597B (zh) * | 2022-04-25 | 2023-02-28 | 广州航海学院 | 一种锚设备的刹车限位装置间隙的计算方法 |
| CN115140243A (zh) * | 2022-07-08 | 2022-10-04 | 中交四航局江门航通船业有限公司 | 一种遥控锚机系统、方法、装置及存储介质 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1827597A (en) | 1928-09-05 | 1931-10-13 | American Eng Co Ltd | Hand-operated windlass |
| DE1872127U (de) * | 1963-03-06 | 1963-05-16 | Wilhelm Schmidding Fa | Winde, insbesondere schiffswinde. |
| DE1957606A1 (de) * | 1969-11-15 | 1971-05-27 | Uher Patent Ag | Winde fuer Schiffsanker |
| US3603561A (en) | 1969-12-19 | 1971-09-07 | Jered Ind Inc | Anchor windlass for a marine vessel |
| JPS5012668B1 (de) * | 1970-07-03 | 1975-05-13 | ||
| DE2037626A1 (de) * | 1970-07-29 | 1972-02-03 | Demag Kampnagel Gmbh | Vorrichtung zum Betätigen und Lüften einer Bremse, insbesondere einer Kettennußbremse einer Ankerwinde |
| JPS5038707Y2 (de) * | 1972-02-26 | 1975-11-08 | ||
| JPS5019166U (de) * | 1973-06-15 | 1975-03-04 | ||
| SE375288B (de) * | 1973-08-09 | 1975-04-14 | Kockums Mekaniska Verkstads Ab | |
| DE2728724A1 (de) * | 1977-06-25 | 1979-01-11 | Kocks Gmbh Friedrich | Winde mit elektromotor |
| JPS63162790U (de) * | 1987-04-10 | 1988-10-24 | ||
| JP2000016774A (ja) * | 1998-07-03 | 2000-01-18 | Tadano Ltd | ウインチ制御装置 |
| CN2833228Y (zh) | 2005-10-13 | 2006-11-01 | 武汉船用机械有限责任公司 | 锚机用液压制动器 |
| JP5019166B2 (ja) | 2007-04-09 | 2012-09-05 | スズキ株式会社 | 車両の排気装置 |
| JP5012668B2 (ja) | 2008-05-30 | 2012-08-29 | ソニー株式会社 | 画像処理装置、画像処理方法、およびプログラム |
| DE102010005995B4 (de) * | 2010-01-27 | 2012-02-16 | Maschinenfabrik Bröhl GmbH & Co oHG | Vorrichtung zum stationären Anordnen von schwimmenden Körpern |
| CN103539033A (zh) | 2012-07-09 | 2014-01-29 | 江苏海泰船舶成套设备有限公司 | 液压系泊绞车的安全装置 |
| DE102012014463B4 (de) | 2012-07-18 | 2017-05-04 | Macgregor Hatlapa Gmbh & Co. Kg | Ankerwinde mit handbetätigter Spindelbandbremse |
| CN203318646U (zh) * | 2013-06-13 | 2013-12-04 | 浙江海洋学院 | 多功能起锚机 |
| CN103482511B (zh) * | 2013-09-27 | 2016-05-04 | 捷胜海洋装备股份有限公司 | 一种具有双向螺杆的拖缆绞车 |
| JP6363854B2 (ja) | 2014-03-11 | 2018-07-25 | キヤノン株式会社 | 形成方法、および物品の製造方法 |
| CN104196921B (zh) * | 2014-08-25 | 2016-08-17 | 宝鸡石油机械有限责任公司 | 一种锚机用带式刹车装置 |
-
2016
- 2016-02-26 DE DE102016002251.5A patent/DE102016002251A1/de not_active Withdrawn
-
2017
- 2017-02-08 JP JP2018563756A patent/JP7029413B2/ja active Active
- 2017-02-08 CN CN201780024253.4A patent/CN109070976B/zh active Active
- 2017-02-08 KR KR1020187027504A patent/KR102127694B1/ko active IP Right Grant
- 2017-02-08 EP EP17705012.7A patent/EP3419889B1/de active Active
- 2017-02-08 WO PCT/EP2017/000175 patent/WO2017144158A1/de active Application Filing
Non-Patent Citations (1)
| Title |
|---|
| None * |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102127694B1 (ko) | 2020-07-09 |
| WO2017144158A1 (de) | 2017-08-31 |
| JP2019509941A (ja) | 2019-04-11 |
| EP3419889A1 (de) | 2019-01-02 |
| DE102016002251A1 (de) | 2017-08-31 |
| CN109070976B (zh) | 2020-09-04 |
| KR20180127359A (ko) | 2018-11-28 |
| CN109070976A (zh) | 2018-12-21 |
| JP7029413B2 (ja) | 2022-03-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3419889B1 (de) | Verfahren zum handhaben von decksgeschirr auf schiffen sowie eine winde für decksgeschirr von schiffen | |
| DE112009000250B4 (de) | Hebevorrichtung | |
| DE102010005995B4 (de) | Vorrichtung zum stationären Anordnen von schwimmenden Körpern | |
| EP3099564B1 (de) | Wasserfahrzeug, insbesondere schlepper | |
| DE102008035583A1 (de) | Teleskopausleger eines Krans und Verfahren zu seiner Abspannung | |
| DE2744098C2 (de) | Derrick-Kran | |
| DE102020113081A1 (de) | Greifvorrichtung mit Schließantrieb durch übersetzte Kraftvervielfältigung | |
| DE2843285A1 (de) | Hebe- und handhabungsvorrichtung, insbesondere fuer arbeiten auf bzw. ueber dem wasser | |
| DE202013102281U1 (de) | Winde mit Überwachungseinrichtung | |
| DE102009014073B3 (de) | Deckskran | |
| DE2529620C3 (de) | Vorrichtung zum Antrieb eines Transportseiles, insbesondere für die Holzbringung | |
| DE1481879A1 (de) | Hubvorrichtung mit Zusatzgeraet | |
| DE1905388B2 (de) | Vorrichtung zur mechanischen fernsteuerung der bremsen von bootswinden | |
| DE102013211248A1 (de) | Winde für ein Lasttransfersystem an Bord eines Transportmittels | |
| EP0234451B1 (de) | Kran | |
| DE3248207A1 (de) | Kettenzuggeraet fuer rundstahlketten, insbesondere zum verzurren von ankerstegketten und dergleichen | |
| DE20219282U1 (de) | Überlastsicherung für einen Kran | |
| DE1909238C3 (de) | Steuervorrichtung für den Seilzug einer Seilwinde, deren Seiltrommel von einer Einzylinder-Kolben-Dampfmaschine unmittelbar angetrieben ist | |
| DE214598C (de) | Ausrueckbare Kupplung fuer auf gemeinsamer Achse angeordnete Windetrommeln | |
| DE1040405B (de) | ||
| DE102021113314A1 (de) | Hubsystem und -verfahren für einen Kran | |
| DE917893C (de) | Schiffsladeeinrichtung | |
| DE3409C (de) | Greifvorrichtung mit beweglichen Klauen zum Staaken des Heues | |
| DE224217C (de) | ||
| DE276441C (de) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170906 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20190606 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1201397 Country of ref document: AT Kind code of ref document: T Effective date: 20191115 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502017002868 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20191113 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200214 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200313 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200213 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200213 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200313 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502017002868 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 26N | No opposition filed |
Effective date: 20200814 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20200229 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200208 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200229 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200229 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200229 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200208 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200229 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502017002868 Country of ref document: DE Representative=s name: MEISSNER BOLTE PATENTANWAELTE RECHTSANWAELTE P, DE Ref country code: DE Ref legal event code: R081 Ref document number: 502017002868 Country of ref document: DE Owner name: MACGREGOR GERMANY GMBH & CO. KG, DE Free format text: FORMER OWNER: TTS MARINE GMBH, 28195 BREMEN, DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20210208 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210208 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20191113 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1201397 Country of ref document: AT Kind code of ref document: T Effective date: 20220208 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220208 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230131 Year of fee payment: 7 |