CN1226864C - 图象感测设备及黑斑校正方法 - Google Patents
图象感测设备及黑斑校正方法 Download PDFInfo
- Publication number
- CN1226864C CN1226864C CNB021020280A CN02102028A CN1226864C CN 1226864 C CN1226864 C CN 1226864C CN B021020280 A CNB021020280 A CN B021020280A CN 02102028 A CN02102028 A CN 02102028A CN 1226864 C CN1226864 C CN 1226864C
- Authority
- CN
- China
- Prior art keywords
- shading correction
- image sensing
- correction coefficient
- sensing element
- lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/60—Noise processing, e.g. detecting, correcting, reducing or removing noise
- H04N25/63—Noise processing, e.g. detecting, correcting, reducing or removing noise applied to dark current
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/66—Remote control of cameras or camera parts, e.g. by remote control devices
- H04N23/663—Remote control of cameras or camera parts, e.g. by remote control devices for controlling interchangeable camera parts based on electronic image sensor signals
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Studio Devices (AREA)
- Color Television Image Signal Generators (AREA)
- Transforming Light Signals Into Electric Signals (AREA)
- Facsimile Image Signal Circuits (AREA)
Abstract
本发明的目的在于消除图象感测元件平面上的灵敏度不均匀性而与透镜的交换无关。为实现此目的,在一种包括图象感测元件并且可以交换透镜的图象感测设备中,存储器将与图象感测元件平面上的二维矩阵象素分别对应的黑斑校正系数加以存储,并且校正装置通过从存储在存储器的黑斑校正系数中提取出与对应象素关联的黑斑校正系数,对从图象感测元件的各象素读出的象素数据进行校正计算。
Description
技术领域
本发明涉及图象感测设备、黑斑(shading)校正方法、程序以及存储介质,更具体地说,涉及一种采用可互换图象感测透镜的图象感测设备、一种应用于该图象感测设备的黑斑校正方法,以及一种用于存储实施该黑斑校正方法的程序的存储介质。
背景技术
图10方框图表示一例传统透镜可互换的数字静态相机的结构。
参照图10,相机操作开关(switch)43包括一个主SW和释放SW。当照相者操作相机操作开关43时,总控制电路44探测到相机操作开关43状态的改变,并且向其他模块提供电源。
照相镜头范围内的物体图象通过主照相光学系统33形成在图象感测单元34上,从而图象感测单元34将电信号输出至A/D转换器35。对于每个象素电信号被依次转换成既定的数字信号,然后将数字信号传送至处理电路36。处理电路36根据象素数据产生R、G和B颜色信号,并且在照相者进行预照相操作时对于每帧周期性地将所产生结果经由存储控制器37传输至视频存储器41。监视显示器42根据传输至视频存储器41的数据使取景器显示等。
另一方面,当照相者已经在相机操作开关43上进行照相操作时,从处理电路36输出的一帧象素数据响应于来自总控制电路44的控制信号而存储在一个帧存储器38中,总控制电路44用于探测相机操作开关43的状态的改变。然后,帧存储器38中的数据被存储控制器37和工作存储器39压缩成既定的压缩格式,压缩结果存储在外存储器40中。注意外存储器40包括非易失性存储器比如快闪存储器等。
为了根据被摄图象数据显示图象,存储控制器37对于相应的照相象素将存储在外存储器40中的压缩数据解压缩成为正常数据,并且将解压缩结果传输至视频存储器41。监视显示器42根据传输至视频存储器41的数据使取景器显示等。
用在传统透镜可交换数字相机中的图象感测元件对于图象感测元件的相应感光象素采用图11A和11B中所示的微透镜,以便提高每个象素的感光灵敏度。
图11A和11B表示依赖于微透镜位置与来自透镜的入射光角度之间关系产生黑斑(取决于来自透镜的入射光之入射角的空间灵敏度不均匀性)的原理。参照图11A和11B,数标20表示作为向场透镜的透镜;数标21表示微透镜;数标22表示图象感测元件的感光部分。
由于微透镜21设置在图象感测元件象素的相应感光部分22,所以即使当图象感测元件的各感光部分22具有较窄的有效感测区域,边缘光也可以有效地聚焦在感光部分22上。
然而,当通过透镜20的光线几乎垂直地照射在图象感测元件的感光部分22上时,如图11A所示,入射光线聚焦在图象感测元件的感光部分22上而不会导致任何严重的问题。然而,当通过透镜20的光线倾斜地照射在图象感测元件的感光部分22上时,如图11B所示,由于透镜20与微透镜21之间的光学关系,只有某些入射光线入射在离开透镜20光轴的区域(图象感测元件的外围部分)上的各感光部分。
这种光通量下降一般称为白光黑斑(white shading)。随着图象感测元件上象素位置距离透镜20的光轴离开更远,此现象益发显著。
用于校正透镜20与图象感测元件上微透镜21组合产生的白光黑斑的方法例如公开在日本专利公开No.6-197266中。在此方法中,预先在透镜的内存储器中存储黑斑校正数据,并且在照相时读出。根据所读出的数据产生模拟/数字转换电路的参考电压,将模拟感测图象信号根据该参考电压转换成数字信号,从而实现黑斑校正。
当传统的透镜可交换数字相机采用与传统单镜头反射卤化银胶片相机中相同的光学系统(例如可交换透镜系统)时,其所需要的图象感测元件的尺寸比不采用该种光学系统的数字相机的图象感测元件的尺寸要大得多。
然而,在这种大尺寸图象感测元件中,图象感测元件外围部分光线的入射角依赖于透镜变得较大。在此情况下,由于微透镜位置、芯片内滤色器的制造误差、图象感测元件的器件结构等等会造成灵敏度不均匀性(黑斑),即入射角变大的图象感测元件外围部分的灵敏度下降。此问题下面将加以说明。
如图11A和11B所示,最近的固态图象感测元件包括用于将入射光聚焦在光电二极管(图象感测元件的感光部分22)上以提高灵敏度的微透镜21。然而,当入射光的入射角变大时,由微透镜21折射的入射光聚焦在离开各光电二极管中心的位置,从而降低了该象素的灵敏度。
传统上,可以获得考虑到由于形成物象的透镜的特性而使图象感测元件外围部分上入射光之入射角的增大来进行黑斑校正的图象感测设备,如日本专利公开No.6-197266中所公开。然而,在可以交换透镜的图象感测设备系统中,图象感测元件上的入射光线的入射角特性在交换透镜时急剧改变,从而不能精确地进行黑斑校正。
即使在采用单透镜而无需交换透镜时,如果透镜是变焦透镜,则由于透镜的出射光瞳位置在照相视场角改变时或者在透镜对不同距离的物体聚焦时会发生改变,所以图象感测元件外围部分上入射光的入射角会改变,从而不能精确地进行黑斑校正。
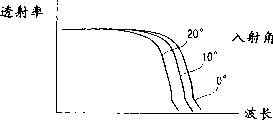
另外,图12A至12C表示由于多层型反射式红外截止滤光片而导致的颜色黑斑的产生原理。图12A表示反射式红外截止滤光片随入射角变化的光谱传输特性。图12B表示一例包括芯片内滤色器的图象感测元件的光谱灵敏度特性,图12C表示红色滤色器象素的灵敏度。图12A至12C例示了具有RGB基色型芯片内滤色器的图象感测元件。注意图12A横坐标上的波长与图12B横坐标上的波长具有相同的数量级量纲。
假设通过具有图12A中所示光谱传输特性的红外截止滤光片的光束入射至具有图12B所示光谱灵敏度特性的图象感测元件中。在此情况下,从图12A和12B可以看出,红外截止滤光片的光谱传输特性在蓝色和绿色滤色器的波长范围内与入射角无关,但是在红色滤色器的波长范围内与入射角密切相关。从图象感测元件输出的信号的感光特性由红外截止滤光片的光谱传输特性与图象感测元件的光谱灵敏度特性的乘积表示。因此,当入射光的入射角较大时,具有红色滤色器的象素会发生灵敏度下降,从而会产生颜色黑斑,即图象感测元件外围部分上只有具有红色滤色器的象素的灵敏度会下降,如图12C所示。
发明内容
本发明已经考虑到上述问题而作出,因而其目的在于提供一种图象感测设备、黑斑校正方法,和存储介质,可以消除图象感测元件上的灵敏度不均匀性,而不管采用可交换透镜的图象感测设备中透镜是否交换。
本发明的另一个目的在于提供一种图象感测设备、黑斑校正方法,和存储介质,可以校正在图象感测元件的特定颜色通道中产生的颜色黑斑。
为了解决前述问题并实现上述目的,根据本发明第一方面的图象感测设备特征在于如下设置。
也即,一种包括图象感测元件并且可以交换透镜的图象感测设备,包括:提取装置,用于提取包含在透镜中的信息;黑斑校正系数获取装置,用于基于由所述提取装置提取的信息,获取关于图象感测元件平面上两个正交方向的黑斑校正系数;以及校正装置,用于根据所述两个正交方向的对应象素的地址从所述黑斑校正系数获取装置获取的黑斑校正系数中选择两个黑斑校正系数,并且使用所选择的两个黑斑校正系数对图象感测元件的对应象素输出的图象数据进行校正计算,其中,包含在透镜中的信息是出射光瞳位置信息,以及所述黑斑校正系数获取装置基于所述出射光瞳位置信息计算关于图象感测元件平面上两个正交方向的黑斑校正系数。
根据本发明第二方面的图象感测设备特征在于如下设置。
也即,一种包括图象感测元件并且可以交换透镜的图象感测设备,包括存储装置,用于存储与图象感测元件的象素分别对应的黑斑校正系数;和校正装置,用于通过从存储在所述存储装置的黑斑校正系数中提取出与对应象素关联的黑斑校正系数,对从图象感测元件的各象素读出的象素数据进行校正计算,其中所述校正装置根据存储在所述存储装置中的黑斑校正系数,对受到不透射特定波长范围并插入在透镜与图象感测元件之间的滤色器影响的象素以及不受该滤色器影响的象素独立地进行校正。
根据本发明第一方面的黑斑校正方法特征在于如下设置。
也即,一种应用于包括图象感测元件并且可以交换透镜的图象感测设备的黑斑校正方法,包括存储步骤,将与图象感测元件平面上的二维矩阵象素分别对应的黑斑校正系数存储在一个存储装置中;和校正步骤,用于通过从存储在所述存储装置的黑斑校正系数中提取出与对应象素关联的黑斑校正系数,对从图象感测元件的各象素读出的象素数据进行校正计算,其中所述存储步骤包括将黑斑校正系数存储在所述存储装置中同时将黑斑校正系数分成沿图象感测元件平面上两个正交方向分量的步骤,并且所述校正步骤包括根据所述两个方向的对应象素地址从存储在所述存储装置的黑斑校正系数中提取出两个黑斑校正系数,并且将从对应象素读出的象素数据依次乘以这两个所提取的黑斑校正系数以校正象素数据的步骤。
根据本发明第二方面的黑斑校正方法特征在于如下设置。
也即,一种应用于包括图象感测元件并且可以交换透镜的图象感测设备的黑斑校正方法,包括:提取步骤,提取包括在透镜中的信息;黑斑校正系数获取步骤,基于在所述提取步骤提取的信息,获取关于图象感测元件平面上两个正交方向的黑斑校正系数;以及校正步骤,根据所述两个正交方向的对应象素的地址从所述黑斑校正系数获取步骤获取的黑斑校正系数中选择两个黑斑校正系数,并且使用所选择的两个黑斑校正系数对图象感测元件的对应象素输出的图象数据进行校正计算,其中,包含在透镜中的信息是出射光瞳位置信息,以及所述黑斑校正系数获取装置基于所述出射光瞳位置信息计算关于图象感测元件平面上两个正交方向的黑斑校正系数。
根据本发明的程序特征在于如下设置。
也即,一种程序用于使计算机实施所述黑斑校正方法。
根据本发明的存储介质特征在于如下设置。
也即,一种存储介质用于计算机可读地存储有所述程序。
根据下面本发明优选实施例的说明,本领域技术人员应当清楚上述目的和优点之外的其他目的和优点。在说明书中参照了附图,且附图构成说明书的一部分并且显示了本发明的一个例子。然而该例子并不能穷尽本发明的各种实施例,因而还应参照说明书之后的权利要求以确定本发明的范围。
附图说明
图1表示根据本发明实施例的图象感测设备(数字静态相机)的结构的方框图;
图2A至2D表示颜色插值处理;
图3A和3B表示黑斑校正系数,用于校正由于透镜和图象感测元件装置结构组合产生的黑斑;
图4A至4C表示本发明实施例中的黑斑校正系数,其中图4A表示图象感测元件的平面,图4B表示黑斑校正系数的水平分量,图4C表示黑斑校正系数的垂直分量;
图5表示从透镜至图象感测元件的光路;
图6表示相对于入射角θ的灵敏度曲线;
图7表示图象感测元件平面上图象高度d的X-和Y-分量;
图8A至8E表示RGB基色Bayer滤色器矩阵,以及对应于该矩阵的黑斑校正系数;
图9表示由地址识别电路执行的既定信号HSEL和VSEL输出过程顺序的流程图;
图10表示传统的透镜可交换数字静态相机的一例结构的方框图;
图11A和11B表示依赖于微透镜位置与来自透镜的入射光角度之间关系产生黑斑的原理;以及
图12A至12C表示由于多层型反射式红外截止滤光片而导致的颜色黑斑的原理。
具体实施方式
下面参照附图说明本发明的优选实施例。
图1表示根据本发明实施例的图象感测设备(数字静态相机)的结构的方框图。该图象感测设备可以变换透镜。
参照图1,数标1表示总控CPU,用于控制整个相机;数标2表示出射光瞳位置探测器;数标3表示可交换透镜。可交换透镜3包括出射光瞳位置信息,探测器2探测包含在可交换透镜3中的出射光瞳位置信息,通过校正探测值而产生编码信息,并且将所产生信息输出至CPU1。
出射光瞳位置信息用于计算黑斑校正系数,后面将详细说明。在计算之前,根据可交换透镜3的变焦位置、聚焦位置、图象高度和孔径值的至少一个对出射光瞳位置信息进行校正。更具体地说,出射光瞳位置一般由透镜与图象感测元件之间的光轴上距离表示,并且随着变焦或聚焦位置的改变而同步改变。同样已经知道,当图象高度(在图象感测元件平面上关注象素的位置与光轴上点之间的距离)改变时出射光瞳位置会稍微改变。另外,当孔径值改变时,照射在图象感测元件的关注象素上光束的入射角范围会改变。由于这些改变在计算黑斑校正系数时以误差形式出现,所以根据可交换透镜3的变焦位置、聚焦位置、图象高度和孔径值的至少一个对出射光瞳位置信息进行校正,以获得精确的黑斑校正。
数标4表示多层型反射式红外截止滤光片;数标5表示图象感测元件。图象感测元件5包括例如电荷转移元件例如CCD等。物体图象通过可交换透镜3形成在图象感测元件5上,然后图象感测元件5对各个象素依次读出作为成象结果积聚的电荷,并且将其输出至CDS/AGC电路6上。CDS/AGC电路6抑制在图象感测元件5中产生的噪声成分例如重置噪声等,然后将电荷信号放大至适当的水平,并将这些信号输出至A/D转换电路7。A/D转换电路7将对应于上述电荷量的物体亮度数据转换成数字数据。由于用以产生颜色信号(例如R、G和B信号)的光学滤色器粘结在图象感测元件5上,所以从图象感测元件5的输出信号依次表示相应颜色。
数标8表示一个驱动器,用于向图象感测元件5的各个元件提供其上积聚电荷所需的电能。更具体地说,驱动器8通过根据从时钟发生器9发出的定时信号对图象感测元件5进行二维扫描来提供电能。
时钟发生器9向地址产生电路10提供水平同步信号HD和垂直同步信号VD,而地址产生电路10根据这些同步信号产生地址信号。
数标12至15表示用于存储进行图象感测元件5(后面将加以说明)的灵敏度校正(黑斑校正)所需校正数据的存储器:数标12表示用于存储第一水平校正数据的H存储器H1;数标13表示用于存储第二水平校正数据的H存储器H2;数标14表示用于存储第一垂直校正数据的V存储器V1;以及数标15表示用于存储第二垂直校正数据的V存储器V2。
地址识别电路11根据从地址产生电路10输出的地址信号将既定的信号HSEL和VSEL加以输出。
数标16和17表示选择器,用于根据从地址识别电路11发出的既定信号HSEL和VSEL来从存储器12至15发出的输出信号中进行选择,并输出水平和垂直校正数据。
数标18表示乘法电路MUL1,用于将从A/D转换电路7输出的各象素输出电平乘以经由选择器16获得的水平校正数据。数标19表示乘法电路MUL2,用于将来自乘法电路(MUL1)18的输出乘以经由选择器17获得的垂直校正数据。
已经经过灵敏度校正(黑斑校正)而从乘法电路(MUL2)19输出的象素数据一般传送至处理电路(未画出),然后经过暗电平(dark level)校正、γ转换和颜色插值处理。处理结果存储在一个存储器(未画出)中。
图2A至2D表示颜色插值处理。图2A表示图象感测元件5的象素矩阵,图2B表示G(绿色)插值滤色器,图2C表示R(红色)/B(蓝色)插值滤色器,图2D表示插值处理之后的象素矩阵。用在图象感测元件中的滤色器矩阵为通常的Bayer矩阵,包括一个用于G的交错矩阵,如图2B所示,和一个用于R/B的直线序列矩阵,如图2C所示。
在单片式图象感测元件的情况下,由于不是所有象素都具有RGB信息,所以通常通过利用图2B和2C所示的3×3矩阵进行插值操作在图象感测元件上的所有象素点处产生RGB颜色信息。下面详细说明该处理。
例如,为了产生图2A中所示象素a的G插值信号,将以虚线a1为界的象素a及其八个周围象素的数据乘以插值滤色器系数,并将其乘积累加。在图2B所示的G插值滤色器中,与虚线a1内G(绿色)象素相对应的系数在象素a位置处为“1”,并且在四个角落的象素位置处为“0”。因此,象素a的数据直接成为G插值信号。
另一方面,例如,为了产生图2A所示象素b的G插值信号,将以虚线b1为界的象素b及其八个周围象素的输出电平数据乘以G插值滤色器系数,并将其乘积累加。在此情况下,在图2B所示的G插值滤色器中,与虚线b1内G(绿色)象素相对应的系数在象素b的上、下、左和右相邻位置处为0.25。因此,象素b的G插值信号为将所述上、下、左和右相邻位置处系数相乘之后将其乘积累加所得的值。换句话说,在此情况下的G插值信号为所述上、下、左和右相邻位置处亮度数据的平均值。
以同样方法,采用与G插值滤色器具有不同系数的R/B插值滤色器来确定对于所有R(红色)/B(绿色)象素的R/B插值信号。
以此方式,最后产生对于所有象素的R、G和B插值信号,如图2D所示。
下面参照图3A和3B以及图4A至4C说明在图1所示图象感测设备中执行的灵敏度校正(黑斑校正)处理。
图3A和3B表示黑斑校正系数,用于校正由于透镜和图象感测元件装置结构组合产生的黑斑。
更具体地说,当出射光瞳位置相当靠近于图象感测元件,并且在图象感测元件的外围部分上灵敏度大幅下降时,将来自图象感测元件的输出信号放大以增大较大图象高度位置处(图象感测元件的外围部分)的黑斑校正系数,如图3A所示。另一方面,当出射光瞳较远并且在图象感测元件的外围部分上灵敏度下降不太大时,将来自图象感测元件的输出信号稍微放大以稍微增大较大图象高度位置处(图象感测元件的外围部分)的黑斑校正系数,如图3B所示。更具体地说,图1中所示的出射光瞳位置探测器2读取可交换透镜3中的出射光瞳位置信息,根据变焦位置或聚焦位置等对其进行校正,并且将所校正信息传送至总控CPU1,总控CPU1根据已校正的出射光瞳位置信息计算出黑斑校正系数。
如果黑斑校正系数严格对应于图象高度加以确定,则其必须设定成以图象感测元件为中心的同心模式,从而使得硬件加工困难。因此,在此实施例中,设定图4A至4C中所示的黑斑校正系数。
图4A至4C表示该实施例中的黑斑校正系数。图4A表示图象感测元件的平面,图4B表示黑斑校正系数的水平分量,图4C表示黑斑校正系数的垂直分量。
更具体地说,将黑斑校正系数设定为增大沿水平方向具有较低灵敏度的图象感测元件左右外围部分的灵敏度,并且将黑斑校正系数设定为增大沿垂直方向具有较低灵敏度的图象感测元件上下外围部分的灵敏度,使得当水平和垂直黑斑校正系数分量在图象平面上彼此相乘时,可以产生假同心校正。如果灵敏度相对于图象感测元件入射光的入射角充分缓慢地改变,则该假同心校正与同心校正相比可以充分确保令人满意的精度,其灵敏度的改变较小,如图6中所示(后面将加以说明)。
下面参照图5至7说明将黑斑校正系数分成图象感测元件上水平和垂直分量的方法。
图5表示从透镜至图象感测元件的光路。参照图5,数标20表示透镜;数标23表示光阑。θ表示光束的入射角,d表示入射在图象感测元件5上的光束至光轴中心的距离,即图象高度,以及p表示透镜20与图象感测元件5之间在光轴上的距离,即出射光瞳位置。
图6表示相对于入射角θ的灵敏度曲线,图7表示图象感测元件5的平面上图象高度d的X-和Y-分量。
假设相对于图象高度d(入射角θ)的灵敏度如图6中所示,并且如果y表示灵敏度且θ表示入射角,则黑斑特性可以近似为如下函数:
y=Atan2θ+Btanθ+C …(1)
tanθ=d/p …(2)
其中A、B和C为常数,d和p如上所述分别为图象高度和出射光瞳位置(距离)。
如图7所示,当具有与X轴形成角度θ′的斜率的图象高度d被分成图象感测元件5平面上的X-和Y-分量dcosθ′和dsinθ′时,可以获得类似于方程(2)的下述方程:
tanθx=(dcosθ′)/p …(3)
tanθy=(dsinθ′)/p …(4)
其中θx和θy为入射角θ在图象感测元件5的平面上的X-和Y-分量。
如果采用该tanθx和tanθy,则灵敏度y可以表示为:
y=(Atan2θx+Btanθx+C)(Atan2θy+Btanθy+C) …(5)
此方程(5)与方程(1)精确相符。
参照上述方程(5),将水平和垂直校正公式设为:
(Atan2θx+Btanθx+C)-1 …(6)
(Atan2θy+Btanθy+C)-1 …(7)
将来自图象感测元件相应象素的输出数据乘以校正公式(6)和(7),计算出水平黑斑校正数据H(i)和垂直黑斑校正数据V(j)。
根据校正公式(6)和(7)对于各象素计算出水平和垂直黑斑校正系数,并且图1中所示总控CPU1将这些系数存储在与H存储器(H1)12和V存储器(V1)14中各象素位置相对应的地址位置中。
以此方式,对于一帧图象感测元件5的输出采用一次水平和垂直黑斑校正系数,对由透镜20与微透镜21之间光学关系导致产生的黑斑进行校正,而不管滤色器的性能等等。也就是说,在图1所示的结构中,乘法电路(MUL1)18用于将从A/D转换电路7输出的各象素输出数据乘以与象素位置对应的水平黑斑校正数据,以进行水平校正,乘法电路(MUL2)19将来自乘法电路18的输出乘以与象素位置对应的垂直黑斑校正数据,从而实现对于一帧图象感测元件5的输出的黑斑校正。
如上所述,在透镜可交换图象感测设备中,透镜存储有出射光瞳位置信息,图象感测设备主体利用照相时透镜的出射光瞳位置信息计算黑斑校正系数来进行黑斑校正。以此方式,即使当透镜被交换时,也可以令人满意地进行黑斑校正。
由于由透镜与图象感测元件装置结构组合产生的黑斑依赖于入射在图象感测元件上的光束的入射角,所以如果在图象感测元件的关注象素位置处探测出照射在该象素上入射光束的入射角,则可以计算出黑斑校正量。也就是说,如果可以获得关注象素处的图象高度和透镜的出射光瞳位置,则可以计算出入射角,从而可以计算出黑斑校正量。此时,若可交换透镜存储有出射光瞳位置信息,并且由图象感测设备主体计算出图象高度,则可以精确地校正由透镜的光学特性和图象感测元件的特定组合所导致的黑斑,而与可交换透镜和图象感测设备主体的组合无关。
根据所述变焦位置、聚焦位置、图象高度和孔径值的至少一个对透镜的出射光瞳位置信息进行校正,将其用于计算黑斑校正系数。因此可以提高黑斑校正精度。
下面说明用于防止依赖于图象感测元件5的器件结构和透镜20(可交换透镜3)的光学条件所产生的颜色黑斑的方法。
若图象感测元件5之前采用多层型反射式红外截止滤光片4,如图5所示,并且图象感测元件5包括图12B中所示的RGB基色Bayer滤色器,则由于对图12A中所示红外截止滤光片光谱传输特性的入射角的依赖,具有红色滤色器的象素的灵敏度极大地依赖于入射角。为此原因,仅在红色通道中产生了相当大的黑斑,如图12C所示,而其他通道中产生的黑斑与红色通道相比可以忽略。
由红外截止滤光片4和可交换透镜3的光学组合所产生的这种颜色黑斑随着红外截止滤光片4外围部分入射光的入射角的增大而变得更加显著,因为可交换透镜3的出射光瞳位置更加靠近图象感测元件5。
图8A至8E表示RGB Bayer滤色器矩阵以及对应于该矩阵的黑斑校正系数。图8A表示RGB Bayer滤色器矩阵,图8B表示与RGB Bayer滤色器第一行对应的黑斑校正系数H1(i)和H2(i),图8C表示与RGB Bayer滤色器第二行对应的黑斑校正系数H1(i)和H2(i),图8D表示与RGB Bayer滤色器第一列对应的黑斑校正系数V1(j)和V2(j),以及图8E表示与RGBBayer滤色器第二列对应的黑斑校正系数V1(j)和V2(j)。
由于RGB基色Bayer滤色器具有如图8A所示的矩阵,所以G和R交替出现在例如第一水平线(第一行)中,位于从左端数每个奇数位置处的象素(G)的输出灵敏度不同于位于每个偶数位置处的象素(R)的输出灵敏度。也就是说,具有R滤色器的各象素的输出大幅度低于外围部分具有G滤色器的象素的输出。为此原因,设定了图8B中所示的黑斑校正系数H1(i)和H2(i)。将黑斑校正系数H1(i)应用于具有R滤色器的象素的输出,并且存储在图1的H存储器(H1)12中。另一方面,将黑斑校正系数H2(i)应用于具有G滤色器的象素的输出,并且存储在图1的H存储器(H2)13中。
由于B和G交替出现在RGB基色Bayer滤色器第二水平线(第二行)中,所以位于从左端数每个奇数位置处的象素(B)的输出灵敏度与位于每个偶数位置处的象素(G)的输出灵敏度近似相同。为此原因,设定了图8C中所示的相同黑斑校正系数H1(i)和H2(i)。将黑斑校正系数H1(i)应用于具有B滤色器的象素的输出,并且存储在图1的H存储器(H1)12中。另一方面,将黑斑校正系数H2(i)应用于具有G滤色器的象素的输出,并且存储在图1的H存储器(H2)13中。
在RGB基色Bayer滤色器的第一垂直线(第一列)中,由于G和B交替出现,所以位于从上端数每个奇数位置处的象素(G)的输出灵敏度与位于每个偶数位置处的象素(B)的输出灵敏度近似相同。为此原因,设定了图8D中所示的相同黑斑校正系数V1(j)和V2(j)。将黑斑校正系数V1(j)应用于具有G滤色器的象素的输出,并且存储在图1的V存储器(V1)14中。另一方面,将黑斑校正系数V2(j)应用于具有B滤色器的象素的输出,并且存储在图1的V存储器(V2)15中。
另一方面,由于R和G交替出现在RGB基色Bayer滤色器的第二垂直线(第二列)中,所以位于从上端数每个奇数位置处的象素(R)的输出灵敏度不同于位于每个偶数位置处的象素(G)的输出灵敏度。也就是说,具有R滤色器的各象素的输出大幅度低于外围部分具有G滤色器的象素的输出。为此原因,设定了图8E中所示的黑斑校正系数V1(j)和V2(j)。将黑斑校正系数V1(j)应用于具有R滤色器的象素的输出,并且存储在图1的V存储器(V1)14中。另一方面,将黑斑校正系数V2(j)应用于具有G滤色器的象素的输出,并且存储在图1的V存储器(V2)15中。
以此方式,设定并存储了黑斑校正系数,将来自图象感测元件5的每一象素亮度数据乘以根据关注象素位置的二维地址读出的对应黑斑校正系数。下面参照图9说明该处理过程。
图9表示由地址识别电路11执行的既定信号HSEL和VSEL输出过程顺序的流程图。
在步骤S1检验从地址产生电路10发送的关注象素二维地址的RGB基色Bayer滤色器垂直(列)方向地址是否为偶数。而且,在步骤S2和S7检验从地址产生电路10发送的关注象素二维地址的RGB基色Bayer滤色器水平(行)方向地址是否为偶数。
在此检验之后,如果关注象素二维地址的RGB基色Bayer滤色器垂直(列)方向地址为奇数(即二维图象感测元件矩阵的奇数行),并且水平(行)方向地址为奇数(即二维图象感测元件矩阵的奇数列),则流程进至步骤S3,地址识别电路11将既定信号HSEL设定为L电平(0电平)。其结果是,选择器16将从H存储器(H1)12输出的黑斑校正系数H1(i)发送至乘法电路(MUL1)18。
在步骤S4,地址识别电路11将既定信号VSEL设定为L电平(0电平)。其结果是,选择器17将从V存储器(V1)14输出的黑斑校正系数V1(j)发送至乘法电路(MUL2)19。
下面参照图8A至8E说明此状态。
也就是说,如果关注象素为图8A中所示上左G象素22,则乘法电路(MUL1)18采用图8B中实线所示的黑斑校正系数H1(i)(H方向的左侧对应于水平方向的较低地址,H方向的右侧对应于水平方向的较高地址)对象素的输出数据进行乘法校正。另一方面,乘法电路(MUL2)19采用图8D中实线所示的黑斑校正系数V1(j)特性(V方向的上侧对应于垂直方向的较低地址,V方向的下侧对应于垂直方向的较高地址)对象素的输出数据进行乘法校正。
另一方面,在上述检验过程之后,如果关注象素二维地址的RGB基色Bayer滤色器垂直(列)方向地址为奇数(即二维图象感测元件矩阵的奇数行),并且水平(行)方向地址为偶数(即二维图象感测元件矩阵的偶数列),则流程进至步骤S5,地址识别电路11将既定信号HSEL设定为H电平(电平1)。继而,选择器16将作为从H存储器(H2)13输出的黑斑校正系数H2(i)发送至乘法电路(MUL1)18。
在步骤S6,地址识别电路11将既定信号VSEL设定为L电平(电平0)。从而,选择器17将作为从V存储器(V1)14输出的黑斑校正系数V1(j)发送至乘法电路(MUL2)19。
例如,如果关注象素为图8A中所示R象素23,则乘法电路(MUL1)18采用图8B中虚线所示的黑斑校正系数H2(i)(H方向的左侧对应于水平方向的较低地址,H方向的右侧对应于水平方向的较高地址)对象素的输出数据进行乘法校正。另一方面,乘法电路(MUL2)19采用图8E中实线所示的黑斑校正系数Vi(j)特性(V方向的上侧对应于垂直方向的较低地址,V方向的下侧对应于垂直方向的较高地址)对象素的输出数据进行乘法校正。
在上述检验过程之后,如果关注象素二维地址的RGB基色Bayer滤色器垂直(列)方向地址为偶数(即二维图象感测元件矩阵的偶数行),并且水平(行)方向地址为奇数(即二维图象感测元件矩阵的奇数列),则流程进至步骤S8,地址识别电路11将既定信号HSEL设定为L电平(0电平)。因此,选择器16将从H存储器(H1)12输出的黑斑校正系数H1(i)发送至乘法电路(MUL1)18。
在步骤S9,地址识别电路11将既定信号VSEL设定为H电平(电平1)。继而,选择器17将作为从V存储器(V2)15输出的黑斑校正系数V2(j)发送至乘法电路(MUL2)19。
例如,如果关注象素为图8A中所示上左B象素24,则乘法电路(MUL1)18采用图8C中实线所示的黑斑校正系数H1(i)(H方向的左侧对应于水平方向的较低地址,H方向的右侧对应于水平方向的较高地址)对象素的输出数据进行乘法校正。另一方面,乘法电路(MUL2)19采用图8D中实线所示的黑斑校正系数V2(j)特性(V方向的上侧对应于垂直方向的较低地址,V方向的下侧对应于垂直方向的较高地址)对象素的输出数据进行乘法校正。
在上述检验过程之后,如果关注象素二维地址的RGB基色Bayer滤色器垂直(列)方向地址为偶数(即二维图象感测元件矩阵的偶数行),并且水平(行)方向地址为偶数(即二维图象感测元件矩阵的偶数列),则流程进至步骤S10,地址识别电路11将既定信号HSEL设定为H电平(电平1)。继而,选择器16将作为从H存储器(H2)13输出的黑斑校正系数H2(i)发送至乘法电路(MUL1)18。
在步骤S11,地址识别电路11将既定信号VSEL设定为H电平(电平1)。从而,选择器17将作为从V存储器(V2)15输出的黑斑校正系数V2(j)发送至乘法电路(MUL2)19。
例如,如果关注象素为图8A中所示G象素25,则乘法电路(MUL1)18采用图8C中实线所示的黑斑校正系数H2(i)(H方向的左侧对应于水平方向的较低地址,H方向的右侧对应于水平方向的较高地址)对象素的输出数据进行乘法校正。另一方面,乘法电路(MUL2)19采用图8E中虚线所示的黑斑校正系数V2(j)(V方向的上侧对应于垂直方向的较低地址,V方向的下侧对应于垂直方向的较高地址)对象素的输出数据进行乘法校正。
以此方式,由于地址识别电路11对关注象素的二维地址进行识别,并且通过检验水平和垂直地址是奇数还是偶数来切换黑斑校正系数表。因此,可以防止图12C中所示的由可交换透镜3和红外截止滤光片4的光学组合所产生的颜色黑斑。在上述说明中,红色黑斑得以防止。然而本发明并不限于红色,而是也可以应用于其他颜色的颜色黑斑。
在此实施例中,在水平和垂直方向分别配备了两种不同的黑斑校正系数。替代地,也可以对应于R、G和B配备不同的黑斑校正系数。另外,当采用补偿滤色器时,还可以在每个方向配备不同类型的黑斑校正系数。
通过提供一个存储介质,其中记录有能够在一个系统或设备上实施上述实施例功能的软件程序的程序代码,并且通过该系统或设备的计算机(或者CPU或MPU)读取并执行存储在该存储介质中的程序代码,也可以实现本发明的目的。
在此情况下,从存储介质中读取的程序代码本身实施了上述实施例的功能,并且存储有程序代码的存储介质构成了本发明。
作为提供程序代码的存储介质,可以采用例如软盘、硬盘、光盘、磁光盘、CD-ROM、CD-R、磁带、非易失性存储卡、ROM等等。
上述实施例的功能不仅可以通过由计算机执行所读取程序代码的方式来实施,也可以通过根据程序代码的指令,由在计算机上运行的OS(操作系统)执行部分或全部的实际处理操作来实施。
另外,可以通过在将从存储介质读取的程序代码写入插在计算机中或与之相连接的功能扩展板或功能扩展单元之后,由设置在该扩展板或单元中的CPU等执行部分或全部的实际处理操作来实施上述实施例的功能。
如上所述,根据上述实施例,即使当透镜被交换时,也可以精确地校正由图象感测元件和透镜的光学特性的特定组合所导致的黑斑。
而且,可以提高黑斑校正精度。
另外,即使在透镜被交换时也可以精确地校正仅在一个特定通道中产生的颜色黑斑。
本发明并不限于上述实施例,在本发明的精神和范围内可以作出各种变化和改型。因此,为告知公众本发明的范围,给出了所附的权利要求。
Claims (9)
1.一种包括图象感测元件并且可以交换透镜的图象感测设备,包括:
提取装置,用于提取包含在透镜中的信息;
黑斑校正系数获取装置,用于基于由所述提取装置提取的信息,获取关于图象感测元件平面上两个正交方向的黑斑校正系数;以及
校正装置,用于根据所述两个正交方向的对应象素的地址从所述黑斑校正系数获取装置获取的黑斑校正系数中选择两个黑斑校正系数,并且使用所选择的两个黑斑校正系数对图象感测元件的对应象素输出的图象数据进行校正计算,
其中,包含在透镜中的信息是出射光瞳位置信息,以及所述黑斑校正系数获取装置基于所述出射光瞳位置信息计算关于图象感测元件平面上两个正交方向的黑斑校正系数。
2.根据权利要求1所述的设备,其中所述黑斑校正系数获取装置根据出射光瞳位置信息和对应象素的图象高度计算黑斑校正系数。
3.根据权利要求2所述的设备,进一步包括:
校正装置,用于根据透镜的变焦位置、聚焦位置、图象高度和孔径值的至少一个对由所述提取装置提取的出射光瞳位置信息进行校正,并且将校正的出射光瞳位置信息发送至所述黑斑校正系数获取装置。
4.根据权利要求2所述的设备,其中出射光瞳位置信息是表示透镜与图象感测元件之间在光轴上的距离的信息。
5.根据权利要求2所述的设备,其中图象高度是在图象感测元件平面上关注象素的位置与光轴上的点之间的距离。
6.根据权利要求1所述的设备,其中所述黑斑校正系数获取装置独立地计算关于受到不透射特定波长范围并插入在透镜与图象感测元件之间的滤色器影响的象素以及不受该滤色器影响的象素的黑斑校正系数。
7.根据权利要求6所述的设备,其中所述黑斑校正系数获取装置根据出射光瞳位置信息和对应象素的图象高度计算黑斑校正系数。
8.根据权利要求7所述的设备,进一步包括:
校正装置,用于根据透镜的变焦位置、聚焦位置、图象高度和孔径值的至少一个对出射光瞳位置信息进行校正,并且将校正的出射光瞳位置信息发送至所述黑斑校正系数获取装置。
9.一种应用于包括图象感测元件并且可以交换透镜的图象感测设备的黑斑校正方法,包括:
提取步骤,提取包括在透镜中的信息;
黑斑校正系数获取步骤,基于在所述提取步骤提取的信息,获取关于图象感测元件平面上两个正交方向的黑斑校正系数;以及
校正步骤,根据所述两个正交方向的对应象素的地址从所述黑斑校正系数获取步骤获取的黑斑校正系数中选择两个黑斑校正系数,并且使用所选择的两个黑斑校正系数对图象感测元件的对应象素输出的图象数据进行校正计算,
其中,包含在透镜中的信息是出射光瞳位置信息,以及所述黑斑校正系数获取装置基于所述出射光瞳位置信息计算关于图象感测元件平面上两个正交方向的黑斑校正系数。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001009474A JP4574022B2 (ja) | 2001-01-17 | 2001-01-17 | 撮像装置及びシェーディング補正方法 |
| JP009474/2001 | 2001-01-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1366423A CN1366423A (zh) | 2002-08-28 |
| CN1226864C true CN1226864C (zh) | 2005-11-09 |
Family
ID=18876955
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB021020280A Expired - Fee Related CN1226864C (zh) | 2001-01-17 | 2002-01-17 | 图象感测设备及黑斑校正方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US6937777B2 (zh) |
| EP (1) | EP1227669B1 (zh) |
| JP (1) | JP4574022B2 (zh) |
| CN (1) | CN1226864C (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104205818A (zh) * | 2011-12-28 | 2014-12-10 | 富士胶片株式会社 | 拍摄装置及其画质校正方法以及可换镜头和拍摄装置主体 |
Families Citing this family (57)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4034614B2 (ja) * | 2002-08-06 | 2008-01-16 | 富士フイルム株式会社 | 固体撮像装置 |
| US7391450B2 (en) | 2002-08-16 | 2008-06-24 | Zoran Corporation | Techniques for modifying image field data |
| US7388610B2 (en) * | 2002-08-16 | 2008-06-17 | Zoran Corporation | Techniques of modifying image field data by extrapolation |
| US7408576B2 (en) * | 2002-08-16 | 2008-08-05 | Zoran Corporation | Techniques for modifying image field data as a function of radius across the image field |
| JP4115220B2 (ja) * | 2002-09-19 | 2008-07-09 | キヤノン株式会社 | 撮像装置 |
| JP3981034B2 (ja) | 2003-03-25 | 2007-09-26 | 富士フイルム株式会社 | カラー画像取得装置およびカラー電子カメラ |
| JP4377622B2 (ja) * | 2003-07-16 | 2009-12-02 | オリンパス株式会社 | シェーディング補正装置 |
| JP3824237B2 (ja) * | 2003-09-05 | 2006-09-20 | ソニー株式会社 | 画像処理装置および方法、記録媒体、並びにプログラム |
| JP4704913B2 (ja) * | 2003-10-31 | 2011-06-22 | 三菱電機株式会社 | 画像補正方法および撮像装置 |
| JP4283704B2 (ja) * | 2004-02-25 | 2009-06-24 | 富士フイルム株式会社 | 撮影装置 |
| JP2005341033A (ja) * | 2004-05-25 | 2005-12-08 | Konica Minolta Photo Imaging Inc | 撮像装置及びプログラム |
| JP4703206B2 (ja) * | 2004-05-31 | 2011-06-15 | 東芝モバイルディスプレイ株式会社 | 画像取込機能付き表示装置 |
| KR100615277B1 (ko) * | 2004-08-18 | 2006-08-25 | 엠텍비젼 주식회사 | 이미지 센서에서의 렌즈 셰이딩 현상 보정 방법 및 장치 |
| JP2006121612A (ja) * | 2004-10-25 | 2006-05-11 | Konica Minolta Photo Imaging Inc | 撮像装置 |
| KR20060055940A (ko) * | 2004-11-19 | 2006-05-24 | 삼성전자주식회사 | 메모리를 포함하는 ccd 및 이를 포함하는 화상입력장치 및 화상입력방법 |
| JP4229053B2 (ja) * | 2004-12-06 | 2009-02-25 | ソニー株式会社 | 撮像装置、撮像方法及び撮像処理のためのプログラム |
| KR100645634B1 (ko) | 2004-12-16 | 2006-11-15 | 삼성전기주식회사 | 렌즈 쉐이딩 자동 보정방법 및 장치 |
| JP4018705B2 (ja) * | 2005-04-18 | 2007-12-05 | キヤノン株式会社 | シェーディング補正装置及び補正方法並びに撮像装置 |
| JP2007094742A (ja) * | 2005-09-28 | 2007-04-12 | Olympus Corp | 画像信号処理装置及び画像信号処理プログラム |
| JP4946059B2 (ja) * | 2006-01-11 | 2012-06-06 | 株式会社ニコン | 撮像装置 |
| DE102006003596A1 (de) * | 2006-01-25 | 2007-07-26 | Sick Ag | Verfahren und Vorrichtung zur Korrektur der Helligkeit eines durch eine Sensormatrix erzeugten Rohbilds |
| JP5040662B2 (ja) * | 2006-02-03 | 2012-10-03 | 株式会社ニコン | 画像処理装置、画像処理方法、および画像処理プログラム |
| JP4476955B2 (ja) * | 2006-03-17 | 2010-06-09 | 富士通マイクロエレクトロニクス株式会社 | シェーディング補正回路とその制御方法 |
| GB2442050A (en) * | 2006-08-29 | 2008-03-26 | Micron Technology Inc | Image pixel value correction |
| US7782380B2 (en) * | 2006-09-01 | 2010-08-24 | Aptina Imaging Corporation | Positional gain adjustment and surface generation for image processing |
| JP4871153B2 (ja) * | 2007-01-29 | 2012-02-08 | パナソニック株式会社 | ヘッド分離型カメラおよびカメラヘッド |
| US20080278613A1 (en) * | 2007-05-11 | 2008-11-13 | Micron Technology, Inc. | Methods, apparatuses and systems providing pixel value adjustment for images produced with varying focal length lenses |
| US8078001B2 (en) * | 2007-05-11 | 2011-12-13 | Micron Technology, Inc. | Methods, apparatuses and systems for piecewise generation of pixel correction values for image processing |
| JP4998092B2 (ja) * | 2007-05-31 | 2012-08-15 | 富士通セミコンダクター株式会社 | 固体撮像回路およびカメラシステム |
| US8463068B2 (en) * | 2007-08-09 | 2013-06-11 | Micron Technology, Inc. | Methods, systems and apparatuses for pixel value correction using multiple vertical and/or horizontal correction curves |
| JP2009049609A (ja) | 2007-08-16 | 2009-03-05 | Fujitsu Microelectronics Ltd | 補正回路、補正方法及び撮像装置 |
| US8331722B2 (en) * | 2008-01-08 | 2012-12-11 | Aptina Imaging Corporation | Methods, apparatuses and systems providing pixel value adjustment for images produced by a camera having multiple optical states |
| GB0801443D0 (en) * | 2008-01-25 | 2008-03-05 | Micron Technology Inc | Methods, systems and apparatuses for pixel signal correction using elliptical hyperbolic cosines |
| JP5163319B2 (ja) * | 2008-06-30 | 2013-03-13 | ソニー株式会社 | 画像信号補正装置、撮像装置、画像信号補正方法、およびプログラム |
| JP2010103642A (ja) * | 2008-10-21 | 2010-05-06 | Toshiba Corp | シェーディング補正装置 |
| JP5376993B2 (ja) * | 2009-02-19 | 2013-12-25 | キヤノン株式会社 | 情報処理装置、撮像装置、および情報処理装置の制御方法 |
| JP4402161B1 (ja) * | 2009-03-30 | 2010-01-20 | マスレ ホールディングス エルエルピー | 撮像装置、画像再生装置、及び撮像方法 |
| JP5475393B2 (ja) | 2009-10-20 | 2014-04-16 | キヤノン株式会社 | 撮像システムおよび補正方法 |
| US8218041B2 (en) * | 2010-02-01 | 2012-07-10 | Digital Imaging Systems Gmbh | Aperture shading correction |
| JP2011223562A (ja) * | 2010-03-23 | 2011-11-04 | Fujifilm Corp | 撮像装置 |
| US8520059B2 (en) * | 2010-03-24 | 2013-08-27 | Fujifilm Corporation | Stereoscopic image taking apparatus |
| JP2012018277A (ja) | 2010-07-07 | 2012-01-26 | Olympus Imaging Corp | 光路反射型のズームレンズを備えた撮像装置 |
| JP5385462B2 (ja) | 2010-09-13 | 2014-01-08 | 富士フイルム株式会社 | 単眼立体撮像装置、単眼立体撮像装置用シェーディング補正方法及び単眼立体撮像装置用プログラム |
| JP2012222465A (ja) * | 2011-04-05 | 2012-11-12 | Sony Corp | 画像処理装置及び画像処理方法、並びにコンピューター・プログラム |
| JP5914192B2 (ja) * | 2012-06-11 | 2016-05-11 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP5620522B2 (ja) * | 2013-01-07 | 2014-11-05 | オリンパスイメージング株式会社 | 撮像装置及び撮像方法 |
| EP2833621B1 (en) * | 2013-08-01 | 2018-10-10 | Harvest Imaging bvba | Image sensor with shading detection |
| US9503698B2 (en) | 2013-08-01 | 2016-11-22 | Harvest Imaging bvba | Image sensor with shading detection |
| JP6033454B2 (ja) * | 2013-09-27 | 2016-11-30 | 富士フイルム株式会社 | 画像処理装置、撮像装置、画像処理方法及び画像処理プログラム |
| JP6614057B2 (ja) * | 2016-07-21 | 2019-12-04 | リコーイメージング株式会社 | 焦点検出装置、焦点検出方法及び撮影装置 |
| JP6935771B2 (ja) * | 2018-02-23 | 2021-09-15 | オムロン株式会社 | 画像センサ |
| JP6819630B2 (ja) | 2018-02-23 | 2021-01-27 | オムロン株式会社 | 画像センサ及び本体モジュール |
| JP6819629B2 (ja) * | 2018-02-23 | 2021-01-27 | オムロン株式会社 | 画像センサ |
| US10667693B1 (en) * | 2018-11-16 | 2020-06-02 | Perkinelmer Health Sciences, Inc. | Systems, methods, and apparatus for interference filter correction based on angle of incidence |
| JP7267723B2 (ja) | 2018-12-14 | 2023-05-02 | キヤノン株式会社 | レンズ装置、撮像装置、処理装置、およびカメラ装置 |
| JP2021051038A (ja) * | 2019-09-26 | 2021-04-01 | キヤノン株式会社 | 収差推定方法、収差推定装置、プログラムおよび記録媒体 |
| CN111311724B (zh) * | 2020-01-20 | 2022-08-09 | 稿定(厦门)科技有限公司 | 3d文字的阴影添加方法、介质、设备及装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5850575A (en) * | 1935-09-14 | 1998-12-15 | Nikon Corporation | Image vibration reduction device |
| JPH02123879A (ja) * | 1988-11-01 | 1990-05-11 | Canon Inc | 交換レンズユニット及び撮像装置 |
| JPH0323415A (ja) * | 1989-06-20 | 1991-01-31 | Canon Inc | 光学的ローパスフィルター |
| JP2893983B2 (ja) * | 1991-03-28 | 1999-05-24 | ソニー株式会社 | 撮像装置 |
| JP3336436B2 (ja) * | 1991-04-02 | 2002-10-21 | 株式会社ニコン | リソグラフィシステム、情報収集装置、露光装置、及び半導体デバイス製造方法 |
| US5990941A (en) * | 1991-05-13 | 1999-11-23 | Interactive Pictures Corporation | Method and apparatus for the interactive display of any portion of a spherical image |
| JPH0530415A (ja) * | 1991-07-24 | 1993-02-05 | Matsushita Electric Ind Co Ltd | ホワイトシエーデイング補正処理装置 |
| US5420630A (en) * | 1992-09-11 | 1995-05-30 | Canon Kabushiki Kaisha | Image pickup apparatus performing white balance control based on data from regions of a frame |
| JPH06178198A (ja) * | 1992-12-04 | 1994-06-24 | Nec Corp | 固体撮像装置 |
| JPH06197266A (ja) * | 1992-12-24 | 1994-07-15 | Sony Corp | レンズ及び撮像装置 |
| WO1994020875A2 (en) * | 1993-03-03 | 1994-09-15 | Street Graham S B | Method and apparatus for image alignment |
| US5365058A (en) * | 1993-06-16 | 1994-11-15 | Welch Allyn, Inc. | Compensating optical system for video monitor |
| DE69434685T2 (de) * | 1993-08-04 | 2006-09-14 | Canon K.K. | Bildverarbeitungsverfahren und -gerät |
| KR100203239B1 (ko) | 1995-02-16 | 1999-06-15 | 윤종용 | 화이트쉐이딩 보정방법 및 장치 |
| JPH09211651A (ja) * | 1996-01-31 | 1997-08-15 | Minolta Co Ltd | レンズ交換可能なカメラ |
| JPH09307789A (ja) * | 1996-05-17 | 1997-11-28 | Olympus Optical Co Ltd | 画像処理装置 |
| JPH09318993A (ja) * | 1996-05-30 | 1997-12-12 | Canon Inc | 固体撮像素子カメラシステム、撮影用交換レンズおよび光学付属品 |
| US6088537A (en) * | 1997-04-15 | 2000-07-11 | Canon Kabushiki Kaisha | Focus detecting device |
| JPH11122525A (ja) * | 1997-08-06 | 1999-04-30 | Minolta Co Ltd | デジタルカメラ |
| JPH11164194A (ja) * | 1997-11-28 | 1999-06-18 | Konica Corp | 画像処理方法及び画像入力装置 |
| JP2000196953A (ja) * | 1998-12-25 | 2000-07-14 | Olympus Optical Co Ltd | カメラシステム |
| JP3733771B2 (ja) * | 1999-02-16 | 2006-01-11 | コニカミノルタホールディングス株式会社 | 撮像装置およびシェーディング補正方法 |
| JP3710947B2 (ja) * | 1999-02-22 | 2005-10-26 | 株式会社小糸製作所 | 車輌灯具用レンズの製造方法及び車輌灯具用レンズの製造装置 |
| JP4265029B2 (ja) * | 1999-05-11 | 2009-05-20 | 株式会社ニコン | 画像取り込み装置および交換レンズ |
| JP3854754B2 (ja) * | 1999-06-30 | 2006-12-06 | キヤノン株式会社 | 撮像装置、画像処理装置及びその方法、並びにメモリ媒体 |
| DE10124474A1 (de) * | 2001-05-19 | 2002-11-21 | Zeiss Carl | Mikrolithographisches Belichtungsverfahren sowie Projektionsobjektiv zur Durchführung des Verfahrens |
-
2001
- 2001-01-17 JP JP2001009474A patent/JP4574022B2/ja not_active Expired - Fee Related
-
2002
- 2002-01-10 EP EP02250153A patent/EP1227669B1/en not_active Expired - Lifetime
- 2002-01-15 US US10/053,189 patent/US6937777B2/en not_active Expired - Fee Related
- 2002-01-17 CN CNB021020280A patent/CN1226864C/zh not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104205818A (zh) * | 2011-12-28 | 2014-12-10 | 富士胶片株式会社 | 拍摄装置及其画质校正方法以及可换镜头和拍摄装置主体 |
| CN104205818B (zh) * | 2011-12-28 | 2016-02-24 | 富士胶片株式会社 | 拍摄装置及其画质校正方法以及可换镜头和拍摄装置主体 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4574022B2 (ja) | 2010-11-04 |
| US6937777B2 (en) | 2005-08-30 |
| JP2002218298A (ja) | 2002-08-02 |
| EP1227669A3 (en) | 2008-06-04 |
| EP1227669A2 (en) | 2002-07-31 |
| EP1227669B1 (en) | 2011-12-07 |
| US20020094131A1 (en) | 2002-07-18 |
| CN1366423A (zh) | 2002-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1226864C (zh) | 图象感测设备及黑斑校正方法 | |
| US11856291B2 (en) | Thin multi-aperture imaging system with auto-focus and methods for using same | |
| JP5254762B2 (ja) | 撮像装置、撮像システム、及び撮像装置における信号の補正方法 | |
| CN1922510A (zh) | 光学设备和光束分离器 | |
| CN1898697A (zh) | 用于修改图像场数据的技术 | |
| US20130016274A1 (en) | Image pickup apparatus and image pickup device | |
| CN1914580A (zh) | 通过外推来对图像场数据进行建模的技术 | |
| US8723991B2 (en) | Color imaging element, imaging device, and storage medium storing an imaging program | |
| JP2009031682A (ja) | 撮像システム及び画像信号処理プログラム | |
| US11659294B2 (en) | Image sensor, imaging apparatus, electronic device, image processing system, and signal processing method | |
| JPWO2017119477A1 (ja) | 撮像素子および撮像装置 | |
| CN1260951C (zh) | 照相机 | |
| CN1275725A (zh) | 焦点检测装置 | |
| WO2020213595A1 (ja) | 交換レンズ、情報処理装置、情報処理方法、及び、プログラム | |
| JP2012156882A (ja) | 固体撮像装置 | |
| JP2021127998A (ja) | 距離情報取得装置および距離情報取得方法 | |
| US10334161B2 (en) | Image processing apparatus, image processing method, computer program and imaging apparatus | |
| JP2019117333A (ja) | 撮像装置およびその制御方法 | |
| JP2008158362A (ja) | 焦点検出装置及び撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20051109 Termination date: 20160117 |
|
| EXPY | Termination of patent right or utility model |