JP3733771B2 - 撮像装置およびシェーディング補正方法 - Google Patents
撮像装置およびシェーディング補正方法 Download PDFInfo
- Publication number
- JP3733771B2 JP3733771B2 JP03761099A JP3761099A JP3733771B2 JP 3733771 B2 JP3733771 B2 JP 3733771B2 JP 03761099 A JP03761099 A JP 03761099A JP 3761099 A JP3761099 A JP 3761099A JP 3733771 B2 JP3733771 B2 JP 3733771B2
- Authority
- JP
- Japan
- Prior art keywords
- correction
- light receiving
- incident
- light beam
- optical system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images





























Landscapes
- Transforming Light Signals Into Electric Signals (AREA)
- Facsimile Heads (AREA)
- Facsimile Scanning Arrangements (AREA)
- Facsimile Image Signal Circuits (AREA)
- Studio Devices (AREA)
- Image Input (AREA)
- Picture Signal Circuits (AREA)
Description
【発明の属する技術分野】
この発明は、例えば、デジタルカメラ、ビデオカメラ等のようにマイクロレンズが形成されて配列配置される複数の受光素子を有する撮像装置およびこのような撮像装置におけるシェーディング補正方法に関する。
【0002】
【従来の技術】
従来より、電気的信号にて画像を取得するために複数の受光素子を配列配置したデバイスであるCCD(Charge Coupled Device)が利用されている。さらに近年、CCDの高解像度化を実現するために個々の受光素子の大きさを縮小し、1つのCCDに多数の受光素子を配列する技術が研究されている。
【0003】
ここで、受光素子の縮小化はCCDの感度の低下および出力電圧の低下をもたらす。そこで、各受光素子に微小なレンズ(以下、「マイクロレンズ」という。)を積層し、受光部位に光を集光させることによりCCDの感度の低下および出力電圧の低下を防止する技術が開発されている。
【0004】
【発明が解決しようとする課題】
マイクロレンズが形成されたCCDを用いて撮影を行う場合、マイクロレンズの影響を受けて光の入射方向により受光素子からの出力が大きく変化する。一般的には、CCDの周縁部の受光素子では光が傾斜して入射し、CCDの中央部の受光素子に比べて周縁部の受光素子からの出力が低下する。その結果、得られる画像の周縁部の輝度が低下するといういわゆるシェーディングが発生する。そこで、このようなシェーディングをなくす技術の開発が求められている。
【0005】
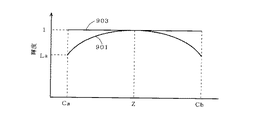
図31ないし図33はこのようなマイクロレンズの影響によるシェーディングの発生の様子を説明するための図である。ただし、光学系のレンズによる周辺光量落ちおよび受光素子の光電変換特性のばらつきはないものとする。図31はCCD900上の光軸中心Zに対する左右方向の端点Ca,Cbおよび上下方向の端点Cc,Cdの位置を示す図である。
【0006】
図32中の符号901にて示すグラフは、CCD900を用いて均一照明された均一濃度の被写体を撮影した場合の端点Ca,中心Z,端点Cbに沿う直線上に並ぶ受光素子からの出力に応じた画像中の輝度分布を示しており、中心Zに対して両端点Ca,Cbにおける輝度が低下する様子を示す。図33中の符号902にて示すグラフは同様の条件で撮影を行った場合の端点Cc,中心Z,端点Cdに沿う直線上に並ぶ受光素子からの出力に応じた画像中の輝度分布を示し、中心Zに対して両端点Cc,Cdにおける輝度が低下する様子を示す。
【0007】
このように、マイクロレンズを有するCCD900にて撮影を行う場合、画像の周縁部での輝度の低下、すなわちシェーディングが顕著に発生する。
【0008】
マイクロレンズによるシェーディングの影響を取り除くには各受光素子からの出力の低下量を補正することにより取り除くことができる。例えば、図32における中心Zでの輝度を1とした場合に、端点Caでの輝度がLaであったとすると、端点Caに位置する受光素子の出力を1/La倍することにより端点Caにおける輝度を適正に補正することができる。また、図33においても端点Ccにおける輝度がLcであるとすると、端点Ccに位置する受光素子の出力を1/Lc倍することにより端点Ccにおける輝度を適正に補正することができる。同様の補正を図32および図33に示すグラフ901,902に基づいて各受光素子に行うことにより両端点Ca,Cb間および両端点Cc,Cd間に並ぶ受光素子からの出力が適正に補正され、図32および図33中に符号903,904にて示すグラフのように均一な輝度特性を得ることができる。
【0009】
したがって、均一照明された均一濃度の被写体を撮影した際に各受光素子からの出力が均一となるような補正を他の被写体の撮影時に行うことにより、他の被写体の画像のシェーディングを補正することができる。
【0010】
ところで、マイクロレンズによるシェーディングの発生はマイクロレンズの形状誤差および位置ずれ、並びに撮影光学系の状態の影響を受ける。すなわち、受光素子に入射する光束の光束中心の方向(3次元ベクトルにて表現可能な方向)に応じて受光素子からの出力は複雑に変化するとともに光学系の絞りの状態によっても複雑に変化する。その結果、ある光学系の状態で均一照明された均一濃度の被写体を撮影して得られるシェーディング補正のための情報は、光学系が同様の状態であるときの撮影画像の補正にしか用いることができない。
【0011】
この発明は上記課題に鑑みなされたものであり、光学系の状態の影響を受けて複雑に変化するシェーディングに対して適切に補正を行うことができる撮像装置およびシェーディング補正方法を提供することを目的としている。
【0012】
なお、マイクロレンズの影響によるシェーディングの度合いは撮影レンズの瞳位置や絞りの状態によって変化する。瞳位置は撮影レンズの焦点距離および繰り出し量により変化し、さらに、撮影レンズの種類によっても異なる。したがって、ズームレンズを使用する場合や一眼レフ方式のように複数のレンズユニットが使用できるカメラにおいては瞳位置と絞りの組合せは膨大な量となり、光学系の全ての状態に対応した補正のための膨大な情報を予め記憶しておくことは現実には不可能である。
【0013】
そこで、この発明は光学系の状態の影響を受けて複雑に変化するシェーディングを限定された基本情報に基づいて適切に補正することができる撮像装置を提供することも目的としている。
【0014】
【課題を解決するための手段】
請求項1の発明の撮像装置は、被写体からの光を所定の受光面へと導く光学系と、それぞれにマイクロレンズが形成された複数の受光素子を前記受光面に配列配置し、当該複数の受光素子からの出力に基づいて前記被写体の画像を取得する撮像手段と、受光素子に入射する光束の入射方向と当該受光素子からの出力に対するシェーディング補正の補正係数との関係である補正情報を予め記憶する補正情報記憶手段と、前記受光面に複数の基準位置が設定されており、前記光学系の状態を示す情報に基づいて基準位置に入射する光束の入射方向を取得する入射方向取得手段と、基準位置への光束の入射方向および前記補正情報に基づいて当該基準位置に関連する受光素子からの出力に対するシェーディング補正を行う補正手段とを備え、前記補正情報が、前記光学系の所定のレンズ配置において、前記受光面上の位置と当該位置へと入射する光束の入射方向との関係を示す補正用入射角情報と、前記所定のレンズ配置において前記受光面上の位置に関連づけられた補正係数の集合である補正テーブルとを有し、前記補正手段が、前記入射角方向取得手段により取得された基準位置に入射する光束の入射方向が、所定レンズ配置において受光面上の光軸中心から当該基準位置へと向かう直線上の如何なる位置に入射する光束の入射方向に相当するのかを、前記補正用入射角情報を参照して求める手段と、求められた位置の補正係数を前記補正テーブルを参照して求めることで、前記基準位置の補正係数を求める基準位置補正係数特定手段とを有する。
【0016】
請求項2の発明は、請求項1に記載の撮像装置であって、前記補正手段が、基準位置に対応する前記補正テーブル上の位置に近接する複数の補正係数を内挿することにより、当該基準位置における補正係数を求める手段を有する。
【0017】
請求項3の発明は、請求項1または請求項2に記載の撮像装置であって、光束が前記光学系の光軸に漸次近づく場合と漸次離れる場合の2つの補正情報が準備されており、前記入射方向取得手段により取得される入射方向に基づいて前記2つの補正情報のうちの1つが選択される。
【0018】
請求項4の発明は、請求項1ないし3のいずれかに記載の撮像装置であって、前記光学系のレンズ配置および絞りに関する複数の状態における前記受光面上の光軸中心からの距離と入射光束の前記光軸に対する傾きとの関係を示す複数の基本テーブルを記憶する手段をさらに備え、前記入射方向取得手段が、前記複数の基本テーブルを内挿することにより、前記光学系の撮影時の状態における基準位置に入射する光束の入射方向を取得する。
【0019】
請求項5の発明は、請求項1ないし4のいずれかに記載の撮像装置であって、前記光学系の全部または一部が交換可能な交換ユニットとされ、前記補正手段による補正に利用される値であって交換ユニットの種類に固有のものを当該種類に対応付けて記憶するユニット変数記憶手段をさらに備える。
【0020】
請求項6の発明は、請求項1ないし4のいずれかに記載の撮像装置であって、前記光学系の全部または一部が交換可能な交換ユニットとされ、前記交換ユニットが、前記補正手段による補正に利用される値であって前記交換ユニットの種類に固有のものを記憶する手段を有する。
【0021】
請求項7の発明は、請求項1ないし6のいずれかに記載の撮像装置であって、前記補正手段が、前記複数の基準位置の補正係数をノイズ成分を与えつつ補間することにより前記複数の受光素子に対応する補正係数を求める手段を有する。
【0022】
請求項8の発明は、所定の受光面に配列配置されるとともにそれぞれにマイクロレンズが形成された複数の受光素子を有し、被写体からの光を光学系を介して当該複数の受光素子へと導くことにより当該被写体の画像を取得する撮像装置において、取得される画像のシェーディングを補正するシェーディング補正方法であって、受光素子に入射する光束の入射方向と当該受光素子からの出力に対するシェーディング補正の補正係数との関係である補正情報を準備する工程と、前記受光面に複数の基準位置が設定されており、前記光学系の状態を示す情報に基づいて基準位置に入射する光束の入射方向を取得する入射方向取得工程と、基準位置への光束の入射方向および前記補正情報に基づいて当該基準位置に関連する受光素子からの出力シェーディング補正を行う補正工程とを有し、前記補正情報が、前記光学系の所定のレンズ配置において、前記受光面上の位置と当該位置へと入射する光束の入射方向との関係を示す補正用入射角情報と、前記所定のレンズ配置において前記受光面上の位置に関連づけられた補正係数の集合である補正テーブルとを有し、前記補正工程が、前記入射角方向取得工程により取得された基準位置に入射する光束の入射方向が、所定レンズ配置において受光面上の光軸中心から当該基準位置へと向かう直線上の如何なる位置に入射する光束の入射方向に相当するのかを、前記補正用入射角情報を参照して求める工程と、求められた位置の補正係数を前記補正テーブルを参照して求めることで、前記基準位置の補正係数を求める工程とを有する。
【0023】
【発明の実施の形態】
<1. 発明の原理>
マイクロレンズを有するCCDにて撮影を行う場合、CCDの各受光素子からの出力はマイクロレンズの影響を受けて複雑に変化する。また、マイクロレンズの形状はCCDの個体ごとに誤差を有しており、マイクロレンズの影響によるシェーディングの発生を一層複雑なものとしている。なお、一般的には1つのCCD内の各マイクロレンズの形状はある程度均一となるように形成される。
【0024】
ここで、マイクロレンズの影響によるシェーディングとは、光をCCDへと導く光学系の状態の影響を受けるシェーディングをいい、光学系の状態の影響を受けないシェーディング(例えば、光電変換特性のばらつきに起因する感度ムラ)を除いたものをいう。以下の説明では、「マイクロレンズの影響によるシェーディング」のことを適宜、単に、「シェーディング」という。
【0025】
図1(a)ないし(d)は1つの受光素子10の構造を示す図であり、図1(a)は平面図であり、図1(b)ないし(d)は縦断面図である。図1(a)および(b)に示すように、1つの受光素子10は基台11上に受光部12を有しており、この受光部12での受光感度を増すために受光部12を覆うマイクロレンズ13が形成される。
【0026】
1つの受光素子10において、撮影光学系(以下、単に「光学系」という。)のレンズ配置の変化により図1(b)ないし(d)にて示すように入射する光束の光束中心Lの方向(以下、「光束の入射方向」という。)が様々に変化する。これにより、入射する光束が受光部12に対して様々な位置に集光される。このとき、基台11上の集光範囲は光束の入射方向によっては受光部12の上面に全て含まれるとは限らないことから、光束の入射方向により受光素子10からの出力は複雑に変化する。
【0027】
図2(a)ないし(c)はCCDの個体ごとに様々な形状に形成されたマイクロレンズ13の例を示す図である。ここで、図2(a)または(b)に示すように、図1(b)に示す受光素子10に比べてマイクロレンズ13の高さが低かったり高かったりする場合には、入射する光束の集光範囲の大きさが変化する。その結果、光束の入射方向と受光素子10からの出力との関係は図1(b)に示すものと異なったものとなる。すなわち、受光素子10からの出力の補正をCCDの個体ごとに行う必要がある。
【0028】
さらに、CCDの製造の際の誤差により、マイクロレンズ13が図2(c)に示すように受光部12とずれて形成された場合には、入射光束の集光範囲と受光部12の上面との重なりの度合いは光束の入射方向(3次元ベクトルとして表現可能な入射方向)に大きく依存する。したがって、単に、受光素子10が配列される面(以下、「受光面」という。)の法線と光束の入射方向とがなす角(すなわち、入射光束の傾き)と受光素子10からの出力に対する補正係数との関係を準備したのでは、受光素子10からの出力を適切に補正することができない。なお、補正係数とは、出力を適正な値に補正する際に利用する値をいい、例えば、出力と掛け合わせることにより適正な出力となる係数をいう。
【0029】
この発明では、マイクロレンズを有する受光素子配列を用いた撮影の際に生じるシェーディングに対して、光束の入射方向と受光素子の出力に対する補正係数との関係を準備しておくことで適切な補正を実現している。
【0030】
図3はこの発明に係るシェーディング補正方法の基本的流れを示す流れ図である。図3に示すように、この発明では、光束の入射方向と受光素子の出力に対する補正係数との関係が予め準備される(ステップS11)。なお、マイクロレンズ13を有する受光素子10の場合、光学系の絞りを変化させると受光部12の上面と集光範囲との重なりの程度が複雑に変化するが、画像の撮影の際の絞りの状態に対応した補正情報がステップS11にて準備されるものとする。
【0031】
補正情報が準備されると、出力の補正対象となる受光素子10への光束の入射方向が求められる(ステップS12)。3次元ベクトルとして表現可能な入射方向は、例えば、光学系のレンズの配置状態および受光素子10のCCD上の位置から計算により求めることが可能である。なお、ステップS12における入射方向を求める処理は、入射方向と同等な情報を求める処理であってもよい。
【0032】
補正情報は光束の入射方向と補正係数との関係を示すものであることから、ステップS12にて求められた入射方向から受光素子10の出力を補正するための補正係数が求められる(ステップS13)。その後、この補正係数に基づいて受光素子10からの出力を補正することにより、適正な出力が得られる(ステップS14)。
【0033】
以上に説明した補正をCCD上の全ての受光素子10に対して実質的に行うことにより、CCDから得られる画像に現れるマイクロレンズの影響によるシェーディングに対して適切な補正が行われる。
【0034】
<2. 第1の実施の形態>
<2.1 デジタルカメラの全体構成>
図4はこの発明の第1の実施の形態に係る撮像装置であるデジタルカメラ100の外観を示す斜視図である。デジタルカメラ100はカメラ本体を構成する本体部101に交換可能なレンズユニット102を取り付けた構成となっている。
【0035】
本体部101内部にはレンズユニット102により被写体の像が形成されるCCD111が設けられており、デジタルカメラ100の操作者がファインダ用窓112から所望の被写体を覗きながらシャッタボタン113を押すと被写体のデジタル画像がメモリスロット114内のメモリカードに記憶される。画像を記憶したメモリカードは操作者が取出ボタン115を押すことにより本体部101から取り出すことができる。
【0036】
図5はデジタルカメラ100の機械的構成を示すブロック図である。レンズユニット102内には被写体からの光LaをCCD111へと導き、CCD111上に被写体の像を形成するための撮影用の光学系121が格納されており、光学系121内の複数のレンズ配置や絞りの状態がドライバ122により制御される。
【0037】
CCD111、シャッタボタン113、メモリスロット114およびドライバ122は適宜インターフェイスを介する等してバスライン130に接続される。バスライン130にはさらに各種演算処理を行うCPU131、基本的プログラムを記憶するROM132、補正に必要な情報を記憶するRAM133、CCD111からの画像信号をデジタル画像信号に変換するA/D変換回路134、および、画像のシェーディングを補正するための補正回路135が適宜インターフェイスを介する等して接続される。なお、補正回路135の機能の全部または一部がCPU131、ROM132およびRAM133の動作により実現されてもよく、CPU131、ROM132およびRAM133により実現される機能の全部または一部がハードウェア的に構築されていてもよい。
【0038】
操作者がシャッタボタン113を押すとCCD111からの信号がA/D変換回路134を介してデジタル画像として取り込まれる。そして、この画像はドライバ122からの情報やRAM133内の情報に基づいてCPU131や補正回路135によりシェーディング補正され、メモリスロット114を介してメモリカード114aに記憶される。
【0039】
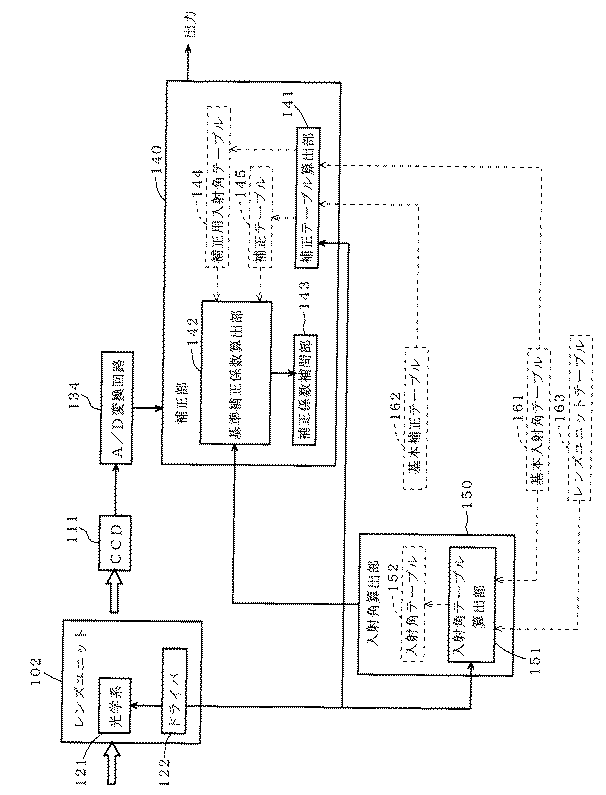
図6は図5に示すCPU131、ROM132、RAM133および補正回路135により行われるシェーディング補正動を機能ごとに分けて示すブロック図である。また、図6には図5に示したレンズユニット102、CCD111およびA/D変換回路134も同様に示す。
【0040】
図6に示すように、デジタルカメラ100におけるシェーディング補正に係る機能構成は大きく補正部140と入射角算出部150とに分けられる。
【0041】
補正部140は画像のシェーディング補正等を行うものであり、補正に必要な補正情報の生成も行う。すなわち、図3に示す流れ図のステップS11,S13およびS14の処理に相当する処理を行う。入射角算出部150は補正の対象となる受光素子に入射する光束の入射方向を求めるものであり、図3に示す流れ図のステップS12に相当する処理を行う。
【0042】
さらに、補正部140は補正テーブル算出部141、基準補正係数算出部142および補正係数補間部143を有する。補正テーブル算出部141は実質的に補正情報としての役割を果たす補正用入射角テーブル144および補正テーブル145を生成し、ステップS11に相当する処理を行う。なお、これらのテーブルの内容については後述する。基準補正係数算出部142は基準となる所定の受光素子に入射する光束の入射方向を入射角算出部150から受け取り、補正用入射角テーブル144および補正テーブル145を参照して基準補正係数を求め、ステップS13に相当する処理を行う。また、補正係数補間部143は求められた基準補正係数を補間することにより全ての受光素子に対応する補正係数を算出する。
【0043】
入射角算出部150はドライバ122からの情報を受けて後述する入射角テーブル152を生成する入射角テーブル算出部151を有する。そして、入射角算出部150はこの入射角テーブル152を参照して補正の対象となる受光素子への光束の入射方向に相当する情報を求め、ステップS12に相当する処理を行う。
【0044】
以上、デジタルカメラ100の機械的構成および機能的構成について説明してきたが、次に、デジタルカメラ100におけるシェーディング補正の具体的動作について詳説する。
【0045】
<2.2 シェーディング補正の動作>
図7はデジタルカメラ100におけるシェーディング補正動作の概略を示す流れ図である。デジタルカメラ100では、CCD111の受光面を所定の矩形のブロックに予め区分けしておき、各ブロックの中心(以下、「基準位置」という。)に位置する受光素子に対応する補正係数を基準補正係数として求める。その後、基準補正係数を補間することにより、全ての受光素子に対応する補正係数を求める。以下、図7を参照しながらシェーディング補正動作について説明する。
【0046】
<2.2.1 補正情報の生成>
シェーディング補正の準備として、まず、図6に示す補正テーブル算出部141が補正用入射角テーブル144および補正テーブル145を生成し、図5に示す記憶手段であるRAM133に記憶する(ステップS21)。
【0047】
補正用入射角テーブル144とは、光学系121のレンズ配置や絞りの状態が所定の状態であるときに、図8に示すようにCCD111の受光面と光学系121の光軸121aとの交点(以下、「光軸中心」という。)121bから補正の対象となる受光素子111aまでの距離Rcと、入射光束の光束中心Lcと光軸121aとのなす角θ(光軸121aに対する光束の傾きを表すいわゆる「軸外光の主光線角度」であり、θ>0のときに光束中心Lcが光軸121aから漸次離れるものとする。)との関係を示すテーブルである。また、補正テーブル145とは、光学系121が同様の所定の状態であるときの受光素子111aの2次元座標にて表される位置と補正係数との関係を示すテーブルである。
【0048】
なお、以下の説明における距離RcはCCD111上の実際の距離を表しており、また、補正テーブル145中に2次元配列される補正係数の各格納位置にはCCD111上の受光素子配列に基づく座標が対応付けられる。したがって、補正用入射角テーブル144と補正テーブル145とを対応付ける際には実際の距離と座標との間の変換処理が行われる。
【0049】
ここで、光束中心Lcは光学系121の光軸121aを含む1つの面に沿う方向を向くことから、距離Rcと角θとの関係を示す情報は受光素子111aが配列される受光面上の位置とこの位置へ入射する光束の入射方向(3次元ベクトルとして表現可能な入射方向)との関係を実質的に表す情報である。また、補正テーブル145により受光面上の位置と補正係数とが関係付けられていることから、補正用入射角テーブル144および補正テーブル145は受光素子111aに入射する光束の入射方向と補正係数との関係を表す情報であり、これらの情報は図3中のステップS11における補正情報に相当する。
【0050】
図9は図7中のステップS21の動作の詳細を示す流れ図である。また、図10は補正用入射角テーブル144を生成する様子を示す図であり、図11は補正テーブル145を生成する様子を示す図である。
【0051】
図10(a)および(b)に示すように補正用入射角テーブル144は予めRAM133に記憶されている4つの基本入射角テーブル161(図10中、符号「161a」、「161b」、「161c」、「161d」を付す。)から2種類(符号「144a」、「144b」を付す。)生成される。また、図11(a)および(b)に示すように補正テーブル145も4つの基本補正テーブル162(図11中、符号「162a」、「162b」、「162c」、「162d」を付す。)から2種類(符号「145a」、「145b」を付す。)生成される。
【0052】
2種類の補正用入射角テーブル144および2種類の補正テーブル145は1つのブロック内の基準補正係数を求める際にいずれか1種類のみが利用される。このように2種類準備される理由については後述する。
【0053】
4つの基本入射角テーブル161は、光軸中心121bから受光素子111aまでの距離Rcと、光軸121aと光束中心Lcとがなす角θとの関係を光学系121の4つの状態に関して示すテーブルであり、4つの状態としては、カメラレンズである光学系121の瞳の位置が最も近くなるズーム位置(以下、「瞳近」という。)であって絞りが最も絞られた状態(以下、Fナンバーを用いて「F22」という。)、瞳近であって絞りが最も開放された状態(以下、Fナンバーを用いて「F6.7」という。)、瞳の位置が最も遠くなるズーム位置(以下、「瞳遠」という。)であってF22の状態、および、瞳遠であってF6.7の状態が採用される。なお、これらの基本入射角テーブル161は、光学系121の仕様に基づく理論的計算により予め算出されてRAM133に記憶される。
【0054】
補正用入射角テーブル144を求めるに際し、まず、レンズユニット102のドライバ122から撮影時の絞りの状態を示す値(以下、具体例として「F11」とする。)が取得される(図9:ステップS31)。そして、図10(a)に示すように、補正テーブル算出部141は瞳近であってF22の状態に対応する基本入射角テーブル161aおよび瞳近であってF6.7の状態に対応する基本入射角テーブル161bを内挿することにより、瞳近であってF11の状態に対応する補正用入射角テーブル144aを生成する(ステップS32)。すなわち、各距離RcにおけるF22とF6.7とに対応するθの値をF11を基準として内挿する。
【0055】
続いて同様の処理により、図10(b)に示すように、瞳遠であってF22の状態に対応する基本入射角テーブル161cおよび瞳遠であってF6.7の状態に対応する基本入射角テーブル161dを内挿することにより、瞳遠であってF11の状態に対応する補正用入射角テーブル144bを生成する(ステップS33)。
【0056】
以上の処理により、瞳近と瞳遠とのそれぞれについて撮影時の絞りの状態に対応する2つの補正用入射角テーブル144a,144bが生成される。なお、後述する基準補正係数を求める際に角θから距離Rcを求める処理を行うことから、距離Rcの増加に対して角θの変化が単調ではない場合には角θの算出を中断し、距離Rcと角θとを強制的に1対1に対応させる。
【0057】
補正用入射角テーブル144の生成が完了すると、次に、4つの基本補正テーブル162から2つの補正テーブル145が生成される。4つの基本補正テーブル162は4つの基本入射角テーブル161に対応しており、それぞれ光学系121が瞳近であってF22の状態、瞳近であってF6.7の状態、瞳遠であってF22の状態、および、瞳遠であってF6.7の状態に対応している。なお、これらの基本補正テーブル162はこれらの状態にて均一照明された均一濃度の被写体を撮影し、この画像がCCDの感度ムラを考慮した上で均一の輝度となる補正係数の2次元配列として予め求められてRAM133に記憶されている。このような作業はデジタルカメラ100の組立時等に行われる。
【0058】
そして、図11(a)に示すように、撮影時の絞りの状態であるF11を基準に、瞳近であってF22の状態に対応する基本補正テーブル162aおよび瞳近であってF6.7の状態に対応する基本補正テーブル162bの各補正係数を内挿することにより、瞳近であってF11の状態に対応する補正テーブル145aを生成する(ステップS34)。また、図11(b)に示すように、瞳遠であってF22の状態に対応する基本補正テーブル162cおよび瞳遠であってF6.7の状態に対応する基本補正テーブル162dの各補正係数を内挿することにより、瞳遠であってF11の状態に対応する補正テーブル145bを生成する(ステップS35)。なお、上記ステップS32ないしS35の処理は任意の順序で行われてよい。
【0059】
以上の処理により、瞳近と瞳遠とのそれぞれについて撮影時の絞りの状態における2つの補正テーブル145a,145bが2つの補正用入射角テーブル144a,144bに対応して生成される。
【0060】
このデジタルカメラ100では補正情報として補正用入射角テーブル144と補正テーブル145との組合せを2種類準備する。そして、CCD111上の各ブロックにおける基準補正係数を求める際にはこれらの組合せの一方のみを利用する。これは、特殊な光学系にも対応することを目的としている。
【0061】
図12は瞳近の状態と瞳遠の状態とにおいて光学系121の光軸121aと入射光束の光束中心Lcとがなす角θが、CCD111の受光面の光軸中121b心から隅の方へと遠ざかるにつれて変化する様子を示す図である。グラフ201は瞳近の状態において図13(a)に示すように光束中心Lcが光軸121aから漸次遠ざかる場合を示し、グラフ202は瞳遠の状態において図13(b)に示すように光束中心Lcが光軸121aに漸次近づく場合を示す。また、グラフ203は瞳近と瞳遠との間の状態における角θの変化の様子を示す。
【0062】
図12に示すように、このデジタルカメラ100では瞳近の状態と瞳遠の状態とでは光軸中心から離れるに従って角θの変化の様子が大きく異なる。したがって、ブロックの基準補正係数を求める際にブロックの中心である基準位置に入射する光束の光束中心Lcが光軸121aから漸次離れる場合には瞳近の状態に関する補正用入射角テーブル144aおよび補正テーブル145aを利用し、光束中心Lcが光軸121aに漸次近づく場合には瞳遠の状態に関する補正用入射角テーブル144bおよび補正テーブル145bを利用する。以上の理由により、デジタルカメラ100では2種類の補正情報を準備してこれらを使い分けてより適切なシェーディング補正を実現している。
【0063】
なお、一般のカメラレンズでは、図13(a)にて示すように受光素子に入射する光束の光束中心Lcは漸次光軸121aから離れるため、準備する補正情報は瞳近の状態の補正用入射角テーブル144aおよび補正テーブル145aのみでよい。
【0064】
<2.2.2 入射方向の算出>
図7に示すステップS21が完了すると、次に、図6に示す入射角テーブル算出部151が入射角テーブル152を生成する(ステップS22)。入射角テーブル152とは、撮影時のズーム位置および絞りの状態においてCCD111の光軸中心121bから受光素子111aまでの距離Rcと、この受光素子111aに入射する光束の光束中心Lcと光軸121aとがなす角θとの関係を示すテーブルである。
【0065】
図14は入射角テーブル152を生成する処理の流れを示す流れ図である。入射角テーブル152は既述の4つの基本入射角テーブル161を内挿することにより生成されるが、内挿の条件を取得するために、まず、入射角テーブル算出部151がレンズユニット102からレンズユニットの種類を取得し(ステップS41)、さらに、レンズユニット102から撮影時のズーム位置および撮影時の絞りの状態を示す値(この例の場合、F11)を取得する(ステップS42)。
【0066】
次に、入射角テーブル算出部151は取得したレンズユニットの種類からレンズユニットテーブル163を参照してユニット標準角θuを取得する(ステップS43)。ユニット標準角θuとは絞りが最も絞られた状態(具体的には、F22)にてCCD111上の光軸中心121bから所定距離だけ離れた位置に入射する光束の光束中心Lcが光軸121aとなす角を示す値であり、光学系121の種類およびズーム位置に応じて光束全体がどれだけの程度で漸次広がりつつ(あるいは、漸次収束しつつ)CCD111へと導かれるのかを示す指標値である。なお、絞りが最も絞られた状態にてユニット標準角θuが規定されるのは、光学系121のレンズの外周や光学部品の縁による影響を受けることなく指標となる角を規定することができるからである。
【0067】
図15はレンズユニットテーブル163の具体例を示す図である。レンズユニットテーブル163のユニット番号は交換可能なレンズユニット102の種類を示す番号である。ズーム位置は2桁の16進数にて表されており、情報量を低減するために1桁目が0の場合だけがレンズユニットテーブル163に記録されている。そして、各行にはユニット番号に対応するレンズユニット102ついて、各ズーム位置のユニット標準角θuが格納される。
【0068】
例えば、撮影時にレンズユニット102からユニット番号が「02」であり、ズーム位置が「30」に設定されているとの情報が取得されると、入射角テーブル算出部151が現在のユニット標準角θuを「−1.0」であると特定する。なお、図15では他の欄のユニット標準角θuの値の記載を省略している。
【0069】
ユニット標準角θuを取得すると、次に、図16に示すように既述の4つの基本入射角テーブル161のうち、絞りの状態がF22である2つの基本入射角テーブル161a,161cをユニット標準角θuに基づいて内挿し、撮影時のズーム位置であってF22の状態に対応する入射角テーブル161eを一時的に生成する(ステップS44)。具体的には、ユニット標準角θuは光軸中心121bから所定の距離Rc(この例の場合、Rc=3.0)に位置する受光素子111aに入射する光束の光軸121aに対する傾きを表すことから、この距離Rc(=3.0)における角θの値が取得したユニット標準角θu(=−1.0)となるように両基本入射角テーブル161a,161cのそれぞれの角θを内挿する。
【0070】
同様の内挿比により、絞りの状態がF6.7である2つの基本入射角テーブル161b,161dを内挿し、撮影時のズーム位置であってF6.7の状態に対応する入射角テーブル161fを一時的に生成する(ステップS45)。
【0071】
さらに、生成した2つの一時的な入射角テーブル161e,161fを絞りの状態に関して内挿し、撮影時のズーム位置であってF11の状態に対応する最終的な入射角テーブル152を生成する(ステップS46)。これにより、撮影時の光学系121の状態における光軸中心121bからの距離Rcと距離Rcの位置に入射する光束の光束中心Lcと光軸121aとがなす角θとの関係が求められる。
【0072】
なお、入射角テーブル152を生成するにあたり、ズーム位置の2つの状態(すなわち、瞳近、瞳遠)に関する基本入射角テーブル161のみならずそれぞれのズーム位置について絞りの2つの状態に関する計4つの基本入射角テーブル161を予め準備しているが、これは、光学系121が複数枚のレンズを有する場合に、あるいは、光学系121の機構上の制約を受けることにより、絞りの状態に応じて光束中心Lcの傾きが変化することを考慮するためである。
【0073】
<2.2.3 補正係数の算出およびシェーディング補正>
図7に示すステップS22の処理が完了すると、次に、入射角算出部150がCCD111上の予め区分けされている複数のブロックのうちの1つに注目し、このブロックの中心を基準位置として特定するとともに、基準位置へ入射する光束(すなわち、光束中心Lc)の傾きを求める(ステップS23)。
【0074】
図17はステップS23の処理の流れを示す流れ図である。また、図18はCCD111上の1つのブロック300を例示する図である。
【0075】
ステップS23では、まず、CCD111上の光軸中心121bの座標を(0,0)とし、注目するブロック300の中心の座標(Xs,Ys)を基準位置310として求める(ステップS51)。そして、光軸中心121bから基準位置310までの実際の距離(すなわち、光軸121aから基準位置310までの距離)を基準距離Rsとして求める(ステップS52)。例えば、基準位置310の座標が(−200,400)であり、CCD111の各受光素子の縦横の幅(すなわち、画素ピッチ)が6.25[μm]である場合には、基準距離Rsは2.8[mm]となる。
【0076】
基準距離Rsが求められると、次に、入射角算出部150が入射角テーブル152を参照して基準距離Rsに位置する受光素子に入射する光束の光束中心Lcが光軸121aとなす角を基準入射角θsとして求める(ステップS53)。具体的には、図16に示す入射角テーブル152における距離Rcに関して2.5と3.0との間で内挿を行い、距離Rcが基準距離Rs(=2.8[mm])であるときの角θ(=−1.1[゜])を基準入射角θsとして求める。
【0077】
なお、図8を用いて説明したように、光束中心Lcは光軸121aを含む1つの面に沿う方向を向くことから、基準入射角θsを求めることにより基準位置310に入射する光束の入射方向(3次元ベクトルにて表現可能な入射方向)を特定することができる。すなわち、基準入射角θsを求める処理は実質的には基準位置310に位置する受光素子への光束の入射方向を求めることに相当し、図3中のステップS12に相当する処理といえる。
【0078】
図7中のステップS23により基準入射角θsが求められると、この基準入射角θsが図6に示す入射角算出部150から補正部140の基準補正係数算出部142へと送られ、補正用入射角テーブル144および補正テーブル145を参照して基準位置310における補正係数が基準補正係数として求められる(ステップS24)。図19はステップS24の内容を示す流れ図である。
【0079】
まず、基準入射角θsを受け取った基準補正係数算出部142は、基準入射角θsの符号を確認し(ステップS61)、基準入射角θsが正(または、0)である場合には瞳近の状態に関する補正用入射角テーブル144aおよび補正テーブル145aを選択する(ステップS62)。一方、基準入射角θsが負の場合には瞳遠の状態に関する補正用入射角テーブル144bおよび補正テーブル145bを選択する(ステップS63)。
【0080】
次に、選択された補正用入射角テーブル(以下、単に「補正用入射角テーブル144」という。)および選択された補正テーブル(以下、単に「補正テーブル145」という。)を参照して基準補正係数が求められる(ステップS64〜S66)。
【0081】
図20は基準補正係数を求める方法(ステップS64〜S66)の原理を説明するための図であり、図20(a)は撮影時の光学系121の状態における光束中心LcのCCD111への広がりの様子を示し、図20(b)は瞳近であって撮影時の絞りの状態(すなわち、補正用入射角テーブル144aおよび補正テーブル145aに対応する状態)における光束中心LcのCCD111への広がりの様子を示し、図20(c)はCCD111を光軸121aに沿う方向から見たときの様子を示す図である。
【0082】
図20(a)および(b)に示すように、撮影時の光束中心Lcの広がりの度合いは瞳が最も近づくズーム位置の場合の光束中心Lcの広がりの度合いよりも小さい。ここで、図20(c)にて示すように、光軸中心121bから基準位置310へと向かう半直線上のある位置320において、図20(b)に示すように入射する光束の光束中心Lcが光軸121aに対して基準入射角θsだけ傾く場合には、この位置320に対応する補正係数を補正テーブル145から求め、これを基準位置310に対応する基準補正係数とすることができる。位置320では基準位置310と同方向から光束が入射するからである。なお、撮影時に光束中心Lcが光軸121aに漸次近接する場合には、図20(b)は瞳遠であって撮影時の絞りの状態(すなわち、補正用入射角テーブル144bおよび補正テーブル145bに対応する状態)における図となる。
【0083】
以上のことから、基準補正係数を求める際には、まず、図20(b)に示す位置320と光軸中心121bとの距離を補正用距離Rmとして求める(ステップS64)。例えば、基準入射角θsが−1.1[゜]である場合には、補正用入射角テーブル144bが参照され、θが−1.1[゜]となるときの距離Rc(=1.0[mm])が補正用距離Rmとして求められる。
【0084】
次に、位置(以下、「補正用位置」という。)320の座標を基準位置310の座標に、
【0085】
【数1】
を乗じて求める(ステップS65)。例えば、基準距離Rsが2.8[mm]、補正用距離Rmが1.0[mm]、基準位置310の座標(Xs,Ys)が(−200,400)である場合には補正用位置320の座標(Xm,Ym)は(−71,142)と求められる。
【0087】
補正テーブル145の各補正係数は、この補正係数が用いられるべき受光素子の座標に関連づけられている。図21は補正テーブル145に記憶されている補正係数と座標との関係の例の一部を図示したものである。図21に示すように、補正テーブル145では全ての座標位置(縦方向、横方向に1ずつ離れた全ての座標位置)と補正係数が対応付けられている訳ではなく、適宜間隔をおいた位置と補正係数とが関連づけられている。これは近接する画素間ではシェーディングの度合いが大きく変化しないことを利用して補正テーブル145の情報量を削減することによるコスト削減を目的としている。例えば、均一照明された均一濃度の被写体を撮影して基本補正テーブル162を生成する際に適宜間引き処理、あるいは、代表する座標位置の補正係数を周囲の補正係数の平均値とする処理等を行うことで基本補正テーブル162の生成時点で情報量の削減が図られている。
【0088】
したがって、求められた補正用位置320の座標は必ずしも補正係数に関連づけられた座標と一致するとは限らない。そこで、補正用位置320が求められると、この補正用位置320に近接する4つの座標に関連づけられた補正係数を補正テーブル145から読み出し、これらの4つの補正係数を座標に関して内挿し、補正用位置320における補正係数を基準位置310に対応する基準補正係数として求める(ステップS66)。図21に示す4つの補正係数の例の場合、座標(−71,142)の補正用位置320の補正係数が1.06として求められる。
【0089】
以上に説明した基準入射角θsの算出(図7:ステップS23)および基準補正係数の算出(ステップS24)を全てのブロックについて繰り返し行うことにより、全ブロックの基準補正係数が求められる(ステップS25)。
【0090】
全てのブロックの基準補正係数が求められると、基準位置に位置する受光素子以外の受光素子に対する補正係数が補正係数補間部143による補間処理により求められる。なお、1つのブロック内の受光素子からの出力は基準補正係数により一律に補正されてもよいが、ブロック間の境界を目立たなくさせてより適切な補正を行うためにこのデジタルカメラ100では各受光素子に対応する補正係数を周囲の基準位置の基準補正係数を線形補間して求めるようにしている。
【0091】
図22は補正係数を求める対象となる受光素子の位置330について、周囲の基準位置310a,310b,310c,310dの基準補正係数に基づいて補正係数を求める処理を説明するための図である。補正係数を求めるに際し、まず、対象となる受光素子の位置330と各基準位置310aないし310dとを対角線上の頂点として有する矩形の面積が求められる。これにより、図22中に示す矩形310a,311a,330,311d、矩形310b,311b,330,311a、矩形310c,311c,330,311b、矩形310d,311d,330,311cのそれぞれの面積がAa,Ab,Ac,Adとして求められるものとする。
【0092】
次に、基準位置310a,310b,310c,310dの基準補正係数がそれぞれKa,Kb,Kc,Kdであるものとして、
【0093】
【数2】
にて示される演算を行って位置330に位置する受光素子に対する補正係数を求める。この処理により、各補正係数の値が位置330に対して反対側に位置する矩形の面積の割合に応じて加算されて位置330における補正係数が求められることとなる。
【0095】
以上の補間処理を全ての受光素子に関して行うことにより、マイクロレンズの影響によるシェーディングを補正するための補正係数が全受光素子について求められる(ステップS26)。
【0096】
さらに、予め求められている各受光素子の光電変換特性のばらつき(光学系121の状態変化に依存しないばらつきであり、いわゆる、感度ムラをいう。)を補正するための補正係数がステップS26にて求められた補正係数に乗算され、マイクロレンズによるシェーディングおよび光電変換特性のばらつきの双方を考慮した最終的な補正係数が求められる(ステップS27)。例えば、マイクロレンズによるシェーディングに対する補正係数が1.3であり、光電変換特性のばらつきに対する補正係数が1.2の場合には最終的な補正係数は1.56となる。なお、光電変換特性のばらつきを補正するための補正係数は、予めCCD111に均一な平行光線を照射し、このとき各受光素子からの出力が同一となる係数として求められRAM133に記憶される。
【0097】
最終的な補正係数が求められると、各受光素子からの出力である画像中の各画素の画素値に補正係数が乗算され、マイクロレンズによるシェーディングおよび光電変換特性のばらつきについて補正された画像が得られる(ステップS28)。その後、さらに必要な処理が画像に適宜施され、図5に示すメモリスロット114を介してメモリカード114aに記憶される。
【0098】
また、撮影ごとに図7に示した処理が行われ、撮影ごとに異なる光学系121の種類および状態に応じて適切な補正が行われる。
【0099】
以上、この発明の第1の実施の形態であるデジタルカメラ100の構成およびシェーディング補正等の動作について説明してきたが、デジタルカメラ100では受光素子への光束の入射方向と補正係数との関係を表す情報として補正用入射角テーブル144および補正テーブル145を予め記憶しているので、受光素子への光束の入射方向により複雑に変化するマイクロレンズの影響によるシェーディングを適切に補正することができる。
【0100】
また、所定のレンズ配置(例えば、瞳近や瞳遠)における受光素子の位置と補正係数との関係を補正テーブル145として記憶し、また、このレンズ配置にて各受光素子へと入射する光束の光束中心が光軸121aとなす角、すなわち、受光素子の位置と入射光束の入射方向との関係を示す情報を補正用入射角テーブル144として記憶することから、ズーム位置(すなわち、レンズ配置)の変化により複雑に変化するシェーディングをこれらのテーブルを用いて補正することができる。その結果、少ない記憶容量にて任意のズーム位置における適切な補正を行うことができる。
【0101】
また、補正テーブル145は均一照明される均一濃度の被写体を実際に撮影することにより求められるので、CCD111の個体差の影響を受けないシェーディング補正が実現される。なお、光電変換特性のばらつきの補正も実際の撮影を通じて補正係数が求められるので、光電変換特性のばらつきについてもCCD111の個体差の影響を受けない補正が実現され、過補正および補正不足が防止される。
【0102】
また、デジタルカメラ100ではCCD111の受光面を複数のブロックに区分けし、これらのブロックにおける基準位置の補正係数を基準補正係数として求め、基準補正係数を補間して全ての受光素子に対する補正係数を求めている。これにより、補正情報に基づく補正係数の算出処理の負担を軽減し、補正係数の迅速な算出を実現している。
【0103】
また、受光素子に入射する光束の光束中心が光学系121の光軸に漸次近接する場合と漸次離れる場合とのそれぞれについて2種類の補正情報を適宜使い分けるので、より適切な補正を実現している。
【0104】
また、光学系121においてレンズ配置および絞りの状態が互いに異なる場合の4つの基本入射角テーブル161を内挿することにより入射角テーブル152を求めるので、撮影時の光学系121のレンズ配置および絞りの状態での基準位置に入射する光束の入射方向を容易に求めることができる。
【0105】
さらに、デジタルカメラ100では補正係数の算出に際してレンズユニット102の種類に固有の情報をレンズユニットテーブル163として記憶することにより、レンズユニット102の交換に対しても適切に対応することができる。
【0106】
<3. 第2の実施の形態>
図23はこの発明の第2の実施の形態であるデジタルカメラ100aの外観を示す斜視図である。デジタルカメラ100aは第1の実施の形態に係るデジタルカメラ100とほぼ同様の構成であり、図15に示したレンズユニットテーブル163に関する部分についてのみ異なる。図23では図4に示したデジタルカメラ100と同様の構成については同様の符号を付している。
【0107】
第1の実施の形態では、交換可能なレンズユニット102の種類に応じた固有の値であって補正係数を求める際に利用されるものをレンズユニットテーブル163として本体部101内に記憶しておくようになっているが、第2の実施の形態に係るデジタルカメラ100aでは、レンズユニット102内部にレンズユニット102固有の情報を記憶する。
【0108】
具体的には、図15に示すレンズユニットテーブル163のうち、レンズユニットの種類に対応する部分(図15のレンズユニットテーブル163の1行分)をレンズユニット102内の回路基板123上に配置されたメモリ124に記憶する。
【0109】
このように、レンズユニット102固有の情報をレンズユニット102に持たせることにより、本体部101ではレンズユニットテーブル163を記憶する必要がなくなり、本体部101に設けられるメモリの記憶容量を低減することができる。
【0110】
また、本体部101とは別にレンズユニット102が後発的に開発された場合であっても、本体部101の設計変更やメモリの書き換えを行うことなく適切にシェーディング補正を行うことができる。
【0111】
<4. 第3の実施の形態>
次に、第3の実施の形態として、第1の実施の形態において説明した補正係数補間部143による基準補正係数の補間処理(図7:ステップS26)の他の例を説明する。
【0112】
図24に示す縦横に配列された各矩形領域はCCD111上の受光素子の配列を模式的に表したものであり、各矩形領域は1つの受光素子に対応している。また、符号310a,310b,310c,310dを付す4つの矩形領域は基準位置310を表しており、これら4つの矩形領域内に記入された数値は基準補正係数を示す。なお、便宜上、実際の補正係数を100倍して記入している。
【0113】
図24に示すように、基準補正係数が縦方向に同一である場合には、これら4つの基準補正係数を線形補間(例えば、図22および数2を用いて説明した補間)を行い、4つの基準位置310aないし310dにより規定される領域312(図24中、太線にて囲む4×4個の矩形領域)の各補正係数を求めると補正係数の値が縦方向に同一となる。図25は図24と同様に基準補正係数が縦方向に同一であり、左右方向で1だけ異なる場合の補間例を示す図である。なお、これらの図において補正係数の値に応じて領域312内の各矩形領域に平行斜線を付している。
【0114】
図24および図25に示すように、単に基準補正係数を線形的に補間するのみであると、基準補正係数が縦方向あるいは横方向等に揃ってしまう可能性がある。これにより、シェーディング補正により画像に縞模様が現れる。このような縞模様は画像の品質を低下させる原因となる。そこで、第3の実施の形態では補間処理の際に人為的にノイズ成分を付与することにより、補正後の画像を観察者の目に違和感のないものとしている。
【0115】
図26(a)ないし(d)はノイズ成分を与えた補間に用いられるテーブルを示し、図26(a),(b),(c),(d)のテーブルはそれぞれ基準位置310a,310b,310c,310dに対応付けられる。また、各テーブル中の数値の位置は4つの基準位置310aないし310dの位置に対応している。
【0116】
図27は図26(a)ないし(d)に示すテーブルを用いて基準補正係数を補間して補正係数を求めた結果を示す図である。例えば、図27の領域312における左から3番目、上から2番目の矩形領域の補正係数を求める際には、左上の基準位置310aの基準補正係数「137」に図26(a)に示すテーブル中の左から3番目、上から2番目の数値「0.09」を乗じ、同様に、右上の基準位置310bの基準補正係数「133」に図26(b)に示すテーブル中の同位置の数値「0.21」を乗じ、右下の基準位置310cの基準補正係数「133」に図26(c)に示すテーブル中の同位置の数値「0.49」を乗じ、左下の基準位置310dの基準補正係数「137」に図26(d)に示すテーブル中の同位置の数値「0.21」を乗じ、これらの値の和をこの位置における補正係数「134」として求める。
【0117】
同様の手法により補正係数を求めた他の例を図28に示す。また、図29に例示すように基準位置310および基準補正係数が存在し、これらの基準位置310により規定される8×8個の矩形領域(図29中、符号313にて示す平行斜線にて縁取りされた領域)の補正係数を求めた場合において、求められた補正係数の値を高さとして立体的に表現したものを図30に示す。
【0118】
図26(a)ないし(d)のテーブルは、通常の線形補間に用いる係数から若干異なった値を格納している。したがって、これらのテーブルを用いて補間を行った結果である図27および図28では、基準補正係数が縦方向に同一であるにもかかわらず領域312内の補正係数は縦方向に揃わない。図30に示す補間結果においても同様である。すなわち、補間の際に人為的にノイズ成分を付与することにより、補間による縞模様の発生を防止することができ、観察者に違和感のない画像を得ることができる。
【0119】
<5. 変形例>
以上この発明に係る実施の形態について説明してきたが、この発明は上記実施の形態に限定されるものではなく様々な変形が可能である。
【0120】
例えば、上記実施の形態では、基準位置310をブロックの中心としているが、基準位置310はブロックの中心に限定されるものではない。また、画素数が多くないとき、高精度に補正したいとき、あるいは、補正時間に余裕があるときは1つの受光素子に1つの基準位置310が対応付けられるものとして、全受光素子に対して図7に示すステップS23およびS24を繰り返し行ってもよい。この場合、補間処理(ステップS26)は不要となる。すなわち、基準位置310は任意に設定されてよく、基準位置310に関連する受光素子に対する補正係数が求められればよい。
【0121】
また、画像に対する補正は、A/D変換回路134から1画素の情報が取得されるごとに行われてもよく、画像全体の情報が取得されてから一括して行われてもよい。
【0122】
また、上記実施の形態では補正用入射角テーブル144および補正テーブル145を補正情報として利用しているが、補正情報は受光素子に入射する光束の入射方向と出力に対する補正係数との関係を実質的に表すものであればどのようなものであってもよい。
【0123】
また、上記実施の形態では、光学系121のズーム位置および絞りの状態から受光素子への光束の入射方向を求めているが、光学系121からの他の情報を利用して受光素子への光束の入射方向を求めてもよい。
【0124】
また、上記実施の形態では、絞りに対して補正係数が線形に変化するという前提に基づいて2つの基本補正テーブル162から1つの補正テーブル145を求めているが、より厳密な補正テーブル145を求めるために3以上の基本補正テーブル162から、あるいは、非線形な内挿を行って1つの補正テーブル145を求めるようにしてもよい。
【0125】
同様に、上記実施の形態では、ズーム位置および絞りに対して角θが線形に変化するという前提に基づいて4つの基本入射角テーブル161から1つの入射角テーブル152および2つの補正用入射角テーブル144を求めているが、さらに多くの基本入射角テーブル161から、あるいは、非線形な内挿を行って入射角テーブル152や補正用入射角テーブル144を求めるようにしてもよい。
【0126】
また、上記実施の形態では、瞳近の場合と瞳遠の場合とに分けて2種類の補正用入射角テーブル144および補正テーブル145を生成しているが、既述のように、通常のカメラレンズでは、基準入射角θsが正となることから1種類の補正用入射角テーブル144および補正テーブル145が生成されてもよい。逆に、基準入射角θsの範囲に応じて3種類以上の補正用入射角テーブル144および補正テーブル145が使い分けられてもよい。
【0127】
また、上記実施の形態では、レンズユニット102に光学系121が設けられるものとして説明したが、光学系121の一部のみがレンズユニット102に設けられ、他の部分が本体部101に設けられてもよい。
【0128】
また、上記実施の形態では、図26(a)ないし(d)に示すテーブルを用いてノイズ成分を与えた基準補正係数の補間を行っているが、これらのテーブルの数値およびテーブルの大きさは一例にすぎず、適宜決定されてよい。
【0129】
また、上記実施の形態では、ステップS21において補正情報が生成されてからステップS22において入射角テーブル152が生成されると説明したが、これらのステップは並行に行われてもよく、逆順に行われてもよい。
【0130】
また、上記実施の形態ではデジタルカメラが1つのCCD111を有するが、複数のCCDにより画像を取得し、これらの画像を継ぎ合わせて1つの画像を生成するデジタルカメラにもこの発明は利用可能である。この場合、ユニット標準角θuに対応する位置(CCDの中心からの距離)をCCDの隅とすることにより、画像の継ぎ合わせ位置を目立たなくすることができる。なお、複数のCCDを用いる場合には、基本補正テーブル162の個数はCCDの個数の4倍となる。
【0131】
さらに、この発明はデジタルカメラにおけるシェーディング補正に限定されるものではなく、ビデオカメラ等の各種撮像装置に利用可能である。また、2次元的な画像のシェーディング補正に限定されるものではなく、1次元画像のシェーディング補正にも利用可能である。
【0132】
【発明の効果】
請求項1ないし8に記載の発明では、マイクロレンズが形成された複数の受光素子を用いて画像を取得する際に、光学系の状態の変化により複雑に変化するシェーディングを適切に補正することができる。
【0133】
また、これら請求項1ないし8に記載の発明では、補正用入射角情報および補正テーブルにより、補正情報の量を低減することができる。
【0134】
また、請求項2に記載の発明では、補正テーブルに格納される補正係数の数を削減できるので、補正情報の量を低減することができる。
【0135】
また、請求項3に記載の発明では、2つの補正情報のうちの1つを選択して用いるので、補正をより適切に行うことができる。
【0136】
また、請求項4に記載の発明では、複数の基本テーブルの内挿を行うことにより、基準位置に入射する光束の入射方向を容易に取得することができる。
【0137】
また、請求項5に記載の発明では、交換ユニットの種類に応じて適切に補正を行うことができる。
【0138】
また、請求項6に記載の発明では、撮像装置本体とは別に開発される交換ユニットに容易に対応することができる。
【0139】
また、請求項7に記載の発明では、基準位置の補正係数の補間による画像中の縞模様の発生を防止することができ、観察者に違和感のない画像を得ることができる。
【図面の簡単な説明】
【図1】(a)はマイクロレンズを有する受光素子の平面図であり、(b)ないし(d)は縦断面図である。
【図2】(a)ないし(c)は様々な形状のマイクロレンズを有する受光素子の縦断面図である。
【図3】この発明におけるシェーディング補正の処理の流れの概要を示す流れ図である。
【図4】この発明の第1の実施の形態に係るデジタルカメラの外観を示す斜視図である。
【図5】図4に示すデジタルカメラの機械的構成を示すブロック図である。
【図6】図4に示すデジタルカメラの機能面からの構成を示すブロック図である。
【図7】図4に示すデジタルカメラにおけるシェーディング補正の処理の流れを示す流れ図である。
【図8】CCD上の光軸中心からの距離と入射光束の光束中心の傾きとの関係を示す斜視図である。
【図9】補正用入射角テーブルおよび補正テーブルを生成する処理の流れを示す流れ図である。
【図10】補正用入射角テーブルを生成する様子を示す図である。
【図11】補正テーブルを生成する様子を示す図である。
【図12】瞳近の状態と瞳遠の状態における光軸中心からの距離と入射光束の傾きとの関係を示す図である。
【図13】(a)は瞳近の状態におけるCCD上の各位置への光束の入射の様子を示す図であり、(b)は瞳遠の状態におけるCCD上の各位置への光束の入射の様子を示す図である。
【図14】入射角テーブルを生成する処理の流れを示す流れ図である。
【図15】レンズユニットテーブルの例を示す図である。
【図16】入射角テーブルを生成する様子を示す図である。
【図17】基準位置に入射する光束の傾きを求める処理の流れを示す流れ図である。
【図18】CCD上のブロックと基準位置とを示す図である。
【図19】基準補正係数を求める処理の流れを示す流れ図である。
【図20】(a)は撮影時に基準位置に入射する光束の様子を示す図であり、(b)は瞳近の状態において補正用位置に入射する光束の様子を示す図であり、(c)は基準位置と補正用位置との関係を示す図である。
【図21】補正テーブル内の補正係数に関連づけられた位置と補正用位置とを示す図である。
【図22】4つの基準位置の基準補正係数を補間して補正係数を求める際の処理を説明するための図である。
【図23】この発明の第2の実施の形態に係るデジタルカメラの外観を示す斜視図である。
【図24】基準補正係数を線形補間した例を示す図である。
【図25】基準補正係数を線形補間した他の例を示す図である。
【図26】(a)ないし(d)は4つの基準補正係数をノイズ成分を与えながら補間する際に用いられるテーブルを示す図である。
【図27】基準補正係数をノイズ成分を与えながら補間した例を示す図である。
【図28】基準補正係数をノイズ成分を与えながら補間した他の例を示す図である。
【図29】基準位置と補間される領域とを示す図である。
【図30】基準補正係数をノイズ成分を与えながら補間したさらに他の例を示す立体図である。
【図31】CCDの受光面を示す図である。
【図32】図31中のCa−Z−Cb間の受光素子からの出力に基づく輝度分布を示す図である。
【図33】図31中のCc−Z−Cd間の受光素子からの出力に基づく輝度分布を示す図である。
【符号の説明】
10 受光素子
13 マイクロレンズ
100,100a デジタルカメラ
102 レンズユニット
111 CCD
121 光学系
124 メモリ
131 CPU
132 ROM
133 RAM
134 A/D変換回路
135 補正回路
140 補正部
142 基準補正係数算出部
143 補正係数補間部
144a,144b 補正用入射角テーブル
145a,145b 補正テーブル
152 入射角算出部
161a〜161d 基本入射角テーブル
163 レンズユニットテーブル
310 基準位置
S11〜S14,S21〜S27 ステップ
Claims (8)
- 被写体からの光を所定の受光面へと導く光学系と、
それぞれにマイクロレンズが形成された複数の受光素子を前記受光面に配列配置し、当該複数の受光素子からの出力に基づいて前記被写体の画像を取得する撮像手段と、
受光素子に入射する光束の入射方向と当該受光素子からの出力に対するシェーディング補正の補正係数との関係である補正情報を予め記憶する補正情報記憶手段と、
前記受光面に複数の基準位置が設定されており、前記光学系の状態を示す情報に基づいて基準位置に入射する光束の入射方向を取得する入射方向取得手段と、
基準位置への光束の入射方向および前記補正情報に基づいて当該基準位置に関連する受光素子からの出力に対するシェーディング補正を行う補正手段と、
を備え、
前記補正情報が、
前記光学系の所定のレンズ配置において、前記受光面上の位置と当該位置へと入射する光束の入射方向との関係を示す補正用入射角情報と、
前記所定のレンズ配置において前記受光面上の位置に関連づけられた補正係数の集合である補正テーブルと、
を有し、
前記補正手段が、
前記入射角方向取得手段により取得された基準位置に入射する光束の入射方向が、所定レンズ配置において受光面上の光軸中心から当該基準位置へと向かう直線上の如何なる位置に入射する光束の入射方向に相当するのかを、前記補正用入射角情報を参照して求める手段と、
求められた位置の補正係数を前記補正テーブルを参照して求めることで、前記基準位置の補正係数を求める基準位置補正係数特定手段と、
を有することを特徴とする撮像装置。 - 請求項1に記載の撮像装置であって、
前記基準位置補正係数特定手段が、
求められた位置に近接する複数の位置の補正係数を前記補正テーブルを参照して求める手段と、
求められた複数の位置の補正係数を内挿することで前記基準位置の補正係数を求める手段と、
を有することを特徴とする撮像装置。 - 請求項1または請求項2に記載の撮像装置であって、
光束が前記光学系の光軸に漸次近づく場合と漸次離れる場合の2つの補正情報が準備されており、
前記入射方向取得手段により取得される入射方向に基づいて前記2つの補正情報のうちの1つが選択されることを特徴とする撮像装置。 - 請求項1ないし3のいずれかに記載の撮像装置であって、
前記光学系のレンズ配置および絞りに関する複数の状態における前記受光面上の光軸中心からの距離と入射光束の前記光軸に対する傾きとの関係を示す複数の基本テーブルを記憶する手段、
をさらに備え、
前記入射方向取得手段が、前記複数の基本テーブルを内挿することにより、前記光学系の撮影時の状態における基準位置に入射する光束の入射方向を取得することを特徴とする撮像装置。 - 請求項1ないし4のいずれかに記載の撮像装置であって、前記光学系の全部または一部が交換可能な交換ユニットとされ、
前記補正手段による補正に利用される値であって交換ユニットの種類に固有のものを当該種類に対応付けて記憶するユニット変数記憶手段、
をさらに備えることを特徴とする撮像装置。 - 請求項1ないし4のいずれかに記載の撮像装置であって、前記光学系の全部または一部が交換可能な交換ユニットとされ、
前記交換ユニットが、
前記補正手段による補正に利用される値であって前記交換ユニットの種類に固有のものを記憶する手段、
を有することを特徴とする撮像装置。 - 請求項1ないし6のいずれかに記載の撮像装置であって、
前記補正手段が、
前記複数の基準位置の補正係数をノイズ成分を与えつつ補間することにより前記複数の受光素子に対応する補正係数を求める手段、
を有することを特徴とする撮像装置。 - 所定の受光面に配列配置されるとともにそれぞれにマイクロレンズが形成された複数の受光素子を有し、被写体からの光を光学系を介して当該複数の受光素子へと導くことにより当該被写体の画像を取得する撮像装置において、取得される画像のシェーディングを補正するシェーディング補正方法であって、
受光素子に入射する光束の入射方向と当該受光素子からの出力に対するシェーディング補正の補正係数との関係である補正情報を準備する工程と、
前記受光面に複数の基準位置が設定されており、前記光学系の状態を示す情報に基づいて基準位置に入射する光束の入射方向を取得する入射方向取得工程と、
基準位置への光束の入射方向および前記補正情報に基づいて当該基準位置に関連する受光素子からの出力のシェーディング補正を行う補正工程と、
を有し、
前記補正情報が、
前記光学系の所定のレンズ配置において、前記受光面上の位置と当該位置へと入射する光束の入射方向との関係を示す補正用入射角情報と、
前記所定のレンズ配置において前記受光面上の位置に関連づけられた補正係数の集合である補正テーブルと、
を有し、
前記補正工程が、
前記入射角方向取得工程により取得された基準位置に入射する光束の入射方向が、所定レンズ配置において受光面上の光軸中心から当該基準位置へと向かう直線上の如何なる位置に入射する光束の入射方向に相当するのかを、前記補正用入射角情報を参照して求める工程と、
求められた位置の補正係数を前記補正テーブルを参照して求めることで、前記基準位置の補正係数を求める工程と、
を有することを特徴とするシェーディング補正方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03761099A JP3733771B2 (ja) | 1999-02-16 | 1999-02-16 | 撮像装置およびシェーディング補正方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP03761099A JP3733771B2 (ja) | 1999-02-16 | 1999-02-16 | 撮像装置およびシェーディング補正方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2000236480A JP2000236480A (ja) | 2000-08-29 |
| JP3733771B2 true JP3733771B2 (ja) | 2006-01-11 |
Family
ID=12502378
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP03761099A Expired - Fee Related JP3733771B2 (ja) | 1999-02-16 | 1999-02-16 | 撮像装置およびシェーディング補正方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3733771B2 (ja) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4574022B2 (ja) * | 2001-01-17 | 2010-11-04 | キヤノン株式会社 | 撮像装置及びシェーディング補正方法 |
| WO2005043891A1 (ja) * | 2003-10-31 | 2005-05-12 | Mitsubishi Denki Kabushiki Kaisha | 画像補正方法および撮像装置 |
| JP4946059B2 (ja) * | 2006-01-11 | 2012-06-06 | 株式会社ニコン | 撮像装置 |
| JP4994158B2 (ja) * | 2007-08-28 | 2012-08-08 | 三菱電機株式会社 | 画像補正装置 |
| JP5351195B2 (ja) * | 2011-03-08 | 2013-11-27 | 株式会社東芝 | 固体撮像装置および携帯情報端末 |
| JP5848027B2 (ja) * | 2011-05-16 | 2016-01-27 | 株式会社シグマ | 撮像装置 |
| JP5597776B2 (ja) * | 2011-12-28 | 2014-10-01 | 富士フイルム株式会社 | 撮像装置及びその画質補正方法並びに交換レンズと撮像装置本体 |
-
1999
- 1999-02-16 JP JP03761099A patent/JP3733771B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000236480A (ja) | 2000-08-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Green et al. | Multi-aperture photography | |
| US9204067B2 (en) | Image sensor and image capturing apparatus | |
| JP5825817B2 (ja) | 固体撮像素子及び撮像装置 | |
| TWI388877B (zh) | 具有第一及第二透鏡陣列的成像設備 | |
| EP2175632A1 (en) | Image processing apparatus and method | |
| US20040061774A1 (en) | Digital imaging system using overlapping images to formulate a seamless composite image and implemented using either a digital imaging sensor array | |
| US8773549B2 (en) | Image processing apparatus, image processing method, image pickup apparatus, and display device | |
| JP6838994B2 (ja) | 撮像装置、撮像装置の制御方法およびプログラム | |
| JP5914192B2 (ja) | 撮像装置及びその制御方法 | |
| JP6489932B2 (ja) | 画像処理装置、撮像装置、画像処理方法およびプログラム | |
| JP2000196939A (ja) | 歪曲収差及び面方向色収差のない画像形成装置及びその方法 | |
| JP2002064754A (ja) | 撮像装置の有効ダイナミックレンジを拡張する方法及び装置 | |
| JP3733771B2 (ja) | 撮像装置およびシェーディング補正方法 | |
| JP2013145982A (ja) | 撮像装置、画像処理装置及び方法 | |
| Piao et al. | Extended depth of field integral imaging using multi-focus fusion | |
| CN105939443B (zh) | 一种用于产生物体的图像的光场成像系统和方法 | |
| US10341580B2 (en) | Image processing device configured to correct an image so as to decrease output data | |
| CN111127379B (zh) | 光场相机2.0的渲染方法及电子设备 | |
| JP2018018425A (ja) | 画像処理装置及び画像処理方法 | |
| JP3678792B2 (ja) | 立体画像撮像装置 | |
| JP6039301B2 (ja) | 撮像装置、撮像システム、撮像装置の制御方法、プログラム、および、記憶媒体 | |
| JP5743769B2 (ja) | 画像処理装置および画像処理方法 | |
| JP7373297B2 (ja) | 画像処理装置、画像処理方法及びプログラム | |
| JP5973784B2 (ja) | 撮像装置及びその制御方法、プログラム、並びに記憶媒体 | |
| JP2020171050A (ja) | 画像処理装置、撮像装置、画像処理方法、および、記憶媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050603 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050607 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20050613 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20050701 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050804 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20050927 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051010 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091028 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101028 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101028 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111028 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20111028 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121028 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121028 Year of fee payment: 7 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131028 Year of fee payment: 8 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |