JP4018705B2 - シェーディング補正装置及び補正方法並びに撮像装置 - Google Patents
シェーディング補正装置及び補正方法並びに撮像装置 Download PDFInfo
- Publication number
- JP4018705B2 JP4018705B2 JP2005120009A JP2005120009A JP4018705B2 JP 4018705 B2 JP4018705 B2 JP 4018705B2 JP 2005120009 A JP2005120009 A JP 2005120009A JP 2005120009 A JP2005120009 A JP 2005120009A JP 4018705 B2 JP4018705 B2 JP 4018705B2
- Authority
- JP
- Japan
- Prior art keywords
- shading correction
- zoom
- image
- zoom position
- correction value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
- H04N23/81—Camera processing pipelines; Components thereof for suppressing or minimising disturbance in the image signal generation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/69—Control of means for changing angle of the field of view, e.g. optical zoom objectives or electronic zooming
Description
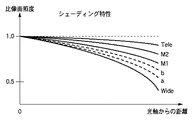
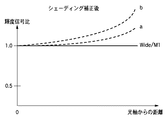
画像入力装置において、ズームレンズ401、絞り402、フォーカスレンズ403を通過した光は、撮像素子405により画素毎の電気信号に変換され、撮像素子駆動回路407により順次読み出された後、A/D回路406にてデジタル信号に変換される。一方、絞り値、ズーム位置、レンズ種類に対応したシェーディング補正データが予めROM1(413)、ROM2(414)及びROM3(415)に登録されており、制御部412は画素位置に応じたアドレス信号をこれらROMに与える。
図1は本発明の実施形態に係るシェーディング補正装置を適用した撮像装置の一例としてのデジタルスチルカメラの構成例を示すブロック図である。
図1のデジタルスチルカメラにおいて、ズーム駆動回路104にて駆動されるズームレンズ101、絞り手段102及びフォーカスレンズ103を通過した被写体の光学像は、撮像素子105により電気信号へと変換される。そして、A/D回路106により撮像素子105が出力する電気信号をデジタル画像データへと変換し、シェーディング補正回路108でズームレンズ101のズーム位置、絞りに応じた補正を行う。
図2はシェーディング補正回路108の構成例を示すブロック図である。また、図3は、シェーディング補正回路108の動作を説明するためのタイミングチャートである。以下、図2及び図3を用いてシェーディング補正処理の詳細について説明する。
図2において、シェーディング補正回路108は112制御部からの信号として(ズーム移動速度(mm/秒),フレームレート(フレーム数/秒),ズームレンズ位置,露光時間T(秒)、および撮像素子駆動回路107より(HD:水平同期信号,VD:垂直同期信号)を取得する。
a=(N−n)/N+0.5*(T/Z_sp)
b=n/N−0.5*(T/Z_sp)
である。尚、本実施形態では、上記Nおよびnは分解能と露光終了時におけるZoomPosition_M1からの位置とするが、NをZoomPosition_M1とZoomPosition_M2の間の距離、nを露光終了時におけるZoomPosition_M1からの距離として置き換えることも可能である。
Sh_table = Sh_M1*{(N−n)/N + 0.5*(T/Z_sp)}+Sh_M2*{ n/N−0.5*(T/Z_sp)} …式1
となる。
Sh_table ≒ Sh_M1*(N−n)/N +Sh_M2* n/N …式2
の形で近似することが可能であることから、(T/Z_sp)を所定値と比較し、所定値より小さな場合には、近似式(式2)によるシェーディング補正を行ない、(T/Z_sp)が所定値より大きな場合には(式1)によって求められるシェーディング補正値による補正を行なうように、図2の補正重み係数算出回路202にて係数を作成することができる。
a=0+0.5*1=0.5
b=1−0.5*1=0.5
である。したがって、ZoomPosition_M1とZoomPosition_M2の間における任意のフレームのシェーディング補正量は、
Sh_table = Sh_M1*0.5+Sh_M2*0.5
である。
これは、露光開始時点でのシェーディング補正値に対する重み付けを増加させる方が、より違和感のない補正結果が得られるからである。
ステップS201で、露光の終了を検出する。露光が終了したら、制御部112からの信号により、ズームレンズの位置(n)及び露出時間(T)を検出する(ステップS203及びS205)。そして、予め設定されている(Z_sp)を用いて(T/Z_sp)を算出し、(T/Z_sp)が所定値を超えた場合には上述の(式1)により、所定値未満の場合には(式2)により重み付け係数a,bを算出する(ステップS207)。
以上の処理を、露光終了毎に行うことで、撮影されるフレーム毎に適切なシェーディング補正を行うことが可能である。
このような更新処理により、シェーディング補正回路108が常に適切な補正値を算出することが可能になる。
第1の実施形態においては、シェーディング補正テーブルを用意する離散的なズーム位置間での位置検出が可能なデジタルスチルカメラにおけるシェーディング補正について説明した。これに対し、第2の実施形態においては、シェーディング補正テーブルを用意する離散的なズーム位置間での位置検出が出来ない場合の、中間位置におけるシェーディング補正値の作成方法について説明する。以下の説明においても、図3の例を用いる。
図7において、シェーディング補正回路108は制御部112からの信号として(ズーム移動速度(mm/秒)、フレームレート(秒/フレーム)、露光時間T(秒)、及びカウンタ707の制御信号を、撮像素子駆動回路107より(HD:水平同期信号,VD:垂直同期信号)をそれぞれ取得する。
a=(Fn−x)/Fn+0.5*(T/Z_sp)
b=x/Fn−0.5*(T/Z_sp)
である。ただし、Tは露光時間(秒)であり、(T/Z_sp)≦1である。
Sh_table = Sh_M1*{(Fn−x)/Fn + 0.5*(T/Z_sp)}+Sh_M2*{ x/Fn−0.5*(T/Z_sp)} …式3
となる。
Sh_table ≒ Sh_M1*(Fn−x)/Fn +Sh_M2* x/Fn …式4
の形で近似することが可能であることから、(T/Z_sp)を所定値と比較し、所定値より小さな場合には、近似式(式4)によるシェーディング補正を行ない、(T/Z_sp)が所定値より大きな場合には(式3)によって求められるシェーディング補正値による補正を行なうように、図7の補正重み係数算出回路702にて係数を作成することができる。
なお、上述した実施形態においては、ズーム位置がZoomPositionに等しい場合は、重み付け係数(a,b)=(1,0)とすることで、RAM1に格納された、予め用意された補正値を用いたシェーディング補正が行われるようにしていた。しかし、ズームレンズ位置がZoomPositionに等しい場合には乗算器206(706)に直接ROM115もしくはRAM1から読み出した補正値を供給するように構成することもできる。
Claims (7)
- ズームレンズを移動しながら撮像された画像のシェーディング補正を行うシェーディング補正装置であって、
前記ズームレンズが取りうるズーム位置のうち、予め定めた複数の離散的なズーム位置でのシェーディング補正値を格納する記憶手段と、
前記撮像された際の前記ズーム位置が前記離散的なズーム位置でない画像に適用するシェーディング補正値を、前記記憶手段に格納されたシェーディング補正値を用いて算出する算出手段と、
前記算出手段が算出したシェーディング補正値を、前記撮像された画像に適用する補正手段とを有し、
前記算出手段は、前記画像が撮像された際の前記ズーム位置を前記画像が撮像された際の前記ズームレンズの移動速度に応じて決定し、当該決定したズーム位置に対するシェーディング補正値の算出を行うことを特徴とするシェーディング補正装置。 - 前記算出手段は、さらに、前記画像が撮像された際の露光時間に応じて決定したズーム位置に対するシェーディング補正値を算出することを特徴とする請求項1記載のシェーディング補正装置。
- 前記算出手段は、前記撮像された際の前記ズーム位置より望遠側と広角側で最も近くに存在する1組の前記離散的なズーム位置に対応するシェーディング補正値を用いて、前記撮像された際の前記ズーム位置が前記離散的なズーム位置でない画像に適用するシェーディング補正値を算出することを特徴とする請求項1または2記載のシェーディング補正装置。
- 前記画像が撮像された際のズーム位置を、前記離散的なズーム位置のうち所定のズーム位置を過ぎた後でズームしながら撮像された画像のフレーム数と、前記所定のズーム位置に隣接する前記離散的なズーム位置間をズームしながら撮像した際のフレーム数とから求めるズーム位置検出手段をさらに有することを特徴とする請求項3に記載のシェーディング補正装置。
- 前記算出手段は、前記撮像された際の前記ズーム位置より望遠側と広角側で最も近くに存在する1組の前記離散的なズーム位置に対応するシェーディング補正値を重み付け加算することにより前記撮像された際の前記ズーム位置が前記離散的なズーム位置でない画像に適用するシェーディング補正値を算出することを特徴とする請求項3又は4に記載のシェーディング補正装置。
- ズームレンズと、前記ズームレンズから入射した被写体像を電気信号に変換する撮像素子と、請求項1乃至5のいずれか1項に記載のシェーディング補正装置とを有し、前記撮像素子の出力信号から生成される画像に対して前記シェーディング補正装置によりシェーディング補正を行うことを特徴とする撮像装置。
- ズームレンズを移動しながら撮像された画像のシェーディング補正を行うシェーディング補正方法であって、
前記ズームレンズが取りうるズーム位置のうち、予め定めた複数の離散的なズーム位置でのシェーディング補正値を記憶手段に格納する記憶工程と、
前記撮像された際の前記ズーム位置が前記離散的なズーム位置でない画像に適用するシェーディング補正値を、前記記憶手段に格納されたシェーディング補正値を用いて算出する算出工程と、
前記算出工程で算出したシェーディング補正値を、前記撮像された画像に適用する補正工程とを有し、
前記算出工程では、前記画像が撮影された際の前記ズーム位置を前記画像が撮像された際の前記ズームレンズの移動速度に応じて決定し、当該決定したズーム位置に対するシェーディング補正値の算出を行うことを特徴とするシェーディング補正方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005120009A JP4018705B2 (ja) | 2005-04-18 | 2005-04-18 | シェーディング補正装置及び補正方法並びに撮像装置 |
| US11/403,412 US7570837B2 (en) | 2005-04-18 | 2006-04-12 | Shading correction apparatus and image sensing |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005120009A JP4018705B2 (ja) | 2005-04-18 | 2005-04-18 | シェーディング補正装置及び補正方法並びに撮像装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2006303709A JP2006303709A (ja) | 2006-11-02 |
| JP2006303709A5 JP2006303709A5 (ja) | 2007-09-06 |
| JP4018705B2 true JP4018705B2 (ja) | 2007-12-05 |
Family
ID=37234063
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005120009A Expired - Fee Related JP4018705B2 (ja) | 2005-04-18 | 2005-04-18 | シェーディング補正装置及び補正方法並びに撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7570837B2 (ja) |
| JP (1) | JP4018705B2 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7834925B2 (en) * | 2006-06-05 | 2010-11-16 | Core Logic Inc. | Lens shading correction device and method in image sensor |
| JP2008085388A (ja) * | 2006-09-25 | 2008-04-10 | Fujifilm Corp | 撮像装置 |
| CN100582932C (zh) * | 2007-04-02 | 2010-01-20 | 鸿富锦精密工业(深圳)有限公司 | 相机模组暗角侦测装置及相机模组暗角侦测方法 |
| JP4861234B2 (ja) * | 2007-04-13 | 2012-01-25 | 株式会社エルモ社 | 露出制御方法及び撮像装置 |
| JP2009049609A (ja) * | 2007-08-16 | 2009-03-05 | Fujitsu Microelectronics Ltd | 補正回路、補正方法及び撮像装置 |
| JP4682181B2 (ja) * | 2007-11-19 | 2011-05-11 | シャープ株式会社 | 撮像装置および電子情報機器 |
| US8130292B2 (en) * | 2008-12-31 | 2012-03-06 | Aptina Imaging Corporation | Scene illumination adaptive lens shading correction for imaging devices |
| JP2011095933A (ja) * | 2009-10-28 | 2011-05-12 | Sony Corp | シェーディング補正方法、シェーディング補正値測定装置、撮像装置及びビームプロファイル測定装置 |
| JP5950492B2 (ja) | 2010-08-05 | 2016-07-13 | キヤノン株式会社 | 制御装置および制御方法 |
| JP6039205B2 (ja) * | 2012-03-21 | 2016-12-07 | キヤノン株式会社 | 撮像装置 |
| JP5646705B1 (ja) * | 2013-07-18 | 2014-12-24 | アキュートロジック株式会社 | 画像処理装置、画像処理方法、及び、画像処理プログラム |
| JP6274787B2 (ja) | 2013-08-27 | 2018-02-07 | オリンパス株式会社 | 撮像装置、撮像システム及び画像処理方法 |
| JP6819629B2 (ja) * | 2018-02-23 | 2021-01-27 | オムロン株式会社 | 画像センサ |
| JP6946245B2 (ja) * | 2018-09-11 | 2021-10-06 | キヤノン株式会社 | レンズ装置、撮像装置、処理装置、およびカメラ装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6080374A (ja) * | 1983-10-11 | 1985-05-08 | Hitachi Denshi Ltd | テレビジヨンカメラ装置の撮像特性補正方法 |
| KR100203239B1 (ko) * | 1995-02-16 | 1999-06-15 | 윤종용 | 화이트쉐이딩 보정방법 및 장치 |
| JP3865943B2 (ja) | 1998-07-23 | 2007-01-10 | 松下電器産業株式会社 | シェーディング補正方法 |
| JP2002057927A (ja) | 2000-08-08 | 2002-02-22 | Canon Inc | 画像補間方法、画像合成方法、撮像システム及び画像処理装置 |
| JP4574022B2 (ja) * | 2001-01-17 | 2010-11-04 | キヤノン株式会社 | 撮像装置及びシェーディング補正方法 |
| JP3824237B2 (ja) * | 2003-09-05 | 2006-09-20 | ソニー株式会社 | 画像処理装置および方法、記録媒体、並びにプログラム |
-
2005
- 2005-04-18 JP JP2005120009A patent/JP4018705B2/ja not_active Expired - Fee Related
-
2006
- 2006-04-12 US US11/403,412 patent/US7570837B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US7570837B2 (en) | 2009-08-04 |
| JP2006303709A (ja) | 2006-11-02 |
| US20060244848A1 (en) | 2006-11-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4018705B2 (ja) | シェーディング補正装置及び補正方法並びに撮像装置 | |
| US7856174B2 (en) | Apparatus and method for image pickup | |
| TWI360349B (en) | Digital imaging apparatus with camera shake compen | |
| JP6506517B2 (ja) | 画像処理装置及びその制御方法、及び撮像装置 | |
| JP5237721B2 (ja) | 撮像装置 | |
| JP7086571B2 (ja) | 撮像装置、レンズ装置およびこれらの制御方法 | |
| JP6910765B2 (ja) | 制御装置、防振制御方法および防振制御プログラム | |
| JP2009284394A (ja) | 撮像装置および撮像方法 | |
| JP2011040902A (ja) | 撮像装置及び撮像装置用制御装置 | |
| US10554891B2 (en) | Image stabilization apparatus, image stabilization method, image capturing apparatus, image capturing system and non-transitory storage medium | |
| JP5197801B2 (ja) | 動画再生システム及び撮影装置 | |
| JP6584098B2 (ja) | 撮像装置及びその制御方法 | |
| JP2014131190A (ja) | 撮像装置、その制御方法、および制御プログラム | |
| JP2009284101A (ja) | 撮像装置及びその制御方法 | |
| JP2008118389A (ja) | 撮像装置、画像処理装置、及び画像処理方法 | |
| JP2013121173A (ja) | 撮像装置 | |
| US11153516B2 (en) | Image capture apparatus and control method therefor | |
| JP4748270B2 (ja) | 画像処理装置および画像処理プログラム | |
| JP2015233211A (ja) | 撮像装置およびその制御方法ならびにプログラム | |
| JP5321108B2 (ja) | カメラ、レンズ収差補正プログラム、およびレンズ収差補正プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP4827610B2 (ja) | 像振れ補正装置およびその制御方法、並びに撮像装置 | |
| JP2010204303A (ja) | 撮像装置 | |
| JP2007025129A (ja) | 露出設定方法及び装置 | |
| JP4613827B2 (ja) | 撮影装置、その制御方法及び制御プログラム | |
| JP2007235806A (ja) | 画像処理装置、撮影装置、画像処理方法、および、制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070720 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070720 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20070720 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20070720 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20070814 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070920 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100928 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100928 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110928 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110928 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120928 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120928 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130928 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |