CN1126866C - 内燃机的起动装置 - Google Patents
内燃机的起动装置 Download PDFInfo
- Publication number
- CN1126866C CN1126866C CN99804328A CN99804328A CN1126866C CN 1126866 C CN1126866 C CN 1126866C CN 99804328 A CN99804328 A CN 99804328A CN 99804328 A CN99804328 A CN 99804328A CN 1126866 C CN1126866 C CN 1126866C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- motor
- time
- starting
- stroke
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N11/00—Starting of engines by means of electric motors
- F02N11/08—Circuits or control means specially adapted for starting of engines
- F02N11/0859—Circuits or control means specially adapted for starting of engines specially adapted to the type of the starter motor or integrated into it
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N19/00—Starting aids for combustion engines, not otherwise provided for
- F02N19/005—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2400/00—Control systems adapted for specific engine types; Special features of engine control systems not otherwise provided for; Power supply, connectors or cabling for engine control systems
- F02D2400/02—Four-stroke combustion engines with electronic control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2400/00—Control systems adapted for specific engine types; Special features of engine control systems not otherwise provided for; Power supply, connectors or cabling for engine control systems
- F02D2400/04—Two-stroke combustion engines with electronic control
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/0097—Electrical control of supply of combustible mixture or its constituents using means for generating speed signals
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N19/00—Starting aids for combustion engines, not otherwise provided for
- F02N19/005—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation
- F02N2019/007—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation using inertial reverse rotation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N19/00—Starting aids for combustion engines, not otherwise provided for
- F02N19/005—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation
- F02N2019/008—Aiding engine start by starting from a predetermined position, e.g. pre-positioning or reverse rotation the engine being stopped in a particular position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02N—STARTING OF COMBUSTION ENGINES; STARTING AIDS FOR SUCH ENGINES, NOT OTHERWISE PROVIDED FOR
- F02N5/00—Starting apparatus having mechanical power storage
- F02N5/04—Starting apparatus having mechanical power storage of inertia type
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
- Coupling Device And Connection With Printed Circuit (AREA)
Abstract
在起动发动机时,使起动电动机逆转,使曲轴逆转,使活塞暂时返回排气冲程内。其后,使起动电动机正转,从活塞处于排气冲程内的状态使发动机起动。起动电动机以逆转通电时间t1被逆转后,在停止通电时间t2期间曲轴惯性旋转,使活塞位于排气冲程。逆转通电时间t1和停止通电时间t2由逆转通电时间表格和停止通电时间表格设定,从起动电动机的换向位置脉冲信号算出电动机的旋转速度和速度变化率、旋转角度,根据它们进行适当的反馈控制。由此,在排气冲程和吸气冲程中在曲轴的旋转系统上积蓄正转方向的惯性能量,由该惯性能量和起动电动机的旋转能量越过活塞的压缩冲程,可以使起动电动机小型化、低价格化。
Description
技术领域
本发明涉及起动适用于机动二轮车或汽车等的内燃机的内燃机的起动装置及用于控制该起动装置的内燃机的起动控制装置。
背景技术
在起动发动机(内燃机)时,为了产生燃料的吸入、压缩及爆发,必须由外力使曲轴旋转直到保持所需要的旋转速度,为了使发动机起动,使用了以电池作为驱动源的起动装置即起动机。
作为原来的起动机有通过减速机构将马达的旋转传递给曲轴的类型和将马达直接连接在曲轴上的类型。通过减速机构使曲轴旋转的类型的起动机,小齿轮与设在发动机的飞轮外周上的齿圈啮合,小齿轮沿电动机轴前后运动,在起动时,小齿轮与齿圈啮合进行减速地将旋转力传递于曲轴,在起动结束后,脱开啮合而回到原始位置。
通常,在使发动机停止时,曲轴惯性旋转后,发动机的压缩冲程中的压缩负荷作为制动作用于曲轴上而使旋转轴暂时停止,其后稍微逆向返回,发动机大都在活塞的压缩冲程的下止点附近停止。因此,在使发动机起动时,大都从压缩冲程的下止点附近的位置开始曲轴的旋转。
但是,在为了从该位置使曲轴旋转进行起动而转动动力输出轴时,因为从旋转开始后紧接着压缩负荷就施加在曲轴上,曲轴的旋转速度难以上升,在压缩时的反作用力成为最大的位置,在起动电动机上流过与起动时相近的电流。因此,这时产生的扭矩是以几乎与起动扭矩相同的扭矩越过上止点,因而,起动电动机必须选用具有可以产生上述越过上止点的扭矩的特性的起动电动机。
特别是在将没有减速机构而直接与曲轴连接的类型的电动机作为起动电动机时,更需要产生大的起动扭矩,因而,必须使用大型的昂贵的电动机。再有,在将磁铁使用于磁场时,需要强的磁场,铁损所引起的内燃机的旋转阻抗变大,招致燃料费的上升及发动机的输出功率降低。
本发明的目的是使起动发动机的起动电动机小型化。
本发明的又一目的是使起动电动机以少的电力消耗起动电动机。
本发明的另一目的是谋求控制起动发动机的起动电动机的起动控制装置的成本降低。
本发明的上述及其他的目的和新颖的特征可从本说明书的记载及附图中得知。
发明的公开
本发明的内燃机的起动装置的特征是,它包括起动电动机和控制装置,该起动电动机与将排气行程作为起动开始位置的内燃机的曲轴相连接,并具有比该内燃机的最大旋转负荷小的输出转矩,该控制装置用于由上述曲轴的旋转惯性能量及上述起动电动机的旋转能量的合力越过压缩行程,由此,可以由惯性能量和起动电动机的旋转能量的合成能量来越过压缩行程。另外,在内燃机经过排气冲程和吸气冲程期间,曲轴的转速上升,在曲轴的旋转系统上积蓄正转方向的惯性能量。因此,可以降低用于越过初次的压缩冲程的起动电动机的旋转能量,可以实现起动电动机的小型化、低价格化。
另外,借助上述控制装置,通过使上述起动电动机逆转而返回到排气冲程,即使活塞在排气冲程以外的位置停止了的情况下,也可以在使活塞位于排气冲程内的状态下使内燃机起动。
另外,本发明内燃机的起动装置的特征是,它包括:起动发电机,该起动发电机与内燃机的曲轴连接;控制装置,它使上述起动发电机仅以规定的通电时间(逆转通电时间)逆转而驱动上述曲轴逆转后,通过使上述曲轴以规定的停止通电时间惯性旋转而使上述内燃机的活塞位于排气冲程,其后使上述起动发电机正转而使上述内燃机起动。
由此,在不特设凸轮轴传感器等的检测活塞位置的传感器的情况下就可以在使活塞位于排气冲程内的状态下使内燃机起动,可以提供省去了传感器的廉价的内燃机起动系统。
另外,通过在上述起动装置上再设置存储了逆转通电时间表格(MAP)及停止通电时间表格的存储装置,进行对应于逆转通电时间或停止通电时间的温度补偿或电压变动补偿,即使环境变化也可以稳定地将活塞返回排气冲程。上述逆转通电时间表格是将温度和电源电压的至少一方作为参数设定上述逆转通电时间,上述停止通电时间表格是将温度作为参数设定上述停止通电时间。
另外,也可以在上述控制装置上设置从温度和电源电压算出上述逆转通电时间的逆转通电时间算出装置和从温度算出上述停止通电时间的停止通电时间算出装置。
另一方面,本发明的内燃机的起动控制装置的特征是,它包括:电动机旋转速度算出装置,它根据伴随与内燃机的曲轴相连接的起动电动机的旋转而输出的旋转脉冲信号算出上述起动电动机的旋转速度;电动机旋转角度算出装置,它根据上述旋转脉冲信号算出上述起动电动机的旋转角度;电动机逆转通电指示装置,它使上述起动电动机以规定的通电时间逆转;逆转量补正装置,它根据上述起动电动机的旋转速度补正上述曲轴的逆转通电时间;电动机停止通电指示装置,它在逆转驱动上述曲轴后以规定的停止通电时间停止对上述起动电动机通电,使上述曲轴惯性旋转,使上述内燃机的活塞位于排气冲程;惯性旋转量补正装置,它根据上述起动电动机的旋转速度及旋转角度补正上述曲轴的惯性旋转量;电动机正转开始指示装置,它在上述停止通电时间结束后,从上述活塞位于排气冲程的状态使上述起动电动机正转,使上述内燃机起动。
由此,可以根据起动电动机的旋转速度和旋转角度适当地反馈逆转通电时间和停止通电时间,可在不特设凸轮轴传感器等的活塞位置检测传感器的情况下,在使活塞处于排气冲程内的状态下使内燃机起动,可提供省去了传感器的廉价的内燃机起动系统。
这种情况下,上述逆转量补正装置,也可以将从上述起动电动机的旋转速度算出的旋转速度变化率与预定的基准值比较,在上述变化率为上述基准值以下时,提高上述起动电动机的目标旋回速度而增加上述曲轴的惯性能量,在上述变化率超过了上述基准值时,降低上述起动电动机的目标旋转速度,使上述曲轴的惯性能量减少。
另外,上述逆转量补正装置也可以在上述起动电动机的旋转速度达到了目标旋转速度时,即使在上述逆转通电时间也停止对上述起动电动机的通电,在上述起动电动机的旋转速度在上述逆转通电时间内未达到目标旋转速度时,延长上述逆转通电时间,继续对上述起动电动机通电。
再有,上述逆转量补正装置也可以在上述起动电动机的旋转速度在上述逆转通电时间内成为规定下限值以下时,即使在上述逆转通电时间内也可以停止对上述起动电动机的通电。
而且,上述惯性旋转量补正装置,也可以在上述起动电动机的通电时间的旋转角度超过了规定的逆转基准角度(例如180度)时,即使在上述停止通电时间内也使上述停止通电时间结束,由上述电动机正转开始装置使上述起动电动机正转,在旋转角度为上述逆转基准角度以下时在上述起动电动机的旋转度为规定值(例如0)时,即使为上述停止通电时间内,也使上述停止通电时间暂时终止,由上述电动机逆转通电装置再度使上述起动电动机逆转。
再有,上述惯性旋转量补正装置也可以在从上述起动电动机算出的旋转速度的转速的降低率越过了规定上限值时,即使在上述停止通电时间内,也使上述停止通电时间终止,由上述电动机正转开始装置使上述起动电动机正转。
另外,本发明的内燃机的起动装置的特征是,它包括:与内燃机的曲轴连接的起动电动机;输出上述起动电动机的换向位置脉冲信号的换向位置检测装置;以下述方式控制上述起动电动机的控制装置,该方式为通过使上述起动电动机逆转到活塞的爆发冲程内压缩燃烧室内的气体,积蓄由其压缩反动产生的正转能量,在该能量上附加由上述起动电动机产生的旋转能量而在上述曲轴周围的旋转系统上积蓄惯性能量,从而越过压缩冲程,上述控制装置,在使上述起动电动机逆转时,根据由上述换向位置检测装置输出的脉冲信号的脉冲间隔的变化检测上述曲轴的旋转方向。
在这种情况下,上述控制装置也可以在由上述换向位置检测装置输出的脉冲信号的脉冲间隔比规定值长时,判定为活塞到达了爆发冲程。
再者,本发明的内燃机的起动装置的特征是,它包括:起动电动机,它与内燃机的曲轴相连接;曲轴角度传感器,它检测上述曲轴的角度;控制装置,它以以下的方式控制上述起动电动机,该方式为:通过将上述起动电动机逆转到活塞的爆发冲程内压缩燃烧室内的气体,积蓄其压缩反动带来的正转能量,在该能量上附加上述起动电动机的旋转能量,从而在上述曲轴周围的旋转系统上积蓄惯性能量,由此越过压缩冲程。上述控制装置,在使上述起动电动机逆转时,根据由上述曲轴角度检测出的曲轴角度检测上述活塞到达了爆发冲程的情况。
这时,上述控制装置也可以根据由上述曲轴角度检测出的曲轴角度决定上述曲轴的正转通电开始。
另外,本发明的内燃机起动装置的特征是,它包括:与内燃机的曲轴连接的起动电动机;检测上述内燃机的凸轮位置的凸轮轴传感器;控制装置,它以如下方式控制上述起动电动机,该方式为:通过使上述起动电动机逆转到活塞的爆发行程内压缩燃烧室内的气体,积蓄其压缩反动带来的正转能量,在该能量上附加上述起电动机的旋转能量,在上述曲轴的周围的旋转系统上积蓄惯性能量,由此越过压缩冲程。上述控制装置,在使上述起动电动机逆转时,根据来自上述凸轮轴传感器的信号检测上述活塞到达了爆发冲程的情况。
这时,上述控制装置也可以根据由上述凸轮传感器检测出的曲轴角度决定上述曲轴的正转通电开始。
并且,在上述内燃机的起动装置中,上述控制装置也可以在停止对上述起动电动机逆转通电后,使上述曲轴规定时间惯性旋转后进行正转通电。另外,上述控制装置也可以在检测出了上曲轴的旋转方向由爆发冲程的压缩反作用力转换为正转时,开始正转通电。再者,在将上述起动电动机逆转到活塞的爆发冲程内前也可以使其正转到压缩冲程内。
对于本发明,由于通过由起动电动机使活塞从其停止的位置逆转到爆发冲程来压缩燃烧室的气体,积蓄其压缩反动带来的正转的能量,通过在该能量上附加起动电动机的旋转能量使曲轴正转,从而可以用小转矩的起动电动机、以少的电力消耗使内燃机起动。
另外,对于本发明,由于在使曲轴起动前,首先使其逆转到压缩冲程的中途,压缩燃烧室内的气体,在积蓄了其压缩反动带来的逆转的能量后,使用其能量使曲轴逆旋转,由此,在使曲轴逆旋转到爆发冲程时,在旋转系统上积蓄惯性能量,可以充分地积蓄其后的爆发行程中的再逆转时的燃烧室的气体的压缩所带来的正旋转的能量。可以提高使曲轴正旋转越过压缩行程时的惯性能量。因此,可以在二冲程发动机那样地即使在爆发冲程和压缩冲程间没有长的冲程的情况下也可以确实地使内燃机起动。
另外,本发明的内燃机的起动装置的特征是,在由曲轴的旋转惯性能量和起动电动机的旋转能量的合力渡过压缩冲程的内燃机中,上述起动电动机与上述内燃机的曲轴相连接,并且其特性可以根据旋转速度转换。
本发明,在使活塞比压缩冲程更返回地使起动电动机逆转后,使起动电动机正转进入压缩冲程时,借助电动机特性的转换,增大起动扭矩,可以提高旋转上升率。在高到规定的旋转速度后可以提高最大旋转速度,可以将惯性能量高效地施加于旋转系统上。
附图的简单说明
图1是表示本发明的实施例1的发动机的起动电动机的构造的剖面图。
图2是图1的起动电动机的省略了壳体和盖的正视图。
图3是表示图1的起动电动机的控制系统的构成的框图。
图4是表示图1的起动电动机进行的4冲程发动机的起动动作的曲线图;(a)表示各种冲程中的旋转负荷;(b)表示起动能量;(c)表示起动动作时的活塞位置;(d)表示凸轮轴传感器信号。
图5是表示将本发明的起动电动机使用于2冲程发动机时的起动动作的曲线图;(a)表示各冲程中的旋转负荷;(b)表示起动能量;(c)表示起动动作时的活塞位置;(d)表示凸轮轴传感器信号。
图6是表示实施例2的起动电动机的控制系统的构成的框图。
图7是表示实施例2的起动电动机进行的4冲程发动机的起动动作的曲线图;(a)表示各冲程的旋转负荷;(b)表示起动能量;(c)表示来自换向位置检测传感器的脉冲信号;(d)表示起动动作时的活塞位置。
图8是表示逆转通电时间表格的一例的说明图。
图9是表示停止通电时间表格的一例的说明图。
图10表示将本发明的起动电动机使用于2冲程发动机的起动动作的曲线图;(a)表各冲程中的旋转负荷;(b)表起动能量;(c)表示起动动作时的活塞位置;(d)表示凸轮轴传感器信号。
图11是表示实施例3的起动电动机的控制系统的构成的框图。
图12是本发明的发动机起动控制装置的功能框图。
图13是表示实施例3的起动电动机进行的4冲程发动机的起动动作的曲线图,(a)表示各冲程中的旋转负荷;(b)表示起动能量;(c)表示来自换向位置检测传感器的脉冲信号;(d)表示起动动作时的活塞位置。
图14是表示将使用了本发明的发动机起动控制装置的起动电动机使用于2冲程发动机时的起动动作的曲线图;(a)表示各冲程中的旋转负荷;(b)表示起动能量;(c)表示起动动作时的活塞位置;(d)表示凸轮轴传感器信号。
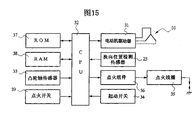
图15是表示本发明的实施例4的起动电动机的控制系统的构成的框图。
图16是表示实施例4的起动电动机的发动机起动动作的曲线图;(a)表示各冲程中的起动负荷;(b)表示起动能量;(c)表示起动动作时的活塞位置;(d)表示来自换向位置检测传感器的脉冲信号;(e)表示凸轮轴信号。
图17是表示实施例4的起动电动机的发动机起动动作的曲线图;(a)表示活塞位置的变化;(b)表示曲轴的转速的变化;(c)表示能量的变化;(d)表示电动机输出能量的变化;(e)表示越过能量的变化。
图18是表示实施例4的起动电动机的发动机起动时的能量积蓄过程的曲线图;(a)表示电动机的产生能量的变化;(b)表示旋转系统的旋转能量的变化。
图19是表示与实施例4相关的一变型例的发动机的起动电动机的起动动作的曲线图。
图20是是图19所示的起动装置中的能量积蓄过程的曲线图;(a)表达电动机的产生能量的变化;(b)表示旋转系统的旋转能量的变化。
图21是表示将本发明的起动装置使用于2气缸的发动机时的曲线图。
图22是表示本发明的实施例5的发动机的起动电动机的构造。
图23是图22的起动电动机的省略了壳体和盖的正视图。
图24是表示图22和图23所示的起动电动机的特性的特性线图。
图25是表示图22和图23所示的起动电动机的特性的切换控制的特性线图。
图26是表示本发明的实施例5的起动装置的控制电路的框图。
图27是表示本发明的实施例5的起动装置的起动电动机的起动动作等的曲线图。
图28是表示与本发明的实施例5相关的一变型的起动装置的起动电动机的控制电路的框图。
图29是表示图28的变型例的起动电动机的起动动作等的曲线图。
图30是表示逆转通电时间的表格的一例的说明图。
图31是表示停止通电时间的表格的一例的说明图。
图32是表示用于进行图29所示的起动动作的其它的控制装置的发动机起动控制部的功能框图。
图33是表示关于实施例5的另一变型例的起动装置中的起动电动机的起动动作等的曲线图。
图34是表示图33所示的起动动作时的压缩反动能量的积蓄状态等的曲线图。
图35是表示关于实施例5的又一变型例的发动机的起动电动机的起动动作的曲线图。
图36是表示图35所示的起动装置的能量的积蓄过程的曲线图。
实施本发明的最佳方式
以下根据附图详细说明本发明的实施例。
(实施例1)
图1是表示本发明的实施例1的发动机的起动电动机的构造的剖面图,图2是图1的起动电动机的省略了壳体及盖的正视图,图3是表示图1的起动电动机的控制系统的构成的框图。
图1的起动电动机(起动电动机,以下简称电动机)10直接连接在机动二轮车的4冲程发动机上,它备有固定在发动机的发动机壳体上的定子12、与发动机的曲轴13相连接的转子14。
转子14具有使用铁等的磁性材料形成为有底的短圆筒形状的轭15。在该轭15的底壁的内面上同心状地一体地突设着圆筒状的毂部16。该毂部16和曲轴13各自的锥面彼此楔作用地结合,由装配螺母17固接,由此,该转子14与曲轴13一体地旋转地固定着。在轭15的内周面上沿周向固定多个构成磁场子磁极的永久磁铁18,这些相邻的永久磁铁18磁极相异地被安装着。
电动机10的定子12具有芯19,该芯19是用铁等的磁性材料形成为大致星形的薄的圆盘形状。芯19由作为紧固手段的螺栓21紧固在外壳20上,该外壳20与曲轴13同心地配设地安装在发动机壳体11的外面上。另外,在壳体20的外侧安装着盖26。在壳体20内的定子12的外侧围绕着其外周地配设着转子14,转子14由曲轴13驱动而绕着定子12的周围旋转。
芯19具有本体22,该本体22形成为环形,它是多片地层积由铁制的磁性材料构成的薄板而一体化。在芯本体22的外周上放射状地突设着多根突极23。在各突极23上三相接线绕组地分别绕着定子线圈24,该定子线圈24通过图中未示的接线端子由引出线和电线束(都未图示)与电动机驱动器31相连接。即,该电动机10作为由电动机驱动器31驱动的无刷电动机构成着。
另外,在电动机10中,多个(例如3个)换向位置检测传感器25配设在壳体20内,感应永久磁铁18的磁而检测转子14的旋转位置。换向位置检测传感器25的输出通过CPU32供给电动机驱动器31,电动机驱动器31根据CPU32的指令生成对应于来自换向位置检测传感器25的检测信号的通电信号,向定子线圈24供给基于上述通电信号的电流而依次地励磁定子线圈24。在定子线圈24被顺次励磁时,由定子线圈24形成旋转磁场。该旋转磁场作用于永久磁铁18,由该旋转磁场旋转转子14,转子14的旋转力通过毂部16传递给曲轴13,起动发动机。
另外,该电动机10如图3所示地被CPU(控制装置)32控制并由电动机驱动器31驱动。在该CPU32上连接着检测发动机的动阀凸轮的动作的凸轮轴传感器33和发动机的起动开关34以及点火开关39。另外在CPU32上通过点火组件36连接着发动机点火用的点火线圈35,还连接着存储着关于电动机驱动逻辑和发动机控制等的各种控制程序的ROM37及存储来自各种传感器类的数据等的RAM38。而且,根据各种传感器的检测值向电动机驱动器31和点火组件36等送出控制信号,进行电动机10或发动机点火控制等。电动机10自身和CPU32等以车载的图中未示的电池作为电源而被驱动。
以下对该电动机10的发动机起动动作进行说明。图4是以与发动机的各冲程的关系表示电动机10的发动机起动动作的曲线图,(a)表示各冲程中的起动负荷;(b)表示由马达10的驱动力和曲轴13的惯性供给的起动能量;(c)表示起动动作时的活塞位置;(d)表示来自凸轮轴传感器的信号。
如图4(a)所示,用于使曲轴13旋转的负荷由于发动机的动作行程进行变化。即,因为在排气冲程和吸气冲程中,在阀打开的状态下活塞上下运动,所以用于转动曲轴13的负荷比较小。与此相反,在压缩冲程中,由于是在阀关闭了的状态下使活塞上升。所以,曲轴13的动作负荷变大,其值在上止点的稍跟前处成为最大。因此,如前所述,在发动机停止时,通常,在压缩行程前的位置活塞停止,在原来的起动电动机中,从该位置起动发动机。因此,原来的起动电动机,在起动发动机时,为了克服该压缩冲程中的负荷,需要对曲轴供给图4中用虚线表示的能量。
与此相对,在本发明电动机10中,在起动发动机时,首先使电动机10逆旋回而将处于压缩冲程前的活塞暂时返回到排气行程,从其处起动发动机。由此,以在旋转负荷少的区间助跑的形式进入压缩冲程,以发动机的飞轮等产生的旋转系统的惯性能量和电动机驱动转矩的合力克服最大负荷,通过减轻电动机的负荷实现电动机的小型化、低耗电化。
在此,当点火开关39ON时,CPU32首先根据凸轮轴传感器33的检测信号确认现在活塞所处的位置,判定是否需要使活塞返回排气冲程。即,CPU32通过使用凸轮轴传感器33的信号实施活塞位置的确认和活塞向排气冲程的确实的移动。
在活塞处于排气冲程以外的冲程时,CPU32进行将活塞返回排气行程的决定,向电动机驱动器31发出指令,使电动机10暂时逆转,将曲轴13转到排气冲程侧。即,在点火开关ON阶段,例如活塞处于图4(c)的位置P时,将其用箭头所示地移动到排气冲程。这时,在该发动机中,活塞的位置经常地由凸轮轴传感器33监视着,凸轮轴传感器33在活塞来到排气冲程时,输出H信号。而且,当由来自该凸轮轴传感器33的检测信号(H)检知活塞来到了排气冲程时,CPU32停止电动机10的逆转动作,活塞被暂时停止在位置Q。
这时,活塞虽然返回到图4(c)中称为“正转开始范围”的排气冲程的位置Q,但,因为排气行程开始前的下止点附近位置的助跑区间最长,希望返回到其位置。但是位置Q作为开始正转的排气冲程内的位置包括排气冲程前后的爆发冲程的下止点附近和吸气冲程的上止点附近。
在由凸轮轴传感器3检测到在起动动作开始时刻活塞已经处于排气冲程的位置R时,CPU32进行不需要使活塞返回排气冲程的决定,不进行上述的逆转动作。
在此,在使点火开关39ON了时,进行电动机10的逆转动作,但,在使起动开关34ON了时,电动机10立即进入正转动作,从而使在发动机起动上不产生时间滞后。因此,不一定必须在点火开关ON时使电动机10逆转,也可以起动开关34ON了时开始逆转动作。另外,也可以在发动机停止时使电动机逆转。
接着,在由起动开关34输入发动机起动信号时,CPU32对电动机驱动器31输出使电动机10正转的信号,从排气冲程起动发动机。这时,曲轴13由于在排气冲程和吸气冲程中以低负荷进行旋转,因此,电动机10在活塞进入压缩冲程前达到与无负荷转速相近的几乎最大的转速,成为近于饱和状态的转速。因此,曲轴13也在压缩冲程跟前由电动机10驱动为以可能的最大转速旋转着,积蓄于其旋转系统上的惯性量的惯性能量也成为最大的状态地突入压缩冲程。
因此,曲轴13在压缩冲程中如图4(b)所示地由惯性能量(点划线)和电动机能量(实线)的和的合成能量(粗实线)旋转。即,曲轴13由伴随着其转速的降低而放出的惯性能量带来的转矩Ti和由马达的驱动转矩Tm驱动,作为它们的和的超越转矩T=Tm+Ti克服初次的压缩冲程负荷。
这时,在应用了本发明的电动机的发动机中,如图4(b)所示,由于使Tm≤Ti,电动机驱动转矩Tm≤T/2。即,将惯性能量为主、电动机能量为副的进行压缩冲程负荷的克服,从而可以用克服越过力矩T的1/2以下的最大扭矩(lock torquer)的电动机10起动发动机。另外,如图4(b)所示,电动机10将其驱动能量分为助跑时和越过时二次地给予曲轴13。因此,与由1次能量的赋予进行克服压缩冲程负荷的原来的电动机相比,可以用小输出功率的电动机产生大的越过扭矩。
另外,在发动机起动失败了时,直到其之后紧接着的再起动时的排气冲程前的逆转动作只要点火开关39为ON,在检测到发动机旋转停止时就马上自动地进行。因此,在起动开关34再度ON时,电动机10立即进入正转动作,不产生时间滞后。另外,电动机10的动作仅在检测出了制动动作或齿轮位置处于中立位置的任何一种、或检测到了双方都存在时才被许可,是为了防止车辆的冲出。
这样,在越过了初次的压缩行程后,积蓄惯性能量,可以容易地克服其后的压缩冲程中的负荷。而且,通过用规定的时间由点火开关35飞出电火花,使发动机起动。
以上,说明了将本发明应用到四冲程发动机上的例子,但,也可以将本发明应用于2冲程发动机上,图5是表示2冲程发动机中的动作的曲线图。2冲程发动机与4冲程发动机不同,它在1转中进行吸气·压缩·爆发·排气的冲程。在2冲程发动机中,不存在4冲程发动机中的吸气阀和排气阀,但活塞自身起着阀的作用。
如图5所示,在2冲程发动机中,在压缩冲程和爆冲程中由活塞堵塞气缸的吸气孔和排气孔。另外,排气冲程和吸气冲程同时进行。即,活塞在与下止点接近的位置,排气孔和吸气孔两方成为开放了的状态。这时,相当于4冲程发动机的排气冲程的是在发动机动作(正转)时从排气孔或吸气孔的至少任何一方敞开后到活塞到达下止点之间。
因此,从图4、5可知,除了上述不同点之外,通过在2冲程发动机中也进行与4冲程发动机相同的动作,也可以获得上述同样的效果。
这样,在本发明的电动机10中,在起动发动机之前先暂时使活塞返回到排气冲程,通过从其处起动发动机,利用曲轴13所持有的惯性能量,可由比以前小的电动机转矩越过初次的压缩冲程。因此,可使电动机小型化和低成本化,也可降低电动机的电耗。另外,在将磁铁使于磁场的起动电动机中,由于不需要过度地加强磁铁的磁力,所以,可以降低旋转阻抗,可以实现防止耗油率的提高和发动机输出的降低。
(实施例2)
以下,对实施例2的发动机的起动电动机进行说明。由于起动电动机自身的构成与实施例1的相同,省略其详细说明。
图6是表示该实施例2中的起动电动机的控制系统的构成的框图。如图6所示,该电动机10由被CPU32(控制装置)控制的电动机驱动器31驱动。该CPU32上连接着电动机温度传感器42和换向位置检测传感器25、电池电压传感器43等的传感器类、以及发动机的起动开关34和点火开关39等的开关类。另外,在CPU32上通过点火组件36连接着发动机点火用的点火线圈35。还连接有存储着电动机驱动器驱动逻辑和后述的各种图表、关于发动机控制的各种控制程序等的ROM(存储装置)37和存储着来自各种传感器的数据等的RAM38,而且,根据各种传感器类的检测值向电动机驱动器31和点火组件36等送出控制信号,进行电动机10和发动机点火控制等。另外,电动机10其自身和CPU32等以车载的图中未示的电池作为电源而被驱动。
下面说明该起动电动机10的是起动动作。图7是用与发动机的各冲程的关系表示电动机10的发动机起动动作的曲线图;(a)表示各冲程中的起动负荷;(b)表示由电动机10的驱动力和曲轴13的惯性供给的起动能量;(c)表示来自换向位置检测传感器25的脉冲信号;(d)表示起动动作时的活塞位置。
如图7(a)所示,用于使曲轴13转动的负荷由于发动机的动作冲程而变化。即,在排气冲程和吸气冲程中,在阀打开的状态下活塞进行上下运动,所以,使曲轴13的动作的负荷小。与此相反,在压缩冲程中,活塞在阀关闭的状态下进行上升,所以,曲轴13的动作负荷大,其值在上止点的稍跟前处成为最大。因此,如上所述,在发动机停止时,通常活塞停止在压缩冲程前的位置,在原来的起动电动机中,从该位置使发动机起动。因此,在原来的发动机中,在起动发动机时,为了克服该压缩冲程中的负荷,需要对曲轴供给图7中用虚线所示的能量。
与此相对,本发明的电动机10,在发动机起动时,首先沿使曲轴13沿逆转的方向规定时间或规定角度地驱动曲轴在使活塞暂时移动到排气冲程后使发动机起动。这时,由该电动机10可以在不由凸轮传感器等的传感器类检知活塞的位置的情况下,适应地控制电动机10的逆转通电时间和其后的停止通电时间,由此,实现活塞向排气冲程的移动。这样,以在旋转负荷少的区间助跑的形式进入压缩行程,由发动机的飞轮等所产生的旋转系统的惯性能量和电动机驱动转矩的合力克服最大负荷,实现了减轻电动机的负荷使电动机小型化、低耗电化,并且,由于省去了传感器类,实现费用的降低。
在此,在点火开关39ON的状态下起动开关34ON时,CPU32首先向电动机驱动器发出指令,只以规定时间对电动机10逆转通电,使曲轴13旋转到排气冲程侧。另外,在该逆转通电后,终止规定时间通电,使曲轴13惯性旋转。在规定的通电休止时间后,对电动机10进行正转通电,使曲轴13正转,使发动机起动。
另外,在此,在使起动开关34ON了时,进行电动机10的逆转动作,但,在点火开关39ON了时,通过使电动机10进行逆转动作,在将起动开关34ON了时,电动机10马上进入正转动作,也可以在发动机上不产生时间滞后。因此,也可以不一定需要用起动开关34的ON使起动电动机10逆转,而是在将点火开关39 ON了时开始逆转动作。另外,也可以在发动机停止时使电动机10逆转。
在此,上述的起动动作,根据活塞的停止位置表示为如下的3种形态。即,表示对应于活塞位于压缩冲程前的通常的停止位置的情况(形态①)、位于排气冲程和吸入行程之间的上止点前后的情况(形态②)、位于排气冲程前的下止点附近的情况(形态③)的不同的动作。
因此,前先对上述的形态①中的起动动作进行说明。在起动开关34ON时,由CPU32的指令,使电动机10逆转t1时间,曲轴13旋转到排气行程侧,活塞从位置A移动位置B。其后向电动机10的停止通电t2时间,这时,曲轴13由首先的t1时间的通电获得的惯性力继续逆转。从吸气冲程到排气冲程之间,由于没有由活塞带来的压缩所以负荷力矩小,曲轴13进行惯性旋转。而且,由负荷力矩消耗惯性能量,旋转速度渐渐地降低,终于停止在位置C。
这时,首先的逆转通电时间t1设定为可以借助由通电得到的惯性力活塞由于惯性返回到排气冲程前的下止点附近的时间以上的值。另外,在逆转通电时间t1过长时,曲轴13的旋转速度13的旋转速度过高,有惯性能量大,在停止通电时间t2中超过爆发冲程的危险。因此,逆转通电时间t1设定为在活塞处于压缩冲程前的下止点时,即使使曲轴13逆转,在惯性旋转中也不越过爆发冲程的时间以下。即,根据该条件决定逆转通电时间t1的最小值·最大值。
另外,在停止通电时间t2后,电动机10被正转通电,但,若停止通电时间t2后过短,会产生在惯性旋转中活塞不返回排气冲程的情况。因此,在此决定停止通电时间t2的最小值,也符合上述的逆转通电时间t1,借助这些条件设定,活塞在停止通电时间t2期间从位置B移动到排气冲程中的位置C。
另外,这时,活塞返回到图7(d)中称为“正转开始范围”的排气冲程的位置C,但由于排气冲程开始前的下止点附近位置助跑时间最长,所以最好返回到其位置。但是,位置C作为开始正转的“排气冲程内”的位置也包括排气冲程前后中的爆发冲程的下止点附近的吸气冲程的上止点附近。
在停止通电时间t2终止了时,CPU32向电动机驱动器31输出使电动机10正转的信号,使发动机从排气冲程起动,这时,由于曲轴13在排气冲程和吸气冲程中以低负荷进行旋转,因此,电动机10在活塞进入压缩冲程前,达到与无负荷转速相近的几乎最大的转速,成为接近于饱和状态的转速。因此,曲轴13也在压缩冲程紧前方被电动机10以可能的最大的转速转动,积蓄于其旋转系统的惯性团体上的惯性能量也成为最大的状态而突入压缩冲程。
因此,曲轴13在压缩冲程中,如图7(b)所示地由惯性能量(点划线)和电动机能量(实线)的和的合成能量(粗实线)旋转。即,曲轴13由伴随着其转速的降低而释放出的惯性能量而产生的转矩Ti和电动机驱动转矩Tm驱动,由作为它们的和的越过转矩T=Tm+Ti克服初次的压缩行程负荷。
这时,在应用了本发明的电动机的发动机中,通过如图7(b)所示地使Tm≤Ti。电动机驱动转矩Tm≤T/2。即,以惯性能量为主、电动机能量为辅地进行压缩冲程负荷的克服,用越过转矩T的1/2以下的最大转矩(起动扭矩)的电动机10就可以起动发动机。另外,如图7(b)所示,电动机10将其驱动能量分为助跑时和越过时2次地供给曲轴13。因此,与由1次能量进行克服压缩冲程负荷的原来的电动机相比,可以用小的输出能量的电动机产生大的越过转矩。
这样地越过了初次的压缩冲程后,积蓄惯性能量;可以容易地克服其后的压缩行程中的负荷。而且,通过以规定的时间由点火线圈35飞出电火花来起动发动机。
以下,对上述的形态②中的起动动作进行说明。在此,活塞处于排气冲程和吸气冲程之间的上止点附近(位置D),从此开始逆转动作。在这种情况下,在逆转通电时间t1的期间移动到位置E,以其后的惯性旋转,活塞返回到排气冲程的下止点进入爆发冲程。但是,在爆发行程中由于产生活塞带来的压缩负荷,所以,旋转负荷转矩变大,惯性能量被该负荷转矩急剧地消耗。旋转速度降低并停止(位置F)。这时,由于活塞压缩的反作用力,曲轴13稍稍向正转方向返回,在下止点附近的位置G停止。
在通电时间t2结束时,发动机的活塞从处于排气冲程的位置G的状态起动。由此,与上述相同,由排气冲程和吸气冲程的助跑所获得的惯性能量带来的转矩Ti和电动机的转矩Tm的和克服初次的压缩冲程负荷。
以下再对上述的形态③的起动动作进行说明。在此,活塞处于排气冲程前的下止点附近(位置H),从此处开始逆转动作。在这时,由于在逆转开始后马上进入爆发冲程,由活塞的压缩产生的旋转负荷力矩在逆转后马上产生。因此,曲轴13的旋转速度不上升,而且,也几乎不产生惯性能量。另外,由于电动机10的转矩设定为小于压缩越过转矩的1/2,所以,不会由逆旋转越过爆发冲程,在活塞的压缩反作力和马达的转矩几乎平衡了时,电动机锁定而停止(位置I)。
在经过逆转通电时间t1时,停止通电,马达转矩消失,曲轴13在停止通电时间t2期间由活塞反作用力沿正转方向正转,并渐渐地增加正转转速,其后,在下止点附近,活塞反作用力消失,其后,旋转的惯性能量由旋转负荷力矩渐渐地消耗,在从排气冲程进入吸气冲程前的位置J停止。而且,与前述同样,曲轴运动从该位置开始。但是,由于在停止通电时间t2期间,活塞也有可能从排气冲程进入吸气冲程,所以,停止通电时间t2需要在活塞由于反作用力进入吸气冲程前结束。即,由此决定停止通电时间t2的最大值。
这样,本发明的电动机10,在起动发动机之前先以由上述的形态①说明的条件设定的逆转通电时间t1使电动机10逆转。另外,以用形态(1)、(3)说明了的条件设定的停止通电时间t2停止通电,使曲轴13惯性旋转。然后,通过使电动机10正转将活塞暂时返回到排气冲程,可使发动机起动。这时,该电动机10借助逆转通电时间t1和停止通电时间t2的设定可将活塞确实地返回排气冲程。因此,在不设凸轮轴传感器等的检测活塞位置的传感器的情况下可以进行从排气冲程起的发动机的起动。省去了传感器,可以实现产品的成本的降低。
另外,由于可以利用曲轴13具有的惯性能量越过初次的压缩冲程,所以,减轻了电动机10的负荷,也可以谋求电动机的小型化和低成本化、低耗电化。另外,即使在磁场中使了磁铁的起动机中,由于也不需要过度地加强磁铁的磁力,所以,可以降低旋转阻抗,可以谋求防止油耗率的提高和发动机输出功率的降低。
另外,在发动机起动失败了的情况下,其后的紧接着的再起动时的到排气冲程的逆转动作,只要起动开关34是ON,在检测到了发动机旋转停止时就立刻被进行,或使起动开关34脱开并检测出了发动机的旋转停止时自动地被进行。因此,电动机10立即进行与上述同样的逆转、正转动作。另外,电动机10的动作仅在检测出了制动作动、或齿轮位置处于中立位置的任何一种情况或两情况都存在时才被许可,谋求防止车辆的冲出。
可是,上述的情况,即使设定逆转通电时间t1和停止通电时间t2,电动机10的动作的逆转量(角度)也由于电池的电压的变动、温度变动所引起的电动机性能变化、温度变动所引起的油的粘性的变化等所带来的内燃机的旋转负荷力矩(摩擦)变化而发生大的变化。因此,在本发明的电动机10中,在ROM37中储存着将起动电动机的温度和电源电压作为参数来设定逆转通电时间的逆转通电时间表格1和将起动电动机温度作为参数设定停止通电时间的停止通电时间表格2,根据这些设定各时间。图8、9是表示这些图1、2的一例的说明图。
在此,电动机10,电动机电压越低,电动机的输出功率越低。为了积蓄用于返回活塞所必要的旋转能量要花费时间。另外,温度越低油的粘性越高,由于旋转阻抗变大,积蓄移动活塞所需要的旋转能量要花费时间。再有,在这种情况下,由于惯性旋转时的惯性能量的消耗也大,所以,需要很多的惯性能量。因此,在图8中,从电池电压和起动电动机温度设定最适当的逆转通电时间t1,将其作为表格进行表示。
另一方面,在温度低时,由于旋转阻抗变大,曲轴13的旋转速度的降低得快,活塞返回到目标位置需要时间,因此,在图9中,由起动电动机温度设定最适当的停止通电时间t2,将其作为表格进行表示。
在该实施例中,虽然仅由温度条件决定停止通电时间,但也可以增添电池电压的表格数据,该表格数据起到将由于电池电压的降低,逆转通电带来的惯性能量不能充分地获得的那部分通过加长停止通电时间t2、即惯性旋转时间来使活塞确实地返回到规定的位置的作用。
CPU32从电动机温度传感器42取得电动机温度值Ts,从电池电压传感器43取得电池电压V,由这些值并参照逆转通电时间表格1及停止通电时间表格2来决定每次发动机起动的逆转通电时间t1和停止通电时间t2。由此,对应于逆转通电时间t1和停止通电时间t2进行温度补偿和电压变动补偿,即使有环境的变化也可以稳定地将活塞返回排气冲程。
在此,通过将上述的表格1、2储存在ROM37中来决定各时间t1和t2,但也可以在CPU32中设从电动机温度值Ts和电池电压V算出逆转通电时间t1的逆转通电时间算出部和从温度算出停止通电时间t2的停止通电时间算出部来运算它们。这种情况下,各时间t1、t2由例如下式那样的近似式从电动机温度和电池电压算出。
t1=0.18+(12-V)×0.02+Ts
t2=0.12+Ts×0.01
另外,在上述的例子中,是使用电动机10的温度来决定各时间t1、t2的,但,作为参数可使用的温度值不限于此,例如,也可以采用发动机冷却水温度、发动机油温、外部气温等。另外,也可以将电动机10的温度以及上述的各种温度值作为多个参数使用制作表格或近似式。
以上说明了将本发明应用于4冲发动机的例。但也可以将它应用于2冲程发动机。图10是表示2冲程发动机中的动作的曲线图。2冲程发动机与4冲程发动机的不同点是在1转中进行吸气·压缩·爆发·排气的冲程。在2冲程发动机中不存在4冲程发动机中的吸气阀和排气阀,但,其活塞自身起到了阀的作用。
如图10所示,在2冲程发动机中,在压缩冲程和爆发冲程中,气缸的吸气孔和排气孔由活塞堵塞着。而且,同时进行排气冲程和吸气冲程。即,在活塞位于与下止点接近的位置成为排气孔和吸气孔双方都敞开的状态。这时,相当于4冲程发动机的排气冲程的是:在发动机动作时(正转)中,从排气孔或进气孔的至少任何一方被开放后到活塞到达下止点之间。
因此,从图7、图10的曲线图可知,除了上述不同之外,由于在2冲程发动机中也进行与4冲程发动机相同的动作,可以得到前述同样的效果。
(实施例3)
以下对应用了实施例3的起动控制装置的发动机的起动电动机进行说明,另外,由于起动电动机自身的构成与实施例1的相同,所以省略其详细说明。
图11是表示该实施例3的起动电动机的控制系统的构成的框图。如图11所示,该电动机10,由被CPU32控制的电动机驱动器31驱动,该CPU32上连接着换向位置检测传感器5等的传感器类、发动机的起动开关34和点火开关39等的开关类。另外,在CPU32上通过点火组件36连接着发动机点火用的点火线圈35,还连接着存储着关于电动机驱动器驱动逻辑和发动机控制等的各种控制程序等的ROM(存储器)37和存储来自各传感器类的数据等的RAM38。而且,根据各传感器的输出值将控制信号送出到电动机驱动器31和点火组件36,进行电动机10和发动机点火控制等。另外,电动机10自身和CPU32等以车载电池作为电源而被驱动。
以下,对该电动机10的发动机起动动作进行说明。这种情况下,电动机10的起动动作的控制由作为起动控制装置的CPU32完成。在CPU32中还包含用于进行电动机10的起动控制的各种功能单元。图12是CPU32的功能框图。如图12所示,CPU32首先输入来自换向位置传感器25的换向位置脉冲信号,具有电动机旋转速度算出单元51和电动机旋转角度算出单元52。该电动机旋转速度算出单元51根据从换向位置检测传感器25来的换向位置脉冲信号算出电动机10的旋转速度,上述电动机旋转角度算出单元52根据上述脉冲信号算出电动机10的旋转角度。另外,取入存储在ROM37中的后述的逆转通电时间t1和停止通电时间t2,还具有根据电动机10的旋转速度和旋转角度补正它们的逆转量补正单元53和惯性旋转量补正单元54。
另外,CPU32具有电动机逆转通电指示单元55和电动机停止通电指示单元56,它们根据由逆转量补正单元53和惯性旋转量补正单元54设定的逆转通电时间t1和停止通电时间t2对电动机驱动器31指示对于电动机10的通电状态。而且,还具有在停止通电时间t2后使电动机10正转使发动机起动的电动机正转开始指示单元57。
在此,参照图13对CPU32的发动机起动控制进行说明,图13是用与发动机的各冲程的关系表示电动机10的发动机起动动作的曲线图;(a)表示各冲程中的起动负荷;(b)表示由电动机10的驱动力和曲轴13的惯性供给的起动能量;(c)表示来自换向位置检测传感器25的脉冲信号;(d)表示起动动作时的活塞位置。
如图13(a)所示,用于使曲轴13旋转的负荷根据发动机的动作行程而变化。即,由于活塞在排气冲程和吸气冲程中,在阀打开的状态下进行上下移动,所以用于使曲轴13的运动的负荷比较小,与此相反,在压缩冲程中,由于在阀关闭的状态下使活塞上升,所以,曲轴13的动作负荷大,其值在上止点成为最大,因此,在如前所述地发动机停止时,通常,活塞停止在压缩冲程前的位置,原来的起动电动机从该位置使发动机起动。因此,原来的起动电动机在起动发动机时,需要对欲要越过该压缩冲程中的负荷的曲轴供给图13中由虚线表示的能量。
与此相对,本发明的电动机10,在发动机起动时,首先沿使曲轴13逆转的方向以规定时间或规定角度进行驱动。这时,由该电动机10可以在不由凸轮传感器等的传感器类检知活塞的位置的情况下,适当地控制电动机10的逆转通电时间t1和其后的停止通电时间t2。由此,实现活塞向排气冲程的移动。这样,以在旋转负荷小的区间助跑的形式进入压缩行程,由发动机的飞轮等的旋转系统的惯性能量和电动机驱动转矩的合力克服最大负荷,实现了减轻电动机的负荷使电动机小型化、低耗电化,并且,由于省去了传感器类,实现费用的降低。
在此,在点火开关39 ON的状态下起动开关34 ON时,CPU32首先向电动机驱动器发出指令,只以规定的逆转通电时间t1对电动机10逆转通电,使曲轴13旋转到排气冲程侧。另外,在该逆转通电后,以规定的停止通电时间t2使曲轴13惯性旋转。其后,对电动机10进行正转通电,使曲轴13正转,使发动机起动。
另外,在此,在使起动开关34 ON了时,进行电动机10的逆转动作,但,在点火开关39 ON了时,通过使电动机10进行逆转动作,在将起动开关34 ON了时,电动机10马上进入正转动作,也可以在发动机起动上不产生时间滞后。因此,不一定需要用起动开关34的ON使起动电动机10逆转,也可以在将点火开关39 ON了时使逆转动作开始。另外,也可以在发动机停止时或起动开关34脱开(OFF)时使电动机10逆转。
在此,上述的起动动作,根据活塞的停止位置表示为如下的3种形态。即,表示对应于活塞位于压缩冲程前的通常的停止位置的情况(形态①)、位于排气冲程和吸入行程之间的上止点前后的情况(形态②)、位于排气冲程前的下止点附近的情况(形态③)的不同的动作。
因此,前先对上述的形态①中的起动动作进行说明。在起动开关34ON时,由CPU32的电动机逆转通电指示单元55的指令使电动机10t1秒逆转,曲轴13旋转到排气行程侧,活塞从位置A移动位置B。其后由停止通电指示单元56的指令向电动机10的停止通电t2时间,这时,曲轴13由首先的t1时间的通电获得的惯性力继续逆转。从吸气冲程到排气冲程之间,由于没有由活塞带来的压缩,负荷力矩小,曲轴13进行惯性旋转。而且,由负荷力矩消耗惯性能量,旋转速度渐渐地降低,终于停止在位置C。
这时,在CPU32中,由电动机旋转速度算出手段51和电动机旋转角度算出单元从来自换向位置检测传感器25的换向位置脉冲信号常时地监视电动机10的旋转速度和旋转角度。即,从在通电时间中计数的换向位置脉冲信号的脉冲数和脉冲间隔算出旋转速度,另外还从脉冲数的积算值算出旋转角度。从换向位置脉冲信号算出电动机10的旋转速度的变化率(dv/dt)。另外,在ROM37中存储着旋转速度的变化率的基准值Xr和由逆转通电时间t1电动机10应该到达的目标旋转速度Nr。而且,用逆转量补正单元53从旋转上升中途的旋转速度把握发动机的摩擦,将其反馈给电动机10的旋转控制。
在逆转量补正单元53中,首先进行从电动机10的旋转速度求得的旋转速度的变化率和上述基准值Xr的比较。在旋转速度的变化率小于基准值时,即,在速度变化平缓,预想电动机10达到目标旋转速度所需时间比预定的长时,逆转量补正单元53判断为曲轴13的旋转负荷比预想的大。这时,预测到如果原样地放任不管时惯性旋转时的摩擦也大,有活塞不能返回到期待的位置的危险。在此,逆转量补正单元53提高目标旋转速度Nr,使积蓄在曲轴13上的惯性能量增加,使活塞按照预定返回排气冲程内。
与此相反,在旋转速度的变化率超过了基准值时,即,在预想到速度变化急剧,电动机10比预定快地到达目标旋转速度时,判断为曲轴13的旋转负荷比预想的小。这时,预测到若照原样地放任不管,惯性旋转时的摩擦也小,有活塞走过期待位置的危险。因此,逆转量补正单元53使目标旋转速度Nr下降,使积蓄在曲轴13上的惯性能量减少,活塞按照预定返回到排气冲程内。
另外,逆转量补正单元53监视电动机10的旋转度,也由此进行旋转能量的把握。即,在旋转速度达到了目标旋转速度Nr时,即使其时是在逆转通电时间t1内也判断为惯性能量积蓄为规定量。而且,进行缩短逆转通电时间t1的补正,起动电动机逆转通电指示单元55,停止向电动机10的通电。与此相反,在未达到目标旋转速度Nr时,即使其时刻是逆转通电时间t1结束了时,也判断为惯性能量积蓄不足。于是,进行延长逆转通电时间t1的补正,起动电动机逆转通电指示单元55继续向电动机10的通电。
另外,在ROM37中存储着电动机10的逆转基准角度θr,在惯性旋转中,由惯性旋转量补正单元54比较电动机10的逆转通电时间的逆转角度和该逆转基准角度θr。在此,作为该逆转基准角度θr,设定为即使从最远的压缩冲程前的下止点开始逆转活塞也大致进入排气冲程的角度即180度。因此,该CPU32的惯性旋转量补正单元54判断电动机10的旋转角度是否超过了180°,即,是否输入了相当于180°的换向位置脉冲信号。
在旋转角度超过了180度时,判断为活塞返回排气冲程内,即使是在停止通电时间t2内,也假定达到了通电休止目的,使停止通电时间结束。于是将其意旨通知给电动机停止通电指示单元56,并在起动开关34被ON了时对电动机正转开始指示单元57发出立刻开始电动机10的正转的指令。
与此相反,在旋转速度为180°以下时,在电动机10的脉冲信号成为规定周期以上的间隔、电动机旋转速度成为规定速度(例如速度0=停止)以下时,判断为活塞返回到排气冲程内,于是,在此时,即使是停止通电时间t2内也作为未达到通电休止目的,而暂时中止停止通电时间,再次短时间使电动机10逆转。即,在对电动机停止通电指示单元56通知通电时间结束的同时,给电动机逆转通电指示单元55发出短时间的逆转通电的命令。于是,在该短时间的逆转通电后,再次开始停止通电时间t2,在通电旋转角度超过了180°时,由前述的处理结束停止通电时间。
另外,通过这些逆转操作,活塞返回到图13(d)中称为“正转开始范围”的排气冲程内的位置C,但由于排气冲程开始前的下止点附近位置助跑时间最长,所以最好返回到其位置。但是,位置C开始正转的“排气冲程内”的位置也包括排气冲程前后中的爆发冲程的下止点附近和吸气冲程的上止点附近。
在停止通电时间t2终止了时,CPU32的电动机正转开始指示单元57向电动机驱动器31输出使电动机10正转的信号,使发动机从排气冲程起动。这时,由于曲轴13在排气冲程和吸气冲程中以低负荷进行旋转,因此,电动机10在进入压缩行程前,达到与无负荷转速接近的几乎最大的转速,成为与饱和状态接近的转速。因此在活塞进入压缩冲程跟前被电动机10以可能的最大的转速转动,积蓄于其旋转系统的惯性团体上的惯性能量也成为最大的状态而突入压缩冲程。
因此,曲轴13在压缩冲程中,如图13(b)所示地由惯性能量(点划线)和电动机能量(实线)的和的合成能量(粗实线)旋转。即,曲轴13由伴随着其转速的降低而释放出的惯性能量而产生的转矩Ti和电动机驱动转矩Tm驱动,由作为它们的和的越过转矩T=Tm+Ti克服初次的压缩行程负荷。
这时,在适用了本发明的电动机的发动机中,通过如图13(b)所示地使Tm≤Ti,电动机驱动转矩Tm≤T/2。即,以惯性能量为主、电动机能量为辅地进行压缩冲程负荷的克服,用越过转矩T的1/2以下的最大转矩(起动扭矩)的电动机10就可以起动发动机。另外,如图13(b)所示,电动机10将其驱动能量分为助跑时和越过时2次地供给曲轴13。因此,与由1次能量进行克服压缩冲程的原来的电动机相比,可以用小的输出能量的电动机产生大的越过转矩。
在这样地越过了初次的压缩冲程后,积蓄惯性能量,可以容易地克服其后的压缩行程中的负荷。而且,通过在规定的时间内由点火线圈35飞出电火花使发动机起动。
以下,对上述的形态②中的起动动作进行说明。在此,活塞处于排气冲程的吸气冲程之间的上止点附近(位置D),从此开始逆转动作。在这种情况下,在逆转通电时间t1的期间移动到位置E,以其后的惯性旋转,活塞返回到排气冲程的下止点进入爆发冲程。但是,在爆发冲程中由于产生活塞带来的压缩负荷,所以,旋转负荷转矩变大,惯性能量被该负荷转矩急剧地消耗。旋转速度降低并停止(位置F)。
这时,电动机10中,换向位置脉冲信号的脉冲间隔变长的状况急剧地变大,电动机10的旋转速度的变化率(减速率)急剧变化,超过其上限值Xmax。在惯性旋转量补正单元54中,在确认旋转速度的变化率超过了其上限值Xmax,判断为活塞通过排气冲程前的下止点,开始受到压缩阻抗。由此,取得最长的助跑区间,活塞进入了可将惯性能量最多地注入曲轴13的领域,检测出活塞到达了正转开始领域。
在此,惯性旋转量补正单元54中止停止通电时间t2,将其旨意通知给电动机停止通电指示单元56,发出立刻开始电动机10的正转的指令。于是,这时,由于活塞压缩的反作用力,曲轴13稍微向正转方向返回,活塞在下止点附近的位置G处停止。
在停止通电时间t2结束,由起动开关34输入发动机起动信号时,发动机从活塞处于排气冲程的位置G的状态起动。由此,与上述同样地由由排气冲程和吸气冲程的助跑所得到的惯性能量所产生的旋转力矩Ti和电动机的驱动转矩Tm的和克服初次的压缩行程负荷。
另外,对前述的曲线图③中的起动动作进行说明。在此,活塞处于排气冲程前的下止点(位置H),从此处开始逆转动作。在这时,由于逆转开始后立即进入爆发冲程,所以由活塞的压缩产生的旋转负荷力矩在逆转后立即产生。因此,曲轴13的旋转速度不上升,而且,也几乎不产生惯性能量。另外,由于电动机10的转矩设定于压缩越过转矩的1/2以下,不会由逆旋转越过爆发冲程。在活塞的压缩反作用力和电动机转矩几乎平衡了时,电动机锁定而停止(位置I)。
这时,电动机10,伴随着其动作,在通电中暂时开始变短了的脉冲信号变长为规定值以上,旋转速度成为该下限值Vmin以下。在逆转量补正单元53中,在确认旋转速度成为了该下限值Vmin以下时,判断为活塞通过爆发冲程下止点开始产生压缩力矩。即,判断为达到了逆转动作目的,立刻使逆转通电时间t1结束,将其意旨通知给电动机逆转通电指示单元55,并且,在起动开关34被ON了时立刻对电动机正转开始指示单元57发出开始电动机10的正转。
在逆转通电时间t1结束时,停止通电,电动机转矩消失,曲轴13在停止通电时间t2期间,借助活塞反作用力沿正转方向开始旋转,渐渐地增加旋转。其后,在下止点附近,活塞反作用力消失。其后,由于旋转负荷转矩,旋转的惯性能量渐渐地被消耗,在从排气冲程进入吸气冲程前的位置J处停止。在此处的旋转负荷转矩变小了时,由于惯性旋转,活塞有可能在停止通电t2期间从排气冲程进入吸气冲程,所以停止通电时间t2需要在活塞进入吸气冲程前结束。因此,在电动机10的换向脉冲的最大超过了相当180°程度前,即使是在停止通电时间t2结束前也开始正转通电,于是,与上述同样地,曲轴从该位置开始正转。
这样,本发明的起动控制装置,在起动发动机之前先使电动机10逆转通电时间t1逆转后,以停止通电时t2停止通电,使曲轴13惯性旋转,其后,使电动机10正旋转。这时,在该电动机10中从换向脉冲信号算出电动机10的旋转速度和速度变化率、旋转角度等,由它们推定活塞位置,适当地反馈控制逆转通电时间t1和停止通电时间t2。因此,在不特设凸轮等的检测活塞位置的传感器的情况下,可以确实地将活塞返回排气冲程,从其处起动发动机,省去传感器,可以谋求产品的成本降低。
另外,由于可以利用曲轴13具有的惯性能量来越过初次的压缩冲程,所以,减轻了电动机10的负荷,也可以谋求电动机的小型化和低成本化、低耗电化。另外,即使在磁场中使了磁铁的起动机中,由于也不需要过度地加强磁铁的磁力,所以,可以降低旋转阻抗,可以谋求防止耗油率的提高和发动机输出功率的降低。
另外,在发动机起动失败了的情况下,其后的紧接着的再起动时的到排气冲程前的逆转动作,只要起动开关34是ON,在检测到了发动机旋转停止时就立刻被自动进行,因此,电动机10立即进行与上述同样的逆转、正转动作。另外,电动机10的动作仅在检测出了制动作动、或齿轮位置处于中立位置的任何一种情况或两情况都存在时在被许可,谋求防止车辆的冲出。
以上说明了将本发明应用于4冲程发动机的例子。但也可以将它应用于2冲程发动机。图14是表示2冲程发动机中的动作的曲线图。2冲程发动机与4冲程发动机的不同点是在1转中进行吸气·压缩·爆发·排气的冲程。在2冲程发动机中不存在4冲程发动机中的吸气阀的排气阀,但,其活塞自身起到了阀的作用。
如图14所示,在2冲程发动机中,在压缩冲程和爆发冲程中,气缸的吸气孔和排气孔由活塞封塞着,另外,排气冲程和吸气冲程同时地进行。即,在活塞接近下止点的位置,排气孔和吸气孔的双方成为敞开的状态。这时,相当于4冲程发动机的排气冲程的是在发动机动作(正转)时。从排气孔成的气孔的至少任何一方开放后到活塞到达下止点之间。
因此,从图13、图14的图表可知,除了上述不同点之外,在2冲程发动机中通过进行与4冲程发动机同样的动作,也可以得到与前述同样的效果。
(实施例4)
再对实施例4的发动机的起动电动机进行说明,由于起动电动机自身的构造与实施例1的相同,所以,省略其详细说明。
图15是表示该实施例3的起动电动机的控制系统的框图。该电动机10,如图15所示,由被CPU32控制的电动机驱动器31驱动。在该CPU32上连接着检测发动机的动阀凸轮的动作的凸轮轴传感器33和发动机的起动开关34和点火关39。另外,在CPU32上通过点火组件36连接着发动机点火用线圈35。还连接着存储着关于电动机驱动器驱动逻辑和发动机控制等的各种控制程序的ROM37及存储着来自各种传感器类的数据等的RAM38。根据各种传感器的检测值向电动机驱动器31和点火组件36等发出控制信号,进行电动机10和发动机点火控制等。电动机10自身和CPU32等以车载的图中未示的电池作为电源而被驱动。
图16是表示将本发明起动装置应用于4冲程发动机的起动原理的图。该发动机具有吸气冲程、压缩冲程、爆发冲程及排气冲程,该吸气冲程在吸气阀打开、排气阀关闭的状态下,活塞从上止点进行下降,混合气被吸入气缸内。该压缩冲程在吸气阀和排气阀都关闭了的状态压缩混化气。该爆发冲程在压缩冲程结束的上止点的稍前一点点燃混合气,在吸气阀和排气阀开闭了的状态下,由燃烧产生的高压气体推下活塞。该排气冲程在吸气阀关闭、排气阀打开了的状态下将膨胀了的气体排出到外部。以曲轴13的2转、即4个冲程构成1个循环周期。
在发动机停止了的状态下,在使电动机10旋转进行起动时,如图(a)所示,根据在起动时发动机处于哪个冲程的位置,起动时的负荷不同,即,在排气冲程和吸气冲程中,由于活塞是在排气阀或吸气阀的任何一个打开了的状态下进行上下运动,用于使曲轴13旋转的负荷比较小。与此相反,在压缩行程中使发动机起动时,由于是在吸气阀和排气阀都关闭了的状态下使活塞上升,所以,曲轴13的旋转负荷较大,其值在上止点的稍前方最大。
如前所述,在发动机停止时,活塞多停止在压缩冲程的下止点附近的位置。过去的起动装置由于是从该位置起动发动机的,在起动时需要由起动电动机对曲轴13供给图16中用虚线表示的能量,以便克服压缩行程中的负荷。
本发明的起动装置,在从图16(c)所示的通常停止范围P中的、例如在停止位置Pa停止了的状态使发动机起动时,首先使曲轴13经过吸气冲程和排气冲程的位置逆转到爆发冲程内。在该逆转过程中,活塞沿与图16中用箭头所示的方向相反的方向进行移动,在吸入行程的位置,活塞朝向上止点移动,在排气冲程的位置,活塞朝向下止点移动,在爆发行程的位置,朝向上止点移动。
因此,借助该逆转,在爆发冲程中,在吸气阀和排气阀关闭了的状态下,残留在燃烧室内的气体被压缩,在燃烧室内积蓄由压缩反动而产生的正转能量,图16(b)中的双点划线表示积蓄的能量。另外,在开始起动时,不仅在活塞位于通常停止范围P的情况下,而且在活塞停止在吸入冲程和排气冲程的位置的状态从其位置起动发动机的情况下也能进行与前述同样的逆转动作。
曲轴13在逆转到了爆发冲程的正转开始范围Q中的例如翻转位置、即正转位置Qa后,由电动机10正转曲轴13。这时,由于燃烧室内的气体的压缩而积蓄的正转能量释放到含有飞轮等的曲轴13的旋转系统中,对旋转系统施加上述释放的压缩反动能量和由电动机10施加的旋转能量。
在图16(b)中,用实线表示由正转的电动机10施加到曲轴13上的电动机的能量的变化。用点划线表示积蓄到旋转系统上的惯性能量的变化。由此可见,在正转初期,在旋转系统上的惯性能量在由压缩积蓄的气体的能量的释放所产生的压缩反动中迅速地提高,再有,由于电动机10的旋转力,旋转系统的惯性能量从爆发冲程朝向压缩行程渐渐地增大。因此,在压缩冲程中,到此为止的积蓄的旋转系统上惯性能量和电动机10的能量的合成能量如粗实线所示地施加在曲轴13上。即,曲轴13由伴随着其转速的降低释放出的消耗在压缩行程的惯性能量和电动机10的转矩驱动。最大的超越转矩T借助惯性转矩的释放能量的最大值Ti和电动机转矩的最大值Tm的合计克服初次压缩行程的负荷。
图17(a)是表示起动中的活塞位置变化的图。图17(b)是表示曲轴的转速的变化的图。图17(c)是表示能量变化的图,图17(d)是表示电动机输出能量的变化的图。图17(e)是表示越过时的能量的变化图。另外,图18是表示在使曲轴13逆转到爆发冲程后使其正转时电动机的产生能量和旋转系统的能量的变化的图。
在本实施例中,通过在内燃机起动时使电动机10逆转到活塞的爆发冲程内来压缩燃烧室内的气体,积蓄其压缩反动所产生的正转的能量,通过在该能量上附加由电动机10产生的旋转能量,在曲轴13的周围的旋转系统上积蓄惯性能量,由此来越过压缩冲程,由于是如此地控制电动机10,可以使用小型的电动机10。
在使曲轴13逆转到爆发冲程时,在2冲程的情况下,设置直接检测曲轴的角度的曲轴角度传感器,根据其检测量把握曲轴角,可以决定从逆转转到正转的位置。另外,在4冲程的情况下,为了检测曲轴13的停止位置Pa和正转位置Qa,不仅可以使用来自曲轴角传感器的信号,也可以使用来自凸轮轴传感器33的信号,可以由设在曲轴和凸轮轴上的角度传感器决定逆转通电的停止和正转通电的开始。也可以在检测到了曲轴的旋转方向由压缩反作用力改变为正转了时,进行正转通电的开始。另外,仅在从这些角度传感器发生的脉冲在伴有旋转速度降低的状态下发生了的情况下可以作为正转开始的信号和逆转结束的信号使用,这时,排气冲程中的脉冲被忽视。
在2冲程、4冲程的情况下,通过以规定时间使电动机10从停止位置逆转,其后可以由惯性返回到爆发冲程,也可由电动机10驱动到爆发冲程。在停止逆转通电后进行规定时间的惯性旋转,其后进行正转通电,由此可防止过大的电流流到电动机中,使FET等的换向元件破坏。总之,可在不给FET等施加过的负荷的情况下 将逆转通电立刻切换为正转通电情况那样地进行逆转动作。
如图16(d)所示,在电动机10逆转时及正转时,由于可以从换向位置检测传感器25取出脉冲信号,也可以通过检测它而检测出从逆转状态反转到正转状态的位置。作为该逆转位置的检测方式也可以是计数电动机10逆转时的脉冲数。也可以是从脉冲间隔检测出速度,将反馈信号从检测结果送到控制部,由此可以确实地检测出翻转位置。
如果由脉冲间隔检测速度,在为了速度到达期待值而需要比预定时间长的时间时,有可能由于发动机的旋转阻力大而回不到规定的位置,由此,以提高速度目标值地进行反馈控制。另外,在速度达到期待值比规定时间早时,发动机的旋转阻力小,有走过规定位置的危险,所以,以降低速度目标值的方式进行控制。
另外,也可以通过把握旋转系统的旋转惯性能量进行通电直到旋转系统的旋转速度达到规定的目标旋转速度,在达到了目标旋转速度时停止通电。
在活塞经过吸气冲程从排气冲程变化为爆发冲程时,在活塞通过下止点变为上升移动时要受到压缩阻抗,因此,如图17(b)所示,逆转时的速度在渐渐地变高后变换为减速。因此,在旋转脉冲间隔由于增速其脉冲间隔变短后,进行减速,脉冲间隔变长。通过检测该脉冲间隔的变化,也可以检测出到达了爆发冲程的情况。另外,在不对电动机通电地以惯性返回到爆发冲程时,脉冲间隔变长的情况、即减速的情况突然大地进行变化,因此,也可以通过检测其变化检测出达了爆发冲程的情况。
以下,对发动机起动时的顺序进行说明,在点开关39 ON时,CPU32首先根据凸轮轴传感器33的检测信号认识活塞现在处于的位置。即,CPU32通过使用凸轮轴传感器33的信号进行活塞位置的确认和活塞向爆发冲程的逆转动作的准备。
在活塞停止在通常停止范围P以外的位置时,在设有凸轮轴传感器33的情况下,也可以由其检测信号检测停止位置。接着,在由起动开关34输入发动机起动信号时,CPU32根据其检测结果进行将活塞返回到爆发冲程内的决定,将指令发给电动机驱动器31,暂时使电动机10逆转,从而使曲轴13逆转到爆发冲程内。为了检测出活塞逆转到了爆发冲程内的正转起位置Qa的位置,在例如设置了凸轮轴传感器33的情况下,由凸轮轴传感器33输出表示活塞到达了爆发冲程内的H信号。由此,CPU32停止电动机10的逆转动作,迅速地开始进行正转动作。
这时,曲柄轴13由于在排气冲程和吸入冲程中在低负荷下进行旋转,所以,电动机10活塞在进入压缩行程前就达到了与无负荷旋转速度相近的最大的旋转速度,因此,曲轴13也在压缩冲程紧前方由电动机10以尽可能最大的旋转速度旋转。积蓄在旋转系统中的惯性团体的惯性能量也成为最大的状态,在此状态下突入压缩冲程。
因此,曲轴13在压缩冲程中,如图16(b)所示地由惯性能量(点划线)和电动机能量(实线)的和、即合成能量(粗实线)旋转。另外,如图16(b)所示,电动机10将其能量分为助跑时和越过时2次地供给于曲柄轴13。因此,与由供给一次能量进行克服压缩冲程负荷的过去的电动机相比较,可以高效地活用电动机能量。
另外,电动机10的动作仅在检测出了制动动作时、或齿轮啮合处于中立位置时的任何一种、或双方时才被许可进行,以谋求防止车辆的冲出。
在这样地越过了初次的压缩冲程时,由于积蓄着惯性能量,所以可以容易地克服其后的压缩冲程中的负荷。而且,以规定时间由点火线圈35飞出电火花,使发动机起动。
这样,在本发明的电动机10中,在起动发动机之前,先将活塞暂时返回到停止位置跟前的爆发行程中,从其处使发动机起动,可直到1次越过之前提高曲轴13所持有的惯性能量,所以,通过利用其能量,可由比从前小的电动机转矩越过初次的压缩行程。因此,可以实现电动机的小型化和低成本化。另外还可以降低电动机的电耗。
在上述的情况下,在使发动机起动时,首先使其从停止位置逆转到活塞的爆发冲程后,使其正转,一旦使其正转,从来自换向位置检测传感器25的脉冲间隔的变化检测出压缩冲程前的下止点,通过从该位置对电动机10逆转通电,在到达爆发冲程后的下止点时刻之前积蓄能量,可以以由该惯性能量释放产生的转矩和电动机10的转矩作为使活塞上升到爆发行程中的Qa位置的能量。
另外,首先,在使曲轴13正转到压缩行程的中途、例如压缩行程的上止点的跟前后,也可如前所述地使其逆转到爆发冲程。在这时,在压缩冲程中,同样地利用燃烧室内的残留气体的压缩反作用力与电动机的能量一起使曲轴逆转,可以作为使活塞上升到爆发冲程中的Qa位置的能量。由此,即使是更小的转矩的电动机也可以使爆发冲程中的使活塞上升的能量成为更大,可以得到更大的正转方向的反作用力。
这样,在起动时,首先使曲轴13正转,压缩燃烧室内的气体,利用其反动的进行逆转,该种方式对于2冲程的发动机有效。其原因是,在2冲程发动机中,因为每次成为爆发,仅使其逆转就马上进入了压缩行程,难以充分确保用于作为旋转能量积蓄的助跑区间。
图19是表示在起动时,首先使曲轴13正转到压缩冲程的中途,在压缩了燃烧室内的气体后,利用其反动使曲轴13逆转时的起动动作的图。图20是表示这种情况下的能量变化的图。这样,通过在逆转动作前增添正转动作,在2冲程发动机的情况下也可以实现电动机10的小型化。
再者,由于利用该正转侧的压缩反作用力和逆转侧的压缩反作用力越过正转方向的压缩点,积蓄惯性能量的方法对多气缸的发动机的起动有效。特别是4冲程发动机180°排列两气缸曲轴的发动机中,如图21所示,从停止位置起的正转方向逆转方向的任何一方,气缸A或气缸B的活塞成为压缩方向,所以形成积蓄旋转能量的助跑区间。
在这时,多次利用正转方向的压缩反作用力和逆转方向的压缩反作用力的双方渐渐地提高压缩的反作用力能量,最终可以获得越过正转方向的压缩点的惯性能量。
另外,在这些上述的多个实施例中,在利用在逆转方向中将惯性能量利用在爆发方向上来积蓄压缩能量时,由于温度所产生的旋转附加变化等有可能沿逆转方向越过了压缩,为了防止此种情况发生,检测逆转方向的压缩的活塞位置,在返回到有沿逆转方向越过的危险时的角度时,停止逆转方向的通电,必须立即切换为正转方向的通电。对于活塞位置的检测也可以使用曲轴角传感器和凸轮轴传感器,也可以使用无刷电动机的换向脉冲的脉冲计数数量。
(实施例5)
以下对实施例5的发动机起动电动机进行说明。图22是表示本发明的一实施例中的发动机起动电动机的构造的剖面图。图23是省略了图22的起动电动机的壳体和盖的正视图。
图22的起动电动机(以下简称为电动机)110直接连接在机动二轮车用的4冲程发动机上,具有固定在发动机的发动机壳体111上定子112和与发动机的曲轴113连接的转子114。
转子114备有用铁等的磁性材料形成的有底的短圆筒形状的轭115,在这轭115的底壁的内面上同心状地一体地突设着圆筒状的毂部116。毂部116和曲轴113的各自的锥面锲状地结合并由装配螺母117紧固着,从而使该转子114与曲轴113一体地转动。在轭115的内周面上沿周向交替地各多个地配置固定着相同数量的用铁等磁性材料(透磁率大的材料)形成的控制磁级128和用于构成励磁元件的永久磁铁118。该永久磁铁118和控制磁级128形成为相互大小相等的圆弧状的长方体,并沿周向隔离等间隔地交替地配设着。另外,相邻的永久磁铁118彼此同极地形成,异极由其间的控制磁极128形成。
电动机110的定子112具有用铁等的磁性材料形成为大致星形的浅圆盘形的芯119。芯119由作为紧固装置的螺栓121固接在壳体120上,在壳体120的外侧安装着盖126,在壳体120内的定子112的外侧围着其外周地配设着转子114,该壳体120与曲轴113同心地配置地安装在发动机壳体111的外面上,转子114通过曲轴113的驱动而绕定子112旋转。
芯119具有将铁制叠层的许多片磁性材料构成的薄板而形成为一体的形成为环状的本体122。在芯本体122的外周上放射状地突设着多根突极123。在各突极123上分别三相绕组地线地绕着定子线圈124。该定子线圈124通过图中未示的端子由导引线和细电线束(都未图示)连接在后述的电动机驱动器上。即,该电动机110为由电动机驱动器驱动的无刷电动机。
在芯本体122的轭115的底部侧圆筒状地形成着并且同心地配设固定着用于控制磁场磁通量的励磁控制线圈129。励磁控制线圈129的绕线方法为相对于定子122及转子114地成为同心圆的方式。因此,分别形成励磁控制线圈129的磁通F其大部分经由芯119的本体122、与控制磁极122相对的突极123、转子114的控制磁极128、轭115、毂部116及芯119的闭磁路。
对于励磁控制线圈129的励磁控制由后述的励磁线圈控制部进行,在沿增加作用于定子线圈124上的磁场的有效磁通的方向励磁励磁控制线圈129时,与定子线圈124交链的磁场的磁通成为在永久磁铁118的磁通上重叠励磁控制线圈129的磁通F的磁通。磁通变化以对应于通电于励磁控制线圈129中的电流的磁通增加了的程度变大,产生于定子线圈124上的磁力增加。由此,控制磁极128作为与永久磁铁118逆向的磁极获得同程度以上的磁力。可以构成起动扭矩大的电动机特性。
另外,在为了使控制磁极128与永久磁铁118成为同极而与上述的情况逆向地对励磁线圈129通电时,由于成为永久磁铁118的磁通和励磁控制线圈129的磁通F差动地交链于固定线圈124上,磁通变化以对应于通电到励磁控制线圈129上的电流地磁通相抵消的程度变小。由此,作用于定子线圈124上的有效磁通自身减少,芯119的铁损减少。由此,控制磁极128获得弱的磁力,可以构成起动扭矩小的电极特性。
在电动机110上,多个(例如3个)换向位置检测传感器125配设在壳体120内,用以感应永久磁铁130的磁性地检测转子114的旋转位置。换向位置检测传感器125的输出通过控制电路供给于后述的电动机驱动器上。电动机驱动器生成对应于来自换向位置检测传感器125的检测信号的通电信号,将根据该通电信号的电流供向定子线圈124,依次地励磁定子线圈124。在依次地励磁定子线圈124时,由定子线圈124形成旋转磁场。该旋转磁场作用于永久磁铁118,由该旋转磁场旋转转子114,转子114的旋转力通过轭115的毂部116传递到曲轴113上,起动发动机。
图24是表示电动机110的特性的特性线图,图25是表示电动机特性的切换控制的特性线图。
如这些特性线图所示,在给励磁控制线圈129通电增强磁场时,由于起动力矩变大,所以低旋转时的旋转上升率变大。但是,由于无负荷旋转速度低,旋转速度的饱和快,最大旋转速度变低。与此相反,在减弱磁场时,由于无负荷旋转速度高,旋转速度的饱和慢,最大旋转速度高,但,由于起动力矩小,所以,低旋转时的旋转上升率小。
因此,如图25所示,通过切换电动机特性,通过在旋转速度低的区域增强磁通而提高旋转上升率,在旋转速度高的区域减弱磁通可提高最大旋转速度。
图26是表示上述的电动机110的控制电路的框图,对CPU131输入来自上述的换向位置检测传感器125、检测发动机的动阀凸轮的动作的凸轮轴传感器132、起动开关133、点火开关134、ACG脉冲发生器135的信号。从该CPU131对电动机控制器136和励磁线圈控制部137发送控制信号,该电动机控制器136用于控制对定子线圈124的电流供给,该励磁线圈控制部137控制对励磁控制线圈129的电流供给。从该CPU131还向控制发动机点火用点火线圈138的点火时间的点火部件139发送控制信号。另外,存储着关于电动机驱动器驱动逻辑和发动机控制等的各种控制程序的ROM141和存储着来自各种传感器类的数据等的RAM142与CPU131连接着。另外,电动机110其自身和CPU131等以车载的图中未示的电池作为电源被驱动。
图27是表示将本发明的起动装置应用于4冲程发动机时的起动动作的图。该发动机具有吸气冲程、压缩冲程、爆发冲程和排气冲程;在该吸气冲程中在吸气阀和排气阀关闭着的情况下活塞从上止点下降,混合气吸入气缸内;该压缩冲程中,在吸气阀和排气阀都关闭着的情况下压缩混合气;在爆发冲程中,在压缩冲程的结束的上止点的稍前处点燃混合气,在吸气阀和排气阀关闭着的状态下,由燃烧产生的高压气体推下活塞;在该排气冲程中,在吸气阀关闭、排气阀打开的状态下将膨胀的气体排出到外部。以曲轴113的2转、即4冲程构成一循环。
在发动机停止了的状态下,在使电动机110旋转进行起动时,如图(a)所示,在起动时根据发动机处于哪个冲程的位置,起动旋转时的负荷不同。即,在排气冲程和吸气冲程中,由于活塞在排气阀和吸气阀打开着的状态下进行上下运动,用于使曲轴113转动的负荷比较小。与此相反,在压缩冲程中使发动机起动时,由于是活塞在吸气阀和排气阀关闭着的状态使活塞上升,所以曲轴113的起动时的负荷大,其值在上止点处最大。同样,在爆发冲程中使发动机起动时,必须在吸气阀和排气阀关闭的状态下使活塞朝向下止点下降移动,曲轴113的起动负荷变大。
如前所述,在发动机停止时,通常活塞大都停止在压缩行程的下止点的附近的位置。在从前的起动装置中,从该位置起动发动机,在起动发动机时,需要由起动电动机对曲轴113供给由虚线所示的能量,以克服压缩行程中的负荷。
在图27所示的情况下,在使发动机从例如停止在停止位置Pa的状态进行起动时,首先,由电动机10使曲轴13逆转,在返回到排气冲程后,使曲轴113正转,由此,以在旋转负荷小的区间中进行助跑的形式进入压缩行程,以由发动机的飞轮等产生的旋转系统的惯性能量和电动机驱动转矩的合力克服最大负荷,通过减轻电动机的负荷谋求电动机小型化和低耗电化。
在使曲轴113正转时,如图25所示,通过对励磁控制线圈通电来增强励磁,从而使电动机110起动。在电动机110的旋转速度上升时,电动机110的起动转矩渐渐降低,如图24所示,在越过无负荷旋转速度的大致1/2时的旋转速度时,电动机输出功率超过最大输出点,可以将电动机的输出有效地变换为旋转能量。即,旋转的上升率降低。
在这时减弱励磁时,电动机特性的起动转矩和最大输出功率变小,但在高的旋转速度下转矩和电动机输出功率变高。由此,可以再次将电动机输出有效地转换为旋转能量。即,可以提高旋转速度的上升率。在从电动机110的正转开始到压缩冲程之间反复进行该控制时,通过依次地将这时的通向励磁线圈的通电切换为沿加强励磁的方向大电流→小电流→无通电、沿减弱励磁的方向小电流→大电流,可以得到最佳效率的旋转上升、即惯性能量的积蓄。
这样,对于备有可改变磁场的励磁线圈的起动装置来说,在起动时,进行用于增强励磁的磁场通电,与电动机特性的切换时间相吻合地控制向励磁线圈的通电,可进行有效的旋转上升。
通过设置与电动机的旋转同步地发生脉冲的装置,可从该脉冲间隔求得旋转速度,但电动机使用的是无刷电动机时,通过利用用于检测电枢线圈的通电换向位置检测传感器脉冲,不需要设特别的传感器。
以下,对图27所示的发动机的起动顺序进行说明,在点火开关134ON时,CPU131首先根据凸轮轴传感器132的检测信号确定活塞现在所处的位置,判定活塞是否有必要返回排气冲程。总之,CPU131通过使用凸轮轴传感器132的信号,实行活塞位置的确认和活塞向排气冲程的确实的移动。
在活塞处于排气冲程以外的冲程时,CPU131进行将活塞返回到排气冲程的决定,向电动机驱动器136发送指令,暂时使电动机110逆转,将曲轴113旋转到排气冲程侧。即,在点火开关ON的阶段,在活塞处于图27(c)的位置Pa时,使其如箭头所示地逆转移动到排气冲程。这时,发动机的活塞位置由凸轮轴传感器132经常地监视,凸轮轴传感器132在活塞来到了排气行程时,发出H信号。在由来自该凸轮轴传感器132的检测信号(H)检测出活塞来到排气行程时,CPU131停止电动机110的逆转动作,使活塞在位置Qa暂时停止。
这时,活塞返回图27(c)中的正转开始范围Q的排气行程内的位置Qa,但是,排气行程开始前的下止点近旁位置的助跑区间最长,因此希望回到其位置。但是,位置Qa作为开始正转的排气行程内的位置,包括排气行程前后的爆发冲程的下止点附近和吸气冲程的上止点附近。
另外,在由凸轮轴132检测到起动动作开始时刻,活塞已经处于排气冲程的位置R时,CPU131进行不需要将活塞返回到排气冲程的决定,不进行上述那样的逆转动作。
在此,将点火开关134ON了时,进行电动机110的逆转动作,这是为了在使起动开关133ON了时,电动机110马上进行正转动作,以使发动机起动不产生时间滞后。因此,不一定需要将点火开关ON使电动机110逆转,也可以从使起动开关133ON时起使逆转动作开始。另外,也可以在发动机停止时和起动开关OFF了时使之逆转。
在从起动开关133输入发动机起动信号时,CPU131对电动机驱动器136输出使电动机110正转的信号,将发动机从排气冲程使曲轴113正转。在电动机110开始旋转时刻沿增强励磁的方向对励磁线圈129通电,提高起动扭矩。在旋转速度渐渐地上升并越过规定的旋转速度N1时刻,停止向励磁线圈129通电,将电动机特性切换为无负荷转速高的特性,在旋转速度上升并越过规定转速N1时,沿减弱励磁的方向向励磁线圈129的通电,切换电动机特性(图25),由此,可以有效地提高电动机110的旋转速度,在活塞进入压缩冲程前,使之成为比以特性切换前的电动机特性可上升的最高转速还高的旋转速度。因此,曲轴113也在压缩行程紧前处由电动机110以可能最大的旋转速度旋转,积蓄在其旋转系统的惯性团体上的惯性能量也成为最大状态,以此状态突入压缩冲程。
因此,曲轴113在压缩冲程中如图27(b)所示地由惯性能量(点划线)和电动机能量(实线)的和的合成能量(粗实线)旋转。即,曲轴113由伴随着其转速的降低而放出的惯性能量带来的转矩Ti和由马达的驱动力矩Tm驱动,作为它们的和的越过力矩T=Tm+Ti克服初次的压缩冲程负荷。
另外,由于克服该压缩行程时的惯性能量的释放,旋转速度降低,在比上述规定旋转速度N2、N1低时,再次切换为对应于其旋转速度的电动机特性。由此,可提高越过时的电动机转矩。
这时,在应用了本发明的电动机的发动机中,如图27(b)所示,由于使Tm≤Ti,电动机驱动转矩Tm≤T/2。即,将惯性能量为主、电动机能量为辅地进行压缩冲程负荷的克服,从而可以用克服扭矩T的1/2以下的最大起动扭矩(lock torquer)的电动机110起动发动机,另外,如图27(b)所示,电动机110将其驱动能量分为助跑时和越过时的二次地给予曲轴13。因此,与由1次能量的赋予进行克服压缩冲程负荷的原来的电动机相比,可以用小输出功能的电动机产生大的越过扭矩。
另外,在发动机不起动时,直到其之后紧接着的再起动时的排气冲程前的逆转动作只要点火开关134为ON,在检测到发动机旋转停止时就马上自动地进行。因此,在起动开关133再度ON时,电动机110立即进入正转动作,不产生时间滞后,另外,电动机110的动作仅在检测出了制动动作或齿轮位置处于中立位置的任何一种、或检测了双方都存在时才被许可,是为了防止车辆的冲出。
这样,在越过了初次的压缩行程后,积蓄惯性能量,可以容易地克服其后的压缩冲程中的负荷。而且,通过以规定的时间由点火开关35飞出电火花,使发动机起动。
这样,在图27所示的情况下,在发动机起动之前先将活塞暂时返回到排气冲程,从其处使发动机起动,由此,可以利用曲轴113所具有的惯性能量,由比原来小的电动机转矩进行初次的压缩行程的越过。因此,可以谋求电动机的小型化和低成本化。另外还可以降低电动机的电耗。另外,即使在磁场中使用了磁铁的起动机中,由于不需要过度地增强磁铁的磁力,所以,可以降低旋转阻抗,可以谋求防止耗油量的提高和发动机输出的降低。
图28是表示本实施例的起动装置的控制电路的框图,图29是表示用与发动机的各冲程的关系表示由该控制电路作动的电动机110的发动机起动动作的曲线图表。这时电动机110也使用上述特性的电动机。
在这情况下,与图27所示的情况相同,在起动发动机时,首先沿使曲轴113逆转的方向进行驱动,在使活塞暂时移动到排气冲程后使发动机起动。但,在不由凸轮轴传感器等的传感器类检测活塞的位置的情况下,通过适当地控制电动机110的逆转通电时间和其后的通电时间,实现活塞向排气冲程的移动。因此,检测电动机的温度的电动机温度传感器143和检测电池电压的电池电压传感器144的检测信号被送到CPU131。
在点火开关134ON的状态下起动开关133ON时,CPU131首先向电动机驱动器136发出指令,只以规定时间对电动机110逆转通电,使曲轴113旋转到排气冲程侧。另外,在该逆转通电后,终止规定时间通电,使曲轴113惯性旋转。在规定的通电休止时间后,对电动机110进行正转通电,使曲轴113正转,使发动机起动。
另外,在此,在使起动开关133ON了时,进行电动机110的逆转动作,但,在点火开关134ON了时,电动机110马上进入正转动作,也可以在发动机上不产生时间滞后。因此,也可以不一定需要用起动开关133的ON使起动电动机110逆转,而是在将点火开关134ON了时开始逆转动作。
上述的起动动作,根据活塞的停止位置表示为如下的3种形态。即,表示对应于活塞位于压缩冲程前的通常的停止位置的情况(形态①)、位于排气冲程和吸入行程之间的上止点前后的情况(形态②)、位于排气冲程前的下止点附近的情况(形态③)的不同的动作。
因此,首先对上述的形态①中的起动动作进行说明。在起动开关133ON时,由CPU131的指令,使电动机110逆转t1时间,曲轴113旋转到排气行程侧,活塞从位置A移动位置B。其后向电动机110的通电停止t2时间,这时,曲轴113由首先的t1时间的通电获得的惯性力继续逆转。从吸气冲程到排气冲程之间,由于没有由活塞带来的压缩所以负荷力矩小,曲轴113进行惯性旋转。而且,由负荷力矩消耗惯性能量,旋转速度渐渐地降低,终于停止在位置C。
这时,首先的逆转通电时间t1设定为可以借助由通电得到的惯性力活塞由于惯性返回到排气冲程前的下止点附近的时间以上的值。另外,在逆转通电时间t1过长时,曲轴113的旋转速度过高,有惯性能量大,在停止通电时间t2中越过爆发冲程的危险。因此,逆转通电时间t1设定为在活塞处于压缩冲程前的下止点时,即使使曲轴113逆转,在惯性旋转中也不越过爆发冲程的时间以下。即,根据该条件决定逆转通电时间t1的最小值·最大值。
另外,在停止通电时间t2后,电动机10被正转通电,但,若停止通电时间t2后过短,会产生在惯性旋转中活塞不返回排气冲程的情况。因此,在此决定停止通电时间t2的最小值,也符合上述的逆转通电时间t1,借助这些条件设定,活塞在停止通电时间t2期间从位置B移动到排气冲程中的位置C。
另外,这时,活塞返回到图29(d)中称为“正转开始范围”的排气冲程的位置C,但由于排气冲程开始前的下止点附近位置助跑时间最长,所以最好返回到其位置。但是,位置C作为开始正转的“排气冲程内”的位置也包括排气冲程前后中的爆发冲程的下止点附近的吸气冲程的上止点附近。
在停止通电时间t2终止了时,CPU131向电动机驱动器136输出使电动机110正转的信号,使发动机从排气冲程起动,这时,由于曲轴113在排气冲程和吸气冲程中以低负荷进行旋转,因此,电动机110在活塞进入压缩冲程前,达到与无负荷转速相近的几乎最大的转速,成为接近于饱和状态的转速。因此,曲轴113也在压缩冲程紧前方被电动机110以可能的最大的转速转动,积蓄于其旋转系统的惯性团体上的惯性能量也成为最大的状态而突入压缩冲程。
因此,曲轴113在压缩冲程中,如图29(b)所示地由惯性能量(点划线)和电动机能量(实线)的和的合成能量(粗实线)旋转。即,曲轴113由伴随着其转速的降低而释放出的惯性能量而产生的转矩Ti和电动机驱动转矩Tm驱动,由作为它们的和的越过转矩T=Tm+Ti克服初次的压缩行程负荷。
这时,通过如图29(b)所示地使Tm≤Ti。电动机驱动转矩Tm≤T/2。即,以惯性能量为主、电动机能量为辅地进行压缩冲程负荷的克服,用越过转矩T的1/2以下的最大扭矩(起动扭矩)的电动机110就可以起动发动机。另外,如图25(b)所示,电动机110将其驱动能量分为助跑时和越过时2次地供给曲轴13。因此,与由1次能量进行克服压缩冲程负荷的原来的电动机相比,可以用小的输出能量的电动机产生大的越过转矩。
这样地越过了初次的压缩冲程后,积蓄惯性能量;可以容易地克服其后的压缩行程中的负荷。而且,通过以规定的时间由点火线圈138飞出电火花来起动发动机。
以下,对上述的形态②中的起动动作进行说明。在此,活塞处于排气冲程和吸气冲程之间的上止点附近(位置D),从此开始逆转动作。在这种情况下,在逆转通电时间t1的期间移动到位置E,以其后的惯性旋转,活塞返回到排气冲程的下止点进入爆发冲程。但是,在爆发行程中由于产生活塞带来的压缩负荷,所以,旋转负荷转矩变大,惯性能量被该负荷转矩急剧地消耗。旋转速度降低并停止(位置F)。这时,由于活塞压缩的反作用力,曲轴113稍稍向正转方向返回,在下止点附近的位置G停止。
在通电时间t2结束时,发动机的活塞从处于排气冲程的位置G的状态起动。由此,与上述相同,由排气冲程和吸气冲程的助跑所获得的惯性能量带来的转矩Ti和电动机的转矩Tm的和克服初次的压缩冲程负荷。
以下再对上述的形式③的起动动作进行说明。在此,活塞处于排气冲程前的下止点附近(位置H),从此处开始逆转动作。在这时,由于在逆转开始后马上进入爆发冲程,由活塞的压缩产生的旋转负荷力矩在逆转后马上产生。因此,曲轴113的旋转速度不上升,而且,也几乎不产生惯性能量。另外,由于电动机10的转矩设定为小于压缩越过转矩的1/2,所以,不会由逆旋转越过爆发冲程,在活塞的压缩反作力和马达的转矩几乎平衡了时,电动机锁定而停止(位置I)。
在经过逆转通电时间t1时,停止通电,马达转矩消失,曲轴13在停止通电时间t2期间由活塞反作用力沿正转方向正转,并渐渐地增加正转转速,其后,在下止点附近,活塞反作用力消失,其后,旋转的惯性能量由旋转负荷力矩渐渐地消耗,在从排气冲程进入吸气冲程前的位置J停止。而且,与前述同样,曲轴运动从该位置开始。但是,由于在停止通电时间t2期间,活塞也有可能从排气冲程进入吸气冲程,所以,停止通电时间t2需要在活塞由于反作用力进入吸气冲程前结束。即,由此决定停止通电时间t2的最大值。
这样,本发明的电动机110,在起动发动机之前先以由上述的形态①说明的条件设定的逆转通电时间t1使电动机110逆转。另外,以用形态(1)、(3)说明了的条件设定的停止通电时间t2停止通电,使曲轴113惯性旋转。然后,通过使电动机110正转将活塞暂时返回到排气冲程,可使发动机起动。这时,该电动机10借助逆转通电时间t1和停止通电时间t2的设定可将活塞确实地返回排气冲程。因此,在不设凸轮轴传感器等的检测活塞位置的传感器的情况下可以进行从排气冲程起的发动机的起动。省去了传感器,可以实现产品的成本的降低。
可是,上述的情况,即使设定逆转通电时间t1和停止通电时间t2,电动机110的动作的逆转量(角度)也由于电池的电压的变动、温度变动所引起的电动机性能变化、温度变动所引起的油的粘性的变化等所带来的内燃机的旋转负荷力矩(摩擦)变化而发生大的变化。因此,在本发明的电动机110中,在ROM141中储存着将起动电动机的温度和电源电压作为参数来设定逆转通电时间的逆转通电时间表格1和将起动电动机温度作为参数设定停止通电时间的停止通电时间表格2,根据这些设定各时间。图30是表示停止通电时间表格3的一例的说明图。
在此,电动机111,电动机电压越低,电动机的输出功率越低。为了积蓄用于返回活塞所必要的旋转能量要花费时间。另外,温度越低油的粘性越高,由于旋转阻抗变大,积蓄移动活塞所需要的旋转能量要花费时间。再有,在这种情况下,由于惯性旋转时的惯性能量的消耗也大,所以,需要很多的惯性能量。因此,在图30中,从电池电压和起动电动机温度设定最适当的逆转通电时间t1,将其作为表格进行表示。
在温度低时,由于旋转阻抗变大,曲轴113的旋转速度的降低得快,活塞返回到目标位置需要时间,因此,在图31中,由起动电动机温度设定最适当的停止通电时间t2,将其作为表格进行表示。
在这时,虽然仅由温度条件决定停止通电时间t2,但也可以增添电池电压的表格数据,该表格数据起到将由于电池电压的降低,逆转通电带来的惯性能量不能充分地获得的那部分通过加长停止通电时间t2、即惯性旋转时间来使活塞确实地返回到规定的位置的作用。
CPU32,从电动机温度传感器143取得电动机温度值Ts,从电池电压传感器144取得电池电压V,由这些值并参照逆转通电时间表格及停止通电时间表格来决定每次发动机起动的逆转通电时间t1和停止通电时间t2。由此,对应于逆转通电时间t1和停止通电时间t2进行温度补偿和电压变动补偿,即使有环境的变化也可以稳定地将活塞返回排气冲程。
在此,通过将上述图30及图31所示的表格储存在ROM141中来决定各时间t1和t2,但也可以在CPU131中设从电动机温度值Ts和电池电压V算出逆转通电时间t1的逆转通电时间算出部和从温度算出停止通电时间t2的停止通电时间算出部来运算它们。这种情况下,各时间t1、t2由例如下式那样的近似式从电动机温度和电池电压算出。
t1=0.18+(12-V)×0.02+Ts
t2=0.12+Ts×0.01
另外,在上述的例子中,是使用电动机110的温度来决定各时间t1、t2的,但,作为参数可使用的温度值不限于此,例如,也可以采用发动机冷却水温度、发动机油温、外部气温等。另外,也可以将电动机110的温度以及上述的各种温度值作为多个参数使用制作表格或近似式。
而且,在上述的情况下,由时间控制着逆转的惯性旋转,但也可以由电动机110的旋转角度控制它们,在这种情况下,由来自图29(c)所示的换向位置检测传感器125的检测脉冲信号确认电动机110的旋转角度,实行规定角度移动程度的逆转通电和停止通电。
图32是表示为了进行与图29所示的情况相同的发动机的起动动作而设在CPU131上的各种功能单元的框图。
这种情况下的起动动作的控制与图26和图28所示的情况同样地由控制电路进行控制。
如图32所示,CPU131首先输入来自换向位置传感器125的换向位置脉冲信号,具有电动机旋转速度算出单元151和电动机旋转角度算出单元152。该电动机旋转速度算出单元151根据从换向位置检测传感器125来的换向位置脉冲信号算出电动机110的旋转速度,上述电动机旋转角度算出单元152根据上述脉冲信号算出电动机10的旋转角度。另外,取入存储在ROM141中的后述的逆转通电时间t1和停止通电时间t2,还具有根据电动机110的旋转速度和旋转角度补正它们的逆转量补正单元153和惯性旋转量补正单元154。
另外,CPU131具有电动机逆转通电指示单元155和电动机停止通电指示单元156,它们根据由逆转量补正单元153和惯性旋转量补正单元154设定的逆转通电时间t1和停止通电时间t2对电动机驱动器136指示对于电动机110的通电状态。而且,还具有在停止通电时间t2后使电动机110正转使发动机起动的电动机正转开始指示单元157。
在此,首先对图29所示的形态①中的起动动作进行说明。在点火开关34 ON的状态下,起动开关33 ON时,CPU131通过电动机逆转通电指示单元155的指令使电动机110t1秒逆转,曲轴113旋转到排气冲程侧,活塞从位置A移动到位置B。而且,其后通过电动机停止通电指示单元156的指令,t2秒停止向电动机110的通电。这时曲轴113借助由前面的t1秒的通电所获得的惯性力继续逆转。从吸气冲程到排气冲程之间由于没有活塞的压缩,负荷转矩小,所以,曲轴113进行惯性旋转。然后,由于负荷转矩,惯性能量被消耗,旋转速度渐渐地降低、最终停止在位置c。
这时,在CPU131中,由电动机旋转速度算出单元151及电动机旋转角度算出单元从来自换向位置检测传感器125的换向位置脉冲信号常时地监视电动机110的旋转速度和旋转角度。即,从在通电时间中计数的换向位置脉冲信号的脉冲数的脉冲间隔算出旋转速度,另外,从脉冲数的累计值算出旋转角度。另外,还从换向位置脉冲信号算出电动机110的旋转速度的变化率(dv/dt),另外,在ROM141中储存着旋转速度的变化率基准值Xr和由逆转通电时间t1电动机110应达到的目标旋转速度Nr。而且,在装置量补正单元153中,由旋转上升途中的旋转速度把握发动机的摩擦力,将其反馈到电动机110的旋转控制中。
在逆转量补正单元153中,首先进行从电动机110的旋转速度求得的旋转速度的变化率和上述基准值Xr的比较。在旋转速度的变化率为基准值以下时,即,在预想到速度变化平缓、电动机110达到目标旋转速度需要比预定的时间长的时间时,逆转量补正单元153判定为曲轴113的旋转负荷比预想的大。这时,预测到若原样地放任不管惯性旋转时的摩擦也大,有活塞不返回到期待的位置的危险。因此,逆转量补正单元153通过提高目标旋转速度Nr使积蓄在曲轴113上的惯性能量增加,使活塞按照预定返回到排气冲程内。
与此相反,在旋转速度的变化率超过了基准值时,即,预想速度变化急剧,电动机110达到目标旋转速度比预定的早时,判定曲轴113的旋转负荷比预想的小。这时,若放任不管,预测到惯性旋转时的摩擦力也小,有活塞走过期待的位置的危险。因此,逆转量补正单元153降低目标旋转速度Xr,使积蓄在曲轴113上的惯性能量减少,活塞按照预定返回到排气冲程内。
另外,在逆转量补正单元153中,电动机110的旋转速度自身被监视,旋转惯性能量的把握也由此进行。即,在旋转速度达到了目标旋转速度Nr时,即使其时刻是在逆转通电时间t1内,也判定惯性能量积蓄为规定量,而且,进行缩短逆转通电时间t1的补正,起动电动机逆转通电时间指示单元155而停止向电动机110的通电。与此相反,在未达到目标旋转速度Nr时,即使其时刻是逆转通电时间t1结束了的时刻,也判定为惯性能量积蓄量不足,于是,进行延长逆转通电时间t1的补正,起动电动机逆转通电指示单元155而继续向电动机110通电。
另外,在ROM141中还存储着电动机110的逆转基准角度θr,在惯性旋转中,由惯性旋转量补正单元154比较来自电动机110逆转开始时的逆转角度和该逆转基准角度θr,在此,作为该逆转基准角度θr,设定为假设从最远的压缩冲程前的下止点开始逆转到活塞几乎进入了排气冲程的角度、即180度。因此,在该CPU131的惰性旋转量补正单元154中判断电动机110的旋转角度是否超过了180°,即,换向位置信号是否输入了相当于180度的程度。
在旋转角度超过了180°时,判定活塞返回了排气冲程内,即使是通电休止时间t2内,也假设达到了通电休止目的而使通电休止时间结束。然后,将其意旨通知给电动机停止通电指示单位156,并且在起动开关33ON了时立即对电动机正转开始指示单元157发送电动机开始正转的指令。
与此相反,在旋转角度为180°以下的时刻,电动机110的脉冲信号为规定周期以上的间隔,电动机旋转速度成为规定速度以下(例如速度0=停止)时,判定活塞还未返回到排气冲程内,于是,在这时,即使在通电休止时间t2内也假定未达到通电休止目的而暂时使通电休止时间中止,再度使电动机短时间逆转。即、对电动机停止通电指示手段156通知停止通电时间结束并命令给电动机逆通电指示单元156短时间逆转通电。而且,在该短时间逆转通电后再开始通电休止时间t2,在通电旋转角度超过了180度时刻由上述的处理终止通电休止时间。
这样,在停止通电时间t2结束时,CPU131的电动机正转开始指示单元157向电动机驱动器136输出使电动机110正转的旨意的信号,使发动机从排气冲程起动。这时,曲轴113由于在排气冲程和吸气冲程中在低负荷下旋转,电动机110在活塞进入压缩冲程前达到与无负荷转速相近的几乎最大的转速,成为接近于饱和状态的转速。因此,曲轴113也压缩冲程紧前处由电动机110以可能的最大的转速旋转,积蓄在其旋转系统的惯性团体上的惯性能量也成为最大状态,以该状态突入压缩冲程。
下面对上述的形态(2)的起动动作进行说明,在此,活塞处于排气冲程和吸气冲程之间的上止点附近(位置D),从此处开始进行逆转动作。在这时,在逆转通电时间t1期间移动到位置E,活塞以其后的惯性旋转返回到排气冲程的下止点而进入爆发冲程。但是,在爆发冲程中,由于产生活塞的压缩负荷,所以,旋转负荷转矩变大。由该负荷转矩急剧地消耗惯性能量,旋转速度降低而停止(位置F)。
这时,在电动机110中,换向位置脉冲信号的脉冲间隔变长的程度急剧地变大,电动机110的旋转速度的变化率(减速率)急剧变化,越过其上限值Xmax。在惯性旋转量补正单元154中,在确定旋转速度变化率超过了该上限值Xmax时,判断为活塞通过排气冲程前的下止点进入爆发冲程而开始受到压缩阻抗。因此,最长地取得助跑区间,活塞进入了可将惯性能量最多地注入曲轴113中的领域,检测出活塞到达了正转开始领域。
在此,惯性旋转量补正单元154发出中止停止通电时间t2、将其意旨通知给电动机停止通电指示单元156、立刻开始电动机110的正转的指令。于是,发动机由于活塞压缩的反作用力,曲轴113稍微向正转方向返回,活塞在下止点附近的位置G处停止。
在停止通电时间t2结束,从起动开关133输入发动机起动信号时,发动机从活塞处于排气冲程的位置G的状态起动。由此,与上述同样,由排气冲程和吸气冲程的助跑获得的惯性能量所产生的转矩Ti和电动机的驱动转矩Tm的和克服初次的压缩冲程负荷。
再对前述形态③中的起动动作进行说明。在此,活塞处于排气冲程前的下止点附近(位置H),从此处开始逆转动作。在这时,由于逆转开始后马上进入爆发冲程,所以,在逆转后马上产生活塞的压缩所产生的旋转负荷力矩。因此,不仅曲轴113的旋转速度不提高,而且也几乎产生惯性能量,另外,电动机110的转矩设定为压缩越过转矩的1/2以下,所以,不会由逆旋转越过爆发冲程,在活塞的压缩反作用力和电动机转矩平衡时,电动机锁定而停止(位置1)。
这时,在电动机110中,伴随着其作动,在通电中暂时开始变短的脉冲信号变长为规定值以上,旋转速度成为规定下限值Vmin以下。在逆转量补正单元153中,在确认旋转速度成为该下限值Wmin以下时,判断为活塞通过爆发冲程下止点,压缩力矩开始发生。即,判断为达到了逆转动作的目的,立刻使逆转通电时间t1结束,将其意旨通知电动机逆转通电指示单元155。
在逆转通电时间t2结束了时,停止通电,电动机起动扭矩消失。曲轴113在停止通电时间t1期间借助活塞反作用力开始沿正转方向旋转并渐渐地增加转速。其后,在下止点附近,活塞反作用力消失,其后,由于旋转负荷力矩,旋转的惯性能量渐渐地被消耗,在从排气冲程进入吸气冲程前的位置J停止。在此处的旋转负荷力矩小时,由于有可能由于惯性旋转,在停止通电时间t2期间活塞从排气冲程进入了吸气冲程,停止通电时间必须在活塞进入吸气冲程前终止,因此,在电动机110的换向脉冲在最大超过相当于180°程度前即使是停止通电时间t2结束前也开始正转通电。于是,与上述同样地从该位置开始转动曲轴。在停止通电时间t2期间起动开关33被ON了时,即使是停止通电时间t2内也立刻使电动机110开始正转。
这样,在起动发动机之前先以逆转通电时间t1逆转电动机110然后仅停止通电时间t2停止通电,使曲轴113惯性旋转,其后使电动机110正转。这时,在该电动机110中,从换向位置脉冲信号算出电动机110的旋转速度、速度变化率和旋转角度等,由它们推定的活塞位置,适当地反馈控制逆转通电时间t1和停止通电时间t2。因此,可以在不特设凸轮轴传感器等的检测活塞位置的传感器的情况下确实地将活塞返回到排气冲程。可以从那里起动发动机,省去了传感器,可以谋求产品的成本降低。
图33是表示本实施例的另一变型例的起动装置的发动机起动动作的曲线图。
在这时,在从图33(c)所示的通常停止范围P中的例如停止位置Pa停止着状态使发动机起动时,首先,经过吸气冲程和排气冲程的位置使曲轴113逆转到爆发冲程内。因此,通过该逆转,在爆发冲程中,在吸气阀和排气阀关闭了的状态下,残留在燃烧室内的气体被压缩,在燃烧室内积蓄由压缩反动产生的正转能量。图33(b)中的双点划线表示被积蓄的能量。另外,在开始起动时,不仅活塞成为通常停止范围P内的情况下,而且在活塞停止在吸气冲程和排气冲程的位置的状态而从其位置使发动机起动的情况下可以与上述同样地进行逆转动作。
在曲轴113逆转到了爆发冲程的正转开始范围Q中的例如翻转位置。即正转位置Qa后,由电动机110正转曲轴113。这时,由燃烧室内的气体的压缩积蓄的正转能量释放到含有飞轮等的曲轴113的旋转系统中,在旋转系统上施加该释放的压缩反动能量和由电动机110施加的旋转能量。
在图33(b)中,用实线表示由正转的电动机110施加在曲轴113上的电动机能量的变化,用点划线表示积蓄在旋转系统中的惯性能量的变化,如其所示,在正转初期,在旋转系统中,由压缩积蓄的气体的能量的释放带来的压缩反动惯性能量得到迅速地提高,而且,由于电动机110的旋转力,旋转系统从爆发冲程朝向压缩冲程其惯性能量渐渐地增加。因此,在压缩冲程中,在此之前积蓄在旋转系统中的惯性能量和电动机110的能量的合成能量用粗实线所示地施加在曲轴113上。即,曲轴113由伴随其旋转速度的降低而释放出来的消耗在压缩冲程上的惯性能量和电动机110的转矩驱动,最大的越过转矩T通过惯性转矩的释放能量的最大值T通过惯性转矩的释放能量的最大值Ti和电动机转矩的最大值Tm的合计克服初次的压缩冲程的负荷。
图34(a)是表示起动时的活塞位置的变化的图,图34(b)是表示曲轴的转速的变化的图,图34(c)是表示能量的变化的图,图34(d)是表示电动机输出能量变化的图,图34e是表示越过时的能量的变化的图。
在这时,在起动时使曲轴113逆转到爆发冲程,通过压缩燃烧室内的气体而积蓄由压缩反动而产生的正转的能量,通过将由电动机110产生的旋转能量附加在该能量上而积蓄曲轴周围的旋转系统的惯性能量,由此,越过能量不仅包含电动机110所产生的能量,又包含压缩反动能量,因此,可以使用小型的电动机110。
在使曲轴113逆转到爆发冲程时,为了检测曲轴113的停止位置Pa、检测正转位置Qa,可以使用来自凸轮轴传感器132的信号。通过使电动机110从停止位置以规定时间逆转,在其后,可以以惯性返回到爆发冲程,也可以由电动机110驱动到爆发冲程。
另外,如图33(d)所示,在电动机110的逆转时及正转时,由于可以从换向位置检测传感器125取出脉冲信号,所以,通过检测它,也可以检测从逆转状态翻转为正转状态的位置。作为该逆转位置的检测方式,也可以为计数电动机110的逆转时的脉冲数的方式,也可以从脉冲间隔检测速度,通过检测结果将反馈信号送往控制部,可以确实地检测翻转位置。
如果要从脉冲间隔检测速度,在速度达到期待值而需要的时间比预定的时间长时,有由于发动机的旋转阻抗大而返回不到规定的位置的危险,所以,以降低速度目标值的方式进行控制。
另外,也可以通过把握旋转系统的旋转惯性能量,一直通电到旋转系统的旋转速度达到规定的目标值,在达到了目标旋转速度时,停止通电。
在活塞经过吸气冲程从排气冲程变化到爆发冲程时,由于活塞通过下止点变为上升移动时受到压缩抵抗,所以逆转时的速度在渐渐地变高后的转换为减速。因此,旋转脉冲间隔通过增速而变短后,通过减速脉冲间隔变长。通过检测该间隔的变化,也可以检测到达到了爆发冲程的情况。另外,在不对电动机通电的情况下以惯性返回到爆发冲程时,由于脉冲间隔变长的程度即减速的状况急剧地变化,所以也可以通过检测其变化检测到达了爆发冲程的情况。
下面对发动机起动时的顺序进行说明,在点火开关134ON时,CPU131首先根据凸轮轴传感器132的检测信号确认现在活塞存在的位置、即,CPU131通过使用凸轮轴传感器132的信号来实施活塞的位置的确认和活塞的向爆发冲程的逆转。
在活塞停止在通常停止范围P以外的位置时,在设有凸轮轴传感器132的情况下也可以由其检测信号检测停止位置。根据检测结果,CPU131进行将活塞返回爆发行程内的决定,向电动机驱动器136发出指令,使电动机110暂时逆转,使曲轴113旋转到爆发冲程内。在检测出了活塞逆转到了爆发冲程内的正转开始位置Qa的位置时,如果设置着凸轮轴传感器132,由凸轮轴传感器132输出表示活塞到达了爆发冲程内的H信号。由此,CPU131停止电动机110的逆转动作,将活塞暂时停止在位置Qa。
接着,在由起动开关133输入发动机起动信号时,CPU131向电动机驱动器136输出使电动机110正转的信号,使发动机从爆发冲程起动,这时,由于曲轴113在排气冲程及吸气冲程中以低负荷进行旋转,所以,电动机110在活塞进入压缩冲程前达到与无负荷转速接近的几乎最大的转速,成为与饱和状态接近的转速。因此,曲轴113也在压缩冲程紧前处由电动机110以可能最大的转速旋转,积蓄在其旋转系统的惯性团体上的惯性能量也成为最大状态地冲入压缩行程。
因此,曲轴113在压缩行程中如图33(b)所示地由惯性能量(点划线)和电动机能量(实线)的和、即合成能量(粗实线)旋转。另外,如图33(b)所示,电动机110将其驱动能量分为助跑时和越过时2次施加给曲轴113。因此,与由1次能量赋予进行克服压缩行程的负荷的从前的电动机相比,可以高效地活用电动机能量。
这样,在发动机起动前先将活塞暂时返回到爆发行程,从其处起动发动机,由此,在发动内积蓄压缩反动能量,通过放出它而转换为曲轴113的惯性能量,利用旋转系统所具有的惯性能量,可以由比以前小的电动机转矩越过初次的压缩冲程。
在前述的情况下,在起动发动机时,首先,在从停止位置逆转到活塞的爆发行程后,使其正转,首先在将曲轴113正转到压缩冲程的中途、例如压缩冲程的上止点的跟前后,也可以使其逆转到爆发冲程。在该情况下,可以在压缩冲程中通过压缩燃烧室内的气体积蓄能量,可以通过放出其压缩能量,与电动机的能量一起使曲轴逆转。
这样,在起动时,首先使曲轴113正转而积蓄压缩能量,一边放出其一边使曲轴113逆转的方式,对2冲程发动机有效,这是因为在2冲程发动机中,在爆发冲程和压缩冲程之间有排气阀和排气阀即扫气阀同时打开的状态,由爆发冲程和压缩冲程之间的行程距离比4冲程发动机短,不能确保足够的助跑距离。
图35是表示这样地在首先使曲轴113正转到压缩冲程的中途,压缩了燃烧室内的气体后,利用压缩能量使曲轴113逆转了的情况的动作的图。图36是表示该情况中的能量变化的图。这样,通过在逆转动作前施加正转动作,在2冲程发动机的情况下也可以实现电动机110的小型化。
本发明不限定于上述实施例的形态,在不脱离其要旨的范围内可以进行种种变更。
例如,在上述实施例中,将二轮车用的发动机作为例子进行了说明,但也可以将本发明适用于四轮汽车用的发动机。另外,在上述的实施例中,是以直接连接在发动机的曲轴的电动机作例子进行了说明,但是,除了直接连接电动机外,也可适用于通过齿轮和电磁离合器驱动曲轴式的起动电动机。而且,电动机的种类也不限于上述那样的外转子式电动机,也可适用于内转子式电动机。
这样,根据本发明,在将活塞位置于排气冲程内的状态下使起动电动机正转使发动机起动,由此,在排气冲程和吸气冲程中在曲轴上积蓄惯性能量,可由惯性能量和起动电动机的旋转能量的合成能量越过压缩冲程,因此,可以降低用于越过压缩冲程的起动电动机的旋转能量。可以实现起动电动机的小型化和廉价化。
另外,即使在磁场中利用了磁铁的情况下,由于不需要过度地加强磁铁的磁力,所以可以降低旋转阻抗,可以谋求防止油耗率的提高和发动机输出功率的降低。
另外,在本发明的内燃机的起动装置中,通过使起动电动机逆转使活塞暂时移动到排气冲程内,即使在活塞停止在排气冲程以外的位置的情况下,也可以在使活塞位置于排气冲程内的状态下使内燃机起动。
并且,在以规定的逆转通电时间使起动电动机逆转后,停止规定时间的通电,使活塞位于排气冲程,其后,使起动电动机正转,使发动机起动,由此,在不特设凸轮轴传感器等的检测活塞位置的传感器的情况下,可以在使活塞位于排气冲程内的情况下使发动机起动,可以实现发动机起动装置的成本的降低。
另外,通过使用逆转通电时间表格和停止通电时间表格设定逆转通电时间和停止通电时间,可以对逆转通电时间和停止通电时间进行温度补偿和电压变动补偿,在环境变化时也可以稳定地将活塞返回排气冲程。
另外,根据本发明的控制装置,在使起动电动机以逆转通电时间t1逆转后,仅以停止通电时间t2停止通电,使曲轴惯性旋转,其后,在使电动机正转时,从起动电动机的换向位置脉冲信号算出电动机的旋转速度、速度变化率、旋转角度等,通过根据它们适当地反馈控制逆转通电时间t1和停止通电时间t2,在不特设检测活塞位置的传感器的情况下就可以将活塞返回到排气冲程内,进行发动机起动。因此,省去了凸轮轴传感器等的传感器类,可以谋求降低发动机起动装置的成本。
并且,在本发明的内燃机的起动装置中,通过将活塞运动到爆发冲程地使起动电动机逆转压缩燃烧室内的气体,利用其膨胀的反动力而使曲轴正转,在正转时,使积蓄在旋转系统上的惯性能量增大,由其惯性能量和起动电动机的合计能量进行第1次压缩冲程的越过,所以可以降低越过时供给起动电动机的旋转能量,可以实现起动电动机的小型化和低价格化。
另外,在使曲轴逆转到爆发冲程前,首先通过使曲轴逆转到接下来的压缩行程的中途,压缩燃烧室内的气体,将其反动用于逆转时的旋转力,由此,可以实现逆转动作所需的能量的降低和越过时所积蓄的惯性能量的增大。由此,在例如2冲程发动机那样的可逆转区间短的发动机的情况下也可以确实地由小型的起动电动机使发动机起动。
另外,可以提高进入压缩冲程前的旋转系统的旋转速度,可以在旋转系统上积蓄大的惯性能量。由此,由于可以稳定地越过压缩冲程,所以可以获得可靠性高的移动装置,另外,由于可以以更小的输出功率的电动机获得越过所需要的旋转速度、即惯性能量,所以可获得廉价的起动装置。
Claims (22)
1.内燃机的起动装置,其特征在于:它包括起动电动机和控制装置,该起动电动机与将排气行程作为起动开始位置的内燃机的曲轴相连接,该控制装置用于由上述曲轴的旋转惯性能量与上述起动电动机的旋转能量的合力越过压缩行程。
2.如权利要求1所述的内燃机的起动装置,其特征在于,上述控制装置使上述起动电动机逆转并返回到排气冲程。
3.如权利要求1所述的内燃机的起动装置,其特征在于,上述控制装置使上述起动发电机仅以规定的通电时间逆转而驱动上述曲轴逆转后,通过使上述曲轴以规定的停止通电时间惯性旋转而使上述内燃机的活塞位于排气冲程,其后,使上述起动发动机正转而使上述内燃机起动。
4.如权利要求3所述的内燃机的起动装置,其特征在于,上述起动装置上还设有存储了逆转通电时间表格及停止通电时间表格的存储装置,上述逆转通电时间表格是将温度和电源电压的至少一方作为参数设定上述逆转通电时间,上述停止通电时间表格是将温度作为参数设定上述停止通电时间。
5.如权利要求3所述的内燃机的起动装置,其特征在于,它包括从温度和电源电压算出上述逆转通电时间的逆转通电时间算出装置和从温度算出上述停止通电时间的停止通电时间算出装置。
6.如权利要求1所述的内燃机的起动装置,其特征在于,它包括:电动机旋转速度算出装置,它根据伴随与内燃机的曲轴相连接的起动电动机的旋转而输出的旋转脉冲信号算出上述起动电动机的旋转速度;电动机旋转角度算出装置,它根据上述旋转脉冲信号算出上述起动电动机的旋转角度;电动机逆转通电指示装置,它使上述起动电动机以规定的通电时间逆转;逆转量补正装置,它根据上述起动电动机的旋转速度补正上述曲轴的逆转通电时间;电动机停止通电指示装置,它在逆转驱动上述曲轴后以规定的停止通电时间停止对上述起动电动机通电,使上述曲轴惯性旋转,使上述内燃机的活塞位于排气冲程;惯性旋转量补正装置,它根据上述起动电动机的旋转速度及旋转角度补正上述曲轴的惯性旋转量;电动机正转开始指示装置,它在上述停止通电时间结束后,从上述活塞位于排气冲程的状态使上述起动电动机正转,使上述内燃机起动。
7.如权利要求6所述的内燃机的起动装置,其特征在于,上述逆转量补正装置将从上述起动电动机的旋转速度算出的旋转速度变化率与预定的基准值比较,在上述变化率为上述基准值以下时,提高上述起动电动机的目标旋回速度而增加上述曲轴的惯性能量,在上述变化率超过了上述基准值时,降低上述起动电动机的目标旋转速度,使上述曲轴的惯性能量减少。
8.如权利要求6或7所述的内燃机的起动装置,其特征在于,上述逆转量补正装置也可以在上述起动电动机的旋转速度达到了目标旋转速度时,即使在上述逆转通电时间也停止对上述起动电动机的通电,在上述起动电动机的旋转速度在上述逆转通电时间内未达到目标旋转速度时,延长上述逆转通电时间,继续对上述起动电动机通电。
9.如权利要求6~8中的任何一项所述的内燃机的起动装置,其特征在于,上述逆转量补正装置,在上述起动电动机的旋转速度在上述逆转通电时间内成为规定下限值时,即使是上述逆转通电时间内也停止对上述起动电动机通电。
10.如权利要求6~9中的任何一项所述的内燃机的起动装置,其特征在于:上述惯性旋转量补正装置,在上述起动电动机的通电时间所产生的旋转角度超过了规定的逆转基准角度时,即使在停止通电时间内也使上述停止通电时间结束,由上述电动机正转开始装置使上述起动电动机正转,在旋转角度为上述逆转规定角度以下时,在上述起动电动机的转速为规定值以下时,即使为上述停止通电时间内,也使上述停止通电时间暂时终止,由上述电动机逆转通电装置再度使上述起动电动机逆转。
11.如权利要求6~10中的任何一项所述的内燃机的起动装置,其特征在于:上述惯性旋转量补正装置也可以在从上述起动电动机的旋转速度的算出的转速降低率越过了规定上限值时,即使在上述停止通电时间内,也使上述停止通电时间终止,由上述电动机正转开始装置使上述起动电动机正转。
12.如权利要求1所述的内燃机的起动装置,其特征在于,它包括:与内燃机的曲轴连接的起动电动机;输出上述起动电动机的换向位置脉冲信号的换向位置检测装置;以如下方式控制上述起动电动机的控制装置,该方式为,通过使上述起动电动机逆转到活塞的爆发冲程内来压缩燃烧室的内气体,积蓄由其压缩反动产生的正转能量,在该能量上附加由上述起动电动机产生的旋转能量而在上述曲轴周围的旋转系统上积蓄惯性能量,从而越过压缩冲程,上述控制装置,在使上述起动电动机逆转时,根据由上述换向位置检测装置输出的脉冲信号的脉冲间隔的变化检测上述曲轴的旋转方向。
13.如权利要求12所述的内燃机的起动装置,其特征在于,上述控制装置也可以在由上述换向位置检测装置输出的脉冲信号的脉冲间隔比规定值长时,判定为活塞到达了爆发冲程。
14.如权利要求1所述的内燃机的起动装置,其特征在于,它包括:起动电动机,与内燃机的曲轴相连接;曲轴角度传感器,它检测上述曲轴的角度;控制装置,它以如下的方式控制上述起动电动机,该方式为:通过将上述起动电动机逆转到活塞的爆发冲程内来压缩燃烧室内的气体,积蓄由其压缩反动带来的正转能量,在该能量上附加上述起动电动机的旋转能量,从而在上述曲轴周围的旋转系统上积蓄惯性能量;由此超过压缩冲程,上述控制装置,在使上述起动电动机逆转时,根据由上述曲轴角度检测出的曲轴角度检测上述活塞到达了爆发冲程。
15.如权利要求14所述的内燃机的起动装置,其特征在于,上述控制装置也可以根据由上述曲轴角度检测出的曲轴角度决定上述曲轴的正转通电开始。
16.如权利要求1所述的内燃机的起动装置,其特征在于,它包括:与内燃机的曲轴连结的起动电动机;检测上述内燃机的凸轮位置的凸轮轴传感器;控制装置,它以如下方式控制上述起动电动机,该方式为:通过使上述起动电动机逆转到活塞的爆发行程内来压缩燃烧室内的气体,积蓄由其压缩反动带来的正转能量,在该能量上附加上述起动电动机的旋转能量,在上述曲轴的周围的旋转系统上积蓄惯性能量,由此越过压缩冲程,上述控制装置,在使上述起动电动机逆转时,根据来自上述凸轮轴传感器的信号检测上述活塞到达了爆发冲程的情况。
17.如权利要求16所述的内燃机的起动装置,其特征在于,上述控制装置根据由上述凸轮轴传感器检测出的曲轴角度决定上述曲轴的正转通电开始。
18.如权利要求12~17中任一项所述的内燃机的起动装置,其特征在于,上述控制装置在对上述起动电动机停止逆转通电后,在使上述曲轴规定时间惯性旋转后进行正转通电。
19.如权利要求12~18中任一项所述的内燃机的起动装置,其特征在于,上述控制装置在检测出了上述曲轴的旋转方向由于爆发冲程中的压缩反作用力转换为正转时开始正转通电。
20.如权利要求12~19中任何一项所述的内燃机的起动装置,其特征在于,在将上述起动电动机逆转到活塞的爆发冲程内前,使其正转到压缩冲程内。
21.如权利要求1所述的内燃机的起动装置,其特征在于,在内燃机起动时由曲轴的旋转惯性能量和起动电动机的旋转能量的合力越过压缩冲程的内燃机中,上述起动电动机与上述内燃机的曲轴相连接,并且可以根据旋转速度转换其特性。
22.如权利要求1所述的内燃机的起动装置,其特征在于,上述起动电动机具有比上述内燃机的最大旋转负荷小的输出转矩。
Applications Claiming Priority (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP350579/1998 | 1998-12-09 | ||
| JP35058198 | 1998-12-09 | ||
| JP350580/1998 | 1998-12-09 | ||
| JP35057998 | 1998-12-09 | ||
| JP35058098 | 1998-12-09 | ||
| JP35057898 | 1998-12-09 | ||
| JP350577/1998 | 1998-12-09 | ||
| JP35057798 | 1998-12-09 | ||
| JP350581/1998 | 1998-12-09 | ||
| JP350578/1998 | 1998-12-09 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1294658A CN1294658A (zh) | 2001-05-09 |
| CN1126866C true CN1126866C (zh) | 2003-11-05 |
Family
ID=27531298
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN99804328A Expired - Fee Related CN1126866C (zh) | 1998-12-09 | 1999-12-09 | 内燃机的起动装置 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP1055816A4 (zh) |
| JP (1) | JP4230116B2 (zh) |
| CN (1) | CN1126866C (zh) |
| ID (1) | ID27890A (zh) |
| TW (1) | TW432167B (zh) |
| WO (1) | WO2000034649A1 (zh) |
Families Citing this family (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4076108B2 (ja) * | 1999-04-23 | 2008-04-16 | 本田技研工業株式会社 | エンジン始動装置 |
| EP1321667A4 (en) * | 2000-09-28 | 2006-12-27 | Mitsuba Corp | ENGINE STARTER |
| JP3824132B2 (ja) * | 2000-10-26 | 2006-09-20 | 本田技研工業株式会社 | エンジン始動制御装置 |
| JP2002156205A (ja) * | 2000-11-20 | 2002-05-31 | Mitsuba Corp | 回転角度検出装置 |
| JP4039604B2 (ja) * | 2001-05-09 | 2008-01-30 | 本田技研工業株式会社 | 小型二輪車用のエンジン始動装置 |
| JP4859293B2 (ja) * | 2001-07-09 | 2012-01-25 | 株式会社日本自動車部品総合研究所 | エンジンの始動装置 |
| JP3969641B2 (ja) * | 2002-05-22 | 2007-09-05 | 本田技研工業株式会社 | エンジン始動装置 |
| JP4001330B2 (ja) * | 2002-06-27 | 2007-10-31 | 本田技研工業株式会社 | エンジン始動装置 |
| JP4082578B2 (ja) * | 2002-10-04 | 2008-04-30 | 本田技研工業株式会社 | エンジン始動制御装置 |
| JP4166160B2 (ja) * | 2004-01-19 | 2008-10-15 | トヨタ自動車株式会社 | 内燃機関を始動するための回転電機の制御装置 |
| JP4254651B2 (ja) * | 2004-08-05 | 2009-04-15 | トヨタ自動車株式会社 | ディーゼルエンジンの自動停止・始動制御方法及びディーゼルエンジンの自動停止・始動制御システム |
| JP4682966B2 (ja) * | 2006-11-06 | 2011-05-11 | 国産電機株式会社 | エンジン始動方法及び装置 |
| FR2912190B1 (fr) * | 2007-02-07 | 2013-06-14 | Peugeot Citroen Automobiles Sa | Procede de demarrage du moteur thermique d'un vehicule automobile hybride |
| JP4880520B2 (ja) * | 2007-05-28 | 2012-02-22 | ヤマハモーターエレクトロニクス株式会社 | 発電制御装置及び鞍乗型車両 |
| US8561588B2 (en) * | 2008-03-07 | 2013-10-22 | GM Global Technology Operations LLC | Engine stop/start system and method of operating same |
| CN101457700B (zh) * | 2008-10-17 | 2011-05-11 | 奇瑞汽车股份有限公司 | 一种确定发动机曲轴位置的方法 |
| JP5752917B2 (ja) * | 2010-10-29 | 2015-07-22 | 新電元工業株式会社 | エンジン始動装置 |
| US20130233268A1 (en) * | 2010-11-08 | 2013-09-12 | Toyota Jidosha Kabushiki Kaisha | Engine starting apparatus |
| DE102011075221A1 (de) * | 2011-05-04 | 2012-11-08 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Starten einer Verbrennungskraftmaschine |
| JP5708347B2 (ja) * | 2011-07-29 | 2015-04-30 | 株式会社デンソー | 単気筒エンジンの行程判別装置 |
| JP5929342B2 (ja) * | 2012-03-12 | 2016-06-01 | 株式会社デンソー | 車両の始動制御装置 |
| CN102645335B (zh) * | 2012-05-11 | 2014-08-20 | 天津工业大学 | 定位六缸发动机上止点的方法 |
| WO2015187346A1 (en) * | 2014-06-02 | 2015-12-10 | Rk Transportation Solutions Llc | Electromagnetic rotor drive assembly |
| TWI658202B (zh) * | 2014-08-01 | 2019-05-01 | 義大利商比雅久股份有限公司 | 發動內燃引擎的方法 |
| JP6319148B2 (ja) * | 2015-03-17 | 2018-05-09 | トヨタ自動車株式会社 | 多気筒内燃機関の制御装置 |
| TWI560363B (en) * | 2015-07-28 | 2016-12-01 | Sanyang Motor Co Ltd | Methods for controlling engines starting and stop running |
| ITUB20152786A1 (it) * | 2015-08-03 | 2017-02-03 | Piaggio & C Spa | Procedimento per la gestione del riavvio di un motore a combustione interna in un sistema start and stop |
| JP6108568B1 (ja) * | 2015-09-28 | 2017-04-05 | 本田技研工業株式会社 | 鞍乗型車両のエンジン始動制御装置 |
| CN105781758B (zh) * | 2016-03-02 | 2018-07-13 | 重庆亘富软件开发有限公司 | 用于发动机反向定位减压的启动方法 |
| DE102016205450A1 (de) * | 2016-04-01 | 2017-10-19 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung einer Brennkraftmaschine |
| CN105781845B (zh) * | 2016-04-26 | 2018-04-20 | 上海渝癸德信息技术服务中心 | 一体化启动发电控制装置及控制方法 |
| US10731620B2 (en) | 2017-10-03 | 2020-08-04 | Polaris Industries Inc. | Battery key, starter and improved crank |
| CN107947462B (zh) * | 2017-11-28 | 2024-09-17 | 浙江力俭新能源科技有限公司 | 一种起动发电机 |
| JP6752192B2 (ja) * | 2017-11-30 | 2020-09-09 | 本田技研工業株式会社 | エンジン始動装置及びエンジン始動装置のエンジン始動方法 |
| DE102017222546A1 (de) * | 2017-12-13 | 2019-06-13 | Robert Bosch Gmbh | Kolbenpumpe zur Förderung von Druckmittel in einem Druckmittelkreis |
| US10408184B1 (en) * | 2018-05-01 | 2019-09-10 | GM Global Technology Operations LLC | Brushless electric starter system with closed-loop speed synchronization control methodology |
| CN109695528A (zh) * | 2019-01-31 | 2019-04-30 | 上海概胜贸易商行 | 内燃机起动电机从反转到正转判断条件的方法 |
| CN111219280B (zh) * | 2019-04-17 | 2022-03-15 | 株式会社电装 | 发动机起动系统及其控制方法 |
| CN111337275B (zh) * | 2020-02-25 | 2022-03-22 | 威马智慧出行科技(上海)有限公司 | 车载悬架定位误差检测方法、装置、存储介质及电子设备 |
| CN111425324B (zh) * | 2020-03-31 | 2021-10-19 | 扬州翊翔航空科技有限公司 | 一种无人机用微型混合动力系统的起动控制方法 |
| JP7358021B2 (ja) | 2021-02-24 | 2023-10-10 | 東芝三菱電機産業システム株式会社 | 電力変換装置 |
| CN113353055B (zh) * | 2021-07-27 | 2022-10-25 | 哈尔滨东安汽车发动机制造有限公司 | 一种具备发动机起停控制功能的电机控制器 |
| WO2023079686A1 (ja) * | 2021-11-05 | 2023-05-11 | ヤマハ発動機株式会社 | ストラドルドビークル |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02286874A (ja) * | 1989-04-28 | 1990-11-27 | Mitsubishi Motors Corp | レシプロエンジンの始動性向上装置 |
| US5219397A (en) * | 1991-04-02 | 1993-06-15 | Globe-Union Inc. | Reduced starting load system for an automobile engine |
| JP3351042B2 (ja) * | 1993-09-02 | 2002-11-25 | 株式会社デンソー | 車両用内燃機関始動装置 |
| DE4439849A1 (de) * | 1994-11-08 | 1996-05-09 | Bosch Gmbh Robert | Verfahren und Vorrichtung zum Starten einer Brennkraftmaschine |
| JPH09151833A (ja) * | 1995-12-01 | 1997-06-10 | Suzuki Motor Corp | スタータ装置のスタータモータ保護装置 |
| US5713320A (en) * | 1996-01-11 | 1998-02-03 | Gas Research Institute | Internal combustion engine starting apparatus and process |
| DE19741294A1 (de) * | 1997-09-19 | 1999-03-25 | Bosch Gmbh Robert | Antrieb eines Kraftfahrzeuges |
-
1999
- 1999-12-09 ID IDW20001742A patent/ID27890A/id unknown
- 1999-12-09 EP EP99959719A patent/EP1055816A4/en not_active Withdrawn
- 1999-12-09 WO PCT/JP1999/006902 patent/WO2000034649A1/ja active Application Filing
- 1999-12-09 CN CN99804328A patent/CN1126866C/zh not_active Expired - Fee Related
- 1999-12-09 JP JP2000587073A patent/JP4230116B2/ja not_active Expired - Lifetime
- 1999-12-24 TW TW088122895A patent/TW432167B/zh not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| JP4230116B2 (ja) | 2009-02-25 |
| CN1294658A (zh) | 2001-05-09 |
| ID27890A (id) | 2001-05-03 |
| EP1055816A4 (en) | 2007-01-10 |
| EP1055816A1 (en) | 2000-11-29 |
| WO2000034649A1 (fr) | 2000-06-15 |
| TW432167B (en) | 2001-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1126866C (zh) | 内燃机的起动装置 | |
| CN1093803C (zh) | 混合型车用控制装置 | |
| CN1044538C (zh) | 动车发电系统 | |
| CN1063887C (zh) | 高效率的电机装置及电机的控制方法 | |
| CN1252385C (zh) | 内燃机用点火装置的点火时刻控制方法和点火时刻控制装置 | |
| CN1134588C (zh) | 发动机自动启动停止控制的设备和方法 | |
| CN1796755A (zh) | 设备的温度控制装置 | |
| CN1065684C (zh) | 具有电压调节器的复合式交流发电机 | |
| CN1042994C (zh) | 直流-直流换能器电路及使用该电路的感性负载驱动装置 | |
| CN1084547C (zh) | 电动机控制装置及具有该控制装置的电动机装置 | |
| CN1230321C (zh) | 通过电动机转矩制动的车辆和控制车辆的方法 | |
| CN1122356C (zh) | 同步电动机驱动方法、压缩机驱动方法、用于这种方法的装置和无刷电动机驱动装置 | |
| CN1237688C (zh) | 电动机、电动车辆和混合电动车辆 | |
| CN1285832C (zh) | 柴油发动机 | |
| CN1969118A (zh) | 内燃机的控制装置 | |
| CN1946923A (zh) | 内燃机的控制装置 | |
| CN1571265A (zh) | 电动机驱动装置 | |
| CN1336879A (zh) | 动力输出装置、混合车辆及其控制方法 | |
| CN1819441A (zh) | 用于计算/控制发电力矩的方法和设备 | |
| CN1944134A (zh) | 混合动力车辆的发动机启动控制装置 | |
| CN1834434A (zh) | 缸内喷射式内燃机的控制装置 | |
| CN1428256A (zh) | 混合驱动式车辆的运行控制装置及其车辆 | |
| CN1816689A (zh) | 内燃机的进气量控制系统以及控制系统 | |
| CN1745244A (zh) | 内燃机的控制装置 | |
| CN101037972A (zh) | 内燃机的控制装置和方法以及发动机控制单元 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| BB1A | Publication of application | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20031105 Termination date: 20100111 |