CN108737687B - 图像处理装置、图像处理方法和存储介质 - Google Patents
图像处理装置、图像处理方法和存储介质 Download PDFInfo
- Publication number
- CN108737687B CN108737687B CN201811048315.8A CN201811048315A CN108737687B CN 108737687 B CN108737687 B CN 108737687B CN 201811048315 A CN201811048315 A CN 201811048315A CN 108737687 B CN108737687 B CN 108737687B
- Authority
- CN
- China
- Prior art keywords
- pixel
- edge
- value
- data
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



























































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/40—Picture signal circuits
- H04N1/409—Edge or detail enhancement; Noise or error suppression
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/40—Picture signal circuits
- H04N1/409—Edge or detail enhancement; Noise or error suppression
- H04N1/4092—Edge or detail enhancement
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/40—Picture signal circuits
- H04N1/405—Halftoning, i.e. converting the picture signal of a continuous-tone original into a corresponding signal showing only two levels
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/46—Colour picture communication systems
- H04N1/56—Processing of colour picture signals
- H04N1/60—Colour correction or control
- H04N1/6002—Corrections within particular colour systems
- H04N1/6008—Corrections within particular colour systems with primary colour signals, e.g. RGB or CMY(K)
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Image Processing (AREA)
- Facsimile Image Signal Circuits (AREA)
Abstract
本发明提供一种图像处理装置、图像处理方法和存储介质。在将图像的劣化抑制到最小的同时减少边缘部分中的锯齿。该图像处理装置提供:确定单元,其被构造为由输入图像数据确定对象的边缘;被构造为生成用于校正构成所述边缘的像素的像素值的边缘校正数据的单元;网屏数据生成单元,其被构造为通过对所述输入图像数据进行网屏处理来生成网屏数据;以及图像组合单元,其被构造为生成输出图像数据,在所述输出图像数据中,存在于所述网屏数据中的所述边缘处的网点被偏移至所述对象内侧。
Description
本申请是申请日为2015年8月20日、申请号为201510516334.9、发明名称为“图像处理装置及图像处理方法”的发明专利申请的分案申请。
技术领域
本发明涉及减少图像数据的边缘部分中的锯齿的技术。
背景技术
传统上,在图像形成装置中,已提出了减少在字符等的边缘部分中出现的称为锯齿的参差(ruggedness)的几种技术。发生锯齿的原因有很多种,但是可以想到主要原因在于由低分辨率打印机引起的像素的参差以及伴随网屏处理的参差。
作为改善伴随网屏处理的参差的技术,例如,存在如下的技术,即由网屏处理前的图像数据生成校正数据并且将校正数据添加到网屏处理后的图像数据的边缘部分从而据此对边缘部分进行修边(例如,参见日本特开第2006-295877号公报)。在该技术中,确定边缘部分是否是应当进行边缘校正处理的边缘部分,并且在边缘部分是需要边缘校正处理的边缘部分的情况下,将校正数据与网屏处理后的图像数据比较,然后输出值较大的数据,由此,减少由网屏处理引起的锯齿。另外,利用该技术,尽管结构简单,但是之前描述的由低分辨率打印机引起的像素的参差也同时减少。
日本特开第2006-295877号公报的方法是如下的方法,即主要由半点(half dot)构成的校正数据与主要由全点(full dot)构成的网屏处理后的图像数据被组合,然后被输出到边缘部分。由此,边缘部分由不同点(即,半点和全点)构成,并且存在半点被附近的全点吸收的情况,因此,边缘部分中的锯齿的减少程度小。原因在于在电子照相方式的情况下在显影时在校正数据的浅潜像与网屏处理后的图像数据的深潜像相邻的位置处,调色剂被拉到潜像的更深位置。其结果是,在浅潜像图像部分难以进行显影,因此,存在边缘部分中的锯齿的减少程度低的情况。
发明内容
根据本发明的一种图像处理装置包括:确定单元,其被构造为由输入图像数据确定对象的边缘;被构造为生成用于校正构成所述边缘的像素的像素值的边缘校正数据的单元;网屏数据生成单元,其被构造为通过对所述输入图像数据进行网屏处理来生成网屏数据;以及图像组合单元,其被构造为生成输出图像数据,在所述输出图像数据中,存在于所述网屏数据中的所述边缘处的网点被偏移至所述对象的内侧。
根据以下参照附图对示例性实施例的描述,本发明的其他特征将变得清楚。
附图说明
图1是示出根据第一实施例的MFP的结构的概略框图;
图2是示出打印机单元的详情的图;
图3是示出根据第一实施例的图像处理单元的内部结构的框图;
图4是示出边缘信息生成单元的内部结构的框图;
图5是示出混合数据转换处理的流程的流程图;
图6是示出图6A与图6B之间的关系的图,图6A和图6B是示出边缘确定处理的流程的流程图;
图7是示出三个以上的值的边缘确定处理的详情的流程图;
图8是说明边缘确定处理的具体示例的图;
图9是示出关注像素与边缘方向确定单元参照的四个像素之间的位置关系的图;
图10是示出边缘方向确定处理的流程的流程图;
图11A、图11B和图11C示出了在边缘校正数据生成处理中使用的查找表的示例;
图12是示出由网屏处理单元进行的网屏处理的流程的流程图;
图13A到图13E是说明相位被偏移的抖动矩阵的图;
图14A到图14F是通过比较来说明网屏处理单元的网屏处理结果以及相位偏移的网屏处理单元的网屏处理结果的图;
图15是示出图15A与图15B之间的关系的图,图15A和图15B是示出根据第一实施例的图像组合处理的流程的流程图;
图16是说明参照像素的图;
图17A到图17F是说明不利用相位偏移的网屏处理的结果而进行边缘校正处理的情况的示例的图;
图18A到图18F是说明通过应用第一实施例进行边缘校正处理的情况的示例的图;
图19A到图19D是说明在根据第一实施例的边缘校正处理后图像中的各像素的曝光量的图;
图20是示出根据第二实施例的图像处理单元的内部结构的框图;
图21是示出根据第二实施例的边缘信息生成单元的内部结构的框图;
图22是示出根据第二实施例的图像组合处理的流程的流程图;
图23A到图23G是说明通过利用第二实施例进行边缘校正处理的情况的示例的图;
图24是示出在预定周边区域是5×5像素的区域的情况下校正率表的特性的示例的图;以及
图25A到图25G是示出第二实施例中的边缘校正处理的结果的示例的图。
具体实施方式
在下文中,通过利用附图来说明用于实现本发明的各方面。以下实施例中示出的结构仅是示例性的并且本发明不限于示意性地示出的结构。
[第一实施例]
在本实施例中,通过以像复印机、打印机、传真机等具有多个功能的、采用电子照相方式的数字多功能外围设备(下文中,MFP)作为图像形成装置的示例来给出说明。然而,可以将本发明应用于利用其它处理的装置(诸如采用例如喷墨机构的装置),并不限于以上。
图1是示出根据本实施例的MFP 100的结构的概略框图。MFP 100包括扫描器单元101、控制器102、打印机单元103以及操作单元104。
扫描器单元101光学读取原稿的图像并且获取该图像作为图像数据。
控制器102包括CPU、ROM和RAM并且对由扫描器单元101读取的图像数据等进行预定的图像处理。已进行了图像处理的图像数据被存储在控制器102内的RAM中。
打印机单元103根据针对已进行了图像处理的图像数据指定的打印设置条件,通过电子照相方式在打印片材上形成图像。假设本实施例的打印机103可以通过PWM调节激光的曝光量,并且输入针对各像素具有4比特值的图像数据。
操作单元104是用户进行各种操作的用户接口。用户经由操作单元104对要打印的图像数据进行各种打印条件的设置等。
管理图像数据的服务器108、指示MFP 100进行打印等的个人计算机(PC)107经由网络106连接到MFP 100。在通过服务器108或PC 107指示控制器102进行打印的情况下,控制器102将从服务器108或PC 107发送的图像数据光栅化,将该图像数据转换为与打印机单元103兼容的图像数据(位图数据),并且将该图像数据存储在RAM中。
图2是示出打印机单元103的详情的图,示出了用于通过电子照相方式在打印介质上形成图像的四色鼓的机构。
在控制器102内再次进行稍后描述的用于打印的图像处理后,临时存储在控制器102内的RAM中的位图数据和属性数据被发送到打印机单元103。在打印机单元103中,数据通过打印机单元103内的PWM控制被转换成脉冲信号,并且被转换成激光照射单元中的四种颜色(即,青色(C)、品红色(M)、黄色(Y)及黑色(K))的照射激光。然后,利用照射激光来照射各颜色的感光体201,由此,在各感光体上形成静电潜像。
打印机单元103通过利用从调色剂盒202供给的调色剂来在各感光体上进行调色剂显影,并且将使得在各感光体上可视的调色剂图像一次转印到中间转印带203上。中间转印带203按图2中的顺时针方向旋转,并且在通过片材给送输送路径205从片材盒204供给并发送的打印片材到达二次转印位置206时,调色剂图像从中间转印带203被转印到打印片材上。在转印有图像的打印片材上,调色剂由于施加的压力和热而定影在定影单元207中,并且在打印片材通过片材排出输送路径被输送后,被排出到面朝下的中心托盘208或面朝上的侧托盘209。
接着,说明在控制器102内进行的用于打印的图像处理。图3是示出作为进行图像处理的功能单元的图像处理单元的内部结构的框图。由控制器102内的CPU在将ROM中保持的控制程序展开到RAM上之后执行所述程序,来实现以下要描述的图像处理单元300中的各项处理。根据本实施例的图像处理单元300包括色彩校正单元301、边缘信息生成单元302、伽马校正单元303、边缘校正数据生成单元304、网屏处理单元305、相位偏移网屏处理单元306以及图像组合单元307。
色彩校正单元301对从控制器102内的RAM获取的图像数据(位图数据)进行色彩校正处理。具体地,色彩校正单元301通过利用色彩转换LUT或通过进行矩阵计算,来将图像数据转换为由CMYK四种颜色表现浓度的CMYK色彩空间中的图像数据(图像信号)。转换后的图像数据针对各颜色中的各像素具有8比特(0到255)的值。
边缘信息生成单元302针对CMYK的各颜色生成边缘信息。边缘信息是针对各像素具有3比特值的数据。高位的一比特表示像素是否是构成边缘的像素(下文中为边缘像素),并且在像素是边缘像素的情况下比特为“1”,在像素不是边缘像素的情况下,比特为“0”。低位的两比特表示边缘的方向(边缘方向):向上方向由“00”表示,向下方向由“01”表示,向右方向由“10”表示,向左方向由“11”表示。生成的边缘信息在稍后描述的图像组合单元307切换处理的情况下被参照。
伽马校正单元303通过利用一维查找表来进行校正输入的CMYK图像数据的处理(伽马校正处理),使得在图像被转印到打印片材的情况下将得出期望的浓度特性。已被进行伽马校正处理的图像数据被发送到边缘校正数据生成单元304、网屏处理单元305、相位偏移网屏处理单元306、以及图像组合单元307。
边缘校正数据生成单元304由输入图像数据生成边缘部分的校正数据(下文中为边缘校正数据)。生成的边缘校正数据被发送到图像组合单元307。
网屏处理单元305通过对输入图像数据进行网屏处理生成网屏数据(半色调图像数据)。生成的网屏数据被发送到图像组合单元307。
相位偏移网屏处理单元306生成其中通过利用抖动矩阵(作为针对通过网屏处理单元305的输入图像数据而使用的抖动矩阵)来使相位偏移并且相位已被偏移的网屏数据。生成的相位偏移的网屏数据被发送到图像组合单元307。
图像组合单元307基于从边缘信息生成单元302接收的边缘信息以及伽马校正后的图像数据来进行稍后描述的图像组合处理。
<边缘信息生成处理>
接着,参照图4到图9来详细说明边缘信息生成单元302中的边缘信息生成处理。
图4是示出边缘信息生成单元302的内部结构的框图。边缘信息生成单元302包括混合数据转换单元401、边缘确定单元402、内侧确定单元403、边缘方向确定单元404以及确定结果综合单元405。在已被转换为CMYK色彩空间的图像数据被输入到边缘信息生成单元302的情况下,图像数据被发送到混合数据转换单元401。
混合数据转换单元401通过对针对以关注像素为中心的各预定参照区域(这里为5×5像素的区域)的输入图像数据进行混合数据转换处理,来生成在任意部分中混合CMYK的四种颜色的数据(下文中为混合数据)。图像数据内的各像素具有8比特值,但是在后续的处理中,8比特数据不是必须的,因此,在本实施例中,在舍去低位的两比特后进行转换处理。由此,能够缩小电路规模。稍后将描述混合数据转换处理的详情。生成的混合数据被发送到边缘确定单元402、内侧确定单元403、以及边缘方向确定单元404。
边缘确定单元402进行确定关注像素是否是应当被应用上述边缘校正数据的边缘像素的处理(边缘确定处理)。稍后将描述边缘确定处理的详情。边缘确定处理的结果作为边缘确定信号(例如,在关注像素是边缘像素的情况下取“1”而在关注像素是非边缘像素的情况下取“0”的1比特信号)被发送给确定结果综合单元405。
内侧确定单元403进行确定关注像素是否位于内侧的处理(内侧确定处理)。具体地,找到关注像素的8个周边像素的像素值的最大值,并且在关注像素的像素值大于或等于最大值的情况下,确定关注像素位于内侧。内侧确定处理的结果作为内侧确定信号(例如,在关注像素位于内侧的情况下取“1”而在关注像素不位于内侧的情况下取“0”的1比特信号)被发送给确定结果综合单元405。
边缘方向确定单元404进行以关注像素为基准来确定边缘的方向的处理(边缘方向确定处理)。具体地,将关注像素的像素值与位于关注像素的上、下、左或右的像素的像素值比较,并且在它们之间存在差别的情况下,确定边缘存在于该方向。边缘方向确定处理的结果作为边缘方向信号被发送给确定结果综合单元405。
确定结果综合单元405基于输入的边缘确定信号、内侧确定信号、以及边缘方向信号来生成上述的边缘信息。具体地,关于边缘信息的高位的一比特,在边缘确定处理中确定关注像素是边缘像素并且在内侧确定处理中确定关注像素位于内侧的情况下,设置“1”,并且在其他情况下,设置“0”。另外,针对边缘信息的低位的两比特,用边缘方向确定处理的结果来按照原样替代低位的两比特。以这种方式,针对各像素生成3比特边缘信息。
<混合数据转换处理>
说明由混合数据转换单元401进行的混合数据转换处理的详情。
图5是示出混合数据转换处理的流程的流程图。对构成CMYK图像数据中的上述参照数据(5×5像素的区域)的全部25个像素的各像素进行混合数据转换处理。
在步骤S501中,混合数据转换单元401通过求K的像素值DK与K的混合率MRK的积来获得K的像素值DK'。在这种情况下,混合率MRK是在0与15之间的范围内任意设置的值。基于此,确定是仅通过CMY的彩色色彩来生成混合数据还是通过包括非彩色的色彩K的色彩来生成混合数据。
在步骤S502中,混合数据转换单元401确定在步骤S501中获得的K的像素值DK'是否大于C的像素值DC。在像素值DK'大于像素值DC的情况下,处理进行到步骤S503。另一方面,在像素值DK'不大于像素值DC的情况下,处理进行到步骤S504。
在步骤S503中,混合数据转换单元401通过求在步骤S501中获得的K的像素值DK'与C的混合率MRC的积来获得C的像素值DC'。这里,混合率MRC像上述的混合率MRK一样也是在0与15之间的范围内任意设置的值,并且通过改变混合率MRC的值,能够针对要生成的混合数据控制C的比例。
在步骤S504中,混合数据转换单元401通过求C的像素值DC与上述混合率MRC的积来获得C的像素值DC'。
在步骤S505中,混合数据转换单元401确定在步骤S501中获得的K的像素值DK'是否大于M的像素值DM。在像素值DK'大于像素值DM的情况下,处理进行到步骤S506。另一方面,在像素值DK'不大于像素值DM的情况下,处理进行到步骤S507。
在步骤S506中,混合数据转换单元401通过求在步骤S501中获得的K的像素值DK'与M的混合率MRM的积来获得M的像素值DM'。这里,混合率MRM像上述的混合率MRK一样也是在0与15之间的范围内任意设置的值,并且通过改变混合率MRM的值,能够针对要生成的混合数据控制M的比例。
在步骤S507中,混合数据转换单元401通过求M的像素值DM与混合率MRM的积来获得M的像素值DM'。
在步骤S508中,混合数据转换单元401确定在步骤S501中获得的K的像素值DK'是否大于Y的像素值DY。在像素值DK'大于像素值DY的情况下,处理进行到步骤S509。另一方面,在像素值DK'不大于像素值DY的情况下,处理进行到步骤S510。
在步骤S509中,混合数据转换单元401通过求在步骤S501中获得的K的像素值DK'与Y的混合率MRY的积来获得Y的像素值DY'。这里,混合率MRY像上述的混合率MRK一样也是在0与15之间的范围内任意设置的值,并且通过改变混合率MRY,能够针对要生成的混合数据控制Y的比例。
在步骤S510中,混合数据转换单元401通过求Y的像素值DY与混合率MRY的积来获得Y的像素值DY'。
在步骤S511中,混合数据转换单元401求通过迄今进行的处理获得的DC'、DM'及DY'的和值,并且通过将求出的和值向右偏移对应于通过比特偏移量BS指定的比特数的量来求出针对各像素的混合数据[MIX]。
在步骤S512中,混合数据转换单元401确定在步骤S511中求出的混合数据[MIX]的值是否大于作为6比特值的最大值的63。在步骤S511求出的混合数据[MIX]的值大于63的情况下,处理进行到步骤S513。另一方面,在步骤S511求出的混合数据[MIX]的值不大于63的情况下,终止本处理。换言之,在步骤S511中求出的值被确定为混合数据[MIX]。
在步骤S513中,混合数据转换单元401将混合数据[MIX]的值改变为作为6比特值的上限值的63(裁切处理)。通常,MRC、MRM、MRY、MRK和比特偏移量BS被设置为使得[MIX]不超出63,但是为了即使在设置错误数值的情况下也确保操作,进行该裁切处理。
以上是混合数据转换处理的内容。这里,示出MRC为4、MRM为6、MRY为6、MRK为0并且BS为4、DC为5、DM为8、DY为10及DK为2的情况下的混合数据转换处理的具体示例。
首先,MRK为0,因此,DK'为0(步骤S501)。
接着,DK'为0并且DC为5,因此,处理进行到步骤S504(步骤S502中“否”)。
在步骤S504中,DC为5并且MRC为4,因此,DC'为20。
然后,DK'为0并且DM为8,因此,处理进行到步骤S507(步骤S505中“否”)。
在步骤S507中,DM为8并且MRM为6,因此,DM'为48。
然后,DK'为0并且DY为10,因此,处理进行到步骤S510(步骤S508中“否”)。
在步骤S510中,DY为10并且MRY为6,因此,DY'为60。
然后,在步骤S511中,首先,求出DC'、DM'及DY'的和值(20+48+60=128),并且根据BS=4将和值128向右偏移4比特。其结果是,获得8作为混合数据[MIX]的值。
在步骤S511获得的混合数据[MIX]的值(8)小于63(步骤S512中“否”),因此,混合数据[MIX]的最终值为8。
以这种方式,生成针对各像素具有6比特值的混合数据,其中在任意部分中混合CMYK的各色彩。然后,通过在后续处理中利用混合数据,使得能够进行不依赖要经历处理的色彩的边缘校正处理,其结果是,能够抑制在边缘部分中出现的伪色。
混合数据转换处理不限于上述方法,可以接受任意处理,只要该处理通过利用多个色彩生成混合数据即可。
另外,在上述步骤S511中,通过将各色彩的像素值D与预定混合率MR的积的和值向右偏移比特偏移量BS,来获得混合数据[MIX],但是还可以通过例如利用划分替代向右偏移来获得混合数据[MIX]。
<边缘确定处理>
接着,说明通过边缘确定单元402进行的边缘确定处理的详情。
图6A和图6B是示出边缘确定处理的流程的流程图。
在步骤S601中,边缘确定单元402针对由混合数据转换单元401生成的混合数据,求出上述参照区域内的总计九个像素(即,以关注像素为中心在宽度方向上3个像素且在高度方向上3个像素)中的最大像素值(最大值[MAX])。
在步骤S602中,边缘确定单元402针对由混合数据转换单元401生成的混合数据,求出上述参照区域内的总计九个像素(即,以关注像素为中心在宽度方向上3个像素且在高度方向上3个像素)中的最小像素值(最小值[MIN])。
在步骤S603中,边缘确定单元402通过从在步骤S601中求出的最大值[MAX]中减去在步骤S602中求出的最小值[MIN],来求出对比度值[CONT]。
在步骤S604中,边缘确定单元402将在步骤S603求出的对比度值[CONT]与边缘确定值[Sub]比较,并且确定是否对比度值[CONT]更大。这里,边缘确定值[Sub]是用于确定对象的边缘部分的阈值并且设置任意值,利用边缘确定值[Sub]能够确定部分是否是例如字符或线的边缘部分。在确定结果表示对比度值[CONT]大于边缘确定值[Sub]的情况下,处理进行到步骤S605。另一方面,在对比度值[CONT]不大于边缘确定值[Sub]的情况下,处理进行到步骤S617。
在步骤S605中,边缘确定单元402通过将在步骤S601中求出的最大值[MAX]与在步骤S602中求出的最小值[MIN]相加并且通过将获得的和除以2,来求出平均值[AVE]。
在步骤S606中,边缘确定单元402从上述参照区域内的总计九个像素(即,以关注像素为中心在宽度方向上3个像素且在高度方向上3个像素)中搜索最大值-最小值([MAX_MIN])。这里,最大值-最小值[MAX_MIN]是除了最大值[MAX]以外的大于或等于平均值[AVE]的像素值当中的最小值。
在步骤S607中,边缘确定单元402确定是否在步骤S606的搜索中找到最大值-最小值[MAX_MIN]。在找到了最大值-最小值[MAX_MIN]的情况下,处理进行到步骤S608。另一方面,在未找到最大值-最小值[MAX_MIN]的情况下,处理进行到步骤S609。
在步骤S608中,边缘确定单元402通过从在步骤S601中求出的最大值[MAX]中减去在步骤S606中求出的最大值-最小值[MAX_MIN],来求与最大值的差值[MAX_DIFF_MIN]。
在步骤S609中,边缘确定单元402将与最大值的差值[MAX_DIFF_MIN]设置为“0”,因为不存在最大值-最小值[MAX_MIN]。
在步骤S610中,边缘确定单元402从上述参照区域内的总计九个像素(即,以关注像素为中心在宽度方向上3个像素且在高度方向上3个像素)中搜索最小值-最大值[MIN_MAX]。这里,最小值-最大值[MIN_MAX]是除了最小值[MIN]以外的小于平均值[AVE]的像素值当中的最大值。
在步骤S611中,边缘确定单元402确定是否在步骤S610的搜索中找到了最小值-最大值[MIN_MAX]。在找到了最小值-最大值[MIN_MAX]的情况下,处理进行到步骤S612。另一方面,在未找到最小值-最大值[MIN_MAX]的情况下,处理进行到步骤S613。
在步骤S612中,边缘确定单元402通过从在步骤S611中找到的最小值-最大值[MIN_MAX]中减去在步骤S602中求出的最小值[MIN],来求出与最小值的差值[MIN_DIFF_MAX]。
在步骤S613中,边缘确定单元402将与最小值的差值[MIN_DIFF_MAX]设置为“0”,因为不存在最小值-最大值[MIN_MAX]。
在步骤S614中,边缘确定单元402确定是否既未找到上述的最大值-最小值[MAX_MIN]也未找到最小值-最大值[MIN_MAX]。在均未找到它们的情况下,处理进行到步骤S615。另一方面,在找到它们的任意一者的情况下,处理进行到步骤S616。
在处理进行到步骤S615的时间点,使得清楚既未找到最大值-最小值[MAX_MIN]也未找到最小值-最大值[MIN_MAX](步骤S614中“是”)并且对比度值[CONT]足够大(步骤S604中“是”)。因此,边缘确定单元402确定参照区域是其中像素值存在急剧变化(即,像素是需要边缘校正的边缘像素)的区域,因此将边缘确定信号设置为“1(开)”并且终止本处理。
在步骤S616中,边缘确定单元402在上述参照区域中存在三个以上像素值的情况下进行确定边缘是否是需要校正的边缘的处理(三个以上值的边缘确定处理)。三个以上值的边缘确定处理是期望检测在由于压缩处理等已劣化的字符或自然图像中存在的边缘的处理。图7是示出三个以上值的边缘确定处理的详情的流程图。在下文中,给出详细说明。
在步骤S701中,边缘确定单元402通过从在步骤S603中求出的对比度值[CONT]中减去与最大值的差值[MAX_DIFF_MIN]以及与最小值的差值[MIN_DIFF_MAX],来求出表示平均值附近的值的分布的方差值[DIFF]。
在步骤S702中,边缘确定单元402确定在步骤S701求出的方差值[DIFF]是否大于第一阈值[DiffTh_1]。该第一阈值是用于确定最大的最小值与最小的最大值之间的差是否足够大的阈值。由此,作为第一阈值,设置代表被期望检测为边缘的信号值差的值。期望将第一阈值设置为比边缘确定值[Sub]要小一点的值。在方差值[DIFF]大于第一阈值[DiffTh_1]的情况下,处理进行到步骤S704。另一方面,在方差值[DIFF]不大于第一阈值[DiffTh_1]的情况下,处理进行到步骤S703。
在步骤S703中,边缘确定单元402确定参照区域是像素值不存在急剧变化的区域,因为在步骤S701中求出的方差值[DIFF]不是足够大的值。换言之,边缘确定单元402确定像素是不需要边缘校正的非边缘像素,因此,将边缘确定信号设置为“0(关)”并且终止本处理。
在步骤S704中,边缘确定单元402确定上述与最大值的差值[MAX_DIFF_MIN]是否小于第二阈值[DiffTh_2]。稍后描述的第二阈值和第三阈值是用于确定与最大值的差值[MAX_DIFF_MIN]以及与最小值的差值[MIN_DIFF_MAX]是否足够小的阈值。与最大值的差值[MAX_DIFF_MIN]以及与最小值的差值[MIN_DIFF_MAX]是大的那部分是指存在变化的部分(诸如灰度部分)。不期望检测其中灰度的变化的斜率陡峭的部分作为边缘,因此,通过利用第二及第三阈值来进行确定。期望将第二及第三阈值设置为与第一阈值相比足够小的值。理由在于,第二及第三阈值越大,则其中存在对比度以及存在信号值的变化的部分越有可能被确定为边缘。在与最大值的差值[MAX_DIFF_MIN]小于第二阈值[DiffTh_2]的情况下,处理进行到步骤S705。另一方面,在与最大值的差值[MAX_DIFF_MIN]不小于第二阈值[DiffTh_2]的情况下,处理进行到步骤S707。
在步骤S705中,边缘确定单元402确定上述与最小值的差值[MIN_DIFF_MAX]是否小于第二阈值[DiffTh_2]。在与最小值的差值[MIN_DIFF_MAX]小于第二阈值[DiffTh_2]的情况下,处理进行到步骤S706。另一方面,在与最小值的差值[MIN_DIFF_MAX]不小于第二阈值[DiffTh_2]的情况下,处理进行到步骤S707。
在步骤S706中,边缘确定单元402确定参照区域是像素值存在急剧变化的区域,因为与最大值的差值[MAX_DIFF_MIN]以及与最小值的差值[MIN_DIFF_MAX]二者足够小。换言之,边缘确定单元402确定像素是需要边缘校正的边缘像素,因此将边缘确定信号设置为“1(开)”,然后处理进行到步骤S708。
在步骤S707中,边缘确定单元402确定参照区域是像素值不存在急剧变化的区域。换言之,边缘确定单元402确定像素是不需要边缘校正的非边缘像素,因此将边缘确定信号设置为“0(关)”,然后处理进行到步骤S708。
在步骤S708中,边缘确定单元402确定与最大值的差值[MAX_DIFF_MIN]是否小于第三阈值[DiffTh_3]。在与最大值的差值[MAX_DIFF_MIN]小于第三阈值[DiffTh_3]的情况下,处理进行到步骤S710。另一方面,在与最大值的差值[MAX_DIFF_MIN]不小于第三阈值[DiffTh_3]的情况下,处理进行到步骤S709。
在步骤S709中,边缘确定单元402确定与最小值的差值[MIN_DIFF_MAX]是否小于第三阈值[DiffTh_3]。在与最小值的差值[MIN_DIFF_MAX]小于第三阈值[DiffTh_3]的情况下,处理进行到步骤S710。另一方面,在与最小值的差值[MIN_DIFF_MAX]不小于第三阈值[DiffTh_3]的情况下,终止本处理。
在步骤S710中,边缘确定单元402确定参照区域是像素值存在急剧变化的区域,因为与最大值的差值[MAX_DIFF_MIN]以及与最小值的差值[MIN_DIFF_MAX]中的一者足够小。换言之,边缘确定单元402确定像素是需要边缘校正的边缘像素,因此将边缘确定信号设置为“1(开)”并且终止本处理。
在上述说明中,假设边缘确定值的数量、第一阈值的数量、第二阈值的数量、以及第三阈值的数量各自为1来给出了描述,但是还可以准备多个这些值并且根据需要选择和使用它们中的一者。例如,还可以进一步参照属性数据,并且在关注像素的属性是图像的情况下,分别地将边缘确定值和第一阈值切换为大于其他属性的值的值,并且将第二及第三阈值切换为较小的值。另外,在关注像素的属性是字符或线的情况下,还可以分别地将边缘确定值和第一阈值切换为小于其他属性的值的值,并且将第二及第三阈值切换为较大的值。通过进行这种切换,使得能够进行密切的控制,从而色彩和形状容易变复杂的图像属性不太可能受到校正影响,而色彩和形状容易变均匀的字符属性或线属性更可能受到校正影响。
以上是三值以上的边缘确定处理的内容。
说明返回到图6B中的流程图。
在步骤S617中,边缘确定单元402确定参照区域是像素值不存在急剧变化的区域,因为对比度值[CONT]小(步骤S604中“否”)。换言之,边缘确定单元402确定参照区域是由不需要边缘校正的非边缘像素构成的区域,因此,将边缘确定信号设置为“0(关)”并且终止本处理。
以上是边缘确定处理的内容。这里,通过利用图8来说明边缘确定处理的具体示例。图8示出被期望检测为边缘的3×3像素的图像801、以及不被期望检测为边缘的3×3像素的图像802。图像801和图像802具有相同对比度。
首先,图像801和图像802二者的最大值[MAX]是“40”(步骤S601)并且最小值[MIN]为“0”(步骤S602)。然后,图像801和图像802二者的对比度为“40”(步骤S603)。
然后,在边缘确定值[Sub]为“20”的情况下,针对这两者图像,处理进行到步骤S605(步骤S604中“是”)并且作为其平均值[AVE],针对这两者图像得出“20”。
在后续步骤中,在图像801的情况下不存在最大值-最小值[MAX_MIN](步骤S607中“否”),因此,与最大值的差值[MAX_DIFF_MIN]为“0”(步骤S609)。与此不同,在图像802的情况下,存在最大值-最小值[MAX_MIN](步骤S607中“是”),因此,作为与最大值的差值[MAX_DIFF_MIN],获得“10(=40-30)”(步骤S608)。
然后,在图像801的情况下,也不存在最小值-最大值[MIN_MAX](步骤S611中“否”),因此,与最小值的差值[MIN_DIFF_MAX]也为“0”(步骤S613)。与此不同,在图像802的情况下,存在最小值-最大值[MIN_MAX](步骤S611中“是”),因此,获得“18(=18-0)”作为与最小值的差值[MIN_DIFF_MAX](步骤S612)。
通过迄今的处理,针对图像801,既不存在最大值-最小值[MAX_MIN]也不存在最小值-最大值[MIN_MAX](步骤S614中“是”),因此,边缘确定信号被设置为开(步骤S615)。换言之,图像801被确定为边缘部分。另一方面,针对图像802,存在最大值-最小值[MAX_MIN]和最小值-最大值[MIN_MAX],因此,作为结果,处理进行到三值以上的边缘确定处理。
在针对图像802的三值以上的边缘确定处理中,首先,得出方差值[DIFF](步骤S701)。这里,对比度[CONST]为“40”,与最大值的差值[MAX_DIFF_MIN]为“10”,与最小值的差值[MIN_DIFF_MAX]为“18”,因此,方差值[DIFF]为“12”。
然后,在步骤S702的第一阈值[DiffTh_1]为“16”的情况下(步骤S702中“否”),边缘确定信号被设置为关(步骤S703)。换言之,图像802被确定为不是边缘部分。
如上所述,在图6A和图6B的流程图中,在参照区域内存在两个以下像素值的简单区域的情况下,通过仅利用对比度值[CONT]来确定参照区域是否是需要校正的边缘部分。然而,本方面并不限于这种方面。例如,还可以不考虑参照区域内的状态,仅基于参照区域内的对比度值是否足够大来确定参照区域是否是由需要边缘校正的边缘构成的区域。所需要的是如下的能力,即适当确定是否应当对边缘部分应用边缘校正处理。
(边缘方向确定处理)
接着,说明由边缘方向确定单元404进行的边缘方向确定处理的详情。
图9是示出由边缘方向确定单元404参照的关注像素与四个像素之间的位置关系的图。在图9中,分别地,关注像素由[tr_pix]表示,关注像素的左邻接像素由[left_pix]表示,关注像素的右邻接像素由[right_pix]表示,关注像素的上邻接像素由[up_pix]表示,关注像素的下邻接像素由[down_pix]表示。图10是示出边缘方向确定处理的流程的流程图。
在步骤S1001中,边缘方向确定单元404将关注像素的像素值与关注像素的上邻接像素的像素值比较,并且确定关注像素的像素值是否更大。在关注像素的像素值更大的情况下,处理进行到步骤S1002。另一方面,在关注像素的像素值不是更大的情况下,处理进行到步骤S1003。
在步骤S1002中,边缘方向确定单元404生成表示边缘位于关注像素之上的边缘方向信号[Edge_Dir]。在本实施例中,边缘方向信号[Edge_Dir]是2比特信号并且“00”被设置为表示边缘位于关注像素之上的值。生成的边缘方向信号[Edge_Dir]被发送到确定结果综合单元405并且终止本处理。
在步骤S1003中,边缘方向确定单元404将关注像素的像素值与关注像素的下邻接像素的像素值比较,并且确定关注像素的像素值是否更大。在关注像素的像素值更大的情况下,处理进行到步骤S1004。另一方面,在关注像素的像素值不是更大的情况下,处理进行到步骤S1005。
在步骤S1004中,边缘方向确定单元404生成表示边缘位于关注像素之下的边缘方向信号[Edge_Dir]。具体地,作为表示边缘位于关注像素之下的值,对边缘方向信号[Edge_Dir]设置“01”。生成的边缘方向信号[Edge_Dir]被发送到确定结果综合单元405并且终止本处理。
在步骤S1005中,边缘方向确定单元404将关注像素的像素值与关注像素的右邻接像素的像素值比较,并且确定关注像素的像素值是否更大。在关注像素的像素值更大的情况下,处理进行到步骤S1006。另一方面,在关注像素的像素值不是更大的情况下,处理进行到步骤S1007。
在步骤S1006中,边缘方向确定单元404生成表示边缘位于关注像素之右的边缘方向信号[Edge_Dir]。具体地,作为表示边缘位于关注像素之右的值,对边缘方向信号[Edge_Dir]设置“10”。生成的边缘方向信号[Edge_Dir]被发送到确定结果综合单元405并且终止本处理。
在步骤S1007中,边缘方向确定单元404生成表示边缘位于关注像素之左的边缘方向信号[Edge_Dir]。具体地,作为表示边缘位于关注像素之左的值,对边缘方向信号[Edge_Dir]设置“11”。生成的边缘方向信号[Edge_Dir]被发送到确定结果综合单元405并且终止本处理。
以上是边缘方向确定处理的内容。通过边缘方向信号,可知相对边缘、关注像素存在于哪个方向。
<边缘校正数据生成处理>
接着,说明边缘校正数据生成单元304中的边缘校正数据生成处理的详情。
边缘校正数据生成单元304通过参照预先准备的表等(例如,一维查找表:LUT)来生成边缘校正数据。具体地,边缘校正数据生成单元304通过参照LUT来确定对应于预定输入值的输出值(将预定输入值转换为输出值)并且取该输出值为边缘校正数据。在本实施例中,假设在将输入图像数据从8比特数据转换为4比特数据后生成上述边缘校正数据。图11A、图11B和图11C示出在边缘校正数据生成处理中使用的查找表的示例。在图11A到图11C中所示的各LUT中,按照一对一的方式将4比特(0到15)输入值和4比特输出值彼此相关联。图11A示出具有输入值被按照原样输出的线性特性的LUT。图11B和图11C示出具有根据打印机的特性的非线性特性的LUT。图11B示出输出值取比输入值小的值并且在打印机的灰度特性比通常更浓的情况下或者在边缘校正效果不太强的情况下使用的LUT。图11C示出输出值取比输入值大的值并且在打印机的灰度特性比通常不浓的情况下或者在边缘校正效果强的情况下使用的LUT。
<网屏处理>
接着,说明网屏处理单元305中的网屏处理。
图12是示出由网屏处理单元305进行的网屏处理的流程的流程图。网屏处理是通过利用预先设置的抖动矩阵将输入图像数据转换为打印机单元103能够打印的4比特图像数据的处理。
在步骤S1201中,网屏处理单元305通过利用预定抖动矩阵的多值抖动方法来将图像数据转换为4比特网屏数据。利用抖动矩阵的多值抖动方法是已知技术,因此省略说明。
在步骤S1202中,网屏处理单元305将在步骤S1201获得的网屏数据输出到图像组合单元307。
以上是网屏处理单元305中的网屏处理的内容。
<相位偏移的网屏处理>
接着,详细说明由相位偏移网屏处理单元306进行的相位被偏移的网屏处理。由于该处理,使得能够在图像组合单元307中的后续处理中将边缘部分中的网点偏移到对象的内侧。相位偏移网屏处理单元306中的网屏处理的流程与网屏处理单元305中的上述网屏处理的流程相同,因此,在下文中,仅说明不同点。
在之前描述的步骤S1201中,相位偏移网屏处理单元306通过利用相位被偏移的抖动矩阵的多值抖动方法,将图像数据转换为4比特网屏数据。具体地,相位偏移网屏处理单元306通过利用抖动矩阵(作为由网屏处理单元305使用的、并且相位在向上、向下、向左或向右方向偏移一个像素的抖动矩阵)将图像数据转换为网屏数据。图13A到图13E是说明相位被偏移的抖动矩阵的图。图13A中所示的由水平1到15构成的抖动矩阵1301是被网屏处理单元305使用的抖动矩阵。图13B到图13E中所示的由水平1到15构成的抖动矩阵1302到1305是被相位偏移网屏处理单元306使用并且抖动矩阵1301的相位分别沿上下左右方向偏移一个单元(像素)的抖动矩阵。换言之,图13B示出通过将抖动矩阵1301的相位沿向上方向偏移一个单元获得的抖动矩阵,图13C示出通过将相位沿向下方向偏移一个单元获得的抖动矩阵,图13D示出通过将相位沿向左方向偏移一个单元获得的抖动矩阵,图13E示出通过将相位沿向右方向偏移一个单元获得的抖动矩阵。
图14A到图14F是通过比较来说明由网屏处理单元305获得的网屏处理结果以及由相位偏移网屏处理单元306获得的网屏处理结果的图。图14A示出被输入到这两个网屏处理单元的图像数据,在该图像数据中,存在12垂直像素×7水平像素的矩形形状的对象1401。
图14B示出通过网屏处理单元305中的网屏处理生成的网屏数据。像素组1402是由通过半色调处理转换的半色调点构成的像素组。
图14C到图14F示出通过相位偏移网屏处理单元306中的网屏处理生成的、相位分别在上下左右方向被偏移一个单元的网屏数据。在图14C到图14F中,像素组1403到1406是由通过半色调处理转换的半色调点构成的像素组,各自对应于图14B中的像素组1402。图14C中的像素组1403的相位与像素组1402的相位相比、沿向上方向被偏移一个单元。类似地,图14D中的像素组1404的相位与像素组1402的相位相比、沿向下方向被偏移一个单元。然后,图14E中的像素组1405的相位与像素组1402的相位相比、沿向左方向被偏移一个单元,图14F中的像素组1406的相位与像素组1402的相位相比、沿向右方向被偏移一个单元。
<图像组合处理>
接着,说明由图像组合单元307进行的图像组合处理。图15A和图15B是示出由图像组合单元307进行的图像组合处理的流程的流程图。对输入图像数据(伽马校正后的图像数据)内的全部像素进行以下处理。
在步骤S1501中,图像组合单元307基于从边缘信息生成单元302输入的边缘信息,来确定关注像素是否是边缘像素。具体地,图像组合单元307参照边缘信息的高位的一比特的数据并且在值为“1”的情况下确定关注像素是边缘像素,然后处理进行到步骤S1502。另一方面,在高位的一比特的值是“0”的情况下,图像组合单元307确定关注像素是非边缘像素,然后处理进行到步骤S1503。
在步骤S1502中,图像组合单元307将从边缘校正数据生成单元304输入的边缘校正数据中的关注像素的像素值作为输出图像数据输出到打印机单元103。
在步骤S1503中,图像组合单元307通过参照从边缘信息生成单元302输入的边缘信息,来确定在关注像素的周边像素(围绕关注像素的周边8个像素)当中是否存在边缘像素。在周边像素当中存在边缘像素的情况下,处理进行到步骤S1504。另一方面,在周边像素当中不存在边缘像素的情况下,处理进行到步骤S1513。
在步骤S1504中,图像组合单元307通过将关注像素的像素值与预定参照像素的像素值比较,来确定关注像素是否是从内侧与边缘像素接触的像素(关注像素是否是对象内的像素)。这里,参照像素是指与关注像素邻接并且处于如图16中所示的位置关系的像素。在图16中,中心的像素1601是关注像素并且其他像素1602到1609是参照像素。然后,根据以下条件来确定关注像素是否是从内侧与边缘像素接触的像素。
·在参照像素1602的边缘信息的高位的一比特为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1606的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在参照像素1603的边缘信息的高位的一比特为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1607的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在参照像素1604的边缘信息的高位的一比特为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1608的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在参照像素1605的边缘信息的高位的一比特为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1608的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在不满足上述四个条件的情况下,确定关注像素不是从内侧与边缘像素接触的像素。
在确定结果表示关注像素是从内侧与边缘像素接触的像素的情况下,处理进行到步骤S1505。另一方面,在确定关注像素不是从内侧与边缘像素接触的像素的情况下,处理进行到步骤S1513。
在步骤S1505中,图像组合单元307通过参照边缘信息,来确定是否在关注像素之上存在边缘(边缘信息的低位的两比特的值是否是“00”)。在低位的两比特的值是“00”的情况下,确定在关注像素之上存在边缘并且处理进行到步骤S1506。另一方面,在低位的两比特的值不是“00”的情况下,处理进行到步骤S1507。
在步骤S1506中,图像组合单元307将网屏处理单元305和相位偏移网屏处理单元306的输出结果组合并生成组合数据[combData]。在该步骤中,相位沿与边缘的方向(这里为向上方向)相反的方向被偏移的网屏数据被组合,从而将网点移动到对象内侧。具体地,通过将相位偏移网屏处理单元306的输出结果当中的相位被向下偏移的网屏数据[PSdownSc]与网屏处理单元305的输出结果[Sc]相加并且通过将和与预先确定的组合系数β相乘,来获得组合数据[combData]。
在步骤S1507中,图像组合单元307通过参照边缘信息,来确定是否在关注像素之下存在边缘(边缘信息的低位的两比特的值是否是“01”)。在低位的两比特的值是“01”的情况下,确定在关注像素之下存在边缘并且处理进行到步骤S1508。另一方面,在低位的两比特的值不是“01”的情况下,处理进行到步骤S1509。
在步骤S1508中,图像组合单元307将网屏处理单元305和相位偏移网屏处理单元306的输出结果组合,并生成组合数据[combData]。在该步骤中,相位沿与边缘的方向(这里为向下方向)相反的方向被偏移的网屏数据被组合,从而将网点移动到对象内侧。具体地,通过将相位偏移网屏处理单元306的输出结果当中的相位被向上偏移的网屏数据[PSupSc]与网屏处理单元305的输出结果[Sc]相加并且通过将和与预先确定的组合系数β相乘,来获得组合数据[combData]。
在步骤S1509中,图像组合单元307通过参照边缘信息,来确定是否在关注像素之左存在边缘(边缘信息的低位的两比特的值是否是“10”)。在低位的两比特的值是“10”的情况下,确定在关注像素之左存在边缘并且处理进行到步骤S1510。另一方面,在低位的两比特的值不是“10”的情况下,确定边缘存在于关注像素之右,并且处理进行到步骤S1511。
在步骤S1510中,图像组合单元307将网屏处理单元305和相位偏移网屏处理单元306的输出结果组合,并生成组合数据[combData]。在该步骤中,相位沿与边缘的方向(这里为向左方向)相反的方向被偏移的网屏数据被组合,从而将网点移动到对象内侧。具体地,通过将相位偏移网屏处理单元306的输出结果当中的相位被向右偏移的网屏数据[PSrightSc]与网屏处理单元305的输出结果[Sc]相加并且通过将和与预先确定的组合系数β相乘,来获得组合数据[combData]。
在步骤S1511中,图像组合单元307将网屏处理单元305和相位偏移网屏处理单元306的输出结果组合,并生成组合数据[combData]。在该步骤中,相位沿与边缘的方向(这里为向右方向)相反的方向被偏移的网屏数据被组合,从而将网点移动到对象内侧。具体地,通过将相位偏移网屏处理单元306的输出结果当中的相位被向左偏移的网屏数据[PSleftSc]与网屏处理单元305的输出结果[Sc]相加并且通过将和与预先确定的组合系数β相乘,来获得组合数据[combData]。
在步骤S1512中,图像组合单元307将针对关注像素生成的组合数据[combData]作为输出图像数据输出到打印机单元103。
在步骤S1513中,图像组合单元307将作为网屏处理单元305的输出结果的网屏数据[Sc]中的关注像素的像素值作为输出图像数据输出到打印机单元103。
重复上述处理,直到输入图像数据内不再有尚未进行处理的像素为止。以上是图像组合处理的内容。如上所述,根据边缘信息以及伽马校正后的图像数据,来在边缘校正数据、组合数据与网屏数据之间适当地切换输出的图像数据(关注像素的像素值)。
在本实施例中,通过与组合系数β相乘来生成组合数据,但是生成方法不限于此。例如,还可以将通过把网屏处理单元305及相位偏移网屏处理单元306的处理结果相加而获得的值输入到一维查找表,来生成组合数据。
最后,参照图17A到图17F至图19A到图19D来说明应用本实施例的情况与不应用本实施例的情况之间的差异。
图17A到图17F是说明不利用相位偏移网屏处理的结果而进行边缘校正处理的情况的示例的图。
图17A示出被输入到网屏处理单元305的图像数据,如之前描述的图14A中一样,存在12垂直像素×7水平像素的矩形对象1701。
图17B是用斜线示出边缘信息(被输入到图像组合单元307)的高位的一比特为“1”的边缘像素的图。对边缘像素1702应用边缘校正数据,并且对边缘像素1702的内侧区域内的像素1703应用网屏数据。
图17C是示出通过网屏处理单元305生成的网屏数据的图。像素组1704是由通过半色调处理转换的半色调点构成的像素组。
图17D是示出被输入到图像组合单元307的边缘校正数据的图,并且以灰色表现的像素的像素值是图17B中所示的边缘像素1702中的像素值。
图17E是示出根据现有技术的边缘校正处理的结果的示例的图。在该情况下,对于边缘像素1702,进行将图17C所示的网屏数据与图17D所示的边缘校正数据比较并且取较大值为输出值的组合处理。
图17F是示出根据另一现有技术的边缘校正处理的结果的示例的图。在这种情况下,对于边缘像素1702,进行按照原样使用图17D所示的边缘校正数据的组合处理。
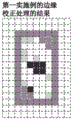
图18A到图18F是说明通过应用本实施例来进行边缘校正处理的情况的示例的图。
图18A示出被输入到网屏处理单元305的图像数据,如图17A中一样,存在12垂直像素×7水平像素的矩形对象1801。
图18B是用斜线示出边缘信息(被输入到图像组合单元307)的高位的一比特为“1”的边缘像素1802以及通过斜纹网格示出与边缘像素接触的内边缘像素1803的图。针对边缘像素1802,使用边缘校正数据,针对内边缘像素1803,使用组合数据,针对内边缘像素1803的内侧区域内的像素1804,使用网屏数据。
图18C是示出由网屏处理单元305生成的网屏数据的图。像素组1805是由通过半色调处理转换的半色调点构成的像素组。
图18D是示出被输入到图像组合单元307的边缘校正数据的图,并且以灰色表现的像素的像素值是图18B中所示的边缘像素1802中的像素值。
图18E是示出由图像组合单元307生成的组合数据的图,并且以灰色表现的多个水平的像素的像素值是图18B中所示的内边缘像素1803中的像素值。
图18F是从图像组合单元307输出的作为根据本实施例的边缘校正处理的结果的输出图像数据的图。在这种情况下,分别地,图18D中的边缘校正数据用于边缘像素1802,图18E中的组合数据用于内边缘像素1803,图18C中的网屏数据用于内边缘像素的内侧区域内的像素1804。
图19A到图19D是说明在根据本实施例的边缘校正处理后的图像中的各像素的曝光量的图。
图19A示出针对像素的信号值的曝光量。像素1901的像素值是“4”并且以浅灰色示出曝光量小。像素1902的像素值为“8”并且曝光量大于像素1901的曝光量,像素1902以略微深的灰色来表现。像素1903的像素值是“15”并且曝光量大于像素1902的曝光量,像素1903用黑色表现。
图19B是示出根据图17E所示的现有技术的边缘校正处理结果(1)中的各像素的曝光量的图。在图19B中,边缘部分的像素值针对不同像素而不同,例如,在像素1904(灰色)与像素1905(黑色)之间出现水平上的差异。另外,因为电子照相的特性,半点被全点拉出,因此,水平差在潜像形成时变得更为显著,并且锯齿没有被完全去除。
图19C是示出根据图17F所示的另一现有技术的边缘校正处理结果(2)中的各像素的曝光量的图。在图19C中,边缘部分的全部像素值相同并且为“8”,因此,将不出现在边缘部分中的水平差的这种问题。然而,图19B中的像素1905中已存在的网点(全点)被用图19C中的具有像素值“8”的半点来替换,因此,网点的连续性丢失。例如,像素1907的曝光对像素1908的影响丢失。换言之,因为边缘部分中存在的全点由于边缘校正数据而用半点替换,所以在边缘前网点的连续性丢失,并且将导致不自然。
从图19B和图19C显然可知,在边缘部分的周边未组合相位被偏移的网屏处理的结果的情况下,锯齿没被去除或者图像中出现缺陷。
图19D是示出图18F所示的根据本实施例的边缘校正处理结果中的各像素的曝光量的图。在图19D中,如图19C中一样,边缘部分由相同的半点构成并且像素值不存在变化,因此,不出现边缘部分中的水平差(崎岖)的问题。另外,通过将相位被偏移的网屏结果跟与对象内的边缘部分邻接的像素(内边缘像素)组合,边缘部分中已存在的网点被偏移到对象内侧。例如,通过向像素1910添加点,能够使网点看似以像素1909为中心存在。由此,在边缘部分中也保持网点的连续性。
根据本实施例,相位被偏移的网屏处理的结果跟对象内侧的与边缘部分邻接的像素组合,并且已被替换的边缘部分中的网点再次被布置在对象内侧。由此,能够减少边缘部分中的锯齿,同时保持就边缘部分附近的网点的连续性。
[第二实施例]
接着,说明作为第二实施例的方面,其中替代针对与对象内侧的边缘部分邻接的像素、组合相位被偏移的网屏结果,将边缘部分中存在的网点移到对象内侧。与第一实施例共同部分的说明被省略或简化,在下文中主要说明不同点。
图20是示出根据本实施例的作为被构造为进行图像处理的功能单元的图像处理单元的内部结构的框图。根据本实施例的图像处理单元2000包括色彩校正单元301、边缘信息生成单元2001、伽马校正单元303、边缘校正数据生成单元304、网屏处理单元305以及图像组合单元2002。在这些单元中,色彩校正单元301、伽马校正单元303、边缘校正数据生成单元304以及网屏处理单元305与第一实施例的相同。
边缘信息生成单元2001针对CMYK的各色彩生成边缘信息。图21是示出根据本实施例的边缘信息生成单元2001的内部结构的框图。与第一实施例的图4相比较,可知不存在边缘方向确定单元404。由此,在本实施例中的边缘信息中,不包括表示边缘的方向的信息。换言之,本实施例中的边缘信息是针对各像素具有1比特值的数据,并且在像素是边缘像素的情况下表示“1”而在像素是非边缘像素的情况下表示“0”的信息。在图像组合单元2002的切换处理时参照所生成的边缘信息。
图像组合单元2002基于从边缘信息生成单元2001接收的边缘信息以及伽马校正后的图像数据,来进行稍后描述的图像组合处理。
<图像组合处理>
接着,说明通过图像组合单元2002进行的图像组合处理的详情。图22是示出由图像组合单元2002进行的图像组合处理的流程的流程图。图23A到图23G是对应于图18A到图18F的图,并且是说明通过利用本实施例来进行边缘校正处理的情况的示例的图。图23A示出被输入到网屏处理单元305的图像数据并且如之前描述的图18A中一样,存在12垂直像素×7水平像素的矩形对象2301。图23B是用斜线示出边缘信息(被输入到图像组合单元2002)为“1”的边缘像素2302以及通过斜纹网格示出与边缘像素接触的内边缘像素2303的图。图23C是示出由网屏处理单元305生成的网屏数据的图。像素组2304是由通过半色调处理转换的半色调点构成的像素组。图23D是示出被输入到图像组合单元2002的边缘校正数据的图,并且以灰色表现的像素的像素值是图23B中所示的边缘像素2302中的像素值。图23E是示出由图像组合单元2002生成的点移动数据的图。图23F是示出由图像组合单元2002生成的点校正数据的图。图23G是示出从图像组合单元2002输出的作为根据本实施例的边缘校正处理结果的输出图像数据的图。
在步骤S2201中,图像组合单元2002基于从边缘信息生成单元2001输入的边缘信息来确定关注像素是否是边缘像素。具体地,在边缘信息的值是“1”的情况下,确定关注像素是边缘像素并且处理进行到步骤S2202。另一方面,在边缘信息的值是“0”的情况下,确定关注像素是非边缘像素并且处理进行到步骤S2203。
在步骤S2202,图像组合单元2002将从边缘校正数据生成单元304输入的边缘校正数据中的关注像素的像素值作为输出图像数据输出到打印机单元103。
在步骤S2203中,图像组合单元2002通过参照从边缘信息生成单元2001输入的边缘信息,来确定在关注像素的周边像素(围绕关注像素的8个周边像素)当中是否存在边缘像素。在周边像素当中存在边缘像素的情况下,处理进行到步骤S2204。另一方面,在周边像素当中不存在边缘像素的情况下,处理进行到步骤S2211。
在步骤S2204中,图像组合单元2202通过将关注像素的像素值与预先描述的参照像素的像素值(这两个像素值均是伽马校正后的值)比较,来确定关注像素是否是从内侧与边缘像素接触的像素(关注像素是否是对象内的像素)。具体地,根据以下条件来进行确定(参见之前描述的图16)。
·在参照像素1602的边缘信息的值为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1606的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在参照像素1603的边缘信息的值为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1607的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在参照像素1604的边缘信息的值为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1608的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在参照像素1605的边缘信息的值为“1”的情况下,在通过从关注像素1601的像素值中减去参照像素1608的像素值而获得的值大于“0”的条件下,确定关注像素是从内侧与边缘像素接触的像素。
·在不满足上述四个条件的情况下,确定关注像素不是从内侧与边缘像素接触的像素。
在确定结果表示关注像素是从内侧与边缘像素接触的像素的情况下,处理进行到步骤S2205。另一方面,在确定关注像素不是从内侧与边缘像素接触的像素的情况下,处理进行到步骤S2211。
在步骤S2205中,图像组合单元2002确定关注像素的上邻接像素、下邻接像素、左邻接像素或右邻接像素是否是边缘像素以及是否是网点的一部分(是否是构成网点的像素)。具体地,针对关注像素的上邻接像素、下邻接像素、左邻接像素或右邻接像素,确定边缘信息(1比特)的值是否是“1”并且像素是否是网屏数据中具有大于等于“1”的值的像素。在确定结果表示关注像素的上邻接像素、下邻接像素、左邻接像素或右邻接像素是边缘像素并且是构成网点的像素(下文中为边缘点像素)的情况下,处理进行到步骤S2206。另一方面,关注像素的上邻接像素、下邻接像素、左邻接像素或右邻接像素不是边缘点像素的情况下,处理进行到步骤S2208。
在步骤S2206中,图像组合单元2002生成点移动数据。具体地,通过从边缘点像素的网屏数据中的像素值中减去从边缘校正数据生成单元304输入的边缘校正数据中的像素值,来获得点移动数据。换言之,由边缘点像素的网屏数据[DotVal]以及边缘校正数据[EdgeVal]通过以下表达式(1)来求出点移动数据[DotShiftVal]。
DotShiftVal=DotVal-EdgeVal···表达式(1)
这里,将图23E中的关注像素是像素2305(点移动数据中以灰色表现的像素中的一者)的情况作为示例进行具体说明。图23A中的像素2306、图23B中的像素2307、图23C中的像素2308以及图23D中的像素2309是位于与图23E中的像素2305的位置相同位置的对应像素。
首先,关注像素不是边缘,因此,处理进行到步骤S2203(步骤S2201中“否”,参见图23B中的像素2307)。
接着,作为在关注像素周边并且是边缘的像素,存在图23B中的像素2310,因此,处理进行到步骤S2204(步骤S2203中“是”)。
然后,图23A中的像素2306的像素值是大于“0”的值,因此,确定像素2306位于边缘的内侧并且处理进行到步骤S2205(步骤S2204中“是”)。
然后,关注像素的左邻接像素是边缘像素并且还是网点(参见图23B中的像素2310以及图23C中的像素2311),因此,处理进行到步骤S2206并且生成点移动数据。这里,像素2311的像素值是“15”,因此,DotVal是“15”。因为像素2312的像素值是“8”(参见图23D),所以边缘校正数据[EdgeVal]是“8”。因此,通过从“15”中减去“8”来获得点移动数据[DotShiftVal]是“7”。
以这种方式,生成点移动数据。作为选择,还可以通过参照关注像素周边上的网屏数据以及通过根据从周边网点起到关注像素的距离确定像素值,来获得点移动数据。
说明返回到图22中的流程图。
在步骤S2207中,图像组合单元2002将针对关注像素生成的点移动数据作为输出图像数据输出到打印机单元103。
在步骤S2208中,图像组合单元2002确定关注像素是否是网点的一部分。具体地,图像组合单元2002确定关注像素是否是从网屏处理单元305输入的网屏数据中的具有大于等于“1”的值的像素(构成网点的像素)。在确定结果表示关注像是构成网点的像素的情况下,处理进行到步骤S2209。另一方面,在关注像素不是构成网点的像素的情况下,处理进行到步骤S2211。
在步骤S2209中,图像组合单元2002生成点校正数据。由包括关注像素的预定区域(例如,3×3像素)中的网屏数据的和值[DotSum]、预定区域中的边缘校正数据的和值[EdgeSum]、以及应用了预定区域内的点校正数据的像素的数量[DotNum],通过利用以下表达式(2)来求出点校正数据[DotFixVal](小数部分被舍去)。
DotFixVal=(DotSum-EdgeSum)/DotNum···表达式(2)
这里,说明关注像素是图23F中的像素2313(点校正数据中以灰色表现的像素之一)的情况。图23A中的像素2314、图23B中的像素2315、图23C中的像素2316是位于与图23F中的像素2313的位置相同位置的对应像素。
首先,关注像素不是边缘,因此,处理进行到步骤S2203(步骤S2201中“否”,参见图23B中的像素2315)。
接着,作为在关注像素周边并且是边缘的像素,存在图23B中的像素2317,因此,处理进行到步骤S2204(步骤S2203中“是”)。
然后,图23F中的像素2313的像素值是大于“0”的值,因此,确定像素2313位于边缘的内侧并且处理进行到步骤S2205(步骤S2204中“是”)。
然后,在关注像素的上邻接像素、下邻接像素、左邻接像素和右邻接像素当中不存在作为边缘像素并构成网点的像素,因此,处理进行到步骤S2208(步骤S2205中“否”)。
然后,关注像素构成网点(参见图23C中的像素2316),因此,处理进行到步骤S2209并且生成点校正数据。这里,在像素2313(=像素2316)被取为关注像素的情况下3×3像素的网屏数据的和值[DotSum]为“53”,因为存在像素值是“15”的三个像素以及存在像素值是“8”的一个像素。类似地,上述3×3像素内的边缘校正数据的和值[EdgeSum]是“24”,因为存在像素值是“8”的三个像素。另外,被应用点校正数据的上述3×3像素内的像素(在3×3像素内像素值为0并且不构成边缘的像素以外的像素)的数量[DotNum]为3(参见图23F)。因此,该情况下的点校正数据[DotFixVal]为(53-24)/3=9.66≈10。
将“包括关注像素的预定区域内的网屏数据的和值与预定区域内的边缘校正数据的和值之差”除以“应用预定区域内的点校正数据的像素的数量”的理由在于,保持以关注像素为中心的3×3像素中的浓度。最初,图23C中的网屏数据处于针对图23A中的输入图像保持浓度的状态。然而,图23E中的边缘校正数据被添加到边缘部分,因此,浓度增加。图像组合处理后的边缘部分由边缘校正数据和点校正数据构成,因此,通过从浓度被保持的网屏数据的结果中减去边缘校正数据,使得能够计算点校正数据。在本实施例中,预定区域是3×3像素的区域,但是可以接受5×5像素或7×7像素的区域。
在步骤S2210中,图像组合单元2002将针对关注像素生成的点校正数据作为输出图像数据输出到打印机单元103。
在步骤S2211中,图像组合单元2102将作为网屏处理单元305的输出结果的网屏数据[Sc]中的关注像素的像素值作为输出图像数据输出到打印机单元103。
重复上述处理,直到输入图像数据内不再有尚未进行处理的像素。以上是根据本实施例的图像组合处理的内容。
用于生成点移动数据或点校正数据的方法不限于上述方法。例如,还可以通过利用预先准备的LUT来生成点移动数据或点校正数据,在该LUT中关注像素的伽马校正后的像素值被取为输入值并且与各输入值对应的点移动数据或点校正数据的值被取为输出值。
<变型例>
在边缘密集的对象(诸如小点尺寸的字符)的情况下,通过利用上述方法生成点移动数据将引起图像的劣化,因为在边缘密集的部分与位于其周边并且边缘不密集的部分之间产生浓度差。因此,基于上述第二实施例,说明作为变型例的方面,其中通过还考虑关注像素周边的边缘像素的数量来生成点移动数据。
与第二实施例的差异仅在于步骤S2206的点移动数据生成处理的内容,因此,在下文中,仅说明本变型例中用于生成点移动数据的方法。
在步骤S2206中,图像组合单元2002通过从边缘点像素的网屏数据的像素值中减去边缘校正数据的像素值并且将通过该相减获得的值乘以预定边缘校正率,来获得点移动数据。这里,边缘校正率是通过关注像素的预定周边区域(例如,5×5像素的区域)内的边缘像素的数量来确定的值,例如通过一维查找表(校正率表)来确定的值。图24是示出在预定周边区域是5×5像素的区域的情况下校正率表的特性的示例的图。在具有图14A到图14F中所示的特性的校正率表中,例如,在关注像素周边存在7个边缘像素的情况下,边缘校正率为80%并且可知边缘校正率随着边缘像素的数量增加而变小。换言之,在本变型例中,关注像素周边存在的边缘越多,则生成的点移动数据的值越小。由此,能够抑制在边缘密集的部分与其周边部分之间出现大的浓度差。
图25A到图25G是示出本实施例(包括变型例)中的边缘校正处理的结果的图。
图25A示出被输入到网屏处理单元305的图像数据并且示出6垂直像素×7水平像素的矩形形状的对象2501与比对象2501小一号并且具有不规则形状的对象2502存在于彼此接近的位置。对象2501的浓度与对象2502的浓度相同。
图25B是其中用斜线表现边缘信息的值为“1”的边缘像素的图。在图25B中,用虚线表示的矩形2504代表在像素2503被取为关注像素的情况下的周边区域(5×5像素的区域)。在该情况下,边缘像素的数量为7。另外,用虚线表示的矩形2506代表在像素2505被取为关注像素的情况下的周边区域(5×5像素的区域)。在这种情况下,边缘像素的数量为15。
图25C是示出由网屏处理单元305生成的网屏数据的图。像素组2507是由通过半色调处理转换的半色调点构成的像素组。
图25D是示出被输入到图像组合单元2002的边缘校正数据的图,并且像素值是由图25B中的斜线表现的边缘像素中的像素值。
图25E是示出被输入到图像组合单元2002的点移动数据的图。
图25F是示出在应用第二实施例的情况下的边缘校正处理结果的示例的图。像素2508是构成边缘的边缘像素并且存在网点,因此通过图像组合处理来对像素2509添加点。
图25G是示出在应用变型例的情况下的边缘校正处理结果的示例的图。像素2510是构成边缘的边缘像素并且是网点。关于第二实施例中要被添加点的像素2511,在像素2511被取为关注像素的情况下周边区域内的边缘像素的数量为15,因此,作为结果,边缘校正率为0%(参见图24中的校正率表)并且像素值为“0(白像素)”。
在将图25F与图25G比较的情况下,在图25F中对象2502的整体的浓度比在图25G中高。其结果是,最初应当以相同浓度来表现的两个对象2501与2502之间的浓度差在图25F中变大,但是在图25G中较小,因为像素2511是白像素。
如上所述,通过根据边缘像素的数量生成点移动数据,甚至在边缘密集的情况下,也能够实现边缘校正处理而不引起图像的劣化。
另外,关于边缘校正数据和点校正数据,还能够如点移动数据的情况下一样根据边缘像素的数量来生成它们。
如上所述,根据本实施例,通过将网点移动到对象内侧,能够在保持就边缘部分邻近的网点的连续性的同时减少边缘部分中的锯齿。另外,不进行相位偏移网屏处理,因而无需保持用于此的电路并且能够以相比第一实施例更低的成本来实现本实施例。
[其他实施例]
还可以通过读出并执行记录在存储介质(还可以全称为“非临时性计算机可读存储介质”)上的用于执行一个或多个上述实施例的功能的计算机可执行指令(例如,一个或多个程序)、和/或包括用于进行上述实施例的一个或多个的功能的一个或多个电路(例如,特定应用集成电路(ASIC))的系统或装置的计算机来实现本发明的实施例,以及通过系统或装置的计算机通过例如从存储介质读出并执行用于执行一个或多个上述实施例的功能的计算机可执行指令、和/或控制一个或多个电路来进行一个或多个上述实施例的功能的方法来实现本发明的实施例。计算机可以包括一个或多个处理器(例如,中央处理单元(CPU)、微处理单元(MPU)),并且可以包括独立的计算机或独立的处理器的网络,以读出并执行计算机可执行指令。计算机可执行指令可以例如从网络或存储介质被提供给计算机。存储介质可以包括例如硬盘、随机存取存储器(RAM)、只读存储器(ROM)、分布式计算系统的存储器、光盘(诸如压缩光盘(CD)、数字通用光盘(DVD)或蓝光光盘(BD)TM)、闪存设备、存储卡等中的一个或多个。
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(CPU)、微处理单元(MPU)读出并执行程序的方法。
根据本发明,能够在将图像的劣化保持到最小的同时减少边缘部分中的锯齿。
虽然参照示例性实施例对本发明进行了描述,但是应当理解,本发明并不限于所公开的示例性实施例。应当对所附权利要求的范围给予最宽的解释,以使其涵盖所有这些变型例以及等同的结构和功能。
Claims (4)
1.一种图像处理装置,该图像处理装置包括:
检测部,其用于检测包括在输入图像中的对象的内边缘部分;
半色调处理部,其用于对所述输入图像进行半色调处理,以生成半色调图像;
第一输出部,其用于在关注像素包括在内边缘部分中的情况下输出边缘校正数据;以及
第二输出部,其用于在关注像素未包括在内边缘部分中、从对象的内侧接触内边缘部分且构成网点、以及在与关注像素上邻接、下邻接、左邻接或右邻接的位置处不具有构成内边缘部分且构成网点的像素的情况下,输出基于边缘校正数据确定的半色调图像中的关注像素的浓度。
2.根据权利要求1所述的图像处理装置,该图像处理装置还包括:
边缘校正部,其用于生成构成输入图像的内边缘部分的像素的浓度已经被校正的边缘校正数据,
其中,所述第二输出部进一步基于预定区域的边缘校正数据来输出半色调图像中对应的关注像素的浓度。
3.根据权利要求2所述的图像处理装置,其中,
边缘校正部进行的校正是用于增加构成输入图像中的内边缘部分的像素的浓度的校正。
4.根据权利要求2或3所述的图像处理装置,其中,
所述第二输出部进行输出,使得基于通过从在半色调图像中包括关注像素的预定区域的浓度和值中减去预定区域中的边缘校正数据的浓度和值而获得的值除以预定区域内的点校正数据的像素的数量,来保持半色调图像中的浓度。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-167978 | 2014-08-20 | ||
| JP2014167978A JP6403490B2 (ja) | 2014-08-20 | 2014-08-20 | 画像処理装置、画像形成装置、画像処理方法及びプログラム。 |
| CN201510516334.9A CN105391913B (zh) | 2014-08-20 | 2015-08-20 | 图像处理装置及图像处理方法 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510516334.9A Division CN105391913B (zh) | 2014-08-20 | 2015-08-20 | 图像处理装置及图像处理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108737687A CN108737687A (zh) | 2018-11-02 |
| CN108737687B true CN108737687B (zh) | 2021-03-09 |
Family
ID=55349375
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510516334.9A Active CN105391913B (zh) | 2014-08-20 | 2015-08-20 | 图像处理装置及图像处理方法 |
| CN201811048315.8A Active CN108737687B (zh) | 2014-08-20 | 2015-08-20 | 图像处理装置、图像处理方法和存储介质 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201510516334.9A Active CN105391913B (zh) | 2014-08-20 | 2015-08-20 | 图像处理装置及图像处理方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US9692940B2 (zh) |
| JP (1) | JP6403490B2 (zh) |
| CN (2) | CN105391913B (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6403490B2 (ja) * | 2014-08-20 | 2018-10-10 | キヤノン株式会社 | 画像処理装置、画像形成装置、画像処理方法及びプログラム。 |
| JP6613115B2 (ja) | 2015-11-19 | 2019-11-27 | キヤノン株式会社 | 画像処理装置及び画像処理方法とプログラム |
| JP6833552B2 (ja) | 2017-02-16 | 2021-02-24 | キヤノン株式会社 | 画像形成装置、画像形成方法、プログラム。 |
| CN107123096B (zh) | 2017-04-20 | 2018-11-06 | 腾讯科技(深圳)有限公司 | Vr设备中的图像显示方法和装置以及vr设备 |
| JP7119404B2 (ja) * | 2018-02-13 | 2022-08-17 | コニカミノルタ株式会社 | 画像データ処理方法、画像データ処理装置及びインクジェット記録装置 |
| CN108320271A (zh) * | 2018-03-13 | 2018-07-24 | 武汉大学 | 一种顾及边缘信息的多级误差扩散图像网目调方法和系统 |
| CN109615579B (zh) * | 2018-11-27 | 2023-04-14 | 成都圭目机器人有限公司 | 一种应用于使用led射灯的面阵相机的光照补偿方法 |
| CN112004684A (zh) * | 2019-03-26 | 2020-11-27 | 三菱电机株式会社 | 热敏打印机和打印方法 |
| JP7583995B2 (ja) * | 2021-02-08 | 2024-11-15 | 京セラドキュメントソリューションズ株式会社 | 画像処理装置および画像形成装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001148009A (ja) * | 1999-11-19 | 2001-05-29 | Fujitsu Ltd | 画像処理装置及び画像処理プログラムを格納した記憶媒体 |
| CN101388948A (zh) * | 2007-09-13 | 2009-03-18 | 柯尼卡美能达商用科技株式会社 | 图像处理装置和图像处理方法 |
| CN102063278A (zh) * | 2009-11-16 | 2011-05-18 | 佳能株式会社 | 图像处理装置及图像处理方法 |
| JP2011176556A (ja) * | 2010-02-24 | 2011-09-08 | Ricoh Co Ltd | 画像処理装置、プログラム及び記録媒体 |
| CN102377911A (zh) * | 2010-08-23 | 2012-03-14 | 株式会社东芝 | 图像处理装置、图像处理方法及摄像机模组 |
| WO2013161840A1 (ja) * | 2012-04-26 | 2013-10-31 | 日本電気株式会社 | 画像処理方法、及び画像処理装置 |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6026190A (en) * | 1994-10-31 | 2000-02-15 | Intel Corporation | Image signal encoding with variable low-pass filter |
| JPH08265558A (ja) * | 1994-12-26 | 1996-10-11 | Ricoh Co Ltd | 画像形成装置 |
| JP3171146B2 (ja) * | 1997-08-12 | 2001-05-28 | 村田機械株式会社 | 画像処理装置 |
| JP2001313831A (ja) * | 1999-11-05 | 2001-11-09 | Ricoh Co Ltd | 画像処理装置、画像処理方法、およびその方法をコンピュータに実行させるプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP2001274989A (ja) * | 2000-03-27 | 2001-10-05 | Ricoh Co Ltd | 画像処理装置及び画像処理方法並びにプリンタ出力装置 |
| JP2002024819A (ja) * | 2000-07-12 | 2002-01-25 | Ricoh Co Ltd | 画像処理装置、画像処理方法およびその方法をコンピュータに実行させるプログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP3736535B2 (ja) * | 2003-02-26 | 2006-01-18 | コニカミノルタビジネステクノロジーズ株式会社 | 原稿種類判別装置 |
| JP4086756B2 (ja) * | 2003-10-21 | 2008-05-14 | キヤノン株式会社 | 画像処理装置および画像処理方法 |
| JP4656598B2 (ja) * | 2003-12-02 | 2011-03-23 | 富士ゼロックス株式会社 | 画像形成装置、校正方法及びそのプログラム |
| JP4591745B2 (ja) * | 2003-12-02 | 2010-12-01 | 富士ゼロックス株式会社 | 画像形成装置、パターン形成方法及びそのプログラム |
| JP2005260517A (ja) * | 2004-03-11 | 2005-09-22 | Sanyo Electric Co Ltd | 画像信号処理装置 |
| JP4217706B2 (ja) | 2004-11-01 | 2009-02-04 | キヤノン株式会社 | 画像処理装置及び画像処理方法 |
| US7706021B2 (en) | 2004-11-01 | 2010-04-27 | Canon Kabushiki Kaisha | Image processing apparatus and image processing method for suppressing jaggies in the edge portions of image |
| JP4779987B2 (ja) * | 2007-02-08 | 2011-09-28 | コニカミノルタビジネステクノロジーズ株式会社 | 画像処理装置及び画像処理方法 |
| JP4966137B2 (ja) * | 2007-09-07 | 2012-07-04 | キヤノン株式会社 | 画像処理装置、その制御方法、及びプログラム |
| JP5415729B2 (ja) * | 2007-09-10 | 2014-02-12 | キヤノン株式会社 | 画像処理方法及び画像処理装置 |
| JP4912270B2 (ja) * | 2007-10-16 | 2012-04-11 | キヤノン株式会社 | 画像処理装置及びその制御方法 |
| JP2010028206A (ja) * | 2008-07-15 | 2010-02-04 | Canon Inc | 画像形成システム、画像形成装置、画像処理装置および画像形成方法 |
| JP2010252194A (ja) * | 2009-04-17 | 2010-11-04 | Canon Inc | 画像処理装置及び画像処理方法 |
| KR101626002B1 (ko) * | 2009-08-07 | 2016-05-31 | 삼성전자주식회사 | 디지털 촬영 장치, 그 제어 방법, 및 컴퓨터 판독가능 저장매체 |
| KR101630303B1 (ko) * | 2010-02-02 | 2016-06-14 | 삼성전자주식회사 | 디지털 영상 처리 장치 및 그 제어 방법 |
| JP5480102B2 (ja) * | 2010-10-28 | 2014-04-23 | 京セラドキュメントソリューションズ株式会社 | 画像処理装置、画像形成装置、および画像処理方法 |
| KR101346982B1 (ko) * | 2010-11-08 | 2014-01-02 | 한국전자통신연구원 | 텍스쳐 영상과 깊이 영상을 추출하는 장치 및 방법 |
| JP5323035B2 (ja) * | 2010-12-10 | 2013-10-23 | キヤノン株式会社 | 画像形成装置及びその画像形成方法 |
| JP5055418B2 (ja) * | 2010-12-10 | 2012-10-24 | キヤノン株式会社 | 画像処理装置および画像処理方法 |
| JP5812669B2 (ja) * | 2011-04-27 | 2015-11-17 | キヤノン株式会社 | 画像処理装置および画像処理方法およびコンピュータプログラム。 |
| JP5609903B2 (ja) * | 2012-02-21 | 2014-10-22 | コニカミノルタ株式会社 | 画像処理装置及び画像処理方法 |
| JP6071518B2 (ja) * | 2012-12-14 | 2017-02-01 | キヤノン株式会社 | 画像形成装置、及び画像形成方法 |
| JP6128827B2 (ja) * | 2012-12-18 | 2017-05-17 | キヤノン株式会社 | 画像処理装置及びその制御方法、並びにプログラム |
| KR20140095838A (ko) * | 2013-01-25 | 2014-08-04 | 한국전자통신연구원 | 3차원 정보 복원 장치 및 방법 |
| JP6381183B2 (ja) * | 2013-07-09 | 2018-08-29 | キヤノン株式会社 | 画像データに含まれるオブジェクトを拡張するための装置、方法、および、プログラム |
| JP5874721B2 (ja) * | 2013-12-25 | 2016-03-02 | コニカミノルタ株式会社 | 画像処理装置、画像補正方法、及び、プログラム |
| JP6280378B2 (ja) * | 2014-02-03 | 2018-02-14 | キヤノン株式会社 | 画像処理装置およびその制御方法 |
| JP6403490B2 (ja) * | 2014-08-20 | 2018-10-10 | キヤノン株式会社 | 画像処理装置、画像形成装置、画像処理方法及びプログラム。 |
| JP6452504B2 (ja) * | 2015-03-10 | 2019-01-16 | キヤノン株式会社 | 画像形成装置、画像形成方法、プログラム |
-
2014
- 2014-08-20 JP JP2014167978A patent/JP6403490B2/ja active Active
-
2015
- 2015-08-10 US US14/822,095 patent/US9692940B2/en active Active
- 2015-08-20 CN CN201510516334.9A patent/CN105391913B/zh active Active
- 2015-08-20 CN CN201811048315.8A patent/CN108737687B/zh active Active
-
2017
- 2017-05-24 US US15/604,590 patent/US10148854B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001148009A (ja) * | 1999-11-19 | 2001-05-29 | Fujitsu Ltd | 画像処理装置及び画像処理プログラムを格納した記憶媒体 |
| CN101388948A (zh) * | 2007-09-13 | 2009-03-18 | 柯尼卡美能达商用科技株式会社 | 图像处理装置和图像处理方法 |
| CN102063278A (zh) * | 2009-11-16 | 2011-05-18 | 佳能株式会社 | 图像处理装置及图像处理方法 |
| JP2011176556A (ja) * | 2010-02-24 | 2011-09-08 | Ricoh Co Ltd | 画像処理装置、プログラム及び記録媒体 |
| CN102377911A (zh) * | 2010-08-23 | 2012-03-14 | 株式会社东芝 | 图像处理装置、图像处理方法及摄像机模组 |
| WO2013161840A1 (ja) * | 2012-04-26 | 2013-10-31 | 日本電気株式会社 | 画像処理方法、及び画像処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105391913A (zh) | 2016-03-09 |
| US20170257523A1 (en) | 2017-09-07 |
| CN108737687A (zh) | 2018-11-02 |
| US10148854B2 (en) | 2018-12-04 |
| US9692940B2 (en) | 2017-06-27 |
| JP6403490B2 (ja) | 2018-10-10 |
| CN105391913B (zh) | 2018-09-25 |
| US20160057312A1 (en) | 2016-02-25 |
| JP2016046606A (ja) | 2016-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108737687B (zh) | 图像处理装置、图像处理方法和存储介质 | |
| JP5540553B2 (ja) | 画像処理装置、画像形成装置、画像処理方法及び画像処理プログラム | |
| JP4496239B2 (ja) | 画像処理方法、画像処理装置、画像形成装置、画像読取装置、コンピュータプログラム、及び記録媒体 | |
| US20100265549A1 (en) | Image processing apparatus and image processing method | |
| CN106303150B (zh) | 图像处理装置及图像处理装置的控制方法 | |
| US10841457B2 (en) | Image forming apparatus with density correction and edge smoothing, method, and storage medium storing program to perform the method | |
| KR101810285B1 (ko) | 화상 처리 장치, 화상 처리 방법 및 컴퓨터 프로그램 | |
| CN110012193B (zh) | 图像处理装置及其控制方法 | |
| US20150206115A1 (en) | Image processing apparatus and image processing method | |
| US10031435B2 (en) | Color image formation with control for toner amount limiting | |
| JP4814162B2 (ja) | 画像処理装置及び画像処理方法 | |
| JP6648933B2 (ja) | 画像処理装置、画像形成装置、画像処理方法及びプログラム。 | |
| US8537412B2 (en) | Printing control device | |
| JP6163244B2 (ja) | 画像処理装置、画像形成装置、画像処理プログラム及び記録媒体 | |
| JP2007043394A (ja) | 画像処理装置、画像処理方法、およびその方法をコンピュータに実行させるプログラム | |
| JP2007049488A (ja) | 画像処理装置、画像処理方法、およびその方法をコンピュータに実行させるプログラム | |
| JP6045182B2 (ja) | 画像処理装置、およびそれを備えた画像形成装置、コンピュータプログラム及び記録媒体 | |
| US6870640B1 (en) | Method and apparatus for rendering a continuous tone image representation with multiple digital halftoning | |
| JP4958626B2 (ja) | 画像処理方法、画像処理装置、画像形成装置、コンピュータプログラム、及び記録媒体 | |
| JP5050790B2 (ja) | 色処理装置、画像形成装置及びプログラム | |
| JP2017044883A (ja) | 画像形成装置及び画像形成方法 | |
| JP6241048B2 (ja) | 画像形成装置、画像形成方法および画像形成プログラム | |
| JP2000184194A (ja) | 画像形成装置 | |
| JP2000350048A (ja) | カラー画像形成方法及びカラー画像形成装置 | |
| JP2017161672A (ja) | 画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |