CN103038152A - 便携式负载提升系统 - Google Patents
便携式负载提升系统 Download PDFInfo
- Publication number
- CN103038152A CN103038152A CN2011800283325A CN201180028332A CN103038152A CN 103038152 A CN103038152 A CN 103038152A CN 2011800283325 A CN2011800283325 A CN 2011800283325A CN 201180028332 A CN201180028332 A CN 201180028332A CN 103038152 A CN103038152 A CN 103038152A
- Authority
- CN
- China
- Prior art keywords
- lifting arm
- cable
- load
- exoskeleton
- upper body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0006—Exoskeletons, i.e. resembling a human figure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D3/00—Portable or mobile lifting or hauling appliances
- B66D3/18—Power-operated hoists
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
Abstract
一种便携式负载提升辅助系统(100)包含可移动支撑结构以及固定于所述可移动支撑结构的负载提升机构(221),所述可移动支撑结构包含外骨骼躯干(160),所述外骨骼躯干(160)包含构造成耦接于人的上身的外骨骼主干(109),所述负载提升机构(221)包含具有用于卷绕固定于第一和第二末端执行器(223)的第一和第二提升带或缆(222)的马达驱动卷绕机构的绞车(229)。第一和第二手柄(224)附连于所述第一和第二末端执行器的外表面,其中所述提升带或缆当由所述绞车驱动时提升被所述第一和第二末端执行器接触的负载。下肢外骨骼(120)构造成耦接于人的下肢体。所述外骨骼主干通过耦接于所述下肢外骨骼的上身接合装置(150(a))耦接于所述人的上身。
Description
技术领域
公开的具体实施方式涉及便携式负载提升系统。
背景技术
某些工作需要个体重复地提升和携带重负载。这些活动显著地增加了身体上的肌肉-骨骼应力,可能导致损伤,其中有些损伤可能是永久性损伤。
一种已知的负载提升辅助系统利用并入完整关节臂的外骨骼以考虑到上身提升辅助。这些臂具有与使用者的臂类似的运动范围而且需要显著的感知和致动以确保系统跟踪使用者来避免任何不适。另外,可以通过利用支撑使用者上的负载的固定负载附连件携带负载,但却禁止从固定附连点提高或降低负载。
另一种已知的提升辅助系统具有构建在仓库或其他设施的基础结构中的固定负载辅助机构。在这种系统中的提升辅助机构一般永久地附连于固定架空(overhead)门架。因而这种排布限于在仓库或其他设施的限定区域内使用。
发明内容
公开的具体实施方式包含便携式负载提升系统,所述便携式负载提升系统提供耦接于末端执行器的动力辅助带或缆用于提升和携带或移动重负载。在一个具体实施方式中,所述便携式负载提升系统是可以由人类使用者穿着的负载提升辅助系统以通过所述负载提升辅助系统的框架将负载的重量转移到地面或其他下表面(如,地板)。在这个具体实施方式中,附连于所述负载提升辅助系统的负载被外骨骼携带,显著地减少了使用者上的负载,因而减少了肌肉骨骼损伤的风险而且允许使用者携带更多重量。
在本文公开的其他具体实施方式包含独立于下肢(low extremity)外骨骼的便携式负载提升辅助系统。比方说,所述便携式负载提升辅助系统可以像背包一样穿着(如,由带固定于使用者的躯干)。在其他具体实施方式中,所述便携式负载提升系统在无需固定于人类使用者的情况下可操作,这样的系统包含移动单元(如,在轮上的车),该移动单元给系统提供其支撑和便携性。
另外,公开的具体实施方式包含便携式负载提升辅助系统,所述便携式负载提升辅助系统包含允许使用者将负载向上提高到最小肩高同时还提供提升辅助的结构。动力辅助带或缆使使用者能安全地完成一般将需要两个或更多人员去携带负载的任务。末端执行器快速和轻易地被互换以允许诸如盒子、容器或军需品的许多不同物品的提升和携带。公开的便携式负载提升辅助系统具体实施方式考虑到人的正常提升运动范围,而且通过使用公开的肩提升装置,允许使用者将负载提高到肩高以及其之上同时还提供显著的提升辅助。
悬臂重量可以被使用于保持重心靠近使用者以维持平衡和负载的积极控制。在末端执行器内的力传感器能够馈给板载的基于微处理器的控制器以确保系统移动与使用者一致,使由使用者提升的物体能精确放置。通过诸如通过包含在末端执行器上的力传感器检测由使用者输入的力允许公开的便携式负载提升辅助系统也能够检测使用者的意图(提高、降低或稳定),而且通过附连于末端执行器的提升带或缆提供恰当的辅助以执行使用者的意图。
附图说明
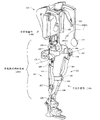
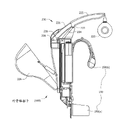
图1是根据公开的具体实施方式的包括下肢外骨骼和外骨骼躯干的用于帮助人类使用者的示例便携式负载提升辅助系统的主视透视图。
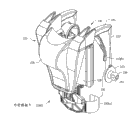
图2显示根据公开的具体实施方式的包含外骨骼主干(trunk)的示例外骨骼躯干,该外骨骼主干具有连接到它的负载提升机构。
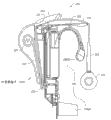
图3描绘根据公开的具体实施方式的示例负载提升杆机构的局部截面绘图。
图4描绘根据公开的具体实施方式的远离使用者身后移动以便于绕髋弯曲-伸展轴(至少部分地)平衡负载的配重,当使用者前面(在末端执行器上)的负载为高时的情况下这是有用的。
图5描绘根据公开的具体实施方式的提升杆沿提升杆导向件的位置,提升杆沿提升杆导向件的位置由安装在提升杆上且在凸轮盘上的槽中移动的凸轮辊子确定,其中提升杆导向件在枢轴上枢转,且滑轮为带跑过其上的滑轮。
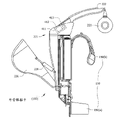
图6为根据公开的具体实施方式的示例提升杆导向件的后端的局部放大图。
图7显示根据另一个公开的具体实施方式的包含允许便携式负载提升辅助系统像背包一样被穿着的提升带的示例便携式负载提升辅助系统的绘图。
图8显示根据另一个公开的具体实施方式的包括包含轮的车的示例便携式负载提升系统,所述车将负载提升机构安装在固定于车的支撑结构上。
具体实施方式
参考所附的附图描述公开的具体实施方式,其中在整个附图中相同的参考数字用于标明相似的或等同的元件。附图没有按比例绘制而且它们仅仅被提供于示出在本文公开的方面。以下参考示例应用描述几个公开的方面用于说明。应理解的是陈述众多具体细节、关系、和方法以提供在本文公开的具体实施方式的全面理解。然而,在相关领域中的一般技术人员会轻而易举地意识到在没有一个或多个所述具体细节或通过其他方法的情况下可以实施公开的具体实施方式。在其他例子中,熟知的结构或操作未详细示出以避免使在本文公开的方面模糊不清。公开的具体实施方式不限于所描绘的动作或事件的顺序,因为一些动作可以按不同顺序发生和/或与其他动作或事件同时发生。而且,不是所有描述的动作或事件都需要根据本公开内容执行一套方法。
公开的便携式负载提升系统包括可移动支撑结构和固定于可移动支撑结构的负载提升机构,所述负载提升机构包括包含用于卷绕固定于第一和第二末端执行器的第一和第二提升带或缆的马达驱动卷绕机构的绞车。第一和第二手柄附连于第一和第二末端执行器的外表面,其中提升带或缆当由绞车驱动时提升被第一和第二末端执行器接触的负载。便携式负载提升系统可以包括用于帮助人类使用者的负载提升辅助系统,负载提升辅助系统包含下肢外骨骼和外骨骼躯干,或者在其他公开的具体实施方式中可以体现成包含外骨骼躯干但不包含下肢外骨骼。其他公开的具体实施方式包括在无需固定于人类使用者的情况下可操作的负载提升系统。
根据一个示例具体实施方式,图1是描绘用于帮助人类使用者的示例便携式负载提升辅助系统100的主视透视图,便携式负载提升辅助系统100包括下肢外骨骼120和包含外骨骼主干109的外骨骼躯干160。便携式负载提升辅助系统100可由人穿着而且允许其穿戴者携带在他/她的前面的负载,而且当提升物体时通过显著地减少使用者上的负载来帮助人。比方说,诸如在用于带着多达130磅的战斗装备进入战斗的士兵的示例军事应用中,便携式负载提升辅助系统100可以使用于帮助提升重负载同时施加最小力气。
除了其他部件之外,下肢外骨骼120包含两个腿支撑件101和102,两个腿支撑件101和102构造成耦接于人的下肢体(lower limb)而且构造成在其站立期的过程中搁置在地面或其他表面(如,地板)上。除了其他部件之外,腿支撑件101和102包含大腿连接件103和104、及小腿连接件105和106。两个膝关节107和108构造成在对应的腿支撑件迈步期的过程中允许在腿支撑件101、102的小腿连接件105和106以及大腿连接件103和104之间的弯曲和伸展。然而,在一些具体实施方式中,两个膝关节107和108构造成在对应的腿支撑件站立期的过程中抵制在腿支撑件101、102的小腿连接件105和106以及大腿连接件103和104之间的弯曲。
与其他部件一起,外骨骼躯干160包括外骨骼主干109。与其他部件一起,外骨骼主干109包括上身接合装置150。外骨骼主干109构造成通过上身接合装置150耦接于人的上身。如在本文所使用的,人的上身指的是通常在大腿之上包含人的臀部的任何位置。上身接合装置150的示例包括一些元件中的一个元件或组合,该一些元件包含但不限于背心、皮带、带、肩带、胸带、躯体模型(body cast)、挽具(harness)、和腰带。
考虑到腿支撑件101和102分别绕髋弯曲-伸展轴151和152的髋弯曲和伸展旋转,外骨骼主干109在髋弯曲-伸展关节125和126处可旋转地连接于腿支撑件101和102。腿支撑件101和102可构造成通过下肢体接合带耦接于人的下肢体,其中右下接合带135显示在图1中(为了清楚起见,左下肢体接合带未显示在图1中)。
在诸如图1所示的一些具体实施方式中,各个下肢体接合带耦接于大腿连接件103和104。在一些具体实施方式中,下肢体接合带耦接于小腿连接件105和106。在一些其它具体实施方式中,下肢体接合带耦接于小腿连接件和大腿连接件两者。每个下肢体接合带可以包括包含但不限于带、杆、c形托架、躯体模型、和弹性体的元件中的一个元件或组合。
在操作时,人耦接于(或穿上)负载提升辅助系统100,包括通过上身接合装置150(在图1中所示的简单的皮带150(a)和肩带150(b))耦接于外骨骼躯干160,及经由通过下肢体接合带135和136耦接于两个腿支撑件101和102而耦接于下肢外骨骼120。在一些具体实施方式中,下肢外骨骼120此外可以包含构造成在外骨骼主干109及腿支撑件101和102之间产生扭矩的两个髋扭矩发生器145和146。
在图1中示出的外骨骼躯干160还包含负载提升机构221。图1中的负载提升机构221具有在其内的绞车229(见图3),绞车229包含可以卷绕带或提升缆222的卷绕机构,带或提升缆222在一个特定的具体实施方式中是尼龙带以便于提升连接于末端执行器223或被末端执行器223接触的负载。
公开的便携式负载提升系统包含动力源(未显示),动力源可以包括电池源、或诸如基于燃料电池动力源的其他动力源。诸如图1中所示的便携式负载提升辅助系统100的公开的便携式负载提升辅助系统对于使用者来说也是容易穿上的。便携式负载提升辅助系统100能够以小包装物折叠获得,致使士兵或其他使用者简单伸出一条腿并且踏入靴体(boot)下的脚床(foot bed)。然后带可以盘绕在士兵或其他使用者的大腿、腰、和肩周围。
图2显示根据公开的具体实施方式的包含外骨骼主干109的示例外骨骼躯干160,外骨骼主干109带有连接到它的负载提升机构221。在图2中,末端执行器223显示为简单的操作杆(paddle),在操作杆上在与手柄224相对的侧上安装高摩擦材料。高摩擦材料用于帮助抓取盒子和盒状物体的侧边。一种示例高摩擦材料的特定示例是“GECKO SKIN”。然而,末端执行器223通常可以是使用于提升负载的任何物品而且可以在手柄224中容纳力传感器251以便于测量人类使用者穿上手柄的负载力。物品225是提升杆,提升杆(此外)作用为用于缆222的导向件。在一个具体实施方式中,负载提升机构221(包含内绞车、带222、末端执行器223和手柄224)可以是有时被称为“人力放大器”的机构。这种“人力放大器”的示例在属于Kazerooni的美国专利6,886,812中被公开。
负载提升机构221还可以包含可移动配重226,可移动配重226可以由配重致动器228(见图4)绕配重旋转轴227(见图3)被旋转。这个特征的一个优势方面是使得配重228的质量(mass)包含绞车229(包含其马达,在图3中由“M”指出)的质量。这能够通过经过图3中示出的路径来规定提升带或缆222的路线完成。带或缆222绕过与配重旋转轴227同轴的滑轮236,并且因此配重228的运动对提升带或缆222的长度(或负载)具有非常少的影响。
在一个具体实施方式中,马达能够包括液压马达。基于液压马达的结构能够高能效地去帮助支撑包含图1中示出的便携式负载提升辅助系统100的公开系统的电池动力操作。
在负载提升机构221的操作时,当使用者前面(在末端执行器223上)的负载为高时,配重226远离使用者身后移动以便于绕髋弯曲-伸展轴151和152(至少部分地)平衡负载。这被显示发生在图4中。这可以通过使用诸如包括耦接于图4所示的力传感器413的微处理器(或微计算机)412的控制器411来完成,力传感器413测量由负载提升机构221施加至提升带或缆222的力。
然后控制器411能够发送控制信号,控制信号触发可移动配重226移动到合适的位置以平衡由配重226绕髋弯曲-伸展轴151和152产生的力矩和因为使用者前面的负载在缆222上由向下的力产生的力矩。本领域的一般技术人员会注意到有许多方式去测量缆222中的力和逼近由绕髋弯曲-伸展轴151和152的力产生的力矩。如果这种估算合理精确而且在外骨骼主干109上绕髋弯曲-伸展轴151和152的净力矩接近零,则对髋扭矩发生器145和146的需要可以大大降低或甚至消除,因为外骨骼躯干160的穿戴者能够提供所需的小量剩余扭矩以保持外骨骼主干109竖直。
本领域的一般技术人员能够构建以不会绕配重旋转轴227旋转的方式在连杆类型机构上线性平移或摆动的可移动配重226。将配重背离(或靠近)髋弯曲-伸展轴151和152移动的任何机构通常将能够产生期望的效果。
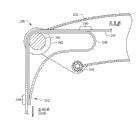
图3描绘根据公开的具体实施方式的与外骨骼躯干160有关的示例负载提升杆机构230的局部截面绘图。负载提升杆机构230包含提升杆225、提升杆导向件231、和凸轮盘232。提升杆225以伸缩方式在提升杆导向件231上滑动。
参见图5,提升杆225沿提升杆导向件231的位置由凸轮辊子233确定,凸轮辊子233安装在提升杆225上而且在凸轮盘232上的槽234中移动。提升杆导向件231在枢轴235上枢转。滑轮236为带或缆222跑过其上的滑轮。当带或缆222充分收回致使末端执行器223在接近提升杆225的末端时,在凸轮辊子233在凸轮盘232上的槽234中向上移动的同时提升杆225开始向上和向外移动。
为理解带或缆222如何使得提升杆225向上和向外移动,图6显示提升杆导向件231的后端的局部放大图。在图6中,可见的是提升带222实际上由两个部分组成,主提升带237和提升带环238。主带237和带环238在区域239和240处附连(如,缝合或粘结)在一起。而且,可见的是滑轮236包括本体241和凸缘242。当带或缆222被拉向绞车229时,最终提升带环238会盘绕在滑轮本体241周围并且开始向下拉滑轮本体。这会使得提升杆导向件231在枢轴235上枢转,在枢轴235上枢转会使得提升杆225向上和向外移动。带环238在提升杆225的末端与末端执行器223之间还有带存在的点处碰到滑轮本体241。如果没有带存在,则提升杆225不可沿提升杆导向件231延伸,因为其会被带或缆222约束。
本领域的一般技术人员会注意到有许多方式去构建仅仅通过对带或缆拖拉的负载提升杆机构230,当带或缆接近其行程的终点时,提升杆会向上和向外移动。这允许外骨骼躯干160的穿戴者将负载向上提升到比收回的提升杆将允许的高得多的高度。
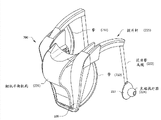
在其他公开的具体实施方式中,便携式负载提升辅助系统没有附连于如上有关于图1-6所描述的下肢外骨骼120。比方说,便携式负载提升辅助系统能够仅包括能够类似背包由使用者穿着的外骨骼躯干160。
图7显示包含带710的示例便携式负载提升辅助系统700的绘图,带710允许包括外骨骼主干109的便携式负载提升辅助系统700像背包一样被使用者穿着。可移动配重226在图7中由其功能“相抵平衡机构”标识。
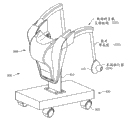
在又一个具体实施方式中,便携式负载提升系统能够附连于移动单元。图8显示包括包含轮825的车820的示例性便携式负载提升系统800,车820将示例负载提升系统840安装在可移动支撑结构810上(如,螺接或焊接),可移动支撑结构810固定于车820。可移动支撑结构810通过车820具有移动性。便携式负载提升系统800以及公开的便携式负载提升辅助系统能够使用于支撑多种应用,包含军事、工业和医疗应用,在战斗中辅助士兵。
公开的便携式负载提升系统的优势包含致动的简易性以及迁移到交替的工作或其他地区的灵活性。不像完整关节臂,公开的具体实施方式能够使用最小感知和致动能力。这相比关节臂减少了成本和动力需求,而且提高了设计的可靠性。而且,不像已知的固定负载附连件,在本文公开的负载提升系统考虑到负载的提高和降低。比方说,诸如士兵的使用者使用公开的便携式提升辅助系统能够将负载提高在他或她的肩之上,以及将负载降低至地面。
而且,不像已知的集成且因此固定到建筑物基础结构中的架空提升装置,在本文公开的便携式负载提升系统在其使用上具有显著增强的灵活性。因为公开的负载提升系统没有物理地约束于工作地区,使用者能够一会在仓库内部操作负载提升系统,然后直接到外面而且继续操作负载提升系统。这以较低的成本和用较少的动力消耗为使用者提供了大得多的实用性。
虽然以上已描述了多种公开的具体实施方式,但应理解的是它们仅通过示例的方式已被呈现且不作为限制。在不脱离本公开内容的精神或范围的情况下能够根据本文中的公开内容对公开的具体实施方式进行众多改变。因此,本公开内容的幅度和范围不应该限于上述具体实施方式的任何一个。相反,本公开内容的范围应该根据随后的权利要求及其等同物被限定。
尽管关于一个或多个实现方式已经阐明和描述公开的具体实施方式,但是对于本领域的技术人员而言在阅读和理解本说明书和所附的附图之后将产生等同变化和变型。虽然关于几种实现方式中的仅一个已公开特定特征,但是可以将这种特征与可能是对于任何给定的或特定的应用有利的和期望的其他实现方式中的一个或多个其他特征结合。
Claims (21)
1.便携式负载提升系统,其包括:
可移动支撑结构;
固定于所述可移动支撑结构的负载提升机构,所述负载提升机构包括包含用于卷绕固定于第一和第二末端执行器的第一和第二提升带或缆的马达驱动卷绕机构的绞车;以及
附连于所述第一和第二末端执行器的外表面的第一和第二手柄,其中所述带或缆当由所述绞车驱动时提升被所述第一和第二末端执行器接触的负载。
2.权利要求1所述的系统,其中所述可移动支撑结构包括外骨骼躯干,所述外骨骼躯干包含构造成通过上身接合装置耦接于人的上身的外骨骼主干。
3.权利要求2所述的系统,其中所述上身接合装置包括背心、皮带、肩带、胸带、躯体模型、挽具、或腰带。
4.权利要求1所述的系统,进一步包括在所述第一和第二手柄中的第一和第二力传感器,其中所述第一和第二力传感器测量人用于所述第一和第二手柄上的负载力。
5.权利要求1所述的系统,进一步包括用于导引所述提升带或缆的提升杆。
6.权利要求1所述的系统,进一步包括可移动配重,所述可移动配重通过配重致动器绕配重旋转轴可旋转致使所述配重的质量包含所述绞车的质量。
7.权利要求6所述的系统,进一步包括包含微处理器或微计算机的控制器和测量由所述负载提升机构施加至所述提升带或缆的力的力传感器,
其中所述控制器可工作于发送控制信号,所述控制信号控制所述可移动配重的位置到合适位置以平衡由所述配重绕髋弯曲-伸展轴产生的力矩和在人前面的所述提升带或缆上由向下的力产生的力矩。
8.权利要求1所述的系统,进一步包括负载提升杆机构,所述负载提升杆机构包括第一和第二提升杆,其专门通过拖拉所述提升带或缆,当所述提升带或缆接近其行程的终点时所述第一和所述第二提升杆会向上和向外移动。
9.权利要求8所述的系统,进一步包括提升杆导向件、和凸轮盘,其中所述提升杆以伸缩方式在所述提升杆导向件上滑动,以及
所述提升杆沿所述提升杆导向件的位置由安装在所述提升杆上并在所述凸轮盘上的槽中移动的凸轮辊子确定,所述提升杆导向件在枢轴上枢转,以及
滑轮,所述提升带或缆跑过所述滑轮,
其中当所述提升带或缆充分收回致使所述第一和第二执行器在接近所述提升杆的末端时,在所述凸轮辊子在所述凸轮盘上的所述槽中向上移动的同时所述提升杆开始向上和向外移动。
10.权利要求1所述的系统,其中所述可移动支撑结构安装在移动单元上。
11.权利要求10所述的系统,其中所述移动单元包含轮。
12.权利要求1所述的系统,进一步包括构造成耦接于人的下肢体的下肢外骨骼,其中所述可移动支撑结构包括外骨骼躯干,所述外骨骼躯干包含构造成通过上身接合装置耦接于所述人的上身的外骨骼主干,所述上身接合装置耦接于所述下肢外骨骼。
13.权利要求12所述的系统,其中所述下肢外骨骼包括腿支撑件,并且所述外骨骼主干在髋弯曲-伸展关节处可旋转地连接于所述腿支撑件,用于腿支撑件绕髋弯曲-伸展轴的髋弯曲和伸展旋转。
14.权利要求1所述的系统,其中所述马达包括液压马达。
15.便携式负载提升辅助系统,其包括:
包括外骨骼躯干的可移动支撑结构,所述外骨骼躯干包含构造成耦接于人的上身的外骨骼主干;
固定于所述可移动支撑结构的负载提升机构,所述负载提升机构包括包含用于卷绕固定于第一和第二末端执行器的第一和第二提升带或缆的马达驱动卷绕机构的绞车;
附连于所述第一和第二末端执行器的外表面的第一和第二手柄,其中所述带或缆当由所述绞车驱动时提升被所述第一和第二末端执行器接触的负载;以及
构造成耦接于人的下肢体的下肢外骨骼,
其中所述外骨骼主干通过耦接于所述下肢外骨骼的上身接合装置耦接于所述人的上身。
16.权利要求15所述的系统,进一步包括在所述第一和第二手柄中的第一和第二力传感器,其中所述第一和第二力传感器测量所述人用于所述第一和第二手柄上的负载力。
17.权利要求15所述的系统,进一步包括可移动配重,所述可移动配重通过配重致动器绕配重旋转轴可旋转致使所述配重的质量包含所述绞车的质量。
18.权利要求17所述的系统,进一步包括包含微处理器或微计算机的控制器和测量由所述负载提升机构施加至所述提升带或缆的力的力传感器,
其中所述控制器可工作于发送控制信号,所述控制信号控制所述可移动配重的位置到合适位置以大约平衡由所述配重绕髋弯曲-伸展轴产生的力矩和在所述人前面的所述提升带或缆上由向下的力产生的力矩。
19.权利要求15所述的系统,进一步包括负载提升杆机构,所述负载提升杆机构包括第一和第二提升杆,其专门通过拖拉所述提升带或缆,当所述提升带或缆接近其行程的终点时所述第一和所述第二提升杆会向上和向外移动。
20.权利要求19所述的系统,进一步包括提升杆导向件、和凸轮盘,其中所述提升杆以伸缩方式在所述提升杆导向件上滑动,以及
所述提升杆沿所述提升杆导向件的位置由安装在所述提升杆上并在所述凸轮盘上的槽中移动的凸轮辊子确定,所述提升杆导向件在枢轴上枢转,以及
滑轮,所述提升带或缆跑过所述滑轮,
其中当所述提升带或缆充分收回致使所述第一和第二执行器在接近所述提升杆的末端时,在所述凸轮辊子在所述凸轮盘上的所述槽中向上移动的同时所述提升杆开始向上和向外移动。
21.权利要求20所述的系统,其中所述下肢外骨骼包括腿支撑件,并且所述外骨骼主干在髋弯曲-伸展关节处可旋转地连接于所述腿支撑件,用于腿支撑件绕髋弯曲-伸展轴的髋弯曲和伸展旋转。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US32268410P | 2010-04-09 | 2010-04-09 | |
| US61/322684 | 2010-04-09 | ||
| PCT/US2011/031956 WO2011127471A1 (en) | 2010-04-09 | 2011-04-11 | Portable load lifting system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN103038152A true CN103038152A (zh) | 2013-04-10 |
Family
ID=44763313
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2011800283325A Pending CN103038152A (zh) | 2010-04-09 | 2011-04-11 | 便携式负载提升系统 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9333644B2 (zh) |
| EP (1) | EP2556010B1 (zh) |
| JP (1) | JP6008836B2 (zh) |
| CN (1) | CN103038152A (zh) |
| WO (1) | WO2011127471A1 (zh) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103284819A (zh) * | 2013-04-24 | 2013-09-11 | 西南交通大学 | 一种助力型外骨骼用前抬式可调节背负系统 |
| CN105853145A (zh) * | 2016-04-12 | 2016-08-17 | 合肥工业大学 | 一种可实现履步功能的腿部机械机构 |
| CN106628806A (zh) * | 2017-02-28 | 2017-05-10 | 深圳龙海特机器人科技有限公司 | 双开穿戴式辅助搬运装置 |
| WO2018082512A1 (zh) * | 2016-11-02 | 2018-05-11 | 刘美君 | 一种提供腰背部力量辅助的气电联动式外骨骼动力装备 |
| CN109081038A (zh) * | 2018-09-18 | 2018-12-25 | 上海工程技术大学 | 一种穿戴式省力装置 |
| WO2019047898A1 (zh) * | 2017-09-07 | 2019-03-14 | 袁博 | 一种外骨骼 |
| CN110575366A (zh) * | 2019-09-19 | 2019-12-17 | 哈尔滨工业大学 | 一种主被动结合的下肢助力外骨骼机器人 |
| CN110740967A (zh) * | 2017-06-29 | 2020-01-31 | 株式会社久保田 | 货物保持用的手部以及协助器具 |
| CN111148606A (zh) * | 2017-09-28 | 2020-05-12 | 奥索冰岛有限公司 | 身体接合装置 |
| CN111285280A (zh) * | 2020-02-02 | 2020-06-16 | 高昊天 | 一种背负式电力高空作业传递装置 |
| CN114833804A (zh) * | 2022-06-13 | 2022-08-02 | 山东瑞曼智能装备有限公司 | 一种适用于多场景的有源助力装置及方法 |
| CN114932536A (zh) * | 2022-05-31 | 2022-08-23 | 山东大学 | 可行走的主动式机械装置 |
Families Citing this family (93)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9656117B2 (en) | 2009-06-19 | 2017-05-23 | Tau Orthopedics, Llc | Wearable resistance garment with power measurement |
| US10124205B2 (en) | 2016-03-14 | 2018-11-13 | Tau Orthopedics, Llc | Toning garment with modular resistance unit docking platforms |
| EP2484317B1 (en) * | 2009-09-28 | 2019-05-22 | Tokyo University Of Science Educational Foundation Administrative Organization | Lumbar support device |
| FR2978690A1 (fr) * | 2011-08-02 | 2013-02-08 | Pierre Andre Davezac | Exosquelette de levage et de portage de charges |
| JP6169837B2 (ja) * | 2011-11-02 | 2017-07-26 | パナソニック株式会社 | 下肢動作支援装置 |
| US20130145530A1 (en) * | 2011-12-09 | 2013-06-13 | Manu Mitra | Iron man suit |
| US9095981B2 (en) | 2012-01-11 | 2015-08-04 | Garrett W. Brown | Load and torque resistant caliper exoskeleton |
| CN102805915A (zh) * | 2012-08-06 | 2012-12-05 | 陈建瑜 | 一种智能助力系统 |
| AU2013359408A1 (en) | 2012-12-11 | 2014-06-19 | Ekso Bionics, Inc. | Reconfigurable exoskeleton |
| CN103006416B (zh) * | 2013-01-04 | 2014-08-20 | 哈尔滨工程大学 | 机械式下肢康复机器人助行装置 |
| AU2014240405B2 (en) * | 2013-03-14 | 2018-06-14 | Ekso Bionics, Inc. | Non-anthropomorphic hip joint locations for exoskeletons |
| JP6284318B2 (ja) * | 2013-08-30 | 2018-02-28 | 三菱重工業株式会社 | パワーアシストスーツ |
| JP6284319B2 (ja) * | 2013-08-30 | 2018-02-28 | 三菱重工業株式会社 | パワーアシストスーツ |
| KR101500525B1 (ko) * | 2013-10-16 | 2015-03-09 | 대우조선해양 주식회사 | 산업용 착용로봇의 접이식 작업유닛 |
| ITFR20130013A1 (it) * | 2013-11-25 | 2015-05-26 | Marco Ceccarelli | Dispositivo ad esoscheletro per assistenza alla locomozione umana. |
| JP5902664B2 (ja) * | 2013-12-25 | 2016-04-13 | ファナック株式会社 | 保護部材を有する人協調型産業用ロボット |
| FR3016821B1 (fr) * | 2014-01-29 | 2019-08-02 | Robotiques 3 Dimensions | Exosquelette a port frontal et procede d'utilisation d'un tel exosquelette. |
| JP6184355B2 (ja) * | 2014-03-20 | 2017-08-23 | 株式会社クボタ | アシストスーツ |
| JP6148192B2 (ja) * | 2014-03-20 | 2017-06-14 | 株式会社クボタ | アシストスーツ |
| JP6153881B2 (ja) * | 2014-03-20 | 2017-06-28 | 株式会社クボタ | アシストスーツ |
| EP3119369A4 (en) * | 2014-03-21 | 2017-11-29 | Ekso Bionics, Inc. | Ambulatory exoskeleton and method of relocating exoskeleton |
| EP3151804B1 (en) * | 2014-06-04 | 2023-01-11 | Ekso Bionics, Inc. | Exoskeleton and method of increasing the flexibility of an exoskeleton hip joint |
| WO2015192240A1 (en) | 2014-06-18 | 2015-12-23 | Mawashi Protective Clothing Inc. | Exoskeleton and method of using the same |
| US9808073B1 (en) * | 2014-06-19 | 2017-11-07 | Lockheed Martin Corporation | Exoskeleton system providing for a load transfer when a user is standing and kneeling |
| CN104013514B (zh) * | 2014-06-19 | 2017-02-15 | 中国北方车辆研究所 | 一种液压驱动的可穿戴式人体助力行走机器人 |
| KR102250235B1 (ko) * | 2014-07-17 | 2021-05-10 | 삼성전자주식회사 | 고정 모듈 및 이를 포함하는 운동 보조 장치 |
| US20160158593A1 (en) * | 2014-12-04 | 2016-06-09 | Florida Institute for Human and Machine Cognition | Exoskeleton-Based Exercise and Training Device |
| JP6504823B2 (ja) * | 2015-01-14 | 2019-04-24 | 株式会社クボタ | アシストスーツ |
| JP2016129917A (ja) * | 2015-01-14 | 2016-07-21 | 株式会社クボタ | アシストスーツ |
| JP2016130160A (ja) * | 2015-01-14 | 2016-07-21 | 株式会社クボタ | アシストスーツ |
| KR102196104B1 (ko) | 2015-01-14 | 2020-12-30 | 가부시끼 가이샤 구보다 | 어시스트 슈트 |
| JP6548394B2 (ja) * | 2015-01-14 | 2019-07-24 | 株式会社クボタ | アシストスーツ |
| CN104669249B (zh) * | 2015-02-01 | 2016-05-04 | 襄阳新火炬科技有限公司 | 一种液压驱动式机器人 |
| EP3064822B1 (en) * | 2015-03-02 | 2018-05-30 | Easyrig AB | Camera rig |
| US10390973B2 (en) | 2015-05-11 | 2019-08-27 | The Hong Kong Polytechnic University | Interactive exoskeleton robotic knee system |
| WO2016187275A1 (en) * | 2015-05-18 | 2016-11-24 | The Regents Of The University Of California | Method and apparatus for human arm supporting exoskeleton |
| US10548800B1 (en) | 2015-06-18 | 2020-02-04 | Lockheed Martin Corporation | Exoskeleton pelvic link having hip joint and inguinal joint |
| US10195736B2 (en) | 2015-07-17 | 2019-02-05 | Lockheed Martin Corporation | Variable force exoskeleton hip joint |
| US10518404B2 (en) | 2015-07-17 | 2019-12-31 | Lockheed Martin Corporation | Variable force exoskeleton hip joint |
| CN105105896B (zh) * | 2015-09-17 | 2016-11-30 | 武汉大学 | 用于穿戴式下肢外骨骼机器人与人体腰部固定的调节装置 |
| WO2017075462A1 (en) | 2015-10-30 | 2017-05-04 | Ekso Bionics, Inc. | Human exoskeleton devices for heavy tool support and use |
| JP6541552B2 (ja) * | 2015-11-20 | 2019-07-10 | 株式会社クボタ | アシストスーツ |
| JP6541553B2 (ja) * | 2015-11-20 | 2019-07-10 | 株式会社クボタ | アシストスーツ |
| JP6754563B2 (ja) * | 2015-11-20 | 2020-09-16 | 株式会社クボタ | アシストスーツ |
| KR102062998B1 (ko) | 2015-11-20 | 2020-01-06 | 가부시끼 가이샤 구보다 | 어시스트 슈트 |
| JP6643874B2 (ja) * | 2015-11-20 | 2020-02-12 | 株式会社クボタ | アシストスーツ |
| US10912346B1 (en) | 2015-11-24 | 2021-02-09 | Lockheed Martin Corporation | Exoskeleton boot and lower link |
| US10124484B1 (en) | 2015-12-08 | 2018-11-13 | Lockheed Martin Corporation | Load-bearing powered exoskeleton using electromyographic control |
| US20190344432A1 (en) | 2015-12-24 | 2019-11-14 | Safran Electronics & Defense | Modular exoskeleton structure that provides force assistance to the user |
| FR3046038B1 (fr) * | 2015-12-24 | 2017-12-22 | Sagem Defense Securite | Module de support de sac a dos pour une structure modulaire d'exosquelette |
| FR3046051B1 (fr) * | 2015-12-24 | 2020-11-13 | Sagem Defense Securite | Module de dos pour une structure d'exosquelette |
| JP6671180B2 (ja) * | 2016-01-15 | 2020-03-25 | 株式会社クボタ | アシスト器具 |
| CN108430714B (zh) | 2016-01-15 | 2021-06-08 | 株式会社久保田 | 辅助器具 |
| JP6671179B2 (ja) * | 2016-01-15 | 2020-03-25 | 株式会社クボタ | アシスト器具 |
| US11209121B2 (en) * | 2016-04-26 | 2021-12-28 | The Boeing Company | Lifting support device and method of controlling operation |
| JP2018002333A (ja) * | 2016-06-28 | 2018-01-11 | 株式会社クボタ | アシストスーツ |
| JP6566912B2 (ja) * | 2016-06-28 | 2019-08-28 | 株式会社クボタ | アシストスーツ |
| EP3560664A4 (en) * | 2016-12-22 | 2020-09-30 | Kubota Corporation | AUXILIARY TOOL |
| FR3061445B1 (fr) * | 2016-12-29 | 2019-05-24 | Safran Electronics & Defense | Dispositif de liaison pour structure d'exosquelette facilitant le portage de charges pendant la marche ou la course |
| CN106821689B (zh) * | 2017-01-19 | 2023-07-04 | 武汉云云天下信息科技有限公司 | 一种可穿戴式人体外骨骼机器人 |
| JP2018149624A (ja) * | 2017-03-13 | 2018-09-27 | パナソニック株式会社 | 動作支援装置 |
| JP6783171B2 (ja) * | 2017-03-23 | 2020-11-11 | 株式会社クボタ | アシスト器具 |
| JP6742274B2 (ja) * | 2017-05-18 | 2020-08-19 | 株式会社クボタ | アシストスーツ |
| JP2017149585A (ja) * | 2017-05-30 | 2017-08-31 | 株式会社クボタ | アシストスーツ |
| CA3073504A1 (en) | 2017-08-30 | 2019-03-07 | Lockheed Martin Corporation | Automatic sensor selection |
| CN107569367B (zh) * | 2017-10-18 | 2021-09-17 | 房倩玉 | 一种下肢康复训练设备 |
| US10835443B2 (en) * | 2017-11-13 | 2020-11-17 | Free Bionics Taiwan Inc. | Exoskeleton robot |
| DE102018103300A1 (de) * | 2018-02-14 | 2019-08-14 | Noonee Ag | Tragbare Sitzhaltungshilfevorrichtung |
| USD947388S1 (en) * | 2018-12-10 | 2022-03-29 | Jtekt Corporation | Motion assisting device |
| JP6758364B2 (ja) * | 2018-12-25 | 2020-09-23 | 株式会社クボタ | アシストスーツ |
| US10765911B1 (en) | 2019-03-01 | 2020-09-08 | Dustin Hamoy | Core exercise assembly |
| JP6749443B2 (ja) * | 2019-03-07 | 2020-09-02 | 株式会社クボタ | アシストスーツ |
| JP6756002B2 (ja) * | 2019-05-07 | 2020-09-16 | 株式会社クボタ | アシストスーツ |
| JP7240264B2 (ja) | 2019-06-12 | 2023-03-15 | Kyb株式会社 | 電動パワーステアリング装置 |
| JP7427321B2 (ja) * | 2019-06-18 | 2024-02-05 | 株式会社キトー | 動力制御装置および動力制御方法 |
| KR102422726B1 (ko) * | 2019-11-27 | 2022-07-20 | 피씨오낙(주) | 유아 캐리어 또는 물품운송장치 |
| RU198903U1 (ru) * | 2020-02-26 | 2020-07-31 | ООО "Экзомед" | Экзоскелет |
| US12029699B2 (en) | 2020-03-19 | 2024-07-09 | Suitx, Inc. | Remote center shoulder joint for shoulder supporting exoskeleton |
| JP7505266B2 (ja) * | 2020-05-25 | 2024-06-25 | 株式会社ジェイテクト | アシスト装置 |
| RU202647U1 (ru) * | 2020-06-11 | 2021-03-01 | Общество с ограниченной ответственностью "Экзомед" | Устройство для облегчения перетаскивания грузов |
| EP4015156A1 (en) * | 2020-12-15 | 2022-06-22 | Auxivo AG | Load supporting device and its use |
| CN112936232B (zh) * | 2021-04-08 | 2022-10-28 | 中国科学技术大学 | 一种辅助潜水的髋关节外骨骼机器人系统 |
| EP4079460A1 (de) * | 2021-04-22 | 2022-10-26 | Hilti Aktiengesellschaft | System, kit und elektronisches modul zum ausgleich einer gewichtskraft eines gegenstands |
| FR3125453A1 (fr) * | 2021-07-26 | 2023-01-27 | Hublex | Dispositif d’assistance au port manuel de charges |
| CN113894771A (zh) * | 2021-08-27 | 2022-01-07 | 北京机械设备研究所 | 一种主动拉带式上肢助力外骨骼 |
| US12096841B2 (en) | 2021-11-12 | 2024-09-24 | MulePro Industries LLC | Tank carrier with backpack straps and dolly |
| WO2023086541A1 (en) * | 2021-11-12 | 2023-05-19 | Hamon Richard A | Ladder hoist and cart system |
| US20230203888A1 (en) * | 2021-12-29 | 2023-06-29 | MulePro Industries LLC | Building Ladder Hoist |
| DE102022100204A1 (de) * | 2022-01-05 | 2023-07-06 | J.Schmalz Gmbh | Anziehbare Hilfsvorrichtung mit gelenkiger Anbindung der oberen Körperanbindung |
| DE102022100203A1 (de) * | 2022-01-05 | 2023-07-06 | J.Schmalz Gmbh | Anziehbare Hilfsvorrichtung mit gelenkiger Anbindung der unteren Körperanbindung |
| CN114643571B (zh) * | 2022-03-14 | 2023-07-21 | 南京赤研科技有限公司 | 一种全自由度上肢外骨骼装置 |
| CN115302493B (zh) * | 2022-07-25 | 2024-10-22 | 重庆理工大学 | 摩擦阻尼驱动器及外骨骼 |
| WO2024039310A1 (en) * | 2022-08-16 | 2024-02-22 | Interact Medikal Teknolojileri Anonim Sirketi | Adjustable passive exoskeleton |
Family Cites Families (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2010482A (en) * | 1934-05-26 | 1935-08-06 | Florence M Henn | Walking motion |
| FR2249997B1 (zh) * | 1973-10-31 | 1979-03-09 | Pomeret Jean Claude | |
| AT351794B (de) | 1977-11-10 | 1979-08-10 | Philips Nv | Schlingfederkupplung |
| US5016869A (en) * | 1989-07-05 | 1991-05-21 | Applied Motion | Human bipedal locomotion device |
| JPH03105191U (zh) * | 1990-02-15 | 1991-10-31 | ||
| US5020790A (en) * | 1990-10-23 | 1991-06-04 | Board Of Supervisors Of Louisiana State University And Agricultural And Mechanical College | Powered gait orthosis |
| JP3024978U (ja) * | 1995-10-13 | 1996-06-07 | 吉村 敏正 | 背負い式荷物持ち上げ装置 |
| US5865426A (en) * | 1996-03-27 | 1999-02-02 | Kazerooni; Homayoon | Human power amplifier for vertical maneuvers |
| US5993404A (en) | 1998-06-16 | 1999-11-30 | Mc Niel; Frank T. | Walking brace |
| US6386513B1 (en) | 1999-05-13 | 2002-05-14 | Hamayoon Kazerooni | Human power amplifier for lifting load including apparatus for preventing slack in lifting cable |
| US7153242B2 (en) | 2001-05-24 | 2006-12-26 | Amit Goffer | Gait-locomotor apparatus |
| JP2003104682A (ja) * | 2001-09-30 | 2003-04-09 | Kosho Unyu Kk | 荷物移動補助具 |
| US20030073552A1 (en) | 2001-10-11 | 2003-04-17 | Knight Michael W. | Biosensory ergonomic chair |
| US20030115954A1 (en) | 2001-12-07 | 2003-06-26 | Vladimir Zemlyakov | Upper extremity exoskeleton structure and method |
| US20030109817A1 (en) | 2001-12-11 | 2003-06-12 | Shimon Berl | Supplementary knee support brace |
| US6913583B2 (en) | 2003-06-19 | 2005-07-05 | Creations By B J H, Llc | Orthopedic device allows kneeling without contacting knee |
| US7163518B1 (en) | 2003-10-20 | 2007-01-16 | Rgpartnership Llp | Walking leg support |
| US7628766B1 (en) | 2003-10-29 | 2009-12-08 | The Regents Of The University Of California | Lower extremity enhancer |
| US20050137717A1 (en) | 2003-12-18 | 2005-06-23 | Finn Gramnas | Prosthetic foot with rocker member |
| US7571839B2 (en) | 2004-05-19 | 2009-08-11 | Hrl Laboratories, Llc | Passive exoskeleton |
| US7429253B2 (en) * | 2004-09-21 | 2008-09-30 | Honda Motor Co., Ltd. | Walking assistance system |
| CA2601220C (en) | 2005-01-18 | 2014-03-18 | The Regents Of The University Of California | Lower extremity exoskeleton |
| US20070123997A1 (en) | 2005-03-31 | 2007-05-31 | Massachusetts Institute Of Technology | Exoskeletons for running and walking |
| AU2006236579B2 (en) | 2005-04-13 | 2011-09-22 | The Regents Of The University Of California | Semi-powered lower extremity exoskeleton |
| AU2007223733B2 (en) | 2006-03-09 | 2013-01-10 | The Regents Of The University Of California | Power generating leg |
| US8849457B2 (en) * | 2006-07-17 | 2014-09-30 | Raytheon Company | Contact displacement actuator system |
| WO2008129096A1 (es) | 2007-04-23 | 2008-10-30 | Golden Crab, S.L. | Exoesqueleto de seguridad y control para la práctica del esquí de nieve |
| JP5152852B2 (ja) * | 2007-06-07 | 2013-02-27 | 学校法人東京理科大学 | 腰部補助装置 |
| WO2010019300A1 (en) | 2008-05-20 | 2010-02-18 | University Of California At Berkeley | Device and method for decreasing oxygen consumption of a person during steady walking by use of a load-carrying exoskeleton |
| EP2326288B1 (en) | 2008-05-20 | 2016-04-20 | Ekso Bionics, Inc. | Device and method for decreasing energy consumption of a person by use of a lower extremity exoskeleton |
| CA2727292C (en) | 2008-06-11 | 2015-03-31 | Homayoon Kazerooni | External walking assist device for those with lower leg injuries |
| US9351855B2 (en) | 2008-06-16 | 2016-05-31 | Ekso Bionics, Inc. | Powered lower extremity orthotic and method of operation |
| WO2010005473A1 (en) | 2008-06-16 | 2010-01-14 | Berkeley Bionics | Semi-actuated transfemoral prosthetic knee |
| CN102098986B (zh) | 2008-07-23 | 2015-09-09 | 伯克利仿生技术公司 | 外骨骼和控制该外骨骼的迈步腿的方法 |
| EP2337527A1 (en) * | 2008-08-28 | 2011-06-29 | Raytheon Sarcos, LLC | A biomimetic mechanical joint |
| US9011354B2 (en) | 2008-09-24 | 2015-04-21 | Ekso Bionics, Inc. | Hip and knee actuation systems for lower limb orthotic devices |
| JP5235838B2 (ja) | 2008-11-06 | 2013-07-10 | 本田技研工業株式会社 | 歩行補助装置 |
| US8672865B2 (en) | 2008-11-26 | 2014-03-18 | Toad Medical Corporation | Weight-bearing lower extremity brace |
| CN102256580B (zh) | 2008-12-18 | 2014-01-29 | 伯克利仿生技术公司 | 可穿用式物料操作系统 |
| KR101073525B1 (ko) | 2009-01-12 | 2011-10-17 | 한양대학교 산학협력단 | 하지근력지원용 착용형 로봇 |
| JP5379304B2 (ja) | 2009-07-01 | 2013-12-25 | レックス バイオニクス リミテッド | 移動補助器械用制御システム |
| EP2555720B1 (en) | 2010-04-07 | 2017-04-12 | B-Temia Inc. | Load distribution device for human joints |
| WO2011127421A1 (en) | 2010-04-09 | 2011-10-13 | Berkeley Bionics | Exoskeleton load handling system and method of use |
| EP2616115B1 (en) | 2010-09-17 | 2016-08-24 | Ekso Bionics | Human machine interface for human exoskeleton |
| EP2621416B1 (en) | 2010-09-27 | 2017-05-10 | Vanderbilt University | Movement assistance device |
| EP2624786B1 (en) | 2010-10-06 | 2019-12-04 | Ekso Bionics | Human machine interfaces for lower extremity orthotics |
| WO2012125562A1 (en) | 2011-03-11 | 2012-09-20 | Iwalk, Inc. | Biomimetic joint actuators |
| WO2012154580A1 (en) | 2011-05-06 | 2012-11-15 | Equipois Inc. | Exoskeleton arm interface |
| US9682005B2 (en) | 2012-02-24 | 2017-06-20 | Massachusetts Institute Of Technology | Elastic element exoskeleton and method of using same |
| US20140046234A1 (en) | 2012-08-09 | 2014-02-13 | Egas Jose-Joaquim DeSousa | Dynamic Load Bearing Shock Absorbing Exoskeletal Knee Brace |
| US9662261B2 (en) | 2013-01-16 | 2017-05-30 | Ekso Bionics, Inc. | Fail-safe system for exoskeleton joints |
-
2011
- 2011-04-11 CN CN2011800283325A patent/CN103038152A/zh active Pending
- 2011-04-11 US US13/084,265 patent/US9333644B2/en not_active Expired - Fee Related
- 2011-04-11 EP EP11766862.4A patent/EP2556010B1/en active Active
- 2011-04-11 WO PCT/US2011/031956 patent/WO2011127471A1/en active Application Filing
- 2011-04-11 JP JP2013504019A patent/JP6008836B2/ja not_active Expired - Fee Related
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103284819A (zh) * | 2013-04-24 | 2013-09-11 | 西南交通大学 | 一种助力型外骨骼用前抬式可调节背负系统 |
| CN103284819B (zh) * | 2013-04-24 | 2015-08-19 | 西南交通大学 | 一种助力型外骨骼用前抬式可调节背负系统 |
| CN105853145A (zh) * | 2016-04-12 | 2016-08-17 | 合肥工业大学 | 一种可实现履步功能的腿部机械机构 |
| CN105853145B (zh) * | 2016-04-12 | 2020-10-09 | 合肥工业大学 | 一种可实现履步功能的腿部机械机构 |
| WO2018082512A1 (zh) * | 2016-11-02 | 2018-05-11 | 刘美君 | 一种提供腰背部力量辅助的气电联动式外骨骼动力装备 |
| CN106628806A (zh) * | 2017-02-28 | 2017-05-10 | 深圳龙海特机器人科技有限公司 | 双开穿戴式辅助搬运装置 |
| CN110740967A (zh) * | 2017-06-29 | 2020-01-31 | 株式会社久保田 | 货物保持用的手部以及协助器具 |
| US11730621B2 (en) | 2017-09-07 | 2023-08-22 | Bo Yuan | Exoskeleton |
| WO2019047898A1 (zh) * | 2017-09-07 | 2019-03-14 | 袁博 | 一种外骨骼 |
| CN110202543A (zh) * | 2017-09-07 | 2019-09-06 | 重庆市牛迪科技发展有限公司 | 一种外骨骼 |
| CN111148606A (zh) * | 2017-09-28 | 2020-05-12 | 奥索冰岛有限公司 | 身体接合装置 |
| CN109081038A (zh) * | 2018-09-18 | 2018-12-25 | 上海工程技术大学 | 一种穿戴式省力装置 |
| CN110575366A (zh) * | 2019-09-19 | 2019-12-17 | 哈尔滨工业大学 | 一种主被动结合的下肢助力外骨骼机器人 |
| CN111285280A (zh) * | 2020-02-02 | 2020-06-16 | 高昊天 | 一种背负式电力高空作业传递装置 |
| CN111285280B (zh) * | 2020-02-02 | 2021-08-31 | 广西电网有限责任公司北海供电局 | 一种背负式电力高空作业传递装置 |
| CN114932536A (zh) * | 2022-05-31 | 2022-08-23 | 山东大学 | 可行走的主动式机械装置 |
| CN114833804A (zh) * | 2022-06-13 | 2022-08-02 | 山东瑞曼智能装备有限公司 | 一种适用于多场景的有源助力装置及方法 |
| CN114833804B (zh) * | 2022-06-13 | 2024-09-13 | 山东瑞曼智能装备有限公司 | 一种适用于多场景的有源助力装置及方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2556010A1 (en) | 2013-02-13 |
| JP2013531593A (ja) | 2013-08-08 |
| US20110264014A1 (en) | 2011-10-27 |
| EP2556010A4 (en) | 2014-06-25 |
| US9333644B2 (en) | 2016-05-10 |
| EP2556010B1 (en) | 2015-11-25 |
| WO2011127471A1 (en) | 2011-10-13 |
| JP6008836B2 (ja) | 2016-10-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103038152A (zh) | 便携式负载提升系统 | |
| CN110575366B (zh) | 一种主被动结合的下肢助力外骨骼机器人 | |
| JP2013531593A5 (zh) | ||
| CN108014001B (zh) | 一种柔性助行外骨骼 | |
| CA2796088C (en) | Exoskeleton load handling system and method of use | |
| AU2017322238B2 (en) | Methods and apparatus for body weight support system | |
| CN107486842A (zh) | 一种穿戴式髋关节柔性助力外衣 | |
| CN110328657A (zh) | 一种柔性外骨骼助力机器人 | |
| WO2021238293A1 (zh) | 可穿戴式绳驱动机械臂系统 | |
| CN111150615B (zh) | 一种动态减重步行训练仪 | |
| CN210307810U (zh) | 一种柔性外骨骼助力机器人 | |
| CN113070865B (zh) | 主被动结合的舱外服下肢助力装置、测试装置及测试方法 | |
| CN104606028A (zh) | 臂式下肢运动康复训练机器人 | |
| CN214511821U (zh) | 一种绳拉式柔性下肢外骨骼助力机器人 | |
| CN111449915A (zh) | 髋膝双关节助行外骨骼 | |
| KR20190122045A (ko) | 작업자용 요추근력보조장치 | |
| CN111631921A (zh) | 一种步行跟随康复训练设备与自动跟随控制方法 | |
| CN110861074B (zh) | 一种绳驱动柔性外骨骼助力机器人 | |
| CN204468604U (zh) | 臂式下肢运动康复训练机器人 | |
| CN107486839B (zh) | 一种机械装置 | |
| CN212679569U (zh) | 髋膝双关节助行外骨骼 | |
| CN211214227U (zh) | 一种步行跟随康复训练设备 | |
| CN112894769B (zh) | 一种基于负重支撑与自重平衡的下肢外骨骼 | |
| CN215021626U (zh) | 基于绳轮组合的下肢外骨骼辅助器 | |
| CN111214363B (zh) | 一种用于下肢康复训练的可穿戴移动式机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20130410 |