JP6541552B2 - アシストスーツ - Google Patents
アシストスーツ Download PDFInfo
- Publication number
- JP6541552B2 JP6541552B2 JP2015227687A JP2015227687A JP6541552B2 JP 6541552 B2 JP6541552 B2 JP 6541552B2 JP 2015227687 A JP2015227687 A JP 2015227687A JP 2015227687 A JP2015227687 A JP 2015227687A JP 6541552 B2 JP6541552 B2 JP 6541552B2
- Authority
- JP
- Japan
- Prior art keywords
- wire
- groove
- rotating body
- outer peripheral
- peripheral surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Landscapes
- Manipulator (AREA)
Description
これにより、アシストスーツを装着した状態において、作業者が荷吊り上げ機構により荷物を保持するのであり、この状態で荷物は荷吊り上げ機構に支持される。作業者は荷吊り上げ機構のエンド・エフェクタを手で持つことにより、荷物の位置を安定させる(荷物が振ら付かないようにする)。
本体部に備えられた駆動装置によりワイヤを巻き取ることによって、荷吊り上げ機構のエンド・エフェクタ(荷物)を上昇させることができるのであり、駆動装置によりワイヤを繰り出すことによって、荷吊り上げ機構のエンド・エフェクタ(荷物)を下降させることができる。
この構造において、特に回転体にワイヤを巻き取る場合、ワイヤの最初の部分が回転体のある部分に巻き取られ、回転体がさらに回転して、ワイヤの次の部分がワイヤの最初の部分の上側に巻き取られるという状態の生じることが考えられる。このように、ワイヤが回転体の同じ部分に二重に巻き取られる状態が生じ、この状態が繰り返されると、ワイヤの破損やワイヤのもつれに発展することが考えられる。
本発明は、アシストスーツにおいて、ワイヤを巻き取り及び繰り出す回転体を備えた場合、ワイヤが回転体の同じ部分に二重に巻き取られる状態が生じないように構成することを目的としている。
本発明の第1特徴は、アシストスーツにおいて次のように構成することにある。
作業者の背中部に取り付けられる本体部と、前記本体部から作業者を越えて前方に延出されたアーム部と、
前記アーム部から下方に延出されたワイヤと、作業者が手で持つことにより荷物を保持するもので前記ワイヤに連結されたハンド部とが備えられ、
前記ワイヤを巻き取ることにより前記ハンド部を上昇させ、前記ワイヤを繰り出すことにより前記ハンド部を下降させる駆動装置と、
作業者に操作されることにより前記駆動装置を作動させる手動操作部とが備えられており、
前記駆動装置が、前記ワイヤを巻き取り及び繰り出す回転体と、前記回転体を回転軸芯周りに巻き取り側及び繰り出し側に回転駆動する電動モータとを備えており、
前記回転体の外周面における前記回転軸芯の方向での一方の部分である第1部分と、前記回転体の外周面における前記回転軸芯の方向での他方の部分である第2部分とにおいて、前記回転体の外周面を複数周に亘って螺旋状に回りながら、前記第1部分と前記第2部分とに亘って接続される連続した溝部を、前記回転体の外周面に備えて、
前記回転体が巻き取り側に回転駆動されると、前記ワイヤが前記溝部の前記第1部分側の部分から、前記溝部の前記第2部分側の部分に向って順に入るように、且つ、
前記回転体が繰り出し側に回転駆動されると、前記ワイヤが前記溝部の前記第2部分側の部分から、前記溝部の前記第1部分側の部分に向って順に出るように構成しており、
前記ワイヤを案内する固定のガイド部を備えて、
前記ガイド部を、前記回転体の外周面に対向する位置で、且つ、前記回転体の外周面における前記溝部の前記回転軸芯方向での範囲の中央部に対向する位置に配置しており、
前記ガイド部が、前記本体部に固定された受け部材に固定されている。
本発明の第1特徴によると、回転体の外周面における回転軸芯の方向での一方の部分である第1部分と、回転体の外周面における回転軸芯の方向での他方の部分である第2部分とにおいて、回転体の外周面を複数周に亘って螺旋状に回りながら、第1部分と第2部分とに亘って接続される連続した溝部を、回転体の外周面に備えている。
これにより、ワイヤの最初の部分が回転体のある部分に巻き取られて、ワイヤの次の部分がワイヤの最初の部分の隣に巻き取られる状態となるのであり、ワイヤの次の部分がワイヤの最初の部分の上側に巻き取られるという状態は生じない。
以上のように、ワイヤが回転体の同じ部分に二重に巻き取られる状態を避けることができて、ワイヤが回転体の同じ部分に二重に巻き取られる状態が繰り返されることによるワイヤの破損やワイヤのもつれを抑えることができる。
回転体の外周面に螺旋状の溝部を備えた場合、回転体の外周面において、溝部は回転軸芯方向に所定の範囲(回転体の外周面における回転軸芯の方向での一方の部分である第1部分と、回転体の外周面における回転軸芯の方向での他方の部分である第2部分とに亘る範囲)を備えている。
これにより、回転体によりワイヤを巻き取る際(繰り出す際)、ガイド部から回転体の第1部分に向く状態と、ガイド部から回転体の第2部分に向く状態とに亘って、ワイヤが向きを変えて曲がることになる。
これにより、ガイド部から回転体の第1部分に向く状態でのワイヤの曲がりと、ガイド部から回転体の第2部分に向く状態でのワイヤの曲がりとが、略同じ大きさの小さなものとなるのであり、一方の曲がりが大きく、他方の曲がりが小さいという状態を避けることができるようになって、ワイヤの耐久性を向上させることができる。
本発明の第2特徴は、本発明の第1特徴のアシストスーツにおいて次のように構成することにある。
前記回転体の外周面を外側から覆うカバーを備えている。
本発明の第2特徴によると、回転体の外周面を外側から覆うカバーを備えることによって、回転体の溝部にゴミ等が入り込むのを防止することができるのであり、回転体が巻き取り側に回転駆動される際に、ワイヤが回転体の溝部に入る状態がゴミ等により邪魔されるような状態が少なくなる。
本発明の第3特徴は、本発明の第2特徴のアシストスーツにおいて次のように構成することにある。
前記ワイヤが前記溝部に入った状態で前記カバーの内面が前記ワイヤに接触せず、且つ、前記回転体の外周面と前記カバーの内面との間隔が前記ワイヤの外径よりも小さなものとなる位置に、前記カバーを配置している。
前項[II]に記載のようなカバーを備えた場合、本発明の第3特徴によると、ワイヤが回転体の溝部に入った状態において、カバーの内面がワイヤに接触しないので、ワイヤが回転体の溝部に入った通常の状態で回転体が回転しても、カバーの内面の摩耗やワイヤの摩耗が生じることはない。
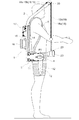
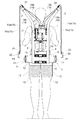
先ず、アシストスーツの全体構成及び本体部1について説明する。
図1,2,3に示すように、作業者の背中部に取り付けられる本体部1、本体部1の上部から上方に延出された右及び左のアーム部2、本体部1の下部に備えられた右及び左の脚作用部3が備えられており、作業者への装着用の取付ベルト4、右及び左の肩ベルト5が備えられて、アシストスーツが構成されている。
次に、右及び左の脚作用部3について説明する。
図1,2,3に示すように、右及び左の脚作用部3は、基部10、伝動ケース11、操作アーム12及び脚ベルト13等を備えている。横フレーム9に左右方向にスライド自在に基部10が支持されており、基部10の外端部に伝動ケース11が前向きに連結されている。
これにより、取付ベルト4の腰部への巻き付け具合により、作業者の体格に合わせるように右及び左の脚作用部3の間隔が決まるのであり、取付ベルト4により右及び左の脚作用部3の位置が決められた状態となる。
次に、右及び左のアーム部2について説明する。
図1,2,3に示すように、右及び左の縦フレーム6の上部が、作業者の右及び左の肩部を越えて斜め前方の斜め上方に延出されて、右及び左のアーム部2が構成されており、右及び左のアーム部2の上端部に、案内プーリー33が回転自在に支持されている。
前述の状態において、作業者は右手及び左手の親指により上昇及び下降操作スイッチ23,24を押し操作する。この場合、上昇及び下降操作スイッチ23,24は復帰型に構成されており、作業者が上昇及び下降操作スイッチ23,24を押し操作していると、上昇及び下降操作スイッチ23,24から信号が出力されるのであり、作業者が上昇及び下降操作スイッチ23,24の押し操作を止めると、上昇及び下降操作スイッチ23,24の信号は停止する。
例えば、床に置かれた荷物を高い棚やトラックの荷台に置くような場合、作業者がしゃがんで床の荷物を手で持ち、次に手を下に延ばした状態で荷物を持ちながら立ち上がり、次に手で荷物を持ち上げて、荷物を高い棚やトラックの荷台に置くような状態が想定される。
前述の状態において、上昇及び下降操作スイッチ23,24の押し操作に基づいて、制御装置14により右及び左の脚作用部3、駆動装置17が作動する状態について、説明する。
これにより、作業者が歩行する場合や、作業者が膝部を曲げて腰部を落とす場合(しゃがむ場合)、作業者の太腿に追従するように操作アーム12が揺動するのであり、作業者の動作が妨げられることはない。
前述のように作業者が立ち上がる際において、前述の駆動装置17のブレーキ機能により、右及び左のハンド部20(荷物)が下降することはない。
以上のようにして、荷物を高い棚やトラックの荷台等に置くと、最初の状態に戻り、次の荷物に対して同様な操作を行う。
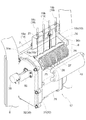
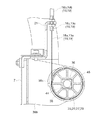
次に、駆動装置17の全体構成、駆動装置17における電動モータ29及び伝動機構30について説明する。
図4,5,6に示すように、駆動装置17は、左右方向の回転軸芯P2周りに回転自在に左右方向に配置された4個の回転体25,26,27,28と、4個の回転体25〜28の下側に左右方向に配置された電動モータ29と、電動モータ29の出力軸29a側の端部と回転体25〜28の左の端部(電動モータ29の出力軸29a側の端部)とに亘って上下方向に配置された伝動機構30とを備えている。
伝動ケース31と蓋部32の上部に、伝動軸34が回転自在に支持されており、伝動軸34が伝動ケース31と蓋部32から右及び左側に突出している。伝動軸34に第3ギヤ43が固定されており、第3ギヤ43が第2ギヤ42と咬合している。
次に、駆動装置17における回転体25〜28の支持構造について説明する。
図4,5,6に示すように、半円筒状の支持部材36(カバーに相当)が備えられている。支持部材36の左の端部(電動モータ29の出力軸29a側の端部)に、半円状のフランジ部36aが備えられて、フランジ部36aが伝動ケース31の上部に連結されている。これにより、支持部材36のフランジ部36aが、伝動ケース31(伝動機構30)を介して支持板7(本体部1)に連結された状態となっている。
電動モータ29に電磁ブレーキ(図示せず)が備えられている。電動モータ29の作動時に電磁ブレーキは解除状態となり、電動モータ29の停止時及び非通電時に電磁ブレーキは制動状態となる。
次に、駆動装置17における回転体25〜28について説明する。
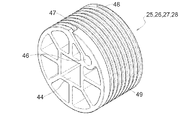
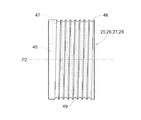
図8及び図9に示すように、回転体25〜28は合成樹脂により円柱状に構成されて、中央部に断面四角状の取付孔44が開口されている。回転体25〜28の右の横側面に、ワイヤ18,19のインナー18a,19aの取付部46が備えられており、回転体25〜28の外周面の右の部分において、取付部46につながる溝部47(回転体25〜28の外周面における回転軸芯P2の方向での一方の部分である第1部分に相当)が備えられている。
次に、駆動装置17における回転体25〜28において、ワイヤ18,19のインナー18a,19aの巻き取りの状態について説明する。
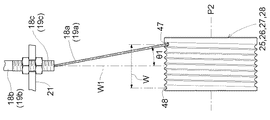
図10に示すように、ワイヤ18,19のアウター18b,19bの端部18c,19cが、回転体25〜28の外周面に対向する位置で、且つ、回転体25〜28の外周面における溝部49の回転軸芯P2方向での範囲Wの中央部に対向する位置W1に配置されている。
これにより、ワイヤ18,19のインナー18a,19aが回転体25〜28の左の部分48に達するまで、回転体25〜28が回転したことが角度センサー35により検出されると、電動モータ29が自動的に停止する。
次に、駆動装置17における回転体25〜28において、ワイヤ18,19のインナー18a,19aの繰り出しの状態について説明する。
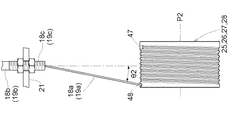
図12に示すように、ワイヤ18,19のインナー18a,19aが回転体25〜28の左の部分48に達するまで、回転体25〜28が巻き取り側に回転駆動された状態において、回転体25〜28が繰り出し側に回転駆動されると(図7の紙面時計方向)、ワイヤ18,19のインナー18a,19aが回転体25〜28の溝部49(回転体25〜28の左の部分48)から順に出ていき、ワイヤ18,19のインナー18a,19aが回転体25〜28から繰り出される(以上、回転体25〜28が繰り出し側に回転駆動されると、ワイヤ18,19(インナー18a,19a)が溝部49の第2部分(左の部分48)側の部分から、溝部49の第1部分(溝部47)側の部分に向って順に出る状態に相当)。
これにより、ワイヤ18,19のインナー18a,19aが回転体25〜28の溝部47に達するまで、回転体25〜28が回転したことが角度センサー35により検出されると、電動モータ29が自動的に停止する。
次に、駆動装置17における回転体25〜28と支持部材36及びカバー部材45との関係について説明する。
図4及び図7に示すように、支持部材36及びカバー部材45の内面は円筒状となっており、支持部材36及びカバー部材45の内面が回転体25〜28の外周面に接近した状態となっている。
これにより、ワイヤ18,19のインナー18a,19aが回転体25〜28の溝部49に入った状態で、ワイヤ18,19のインナー18a,19aが回転体25〜28の溝部49に埋没した状態となる。
これにより、図5に示すように、ワイヤ18,19のインナー18a,19aが回転体25〜28の溝部49に入った状態において、支持部材36及びカバー部材45の内面がワイヤ18,19のインナー18a,19aに接触することはない。
図8〜図12に示す回転体25〜28に対して、回転体25〜28の左の横側面に、ワイヤ18,19のインナー18a,19aの取付部46を備え、回転体25〜28の外周面の右の部分において取付部46につながる溝部47を備えるように構成してもよい。
前述の構成によると、回転体25〜28の外周面における回転軸芯P2の方向での右の部分48において、回転体25〜28の外周面を複数周に亘って螺旋状(雄ネジ状)に回りながら、回転体25〜28の溝部47と左の部分48とに亘って接続される連続した1本の溝部49が、回転体25〜28の外周部に備えられる。
4個の回転体25〜28を備える場合、例えば以下の(1)〜(6)に示すような各種の組み合わせが考えられる。
(1)回転体25,26を前述の[発明を実施するための形態]に示すように構成し、回転体27,28を前述の[発明の実施の第1別形態]に示すように構成する。
(2)回転体25,26を前述の[発明の実施の第1別形態]に示すように構成し、回転体27,28を前述の[発明を実施するための形態]に示すように構成する。
(4)回転体25,27を前述の[発明の実施の第1別形態]に示すように構成し、回転体26,28を前述の[発明を実施するための形態]に示すように構成する。
(6)回転体25,28を前述の[発明の実施の第1別形態]に示すように構成し、回転体26,27を前述の[発明を実施するための形態]に示すように構成する。
図1,2,3に示す右のハンド部20に対して、1本のワイヤ18及び1個の回転体25を備え、左のハンド部20に対して、1本のワイヤ18及び1個の回転体28を備えるように構成してもよい。
このように構成した場合、回転体25,28を、前述の[発明を実施するための形態]又は[発明の実施の第1別形態]に示すように構成すればよく、前述の[発明の実施の第2別形態]に記載のように、各種の組み合わせが考えられる。
図5に示す構造に対して、以下に示すように構成してもよい。
図13に示すように、ワイヤ18,19のインナー18a,19aの外径D1に対して回転体25〜28の溝部49の深さを、ワイヤ18,19のインナー18a,19aの外径D1の約1/2に設定する。
回転体25〜28の外周面と支持部材36及びカバー部材45の内面との間隔W2を、ワイヤ18,19のインナー18a,19aの外径D1よりも小さく、且つワイヤ18,19のインナー18a,19aの外径D1の1/2よりも大きなものに設定する。
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第4別形態]において、右及び左のアーム部2を廃止して、1本のアーム部2を備えてもよい。
前述のように構成した場合、1本のアーム部2から2本のワイヤ18を延出して、2本のワイヤ18の一方に右のハンド部20を備え、2本のワイヤ18の他方に左のハンド部20を備える。
又は、1本のアーム部2から1本のワイヤ18を延出し、1本のワイヤ18の端部を二股状に分岐させて、分岐部分の一方に右のハンド部20を備え、分岐部分の他方に左のハンド部20を備える。
前述の[発明を実施するための形態][発明の実施の第1別形態]〜[発明の実施の第5別形態]において、右及び左の脚作用部3を備えないように構成してもよい。バッテリー16を、支持板15ではなく横フレーム9の後面に連結するように構成してもよい。
2 アーム部
17 駆動装置
18,19 ワイヤ
18c、19c ガイド部
20 ハンド部
23,24 手動操作部
25,26,27,28 回転体
29 電動モータ
36,45 カバー
47 第1部分
48 第2部分
49 溝部
D1 ワイヤの外径
P2 回転軸芯
W 回転体の外周面における溝部の回転軸芯方向での範囲
W1 範囲Wの中央部に対向する位置
W2 回転体の外周面とカバーの内面との間隔
Claims (3)
- 作業者の背中部に取り付けられる本体部と、前記本体部から作業者を越えて前方に延出されたアーム部と、
前記アーム部から下方に延出されたワイヤと、作業者が手で持つことにより荷物を保持するもので前記ワイヤに連結されたハンド部とが備えられ、
前記ワイヤを巻き取ることにより前記ハンド部を上昇させ、前記ワイヤを繰り出すことにより前記ハンド部を下降させる駆動装置と、
作業者により操作されることにより前記駆動装置を作動させる手動操作部とが備えられており、
前記駆動装置が、前記ワイヤを巻き取り及び繰り出す回転体と、前記回転体を回転軸芯周りに巻き取り側及び繰り出し側に回転駆動する電動モータとを備えており、
前記回転体の外周面における前記回転軸芯の方向での一方の部分である第1部分と、前記回転体の外周面における前記回転軸芯の方向での他方の部分である第2部分とにおいて、前記回転体の外周面を複数周に亘って螺旋状に回りながら、前記第1部分と前記第2部分とに亘って接続される連続した溝部を、前記回転体の外周面に備えて、
前記回転体が巻き取り側に回転駆動されると、前記ワイヤが前記溝部の前記第1部分側の部分から、前記溝部の前記第2部分側の部分に向って順に入るように、且つ、
前記回転体が繰り出し側に回転駆動されると、前記ワイヤが前記溝部の前記第2部分側の部分から、前記溝部の前記第1部分側の部分に向って順に出るように構成しており、
前記ワイヤを案内する固定のガイド部を備えて、
前記ガイド部を、前記回転体の外周面に対向する位置で、且つ、前記回転体の外周面における前記溝部の前記回転軸芯方向での範囲の中央部に対向する位置に配置しており、
前記ガイド部が、前記本体部に固定された受け部材に固定されているアシストスーツ。 - 前記回転体の外周面を外側から覆うカバーを備えている請求項1に記載のアシストスーツ。
- 前記ワイヤが前記溝部に入った状態で前記カバーの内面が前記ワイヤに接触せず、且つ、前記回転体の外周面と前記カバーの内面との間隔が前記ワイヤの外径よりも小さなものとなる位置に、前記カバーを配置している請求項2に記載のアシストスーツ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015227687A JP6541552B2 (ja) | 2015-11-20 | 2015-11-20 | アシストスーツ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015227687A JP6541552B2 (ja) | 2015-11-20 | 2015-11-20 | アシストスーツ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017094421A JP2017094421A (ja) | 2017-06-01 |
| JP6541552B2 true JP6541552B2 (ja) | 2019-07-10 |
Family
ID=58803324
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015227687A Active JP6541552B2 (ja) | 2015-11-20 | 2015-11-20 | アシストスーツ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6541552B2 (ja) |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS476923Y1 (ja) * | 1968-01-12 | 1972-03-13 | ||
| JP3062470U (ja) * | 1999-03-25 | 1999-10-08 | 日本ホイスト株式会社 | 電気ホイスト用ワイヤドラム |
| JP5424916B2 (ja) * | 2010-01-29 | 2014-02-26 | 三菱電機Fa産業機器株式会社 | ロープホイスト |
| CN102811938B (zh) * | 2010-04-09 | 2016-10-12 | 艾克索仿生技术公司 | 外骨骼负载处理系统及其使用方法 |
| WO2011127471A1 (en) * | 2010-04-09 | 2011-10-13 | Lockheed Martin Corporation | Portable load lifting system |
| JP5909063B2 (ja) * | 2011-09-06 | 2016-04-26 | 国立大学法人 和歌山大学 | パワーアシストロボット装置 |
| JP6289955B2 (ja) * | 2014-03-20 | 2018-03-07 | 株式会社クボタ | アシストスーツ |
-
2015
- 2015-11-20 JP JP2015227687A patent/JP6541552B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017094421A (ja) | 2017-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108430714B (zh) | 辅助器具 | |
| EP3246285A1 (en) | Assistive suit | |
| JP6660827B2 (ja) | アシスト器具 | |
| CN109937123A (zh) | 辅助设备 | |
| JP6541552B2 (ja) | アシストスーツ | |
| JP6541553B2 (ja) | アシストスーツ | |
| JP6624940B2 (ja) | アシスト器具 | |
| JP6581962B2 (ja) | アシスト器具 | |
| JP6775473B2 (ja) | アシスト器具 | |
| EP3647255B1 (en) | Assist device with hand portions for holding baggage | |
| JP6581961B2 (ja) | アシスト器具 | |
| JP6837424B2 (ja) | 荷物保持用のハンド部 | |
| JP6671179B2 (ja) | アシスト器具 | |
| JP6671180B2 (ja) | アシスト器具 | |
| JP6833633B2 (ja) | アシスト器具 | |
| JP6833665B2 (ja) | アシスト器具 | |
| JP6731888B2 (ja) | アシスト器具 | |
| JP6879843B2 (ja) | アシスト器具 | |
| JP6854732B2 (ja) | 荷物保持用のハンド部 | |
| JP2020093356A (ja) | アシスト器具 | |
| JP6624941B2 (ja) | アシスト器具 | |
| JP6783171B2 (ja) | アシスト器具 | |
| JP6833663B2 (ja) | アシスト器具又は荷物保持用のハンド部 | |
| JP7361664B2 (ja) | アシスト器具 | |
| JP2019026472A (ja) | 荷物保持用のハンド部 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171222 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181221 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190514 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190611 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6541552 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |