CN101630107B - 图像稳定控制设备和照相机 - Google Patents
图像稳定控制设备和照相机 Download PDFInfo
- Publication number
- CN101630107B CN101630107B CN2009101519749A CN200910151974A CN101630107B CN 101630107 B CN101630107 B CN 101630107B CN 2009101519749 A CN2009101519749 A CN 2009101519749A CN 200910151974 A CN200910151974 A CN 200910151974A CN 101630107 B CN101630107 B CN 101630107B
- Authority
- CN
- China
- Prior art keywords
- vibration
- unit
- output
- gyration
- radius
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



























































Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Adjustment Of Camera Lenses (AREA)
- Studio Devices (AREA)
Abstract
本发明提供一种图像稳定控制设备和摄像设备。该图像稳定控制设备包括:振动校正单元,用于校正由于振动而发生的图像抖动;第一振动检测单元,用于检测并输出振动的角速度;第二振动检测单元,用于检测并输出振动的加速度;第一提取器,用于基于第一振动检测单元的输出,提取预定频带中的信号;第二提取器,用于基于第二振动检测单元的输出,提取预定频带中的信号;输出校正单元,用于基于由第一和第二提取器提取的信号,校正第一振动检测单元的输出;以及驱动单元,用于基于校正后的第一振动检测单元的输出,驱动振动校正单元。
Description
技术领域
本发明涉及一种用于校正或防止由于手抖动等振动而发生的图像抖动或图像劣化的图像稳定控制设备和摄像设备。
背景技术
近年来,能够自动进行照相机的用于确定曝光的操作和调焦操作等对于拍摄来说重要的所有操作。因此,即使不熟悉照相机使用的用户也可以很少拍摄失败。
另外,近年来市售的照相机包括图像稳定控制设备,该图像稳定控制设备包括振动校正单元、驱动单元和振动检测单元,并且用于防止由于振动而发生的图像抖动。通过使用这一类新照相机,拍摄者可以极少拍摄失败。
下面简要说明用于防止图像抖动的图像稳定控制设备。拍摄期间照相机上可能发生的手抖动通常为1~10Hz频率的振动。为了即使在按下快门释放按钮时向照相机施加这类振动的时候也能没有任何图像抖动地进行拍摄,需要检测施加于照相机的振动,并且根据检测值移位用于校正图像抖动的透镜(以下简称为“校正透镜”)。
因此,为了即使在照相机振动时也能没有任何图像抖动地拍摄图像,需要精确地检测照相机的振动水平,并且校正由于振动而发生的光轴变化。原理上,通过使用设置在照相机上的振动检测单元可以计算出(照相机的)振动。更具体地,这类振动检测单元检测加速度、角加速度、角速度和角位移,并且对其输出执行运算来校正图像抖动。
在一般拍摄条件下,根据照相机的姿势可能发生的角振动(转动振动)是可能的振动的主要原因。因此,传统照相机包括仅用于检测振动的角速度测量仪。在这类照相机中,想要通过利用驱动单元驱动振动校正单元(即校正透镜)来抑制图像抖动,其中,该振动校正单元根据来自振动检测单元的信号移位光轴。
同时,当在近距离处拍摄图像时(在使用高摄像倍率的拍摄条件下),除由于照相机的姿势而可能发生的角振动以外,还可能发生由于平行振动而导致的显著图像劣化,其中,平行振动也可能引起轻微的图像劣化。在如微距拍摄的情况一样以约20cm这样的近被摄体距离来拍摄被摄体图像的拍摄条件下,或者,如果即使当确保1米的充足被摄体距离时,摄像光学系统的焦距仍非常大(例如,400mm),则需要积极检测平行振动并驱动振动校正单元。
在这点上,在日本特开平07-225405号公报所讨论的方法中,设置用于检测加速度的加速度测量仪(加速度传感器),以检测平行振动,并且根据所检测到的平行振动值和来自分开设置的角速度测量仪的输出来驱动振动校正单元。
此外,日本特开2002-359769号公报所讨论的方法在改变振动校正量的同时校正图像抖动。在该方法中,在校正图像抖动的同时,照相机的图像传感器获取所拍摄图像的运动信息。该方法通过根据来自图像传感器的输出评价用于校正图像抖动的精度,设置最佳振动校正量。
然而,在这点上,在日本特开平07-225405号公报所讨论的方法中,来自用于检测平行振动的加速度测量仪的输出信号可能由于干扰噪声或温度改变等环境变化而发生改变。因此,难以利用该方法高精度地校正平行振动。
此外,在日本特开2002-359769号公报所讨论的方法中,在 设置最佳振动特性之前,需要很长时间。因此,可能降低照相机的用户可操作性。另外,可能需要振动校正单元的大尺寸机构,以使用可变振动校正量来实现振动校正。
发明内容
本发明涉及一种小型化的图像稳定控制设备和其稳定控制方法,其中,该图像稳定控制设备具有高可操作性并用于高精度地校正由于平行振动而发生的图像抖动。
根据本发明的一个方面,提供一种图像稳定控制设备,包括:振动校正单元,用于校正由于施加到所述图像稳定控制设备的振动而发生的图像抖动;第一振动检测单元,用于检测并输出所述振动的角速度;第二振动检测单元,用于检测并输出所述振动的加速度;第一提取器,用于基于所述第一振动检测单元的输出,提取预定频带中的信号,所述第一提取器用于提取频带比由于照相机抖动而发生的振动的频带窄的信号;第二提取器,用于基于所述第二振动检测单元的输出,提取预定频带中的信号,所述第二提取器用于提取频带比由于照相机抖动而发生的振动的频带窄的信号;输出校正单元,用于基于由所述第一提取器提取的信号和由所述第二提取器提取的信号,校正所述第一振动检测单元的输出;以及驱动单元,用于基于由所述输出校正单元校正后的所述第一振动检测单元的输出,驱动所述振动校正单元。
根据本发明的另一方面,提供一种摄像设备,包括上述图像稳定控制设备。
根据本发明的另一方面,提供一种包括摄像单元的摄像设备,所述摄像设备包括:振动校正单元,用于校正由于施加到所述摄像设备的振动而发生的图像抖动;第一振动检测单元, 用于检测并输出所述振动的角速度;第二振动检测单元,用于基于所述摄像单元的输出,检测并输出所述振动的位移;第一提取器,用于基于所述第一振动检测单元的输出,提取预定频带中的信号,所述第一提取器用于提取频带比由于照相机抖动而发生的振动的频带窄的信号;第二提取器,用于基于所述第二振动检测单元的输出,提取预定频带中的信号,所述第二提取器用于提取频带比由于照相机抖动而发生的振动的频带窄的信号;输出校正单元,用于基于由所述第一提取器提取的信号和由所述第二提取器提取的信号,校正所述第一振动检测单元的输出;以及驱动单元,用于基于由所述输出校正单元校正后的所述第一振动检测单元的输出,驱动所述振动校正单元。
通过以下参考附图对典型实施例的详细说明,本发明的其它特征和方面将显而易见。
附图说明
包含在说明书中并构成说明书的一部分的附图,示出本发明的典型实施例、特征和方面,并且与说明书一起用来解释本发明的原理。
图1是示出根据本发明第一典型实施例的单镜头反光照相机的例子的平面图;
图2是示出根据本发明第一典型实施例的单镜头反光照相机的例子的侧视图;
图3示出包括在根据本发明第一典型实施例的单镜头反光照相机中的图像稳定控制设备的例子;
图4示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图5示出根据本发明第一典型实施例的图像稳定控制设备 的示例性频率特性;
图6示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图7示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图8示出根据本发明第一典型实施例的图像稳定控制设备中的示例性波形;
图9示出根据本发明第一典型实施例的图像稳定控制设备中的示例性波形;
图10示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图11示出根据本发明第一典型实施例的照相机的示例性振动;
图12示出根据本发明第一典型实施例的加速度测量仪的例子;
图13示出根据本发明第一典型实施例的加速度测量仪的示例性频率特性;
图14示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图15示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图16示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图17示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图18示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图19示出根据本发明第一典型实施例的图像稳定控制设备的另一示例性结构;
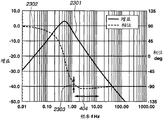
图20示出根据本发明第一典型实施例的图像稳定控制设备的转动半径的示例性频率特性;
图21示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图22示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图23示出根据本发明第一典型实施例的图像稳定控制设备的示例性频率特性;
图24示出根据本发明第一典型实施例的图像稳定控制设备的另一示例性结构;
图25是示出根据本发明第一典型实施例的图像稳定控制设备的另一示例性结构的框图;
图26示出根据本发明第一典型实施例的图像稳定控制设备的又一示例性结构;
图27示出根据本发明第一典型实施例的图像稳定控制设备中的示例性波形;
图28示出根据本发明第一典型实施例的图像稳定控制设备中的示例性波形;
图29示出根据本发明第一典型实施例的图像稳定控制设备中的示例性波形;
图30是示出根据本发明第一典型实施例的图像稳定控制设备的示例性操作的时序图;
图31示出根据本发明第一典型实施例的照相机的示例性振动;
图32是示出根据本发明第一典型实施例的图像稳定控制 设备的主要组件的示例性操作的流程图;
图33示出根据本发明第一典型实施例驱动振动校正单元的信号处理系统的例子;
图34示出根据本发明第一典型实施例驱动振动校正单元的示例性波形;
图35示出根据本发明第一典型实施例来自加速度测量仪的输出的示例性波形;
图36示出根据本发明第一典型实施例的照相机的示例性振动;
图37示出根据本发明第一典型实施例的照相机的示例性振动;
图38示出根据本发明第一典型实施例的输出校正单元的示例性内部结构;
图39示出根据本发明第二典型实施例的图像稳定控制设备的示例性结构;
图40是示出根据本发明第二典型实施例的图像稳定控制设备的转动半径的移动平均的时序图;
图41示出根据本发明第二典型实施例的图像稳定控制设备的另一示例性结构;
图42示出根据本发明第二典型实施例的加速度的输出的示例性波形;
图43是示出根据本发明第二典型实施例控制加速度测量仪的示例性处理的流程图;
图44是示出根据本发明第二典型实施例的图像稳定控制设备的示例性操作的流程图;
图45是示出根据本发明第二典型实施例的图像稳定控制设备的操作的例子的时序图;
图46示出根据本发明第二典型实施例的照相机的振动的例子;
图47示出根据本发明第二典型实施例的照相机的振动的例子;
图48示出根据本发明第三典型实施例的图像稳定控制设备的示例性结构;
图49示出根据本发明第三典型实施例的加速度的输出的示例性波形;
图50示出根据本发明第三典型实施例的图像稳定控制设备所使用的振动的示例性波形;
图51示出根据本发明第三典型实施例的图像稳定控制设备的振动的示例性波形;
图52示出根据本发明第三典型实施例的图像稳定控制设备的振动的示例性波形;
图53示出根据本发明第三典型实施例的图像稳定控制设备的另一示例性结构;
图54示出根据本发明第四典型实施例的图像稳定控制设备的示例性结构;
图55示出根据本发明第四典型实施例来自加速度测量仪的输出的示例性波形;
图56示出根据本发明第五典型实施例的图像稳定控制设备的示例性结构;
图57示出根据本发明第六典型实施例的图像稳定控制设备的示例性结构;
图58A~58H均示出根据本发明第六典型实施例的照相机的姿势;
图59示出根据本发明第七典型实施例的图像稳定控制设 备的示例性结构;
图60是示出根据本发明第八典型实施例的图像稳定控制设备的示例性结构的框图;
图61示出根据本发明第九典型实施例的照相机和图像稳定控制设备的示例性结构;
图62A和62B均示出根据本发明第九典型实施例的振动校正单元的示例性结构;
图63是示出根据本发明第九典型实施例的图像稳定控制设备的示例性操作的流程图;
图64示出根据本发明第十典型实施例的照相机和图像稳定控制设备的示例性结构;
图65示出根据本发明第十典型实施例的运动矢量的例子;
图66示出根据本发明第十典型实施例的图像稳定控制设备的振动的示例性波形;
图67示出根据本发明第十典型实施例的照相机和图像稳定控制设备的另一示例性结构。
具体实施方式
下面参考附图详细说明本发明的各种典型实施例、特征和方面。这些实施例中所述组件的相对配置、数字表达式和数值不是旨在限制本发明的范围。
下面说明本发明的第一典型实施例。图1和2是示出根据本典型实施例具有图像稳定控制设备的单镜头反光照相机的例子的平面图和侧视图。
参考图1,将具有振动校正单元的可更换拍摄镜头6801安装在照相机机体6804上。下面详细说明振动校正单元。简要地说,振动校正单元执行对光轴6802的垂直或水平方向上发生的 振动等图像抖动的校正。以下将光轴的垂直或水平方向上发生的振动统一简称为“角振动”。利用图1和2中的箭头6803p和6803y表示角振动。
在本典型实施例中,向表示照相机在照相机机体6804的垂直方向上(在图1和2中以箭头6806p和101pb表示的俯仰(pitch)方向上)可能发生的振动的附图标记添加附图标记“p”。另一方面,向表示照相机在照相机机体6804的水平方向上(在图1和2中以箭头6806y和101yb表示的偏转(yaw)方向上)可能发生的振动的附图标记添加附图标记“y”。
另外,照相机机体6804包括释放按钮6804a、模式拨盘6804b(包括主开关)、可伸缩闪光单元6804c、照相机中央处理单元(CPU)6804d和图像传感器6805。此外,振动校正单元6806包括校正透镜6806a、线圈和永久磁铁。驱动单元向线圈提供电流。下面详细说明驱动单元。前透镜6810与校正透镜6806a和其它透镜(没有附图标记)一起构成拍摄光学系统。校正透镜6806a可以通过线圈和永久磁铁的作用,在箭头6806p和6806y所表示的方向上自由移动。因此,可以校正在箭头6803p和6803y所表示的方向上发生的图像抖动。
角速度测量仪(以下称之为“陀螺仪”)6807p和6807y各自检测发生在围绕箭头6803p和6803y的部分处的振动。陀螺仪6807p和6807y具有以箭头6807pa和6807ya所表示的检测灵敏度方向。通过镜头CPU 6808计算由陀螺仪6807p和6807y所检测到的角速度的输出。镜头CPU 6808将输入的角速度输出转换成振动校正单元6806(即校正透镜6806a)的驱动目标值。
当用户半按下设置在照相机机体6804上的释放按钮6804a时(当用户按下开关S1以执行测光操作和调焦等拍摄准备操作时),将驱动目标值输入至驱动单元(驱动器)6809。此外,驱动 单元6809驱动振动校正单元6806的线圈。因此,如上所述,通过线圈和永久磁铁的作用,可以在与光轴垂直的平面上用于校正图像抖动的方向上(在图1和2中的箭头6806p和6806y所表示的方向上),移动校正透镜6806a。因此,开始箭头6803p和6803y的方向上的图像抖动的校正。
图像稳定控制设备包括振动校正单元6806、陀螺仪6807p和6807y、镜头CPU 6808以及驱动单元6809。
传统图像稳定控制设备使用陀螺仪6807p和6807y来检测手抖动等的振动。然而,除围绕箭头6803p和6803y发生的角振动以外,还对照相机机体6804施加平移振动(以下简称为“平行振动”),如箭头101pb和101yb所示。因此,镜头的主点处的平移运动可能成为图像抖动的原因之一。
在一般拍摄条件下,主要发生围绕箭头6803p和6803y所表示的部分而发生的角振动(转动振动),然而,由于箭头101pb和101yb所表示的平行振动而仅可能发生低水平的图像劣化。因此,在这种情况下,仅陀螺仪6807p和6807y就足以检测振动。
另一方面,除陀螺仪6807p和6807y以外,本典型实施例还包括用于检测加速度的加速度测量仪(加速度传感器)(以下称为“ACC”)101p和101y,作为用于检测施加于照相机的平行振动的振动检测单元(图像稳定控制设备),在图1和2中以箭头101pb和101yb表示该平行振动。
箭头101pa和101ya分别表示ACC 101p和101y的加速度检测中心。将来自陀螺仪6807p和6807y及ACC 101p和101y的输出输入至镜头CPU 6808。驱动单元6809根据该输出驱动振动校正单元6807。
图3是示出根据本典型实施例的图像稳定控制设备的例子的框图。在图3所示的例子中,仅说明俯仰方向上的示例性结构, 但是在照相机的偏转方向上设置类似结构。这两个结构相互基本相同。因此,在下面的说明中,说明俯仰方向上的结构。
下面参考图3详细说明角振动的校正。将来自陀螺仪6807p的角速度的信号输入至镜头CPU 6808。然后,将角速度信号输入至高通滤波(HPF)积分滤波器301。HPF积分滤波器301滤除直流(DC)分量,并且对角速度信号执行积分,以将角速度信号转换成角信号。可以通过在镜头CPU 6808内执行算术运算来实现HPF处理和积分。对于HPF处理和积分可以使用差分方程。可选地,如果在将信号输入至镜头CPU 6808之前,利用电容器或电阻器通过模拟电路来实现HPF处理和积分,这也是有用的。
在本典型实施例中,振动的频带范围为1~10Hz。因此,HPF积分滤波器301具有用于滤除充分不同于振动频带的0.1Hz以下的频率分量的一阶HPF特性。以下将HPF积分滤波器301的该HPF特性简称为“0.1Hz转折频率一阶HPF处理”。
图4和5是各自示出包括“0.1Hz转折频率一阶HPF处理”的HPF特性的伯德图(Bode diagram)。在图4和5中,在水平轴上示出频率,而在垂直轴上示出增益和相位。箭头404表示振动频带。对于增益,以分贝(db)为单位表示HPF积分滤波器301的输出与陀螺仪6807p的输出的比。
在图4所示的“1Hz转折频率一阶HPF处理”中,滤除1Hz以下的增益401的频率。然而,增益在振动下限频率1Hz下衰减了6db。此外,在1Hz下,如箭头403所示,相位402超前了45度。更具体地,不能高精度地检测到1Hz的振动。因此,在这种情况下,不能最佳地校正图像抖动。
另一方面,在图5所示的“0.1Hz转折频率一阶HPF处理”的情况下,增益501在振动下限频率1Hz下轻微衰减,而在1Hz下,如箭头503所示,相位502超前了小到5度的角。因此,在这 种情况下,对于1Hz的振动,可以高精度地校正图像抖动。
这同样适用于积分。更具体地,在本典型实施例中,振动频带范围为1~10Hz。因此,HPF积分滤波器301具有用于对充分不同于振动频带的0.1Hz以上的频率分量进行一阶积分的积分特性。以下将HPF积分滤波器301的该积分特性简称为“0.1Hz转折频率一阶积分处理”。
图6和7是各自示出包括“0.1Hz转折频率一阶积分处理”的积分特性的伯德图。在图6和7中,在水平轴上示出频率,而在垂直轴上示出增益和相位。箭头404表示振动频带。对于增益,以分贝(db)为单位表示HPF积分滤波器301的输出与陀螺仪6807p的输出的比。
在本典型实施例中,通过执行图6所示的“1Hz转折频率一阶积分处理”,获得增益601与1Hz以上的频率范围内的频率成比例衰减的一阶积分特性。然而,增益在振动下限频率1Hz下衰减了6db。
此外,在1Hz下,如箭头603所示,相位602超前了45度。更具体地,不能高精度地检测到1Hz的振动。因此,在这种情况下,不能充分地校正图像抖动。
下面更具体地说明在1Hz下衰减6db的原因。在0.01Hz或0.1Hz等不进行积分的频率下,增益为-16db。如果从1Hz下的增益开始积分,则在1Hz下,增益的衰减量应为16db。然而,在1Hz下,增益实际为-22db。也就是说,在1Hz下,增益额外衰减了6db。
另一方面,在图7所示的“0.1Hz转折频率一阶积分处理”中,增益701在振动下限频率1Hz下少量衰减。如箭头703所示,相位702在1Hz下仅超前了5度。因此,在这种情况下,对于1Hz的振动,可以高精度地校正图像抖动。
下面参考实际振动、陀螺仪6807p检测到的振动和未校正的振动的波形,详细说明上述振动校正处理。
图8示出振动的波形及执行“1Hz转折频率一阶HPF处理”和“1Hz转折频率一阶积分处理”的结果。在图8所示的例子中,在水平轴上示出时间。在图的垂直轴上从上到下分别示出实际振动角度、陀螺仪6807p检测到的振动的角速度、HPF处理后的振动的角速度、通过积分HPF处理后的角速度输出而计算出的积分角度、以及作为实际振动角度和积分角度之间的差的未校正的振动。
参考图8,波形801表示作为实际振动的下限频率的1Hz下的振动角度。波形802表示在输入振动时由陀螺仪6807p检测到的角速度。在陀螺仪6807p的实际输出中,叠加包括DC偏压分量和长期漂移分量(long-term drift component)。因此,当通过执行“1Hz转折频率一阶HPF处理”来衰减上述噪声分量时,获得波形803。
波形803的振幅衰减至波形802的振幅的一半,并且波形803的相位超前45度。由于作为振动下限频率的1Hz下的波形经过了“1Hz转折频率一阶HPF处理”,因而发生该现象。
当上述波形803经过“1Hz转折频率一阶积分处理”时,获得波形804。由于与上述原因相似的原因,振幅衰减至波形803的振幅的一半,并且相位移位。与实际振动角度波形801相比,振幅已大大衰减,并且相位超前了90度。
更具体地,由于通过一阶HPF使相位超前了45度,并且通过一阶积分进一步使相位超前了45度,从而相位总共超前了90度,因而如上所述,相位超前了90度。
波形805是指通过运算实际振动角度波形801计算出的、作为实际振动和积分角度之间的差的未校正的振动。波形805的振 幅与实际振动角度波形801的振幅没有大的不同。因此,可以以少量来校正该频率下的图像抖动。
图9示出在执行“0.1Hz转折频率一阶HPF处理”和“0.1Hz转折频率一阶积分处理”时所获得的示例性波形。
同样,在图9所示的例子中,在水平轴上示出时间。在图的垂直轴上从上到下分别示出实际振动角度、陀螺仪6807p检测到的振动的角速度、HPF处理后的振动的角速度、通过积分HPF处理后的角速度输出而计算出的积分角度、以及作为实际振动角度和积分角度之间的差的未校正的振动。
参考图9,波形901表示作为实际振动的下限频率的1Hz下的振动角度。波形902表示当输入振动时由陀螺仪6807p检测到的角速度。在陀螺仪6807p的实际输出中,叠加包括DC偏压分量和长期漂移分量。因此,当通过执行“0.1Hz转折频率一阶HPF处理”来衰减上述噪声分量时,获得波形903。
波形903的振幅与波形902的振幅没有大的不同。相位从波形902的相位仅超前了5度。这是因为,如上所述,通过执行频率充分低于振动下限频率1Hz的“0.1Hz转折频率一阶HPF处理”已经处理了角速度信号。
当上述波形903经过“0.1Hz转折频率一阶积分处理”时,获得波形904。由于与上述原因相似的原因,波形904的振幅仅少量衰减。此外,与实际振动角度波形901相比,波形904的相位仅超前了10度。由于通过执行一阶HPF处理相位超前5度,并且在执行积分时相位进一步超前5度,因而相位总共超前了10度。
波形905是指通过运算实际振动角度波形901计算出的、作为实际振动和积分角度之间的差的未校正的振动。波形905的振幅约衰减成实际振动角度波形901的振幅的四分之一。因此,通过在充分低于振动下限频率的频率范围内执行HPF处理和积 分,可以有效地校正图像抖动。
返回图3,将来自HPF积分滤波器301的输出(角度信号θ)输入至灵敏度调整单元303。灵敏度调整单元303根据从调焦编码器或变焦编码器输入至镜头CPU 6808的变焦和调焦信息302、以及可以根据变焦和调焦信息302计算出的摄像倍率,放大来自HPF积分滤波器301的输出。此外,灵敏度调整单元303将放大后的来自HPF积分滤波器301的输出设置为角振动校正目标值。
如上所述使用放大后的来自HPF积分滤波器301的输出作为角振动校正目标值,以相对振动校正单元6806的振动校正冲程(stroke)来校正在照相机的图像面上变化的振动校正灵敏度,其中,振动校正单元6806的振动校正冲程由于镜头的调焦状态或变焦状态等光学状态的变化而改变。
镜头CPU 6808将计算出的角振动校正目标值输出至驱动单元6809,以驱动振动校正单元6806。从而校正图像抖动。本典型实施例以上述方式校正角振动。
在本典型实施例中,通过使用将平行振动校正目标值(下面说明)与角振动校正目标值相加所计算出的值,来驱动振动校正单元6806。
图10示出整个振动校正处理的频率特性的例子。在图10所示的例子中,在水平轴上示出时间。在垂直轴上示出增益1001和其相位1002,其中,增益1001以db为单位表示振动校正单元6806的校正动作与振动角度的比。
在图6和7所示的例子中,将振动角速度与其积分值进行比较,并且描述积分值的频率特性。因此,在图6和7所示的例子中,增益601或701与频率成比例衰减,并且在振动频带404内,相位602或702延迟90度。
另一方面,在图10所示的例子中,将振动角度与角振动校 正目标值进行比较,并且描述角振动校正目标值(通过运算由陀螺仪6807p检测到的振动而获得的振动角度)的频率特性。在图10所示的例子中,描述角度的比较结果。因此,在振动频带中,增益变得大体恒定,并且相位大体为“0”。
在图10所示的例子中,由于上述“0.1Hz转折频率一阶HPF处理”和“0.1Hz转折频率一阶积分处理”而导致增益在波形1001的低频区域(低于0.1Hz的频率范围)中衰减。
如上所述,在图10所示的例子中,比较对象不同于图6和7中的比较对象(例如,在图6和7所示的例子中,相互比较振动角速度和其积分值,而在图10所示的例子中,相互比较角度)。因此,图10所示的积分处理的波形变得与HPF处理的波形相似,其中通过HPF处理,0.1Hz以下的频率衰减。
在图10所示的例子中,由于振动校正单元6806的机械响应特性而导致波形1001的高频区域(100Hz以上的频带)衰减。
如上所述,通过执行HPF处理、积分处理和机械响应,设置振动校正带。因此,校正以箭头404表示的振动带中的图像抖动。
如上所述,当机械响应特性高时(即如果振动校正单元对10Hz以上的频带没有响应),以及当积分处理中的转折频率接近振动频带时,不能高精度地校正图像抖动。在这点上,在本典型实施例中,根据振动带以高精度执行并设置HPF处理、积分运算和机械响应特性。
返回图3,下面详细说明用于校正平行振动的结构。
将陀螺仪6807p的输出输入至镜头CPU 6808。此外,然后将该输出输入至HPF积分滤波器310。然后,HPF积分滤波器310滤除该输出中的DC分量。此外,HPF积分滤波器310对该输出执行积分,以将角速度输出ω转换成角度输出θ。
由于下面要详细说明的原因,HPF积分滤波器310的积分转折频率不同于HPF积分滤波器301的积分转折频率。
将HPF积分滤波器310的输出输入至增益调整滤波器(以下称为“增益调整单元”)311。下面详细说明增益调整单元311的操作和作用。
通过下面要详细说明的输出校正单元309来校正增益调整单元311的输出。此外,使用增益调整单元311的输出作为平行振动校正目标值,并且将该输出与上述角振动校正目标值相加。
此外,与上述处理同时地将陀螺仪6807p的输出输入至HPF相位调整滤波器(以下简称为“HPF相位调整单元”)304。HPF相位调整单元304滤除与陀螺仪6807p的输出重叠的DC分量。另外,HPF相位调整单元304调整该信号的相位。下面详细说明HPF转折频率和相位调整。
通过陀螺仪带通滤波器(BPF)单元(带通单元)306对HPF相位调整单元304的输出进行滤除以提取预定带中的频率分量。
将ACC 101p的输出输入至HPF积分滤波器305。HPF积分滤波器305滤除叠加在ACC 101p上的DC分量。此外,HPF积分滤波器305对ACC 101p的输出执行一阶积分,以将该输出转换成速度V。下面详细说明HPF转折频率和积分转折频率。
将HPF积分滤波器305的输出输入至ACC BPF单元(带通滤波器)307。ACC BPF单元307仅提取预定带的频率分量。比较单元308比较陀螺仪BPF单元306和ACC BPF单元307的输出,以计算用于校正增益调整单元311的输出的校正值。
还将变焦和调焦信息302输入至输出校正单元309。输出校正单元309基于变焦和调焦信息302计算摄像倍率。此外,输出校正单元309通过使用计算出的摄像倍率和上述校正值,校正增益调整单元311的输出。另外,输出校正单元309将校正后的输 出设置为平行振动校正目标值。
将计算出的平行振动校正目标值与上述角振动校正目标值相加。然后,将与平行振动校正目标值相加后的角振动校正目标值输出至驱动单元6809。以上述方式,通过驱动单元6809驱动振动校正单元6806,并且校正这两种图像抖动,即角振动和平行振动。
对于上述结构,下面首先说明从比较单元308输出的校正值。
图11示出施加至照相机的角振动6803p和平行振动101pb。参考图11,拍摄镜头6801的摄像光学系统的主点处的平行振动(Y)101pb和角振动(θ)6803p以及围绕转动中心(O)1102p的转动半径(L)1101p可满足下面的表达式(1)和(2):
Y=Lθ (1)
V=Lω (2)
其中,转动半径L 1101p表示转动中心1102p和ACC 101p之间的距离。
在本典型实施例中,表达式(1)是当通过二阶积分ACC 101p的输出来计算位移Y并且一阶积分陀螺仪6807p的输出以计算角度θ时用于计算转动半径L的表达式。表达式(2)是当通过一阶积分ACC 101p的输出来计算速度V并且当基于陀螺仪6807p的输出来计算出角速度ω时用于计算转动半径L的表达式。可以使用这两个表达式(1)和(2)来计算转动半径L。
可以通过下面的表达式(3)计算图像面上可能发生的振动δ:
δ=(1+β)fθ+βY (3)
其中,“Y”表示摄像光学系统的主点处的平行振动,“θ”表示摄像光学系统的振动角度,“f”表示摄像光学系统的焦距,“β” 表示摄像倍率。
可以基于与摄像光学系统的变焦和调焦有关的信息、摄像倍率β和焦距信息f,来计算表达式(3)右边的第一项的“f”和“β”。可以基于陀螺仪6807p的积分结果来计算振动角度θ。因此,参考图3通过使用以上所述的信息,可以校正角振动。
可以基于ACC 101p的二阶积分值Y和可基于变焦和调焦信息302计算出的摄像倍率β,来计算表达式(3)右边的第二项。因此,参考图3通过使用以上所述的信息,可以校正平行振动。
然而,在本典型实施例中,对于振动δ执行图像抖动的校正,其中,可以通过下面的表达式(4)获得振动δ,表达式(4)是表达式(3)的变形:
δ=(1+β)fθ+βLθ (4)
更具体地,关于平行振动,本典型实施例不使用可基于ACC101p的检测结果直接计算出的位移Y。
在本典型实施例中,基于可根据表达式(1)或(2)计算出的转动半径L,并且还基于陀螺仪6807p的输出的积分结果、与变焦和调焦有关的信息、以及可基于变焦和调焦信息计算出的摄像倍率β,来校正图像抖动。关于表达式(4),右边的第一项是角振动校正目标值,右边的第二项是平行振动校正目标值。
在本典型实施例中,ACC 101p被设置在摄像光学系统的镜头的主点处。转动半径L 1101p等于转动中心1102p和摄像光学系统的镜头的主点之间的距离。
可以通过二阶积分ACC 101p的输出来计算上述值Y。因此,可以根据表达式(3)校正平行振动。然而,由于以下原因,本典型实施例使用表达式(4)来校正平行振动。
图12是示出根据本典型实施例的ACC 101p的信号检测系统的例子的框图。更具体地,图12示出围绕转动中心1102p(图 11)的振动角度θ和当输入振动角度θ时可能发生的镜头主点处的平行振动的位移Y 101pb之间的关系。
当将振动角度θ的振动输入至ACC 101p时,ACC 101p检测由于该振动所引起的照相机倾斜而施加的重力分量的变化。在振动角度θ不大的范围内,根据所施加的重力的变化而输出的重力加速度α1(电路单元1201的输出)与振动角度θ成比例。
可以通过将振动角度θ乘以转动半径L 1101p(图11)获得平行振动位移Y’(电路单元1202的输出)。ACC 101p输出可以通过利用电路单元1203二阶微分平行振动位移Y’所获得的平行振动加速度α2。
此外,ACC 101p的输出可以包括叠加在该输出上的噪声。在实际情况下,该噪声包括不管频率如何都恒定的噪声和根据频率而改变的噪声。在本典型实施例中,假定噪声不依赖于频率,并且与振动角度θ成比例地改变。
在本典型实施例中,噪声处理电路单元1204输出噪声加速度α3。从ACC 101p输出加速度α1、α2和α3的和。利用电路单元1205二阶积分ACC 101p的输出。因此,可以获得平行振动位移Y。
可以通过下面的表达式(5)表示图12所示的信号检测系统:
其中,“G”表示重力加速度比例项,“L”表示转动半径,“k”表示噪声比例项,“ω”表示角频率。
表达式(5)右边的第一项包括加速度输出(从电路单元1201输出的加速度α1的分量)和重力加速度输出(从电路单元1202输出的加速度α2的分量)的项。表达式(5)右边的第二项包括噪声 (从电路单元1204输出的加速度α3的分量)的项。
在本典型实施例中,将加速度输出和重力加速度输出这两者与振动角度θ的相位相关联,而不将噪声与振动角度θ的相位相关联。因此,表达式(5)的右边包括两个独立项。如果为了简化说明而忽略这两项各自的相位,则下面的表达式(6)和(7)可以成立:
更具体地,关于平行振动的位移,重力加速度和噪声主要在低频带中表达式(7)的等式成立的各频率(表达式(6)的结果为“0”的各频率)下起作用。因此,仅在高频带中可以高精度地检测平行振动的位移。
图13是根据检测振动的实际结果向表达式(6)应用转动半径L等的值时的情况的伯德图。参考图13,在水平轴上示出频率,而在垂直轴上示出相对输入振动角度θ的由ACC 101p检测到的平行振动位移Y的增益。用于缩放增益的缩放单位为“倍”。
如果增益的缩放比例是一次方,则表示对于输入振动角度θ精确地计算平行振动Y。在图13所示的例子中,检测到1.3Hz下的增益1301非常低,这是因为重力加速度和噪声抵消了由ACC 101p检测到的平行振动加速度。
此外,在图13所示的例子中,在1.3Hz以下的频带中,由于重力加速度和噪声主要在1.3Hz以下的频带中起作用,因而ACC 101p的输出随着频率变低而增大。另一方面,如箭头1302所示,在1.3Hz以上,ACC 101p检测到的输出的精度高。
如图13所示的例子中的箭头404所示,振动带的范围从1到 10Hz,在该范围内,重力加速度和噪声起作用。因此,不利用ACC 101p检测平行振动。在这点上,为了通过使用ACC 101p的精确频带(以箭头1302表示)来检测平行振动,本典型实施例使用表达式(4)来代替表达式(3)。
更具体地,本典型实施例通过比较加速度输出一阶积分值和角速度输出,或者通过比较加速度输出二阶积分值和角速度输出一阶积分值,来计算转动半径L。此外,本典型实施例使用用于基于计算出的转动半径L和角速度输出计算平行振动分量的表达式。
本典型实施例比较ACC 101p的输出和陀螺仪6807p的输出(将加速度输出除以角速度输出),以计算转动半径L。在这点上,本典型实施例通过仅在箭头1302(图13)所表示的带中提取和比较加速度输出和角速度输出,来抑制或降低受到重力加速度和噪声的上述影响。
在本典型实施例中,图3所示的陀螺仪BPF单元306和ACCBPF单元307两者是仅在5Hz带中提取输出的相同带通滤波器(BPF)。图14示出陀螺仪BPF单元306和ACC BPF单元307的特性。
在图14所示的例子中,在水平轴上示出频率,而在垂直轴上示出陀螺仪BPF单元306或ACC BPF单元307的输出与输入的HPF相位调整单元304或HPF积分滤波器305的输出的比的增益1401和相位1402。以db为单位表示增益1401。
关于滤波器特性,5Hz信号通过滤波器,但是0.5Hz信号或50Hz信号被衰减。更具体地,5Hz信号通过滤波器,并且由于5Hz信号的增益为0db,因而5Hz信号从该滤波器原样输出。另一方面,由于0.5Hz信号或50Hz信号的增益为-20db,因而通过该滤波器将0.5Hz信号或50Hz信号衰减成十分之一。
如果使用高阶滤波器以更有效地指定要提取的频率,这也是有用的。更具体地,如果设置具有下面的特性的二阶BPF滤波器也是有用的:如图15的增益1501所示,5Hz信号通过该滤波器(由于5Hz信号的增益为0db,因而从该滤波器原样输出输入信号),但是0.5Hz信号或50Hz信号通过该滤波器被衰减(由于该信号的增益为-40db,因而被衰减成百分之一)。
关于相位1502,在5Hz信号的情况下,与输入信号有关的输出的相位为“0”,但是,跨5Hz的频率可能变化很大。然而,由于仅想要比较陀螺仪BPF单元306和ACC BPF单元307的输出,因而,如果来自陀螺仪BPF单元306和ACC BPF单元307的输出的相位变化相同,则相位变化不会产生问题。
关于HPF相位调整单元304和HPF积分滤波器305的转折频率,仅为了比较角速度输出和速度输出,没有必要使用与HPF积分滤波器301的转折频率相同的转折频率。因此,如果将HPF转折频率设置成例如1Hz的高频以提高滤除DC分量的能力,这是有用的。另外,如果速度输出也是有用的。因此,如果将积分转折频率设置成例如1Hz的高频,这是有用的。
通常,在执行HPF处理和积分时,如果转折频率变低,则实现稳定状态所用的时间变长。在这点上,可以通过将转折频率设置成高频来减少实现稳定状态所用的时间。在这种情况下,为了提高比较精度,如果HPF相位调整单元304中发生的相位变化和HPF积分滤波器305中发生的相位变化相同,这也是有用的。
图16是示出HPF积分滤波器305的特性的例子的伯德图。通过HPF处理滤除ACC 101p的输出(以下还可简称为“ACC输出”)的DC分量。然后,使该输出经过积分。然后,将积分后的输出转换成速度。在图16所示的例子中,在水平轴上示出频率。以 db为单位在垂直轴上示出HPF积分滤波器305的输出与加速度输出的比的增益。
参考图16,关于增益1601,作为其特性,1Hz以下的低频被衰减,并且高于1Hz的高频被积分(增益与频率成比例衰减)。这里,为了仅关注并特别说明要通过ACC BPF单元307提取的5Hz频率的情况,如箭头1603所示,相位1602相对作为积分后的理想相位的-90度相位有不足23度的延迟。因此,如果对于HPF相位调整单元304在5Hz频率下发生不足23度的延迟,这对于比较可能是有用的。
图17是示出根据本典型实施例的HPF相位调整单元304的示例性特性的伯德图。通过HPF处理滤除陀螺仪6807p的输出(以下还可简称为“陀螺仪输出”)的DC分量。
在图17所示的例子中,在水平轴上示出频率。以db为单位在垂直轴上示出HPF相位调整单元304的输出与陀螺仪输出的比的增益。
参考图17,关于增益1701,作为特性,1Hz以下的低频被衰减。现在,为了仅关注并特别说明要通过陀螺仪BPF单元306提取的5Hz频率的情况,如箭头1703所示,5Hz下的相位1702相对0度相位超前23度,这与HPF积分滤波器305中发生的相位的变化相同。这是因为,在本典型实施例中,使用还包括上述HPF的二阶HPF作为相位调整单元。
这里假定省略相位调整单元,并且使用类似于HPF积分滤波器305的HPF的一阶HPF。在这种情况下,如图18所示,尽管5Hz下的增益1801的变化非常小,但是5Hz下的相位1802超前了11度,如图18中的箭头1803所示。也就是说,HPF积分滤波器305的位移不是23度。
因此,本典型实施例使用作为相位调整单元而另外设置的 HPF单元,以将HPF积分滤波器305中的加速度输出的相位和HPF相位调整单元304中的角速度输出的相位的位移调整成相同水平。
如上所述,本典型实施例比较图14和15所示的频带(以下还称为“第一频带”)中的陀螺仪6807p和ACC 101p的输出,其中,该频带窄于图10所示的频带(以下还称为“第二频带”)。利用上述结构,本典型实施例可以执行对衰减叠加在加速度输出上的重力分量和噪声之后的加速度输出和角速度输出的高精度比较。
返回图3,比较单元308通过比较陀螺仪BPF单元306的输出ω和ACC BPF单元307的输出V,利用下面的表达式(8)计算转动半径L:
L=V/ω (8)
此外,通过使用计算出的转动半径L,本典型实施例根据上述表达式(4)校正图像抖动。而且,本典型实施例将由比较单元308计算出的转动半径L乘以增益调整单元311的输出。然后,输出校正单元309将结果得到的值设置为平行振动校正目标值。
根据包括诸如转动半径L、振动角度输出(振动角度θ)和摄像倍率β(可以基于变焦和调焦信息302计算摄像倍率β)等的项的表达式(4),如图19所示,如果将HPF积分滤波器301的输出直接乘以转动半径L(校正值),这似乎是有用的。
然而,本典型实施例不使用HPF积分滤波器301的输出作为校正值,而是由于下面的原因,作为如图3所示的专用平行振动校正单元,包括HPF积分滤波器310和增益调整单元311。
下面详细说明图3所示的增益调整单元311的功能。如上所述,可以通过使用表达式(8)计算转动半径L。然而,严格地说,对于要提取的各频率,转动半径L可以不同。
图20示出当图3所示的陀螺仪BPF单元306和ACC BPF单元307要提取的频率的范围是1~10Hz时的转动半径L的示例性变化。
在图20所示的例子中,在水平轴上示出频率。以db为单位在垂直轴上示出各频率的转动半径L与5Hz频率下的转动半径L的比。
参考图20,转动半径L的变化2001与频率成比例减小。具体地,转动半径L的减小2001表示围绕照相机和拍摄者之间的接触点(例如,拍摄者的面部)发生了高频振动。频率变得越低,转动中心变得距离照相机越远(例如,从拍摄者的面部到肘部)。因此,针对各频率计算出不同的转动半径L。
然而,没有提供输出校正单元309可以用来缩放角速度积分输出(振动角度θ)的多个校正值。因此,增益调整单元311对HPF积分滤波器310的角速度积分输出(振动角度θ)提供不同特性。因此,即使当执行与特定校正值的相乘时,本典型实施例也可以获得各频率的最佳平行振动校正目标值。因此,增益调整单元311通过调整作为与校正值相乘的对象的来自陀螺仪6807p的积分输出的特性,来调整在相乘时用作校正值的转动半径L的变化。
图21是示出根据本典型实施例的增益调整单元311的操作的例子的伯德图。在图21所示的例子中,在水平轴上示出频率。以db为单位在垂直轴上示出增益调整单元311的输出与HPF积分滤波器310的输出的比。在垂直轴上还示出输出的相位。
在图21所示的例子中,增益2101的频率变得越高,输出与频率的升高基本成比例衰减得越多。在这点上,例如,当在5Hz频率下提取的情况下,输出校正单元309将增益调整单元311的输出乘以作为特定校正值的转动半径L时,则可以获得与在下 面的情况下所获得的结果类似的结果:对于各频率,将HPF积分滤波器310的输出乘以不同的转动半径L(图20)。
然而,在图21所示的例子中,相位2102在振动带404中极大地移位。在这点上,在频率1Hz下,如箭头2103所示,相位延迟了18度。在这点上,在本典型实施例中,为了抵消相位的延迟,HPF积分滤波器310的特性不同于HPF积分滤波器301的特性。
如上所述,对于HPF和积分这两者,将HPF积分滤波器301的转折频率设置成频率0.1Hz。因此,本典型实施例将振动下限频率1Hz下的相移减小。另一方面,在本典型实施例中,将HPF积分滤波器310的积分转折频率设置成0.5Hz。
图22是示出根据本典型实施例的HPF积分滤波器310的操作的伯德图。在图22所示的例子中,在水平轴上示出频率。以db为单位在垂直轴上示出HPF积分滤波器310的输出与陀螺仪的输出的比。在垂直轴上还示出输出的相位。
参考图22,增益2201在振动带404中具有充分的积分特性。例如,在振动带404中,输出与频率成比例减小。然而,如箭头2203所示,相位2202的相位延迟在振动下限频率下不足34度。更具体地,当发生90度相位延迟是适当的时,实际发生了仅56度的相位延迟。
然而,关于已通过HPF积分滤波器310和增益调整单元311这两者的来自陀螺仪的信号,增益调整之后的相位延迟可以抵消HPF积分滤波器310中的相位延迟的不足。
图23是示出根据本典型实施例已通过HPF积分滤波器310和增益调整单元311这两者从陀螺仪输出的信号的示例性特性的伯德图。在图23所示的例子中,在水平轴上示出频率。以db为单位在垂直轴上示出HPF积分滤波器310的输出与陀螺仪输 出的比。在垂直轴上还示出输出的相位。
参考图23,关于增益2301,在振动带404中获得充分的积分特性(例如,输出与频率成比例地减小)和用于校正转动半径对于频率的依赖性的特性。关于相位2302,在振动带404中,如箭头2303所示,在振动下限频率下发生了仅16度的相对小的相位不足。
如上所述,如果输出校正单元309将增益调整单元311的输出乘以作为特定校正值的5Hz频率下的转动半径L,则可以获得与对于各频率将HPF积分滤波器310的输出乘以不同转动半径L(图20)的结果大体类似的结果。
如以上参考图3所述,本典型实施例包括陀螺仪BPF单元306和ACC BPF单元307。此外,本典型实施例在窄于图10所示的频带(第二频带)的、图14和15所示的频带(第一频带)中比较陀螺仪6807p和ACC 101p的输出。因此,本典型实施例可以执行对衰减叠加在加速度输出上的重力分量和噪声之后的加速度输出和角速度输出的高精度比较。
此外,本典型实施例根据陀螺仪6807p的输出来计算角振动校正目标值和平行振动校正目标值。在这点上,如图3所示,本典型实施例利用HPF积分滤波器301计算角振动校正目标值,并且利用HPF积分滤波器310计算平行振动校正目标值。
更具体地,在本典型实施例中,角振动的频带和平行振动的频带相互不同。此外,本典型实施例通过使用增益调整单元311,设置与角振动校正目标值的计算中所使用的频率特性不同的频率特性。
利用上述结构,本典型实施例可以高精度地校正角振动和平行振动中的每一个。用于在窄频带(第一频带)中提取角速度输出和加速度输出的上述方法不局限于BPF处理。
图24示出根据本典型实施例的图像稳定控制设备的另一示例性结构,其中,该图像稳定控制设备被配置成利用傅立叶变换计算期望执行比较的频率下的陀螺仪6807p和ACC 101p的谱,并且利用比较单元308对该结果进行比较。
参考图24,陀螺仪傅立叶变换单元2401和ACC傅立叶变换单元2402各自通过将陀螺仪输出和ACC输出乘以要提取的频率分量并且积分相乘结果来计算谱。
可以通过下面的表达式(9)表示ACC 101p的谱,同时可以通过下面的表达式(10)表示陀螺仪的谱。这里注意,考虑到下面进一步所述的关于相位的说明,不通过复杂正弦波来表示表达式(9)和(10)。
其中,“f”表示要提取的频率(例如,f=5Hz),“n”表示整数(例如,n=1),“G(t)”表示在要提取的频率下在速度的各采样时刻的输出,“H(t)”表示在要提取的频率下在角速度的各采样时刻的输出。
表达式(9)和(10)分别表示要提取的频率的整数倍周期的正弦波和余弦波的定积分值的合成。在通过使用表达式(9)和(10)的计算结果计算出速度和角速度之后,可以通过使用表达式(8)来计算转动半径L。
在图3所示的例子中,通过使用使ACC 101p的积分输出(速度)的频率分量通过的BPF,计算要提取的频率分量的速度的大小。此外,通过使用使陀螺仪6807p输出的频率分量通过的BPF,计算要提取的频率分量的速度的大小。而且,通过比较结果得到的频率分量的大小,计算转动半径L。
在图24所示的例子中,本典型实施例利用傅立叶变换计算ACC 101p的积分输出(速度)的要提取的频率分量的谱。相似地,本典型实施例利用傅立叶变换计算陀螺仪6807p的输出的频率分量的谱。此外,本典型实施例比较该谱以计算转动半径L。
在本典型实施例中,代替图24所示的HPF相位调整单元304和HPF积分滤波器305,而设置HPF积分相位调整单元2501和2601以及HPF二阶积分滤波器2502和2602,如图25和26所示。
如果通过使用下面的表达式(11)来计算转动半径L,这也是有用的,其中,表达式(11)包括角度θ和位移Y等项,角度θ是陀螺仪6807p的输出ω的积分,位移Y通过二阶积分ACC 101p的输出α来计算。
L=Y/θ (11)
以上述方式,通过积分角速度输出和二阶积分加速度,可以降低源自高频分量的噪声的影响。因此,本典型实施例可以稳定且确保计算出转动半径L。
下面详细说明作为应用表达式(8)或(11)的结果、用于实际计算转动半径L的方法。在使用表达式(11)的方法中,执行与使用表达式(8)的情况下的处理类似的处理,其中,在表达式(11)中,比较角度θ和位移Y以计算L。
当使用BPF时,如图27所示,以预定时间周期的间隔对HPF相位调整单元304的输出波形2701和HPF积分滤波器305的输出波形2702进行采样。将输出波形2701的采样结果设置为角速度 ω1,而将输出波形2702的采样结果设置为速度V1。在图27所示的例子中,在水平轴上示出时间,而在垂直轴上示出BPF后的角速度和加速度。
参考图27,箭头2703~2709表示采样周期。箭头2710(ω1)、2711(ω2)、2712(ω3)、2713(ω4)、2714(ω5)、2715(ω6)和2716(ω7)均表示上述采样周期中的角速度之间的差ωn。箭头2717(V1)、2718(V2)、2719(V3)、2720(V4)、2721(V5)、2722(V6)和2723(V7)均表示上述采样周期中的速度之间的差Vn。
将所提取的频率的周期的一半设置为采样周期。在这点上,例如,如果提取5Hz频率,则设置0.1秒的采样周期。
在本典型实施例中,使用表达式(8),基于在周期2703中计算出的角速度差ω1和速度差V1,计算转动半径L1。类似地,根据随后的采样,使用表达式(8),基于角速度差ω2和速度差V2,计算转动半径L2。
通过以上述方式顺序计算转动半径L并平均所计算出的转动半径L,计算出稳定的转动半径L。通过下面的表达式(12)计算平均值:
其中,“n”表示采样操作的次数。
本典型实施例使用以上述方式计算出的转动半径L,并且还使用上述表达式(4)计算图像面上发生的振动的量,以校正图像抖动。更具体地,本典型实施例将使用表达式(12)计算出的转动半径L作为校正值输出至输出校正单元309(图3)。
在本典型实施例中,代替通过使用各采样周期中的转动半径Li(例如,转动半径L1)和表达式(4)来计算在特定时刻图像面 上的振动量以校正在特定时刻发生的图像抖动,而计算针对采样周期计算出的转动半径L的平均值,并且通过使用表达式(4),基于计算出的平均值来计算图像面上发生的振动的量。在这点上,下面是采用该结构的原因。
角速度输出和加速度输出自然包括大量噪声分量。因此,仅针对一个周期计算出的转动半径L的可靠性低。在这点上,本典型实施例使用转动半径L的平均值以计算稳定的转动半径L。
如上所述,本典型实施例基于各周期中的采样的结果,计算转动半径L。然而,本典型实施例不局限于此。例如,可以使用利用波形的峰的方法或利用波形的面积的方法。
图28示出利用波形的峰的方法的例子。在图28所示的例子中,在水平轴示出时间,而在垂直轴上示出BPF后的角速度和加速度。
参考图28,箭头2801、2802和2803是采样周期。箭头2804(ω1)、2805(ω2)和2806(ω3)均表示采样周期期间最大值和最小值之间的角速度差ωn。箭头2807(V1)、2808(V2)和2809(V3)均表示采样周期期间的速度差Vn。
将所提取的频率的一个周期设置为采样周期。在这点上,例如,如果提取5Hz频率,则设置0.2秒的采样周期。
在本典型实施例中,基于在周期2801中计算出的角速度差ω1和速度差V1,并且通过使用表达式(8),计算转动半径L1。类似地,根据随后的采样,基于角速度差ω2和速度差V2,并且通过使用表达式(8),计算转动半径L2。
通过以上述方式顺序计算转动半径L并且平均计算出的转动半径L,通过使用上面的表达式(12)计算稳定的转动半径L。
图29示出利用波形的面积的方法的例子。在图29所示的例 子中,在水平轴上示出时间,而在垂直轴上示出BPF后的角速度和通过积分加速度计算出的速度。
参考图29,波形2901表示角速度输出(HPF相位调整单元304的输出)的绝对值的波形。波形2902表示速度输出(HPF积分滤波器305的输出)的绝对值的波形。
箭头2903表示采样期间,该采样期间例如为从按下照相机的主电源开关起到开始拍摄为止的时间段。该采样期间还可以是从半按下照相机的释放按钮6804a起到开始拍摄为止的时间段、或者是从照相机的姿势已变得稳定的时刻开始到完成聚焦于被摄体或到检测到被摄体距离的时刻为止的时间段。在以阴影线表示的采样期间2903,本典型实施例计算波形2901的面积2904和波形2902的面积2905。
面积2904(Sω)和面积2905(Sv)可以满足下面的条件(13)和(14):
其中,“T”表示采样期间2903。
因此,可以通过下面用于计算转动半径L的平均值的表达式(15)来计算转动半径L:
如上所述,通过使用采样期间的面积,可以计算出不受噪声或瞬时干扰影响的稳定的转动半径L。
下面详细说明基于如图24所示通过执行傅立叶变换而不是执行BPF计算谱的结果来计算转动半径L的方法。
在该方法中,首先,通过使用表达式(9)和(10)计算通过积分加速度输出所计算出的速度的谱VF和谱ωF。然后,通过使用下面的表达式(16)计算转动半径LF:
在这种情况下,以“f”代替表达式(9)和(10)中的“n”,并且将“f”的值设置为要提取的频率的一个周期。更具体地,本典型实施例基于图28所示的各采样周期2801、2802和2803的谱VF和ωF,计算转动半径LF。此外,本典型实施例平均针对各周期计算出的转动半径LF,并且将结果得到的平均值作为校正值输出至输出校正单元309(图24)。
可选地,如果通过使用表达式(9)和(10)计算采样期间2903(图29)的谱VF和ωF,这也是有用的。在这种情况下,本典型实施例可以基于计算谱的结果,通过使用表达式(16)计算转动半径LF。此外,在这种情况下,尽管本典型实施例没有平均转动半径LF,但是作为计算谱VF和ωF所用的长时间段的结果对谱VF和ωF进行平均。因此,本典型实施例可以计算稳定的转动半径L。
图30是示出根据本典型实施例用于校正上述角振动和平行振动的处理的时序图。在图30所示的例子中,在水平轴上示出时间。各垂直轴的上部表示高(Hi)状态,而各垂直轴的下部表示低(Lo)状态。
参考图30,状态3001表示照相机6804的主电源开关的状态(主电源的状态)。“Hi”状态表示主电源开关处于接通(on),而“Lo”状态表示“切断(off)”状态。状态3002表示开关S1的状态, 通过半按下释放按钮6804a将开关S1设置为“接通”。“Hi”表示将开关S1设置成“接通”(半按下状态),而“Lo”表示“切断”状态(半按下释放状态)。状态3003表示开关S2的状态,通过完全按下释放按钮6804a将开关S2设置成“接通”。“Hi”表示将开关S2设置成“接通”(完全按下状态),而“Lo”表示“切断”状态(半按下状态)。
操作3004表示用于驱动快速复原镜、快门或光圈的操作。更具体地,操作3004表示用于确保对于将被摄体信息存储在图像传感器6805上最佳的拍摄光路的操作。“Hi”表示“操作进行”状态。“Lo”表示操作暂停状态。
状态3005表示用于将被摄体信息存储在图像传感器6805上的曝光操作的状态。“Hi”表示“操作进行”状态。“Lo”表示复位被摄体信息的存储。在实际操作中,除曝光操作以外,还执行用于将被摄体信息存储在图像传感器6805上并且将被摄体的图像显示在设置于照相机机体背面的监视器上的操作。然而,由于该操作对于本发明来说并非必不可少,因而图30未示出该操作。
状态3006表示焦点检测操作的状态,该焦点检测操作用于利用自动调焦(AF)传感器(未示出)检测已通过镜头6801的摄像光学系统的被摄体光束的调焦状态。“Hi”表示“焦点检测操作进行”状态。“Lo”表示“焦点检测操作未进行”状态。
状态3007表示用于驱动AF透镜的操作的状态,该操作被配置成:在接收到来自AF传感器(未示出)的信号之后,通过向被摄体侧移动可更换镜头6801的摄像光学系统的镜头单元的一部分或全部,来调整调焦状态。“Hi”表示“镜头调整操作进行”状态。“Lo”表示“镜头调整操作未进行”状态。
状态3008表示用于检测陀螺仪6807p和ACC 101p的操作的状态。“Hi”表示“陀螺仪(或ACC)检测操作进行”状态。“Lo”表示 “陀螺仪(或ACC)检测操作未进行”状态。
状态3009表示转动半径检测操作的状态,该转动半径检测操作用于基于角速度输出和加速度输出检测转动半径L。“Hi”表示“计算操作进行”状态。“Lo”表示“计算操作未进行”状态。
状态3010表示用于利用振动校正单元6806校正角振动的角振动校正操作的状态。“Hi”表示“角振动校正操作进行”状态。“Lo”表示“角振动校正操作未进行”状态。
状态3011表示用于利用振动校正单元6806校正平行振动的平行振动校正操作的状态。“Hi”表示“平行振动校正操作进行”状态。“Lo”表示“平行振动校正操作未进行”状态。
下面参考图30的时序图,详细说明当在时刻t1按下主电源开关时对照相机6804的各组件所执行的上述操作。
参考图30,在时刻t2,拍摄者半按下释放按钮6804a(开关S1处于“接通”状态)(状态3002从“Lo”状态变换成“Hi”状态)。与释放按钮6804a的半按下同步地,AF传感器(未示出)开始检测调焦状态(状态3006从“Lo”状态变换成“Hi”状态)。另外,陀螺仪6807p和ACC 101p开始它们的操作(状态3008从“Lo”状态变换成“Hi”状态)。
如果拍摄者半按下了释放按钮6804a,则照相机处于用于拍摄被摄体的稳定状态(处于对照相机没有施加大的振动的状态)。因此,在这种状态下,本典型实施例可以执行ACC 101p和陀螺仪6807p的稳定计算。
在这种状态下,基于ACC 101p和陀螺仪6807p的输出,开始转动半径L的计算(状态3009从“Lo”状态变换成“Hi”状态)。另外,开始角振动的校正(状态3010从“Lo”状态变换成“Hi”状态)。
在时刻t3,在基于来自AF传感器(未示出)的信号计算出摄像光学系统的调焦状态之后,通过向被摄体侧移动摄像光学系 统的一部分或全部,来调整调焦状态(状态3007从“Lo”状态变换成“Hi”状态)。同时,因为此时由于通过驱动摄像光学系统所引起的对ACC 101p施加的振动而导致不能精确检测到振动,因而暂停转动半径L的计算(状态3009从“Hi”状态变换成“Lo”状态)。
由于下面的原因,在时刻t3暂停转动半径L的计算。
如以上参考图3所述,对于ACC 101p的输出,本典型实施例仅提取特定频率(例如,5Hz)。因此,尽管上述驱动噪声通常衰减成无影响水平,但是,如果在不利的工作条件下例如由于透镜的驱动而存在过大振动,则ACC 101p的输出可能变得饱和。
如果加速度输出饱和,则不能检测到所有频带中的振动。在这种情况下,ACC 101p仅输出错误信号。如果通过使用该错误信号来计算转动半径L,则可能不适当且不充分地校正平行振动。
为了防止此情况发生,本典型实施例在用于调焦的透镜(调焦透镜)驱动操作期间暂停计算转动半径L。
通过使用具有宽加速度检测范围的ACC(能够检测非常高的加速度的ACC),可以抑制由于源自透镜驱动的振动而可能发生的饱和。然而,这类具有宽检测范围的ACC检测振动等微小加速度的精度低。因此,如果使用这种类型的ACC,则不能检测到稳定的转动半径。
在这点上,本典型实施例使用具有高振动检测精度的ACC,尽管该ACC的加速度检测范围相对较窄。因此,本典型实施例防止使用在输入源自干扰的振动时输出的ACC信号来计算转动半径。
在时刻t4,透镜到达目标位置,并且停止驱动透镜(状态3007从“Hi”状态变换成“Lo”状态)。与暂停驱动透镜同步地,AF 传感器(未示出)再次检测调焦状态,以判断是否实现了想要的调焦状态(状态3006从“Lo”状态变换成“Hi”状态)。
在时刻t5,由于判断为实现了AF的想要的调焦状态,因而结束检测调焦状态(状态3006从“Hi”状态变换成“Lo”状态)。另一方面,如果判断为没有实现想要的调焦状态,则再次驱动透镜以重复调整调焦状态,直到实现了想要的调焦状态为止。
另外,如果判断为实现了想要的调焦状态,则因为在时刻t5及时刻t5之后,不存在向ACC施加由于透镜驱动而发生的干扰振动的可能性,因而重新开始用于计算转动半径的操作(状态3006从“Lo”状态变换成“Hi”状态)。
当在时刻t5停止驱动透镜时,本典型实施例基于镜头单元的驱动量,计算被摄体距离。此外,本典型实施例基于变焦信息计算摄像倍率,并且在设置平行振动校正目标值时使用计算出的摄像倍率。
在时刻t6,当拍摄者完全按下释放按钮6804a时,开关S2处于“接通”状态(状态3003从“Lo”状态变换成“Hi”状态)。与完全按下释放按钮6804a同步地,本典型实施例使得可更换镜头6801的光圈工作,执行照相机6804的快速复原镜的镜上升(mirror-up)操作,并且打开快门(状态3004从“Lo”状态变换成“Hi”状态)。
另外,本典型实施例停止计算转动半径L(状态3009从“Hi”状态变换成“Lo”状态),以防止由于因光圈的孔径缩小、快速复原镜的镜上升操作或打开快门等操作而发生的振动所引起的ACC 101p的饱和,使得转动半径L的计算精度下降。
在时刻t7,本典型实施例开始曝光操作(状态3005从“Lo”状态变换成“Hi”状态)。与开始曝光操作同步地,开始平行振动的校正(状态3011从“Lo”状态变换成“Hi”状态)。
本典型实施例使用下面的平均值的平均作为校正平行振 动时的转动半径L:在时刻t2~时刻t3的时间段期间计算出的转动半径L的平均值和在时刻t5~时刻t6的时间段期间计算出的转动半径L的平均值。
在时刻t8,结束曝光(状态3005从“Hi”状态变换成“Lo”状态)。此外,也结束平行振动的校正(状态3011从“Hi”状态变换成“Lo”状态)。
如上所述,本典型实施例仅在曝光时间段期间执行平行振动的校正。这是因为,如果除角振动的校正以外,还执行平行振动的校正,则需要振动校正单元6806的大量冲程来进行校正,结果导致需要大尺寸的振动校正单元6806,这也导致可更换镜头6801的可操作性下降。
因此,本典型实施例在曝光期间的短的时间段期间执行平行振动的校正,并且在曝光期间之后返回到用于仅执行角振动的校正的模式。
在时刻t8和时刻t9期间,本典型实施例关闭快门,打开光圈的孔径,并且执行快速复原镜的镜下降操作(状态3004处于“Hi”状态)。另外,本典型实施例暂停计算转动半径L,直到时刻t9到达为止(状态3009处于“Lo”状态),以防止转动半径L的计算精度下降,否则如上所述,可能由于因在增大光圈的孔径、执行快速复原镜的镜下降操作或者关闭快门时发生的振动而引起的ACC的饱和,导致发生转动半径L的计算精度下降。
在时刻t9,重新开始计算转动半径L(状态3009从“Lo”状态变换成“Hi”状态)。在时刻t10,用户释放释放按钮6804a的完全按下(开关S2处于“接通”状态),并且开关S2变换成半按下状态(状态3003从“Hi”状态变换成“Lo”状态)。
在时刻t11,通过完全按下释放按钮6804a,开关S2再次处于“接通”状态(状态3003从“Lo”状态变换成“Hi”状态)。与完全按 下释放按钮6804a同步地,在时刻t12之前,本典型实施例增大可更换镜头6801的光圈的孔径,执行照相机6804的快速复原镜的镜上升操作,并且打开快门(状态3004从“Lo”状态变换成“Hi”状态)。此外,本典型实施例暂停计算转动半径L(状态3009从“Hi”状态变换成“Lo”状态)。
在时刻t12,本典型实施例开始曝光(状态3005从“Lo”状态变换成“Hi”状态)。与开始曝光同步地,开始平行振动的校正(状态3011从“Lo”状态变换成“Hi”状态)。
本典型实施例使用下面的平均值的平均作为校正平行振动时的转动半径L:在时刻t2~时刻t3的时间段期间计算出的转动半径L的平均值、在时刻t5~时刻t6的时间段期间计算出的转动半径L的平均值和在时刻t9~时刻t11的时间段期间计算出的转动半径L的平均值。
如上所述,在正半按下释放按钮6804a的时间段期间(开关S1处于“接通”状态),不复位转动半径L,并且计算累积转动半径L的平均。
在时刻t13,结束曝光(状态3005从“Hi”状态变换成“Lo”状态)。此外,还结束平行振动的校正(状态3011从“Hi”状态变换成“Lo”状态)。在时刻t13和时刻t14期间,本典型实施例关闭快门,释放缩小的光圈孔径,并且执行照相机6804的快速复原镜的镜下降操作(状态3004处于“Hi”状态)。
此外,在时刻t11~时刻t14的时间段期间,暂停转动半径L的计算(状态3009处于“Lo”状态)。在时刻t14,重新开始转动半径L的计算(状态3009从“Lo”状态变换成“Hi”状态)。
在时刻t15,释放释放按钮6804a的完全按下(开关S2处于“接通”状态)。释放按钮6804a变换成半按下状态(开关S1处于“接通”状态)(状态3003从“Lo”状态变换成“Hi”状态)。
在时刻t16,释放释放按钮6804a的半按下(开关S1处于“接通”状态)(状态3002从“Hi”状态变换成“Lo”状态)。与释放释放按钮6804a的半按下同步地,本典型实施例暂停计算转动半径L(状态3009从“Hi”状态变换成“Lo”状态)。
此外,使已用于计算转动半径L的平均的转动半径L的累积值复位,这是因为,由于在拍摄者半按下释放按钮6804a(开关S1处于“接通”状态)时的时刻保持照相机机体6804的方法的可能变化,因而不能验证是否可以原样使用累积的计算出的转动半径L来校正平行振动。因此,当拍摄者再次半按下释放按钮6804a时,本典型实施例新计算转动半径L。
在从时刻t16经过预定时间长度(例如,四秒)之后的时刻t17,暂停陀螺仪6807p和ACC 101p的操作(状态3008从“Hi”状态变换成“Lo”状态)。此外,还暂停角振动的校正(状态3010从“Hi”状态变换成“Lo”状态)。
在时刻t15,如上所述,当拍摄者再次半按下释放按钮6804a(开关S1处于“接通”状态)时,不暂停陀螺仪6807p和ACC 101p的操作和角振动的校正,以立即执行角振动的校正。
在时刻t18,切断照相机的电源(状态3001从“Hi”状态变换成“Lo”状态)。
尽管在图30的时序图中未示出,但是,当极大改变了照相机的姿势时,本典型实施例暂停计算转动半径L,从而不使用在极大改变了照相机的姿势之后的时间段期间检测到的转动半径L作为用于计算转动半径L的平均的因子。这是因为,如果摇动照相机,或者如果执行用于极大改变照相机的姿势的任何操作,则与拍摄者保持照相机以拍摄被摄体时的转动半径相比,转动半径可能发生改变,从而所计算出的转动半径L可能降低校正平行振动的精度。
在这点上,如果陀螺仪6807p的输出超过了预定值(例如,3deg/s)预定时间长度(例如,0.5秒),则本典型实施例复位由此累积的转动半径L,并且当陀螺仪6807p的输出变低时,新计算转动半径L。类似地,如果ACC 101p的输出超过预定水平的变化(例如,0.2G)预定时间长度(例如,0.5秒),则本典型实施例判断为照相机的姿势被极大地改变。此外,本典型实施例复位由此计算出的转动半径L,并且当ACC 101p的输出的变化变小时,新计算转动半径L。
如果紧挨在时刻t2开始转动半径L的检测之后,拍摄者在时刻t6完全按下释放按钮6804a,则可能不适当地执行转动半径L的计算。在这种情况下,本典型实施例通过使用预定转动半径L来校正平行振动。
如上所述,各频率的振动的转动中心不同。在这点上,高频振动的转动中心位于照相机的目镜单元处,而低频振动的转动中心位于拍摄者的腰部附近。本典型实施例利用具有图21所示的特性的增益调整单元311,以获取并计算不同频率水平的不同转动半径。
由于5Hz频率周围的振动的转动中心位于照相机的目镜单元附近,因而,如果没有可使用的转动半径L,则如图31所示,本典型实施例将从照相机的目镜单元到摄像光学系统的主点位置的距离设置为转动半径3101的初始值。
参考图31,照相机的目镜单元设置在箭头3102所表示的位置处。本典型实施例将转动中心3104和摄像光学系统的主点3105的距离设置为转动半径3101,其中,转动中心3104位于以箭头3102所表示的位置和光轴3103的交点处。这是因为,由于振动校正单元的校正方向定向在与光轴3103垂直的方向上,因而仅要校正该方向上的平行振动分量。
如果紧挨在时刻t2半按下释放按钮6804a之后,拍摄者在时刻t6完全按下了释放按钮6804a,则本典型实施例通过使用该初始值校正平行振动。另一方面,如果在时刻t2半按下释放按钮6804a之后,拍摄者需要足够的时间以在时刻t6完全按下释放按钮6804a,则本典型实施例使用计算出的转动半径L。
而且,由于受保持照相机机体的状态的影响,因而计算出的转动半径L可能大大改变。在这点上,如果拍摄者保持照相机处于几乎无振动发生的状态下,则由于几乎没有振动发生,因而陀螺仪的输出可能变得非常小。
在这种情况下,如果将DC偏压分量叠加在通过积分ACC101p的输出所计算出的速度输出上,并由此输入预定水平的输出,则由表达式(8)计算出的转动半径L可能具有非常大的值。在这种情况下,本典型实施例不使用计算出的转动半径L,而通过使用转动半径L的初始值来校正平行振动。更具体地,如果角速度输出极小,或者计算出的转动半径等于或超过预定值(如果计算出的转动半径等于或超过从摄像光学系统的主点到拍摄者的腰部的距离),则本典型实施例通过使用转动半径L的初始值来校正平行振动。
图32是示出上述结构的例子的流程图。当接通照相机的电源时,开始根据图32的流程的处理。在图32所示的例子中,为了更易于理解本发明的主要结构,省略电池检查操作、测光操作、焦点检测操作、AF用透镜的驱动、用于向闪光灯单元充电的操作或拍摄的操作等照相机所执行的各种控制操作。
在下面的示例性流程中,通过陀螺仪6807p检测照相机的角振动6803p,并且通过ACC 101p检测照相机的平行振动101pb。在这点上,如果通过陀螺仪6807y检测照相机的角振动6803y,并且通过ACC 101y检测照相机的平行振动101yb,则执 行相同流程。此外,如果在图32的流程图的任一步骤期间切断照相机的电源,则结束该流程图的处理。
参考图32,在步骤S3201,镜头CPU 6808判断拍摄者是否半按下了释放按钮6804a(开关S1处于“接通”状态)。如果判断为拍摄者半按下了释放按钮6804a(开关S1处于“接通”状态)(步骤S3201为“是”),则处理进入步骤S3202。
在步骤S3202,镜头CPU 6808启动陀螺仪6807p和ACC101p,并且开始检测振动。同时,镜头CPU 6808启动AF传感器(未示出),并且开始检测调焦状态。在本典型实施例中,由于拍摄者将照相机定向至被摄体,并且照相机由此处于稳定保持状态直到拍摄者半按下释放按钮6804a为止,因而,在拍摄者半按下了释放按钮6804a之后,镜头CPU 6808启动陀螺仪6807p、ACC 101p和AF传感器(未示出)。
在步骤S3203,镜头CPU 6808判断是否获取了陀螺仪6807p的角振动校正目标值。如果判断为获取了陀螺仪6807p的角振动校正目标值(步骤S3203为“是”),则处理进入步骤S3204。另一方面,如果判断为没有获取到陀螺仪6807p的角振动校正目标值(步骤S3203为“否”),则处理进入步骤S3228。由于在实现陀螺仪6807p的积分输出稳定之前需要特定时间(例如,0.5秒),因而在陀螺仪6807p的积分输出(HPF积分滤波器301(图3)的输出)变得稳定之前,不校正角振动。
在步骤S3204,镜头CPU 6808驱动振动校正单元6806,并且开始校正角振动,但是此时不校正平行振动。在步骤S3205,镜头CPU 6808判断是否完成了AF。如果判断为完成了AF(步骤S3205为“是”),则处理进入步骤S 3206。另一方面,如果判断为没有完成AF(步骤S3205为“否”),则处理进入步骤S3228。
现在,在下面详细说明如果在步骤S3205判断为没有完成 AF所执行的处理。
在步骤S3205中判断为没有完成AF之后的步骤中(即在步骤S3228中),本典型实施例从陀螺仪6807p和ACC 101p的输出中提取想要的频率分量,并且如上所述,比较所提取的频率分量以计算转动半径。此外,本典型实施例累积存储周期性计算出的转动半径L。
在步骤S3229,镜头CPU 6808判断是否完成了调焦状态的检测。如果判断为完成了调焦状态的检测(步骤S3229为“是”),则处理进入步骤S3230。另一方面,如果判断为没有完成调焦状态的检测(步骤S3229为“否”),则处理进入步骤S3234。
在步骤S3234,镜头CPU 6808判断是否释放了释放按钮6804a的半按下(开关S1处于“切断”状态)。如果判断为释放了释放按钮6804a的半按下(步骤S3234为“是”),则处理返回到步骤S3201。在步骤S3201,镜头CPU 6808等待,直到拍摄者半按下释放按钮6804a为止。另一方面,如果判断为没有释放释放按钮6804a的半按下(步骤S3234为“否”),则处理返回到步骤S3203。在步骤S3203,镜头CPU 6808判断是否获取了陀螺仪6807p的角振动校正目标值(是否可以校正角振动)。
如果在步骤S3203再次判断为不能校正角振动(步骤S3203为“否”),则处理进入步骤S3228。在步骤S3229,镜头CPU 6808再次判断是否完成了调焦状态的检测。
此外,如果角振动的校正就绪,则处理从步骤S3203进入步骤S3204。在步骤S3204,镜头CPU 6808开始角振动的校正。在步骤S3205,镜头CPU 6808判断是否完成了AF。如果该流程以上述方式进行,则没有完成AF。因此,处理进入步骤S3228。在步骤S3229,镜头CPU 6808再次判断是否完成了调焦状态的检测。
如果判断为完成了调焦状态的检测(步骤S3229为“是”),则处理进入步骤S3230。在步骤S3230,镜头CPU 6808暂停转动半径L的检测,以防止由于在ACC输出上叠加噪声而获取到不适当的转动半径L,其中由于要在随后的步骤中执行的调焦用透镜的驱动而可能发生所述噪声。
在步骤S3231,镜头CPU 6808驱动调焦用透镜。在步骤S3232,镜头CPU 6808判断是否完成了该透镜的驱动。如果判断为完成了该透镜的驱动(步骤S3232为“是”),则处理进入步骤S3233。在步骤S3233,镜头CPU 6808停止驱动该透镜。
另一方面,如果判断为没有完成该透镜的驱动(步骤S3232为“否”),则处理从步骤S3232进入步骤S3234和S3203,然后返回到步骤S3228,或者,从步骤S3232进入步骤S3234、S3203、S3204和S3205,然后返回到步骤S3228。因此,除非释放了释放按钮6804a的半按下,否则镜头CPU 6808作为循环处理执行上述步骤,并且进行等待,直到完成该透镜的驱动为止。
在步骤S3234,镜头CPU 6808判断在步骤S3233停止该透镜的驱动之后是否释放了释放按钮6804a的半按下。如果判断为没有释放释放按钮6804a的半按下(步骤S3234为“否”),则处理返回至步骤S3203。在这种情况下,处理从步骤S3203进入步骤S3204和S3205。在步骤S3205,镜头CPU 6808判断是否完成了AF。如果判断为完成了AF(步骤S3205为“是”),则处理进入步骤S3206。另一方面,如果判断为没有完成AF(步骤S3205为“否”),则处理返回到步骤S3228,在步骤S3228,镜头CPU 6808再次执行调焦操作。
在步骤S3206,镜头CPU 6808以上述方式,如在步骤S3228中一样,累积检测并存储周期性计算出的转动半径L。如果处理已从步骤S3228进入步骤S3206,则由于在步骤S3228中已开 始了转动半径L的检测,因而不执行步骤S3206中的处理。
在步骤S3207,镜头CPU 6808判断照相机是否正被摇动。更具体地,关于用于判断照相机的摇动状况的方法,如果陀螺仪6807p的输出在预定的特定时间段(例如,0.5秒)或更长时间段内具有预定水平(例如,3deg/s)或更大的角速度,则镜头CPU6808判断为照相机正被摇动(沿特定方向振动)。可选地,如果陀螺仪6807p的积分值(HPF积分滤波器301的输出)在预定的特定时间段(例如,0.2秒)或更长时间段内具有预定角度(例如,1.5deg)或更大角度,则镜头CPU 6808可以判断为照相机正被摇动。
如果判断为照相机正被摇动(步骤S3207为“是”),则处理进入步骤S3208。另一方面,如果判断为照相机没有被摇动(步骤S3207为“否”),则处理进入步骤S3211。
在步骤S3208,镜头CPU 6808暂停转动半径L的检测和以箭头6803p(图2)所表示的方向上的角振动的校正。这是因为,当照相机正被摇动时,由于在摇动期间振动不是恒定的,因而不能高精度地检测转动半径L。另外还因为,在摇动期间振动角度大,因此,如果执行角振动的校正,则校正透镜可能到达机械端,结果由于机械限制导致以箭头6803y(图1)所表示的方向上的图像抖动的校正精度下降。
在步骤S3209,镜头CPU 6808再次判断照相机是否正被摇动。如果判断为照相机正被摇动(步骤S3209为“是”),则处理进入步骤S3211。
另一方面,如果判断为结束了摇动(步骤S3209为“否”),则处理进入步骤S3210。在步骤S3210,由于照相机正被拍摄者稳定保持,因而镜头CPU 6808重新开始检测转动半径L,并且还重新开始校正角振动。
在步骤S3211,镜头CPU 6808判断是否释放了释放按钮 6804a的半按下(开关S1处于“切断”状态)。如果判断为释放了释放按钮6804a的半按下,则处理进入步骤S3235。另一方面,如果判断为没有释放释放按钮6804a的半按下(步骤S3211为“否),则处理进入步骤S3212。
在步骤S3235,镜头CUP 6808暂停转动半径L的检测,并且复位累积存储的转动半径L。然后,处理进入步骤S3225。这是因为预测到:拍摄条件将由于切换为拍摄不同被摄体而改变,或者,由于释放了释放按钮6804a的半按下,因而拍摄将要结束。然而,如果紧挨在释放释放按钮6804a的半按下之后拍摄者再次半按下释放按钮6804a(例如,如果在从释放释放按钮6804a的半按下开始的1秒内拍摄者再次半按下释放按钮6804a),如果镜头CPU 6808没有复位所存储的转动半径L,这也是有用的。
在步骤S3225,镜头CPU 6808等待预定时间长度(例如,4秒)。在等待期间,继续进行角振动的校正,并且陀螺仪6807p和ACC 101p继续工作。镜头CPU 6808在释放释放按钮6804a之后的特定时间段内继续校正角振动,以准备当拍摄者再次半按下释放按钮6804a时立即响应。
在经过了预定时间长度之后,处理进入步骤S3226。在步骤S3226,镜头CPU 6808暂停陀螺仪6807p和ACC 101p的操作。然后,处理返回到步骤S3201。
如果在步骤S3211判断为继续半按下释放按钮6804a(步骤S3211为“否“),则处理进入步骤S3212。在步骤S3212,镜头CPU6808判断是否完全按下了释放按钮6804a(开关S2处于“接通”状态)。如果判断为没有完全按下释放按钮6804a(步骤S3212为“否”),则处理返回到步骤S3207,并且重复上述步骤S3207和随后步骤中的处理。更具体地,镜头CPU 6808在校正角振动、检测转动半径L和判断照相机是否正被摇动的同时等待,直到拍 摄开始为止。
另一方面,如果判断为完全按下了释放按钮6804a以开始拍摄(步骤S3212为“是”),则处理进入步骤S3213。在步骤S3213,镜头CPU 6808暂停用于平均所检测到的转动半径L的操作,以防止其它可能的由于在快速复原镜的镜上升(或镜下降)操作、增大或减小光圈的孔径或者快门打开/关闭操作等振动发生操作期间施加在ACC 101p上的干扰而可能发生的转动半径L的检测精度的下降。另外,镜头CPU 6808平均在各期间(期间2703和2704(图27))所检测到的转动半径L。
在步骤S3214,镜头CPU 6808判断计算出的转动半径L是否适当。如果判断为计算出的转动半径L适当(步骤S3214为“是”),则处理进入步骤S3215。另一方面,如果判断为计算出的转动半径L不适当(步骤S3214为“否”),则处理进入步骤S3236。
关于以下三点来执行步骤S3214中对于计算出的转动半径L是否适当的判断:
i)平均所检测到的转动半径L的次数是否足够;
ii)计算出的转动半径L是否大于预定值;以及
iii)角速度等于或小于预定水平的状态是否持续了特定长的时间段。
关于点(i),如果由于从在步骤S3201判断为半按下了释放按钮6804a的时刻开始到在步骤S3212判断为完全按下了释放按钮6804a的时刻为止的时间段的长度较短,因而用于计算转动半径L的时间长度不够长,则镜头CPU 6808判断为转动半径L的计算结果不适当。
关于点(ii),如果由于干扰等原因导致检测到的转动半径L超过可预测的上限值(例如,从拍摄镜头的主点到普通拍摄者的腰部的估计距离),则镜头CPU 6808判断为转动半径L的计算结 果不适当。
关于点(iii),如果由于照相机在三脚架上处于稳定状态,因而角速度输出(或通过积分角速度输出计算出的角度输出)小于预定值,则镜头CPU 6808判断为转动半径L的计算结果不适当。这是因为,如果在这种状态下使用表达式(8)计算转动半径L,则由于计算误差可能导致获取了非常大的转动半径L。
如果在步骤S3214判断为计算出的转动半径L不适当(步骤S3214为“否”),则处理进入步骤S3236。在步骤S3236,如果照相机处于上述状态,则镜头CPU 6808使用作为转动半径L的初始值而提供的转动半径。这里,作为初始值而提供的转动半径L是指如图31所示的从照相机的目镜单元到摄像光学系统的主点的距离。
在步骤S3215,如在步骤S3207中一样,镜头CPU 6808判断照相机是否正被摇动。如果判断为照相机正被摇动(步骤S3215为“是”),则处理进入步骤S3217。另一方面,如果判断为照相机没有被摇动(步骤S3215为“否”),则处理进入步骤S3216。
如果在步骤S3215判断为照相机正被摇动,则镜头CPU6808在步骤S3208已暂停了角振动的校正。因此,当前不执行角振动的校正。
在步骤S3217,镜头CPU 6808利用图像传感器6805开始电荷累积操作。然而,由于此时快门没有打开,因而实际被摄体的光束仍未入射到图像传感器6805上。
在步骤S3218,镜头CPU 6808执行快速复原镜的镜上升操作,驱动镜头的光圈,并且打开快门。如上所述,镜头CPU 6808开始累积要在图像传感器6805上形成的被摄体的光束。
在步骤S3219,镜头CPU 6808等待,直到适合曝光的拍摄时间段到来为止。在步骤S3220,镜头CPU 6808在完成曝光之 后暂停平行振动的校正。
在这种情况下,由于因在步骤S3215判断为照相机正被摇动而跳过步骤S3216中的处理(后面详细说明),因而不执行对平行振动校正的暂停(在这种情况下,没有执行平行振动的校正)。在步骤S3221,镜头CPU 6808关闭快门,将镜头的光圈驱动成初始状态,并且执行快速复原镜的镜下降操作。
如上所述,如果在步骤S3215判断为照相机正被摇动,则镜头CPU 6808在不校正角振动或平行振动的情况下执行拍摄控制。
另一方面,如果判断为照相机没有被摇动(步骤S3215为“否”),则处理进入步骤S3216。在步骤S3216,镜头CPU 6808根据在步骤S3213计算出的转动半径L,开始平行振动的校正。在步骤S3217,镜头CPU 6808开始图像传感器6805上的电荷累积,并且重复步骤S3218~步骤S3221的处理。
如上所述,如果在步骤S3215判断为照相机没有被摇动,则判断为在步骤S3204执行了角振动的校正,或者在步骤S3210重新开始了角振动的校正。因此,在曝光期间(在累积来自被摄体的光束期间),镜头CPU 6808执行角振动的校正和平行振动的校正这两者。
在步骤S3222,镜头CPU 6808将通过图像传感器6805所获取的信息显示在设置于照相机背面的液晶显示器(LCD)监视器上,并且将该信息记录在记录介质上。在步骤S3223,镜头CPU6808判断是否释放了释放按钮6804a的完全按下(进行等待,直到释放了释放按钮6804a的完全按下为止)。
如果判断为释放了释放按钮6804a的完全按下(步骤S3223为“是”),则处理进入步骤S3224。在步骤S3224,镜头CPU 6808判断是否释放了释放按钮6804a的半按下。如果判断为没有释放 释放按钮6804a的半按下(步骤S3224为“否”),则处理返回到步骤S3206,在步骤S3206,镜头CPU 6808重复上述步骤S3206和随后步骤中的处理。更具体地,在这种情况下,镜头CPU 6808在等待完全按下释放按钮6804a的同时检测转动半径L,直到释放了释放按钮6804a的半按下为止。在步骤S3225和随后的步骤中,镜头CPU 6808执行上述处理。
下面详细说明用于开始步骤S3204中的角振动的校正和步骤S3216中的平行振动的校正所执行的操作。
图33是示出信号处理系统的例子的框图。下面参考图33详细说明用于向驱动振动校正单元6806的驱动单元6809输入角振动校正目标值和平行振动校正目标值的示例性操作。
在图33所示的例子中,省略了设置在灵敏度调整单元303和输出校正单元309上游的块,其中,灵敏度调整单元303用于输出角振动校正目标值,输出校正单元309用于输出平行振动校正目标值。在图33所示的例子中,尽管通过使用软件进行计算来执行这里要说明的整个操作,但是为了更易于说明和理解,作为模拟块示出样本保持(S/H)单元3302和差动单元3303。
将从灵敏度调整单元303输出的角振动校正目标值输入至可变增益单元3301。当通过半按下释放按钮6804a输入“开关S1接通”信号3304时,可变增益单元(可变增益放大器)3301在0.5秒内将角振动校正目标值的增益从“0”改变成“1”。
因此,在半按下释放按钮6804a 0.5秒之后可以提高角振动的校正精度。在本典型实施例中,如果紧挨在半按下释放按钮6804a之后快速开始图像抖动的校正,则根据手抖动的当前状态逐渐细微地改变增益,以防止由于取景器画面中大的变化而使拍摄者感觉不舒服。下面参考图34详细说明用于改变增益的操作。
另外,为了防止由于图像抖动校正的快速暂停而可能发生的取景器画面的快速变化,在释放按钮6804a的半按下释放之后经过了预定时间段(例如,4秒)之后,可变增益放大器3301在0.5秒内将角振动校正目标值的增益从“1”改变成“0”。
在本典型实施例中,如上所述,在从半按下释放按钮6804a开始经过了预定时间段之后,镜头CPU 6808暂停校正图像抖动,以准备如以上在步骤S3225(图32)中所述,如果再次半按下释放按钮6804a则继续校正图像抖动。
将从输出校正单元309输出的平行振动校正目标值输入至S/H单元3302和差动单元3303。差动单元3303输出S/H单元3302的输出和平行振动校正目标值之间的差动值。
更具体地,由于在采样期间输入至差动单元3303的两个信号相互相等,因而差动单元3303的输出为“0”。还将在完全按下释放按钮6804a时输出的“开关S2接通”信号3305输入至S/H单元3302。当输入“开关S2接通”信号3305时,S/H单元3302采样保持平行振动校正目标值。
因此,在该时间点,S/H单元3302的输出是固定的。此外,在这种情况下,与完全按下释放按钮6804a(输入“开关S2接通”信号3305)同步地,从“0”开始顺序且连续地输出差动单元3303的输出。下面参考图34所示波形详细说明差动单元3303的输出。
此外,还将曝光完成信号3306输入至S/H单元3302。当将曝光完成信号3306输入至S/H单元3302时,S/H单元3302再次采样保持平行振动校正目标值。因此,与曝光完成同步地,差动单元3303的输出变成“0”。
图34利用振动波形示出上述处理。在图34所示的例子中,在水平轴上示出经过的时间。在垂直轴上示出通过转换振动量或振动的校正量而计算出的图像面上的振动量。
在图34所示的例子中,时刻t2、t6、t8、t9、t16、t17与图30所示的相同。
参考图34,波形3401表示由于角振动和平行振动而可能发生的图像面上的振动量,为了更易于理解,以余弦波表示波形3401。波形3402表示波形3401中由于角振动而可能发生的图像面上的振动量的分量。波形3403表示波形3401中由于平行振动而可能发生的图像面上的振动量的分量。
波形3404表示图像面上从可变增益放大器3301(图33)输出的角振动校正目标值的转换值,其中波形3404是用于校正以波形3402所表示的振动的目标值。从波形3404可以看出,本典型实施例在从半按下释放按钮6804a(时刻t2)开始的预定时间(例如,0.5秒)内获取角振动校正目标值的适当增益。
在波形3402上,在时刻t2获取预定振动量3307。如果在这种状态下开始校正图像抖动,则从“0”位置开始快速驱动振动校正单元6806。在这种情况下,取景器画面可能出现大的振动。为了防止这种情况,如波形3404所示,本典型实施例在时刻t2将角振动校正目标值的增益逐渐设置成适当值。
此外,当在时刻t16释放释放按钮6804a的半按下并且自此经过4秒时,即在时刻t17时,本典型实施例逐渐减小角振动校正目标值的增益,以最终使得该增益收敛为“0”。
在波形3402上,在时刻t17获取预定振动量3308。如果快速暂停图像抖动的校正,则振动校正单元6806从校正位置快速驱动至“0”位置。在这种情况下,取景器画面可能出现大的振动。在这点上,本典型实施例通过从时刻t17开始逐渐减小增益来防止画面上的快速变化。
波形3405表示通过转换图像面上从差动单元3303(图33)输出的平行振动校正目标值所获得的值。波形3405是用于校正以 波形3403所表示的振动的目标值。
如上所述,从“0”开始顺序且连续地输出差动单元3303的输出。也就是说,波形3405不同于波形3403上在时刻t6的输出3309。因此,本典型实施例可以防止:在时刻t6如输出3309所示,如果快速开始振动的校正,则在开始曝光之前当振动校正单元6806不能响应时,不能适当地校正平行振动。
如以上参考图33所述,当曝光结束时,镜头CPU 6808使得S/H单元3302再次开始采样保持。在这种情况下,差动单元3303的输出变成“0”。因此,当在时刻t8曝光结束时,平行振动校正目标值的输出变成“0”。
在这点上,尽管振动校正单元6806暂停校正平行振动,但是由于曝光已完成,因而图像不受影响。此外,由于当前正在执行镜上升操作,因而拍摄者通过画面看不出平行振动校正的快速暂停。
为了防止由于画面上的振动而使拍摄者感觉不舒服,如果连续执行图像抖动校正的开始和暂停,这是有用的。在这点上,除当如上所述拍摄者不能看到画面时以外,本典型实施例通过快速暂停平行振动的校正来快速准备下一操作。
在时刻t9,快速复原镜的镜上升操作完成(在时刻t8已关闭快门)。在该时间点,从暂停平行振动的校正开始,已经过了预定时间(例如,100ms)。因此,拍摄者看不出由于暂停平行振动的校正而发生的画面上的振动。
波形3406表示图像面上转换后的振动校正单元6806的驱动量的值。波形3406大体相当于波形3404和波形3405的组合波形。
关于振动校正单元6806的驱动量,在时刻t2逐渐开始角振动的校正。另外,在时刻t6顺序开始角振动的校正和平行振动 的校正。
在时刻t8,镜头CPU 6808暂停校正平行振动。在时刻t9,镜头CPU 6808执行快速复原镜的镜下降操作。在时刻t16,释放释放按钮6804a的半按下。在从时刻t16后经过4秒的时刻t17,镜头CPU 6808开始暂停角振动的校正。
如上所述,镜头CPU 6808执行控制以顺序开始角振动的校正和平行振动的校正。因此,振动校正单元6806可以始终确保执行图像抖动的校正。
如上所述,镜头CPU 6808在步骤S3213暂停用于平均所检测到的振动半径L的操作,以防止其它可能的由于在快速复原镜的镜上升(或镜下降)操作、增大或减小光圈的孔径、或快门打开/关闭操作等振动发生操作期间施加于ACC 101p的干扰而可能发生的转动半径L的检测精度的下降。
图35示出当操作快速复原镜并驱动快门时的ACC 101p的波形的例子。在图35所示的例子中,在水平轴上示出经过的时间。在垂直轴上示出ACC 101p的输出电压。
参考图35,以5V电压驱动ACC 101p。与基准电压3502相比,输出波形3501叠加有偏置电压3505。偏置电压3505表示ACC101p经受1G的重力。
始终对ACC 101p(图31)施加1G的重力,以检测平行振动(或转动半径L)。因此,输出相当于1G重力的加速度输出,作为偏置电压3505。如虚线3504和3503所示,ACC 101p的加速度可输出电压范围为0.5~4.5V。在该范围以外,该输出可能饱和。
关于ACC 101p的波形3501,由于相当于1G重力的偏置电压3505而使ACC 101p的加速度可检测范围变窄。此外,由于快速复原镜、快门或光圈的驱动,向ACC 101p施加大的振动加速 度。因此,在波形段3501a、3501b和3501c中,在驱动镜和快门的时刻,该输出饱和。
通过使用具有宽检测范围的ACC可以解决该问题。然而,如果使用这类ACC,则由于这类ACC的微小加速度的检测精度低,因而不能高精度地检测平行振动加速度。因此,代替使用具有宽检测范围但微小加速度检测精度低的ACC,而在本实施例中,对除驱动快速复原镜、快门或透镜的时间段以外的时间段期间获得的转动半径L进行平均,并且使用这些转动半径L的平均值。相信本实施例能提供比使用具有宽检测范围的ACC的情况高的平行振动的检测精度。
在这点上,本典型实施例使用如下ACC作为ACC 101p:尽管该ACC的检测范围由于当驱动快速复原镜、快门、光圈或透镜时可能发生的加速度输出的可能饱和而受限(即,如上所述,不使用饱和时间段中的加速度输出),但是该ACC能够高精度地检测平行振动。
如以上参考图11所述,转动半径L是指从转动中心1102p到ACC 101p的距离。由于ACC 101p布置在摄像光学系统的主点处,因而该距离相当于从转动中心1102p到摄像光学系统的主点的距离。
由于摄像光学系统的主点的位移,可能发生平行振动。因此,通过将转动半径L乘以通过积分陀螺仪6807p的输出计算出的角度输出,可以计算出摄像光学系统的主点的位移。因此,本典型实施例可以计算出平行振动校正目标值。
同时,尽管以上没有说明,但是透镜在光轴上的位置实际上由于聚焦于被摄体的操作而改变。由于透镜位置在光轴上的改变,摄像光学系统的主点可能从ACC 101p的安装位置移位。因此,为了计算摄像光学系统的主点的位移,根据摄像光学系 统的主点和ACC 101p的安装位置之间的位移,校正转动半径L。
图36和37均示出在上述情况下振动的照相机的状态。在图36和37所示的例子中,镜头和被摄体3601之间的距离不同于镜头和被摄体3701之间的距离。
参考图36,当拍摄者想要拍摄被摄体3601时,在驱动摄像光学系统并将其调整至聚焦位置时,整个摄像光学系统的主点A 3602存在于与ACC 101p在光轴上的位置相同的位置处。因此,镜头CPU 6808根据ACC 101p的输出和陀螺仪6807p的输出计算转动半径L 1101p。此外,镜头CPU 6808通过使用转动半径L 1101p和陀螺仪6807p的输出,利用表达式(4)右边第二项的计算来计算平行振动量3603。
参考图37,与被摄体3601(图36)相比,被摄体3701距离镜头更远。当驱动摄像光学系统并将其调整至聚焦位置时,整个摄像光学系统的主点B 3702从ACC 101p的安装位置移位了位移量3704。因此,在这种情况下,如果要基于ACC 101p的输出和陀螺仪6807p的输出计算转动半径L 1101p,则可能计算不出图37的镜头主点处的平行振动量3703。
在这点上,镜头CPU 6808通过从基于ACC 101p的输出和陀螺仪6807p的输出计算出的转动半径L 1101p中减去位移量3704,来计算修正后的转动半径3705。此外,镜头CPU 6808基于修正后的转动半径L 3705和陀螺仪6807p的输出,通过使用表达式(4)右边第二项的计算,来计算镜头主点B 3702处的平行振动量3703。因此,镜头CPU 6808根据被摄体距离校正转动半径L。
为了计算拍摄镜头的主点处的平行振动,将ACC 101p布置在主点处是有利的。因此,即使拍摄镜头的主点由于调焦操作而改变,如果ACC 101p的安装位置可以改变,则不需要执行上 述校正处理。
在这点上,例如,如果将ACC 101p安装在在调焦期间要向被摄体侧移动的镜头上,则可以使得主点的移动量和ACC的移动量彼此相同。然而,在这种情况下,摄像光学系统的结构可能变得复杂。另外,整个镜头单元的尺寸可能变大。
在这点上,通过执行参考图37所述的校正,当将ACC 101p固定安装在照相机上时,可以计算出可能改变的主点处的平行振动量。可以通过利用调焦编码器检测调焦透镜的位置、基于该检测结果计算摄像光学系统的主点、并且利用ACC 101p的安装位置计算位移,来执行该校正。
输出校正单元309(图3)通过将增益已调整的角度输出乘以转动半径L和摄像倍率,来计算平行振动校正目标值。另外,输出校正单元309还以上述方式校正转动半径L。
图38是示出根据本典型实施例的输出校正单元309的示例性内部结构的框图。参考图38,摄像倍率计算单元309b基于包括在变焦和调焦信息302中的来自镜头编码器的关于镜头变焦位置和镜头调焦位置的信息,计算摄像倍率。
同时,位移计算单元309d基于变焦和调焦信息302,计算摄像光学系统的主点和ACC的安装位置之间的位移。基于来自位移计算单元309d的输出,通过使用转动半径校正单元309c,在输出校正单元309内校正由比较单元308计算出的转动半径L的信息。因此,代替从ACC 101p的安装位置到转动中心的转动半径L,而将转动半径L校正成当前时刻从摄像光学系统的主点到转动中心的转动半径L。
输出校正单元309a将增益调整单元311的输出乘以校正后的转动半径L和摄像倍率,以计算平行振动校正目标值。在执行步骤S3213(图32)中的处理时,校正转动半径L。
在步骤S3213,镜头CPU 6808通过从ACC 101p的安装位置和拍摄条件下的摄像光学系统的主点之间的距离中减去从ACC101p的安装位置到转动中心的转动半径L的平均值,来计算从摄像光学系统的主点到转动中心的校正后的转动半径L。在步骤S3214,镜头CPU 6808判断计算出的校正后的转动半径L是否正确。在步骤S3216,镜头CPU 6808使用校正后的转动半径L来校正平行振动。
利用图38所示的结构,可以自由确定ACC 101p的安装位置,并且可以将ACC 101p安装在与摄像光学系统的主点附近的位置不同的位置处。另外,利用上述结构,即使摄像光学系统的主点发生改变,本典型实施例也可以执行简单校正来校正振动。
此外,具有上述结构的本典型实施例可以通过使用比用于校正振动的带窄的、用于比较陀螺仪和ACC的输出的频带,抑制或至少减少来自叠加在ACC上的重力误差的影响和来自照相机偏移的影响。因此,本典型实施例可以实现具有高移动性和可操作性的小型化图像稳定系统,该系统在利用照相机或摄像机的微距拍摄的情况下稳定工作,并且能够高精度地校正平行振动。
下面说明本发明的第二典型实施例。在上述第一典型实施例中,针对各频率,通过增益调整单元311调整用于校正平行振动的陀螺仪的输出(积分角度输出)的增益,以抑制转动半径L如图20所示那样与振动频率相关而发生的变化的影响。
在这点上,转动半径L不是在所有情况下都如图20所示那样总依赖于频率。例如,如果拍摄者在蹲着时保持照相机,或者如果拍摄者在固定其肘部(例如,固定在桌子上)时执行拍摄,则转动半径L的增益不是如图20所示那样随着频率变低而增大 (转动半径L不变长)。
如果在这种情况下使用增益调整单元311,则低频的平行振动被过校正。结果,在这种情况下,振动量在该频带中可能增大。
在这点上,在本典型实施例中,对于各频率检测转动半径L的变化,并且镜头CPU 6808根据检测结果判断是否要使用增益调整单元311。
图39是示出根据本典型实施例的单镜头反光照相机中所包括的图像稳定控制设备的示例性结构的框图。该照相机的外观与图1和2所示的类似。
除根据第一典型实施例的图像稳定控制设备(图3)的结构以外,根据本典型实施例的图像稳定控制设备还包括陀螺仪6807p的BPF单元、ACC 101p的BPF单元和用于判断针对各频率是否调整转动半径L的单元,以识别各频率的转动半径L的变化趋势。另外,根据本典型实施例的图像稳定控制设备包括输入切换单元。该输入切换单元用于在判断针对各频率是否要调整转动半径L之后,控制对各频率的转动半径L的调整的执行。
参考图39,与陀螺仪BPF单元306(图3)一样,陀螺仪BPF 1单元3901是用于提取5Hz频率下的角速度输出的滤波器。与ACC BPF单元307(图3)一样,ACC BPF 1单元3902是用于提取5Hz频率下的速度输出的滤波器。
比较单元3905基于该角速度输出和速度输出,计算5Hz下的转动半径L。陀螺仪BPF 2单元3903是用于提取1Hz下的角速度输出的滤波器。ACC BPF 2单元3904是用于提取1Hz下的速度输出的滤波器。
比较单元3906基于该角速度输出和速度输出,计算1Hz下的转动半径L。调整可用性判断单元3907对比较单元3905和比 较单元3906的输出进行比较。
如以上在第一典型实施例中所述,通常,高频的转动半径L小于低频的转动半径L。因此,如果作为比较单元3905的输出的5Hz下的转动半径L小于作为比较单元3906的输出的1Hz下的转动半径L,则调整可用性判断单元3907判断为照相机处于以上第一典型实施例中所述的状态。
在这种情况下,调整可用性判断单元3907将该结果输出至输入切换单元3908。输入切换单元3908将增益调整单元311的输出输出至输出校正单元309。以上述方式,调整可用性判断单元3907生成与逐频率改变的转动半径L相当的平行振动校正目标值。
如果作为比较单元3906的输出的1Hz下的转动半径L和作为比较单元3905的输出的5Hz下的转动半径L相同,或者如果5Hz下的转动半径L大于1Hz下的转动半径L,则调整可用性判断单元3907判断为照相机处于与以上第一典型实施例中所述的状态不同的状态。
调整可用性判断单元3907将该结果输出至输入切换单元3908。输入切换单元3908将HPF积分滤波器301的输出输出至输出校正单元309。更具体地,调整可用性判断单元3907生成绕开增益调整单元311的平行振动校正目标值。
如以上参考图22所述,HPF积分滤波器310的输出具有与普通HPF积分滤波器301的特性不同的特性,以校正增益调整单元311的特性。因此,本典型实施例不使用HPF积分滤波器310的输出。利用上述结构,本典型实施例可以根据拍摄者的拍摄状况,最佳地校正平行振动。
在第一典型实施例中,镜头CPU 6808通过使用在开始拍摄之前计算出的转动半径L的平均值,计算平行振动校正目标值。 然而,在这点上,如果在观察被摄体的时间长的情况下,用于计算转动半径L的时间段也长,则在紧挨着开始拍摄之前的时刻的振动状态可能变得不同于开始被摄体观察时的振动状态。
在这点上,例如,转动半径L的大小本身可能由于保持照相机的方式的改变而改变。另外,在紧挨着开始拍摄之前的时刻频率和转动半径L之间的关系可能变得不同于开始被摄体观察时它们之间的关系。
考虑到这些情况,如果代替使用在紧挨着拍摄之前的时刻计算出的转动半径L的平均值,而针对各预定时间段更新转动半径L的平均值,这是有用的。
在图27所示的例子中,镜头CPU 6808将速度输出V 2717~2723分别与各自在预定期间检测到的角速度输出ω2710~2716进行比较。此外,镜头CPU 6808通过计算各时间段的角速度输出ω和速度输出V,计算转动半径L。
在图28所示的例子中,镜头CPU 6808将速度峰值输出V2807~2809分别与各自在预定期间检测到的角速度峰值输出ω2804~2806进行比较。此外,镜头CPU 6808通过计算各时间段的角速度输出ω和速度输出V,计算转动半径L。另外,在第一典型实施例中,镜头CPU 6808在步骤S3213(图32)计算转动半径L的平均值,并且使用该平均值以校正拍摄期间可能发生的平行振动。
在本典型实施例中,镜头CPU 6808使用移动平均法作为用于计算转动半径L的平均值的方法。本典型实施例依次更新该平均值。
图40是示出根据上述结构的操作的例子的时序图。在图40所示的例子中,在水平轴上示出经过的时间,而在垂直轴上示出时序。
参考图40,在拍摄者以时序4001半按下释放按钮6804a之后(开关S1处于“接通”状态),则镜头CPU 6808以时序4003开始检测转动半径L。转动半径L01~L22各自表示要针对各时间段计算的转动半径L。
在第一典型实施例中,镜头CPU 6808通过平均在拍摄者以时序4002完全按下释放按钮6804a(开关S2处于“接通”状态)之前的时间段期间所检测到的所有转动半径L01~L19,来计算用于校正平行振动的转动半径L。在这点上,本典型实施例针对各预定时间段更新转动半径L。
如图40所示,当计算出转动半径L01~L10时,则镜头CPU6808计算转动半径L01~L10的平均转动半径L0110。然后,每当计算出转动半径L时,镜头CPU 6808就计算转动半径L的移动平均。因此,本典型实施例更新用于校正平行振动的转动半径。
在图40所示的例子中,当计算出转动半径L19时,开始拍摄。因此,在计算出转动半径L19时,镜头CPU 6808通过使用移动平均值L 1019来校正平行振动。更具体地,镜头CPU 6808继续更新转动半径L的移动平均值。当开始拍摄时,镜头CPU6808通过使用最新的移动平均值来校正平行振动。
如以上参考图39所述,关于转动半径L 1019,镜头CPU 6808计算两种类型的转动半径L,即,5Hz下的转动半径L和1Hz下的转动半径L。镜头CPU 6808根据比较结果判断针对各频率是否调整转动半径L。
通过以上述方式更新转动半径L,本典型实施例可以通过使用适合于当前拍摄条件的转动半径L,高精度地校正平行振动。如果采用以上参考图29所述的使用面积的方法,则采用下面的结构是有用的。更具体地,在这种情况下,镜头CPU 6808通过图40所示的移动平均法,继续更新针对各期间计算出的转 动半径L。当开始拍摄时,镜头CPU 6808通过使用最新的移动平均值来校正平行振动。
如果通过使用移动平均法计算转动半径L,则用于进行平均的时间段变得短于第一典型实施例中的时间段。因此,如果在源自照相机或透镜的驱动的振动期间没有计算转动半径L,则在由于照相机或透镜的驱动而引起的振动已经发生之后立即开始拍摄时,不能适当地校正该振动。
在这点上,在本典型实施例中,当驱动AF用透镜时,计算转动半径L。然而,如以上在第一典型实施例中所述,如果由于源自驱动的振动而导致ACC 101p或ACC 101y的输出饱和,则不能准确地计算转动半径L。
在本典型实施例中,将ACC 101p的灵敏度降低到不发生饱和的水平。然后,镜头CPU 6808在这种状态下检测振动加速度,并且将所检测到的振动加速度与角速度输出进行比较。
然而,如果降低加速度灵敏度,则加速度检测输出可能劣化。在这点上,本典型实施例仅在发生源自驱动的振动时降低ACC 101p的灵敏度。
在本典型实施例中,在正常工作状态下,可以高精度地检测振动加速度。镜头CPU 6808仅在发生源自驱动的振动的短时间段期间降低角速度灵敏度。因此,尽管驱动振动发生时间段期间的振动加速度的检测精度可能下降时,但是可以利用驱动振动前后的转动半径L的移动平均来降低精度的下降。
图41是示出图39所示的结构中用于控制ACC 101p的灵敏度的附加块的框图。在图41所示的例子中,ACC 101p包括机械部分101pc,该机械部分101pc包括微电子机械系统(MEMS)、第一级放大器101pd和处理电路101pe。
当从增益改变判断单元4101输入信号时,第一级放大器 101pd的增益是可变的。通过窗口比较器4103将ACC 101p的输出输入至HPF积分滤波器305。通过增益校正单元4104将HPF积分滤波器305的输出输入至ACC BPF 1单元3902和ACC BPF 2单元3904。
还将窗口比较器4103的输出输入至增益改变判断单元4101。当ACC 101p的输出超出第一范围的水平时,窗口比较器4103输出增益减小信号。在接收到增益减小信号之后,增益改变判断单元4101减小第一级放大器101pd的增益。将第一范围设置成ACC的输出饱和水平的约80%的水平。
如果ACC的输出在预定时间长度(例如,0.1秒)内处于第二范围的水平中,则窗口比较器4103输出增益恢复信号。在接收到增益恢复信号之后,增益改变判断单元4101使第一级放大器101pd的增益恢复成它的原始值。由于在改变增益之后第一级放大器101pd的增益被减小为三分之一,并且由此,镜头CPU 6808在这种状态下使用与第一范围的水平相同的水平,因而将第二范围设置成第一范围的三分之一的水平。
将来自调整可用性判断单元3907的转动半径L计算未完成信号输入至增益恢复禁止单元4102。在该期间,增益恢复禁止单元4102向增益改变判断单元4101输出增益恢复禁止信号。
因此,在比较单元3905和3906计算转动半径L的时间段期间,不将第一级放大器101pd的增益恢复成它的原始值,以防止当在转动半径L的计算期间改变第一级放大器101pd的增益时可能发生的转动半径L的检测精度的可能下降。
如果第一级放大器101pd的增益小,则增益校正单元4104将增益恢复成原始值。在本典型实施例中,将增益校正单元4104设置在HPF积分滤波器305的后级。
当发生源自驱动的振动时,在ACC 101p的输出上叠加高频 噪声。因此,在这种情况下,ACC 101p的输出可能饱和。然而,由于通过积分ACC输出来计算HPF积分滤波器305的输出,因而可以充分衰减高频信号。
因此,即使增大设置在HPF积分滤波器305下游的各单元的输出增益,该输出也不饱和。更具体地,本典型实施例通过减小第一级放大器101pd的增益以防止ACC 101p的输出饱和,并且由此在积分ACC 101p的输出之后校正该增益,来校正由于第一级放大器101pd的增益改变而发生的转动半径L的误差。
图42以ACC的输出波形示出根据本典型实施例的上述结构。在图42所示的例子中,在水平轴上示出经过的时间,而在垂直轴上示出ACC输出。
参考图42,波形4201和4203表示当第一级放大器101pd的增益正常时的ACC 101p(在期间4204和4206)的输出。波形4202表示当将第一级放大器101pd的增益减小为三分之一时的ACC101p(在期间4205)的输出。
在图42所示的例子中,关于波形4201,当输入以箭头4209表示的冲击时,该冲击的输出超过了判断水平(第一范围)4207。因此,窗口比较器4103输出增益减小信号,以减小第一级放大器101pd的增益,并获得波形4202。
当输入以箭头4210表示的另一冲击时,波形4202没有超过判断水平(第二范围)4208。此时,已将第一级放大器101pd的增益减小为三分之一。因此,镜头CPU 6808将作为第二范围的判断水平设置成相当于第一范围判断水平的三分之一的水平,以在相同水平执行判断。
如上所述,在波形4202落在第二范围判断水平4208内后经过了预定时间段(确认时间4211)之后,镜头CPU 6808执行用于将第一级放大器101pd的增益恢复成它的原始值的控制。
然而,关于确认时间段4211,考虑计时预定时间段(例如,0.1秒)以及用于计算转动半径L的时间段之间的分隔。更具体地,如果从预定时间段(例如,0.1秒)起经过0.04秒之后,获取转动半径L的计算结果,则确认时间段4211为0.14秒。镜头CPU6808在将第一级放大器101pd的增益恢复成它的原始值之后计算下一转动半径L。
图43是示出用于改变(切换)ACC 101p的增益和第一级放大器101pd的增益的示例性操作的流程图。当启动ACC时,该流程开始,并且作为循环重复执行该流程,直到停止ACC的操作为止。
参考图43,在步骤S4301,窗口比较器4103判断ACC输出是否超出第一范围4207。如果判断为ACC输出超出了第一范围4207(步骤S4301为“是”),则处理进入步骤S4302。另一方面,如果判断为ACC输出没有超出第一范围4207(步骤S4301为“否”),则镜头CPU 6808重复步骤S4301中的处理,并且进行等待,直到ACC输出变成超出第一范围4207为止。
在步骤S4302,增益改变判断单元4101将第一级放大器101pd的增益减小成当前水平的三分之一。此外,增益校正单元4104通过将加速度输出增大三倍来校正该增益。
在步骤S4303,窗口比较器4103判断ACC输出是否已恢复成第二范围判断水平4208内的水平。如果判断为ACC输出已恢复成第二范围判断水平4208内的水平(步骤S4303为“是”),则处理进入步骤S4304。另一方面,如果判断为ACC输出没有恢复成第二范围判断水平4208内的水平(步骤S4303为“否”),则处理重复步骤S4303中的处理,以等待直到第一级放大器101pd的增益恢复成第二范围判断水平4208内的水平为止。
在步骤S4304,镜头CPU 6808等待预定时间长度(例如,0.1 秒)。在步骤S4305,镜头CPU 6808等待,直到完成当前时间段中的转动半径L的计算为止。
在步骤S4306,增益改变判断单元4101将第一级放大器101pd的增益恢复成它的原始值。此外,增益校正单元4104将积分后的加速度输出恢复成一倍。然后,处理返回到步骤S4301。
如上所述,镜头CPU 6808在ACC 101p的输出变成饱和之前就减小增益。因此,本典型实施例避免了ACC 101p的饱和,并且利用积分后的加速度输出校正增益的不足。因此,可以防止校正值的饱和。
图44是示出根据本发明第二典型实施例的主要组件的示例性操作的流程图。图44的流程图中的处理大体上与第一典型实施例中的图32中所示的处理相同。
图44的流程图中的处理在下面的点上不同于图32所示的处理。更具体地,在本典型实施例中,镜头CPU 6808计算计算出的转动半径的移动平均,以及代替在步骤S3206和S3228中执行转动半径L的计算,而是在步骤S4401和S4403中检测转动半径。另外,在本典型实施例中,省略步骤S3230中的暂停检测转动半径。这是因为,在减小了ACC 101p的第一级放大器101pd的增益之后,不会发生由于源自调焦用透镜的驱动的振动而可能另外发生的ACC输出的饱和,因此在该时间段期间可以计算转动半径L。
图45是根据本典型实施例的时序图。图45所示的时序图大体上与第一典型实施例的图30所示的时序图相同。除在图45所示的示例性时序图中代替转动半径检测时序3009而设置转动半径检测时序4501以外,图45所示的时序图大体上与图30所示的时序图相同。
在转动半径检测时序4501,镜头CPU 6808基于来自陀螺仪 和ACC的输出,计算转动半径。“Hi”状态表示计算转动半径,而“Lo”状态表示暂停转动半径的计算。转动半径检测时序4501与转动半径检测时序3009的不同在于:在本典型实施例中,即使在时刻t3~时刻t5的时间段期间,镜头CPU 6808也计算转动半径L。
返回图44,图44的流程图所示的处理在下面的点上不同于图32所示的处理。更具体地,在本典型实施例中,代替在步骤S3213中暂停转动半径的检测并平均转动半径,而在步骤S4402,镜头CPU 6808暂停转动半径的检测,并且使用最新更新后的转动半径来校正平行振动。其它处理与以上图32中所述的相同。因此,这里不再重复对其的说明。
从图44所示的流程可以看出,与镜头CPU 6808在第一典型实施例中的动作一样,在驱动快门、快速复原镜或光圈的同时,镜头CPU 6808暂停转动半径L的检测。这里注意,在用于驱动快门、快速复原镜或光圈的时间段中,可以执行转动半径L的检测。
然而,如果在上述时间段期间继续进行转动半径L的检测,则照相机受到由于驱动而发生的十分大的振动。在这种情况下,减小ACC 101p的第一级放大器101pd的增益,以防止由于驱动振动而可能发生的ACC输出的饱和。因此,在这种情况下,ACC输出可能由于大的增益减小而变得不稳定。因此,上述时间段期间计算出的转动半径的检测精度变得极低。因此,镜头CPU6808暂停转动半径L的检测。
如以上参考图38所述,镜头CPU 6808基于与ACC 101p的安装位置有关的信息和摄像光学系统的主点的位移,校正转动半径L。然而,如果将ACC 101p布置在与设置最大摄像倍率时的摄像光学系统的主点相同的位置处,并且如果当前摄像倍率低 于最大摄像倍率,则可以减小或抑制源自平行振动的影响。
因此,在这种情况下,可以无需校正转动半径L而以充分高的精度校正平行振动。因此,可以简化整个系统。
在图46所示的例子中,将ACC 101p布置在与摄像倍率为拍摄镜头能力范围内最高的状态(最接近被摄体距离位置4601)下的摄像光学系统的主点A 4602相同的位置处。因此,基于ACC101p的输出和陀螺仪6807p的输出计算出的转动半径L 1101p等于从转动中心到摄像光学系统的主点的转动半径。因此,可以利用该结构高精度地校正平行振动。摄像光学系统的主点A4602处的振动量4603等于ACC 101p的安装位置处的振动量4603。
图47示出被摄体4701远离摄像光学系统的情况。在这种情况下,在聚焦于被摄体4701时的摄像光学系统的主点B 4702从ACC 101p的安装位置4602发生移位。
摄像光学系统的主点B 4702处的振动量4703不同于ACC101p的安装位置处的振动量4603。然而,在这种情况下,摄像倍率低。因此,源自可能导致图像劣化的平行振动的影响小。因此,可以在不严格设置转动半径L的情况下,以可容忍的高精度校正平行振动。
将ACC 101p布置在与摄像光学系统的摄像倍率变成最大时镜头的主点相同的位置处是有意义的。如果可以将ACC 101p布置在与镜头的主点相同的位置处,则与上述第一典型实施例中的计算相比,本典型实施例中的计算可以更加简化。
下面说明本发明的第三典型实施例。图48示出根据本典型实施例的单镜头反光照相机中所包括的图像稳定控制设备的示例性结构。该照相机的外观与图1和2所示的第一和第二典型实施例中的相同。
本典型实施例在下面的点上不同于上述第一和第二典型实施例。
-代替以上参考图41所述的窗口比较器4103的判断结果,而基于照相机致动器驱动定时信号,改变ACC 101p的第一级放大器101pd的增益。
-代替以上参考图3所述的通过调整陀螺仪6807p的积分信号的增益对各频率优化转动半径L,而通过使用多个频率水平中的最佳转动半径L,来执行平行振动的校正。
因此,本典型实施例的结构(图48)在下面的点上不同于以上参考图41所述的结构。
1)根据本典型实施例的结构还包括在上述框图中未示出的透镜驱动指示单元4801、透镜驱动单元4802和透镜驱动机构4803。
2)在本典型实施例的结构中,包括陀螺仪BPF 3单元4804、ACC BPF 3单元4805、比较单元4806和转动半径选择单元4807。
3)在本典型实施例的结构中,省略了HPF积分滤波器310、增益调整单元311和输入切换单元3908。
在这点上,首先,下面详细说明根据本典型实施例的ACC101p的增益的切换(改变)。在上述第二典型实施例中,根据ACC输出的大小本身,改变第一级放大器101pd的增益。在本典型实施例中,根据调焦用透镜驱动指示信号,改变第一级放大器101pd的增益。
参考图48,将与释放按钮6804a的操作有关的信息和透镜驱动信号输入至镜头CPU 6808。在接收到该信息和该信号之后,透镜驱动指示单元4801驱动调焦用透镜(调焦透镜)。更具体地,透镜驱动指示单元4801向透镜驱动单元4802输出透镜驱动指示信号。透镜驱动单元4802基于透镜驱动指示信号驱动透镜驱动 机构4803,以移动调焦用透镜。
还将来自透镜驱动指示单元4801的透镜驱动指示信号输入至增益改变判断单元4101。增益改变判断单元4101基于透镜驱动指示信号,改变第一级放大器101pd的增益。更具体地,当输入透镜驱动指示时,增益改变判断单元4101减小所指示的时间段内第一级放大器101pd的增益。此外,在减小第一级放大器101pd的增益的时间段期间,增益改变判断单元4101增大增益校正单元4104的增益。因此,增益改变判断单元4101防止整个增益的变化。
图49以ACC 101p的波形示出上述操作。在图49所示的例子中,在水平轴上示出经过的时间。在垂直轴上示出ACC输出。
波形4201和4203表示当第一级放大器101pd的增益正常时ACC 101p在时间段4204和4206期间的输出。波形4202表示在将第一级放大器的增益减小为原始水平的三分之一时ACC 101p在时间段4205中的输出。
关于波形4201,在图49中以箭头4901表示的、来自透镜驱动指示单元4801的用于驱动透镜的指示开始的时刻,减小第一级放大器101pd的增益。因此,获得波形4202。
然后,在以箭头4902表示的透镜驱动指示暂停的时刻,源自透镜驱动的振动的发生结束。可以在该时刻将第一级放大器101pd的增益恢复成它的原始值。然而,在本典型实施例中,在等待以箭头4903表示的用于计算转动半径L的时刻的分隔之后,将第一级放大器101pd的增益恢复成它的原始值。增益恢复禁止单元4102如以上参考图42所述那样工作。
在从转动半径选择单元4807输入转动半径选择信号之前,增益恢复禁止单元4102禁止增益改变判断单元4101将增益恢复成它的原始值。在将第一级放大器101pd的增益恢复成原始值之 后,镜头CPU 6808计算下一转动半径L。
如果如上所述利用透镜驱动时刻,则考虑驱动指示时刻和发生源自实际驱动的振动的时刻之间的位移来设置用于减小增益的长的时间段,这是有利的。在这种情况下,尽管减小了实际驱动透镜之前的驱动指示时刻的增益,但是可以确保获取到用于将增益恢复成它的原始值的时刻。
在上述第二典型实施例中,如果由ACC 101p检测到的输出在预定时间段内减小,则镜头CPU 6808将增益恢复成它的原始值,从而当在照相机受到连续冲击的时间段期间没有瞬时冲击时,不将增益恢复成它的原始值。
在本典型实施例中,镜头CPU 6808检测驱动指示时刻。因此,由于输入了驱动结束时刻,因而镜头CPU 6808可以识别出在输入驱动结束时刻之后没有向照相机施加大的振动。因此,在本典型实施例中,不需要对ACC输出监视预定时间段和基于ACC输出的监视结果将增益恢复成它的原始值。
此外,下面详细说明用于通过使用多个频率水平的转动半径L中的最佳转动半径L校正平行振动的方法。
在本典型实施例中,如图48所示,使用三对BPF来计算转动半径L。陀螺仪BPF 1单元3901提取2Hz下的角速度信号(HPF相位调整单元304的输出)。ACC BPF 1单元3902提取2Hz下的ACC信号(增益校正单元4104的输出)。与第一典型实施例中一样,比较单元3905比较该角速度信号和ACC信号以计算转动半径L。
类似地,陀螺仪BPF 2单元3903提取5Hz下的角速度信号(HPF相位调整单元304的输出),而ACC BPF 2单元3904提取5Hz下的ACC信号(增益校正单元4104的输出)。与第一典型实施例中一样,比较单元3906比较该角速度信号和ACC信号以计算 转动半径L。
陀螺仪BPF 3单元4804提取8Hz下的角速度信号(HPF相位调整单元304的输出),而ACC BPF 3单元4805提取8Hz下的ACC信号(增益校正单元4104的输出)。与第一典型实施例中一样,比较单元4806比较该角速度信号和ACC信号以计算转动半径L。
转动半径选择单元4807从由比较单元3905、3906和4806所计算出的转动半径L中选择最佳转动半径,并将所选择的最佳转动半径L输出至输出校正单元309。因此,本典型实施例可以通过使用提取频率水平(2Hz、5Hz或8Hz)中由转动半径选择单元4807所选择的频率下的转动半径L(转动半径选择单元4807的输出),来校正平行振动。
在本典型实施例中,不使用图3所示的增益调整单元311。因此,在本典型实施例中,不需要用于校正增益调整单元311的相移的HPF积分滤波器310。因此,本典型实施例基于HPF积分滤波器301的输出,计算角振动校正目标值和平行振动校正目标值。
下面详细说明用于利用转动半径选择单元4807计算最佳转动半径L的方法。
图50示出根据本典型实施例的图像稳定控制设备中的振动的示例性波形。参考图50,波形5001表示ACC BPF 1单元3902的输出。波形5008是通过将陀螺仪BPF 1单元3901的输出乘以由比较单元3905计算出的转动半径L所获得的信号波形。波形5008表示基于陀螺仪6807p的输出计算出的速度。波形5008的大小与波形5001的大小相同。波形5001和5008之间的位置关系可以相互偏移。
如果将转动中心固定在一个位置,则波形5001和5008在位 置上匹配。然而,如果存在多个转动中心,并且ACC 101p检测到了源自多个转动中心的组合振动,则在特定时刻,针对角速度信号的相位在各转动中心可能根据振动的大小而改变。因此,在这种情况下,可能发生波形5001和5008之间的位置偏移。
在这点上,如果通过使用如下频率下的转动半径L校正平行振动,则平行振动的校正精度可以变得非常高,其中在该频率,ACC BPF 1单元3902的输出波形和通过将陀螺仪BPF 1单元3901的输出乘以转动半径L所获得的输出波形相互匹配,并且在该频率,ACC BPF 1单元3902的输出相位和通过将陀螺仪BPF1单元3901的输出乘以转动半径L所计算出的输出相位也相互匹配。
在这点上,转动半径选择单元4807计算作为波形5001和5008之间的差的波形5009,以判断这两个波形5001和5008之间的匹配状况(匹配程度)。转动半径选择单元4807周期性对波形5001和5009执行采样,并且比较采样的结果。
在图50所示的例子中,箭头5002~5004均表示采样周期。箭头5005~5007和5010~5012均表示采样周期期间波形5001和5009的最大振幅(最大值和最小值之间的差)。
本典型实施例将提取频率的周期设置为采样周期。在这点上,如果将提取频率设置成2Hz,则采样周期为0.5秒。
镜头CPU 6808平均以上述方式计算出的各周期的波形5001和5009的最大振幅,以防止由于可能的突然改变而可能发生的最大振幅的判断精度的下降。
与开始检测转动半径L同步地,转动半径选择单元4807开始计算波形5001和5009的最大振幅,并且计算最大振幅的平均值,直到马上开始拍摄之前为止。此外,镜头CPU 6808计算该平均值的比以计算匹配状况判断值,该匹配状况判断值将用于 判断波形5001和5008的匹配程度。
随着匹配状况判断值减小,波形5001和5008之间的匹配程度变高。关于波形5001和5009的最大振幅的平均值,如果代替使用从开始检测转动半径到开始拍摄的时间段期间的最大振幅的平均值,而使用以上参考图2所述的针对各预定时间段更新移动平均的方法,这也是有用的。在这种情况下,镜头CPU 6808可以通过使用紧挨着开始拍摄之前的时间段的最新更新后的值,计算匹配状况判断值。
图51示出根据本典型实施例的图像稳定控制设备中的振动的示例性波形。参考图51,波形5101表示ACC BPF 2单元3904的输出。波形5108是通过将ACC BPF 2单元3904的输出乘以由比较单元3906计算出的转动半径L所获得的信号波形。
在这点上,转动半径选择单元4807计算作为波形5101和5108之间的差的波形5109,以判断这两个波形5101和5108之间的匹配状况(匹配程度)。转动半径选择单元4807周期性地对波形5101和5109执行采样,并且比较采样的结果。
在图51所示的例子中,箭头5102~5104均表示采样周期。箭头5105~5107和5110~5112均表示采样周期期间波形5101和5109的最大振幅(最大值和最小值之间的差)。
关于采样周期,使用与以上参考图50所述的采样周期相同的采样周期。因此,在参考图51所述的方法中,可以使用由以上参考图50所述的方法计算出的匹配状况判断值相同的计算条件。镜头CPU 6808平均以上述方式计算出的各频率的波形5101和5109的最大振幅。
与开始检测转动半径L同步地,转动半径选择单元4807开始计算波形5101和5109的最大振幅,并且计算最大振幅的平均值,直到马上开始拍摄之前为止。此外,镜头CPU 6808计算该 平均值的比以计算匹配状况判断值,该匹配状况判断值将用于判断波形5101和5108的匹配程度。
图52示出根据本典型实施例的图像稳定控制设备中的振动的示例性波形。参考图52,波形5201表示ACC BPF 3单元4805的输出。波形5208是通过将陀螺仪BPF 3单元4804的输出乘以由比较单元4806计算出的转动半径L所计算出的信号波形。
在这点上,转动半径选择单元4807计算作为波形5201和5208之间的差的波形5209,以判断这两个波形5201和5208之间的匹配状况(匹配程度)。转动半径选择单元4807周期性对波形5201和5209执行采样,并且比较采样的结果。
在图52所示的例子中,箭头5202~5204均表示采样周期。箭头5205~5207和5210~5212均表示采样周期期间波形5201和5209的最大振幅(最大值和最小值之间的差)。
关于采样周期,使用与以上参考图50所述的采样周期相同的采样周期。因此,在参考图52所述的方法中,可以使用由以上参考图50所述的方法计算出的匹配状况判断值相同的计算条件。镜头CPU 6808平均以上述方式计算出的各频率的波形5201和5209的最大振幅。
与开始检测转动半径L同步地,转动半径选择单元4807开始计算波形5201和5209的最大振幅,并且计算最大振幅的平均值,直到马上开始拍摄之前为止。此外,镜头CPU 6808计算该平均值的比以计算匹配状况判断值,该匹配状况判断值将用于判断波形5201和5208的匹配程度。
如上所述,转动半径选择单元4807计算各频率水平2Hz、5Hz和8Hz下的匹配状况判断值。此外,转动半径选择单元4807将匹配状况判断值变得最低(波形的匹配程度变得最高)的频率下的转动半径L输出至输出校正单元309。
输出校正单元309通过将陀螺仪6807p的HPF积分滤波器301的输出(振动角度)乘以输入的转动半径L和基于变焦和调焦信息302计算出的摄像倍率,计算平行振动校正目标值。
驱动单元6809在半按下释放按钮6804a的时间段期间,基于来自灵敏度调整单元303的角振动校正目标值,驱动振动校正单元6806以校正角振动。
当完全按下释放按钮6804a时(在曝光时间段期间),驱动单元6809基于角振动校正目标值和来自输出校正单元309的平行振动校正目标值,驱动振动校正单元6806。
利用上述结构,本典型实施例可以计算出所有计算出的转动半径L中校正平行振动的效果最好的转动半径L。因此,本典型实施例可以高精度地校正平行振动。
在图48所示的例子中,使用多个BPF。然而,本典型实施例不局限于此。例如,如以上参考图26所述,如果使用傅立叶变换来计算各频率下的转动半径L,并且选择频率水平中适当频率下的最佳转动半径L,这也是有用的。
在这种情况下,如以上参考图50~52所述,镜头CPU 6808可以根据速度和通过将角速度乘以转动半径L所计算出的值之间的差,来计算匹配状况判断值。可选地,如果镜头CPU 6808选择所有转动半径L中相对通过傅立叶变换计算出的各频率下的速度(角速度×转动半径)相位的偏移为最小的频率下的转动半径L,这也是有用的。
图53示出根据本典型实施例的情况下所使用的示例性结构。
图53所示的结构在下面的点上不同于图48所示的结构。也就是说,代替图48所示的组件,即陀螺仪BPF 1单元3901、ACCBPF 1单元3902、陀螺仪BPF 2单元3903、ACC BPF 2单元3904、 陀螺仪BPF 3单元4804和ACC BPF 3单元4805,图53所示的结构包括陀螺仪傅立叶变换1单元5301、ACC傅立叶变换1单元5302、陀螺仪傅立叶变换2单元5303、ACC傅立叶变换2单元5304、陀螺仪傅立叶变换3单元5305和ACC傅立叶变换3单元5306。
可以通过上述表达式(9)和(10)计算由各傅立叶变换单元计算出的各频率下的角速度和速度的谱。转动半径选择单元4807通过使用下面的表达式(17)和(18)计算各频率下的速度的相位和角速度的相位:


在仅存在一个转动中心的理想情况下,通过表达式(17)计算出的速度的相位和通过表达式(18)计算出的角速度的相位应该相互匹配。然而,如果存在多个转动中心,并且ACC检测到了源自转动中心的组合振动,则针对角速度信号的相位可能由于特定时刻各转动中心的大小而改变。
在本典型实施例中,转动半径选择单元4807通过使用表达式(17)和(18)(用于计算速度和角速度的表达式),计算通过表达式(17)和(18)的计算得出的相位之间的差。此外,转动半径选择单元4807将通过表达式(17)和(18)的计算得出的相位之间的差最小的频率下的转动半径L输出至输出校正单元309。
输出校正单元309通过将陀螺仪6807p的HPF积分滤波器 301的输出(振动角度)乘以输入的转动半径L和基于变焦和调焦信息302计算出的摄像倍率,计算平行振动校正目标值。
驱动单元6809在半按下释放按钮6804a的时间段期间,基于来自灵敏度调整单元303的角振动校正目标值,驱动振动校正单元6806以校正角振动。
当完全按下释放按钮6804a时(在曝光时间段期间),驱动单元6809基于角振动校正目标值和来自输出校正单元309的平行振动校正目标值,驱动振动校正单元6806。
利用上述结构,本典型实施例可以计算所有计算出的转动半径L中校正平行振动的效果最好的转动半径L。因此,本典型实施例可以高精度地校正平行振动。
下面说明本发明的第四典型实施例。图54示出根据本典型实施例的单镜头反光照相机中所包括的图像稳定控制设备的示例性结构。
本典型实施例在下面的点上不同于上述第三典型实施例。
-基于以上参考图41所述的窗口比较器4103的判断结果,减小ACC 101p的第一级放大器101pd的增益,但是基于照相机致动器驱动定时信号,切换是否将缩小后的增益恢复成它的原始值。
-转动半径L用作多个频率水平的转动半径L的平均值。
因此,本典型实施例的结构(图54)在下面的点不同于以上参考图48所述的结构。
1)根据本典型实施例的结构包括窗口比较器4103。
2)代替转动半径选择单元4807,而包括转动半径平均单元5401。
首先,下面详细说明用于改变ACC 101p的增益的方法。在上述第三典型实施例中,基于调焦用透镜驱动指示信号,执行 第一级放大器101pd的增益的减小和恢复。在这点上,在本典型实施例中,与在第二典型实施例中一样,镜头CPU 6808根据ACC 101p输出的大小,减小第一级放大器101pd的增益。此外,在本典型实施例中,与在第三典型实施例中一样,镜头CPU6808根据调焦用透镜驱动指示信号,将增益恢复成它的原始值。
图55以ACC 101p的波形示出上述处理。在图55所示的例子中,在水平轴上示出经过的时间。在垂直轴上示出ACC输出。
波形4201和4203表示在第一级放大器101pd的增益正常时ACC 101p在时间段4204和4206期间的输出。波形4202表示在将第一级放大器的增益减小为原始水平的三分之一时ACC 101p在时间段4205期间的输出。
在图55所示的例子中,关于波形4201,当输入以箭头4209表示的冲击时,该冲击的输出超过了判断水平(第一范围)4207。因此,窗口比较器4103输出增益减小信号,以减小第一级放大器101pd的增益,并获得波形4202。
然后,在以箭头4902表示的透镜驱动指示暂停的时刻,源自透镜驱动的振动的发生结束。可以在该时刻将第一级放大器101pd的增益恢复成它的原始值。然而,在本典型实施例中,在等待以箭头4903表示的用于计算转动半径L的时刻的分离之后,将第一级放大器101pd的增益恢复成它的原始值。增益恢复禁止单元4102如以上参考图42所述那样工作。
在从转动半径平均单元5401输入转动半径平均信号之前,增益恢复禁止单元4102禁止增益改变判断单元4101将增益恢复成它的原始值。镜头CPU 6808在将第一级放大器101pd的增益恢复成原始值之后,计算下一转动半径L。
通过在减小增益时利用ACC的输出,本典型实施例可以仅在有用时才减小第一级放大器101pd的增益。
关于将增益恢复成它的原始值的时刻,本典型实施例利用不驱动致动器的可靠时刻,来代替如以上在第二典型实施例中所述的那样在ACC输出减小之后,通过观察预定时间段的波形,判断是否可以将增益恢复成它的原始值。
在上述第二典型实施例中,如果由ACC 101p检测到的输出在预定时间段内减小,则镜头CPU 6808将增益恢复成它的原始值,从而当在照相机受到连续冲击的时间段期间没有瞬时冲击时,不将增益恢复成它的原始值。
在本典型实施例中,镜头CPU 6808检测驱动指示时刻。因此,由于输入了驱动结束时刻,因而镜头CPU 6808可以识别出在输入驱动结束时刻之后没有向照相机施加大的振动。
现在,下面详细说明用于通过计算和使用多个频率水平的转动半径L的平均值来校正平行振动的方法。
如以上参考图48所述,本典型实施例在计算转动半径L时使用三对BPF。转动半径平均单元5401计算由比较单元3905、3906和4806计算出的转动半径L的平均值。因此,本典型实施例通过使用例如2Hz、5Hz和8Hz的提取频率水平下的、由转动半径平均单元5401平均后的转动半径L,来校正平行振动。
转动半径平均单元5401计算图50~52所示的各采样周期5002~5004的、由比较单元3905、3906和4806计算出的转动半径L的平均。当开始拍摄时,镜头CPU 6808还计算针对每一采样周期计算出的转动半径L的平均值的平均,以校正平行振动。
关于用于校正平行振动的转动半径L的平均,如果代替计算从开始检测转动半径的时刻起到开始拍摄的时刻为止的时间段的平均,而如以上在第二典型实施例中所述的那样更新各预定时间段的移动平均,这也是有用的。在这种情况下,镜头CPU6808通过使用紧挨着拍摄开始之前的时间段中的最新更新后的 值,计算匹配状况判断值。
输出校正单元309通过将陀螺仪6807p的HPF积分滤波器301的输出(振动角度)乘以从转动半径平均单元5401输入的转动半径L和基于变焦和调焦信息302计算出的摄像倍率,计算平行振动校正目标值。
驱动单元6809在半按下释放按钮6804a的时间段期间,基于来自灵敏度调整单元303的角振动校正目标值,驱动振动校正单元6806以校正角振动。
当完全按下释放按钮6804a时(在曝光时间段期间),驱动单元6809基于角振动校正目标值和来自输出校正单元309的平行振动校正目标值,驱动振动校正单元6806。
利用上述结构,本典型实施例可以通过使用针对各频率计算出的转动半径L的平均值,计算转动半径L。因此,本典型实施例可以稳定地执行平行振动的校正。
在图54所示的例子中,使用多个BPF。然而,本典型实施例不局限于此。例如,如以上参考图53所述,如果使用傅立叶变换来计算各频率下的转动半径L,并且通过使用转动半径L的平均值计算转动半径L,这也是有用的。
如上所述,本典型实施例通过使用针对各频率计算出的转动半径L的平均值,计算转动半径L。因此,本典型实施例可以稳定地校正平行振动。
下面说明本发明的第五典型实施例。图56示出根据本典型实施例的单镜头反光照相机中包括的图像稳定控制设备的示例性结构。
关于转动半径L,代替计算多个频率水平下的转动半径L的平均值,本典型实施例计算振动速度变得最高的频率下的转动半径L。
因此,图56所示的本典型实施例的结构在下面的点上不同于上述图54所示的第四典型实施例的结构。
-本典型实施例包括最大振幅检测单元5601~5603。
-代替转动半径平均单元5401,本典型实施例包括频率选择单元5604。
如以上参考图48所述,本典型实施例在计算转动半径L中使用三对BPF。
将来自各最大振幅检测单元5601~5603的输出信号输入至频率选择单元5604。频率选择单元5604选择振动速度变得最高的频率。另外,频率选择单元5604将所选择的频率下的转动半径L(从比较单元3905、3906和4806中的任何一个输出的信号)输出至输出校正单元309。
下面详细说明来自最大振幅检测单元5601~5603的输出信号。
最大振幅检测单元5602和5603各自计算各采样周期5102~5104(图51)和5202~5204(图52)期间内的速度的最大值和最小值。此外,最大振幅检测单元5602和5603各自基于速度的最大值和最小值之间的差,计算最大振幅5105~5107(图51)和5205~5207(图52)。
类似地,最大振幅检测单元5601计算采样周期5002~5004(图50)期间内的速度的最大值和最小值。此外,最大振幅检测单元5601基于该速度的最大值和最小值之间的差,计算最大振幅5005~5007。
当开始拍摄时,最大振幅检测单元5601还计算针对各采样周期计算出的最大振幅的平均值。另外,最大振幅检测单元5601将该平均值的信号输出至频率选择单元5604。
关于最大振幅信号,如果代替使用从检测转动半径到开始 拍摄的时间段的平均,而如以上在第二典型实施例中所述的那样更新各预定时间段的移动平均,这也是有用的。
频率选择单元5604选择紧挨在开始拍摄之前计算出的各频率水平的最大振幅中振动速度最高的频率,并且将与所选择的频率相对应的比较单元3905、3906或4806的输出输出至输出校正单元309。比较单元3905、3906和4806各自计算各采样周期的转动半径L。当开始拍摄时,比较单元3905、3906和4806还各自计算针对各采样周期计算出的转动半径L的平均。关于表示转动半径L的信号,如果代替使用从检测转动半径到开始拍摄的时间段的平均,而如以上在第二典型实施例中所述的那样更新各预定时间段的移动平均,这也是有用的。
如上所述,在本典型实施例中,各频率的转动半径L的检测持续至紧挨在开始拍摄之前的时刻,并且频率选择单元5604选择振动速度变得最高的频率下的转动半径L。
输出校正单元309通过将陀螺仪6807p的HPF积分滤波器301的输出(振动角度)乘以从频率选择单元5604输入的转动半径L和基于变焦和调焦信息302计算出的摄像倍率,计算平行振动校正目标值。
驱动单元6809在半按下释放按钮6804a的时间段期间,基于来自灵敏度调整单元303的角振动校正目标值,驱动振动校正单元6806以校正角振动。
当完全按下释放按钮6804a时(在曝光时间段期间),驱动单元6809基于角振动校正目标值和来自输出校正单元309的平行振动校正目标值,驱动振动校正单元6806。
利用上述结构,本典型实施例可以计算振动速度变得最高的频率下的转动半径L。因此,当在特定频率下发生大的振动时,本典型实施例可以防止平行振动的校正精度的下降。
在图56所示的例子中,使用多个BPF。然而,本典型实施例不局限于此。例如,如以上参考图53所述,如果使用傅立叶变换来计算各频率下的转动半径L,并且通过使用转动半径L的平均值计算转动半径L,这也是有用的。
在选择频率时,本典型实施例使用通过积分ACC 101p的输出所计算出的速度输出的最大振幅。然而,本典型实施例不局限于此。例如,如果使用通过二阶积分ACC 101p的输出计算出的振动的位移、陀螺仪6807p的输出、或通过积分陀螺仪6807p的输出计算出的角度输出,这也是有用的。
利用上述结构,本典型实施例可以计算振动速度变得最高的频率下的转动半径L。因此,当在特定频率下发生大的振动时,本典型实施例可以防止平行振动的校正精度的下降。因此,本典型实施例可以稳定地校正平行振动。
下面详细说明本发明的第六典型实施例。图57示出根据本典型实施例的单镜头反光照相机中所包括的图像稳定控制设备的示例性结构。
图57所示的本典型实施例的结构在下面的点上不同于以上图56所示的第五典型实施例的结构。
-关于转动半径L,代替振动速度变得最高的频率下的转动半径L,本典型实施例根据照相机的姿势选择利用转动半径L的频率。
因此,图57所示的结构在下面的点上不同于图56所示的结构。代替最大振幅检测单元5601~5603,本典型实施例包括姿势检测单元5701。
将ACC 101p的输出的信号输入至姿势检测单元5701。此外,尽管图57未示出,但是也将来自ACC 101y的信号和来自ACC 101z的信号输入至姿势检测单元5701,其中,ACC 101y 在与ACC 101p的检测方向垂直的方向上执行检测,ACC 101z在与ACC 101p和ACC 101y的检测方向垂直的方向上执行检测。姿势检测单元5701使用来自ACC 101p、101y和101z的信号来检测照相机的姿势。
图58A~58H各自示出要检测的照相机的姿势和在各照相机姿势中ACC的检测方向。
在图58A~58H所示的例子中,箭头101pa表示ACC 101p的加速度的检测方向。箭头101ya表示ACC 101y的加速度的检测方向。箭头101za表示ACC 101z的加速度的检测方向。箭头5809表示重力的方向。
姿势5801(图58A)表示照相机朝上。姿势5802(图58B)表示水平保持照相机(横向拍摄姿势)且照相机朝上倾斜45度。姿势5803(图58C)表示垂直保持照相机(纵向拍摄姿势)且照相机朝上倾斜45度。
姿势5804(图58D)表示以横向拍摄姿势水平保持照相机。姿势5805(图58E)表示以纵向拍摄姿势垂直保持照相机。
姿势5806(图58F)表示水平保持照相机(横向拍摄姿势)且照相机朝下倾斜45度。姿势5807(图58G)表示垂直保持照相机(纵向拍摄姿势)且照相机朝下倾斜45度。姿势5808(图58H)表示照相机朝下。
转动半径L可能根据照相机的保持姿势而改变。在这点上,例如,在姿势5804,随着频率变高,转动半径L变小。在姿势5801和5808,低频平行振动成为主要的。
当如姿势5805一样,拍摄者以纵向拍摄姿势垂直保持照相机时,在以箭头101ya表示的方向上发生大的高频平行振动。因此,在姿势5804,如果通过使用基于各频率2Hz、5Hz和8Hz下的ACC和陀螺仪的输出所计算出的转动半径L的平均值来校 正平行振动,这是有用的。
在姿势5801和5808,如果通过使用基于2Hz下的ACC和陀螺仪的输出所计算出的转动半径L来校正平行振动,这是有用的。在姿势5805,如果通过使用基于8Hz下的ACC和陀螺仪的输出所计算出的转动半径L来校正平行振动,这是有用的。
频率选择单元5604根据来自姿势检测单元5701的信号,计算来自比较单元3905、3906和4806的信号的平均。可选地,频率选择单元5604选择来自比较单元3905的信号或来自比较单元4806的信号。频率选择单元5604将信号中所包括的转动半径L输出至输出校正单元309。
输出校正单元309通过将陀螺仪6807p的HPF积分滤波器301的输出(振动角度)乘以从输出校正单元309输入的转动半径L和基于变焦和调焦信息302计算出的摄像倍率,来计算平行振动校正目标值。
驱动单元6809在半按下释放按钮6804a的时间段期间,基于来自灵敏度调整单元303的角振动校正目标值,驱动振动校正单元6806以校正角振动。
当完全按下释放按钮6804a时(在曝光时间段期间),驱动单元6809基于角振动校正目标值和来自输出校正单元309的平行振动校正目标值,驱动振动校正单元6806。
利用上述结构,本典型实施例可以根据照相机的拍摄姿势,计算最主要导致振动发生的频率下的转动半径L。因此,本典型实施例可以在开始拍摄之前,稳定地校正平行振动。
下面说明本发明的第七典型实施例。图59示出根据本典型实施例的单镜头反光照相机中所包括的图像稳定控制设备的示例性结构。
图59所示的本典型实施例的结构在下面的点上不同于以 上图57所示的第六典型实施例的结构。代替使用多个BPF,本典型实施例仅使用一个BPF,并且本典型实施例根据照相机的姿势改变BPF的提取频率。
因此,图59所示的结构在下面的点上不同于图57所示的结构。
1)本典型实施例不包括陀螺仪BPF 1单元3901、ACC BPF 1单元3902、陀螺仪BPF 2单元3903、ACC BPF 2单元3904、陀螺仪BPF 3单元4804、ACC BPF 3单元4805和频率选择单元5604。另外,在本典型实施例中,将陀螺仪6807p的输出和ACC 101p的输出(HPF相位调整单元304的输出和增益校正单元4104的输出)分别输入至陀螺仪可变BPF单元5901和ACC可变BPF单元5902。
2)在本典型实施例中,将姿势检测单元5701的输出输入至陀螺仪可变BPF单元5901和ACC可变BPF单元5902。
3)将来自比较单元3905的转动半径计算正在进行信号输入至增益恢复禁止单元4102。
如果照相机处于姿势5804,则姿势检测单元5701将陀螺仪可变BPF单元5901和ACC可变BPF单元5902的BPF提取频率设置成5Hz。如果照相机处于姿势5805,则姿势检测单元5701将陀螺仪可变BPF单元5901和ACC可变BPF单元5902的BPF提取频率设置成8Hz。如果照相机处于姿势5801或5808,则姿势检测单元5701将陀螺仪可变BPF单元5901和ACC可变BPF单元5902的BPF提取频率设置成2Hz。
可以通过预先检测照相机的姿势来确定用于提取转动半径L的频率。因此,在这种情况下,不必向照相机设置多个BPF。此外,在这种情况下,可以降低工作负荷。因此,本典型实施例可以实现应用于消费品时有用的平行振动校正系统。
比较单元3905基于陀螺仪可变BPF单元5901和ACC可变BPF单元5902的输出,计算转动半径L。此外,比较单元3905将计算出的转动半径L输出至输出校正单元309。
输出校正单元309通过将陀螺仪6807p的HPF积分滤波器301的输出(振动角度)乘以从比较单元3905输入的转动半径L和基于变焦和调焦信息302计算出的摄像倍率,来计算平行振动校正目标值。
驱动单元6809在半按下释放按钮6804a的时间段期间,基于来自灵敏度调整单元303的角振动校正目标值,驱动振动校正单元6806以校正角振动。
当完全按下释放按钮6804a时(在曝光时间段期间),驱动单元6809基于角振动校正目标值和来自输出校正单元309的平行振动校正目标值,驱动振动校正单元6806。
如上所述,本典型实施例根据拍摄期间照相机的姿势,设置用于提取对产生振动最主要的频率的BPF。因此,不必向照相机设置多个BPF。此外,可以降低工作负荷。因此,本典型实施例可以实现应用于消耗品时有用的平行振动校正系统。
下面说明本发明的第八典型实施例。图60示出根据本典型实施例的单镜头反光照相机中所包括的图像稳定控制设备的示例性结构。
图60所示的本典型实施例的结构在下面的点上不同于上述图59所示的第七典型实施例的结构。与第七典型实施例中一样,本典型实施例使用一个BPF的可变频率。
然而,在本典型实施例中,提取频率随着时间的过去而改变。也就是说,本典型实施例以预定周期的间隔(例如,比周期2801(图28)长两倍的周期)改变BPF的转折频率。
更具体地,本典型实施例在2Hz的转折频率下用时1秒。然 后,本典型实施例基于该1秒时间段期间的速度信号和角速度信号的最大振幅,计算转动半径L。
此外,本典型实施例在5Hz的转折频率下用时0.4秒。然后,本典型实施例基于该0.4秒时间段期间的速度信号和角速度信号的最大振幅,计算转动半径L。另外,本典型实施例在8Hz的转折频率下用时0.25秒。然后,本典型实施例基于该0.25秒时间段期间的速度信号和角速度信号的最大振幅,计算转动半径L。
为了对此进行说明,在作为第一频带按时间顺序所提取的多个不同频带中,基于第一信号和第二信号计算转动半径L(校正值)。因此,图60所示的结构在下面的点上不同于图59所示的结构。
代替姿势检测单元5701,本典型实施例包括BPF控制单元6001。将来自BPF控制单元6001的输出信号输入至陀螺仪可变BPF单元5901和ACC可变BPF单元5902。BPF控制单元6001从开始检测转动半径起(即,从时刻t2(图30)起),为陀螺仪可变BPF单元5901和ACC可变BPF单元5902设置2Hz、5Hz和8Hz的BPF转折频率,并且以循环方式使用该BPF转折频率。
在循环期间可以按照如“2Hz→5Hz→8Hz→5Hz→2Hz→5Hz”等的数值降序或升序循环使用BPF转折频率,以防止频率快速变化(例如,8Hz→2Hz)。这是因为,如果快速改变频率,则在改变转折频率之后需要时间来稳定BPF。
比较单元3905计算陀螺仪可变BPF单元5901和ACC可变BPF单元5902各自的BPF转折频率下的转动半径L。当开始拍摄时,比较单元3905计算转动半径L的平均值,并且将该平均值输出至输出校正单元309。可选地,比较单元3905可以更新各转折频率下的转动半径L的移动平均(例如,三个转动半径L的平 均)。在这种情况下,当开始拍摄时,比较单元3905将最新的转动半径L输出至输出校正单元309。
输出校正单元309通过将陀螺仪6807p的HPF积分滤波器301的输出(振动角度)乘以从比较单元3905输入的转动半径L和基于变焦和调焦信息302计算出的摄像倍率,来计算平行振动校正目标值。
驱动单元6809在半按下释放按钮6804a的时间段期间,基于来自灵敏度调整单元303的角振动校正目标值,驱动振动校正单元6806以校正角振动。
当完全按下释放按钮6804a时(在曝光时间段期间),驱动单元6809基于角振动校正目标值和来自输出校正单元309的平行振动校正目标值,驱动振动校正单元6806。
在本典型实施例中,使用按时间顺序可变的BPF提取频率。因此,不必向照相机设置多个BPF。此外,本典型实施例可以降低工作负荷。因此,本典型实施例可以实现应用于消费品时有用的平行振动校正系统。
下面说明本发明的第九典型实施例。在上述典型实施例1~8中,将图像稳定控制设备应用于具有可更换镜头的单镜头反光照相机。然而,本发明不局限于此。例如,本发明可应用于将镜头一体地安装在设备体上的小型照相机或摄像机,或者可应用于便携式装置中组合的照相机系统。
在上述第一~第八典型实施例中,使用ACC 101p和101y来检测平行振动。本典型实施例使用除ACC以外的传感器来检测平行振动。
图61示出根据本典型实施例的照相机和包括在该照相机中的图像稳定控制设备的示例性结构。在图61中示出数字小型照相机。然而,可以使用单镜头反光照相机。
作为本典型实施例的特性特征,本典型实施例使用振动校正单元6806来检测发生在摄像光学系统的主点周围的平行振动。
可以通过观察和检测流过振动校正单元的驱动线圈的电流量,来执行通过使用振动校正单元检测角速度的方法。振动校正单元的从动组件包括校正透镜、校正透镜的支持架和驱动线圈(或驱动磁铁)。因此,振动校正单元的质量充分大于ACC的角速度检测质量。如果角速度检测质量变大,则角速度的检测精度增大。因此,在这种情况下,可以通过使用振动检测单元高精度地检测角速度。
然而,在这点上,振动校正单元的从动组件通常通过滑动接触与振动校正单元的固定组件接触。源自滑动接触的摩擦力可能使得角速度检测精度下降。
在这点上,在通过与角速度信号比较来计算转动半径L时,本发明通过仅提取特定频率分量来执行该比较。因此,本发明可以抑制或降低源自滑动摩擦的影响。
如果使用图62A和62B所示的振动校正单元,则可以防止滑动摩擦。图62A和62B分别是利用配线(wire)弹性支持的振动校正单元6201(相当于图61中的振动校正单元6806)的例子的平面图和横断面。
参考图62A和62B,通过支持架6203支持校正透镜6202。支持架6203包括驱动线圈6207a和6207b以及用于将驱动线圈6207a和6207b与配线连接的支持配线板6209。
在作为固定单元的基板6204与支持配线板6209之间,设置配线6205a~6205d。
尽管在图62A和62B中未示出焊接部分6211b、6211d、6212b和6212d,但是在焊接部分6211a~6211d和6212a~6212d处,将 配线6205a~6205d焊接在基板6204及支持配线板6209上。
在将配线6205a~6205d焊接在基板6204及支持配线板6209上时,使用专用工具以调节校正透镜6202和基板6204之间的间隔和倾斜度。因此,可以提高校正透镜6202在基板6204上的安装精度。
通过配线6205a~6205d和支持配线板6209上的图案6206a~6206d,从基板6204向驱动线圈6207a和6207b供电。在面向驱动线圈6207a和6207b的基板6204上,包括被安装在其上的永久磁铁6208a和6208b。在图62中,以虚线矩形示出永久磁铁6208a和6208b。
因此,如果通过驱动线圈6207a和6207b馈送电流,则由于在弯曲配线6205a~6205d时通过驱动线圈6207a和6207b的电流的平衡而导致相对于光轴6210在方向6213p和6213y上驱动校正透镜6202。
在基板6204上组装磁型、光学型或涡流(EC)型位置检测传感器6215a和6215b。位置检测传感器6215a和6215b检测安装在支持配线板6209上的靶材(target)6214a和6214b之间的距离。分别通过差动放大器6216a和6216b,将来自位置检测传感器6215a和6215b的输出放大成充分的水平。基于放大后的信号,通过驱动线圈6207a和6207b馈送电流。
如果将位置检测传感器6215a和6215b的输出负反馈至驱动线圈6207a和6207b,则实现了位置反馈。将校正透镜6202电固定在位置检测传感器6215a和6215b各自的输出都为“0”的点处。
当将校正透镜6202设置在其它摄像光学系统(未示出)的光轴上时,本典型实施例调整位置检测传感器6215a和6215b的偏置电压和增益,从而使得位置检测传感器6215a和6215b的输出为“0”。在这种情况下,校正透镜6202在该位置被稳定地支持。
在这种状态下,如果输入角振动或平行振动等振动校正目标值6217a和6217b,则根据该目标值,以循迹方式高精度地驱动校正透镜6202。
即使在没有输入振动校正目标值时,振动校正单元6201的从动组件也经受重力和平行振动的加速度。因此,逆着配线6205a~6205d的弹力,改变校正透镜6202的位置。
位置检测传感器6215a和6215b检测校正透镜6202的位置变化。此外,配线6205a~6205d向驱动线圈6207a和6207b馈送抵消该位置变化的电流。因此,校正透镜6202可以稳定地保持在它的初始位置。
因此,通过观察和检测通过驱动线圈6207a和6207b的电流,可以检测输入的重力和平行振动加速度。本典型实施例利用所检测到的加速度输出,以便以上述方式计算与来自陀螺仪的输出相关的转动半径L,并且进一步校正平行振动。如果使用利用配线的上述支持方法,则由于没有滑动摩擦,因而可以高精度地检测加速度。
在振动校正单元正在执行角振动等振动的校正的时间段期间,电流的变化可能导致加速度检测精度的极大下降。在这点上,本典型实施例执行控制,以将振动校正单元6201电反馈至它的初始位置(拍摄光轴和校正透镜的光轴匹配的位置),直到紧挨在开始拍摄之前为止。
此外,本典型实施例仅在正基于角振动校正目标值和平行振动校正目标值执行曝光时才驱动校正透镜。因此,本典型实施例校正图像抖动。更具体地,本典型实施例在开始曝光之前使用振动校正单元6201作为ACC,并且在开始曝光之后使用振动校正单元6201作为振动校正单元。
因此,在准备拍摄期间(半按下释放按钮6804a期间),在第 一~第八典型实施例中,不能以上述方式光学校正角振动。
在这点上,数字照相机可以利用电子图像稳定功能。电子图像稳定功能是一种用于通过根据振动改变帧的拍摄位置来降低图像传感器所输出的拍摄帧之间的振动的功能。
如果使用电子图像稳定功能,则可以根据图像传感器输出的帧之间的运动矢量的变化,或者基于陀螺仪6807p和6807y的输出,控制拍摄位置。更具体地,在这种情况下,如果本典型实施例在开始拍摄之前使用电子图像稳定功能,而在开始拍摄时,本典型实施例驱动校正透镜以执行光学图像稳定,这也是有用的。
图63是示出根据本典型实施例的上述处理的示例性流程的流程图。在图63所示的例子中,以相同的步骤附图标记表示与图32中的步骤相同的步骤。因此,这里不再重复对其的说明。当接通照相机的电源时,开始根据图63所示的流程的处理。与接通照相机的电源同步地,将振动校正单元电保持在初始位置。
参考图63,在步骤S6301,镜头CPU 6808通过检测经由振动校正单元6201的驱动线圈馈送的电流,检测施加于振动校正单元6201上的加速度。此时,振动校正单元6201的校正透镜差不多位于整个摄像光学系统的主点处。因此,在步骤S6301检测摄像光学系统的主点处的平行振动加速度。如在步骤S3202(图32)中一样,在步骤S6301,镜头CPU 6808启动陀螺仪,并且驱动AF传感器。
在步骤S6302,镜头CPU 6808开始执行针对角振动的电子图像稳定。更具体地,镜头CPU 6808改变从图像传感器输出的图像信号的拍摄位置,其中,基于陀螺仪的输出(角振动校正目标值(灵敏度调整单元303的输出))按时间顺序输出从图像传感器输出的图像信号,从而降低由于图片间振动而发生的构图偏 差。然后,镜头CPU 6808在背面的LCD监视器(未示出)上输出该图像信号。如果代替使用来自陀螺仪的信号,而计算按时间顺序输出的图像信号之间的运动矢量,并且基于计算出的运动矢量的值,改变图像信号的拍摄位置,这也是有用的。
在步骤S6303,由于在步骤S3207已检测到了照相机的摇动,因而镜头CPU 6808暂停执行电子图像稳定。用于暂停检测转动半径的处理类似于在步骤S3208(图32)中所执行的处理。在步骤S6304,由于在步骤S3209结束了照相机的摇动,因而镜头CPU 6808重新开始执行电子图像稳定。用于重新开始检测转动半径的处理类似于在步骤S3210(图32)中所执行的处理。
在步骤S6305,镜头CPU 6808暂停执行电子图像稳定,并且基于平行振动和角振动校正目标值驱动振动校正单元6201。因此,镜头CPU 6808开始执行光学图像稳定。在步骤S6306,由于在步骤S3219完成累积了来自图像传感器的输出(曝光已结束),因而镜头CPU 6808暂停执行光学图像稳定。然后,镜头CPU 6808开始执行电子图像稳定,以校正角振动。
尽管暂停了光学图像稳定,但是通过已被恢复至它的初始位置并被电保持在该初始位置的振动校正单元继续进行加速度的检测。当在这种状态下按下主电源开关时,可以取消将振动校正单元保持在它的初始位置。
在步骤S6307,由于从半按下释放按钮6804a开始已经过了预定时间段,因而镜头CPU 6808暂停执行电子图像稳定和角振动的检测。在步骤S6308,镜头CPU 6808暂停利用振动校正单元检测加速度。
拍摄镜头的主点和振动校正单元的位置根据变焦位置和调焦位置而改变。本典型实施例以以上参考图38所述的方式,校正拍摄镜头的主点和振动校正单元的位置的变化。
下面说明本发明的第十典型实施例。图64示出根据本典型实施例的照相机和包括在该照相机中的图像稳定控制设备的示例性结构。图64示出数字小型照相机。如果使用单镜头反光照相机,这也是有用的。
同样,在本典型实施例中,通过使用不同于ACC的传感器来检测平行振动。
作为本典型实施例的特征,本典型实施例包括第二振动检测单元,其中,该第二振动检测单元用作用于基于摄像单元(以下还称之为“图像传感器6401”)的输出检测振动的单元。更具体地,本典型实施例通过使用图像传感器6401的图像输出,检测摄像光学系统的主点周围发生的平行振动。
作为“电子图像稳定”或“图像合成”,已知通过比较从图像传感器6401按时间顺序输出的图像来检测振动和合成偏差的方法。然而,除非可以无损地读取来自图像传感器的输出,否则电子图像稳定和图像合成不能应用于静止图像。
然而,如果使用上述用于通过使用预先计算出的转动半径L作为校正值来校正角速度输出的方法,则可以使用图像传感器的输出。
更具体地,如果使用通过基于图像输出检测振动并对检测结果和基于角速度输出的角度进行比较来计算转动半径L的方法,则即使当在拍摄静止图像之前通过利用拍摄准备状态(运动图片拍摄状态)拍摄静止图像时,也可以校正角速度输出。
利用上述结构,本典型实施例可以在开始拍摄静止图像之前校正角速度输出。因此,在拍摄静止图像的情况下,可以使用通常仅在拍摄运动图像的情况下利用的图像输出。
图65示出根据本典型实施例的示例性运动矢量。参考图65,图像6501a包括特定时刻的花的图像。图65中以淡色线示出 的图像6501b包括在经过了预定时间段之后(例如,经过了1/30秒之后)的花的图像。
由于角振动和平行振动而导致这两个图像具有不同的构图。
本典型实施例在作为图像6501a的主被摄体的花6502a的边缘6503a等具有高对比度的部分处设置特征点。本典型实施例基于与特征点6503a有关的位置信息和与图像6501b的花6502b的边缘图像有关的信息,计算与特征点6503a相对应的特征点6503b。
箭头6504y和6504p表示连接这两个特征点的运动矢量6504的水平和垂直分量。对于各图像,可以通过合成已被分解成两个方向上的分量的运动矢量,来获取图像上振动的位移。
在这点上,说明垂直运动矢量6504p。如果累积了特定时刻的图像之间的运动矢量,则可以获得要输入至运动矢量BPF单元6403(图64)的波形6602(图66)。
运动矢量BPF单元6403仅使波形6602的第一频带分量(例如,2Hz)通过。因此,本典型实施例可以抑制叠加在运动矢量上的噪声和由于被摄体的移动而可能发生的低频偏差。因此,本典型实施例可以高精度地仅检测振动分量。
关于来自陀螺仪的输出,本典型实施例使用HPF积分延迟调整单元6402,以将角速度转换成角度。因此,可以设置与运动矢量的维数相同的维数(延迟调整)。下面详细说明延迟调整,通过延迟调整,比较基于摄像单元的输出所检测到的偏差的位移和由ACC检测到的振动角度以进行调整。
然后,陀螺仪BPF单元306仅使角度波形的第一频带分量通过。因此,可以去除可能叠加在角度波形上的低频漂移分量。
在图66所示的例子中,向照相机施加正弦波振动。在图66 所示的例子中,在水平轴上示出时间。在垂直轴上示出通过累积图像之间的垂直运动矢量所获得的图像偏差X的轨迹。
波形6602的相位与波形6601的相位发生偏移,其中,波形6601是由于实际振动而发生的图像偏差的波形。由于用于利用图像传感器6401读取图像所用的时间而导致的延迟,使得发生相位偏差。
在这点上,在本典型实施例中,将来自陀螺仪6807p的输出输入至HPF积分延迟调整单元6402.然后,积分角速度以将其转换成角度。然后,相加与图像传感器6401中的延迟相等的延迟。因此,可以使得陀螺仪BPF单元306的输出波形6603的相位与波形6602的相位相同。
在本典型实施例中,如果来自图像传感器6401的输出信号被延迟,可以通过同样延迟角速度信号来相互比较输出信号和角速度信号。这是因为,仅在拍摄期间才需要转动半径L,并且不必实时计算转动半径L。
在本典型实施例中,将运动矢量BPF单元6403和陀螺仪BPF单元306的提取频率设置成2Hz。这是因为,在数字小型照相机上仅发生小量的高频振动。
比较单元3905通过比较波形6602和6603(X/θ)计算转动半径L,并且将计算结果输出至输出校正单元309。通过HPF积分滤波器301将陀螺仪6807p的输出转换成振动角度。然后,输出校正单元309将振动角度乘以转动半径L。因此,获得振动校正目标值。
在本典型实施例中,由于下面的原因,在图64所示的结构中没有包括图61中示出的灵敏度调整单元303以及变焦和调焦信息302。
由图像传感器6401检测到的图像的偏差已包括由于基于 变焦和调焦状态而确定的灵敏度和摄像倍率以及角振动而发生的图像的偏差。因此,如果在这种情况下基于图像传感器6401的输出计算转动半径L,则计算出的转动半径L中由于灵敏度、摄像倍率和角振动而导致的图像偏差已得以校正。
如上所述,本典型实施例基于由图像传感器6401拍摄的图像计算转动半径L。因此,校正灵敏度和摄像倍率就变得不必要了。此外,在这种情况下,单独校正角振动和平行振动也变得不必要了。因此,本典型实施例可以与拍摄镜头的主点无关地校正平行振动。
在开始拍摄前,本典型实施例执行电子图像稳定,直到开始拍摄为止,但是不是象第九典型实施例中那样驱动振动校正单元,以通过使振动校正单元处于它的初始位置来提高由图像传感器6401输出的图像之间的运动矢量的检测精度。
如果在驱动振动校正单元并且校正角振动的状态下计算图像传感器的运动矢量,则由图像传感器输出的图像之间的运动矢量是由于平行振动分量而发生的图像偏差。
在这种情况下,如果如图67所示,通过使用灵敏度调整单元303以及变焦和调焦信息302来计算角振动校正目标值,将平行振动校正目标值与计算出的角振动校正目标值相加,并且在拍摄期间校正振动,这是有用的。即使在这种情况下,在计算平行振动校正目标值时,也不必校正拍摄镜头的主点和摄像倍率。
根据本发明的上述典型实施例,在特定频带利用加速度检测单元的输出校正角速度检测单元的输出,或者可选地,在特定频带利用来自摄像单元的运动矢量信号校正角速度检测单元的输出。
利用上述结构,即使在微距拍摄中,本典型实施例也可以 实现具有高可移动性和稳定性的小型化图像稳定系统。更具体地,具有上述结构的本典型实施例可以高精度地校正由于平行振动而发生的图像抖动。
在本发明的第一~第十典型实施例中,通过包括在数字单镜头反光照相机或数字小型照相机中的示例性图像稳定控制设备来校正平行振动。然而,由于可以在具有高性能的小型化系统中实现根据本发明典型实施例的图像稳定控制设备,因而本发明不局限于此。例如,在利用摄像机拍摄静止图像时,或者在利用监视照相机、网络照相机或移动电话拍摄静止图像时,可以实现本发明。
尽管参考典型实施例说明了本发明,但是应该理解,本发明不局限于所公开的典型实施例。所附权利要求书的范围符合最宽的解释,以包含所有修改、等同结构和功能。
Claims (23)
1.一种图像稳定控制设备,包括:
振动校正单元,用于校正由于施加到所述图像稳定控制设备的振动而发生的图像抖动;
第一振动检测单元,用于检测并输出所述振动的角速度;
第二振动检测单元,用于检测并输出所述振动的加速度;
第一提取器,用于基于所述第一振动检测单元的输出,提取预定频带中的信号,所述第一提取器用于提取频带比由于照相机抖动而发生的振动的频带窄的信号,其中,所述照相机包括所述图像稳定控制设备;
第二提取器,用于基于所述第二振动检测单元的输出,提取预定频带中的信号,所述第二提取器用于提取频带比由于所述照相机抖动而发生的振动的频带窄的信号;
计算单元,用于基于由所述第一提取器和所述第二提取器提取的信号,计算校正值;
输出校正单元,用于使用所述校正值校正所述第一振动检测单元的输出;以及
驱动单元,用于基于由所述输出校正单元校正后的所述第一振动检测单元的输出,驱动所述振动校正单元。
2.根据权利要求1所述的图像稳定控制设备,其特征在于,所述第一提取器和所述第二提取器提取相同预定频带中的信号。
3.根据权利要求1所述的图像稳定控制设备,其特征在于,所述第一振动检测单元包括角速度测量仪,并且所述第二振动检测单元包括加速度测量仪。
4.根据权利要求1所述的图像稳定控制设备,其特征在于,利用流过驱动线圈的电流来驱动所述振动校正单元,以及
其中,所述第二振动检测单元用于基于流过所述驱动线圈的电流来检测振动的加速度。
5.根据权利要求1所述的图像稳定控制设备,其特征在于,所述第一提取器和所述第二提取器均为傅立叶变换单元,并且均通过利用所述傅立叶变换单元计算频率分量的谱来提取信号。
6.根据权利要求1所述的图像稳定控制设备,其特征在于,所述第一提取器和所述第二提取器均包括用于提取振动的振幅的振幅提取单元,并且均用于基于由所述振幅提取单元提取的振幅来提取信号。
7.根据权利要求1所述的图像稳定控制设备,其特征在于,所述第一提取器和所述第二提取器用于基于由于所述照相机抖动而发生的所述振动的频率,提取多个不同预定频带中的信号。
8.根据权利要求7所述的图像稳定控制设备,其特征在于,所述计算单元用于计算所述多个不同预定频带中的所述校正值的平均值,并且将所述平均值输出至所述输出校正单元。
9.根据权利要求7所述的图像稳定控制设备,其特征在于,所述计算单元用于基于由所述第一提取器和所述第二提取器提取的信号中的、信号相位彼此最近的频带中的信号,计算所述校正值。
10.根据权利要求1所述的图像稳定控制设备,其特征在于,所述第一提取器和所述第二提取器用于提取从由于所述照相机抖动而发生的所述振动的频率按时间顺序提取的多个不同预定频带中的信号。
11.根据权利要求10所述的图像稳定控制设备,其特征在于,所述计算单元用于计算所述多个不同预定频带中的所述校正值的平均值,并且将所述平均值输出至所述输出校正单元。
12.根据权利要求10所述的图像稳定控制设备,其特征在于,所述计算单元用于基于由所述第一提取器和所述第二提取器提取的信号中的、信号相位彼此最近的频带中的信号,计算所述校正值。
13.一种照相机,包括根据权利要求1所述的图像稳定控制设备。
14.一种包括摄像单元的照相机,所述照相机包括:
振动校正单元,用于校正由于施加到所述照相机的振动而发生的图像抖动;
第一振动检测单元,用于检测并输出所述振动的角速度;
第二振动检测单元,用于基于所述摄像单元的输出,检测并输出所述振动的位移;
第一提取器,用于基于所述第一振动检测单元的输出,提取预定频带中的信号,所述第一提取器用于提取频带比由于照相机抖动而发生的振动的频带窄的信号;
第二提取器,用于基于所述第二振动检测单元的输出,提取预定频带中的信号,所述第二提取器用于提取频带比由于照相机抖动而发生的振动的频带窄的信号;
计算单元,用于基于由所述第一提取器和所述第二提取器提取的信号,计算校正值;
输出校正单元,用于使用所述校正值校正所述第一振动检测单元的输出;以及
驱动单元,用于基于由所述输出校正单元校正后的所述第一振动检测单元的输出,驱动所述振动校正单元。
15.根据权利要求14所述的照相机,其特征在于,所述第一提取器和所述第二提取器提取相同预定频带中的信号。
16.根据权利要求14所述的照相机,其特征在于,所述第一提取器和所述第二提取器均为傅立叶变换单元,并且均通过利用所述傅立叶变换单元计算频率分量的谱来提取信号。
17.根据权利要求14所述的照相机,其特征在于,所述第一提取器和所述第二提取器均包括用于提取振动的振幅的振幅提取单元,并且均用于基于由所述振幅提取单元提取的振幅来提取信号。
18.根据权利要求14所述的照相机,其特征在于,所述第一提取器和所述第二提取器用于基于由于照相机抖动而发生的所述振动的频率,提取多个不同预定频带中的信号。
19.根据权利要求18所述的照相机,其特征在于,所述计算单元用于计算所述多个不同预定频带中的所述校正值的平均值,并且将所述平均值输出至所述输出校正单元。
20.根据权利要求18所述的照相机,其特征在于,所述计算单元用于基于由所述第一提取器和所述第二提取器提取的信号中的、信号相位彼此最近的频带中的信号,计算所述校正值。
21.根据权利要求14所述的照相机,其特征在于,所述第一提取器和所述第二提取器用于提取从由于照相机抖动而发生的所述振动的频率按时间顺序提取的多个不同预定频带中的信号。
22.根据权利要求21所述的照相机,其特征在于,所述计算单元用于计算所述多个不同预定频带中的所述校正值的平均值,并且将所述平均值输出至所述输出校正单元。
23.根据权利要求21所述的照相机,其特征在于,所述计算单元用于基于由所述第一提取器和所述第二提取器提取的信号中的、信号相位彼此最近的频带中的信号,计算所述校正值。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008183427A JP5094606B2 (ja) | 2008-07-15 | 2008-07-15 | 像振れ補正装置およびそれを備えた光学機器、撮像装置、像振れ補正装置の制御方法 |
| JP2008-183427 | 2008-07-15 | ||
| JP2008183427 | 2008-07-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101630107A CN101630107A (zh) | 2010-01-20 |
| CN101630107B true CN101630107B (zh) | 2011-12-07 |
Family
ID=41529989
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2009101519749A Active CN101630107B (zh) | 2008-07-15 | 2009-07-15 | 图像稳定控制设备和照相机 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US8159545B2 (zh) |
| JP (1) | JP5094606B2 (zh) |
| CN (1) | CN101630107B (zh) |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5274130B2 (ja) | 2008-07-15 | 2013-08-28 | キヤノン株式会社 | 像振れ補正装置及び光学機器、撮像装置並びに像振れ補正装置の制御方法 |
| JP5457013B2 (ja) * | 2008-11-18 | 2014-04-02 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | 振動補償制御回路、及び撮像装置 |
| JP2011146799A (ja) * | 2010-01-12 | 2011-07-28 | Brother Industries Ltd | 画像処理装置及び画像処理プログラム |
| KR101643618B1 (ko) * | 2010-07-28 | 2016-07-29 | 삼성전자주식회사 | 디지털 촬영장치 및 방법 |
| CN102375285A (zh) * | 2010-08-06 | 2012-03-14 | 鸿富锦精密工业(深圳)有限公司 | 防抖动控制装置 |
| JP5181001B2 (ja) * | 2010-08-09 | 2013-04-10 | キヤノン株式会社 | 像振れ補正装置及びその制御方法、及び、像振れ補正装置を搭載した撮像装置及び光学機器 |
| JP5269034B2 (ja) | 2010-10-19 | 2013-08-21 | キヤノン株式会社 | 像振れ補正装置およびその制御方法、光学機器、撮像装置 |
| JP5121911B2 (ja) | 2010-10-19 | 2013-01-16 | キヤノン株式会社 | 防振制御装置、撮像装置、及び防振制御方法 |
| JP5519077B2 (ja) * | 2011-04-12 | 2014-06-11 | 富士フイルム株式会社 | 撮像装置 |
| EP2819394A1 (en) | 2011-06-10 | 2014-12-31 | Canon Kabushiki Kaisha | Shake compensation apparatus, shake compensation control method, and image capturing apparatus and control method thereof |
| JP5868042B2 (ja) | 2011-07-01 | 2016-02-24 | キヤノン株式会社 | 防振制御装置、撮像装置、及び防振制御装置の制御方法 |
| JP5911220B2 (ja) * | 2011-07-01 | 2016-04-27 | キヤノン株式会社 | 撮像装置及び撮像装置の制御方法 |
| JP5913960B2 (ja) | 2011-12-21 | 2016-05-11 | キヤノン株式会社 | 防振制御装置及びその制御方法、及び撮像装置 |
| JP5917133B2 (ja) | 2011-12-22 | 2016-05-11 | キヤノン株式会社 | 防振制御装置、防振制御方法、光学機器、撮像装置 |
| CN103297665A (zh) * | 2012-02-22 | 2013-09-11 | 庄佑华 | 图像采集系统 |
| JP5984467B2 (ja) * | 2012-04-09 | 2016-09-06 | キヤノン株式会社 | 像ブレ補正装置、光学機器、撮像装置、および像ブレ補正装置の制御方法 |
| JP6004785B2 (ja) * | 2012-06-29 | 2016-10-12 | キヤノン株式会社 | 撮像装置、光学機器、撮像システムおよび制御方法 |
| JP6098873B2 (ja) * | 2012-09-04 | 2017-03-22 | パナソニックIpマネジメント株式会社 | 撮像装置および画像処理装置 |
| JP6071545B2 (ja) * | 2012-12-27 | 2017-02-01 | キヤノン株式会社 | 撮像装置、画像処理装置及びその制御方法、プログラム、記憶媒体 |
| JP2014126861A (ja) | 2012-12-27 | 2014-07-07 | Canon Inc | 撮像装置及びその制御方法、プログラム、記憶媒体 |
| JP6091255B2 (ja) * | 2013-02-28 | 2017-03-08 | オリンパス株式会社 | ブレ量検出装置及び撮像装置 |
| WO2014140663A1 (en) | 2013-03-12 | 2014-09-18 | L'oreal | Non-woven face mask and corresponding cosmetic treatment method. |
| JP6074298B2 (ja) * | 2013-03-18 | 2017-02-01 | キヤノン株式会社 | 撮像装置、画像処理装置、及びそれらの制御方法 |
| US9232138B1 (en) * | 2013-06-03 | 2016-01-05 | Amazon Technologies, Inc. | Image stabilization techniques |
| ITTO20130645A1 (it) * | 2013-07-30 | 2015-01-31 | St Microelectronics Srl | Metodo e sistema di calibrazione in tempo reale di un giroscopio |
| JP6150655B2 (ja) | 2013-08-01 | 2017-06-21 | キヤノン株式会社 | 像振れ補正装置およびその制御方法、レンズ鏡筒、光学機器、並びに撮像装置 |
| JP2015034879A (ja) | 2013-08-08 | 2015-02-19 | キヤノン株式会社 | 像振れ補正装置およびその制御方法、レンズ鏡筒、光学機器、並びに撮像装置 |
| US20150103190A1 (en) * | 2013-10-16 | 2015-04-16 | DigitalOptics Corporation Europe Limited | Image acquisition method and apparatus with mems optical image stabilization (ois) |
| KR102163045B1 (ko) * | 2014-02-17 | 2020-10-08 | 삼성전기주식회사 | 이미지 보정 장치 및 그 방법 |
| JP6355428B2 (ja) * | 2014-05-21 | 2018-07-11 | キヤノン株式会社 | 撮像装置 |
| CN104469357B (zh) * | 2014-12-30 | 2016-12-07 | 中国科学院长春光学精密机械与物理研究所 | 微振动对长焦距相机成像质量影响的测试系统 |
| KR102172631B1 (ko) * | 2015-04-24 | 2020-11-03 | 삼성전기주식회사 | 디지털 촬영시스템 및 그 제어방법 |
| JP6614810B2 (ja) | 2015-05-29 | 2019-12-04 | キヤノン株式会社 | ブレ補正装置、撮像装置、ブレ補正方法 |
| KR102349433B1 (ko) * | 2015-11-27 | 2022-01-10 | 삼성전자주식회사 | 자이로스코프 센서를 제어할 수 있는 이미지 센서와 이를 포함하는 장치들 |
| CN106813679B (zh) * | 2015-12-01 | 2021-04-13 | 佳能株式会社 | 运动物体的姿态估计的方法及装置 |
| CN107241544B (zh) * | 2016-03-28 | 2019-11-26 | 展讯通信(天津)有限公司 | 视频稳像方法、装置及摄像终端 |
| CN107295255B (zh) * | 2017-06-21 | 2020-08-04 | 深圳市万普拉斯科技有限公司 | 拍摄模式的确定方法、装置及终端 |
| WO2019226433A1 (en) | 2018-05-21 | 2019-11-28 | Corning Incorporated | Liquid lens control systems and methods with reduced phase delay |
| CN110769147B (zh) * | 2018-07-25 | 2021-09-14 | 北京小米移动软件有限公司 | 拍摄方法及电子设备 |
| JP7191639B2 (ja) * | 2018-10-22 | 2022-12-19 | キヤノン株式会社 | 制御装置、撮像装置、制御方法、および、プログラム |
| CN111093007B (zh) * | 2018-10-23 | 2021-04-06 | 辽宁石油化工大学 | 双足机器人的行走控制方法及装置、存储介质、终端 |
| JP7119905B2 (ja) * | 2018-10-29 | 2022-08-17 | 株式会社ニコン | 演算装置、交換レンズ、カメラボディおよび撮像装置 |
| JP7208822B2 (ja) * | 2019-02-22 | 2023-01-19 | キヤノン株式会社 | 撮像装置及びその制御方法、プログラム、記憶媒体 |
| JP7233260B2 (ja) * | 2019-03-13 | 2023-03-06 | キヤノン株式会社 | 像ブレ補正制御装置及びその制御方法、プログラム、記憶媒体 |
| CN110233969B (zh) * | 2019-06-26 | 2021-03-30 | Oppo广东移动通信有限公司 | 图像处理方法和装置、电子设备、计算机可读存储介质 |
| CN111649816A (zh) * | 2020-05-28 | 2020-09-11 | 长安大学 | 一种基于数字图像识别的结构振型测试系统及方法 |
| CN112161694B (zh) * | 2020-09-21 | 2022-07-05 | 武汉大学 | 高速摄像机自身受环境激振引起误差的测量方法 |
| CN115134522B (zh) * | 2022-05-25 | 2023-09-01 | 安克创新科技股份有限公司 | 摄像头控制方法、装置、存储介质以及终端 |
| CN115567761B (zh) * | 2022-12-07 | 2023-03-31 | 杭州视洞科技有限公司 | 一种无限旋转摄像机的复位方法及电子设备 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3353787B2 (ja) | 1989-11-16 | 2002-12-03 | 株式会社日立製作所 | 定型文書作成支援方法 |
| JPH0722405A (ja) | 1993-06-22 | 1995-01-24 | Nippon Steel Corp | 化学気相成長法およびその装置 |
| JP3513950B2 (ja) * | 1993-12-14 | 2004-03-31 | 株式会社ニコン | 像振れ補正カメラ |
| JPH09105973A (ja) * | 1995-10-12 | 1997-04-22 | Sony Corp | 手振れ補正光学装置 |
| JPH11109432A (ja) * | 1997-09-30 | 1999-04-23 | Nikon Corp | ブレ補正装置 |
| US6781622B1 (en) * | 1998-06-26 | 2004-08-24 | Ricoh Company, Ltd. | Apparatus for correction based upon detecting a camera shaking |
| US7554578B2 (en) * | 2000-07-11 | 2009-06-30 | Phase One A/S | Digital camera with integrated accelerometers |
| JP2002359769A (ja) | 2001-05-31 | 2002-12-13 | Canon Inc | 手振れ補正装置および手振れ補正方法 |
| JP3646124B2 (ja) * | 2001-10-01 | 2005-05-11 | コニカミノルタフォトイメージング株式会社 | オートフォーカス装置 |
| JP4717651B2 (ja) * | 2006-02-07 | 2011-07-06 | キヤノン株式会社 | 像振れ補正装置および撮像装置 |
| US7920780B2 (en) * | 2008-04-16 | 2011-04-05 | Canon Kabushiki Kaisha | Image stabilization apparatus, imaging apparatus, and optical apparatus |
| JP5230398B2 (ja) * | 2008-12-19 | 2013-07-10 | キヤノン株式会社 | 撮像装置及びその制御方法 |
| JP5463583B2 (ja) * | 2009-07-14 | 2014-04-09 | 株式会社タムロン | 防振アクチュエータ、及びそれを備えたレンズユニット、カメラ |
| JP2012108399A (ja) * | 2010-11-19 | 2012-06-07 | Tamron Co Ltd | 防振アクチュエータ、及びそれを備えたレンズユニット、カメラ |
-
2008
- 2008-07-15 JP JP2008183427A patent/JP5094606B2/ja active Active
-
2009
- 2009-07-14 US US12/502,421 patent/US8159545B2/en active Active
- 2009-07-15 CN CN2009101519749A patent/CN101630107B/zh active Active
-
2012
- 2012-03-13 US US13/419,348 patent/US8305455B2/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US8159545B2 (en) | 2012-04-17 |
| US8305455B2 (en) | 2012-11-06 |
| JP5094606B2 (ja) | 2012-12-12 |
| US20120169891A1 (en) | 2012-07-05 |
| US20100013937A1 (en) | 2010-01-21 |
| JP2010025962A (ja) | 2010-02-04 |
| CN101630107A (zh) | 2010-01-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101630107B (zh) | 图像稳定控制设备和照相机 | |
| CN101630108B (zh) | 图像稳定控制设备和摄像设备 | |
| CN102099737B (zh) | 图像稳定控制设备及其控制方法和摄像设备 | |
| US6757488B2 (en) | Control apparatus for image blur correction | |
| JP2010286721A (ja) | 光学機器 | |
| JP5235542B2 (ja) | 像振れ補正装置またはそれを備えたレンズ装置、撮像装置並びに像振れ補正装置の制御方法 | |
| JP5693656B2 (ja) | 像振れ補正装置およびそれを備えた光学機器、撮像装置、像振れ補正装置の制御方法 | |
| JP5420042B2 (ja) | 像振れ補正装置及びそれを具備する光学機器、撮像装置、ならびに像振れ補正装置の制御方法 | |
| JP5207861B2 (ja) | 像振れ補正装置およびそれを具備する撮像装置、光学機器、ならびに像振れ補正装置の制御方法 | |
| JP5496268B2 (ja) | 光学機器又は撮像装置並びに光学機器の制御方法 | |
| JPH02126252A (ja) | カメラ用手振れ表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |