CN100590449C - 雷达装置 - Google Patents
雷达装置 Download PDFInfo
- Publication number
- CN100590449C CN100590449C CN200510056019A CN200510056019A CN100590449C CN 100590449 C CN100590449 C CN 100590449C CN 200510056019 A CN200510056019 A CN 200510056019A CN 200510056019 A CN200510056019 A CN 200510056019A CN 100590449 C CN100590449 C CN 100590449C
- Authority
- CN
- China
- Prior art keywords
- signal
- radar installations
- unit
- antenna
- target object
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60C—VEHICLE TYRES; TYRE INFLATION; TYRE CHANGING; CONNECTING VALVES TO INFLATABLE ELASTIC BODIES IN GENERAL; DEVICES OR ARRANGEMENTS RELATED TO TYRES
- B60C19/00—Tyre parts or constructions not otherwise provided for
- B60C19/12—Puncture preventing arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
- G01S13/44—Monopulse radar, i.e. simultaneous lobing
- G01S13/4454—Monopulse radar, i.e. simultaneous lobing phase comparisons monopulse, i.e. comparing the echo signals received by an interferometric antenna arrangement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/341—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal wherein the rate of change of the transmitted frequency is adjusted to give a beat of predetermined constant frequency, e.g. by adjusting the amplitude or frequency of the frequency-modulating signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/345—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using triangular modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
- G01S13/44—Monopulse radar, i.e. simultaneous lobing
- G01S13/4463—Monopulse radar, i.e. simultaneous lobing using phased arrays
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/35—Details of non-pulse systems
- G01S7/352—Receivers
- G01S7/354—Extracting wanted echo-signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/35—Details of non-pulse systems
- G01S7/352—Receivers
- G01S7/356—Receivers involving particularities of FFT processing
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Signal Processing (AREA)
- Mechanical Engineering (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
一种雷达装置,包括:将向空间发射、由目标物体反射的电波,作为接收信号接收的由多个天线元件构成的接收天线(12);根据将由接收天线(12)输出的接收信号下降成所定的频带的模拟信号变换的数字信号,检出到达目标物体的距离、目标物体的速度及方位的信号处理部(20);信号处理部(20),进行根据将接收天线(12)的多个天线元件的一部分输出作为处理单位的第1处理单位和与将接收天线(12)的多个天线元件的一部分输出作为处理单位的第1处理单位不同的第2处理单位的输出的处理。即使在搭载上有制约时,也能实现大范围的雷达处理。
Description
技术领域
本发明涉及一种雷达装置,特别涉及一种具有由多个天线元件构成的接收天线、用数字处理形成天线射束的数字射束形成(DBF:Digital BeamForming型)型的雷达装置。
背景技术
近几年来,具有由多个天线元件构成阵列天线、用信号处理部的数字处理形成天线射束的DBF型的雷达装置,引人注目。
在该雷达装置中,构成阵列天线的各天线元件与RF放大器、混频器、滤波器、A/D变换器连接,将由各自的A/D变换器输出的数字信号,输入数字射束形成处理器,进行数字射束形成处理。
其中,有的文献公开了限制各天线元件附带的昂贵的高频模拟器件的数量,从而在抑制制造成本上升的同时,还将防止装置的大型化/复杂化作为目的的DBF型的雷达装置(例如专利文献1、2等)。
另外,还有的文献公开了在构成平面阵列天线的天线元件中,在由奇数列的天线元件和偶数列的天线元件形成的2系统的天线元件中,使构成这些阵列天线的各天线元件,具有互相构成梳状的梳齿地排列的平面阵列天线的单脉冲雷达装置(例如专利文献3等)。在该单脉冲雷达装置中,即使天线元件数量增加时,也能够使2个天线元件的相位中心间隔在λ以下,从而在提高天线增益的同时,还防止起因于相位差检出之际的相位折叠的含糊(模糊性)的增大。
另一方面,在现有技术的模拟处理型的雷达装置中,公开了许多使用相位比较单脉冲方式的雷达装置的示例。其中,有利用使用多个发射天线的发射射束切换产生的接收信号的振幅变化等,进行大范围的目标探测及多个目标识别等的雷达装置(例如专利文献4等)。
[专利文献1]特开平11-160432号公报
[专利文献2]特开平11-064485号公报
[专利文献3]特开平09-162626号公报
[专利文献4]特开平11-281729号公报
可是,上述专利文献1、2所示的雷达装置,为了削减制造成本,防止装置的大型化/复杂化,而通过省略现有技术的DBF型的雷达装置一部分必须的构成要素的做法,很难说能够充分发挥DBF型的雷达具有的长处。
另外,在这些雷达装置中,旨在限制高频模拟器件的数量,没有考虑天线系统。作为现实的问题,天线元件的数量,在实际安装时受到的限制,比高频模拟器件的数量受到的限制多,例如,在搭载的平台存在空间性的制约时,就会产生必须削减天线元件的问题。
另外,上述专利文献3所示的雷达装置,需要将构成阵列天线的各天线元件,按照各阵列天线交替(梳齿状)地搭配,从天线元件本身的大小(通常为λ/2左右)及避免天线元件间结合的影响的角度上说,难以缩短构成阵列天线的天线元件的元件间隔(例如λ以下)。这样,在该雷达装置具备的阵列天线中,即使能够将2个阵列天线的相位中心间隔设置成λ以下,构成阵列天线本身的天线元件间隔也在λ以上,存在着不能有效地抑制起因于阵列天线本身的天线波瓣而产生目标方位的含糊的范围的缺点。
另外在该雷达装置中,一个天线元件,只属于某个阵列天线,不存在在不同的阵列天线间反复使用天线元件的输出这种DBF处理的概念,所以难以将形成阵列天线的天线元件集约配置,在搭载的平台存在空间性的制约时,就出现必须削减天线元件数量的问题。
并且,该雷达装置,几乎没有控制各阵列天线的射束宽度及射束方位的自由度,所以存在难以进行限定搜索区或大约同时搜索多个搜索区的自由度高的单脉冲处理的缺点。
另外,在上述专利文献4所示的雷达装置中,虽然通过切换使用多个发送天线的发送射束,实现了相位比较单脉冲处理,但却存在需要很多搭载发送天线的空间,在搭载发送天线的平台存在空间制约时,就不能实现系统的问题。
发明内容
本发明就是有鉴于此而研制的,目的在于提供即使在搭载上有制约时,也能实现大范围的雷达处理的雷达装置。
为了解决上述课题,达到目的,本发明的本发明之1涉及的雷达装置,其特征在于,
包括:
将发送信号作为电波向空间发射的发送部;
将所述电波到达目标物体后由该目标物体反射的电波,作为接收信号接收的由多个天线元件构成的接收天线;
将由所述接收天线输出的接收信号被下降变换成所定的频带的模拟信号变换成数字信号后输出的接收部;
根据所述接收部输出的数字信号,检出所述目标物体的方位的信号处理部;
在所述信号处理部,根据将所述接收天线的多个天线元件的一部分输出作为处理单位的第1处理单位和与将该接收天线的多个天线元件的一部分输出作为处理单位的该第1处理单位不同的第2处理单位的输出,进行所定的处理。
采用本发明后,发送部将发送信号作为电波向空间发射;由多个天线元件构成的接收天线,将到达目标物体后由该目标物体反射的电波,作为接收信号接收;接收部将由该接收天线输出的接收信号下降变换成所定的频带的模拟信号变换成数字信号后输出;信号处理部对接收部输出的数字信号实施所定的处理,检出到达目标物体的距离、目标物体的速度及方位。另外,该信号处理部,通过进行根据将接收天线的多个天线元件的一部分输出作为处理单位的第1处理单位和与将该接收天线的多个天线元件的一部分输出作为处理单位的该第1处理单位不同的第2处理单位的输出的单脉冲处理,可以充分发挥DBF型的雷达装置具有的特征,使用DBF方式实现大范围的雷达处理,另外还放宽对天线系统而言的搭载上制约。
此外,这里所谓的“发送部”,是具有发送天线、振荡器、调制器等的部件。同样,接收部是具有放大器、混频器、滤波器、A/D变换器等的部件。
另外,本发明的本发明之2涉及的雷达装置,其特征在于:在上述发明中,所述所定的处理,是单脉冲处理。
另外,本发明的本发明之3涉及的雷达装置,其特征在于:在上述发明中,所述单脉冲处理,是相位比较单脉冲处理。
另外,本发明的本发明之4涉及的雷达装置,其特征在于:在上述发明中,所述单脉冲处理,是振幅比较单脉冲处理。
另外,本发明的本发明之5涉及的雷达装置,其特征在于:在上述发明中,所述第1处理单位,将从所述接收天线的多个天线元件抽出所定的抽出数的天线元件各自的输出,作为处理单位;所述第2处理单位,将从构成所述第1处理单位的天线元件偏移所定的偏移数的天线元件开始,抽出所述所定的抽出数的天线元件各自的输出,作为处理单位。
另外,本发明的本发明之6涉及的雷达装置,其特征在于:在上述发明中,将所述接收天线的天线元件数作为N时,所述所定的偏移数是1。
另外,本发明的本发明之7涉及的雷达装置,其特征在于:在上述发明中,所述所定的抽出数是N-1。
另外,本发明的本发明之8涉及的雷达装置,其特征在于:在上述发明中,将所述第1处理单位和所述第2处理单位作为一组的单脉冲处理单位时,具有多个该一组的单脉冲处理单位。
另外,本发明的本发明之9涉及的雷达装置,其特征在于:在上述发明中,所述信号处理部,将由所述单脉冲处理进行的检出范围,限定在所定的范围内。
另外,本发明的本发明之10涉及的雷达装置,其特征在于:在上述发明中,所述信号处理部,在断定有可能存在多个目标时,一并采用所定的高分辨处理。
另外,本发明的本发明之11涉及的雷达装置,其特征在于:在上述发明中,作为所述所定的高分辨处理,采用MUSIC(Multiple SignalClassification)法。
另外,本发明的本发明之12涉及的雷达装置,其特征在于:在上述发明中,所述信号处理部,预先处理所述第1处理单位的运算处理和所述第2处理单位的运算处理中共同的处理。
另外,本发明的本发明之13涉及的雷达装置,其特征在于:在上述发明中,所述发送部,还具有根据所述信号处理部的控制,可变控制旨在调制所述发送信号的调制用信号的所定参数的调制控制部。
另外,本发明的本发明之14涉及的雷达装置,其特征在于:在上述发明中,所述发送信号,是FM-CW信号。
另外,本发明的本发明之15涉及的雷达装置,其特征在于:在上述发明中,所述调制控制部,使调制用信号的频率偏移量及/或反复周期可变。
采用本发明涉及的雷达装置后,作为进行雷达处理的2个接收天线,构成由所定的元件数的天线元件构成的子阵列1,和由从构成子阵列1的元件组偏移所定的偏移数的元件开始的所定的抽出数的天线元件构成的子阵列2,所以具有能够实现使用DBF方式的大范围的雷达处理的效果。
附图说明
图1是表示本发明涉及的雷达装置的第1实施方式的结构的方框图。
图2是表示相位比较单脉冲方式的方位检出原理的图形。
图3是讲述第1实施方式的信号处理的特点的示意图。
图4是表示将图3所示的接收天线系统作为被各处理单位的子阵列结构时的等值结构的图形。
图5是表示图4所示的2元件阵列天线的阵列因子的图形。
图6是表示现有技术的相控阵列天线雷达的基本结构的图形。
图7是为了讲述第2实施方式的在DBF雷达装置中应用的振幅比较单脉冲处理的概念而绘制的图形。
图8是表示本发明涉及的雷达装置的第3实施方式的结构的方框图。
图9-1是表示FM-CW雷达装置中发送波及接收波的信号波形(相对速度=0)的图形。
图9-2是表示FM-CW雷达装置中发送波及接收波的差拍频率(相对速度=0)的图形。
图10-1是表示FM-CW雷达装置中发送波及接收波的信号波形(相对速度=v)的图形。
图10-2是表示FM-CW雷达装置中发送波及接收波的差拍频率(相对速度=v)的图形。
图11是为了讲述由调制器向振荡器输出的调制用信号而绘制的图形。
具体实施方式
下面,根据附图,详细讲述本发明涉及的雷达装置的实施方式。此外,本发明不受该实施方式的限定。
(第1实施方式)
图1是表示本发明涉及的雷达装置的第1实施方式的结构的方框图。该图所示的雷达装置,在发送系统中,包括:发送天线11,振荡器14,调制器15。另一方面,在接收系统中,包括:多个接收天线12(121,122,…,12N);分别与接收天线12连接的放大器16(161,162,…,16N);根据振荡器14供给的信号(本地信号),对这些放大器16输出的各信号(接收信号)进行下降变换的混频器17(171,172,…,17N);分别与这些混频器17连接,对下降变换后的信号加以带宽限制的滤波器18(181,182,…,18N);分别与这些滤波器18连接,对带宽限制后的信号进行模拟-数字变换的A/D变换器19(191,192,…,19N);根据A/D变换器19输出的数字信号,进行信号处理的信号处理部20。此外,本发明的特点在于,在信号处理部20中进行的相位比较单脉冲处理。对此,将在后文详述。
在这里,讲述本发明的雷达装置适用的DBF技术的概念。直截了当地说,DBF技术是将用多个天线元件构成的阵列天线接收的信号,经过A/D变换后,输入信号处理部,用数字处理部实现射束形成、射束扫描、旁瓣抑止等天线特性的控制的技术。为了理解该DBF技术,理解现有技术的相控阵列天线雷达的原理,是其捷径。因此,首先讲述相控阵列天线雷达。
图6是表示现有技术的相控阵列天线雷达的基本结构的图形。在该图中,该雷达的对于接收天线阵列而言的法线轴(图中的虚线)方向,用以间隔d0排列的N个接收天线接收与从到达角θ的方向射入的电波时,如果将电波对于接收天线1021而言的传播路径长作为基准,那么对于接收天线1021、1022、…、102N而言的各传播路径长就如图所示,分别增加d0Sinθ、2d0Sinθ、…、(N-1)d0Sinθ。这样,到达接收天线1021、1022、…、102N的电波的相位,就比到达接收天线1021的电波的相位滞后该各传播路径长。
如果设电波的波长为λ,那么这时的相位差(相位滞后)就分别为(2π/λ)d0Sinθ、(2π/λ)·2d0Sinθ、…、(2π/λ)·(N-1)d0Sinθ。用设置在各接收天线的后级的移相器106(1061,1062,…,106N)使相位向与上述相位差相反的方向提前,就可以用各接收天线102将来自θ方向的电波合成成等相位,指向性朝着θ方向。以后的信号处理,与机械式扫描雷达一样,经过移相器106的接收信号用放大器107进行放大,用混频器108与发送信号混频,进行下降变换。下降变换后的信号,输入信号处理部109后进行处理,最终输出有关距离/速度/方位的信息。采用这种相控阵列天线雷达后,可以通过适当控制移相器106的移相量,在将接收天线102固定的状态下得到任意方向的指向性。
与此不同,DBF雷达的普通结构,是前文图1所示的第1实施方式的雷达装置。该雷达装置,用数字信号处理,实现相控阵列天线雷达的移相器的功能。
下面,使用图1,讲述该实施方式的雷达装置的动作。在该图中,根据来自调制器15的调制信号,用振荡器14生成发送信号,并由发送天线11向空间发射。另一方面,来自目标等的反射信号,用多个接收天线12分别接收。这些接收信号,用放大器16分别放大,向混频器17输出。在混频器17中,根据振荡器14供给的信号(本地信号)对放大器16输出的接收信号进行下降变换。在滤波器18中,给各混频器17输出的下降变换信号加以带宽限制,再用A/D变换器19由模拟信号变换成数字信号后,向信号处理部20输出。
在信号处理部20中,由于能够自由改变相位和振幅,所以用所定的规则调整各个元件的接收天线接收的数字信号的振幅、相位后进行信号合成,从而可以形成任意的方向或任意的形状的天线指向性。将在信号处理部中进行的这种天线指向性合成处理,称作“数字射束形成(DBF)”。
DBF的一大特点,是一旦将全部接收天线接收的信号作为数字信号输入后,就可以根据该数字信号合成任意方向的射束。就是说,输入一次信号后,就能够形成多个射束。在本发明中,也最大限度地利用了该特点。
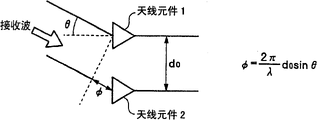
图2是表示相位比较单脉冲方式的方位检出原理的图形。在该图中,接收波以与天线面的法线方向构成θ的角度射入接收天线1及接收天线2时,在接收天线1的接收信号和接收天线2的接收信号之间,产生φ=(2π/λ)·d0Sinθ的相位差。这样,在相位比较单脉冲方式中,检出该相位差φ后,就可以根据θ=Sin-1(φλ/2πd0)的公式,检出电波的到达角θ。
图3是讲述第1实施方式信号处理的特点的示意图。在该图中,示出与多个接收天线12构成的等间隔的线性阵列连接的信号处理部20。此外,对分别与接收天线12连接的放大器16、混频器17、滤波器18、A/D变换器19,均未图示。
在图3中,信号处理部20进行根据被编成处理单位1和处理单位2的2个处理单位的信号处理。在处理单位1中,合成处理121~12N-1的N-1个元件的接收天线的输出。另一方面,在处理单位2中,对成为处理单位1的对象的接收天线的组,合成处理向下方一个个地偏移的122~12N的N一1个元件的接收天线的输出。这样,处理单位1用121~12N-1的N-1个元件的接收天线阵列(子阵列1)构成,处理单位2用122~12N的N-1个元件的接收天线阵列(子阵列2)构成。此外,这些处理单位1及处理单位2,分别与图2的接收天线1及接收天线2对应。
图4是表示将图3所示的接收天线系统作为被各处理单位的子阵列结构时的等值结构的图形。向图3所示的下方只偏移1个元件的子阵列结构,如果将子阵列视为天线元件,那么就如图4所示,与将各自的元件作为子阵列的2元件的阵列天线结构等值,另外,这些子阵列之间(子阵列1及子阵列2)的间隔,与各天线元件的元件间隔d0(最小间隔)相等。
此外,将子阵列1和子阵列2之间的间隔与波长相比,设定得过于大时,在子阵列1和子阵列2之间的相位差上就产生混淆,在相位的周围超前,难以检出正确的相位差。这个问题,与将子阵列作为1个元件的2元件阵列天线的射束波瓣的问题相同,能够置换成不使该射束波瓣产生零位。
图5是表示图4所示的2元件阵列天线的阵列因子的图形。如该图所示,对于到达角θ而言,元件间隔为0.5λ(λ:波长)时,成为平缓地减少的射束波瓣,而在元件间隔为2λ时,在15度附近及50度附近,产生较大的零位(null)。由于随着元件间隔变大,该零位向法线方向(0度方向)移动,所以元件间隔尽可能地设定得小一些,是很重要的。
可是,像现有技术那样,要想用天线系统实现上述的子阵列结构,就必须增加接收天线本身的数量,还存在要增加配置的天线,与现有的天线的一部分重叠,不能有效地配置的问题。可是,本实施方式的雷达装置,是使天线系统的结构不变,利用信号处理部的功能实现该子阵列结构。就是说,将用接收天线接收的信号,作为数字信号输入信号处理部后,通过反复使用一部分数字信号,实现与上述子阵列结构等效的结构。利用该子阵列结构,可以增大实质上的接收开口长,增加接收增益。另外,还能够提高探知性能。
另外,由于能够同时反复使用先输入的接收信号,所以能够同时形成多条接收射束,不必象现有技术那样,采用切换多个发送天线的结构,能够妥善解决搭载空间的问题。
并且,在本实施方式的雷达装置中,构成子阵列1的天线元件的接收信号,和构成子阵列2的天线元件的接收信号,被共用,而且被反复使用,所以预先求出相同运算部分,反复利用其运算结果,就能够提高信号处理部的处理效率。
一般,在单脉冲测角中,同一条射束内存在多个目标时,接收波成为来自多个目标的反射波的合成波,对于多个目标难以分离这些目标,分别检测出其正确的方向。可是,在本实施方式的雷达装置中,由于在DBF型的雷达装置中,采用相位比较单脉冲处理,所以如前所述,先输入接收信号后,能够进行适当的信号处理,所以还能解决这个问题。就是说,在断定有可能存在多个目标时,只要同时采用MUSIC(Multiple SignalClassification)法等高分辨能处理,就能够解决上述问题。
此外,通常,MUSIC法等高分辨能处理计算处理量多,难以迅速输出处理结果。可是,在本实施方式的雷达装置中,并非经常进行根据MUSIC法的处理,而能够只在断定需要高分辨能处理时,才应用该处理,另外,检测范围也被限定在所定的范围内,所以计算处理量也被削减,能够在处理时间上不成问题地有效地进行多个目标检出。
综上所述,作为进行相位比较单脉冲处理的2个接收天线,构成由所定的元件数的天线元件形成的子阵列1,和从构成子阵列1的元件组偏移所定的偏移数的元件起始的所定的抽出数的天线元件形成的子阵列2,所以能够实现使用DBF方式的大范围的相位比较单脉冲处理。
此外,在本实施方式的雷达装置中,作为子阵列1及子阵列2,对进行相位比较单脉冲处理、构成图4所示的2个子阵列的情况进行了讲述,但并不局限于这种结构。例如,还可以将天线元件隔一个交替组合。
另外,还可以将进行相位比较单脉冲处理的2个子阵列做才多个。即:可以构成2个以上的进行相位比较单脉冲处理的子阵列。例如:利用这种多个2个子阵列,可以进行检测范围不同的多个相位比较单脉冲处理,还可以根据多个相位比较单脉冲处理的结果,分离、识别多个目标。
此外,本实施方式讲述的处理技术,没有依赖雷达装置的种类的要素,可以在脉冲多普勒雷达装置及FM-CW雷达装置等各种雷达装置上应用。
(第2实施方式)
图7是为了讲述第2实施方式的在DBF雷达装置中应用的振幅比较单脉冲处理的概念而绘制的图形。此外,第2实施方式的雷达装置的结构,与图1所示的第1实施方式的雷达装置的结构相同。在图1的雷达装置的信号处理部20中,如图7所示,能够很容易地形成使子阵列1的接收射束32和子阵列2的接收射束33部分重叠的射束。形成这种射束后,通常只要按照被人们熟知的振幅比较单脉冲处理的步骤进行检测处理就行。
此外,在本实施方式的雷达装置中,也和第1实施方式一样,能够采取各种子阵列结构以及各种处理形态,它们分别都能获得与第1实施方式相同的效果。
(第3实施方式)
图8是表示本发明涉及的雷达装置的第3实施方式的结构的方框图。该图所示的雷达装置,在图1所示第1实施方式的结构中,在调制器15和信号处理部20之间,具有调制控制部22。此外,其它结构与第1实施方式相同或相等,对于这些部分,赋予相同的符号。
在雷达装置中,在目标物体的方向存在固定物及中远距离的目标等时,或者在目标物体以外的方向存在强烈的杂音源等时,如果不用滤波器18除去这些信号,就往往回误检出检出对象以外的信号。因此,在本实施方式的雷达装置中,调制控制部22根据信号处理部20的控制,对调制器15输出的调制用信号的各种参数进行可变控制。在这里,所谓“调制用信号的各种参数”,例如如果是FM-CW雷达装置,就是调制用信号的频率偏移量及反复周期等;如果是脉冲多普勒雷达装置,则是调制用信号的脉冲反复周期及脉冲宽度等。
下面,以FM-CW雷达装置为例,讲述第3实施方式的雷达装置的动作。在讲述之际,首先讲述FM-CW雷达装置的原理。
在FM-CW雷达装置中,利用振荡器产生的例如数百Hz的三角波等发送FM调制的FM调制波,接收来自目标物体的反射信号后,将FM调制波作为本地信号,对接收信号进行FM检波。来自目标物体的反射波,按照雷达与目标物体之间的距离,还按照相对速度造成的多普勒频移,与发送信号产生偏移(差拍,beat)。这样,可以根据频率的偏移,计测到与目标物体的距离和相对速度。在FM-CW雷达装置中,作为调制用信号,大多用三角波,以下对作为调制用信号使用三角波的情况进行讲述。但除了三角波外,还可以使用锯齿波、梯形波等三角波以外的调制信号。
图9是为了讲述与目标物体的相对速度为“0”时的FM-CW雷达装置的原理而绘制的图形。图9-1是表示发送波及接收波的信号波形的图形,图9-2是表示发送波及接收波的差拍频率的图形。在图9-1中,发送波的波形是三角波,频率如实线所示地变化。另外,发送波的发送中心频率是f0,FM调制宽度是Δf,反复频率是fm。该发送波被目标物体反射后用天线接收,成为该图虚线所示的接收波。设到目标物体的距离为R、电流的传播速度为C,与目标物体之间的电波的往返时间T即为T=2R/C。该接收波,按照雷达与目标物体间的距离,产生与发送信号的频率的偏移(差拍)。这时,该差拍频率成分fb,可用下式表示:
fb=fr=(4·Δf·fm/C)R …(1)
另一方面,图10是为了讲述与目标物体的相对速度为“v”时的FM-CW雷达装置的原理而绘制的图形。图10-1是表示发送波及接收波的信号波形的图形,图10-2是表示发送波及接收波的差拍频率的图形。在图10-1中,发送波的频率如实线所示地变化。该发送波被目标物体反射后用天线接收,成为该图虚线所示的接收波。该接收波,按照雷达与目标物体间的距离,产生与发送信号的频率的偏移(差拍)。这时,由于在雷达与目标物体之间有相对速度为v,所以在频率成分中产生多普勒频移,差拍频率成分fb,按照下式变化:
fb=fr±fd=(4·Δf·fm/C)R+(2·fo/C)v …(2)
在式(1)、式(2)中,各符号的意义如下:
fb:收发差拍频率,fr:距离频率,fd:速度频率,fo:发送波的中心频率,Δf:频率偏移量,fm:调制波的反复频率,C:光速(电波的速度),T:电波到目标物体的往返时间,R:到目标物体的距离,v:与目标物体的相对速度。
此外,在信号处理部20中,对式(2)所示的差拍信号,进行FFD变换等信号处理,求出距离及相对速度等。
下面,讲述用图8所示的调制控制部22的控制,对由调制器15向振荡器14输出的调制用信号进行可变控制的情况。图11是为了讲述该调制用信号而绘制的图形。
首先,讲述可变控制调制用信号的频率偏移量Δf的情况。正如在图9-1及图9-2的讲述中所述,与目标物体的相对速度为0时,目标物体反射后用天线接受的接收波,按照雷达和目标物体间的距离,产生与发送信号的频率偏移(差拍)。该差拍频率成分fb,可以用前文讲述的式(1)表示。在这里,再次列出式(1):
fb=fr=(4·Δf·fm/C)R …(1)
在式(1)中,如果注目于Δf,它表示FM调制的频率偏移量。图11(b)是表示作为调制用信号,将具有通常的频率偏移量(相当于Δf)的三角波(图11(a))为基准时,使该频率偏移量变成2倍时的三角波的图形。
在图8所示的雷达装置中,由调制控制部22控制调制器15,使调制用信号的频率偏移量Δf变成为n倍时,由式(1)可知:差拍频率成分fb的值成为n倍。在接收信号中,出现来自目标物体的信号fb和杂波成分。于是,来自目标物体的信号的频率fb,按照Δf的变化,变成n倍。另一方面,由于杂波成分的频率成分不变,所以能够识别来自目标物体的信号和杂波成分。此外,这些识别处理,用信号处理部20进行。
接着,讲述可变控制调制用信号的调制周期的情况。图11(c)是表示作为调制用信号,将具有图11(a)的频率偏移量(相当于Δf)的三角波作为基准时,使该反复周期变成n倍时的三角波的图形。由式(1)可知:使调制用信号的反复周期Tm成为n倍后,差拍频率成分fb就成为1/n。
在图8所示的雷达装置中,由调制控制部22控制调制器15,使调制用信号的反复周期变成为n倍时,差拍频率成分fb的值就成为1/n。这样,由调制控制部22控制调制器15,使三角波的反复周期Tm成为n倍后,来自目标物体的信号的频率fb,就按照Tm的变化,变成1/n倍。另一方面,不使杂波成分的频率成分变化,所以能够识别来自目标物体的信号和杂波成分。此外,这些识别处理,也用信号处理部20进行。
另外,在与目标物体之间的相对速度为v时的差拍频率成分fb,也可以用前文讲述的式(2)表示。对式(2)也再次列出:
fb=fr±fd=(4·Δf·fm/C)R+(2·fo/C)v …(2)
与目标物体之间的相对速度为v时,也由式(2)可知:通过控制频率偏移量Δf及反复周期Tm,能够识别来自目标物体的信号和杂波成分。此外,毫无疑问,控制频率偏移量Δf或反复周期Tm,与控制调制用信号的斜率是等值的。
此外,上述控制处理,和第1、第2实施方式一样,不需要经常进行。例如,可以在断定检出对象范围内有可能存在多个目标时,应用该控制处理。进行这种控制处理,由于检出范围受到限定,对计算处理而言的负荷也得到减轻,所以能够缩短处理时间,有效地进行多个目标的检出。
综上所述,采用本实施方式的雷达装置后,通过使调制用信号的斜率例如频率偏移量及/或反复周期变化,通过识别按照这些变化而变动的成分,从而识别是不是目标物体和其它信号。
此外,在本实施方式的雷达装置中,以FM-CW雷达装置为例,讲述了为了识别是不是上述目标物体和其它信号而进行的处理。但是,例如也可以适用于脉冲多普勒雷达装置等。这时,只要控制调制用信号的脉冲反复频率及脉冲宽度等即可。
总而言之,本发明涉及的雷达装置,作为检出移动物体的距离、速度、方法的雷达装置,大有用处,特别适用于搭载到对天线系统有空间性制约的平台等时。
Claims (13)
1、一种雷达装置,其特征在于,
包括:
将发送信号作为电波向空间发射的发送部;
将所述电波到达目标物体后由该目标物体反射的电波,作为接收信号接收的由N多个天线元件构成的接收天线;
将由所述接收天线输出的接收信号下降变换到更低的频带,并变换成数字信号后输出的接收部;以及
根据所述接收部输出的数字信号,检出所述目标物体的方位的信号处理部,
在所述信号处理部中,根据第1处理单位与第2处理单位之间的相位差,进行相位比较单脉冲处理,所述第1处理单位将所述接收天线的N多个天线元件中一部分的输出作为处理单位,而所述第2处理单位不同于将所述接收天线的N多个天线元件中一部分的输出作为处理单位的所述第1处理单位,并且所述第1处理单位中包含的天线元件的一部分也包含于所述第2处理单位中。
2、如权利要求1所述的雷达装置,其特征在于:所述第1处理单位,将从所述接收天线的N多个天线元件抽出规定的抽出数的天线元件各自的输出,作为处理单位;
所述第2处理单位,将从构成所述第1处理单位的天线元件偏移规定的偏移数的天线元件开始,抽出所述规定的抽出数的天线元件各自的输出,作为处理单位。
3、如权利要求2所述的雷达装置,其特征在于:所述规定的偏移数是1。
4、如权利要求3所述的雷达装置,其特征在于:所述规定的抽出数是N-1。
5、如权利要求1~3任一项所述的雷达装置,其特征在于:将所述第1处理单位和所述第2处理单位作为一组的单脉冲处理单位时,所述一组的单脉冲处理单位具有多个。
6、如权利要求1~4任一项所述的雷达装置,其特征在于:所述信号处理部,将由所述单脉冲处理进行的检出范围,限定在规定的范围内。
7、如权利要求1~4任一项所述的雷达装置,其特征在于:所述信号处理部,在断定有可能存在多个目标时,对所述数字信号一并采用规定的高分辨处理。
8、如权利要求7所述的雷达装置,其特征在于:作为所述规定的高分辨处理,采用MUSIC法。
9、如权利要求2~4任一项所述的雷达装置,其特征在于:所述信号处理部,预先处理所述第1处理单位的运算处理和所述第2处理单位的运算处理中共同的处理。
10、如权利要求1~4任一项所述的雷达装置,其特征在于:所述发送部,还具有调制控制部,该调制控制部根据所述信号处理部的控制,使旨在调制所述发送信号的调制用信号可变。
11、如权利要求1所述的雷达装置,其特征在于:所述发送信号,是FM-CW信号。
12、如权利要求10所述的雷达装置,其特征在于:所述发送信号,是FM-CW信号。
13、如权利要求10所述的雷达装置,其特征在于:所述调制控制部,使所述调制用信号的频率偏移量及/或反复周期可变。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004082627 | 2004-03-22 | ||
| JP2004082627A JP4447946B2 (ja) | 2004-03-22 | 2004-03-22 | レーダ装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1673770A CN1673770A (zh) | 2005-09-28 |
| CN100590449C true CN100590449C (zh) | 2010-02-17 |
Family
ID=34858372
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200510056019A Expired - Fee Related CN100590449C (zh) | 2004-03-22 | 2005-03-22 | 雷达装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7190305B2 (zh) |
| EP (1) | EP1580572A1 (zh) |
| JP (1) | JP4447946B2 (zh) |
| KR (1) | KR100749560B1 (zh) |
| CN (1) | CN100590449C (zh) |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4447946B2 (ja) * | 2004-03-22 | 2010-04-07 | 富士通テン株式会社 | レーダ装置 |
| DE102004059915A1 (de) * | 2004-12-13 | 2006-06-14 | Robert Bosch Gmbh | Radarsystem |
| JP4098318B2 (ja) * | 2005-03-29 | 2008-06-11 | 本田技研工業株式会社 | 電子走査型ミリ波レーダ装置およびコンピュータプログラム |
| JP4902985B2 (ja) * | 2005-11-15 | 2012-03-21 | 富士通テン株式会社 | モノパルス方式レーダ装置のキャリブレーション方法及びキャリブレーション判定装置 |
| DE102005060875A1 (de) * | 2005-12-20 | 2007-06-21 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Signalverarbeitung bei einer Winkelbestimmung mittels Mikrowellen-Bewegungssensoren |
| DE102006054721A1 (de) * | 2006-03-31 | 2007-11-29 | Volkswagen Ag | Vorrichtung und Verfahren zur Erfassung eines oder mehrerer Objekte in der Umgebung eines Fahrzeuges |
| KR100750967B1 (ko) * | 2006-05-02 | 2007-08-22 | 한국전기연구원 | 가상 배열형 안테나 시스템 기반의 근거리 고해상도 차량용레이더 시스템 |
| DE102007038513A1 (de) | 2007-08-16 | 2009-02-19 | Robert Bosch Gmbh | Monostatischer Mehrstrahlradarsensor für Kraftfahrzeuge |
| JP4656124B2 (ja) * | 2007-11-09 | 2011-03-23 | 株式会社デンソー | 方位検出装置 |
| CN101482609B (zh) * | 2008-03-05 | 2013-11-20 | 中国科学院嘉兴无线传感网工程中心 | 基于无线传感网的超低空低速平面微带雷达探测器 |
| JP4715871B2 (ja) * | 2008-06-10 | 2011-07-06 | 株式会社デンソー | 方位検出装置、レーダ装置 |
| EP2189809A1 (en) * | 2008-11-24 | 2010-05-26 | Mitsubishi Electric R&D Centre Europe B.V. | Object ranging |
| KR100924326B1 (ko) * | 2009-02-23 | 2009-11-02 | 삼성탈레스 주식회사 | 수목 투과용 초광대역 레이더 장치 및 신호 처리 방법 |
| JP4996640B2 (ja) * | 2009-03-10 | 2012-08-08 | 株式会社東芝 | アンテナ装置、レーダ装置 |
| US9392521B2 (en) * | 2009-03-18 | 2016-07-12 | Telecommunication Systems, Inc. | System and method for concurrently determining locations of mobile device in wireless communication network |
| KR101775572B1 (ko) * | 2009-04-06 | 2017-09-06 | 콘티 테믹 마이크로일렉트로닉 게엠베하 | 송신 신호와 수신 신호를 디커플링하고 간섭 방사를 억제하기 위한 어레이와 방법을 채용한 레이더 시스템 |
| JP5345029B2 (ja) * | 2009-09-10 | 2013-11-20 | 富士通テン株式会社 | レーダ装置 |
| DE102009045141A1 (de) | 2009-09-30 | 2011-03-31 | Robert Bosch Gmbh | Radarsensor mit IQ-Empfänger |
| CN101980048B (zh) * | 2010-09-29 | 2012-09-19 | 中国科学院国家天文台 | 基于天线组阵技术的空间碎片地基雷达系统 |
| US8384588B2 (en) | 2010-10-26 | 2013-02-26 | Raytheon Company | Beam stabilization for wideband phase comparison monopulse angle estimation with electronically steered antennas |
| US8451173B2 (en) | 2011-04-21 | 2013-05-28 | Raytheon Company | Maximum likelihood angle estimation of wideband signals using phased array antennas |
| JP2013024836A (ja) * | 2011-07-26 | 2013-02-04 | Japan Radio Co Ltd | レーダ受信機 |
| FR2978560A1 (fr) * | 2011-07-29 | 2013-02-01 | Jean-Marc Cortambert | Dispositif de detection d'une cible resistant au fouillis, procede de detection |
| WO2013020105A2 (en) * | 2011-08-04 | 2013-02-07 | Rambus Inc. | Low-cost tracking system |
| EP2743721B1 (en) | 2011-08-12 | 2019-10-02 | Panasonic Corporation | Radar apparatus |
| WO2013118560A1 (ja) * | 2012-02-09 | 2013-08-15 | アルプス電気株式会社 | アンテナ装置及びそれを用いた到来角度算出装置 |
| DE102012016475B4 (de) * | 2012-08-17 | 2022-09-08 | Hensoldt Sensors Gmbh | Verfahren zur Richtungspeilung nach dem Monopulsprinzip |
| US9365126B2 (en) * | 2013-05-10 | 2016-06-14 | Qualcomm Incorporated | System and method for detecting the presence of a moving object below a vehicle |
| KR20140144826A (ko) * | 2013-06-12 | 2014-12-22 | 주식회사 만도 | 레이더 장치 및 안테나 장치 |
| KR20150015067A (ko) * | 2013-07-31 | 2015-02-10 | 주식회사 만도 | 차량용 레이더 캘리브레이션 시스템 |
| JP6260004B2 (ja) * | 2013-08-29 | 2018-01-17 | パナソニックIpマネジメント株式会社 | レーダシステム及びターゲット検知方法 |
| US9229100B2 (en) * | 2013-09-20 | 2016-01-05 | Toyota Motor Engineering & Manufacturing North America, Inc. | Phased array radar with monopulse algorithm measurement |
| DE102013113806A1 (de) * | 2013-12-11 | 2015-06-11 | Hella Kgaa Hueck & Co. | Radarvorrichtung und Verfahren hierfür |
| CN104076335A (zh) * | 2014-06-16 | 2014-10-01 | 西安天和防务技术股份有限公司 | 一种雷达接收系统 |
| KR102216774B1 (ko) * | 2014-06-23 | 2021-02-17 | 현대모비스 주식회사 | 차량용 레이더 신호 처리 장치 및 방법 |
| US9470777B2 (en) * | 2014-09-19 | 2016-10-18 | Delphi Technologies, Inc. | Radar system for automated vehicle with phase change based target catagorization |
| US9784820B2 (en) * | 2014-09-19 | 2017-10-10 | Delphi Technologies, Inc. | Radar system with phase based multi-target detection |
| JP6396244B2 (ja) * | 2015-03-25 | 2018-09-26 | パナソニック株式会社 | レーダ装置 |
| US10324166B2 (en) * | 2015-09-28 | 2019-06-18 | Rockwell Collins, Inc. | Affordable combined pulsed/FMCW radar AESA |
| KR102438228B1 (ko) * | 2015-10-07 | 2022-08-31 | 주식회사 에이치엘클레무브 | 차량용 레이더 장치와 이를 이용한 타겟의 각도 추정 방법 |
| JP6365494B2 (ja) * | 2015-10-07 | 2018-08-01 | 株式会社デンソー | アンテナ装置及び物標検出装置 |
| JP6400556B2 (ja) * | 2015-10-08 | 2018-10-03 | 株式会社ヨコオ | レーダ装置 |
| TWI598611B (zh) | 2015-11-25 | 2017-09-11 | 啟碁科技股份有限公司 | 雷達天線系統 |
| CN106814348B (zh) * | 2015-12-01 | 2019-11-01 | 启碁科技股份有限公司 | 雷达天线系统 |
| KR101644066B1 (ko) * | 2015-12-15 | 2016-07-29 | 주식회사 바이다 | 다중빔 생성 레이더 장치 |
| US20170328994A1 (en) * | 2016-05-16 | 2017-11-16 | Nidec Elesys Corporation | Radar system |
| US10914829B2 (en) * | 2017-01-27 | 2021-02-09 | Panasonic Intellectual Property Management Co., Ltd. | Positioning sensor, sensor, and method |
| EP3521852B1 (en) * | 2018-01-31 | 2021-07-14 | Sivers Wireless AB | Radar beamforming method |
| DE112018007500B4 (de) * | 2018-05-23 | 2022-01-13 | Mitsubishi Electric Corporation | Radareinrichtung |
| US11784403B2 (en) | 2019-04-03 | 2023-10-10 | Saab Ab | Antenna array and a phased array system with such antenna array |
| CN110058226B (zh) * | 2019-04-17 | 2021-05-07 | 北京遥感设备研究所 | 一种基于正负调频斜率线性调频的相控阵雷达测角系统 |
| KR102098862B1 (ko) * | 2019-08-22 | 2020-05-15 | 국방과학연구소 | 하이브리드 빔포밍 시스템에서 도래각을 추정하는 방법 및 장치 |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4646093A (en) * | 1984-08-22 | 1987-02-24 | Raytheon Company | Digital monopulse for tracking radar |
| US5600326A (en) * | 1991-12-16 | 1997-02-04 | Martin Marietta Corp. | Adaptive digital beamforming architecture and algorithm for nulling mainlobe and multiple sidelobe radar jammers while preserving monopulse ratio angle estimation accuracy |
| US5315304A (en) | 1993-07-02 | 1994-05-24 | The United States Of America As Represented By The Secretary Of The Navy | Digital monopulse |
| US5633642A (en) * | 1993-11-23 | 1997-05-27 | Siemens Aktiengesellschaft | Radar method and device for carrying out the method |
| JP3663703B2 (ja) | 1995-12-05 | 2005-06-22 | 株式会社デンソー | モノパルスレーダ装置 |
| JP2002511922A (ja) | 1997-01-21 | 2002-04-16 | オートモーティブ システムズ ラボラトリー インコーポレーテッド | 衝突予知感知システム |
| JPH10253730A (ja) * | 1997-03-06 | 1998-09-25 | Fujitsu Ltd | 広帯域方向推定装置および方法 |
| US5986605A (en) * | 1997-05-23 | 1999-11-16 | Raytheon Company | Method for improving monopulse processing of aperture segment outputs |
| JP3597678B2 (ja) * | 1997-08-18 | 2004-12-08 | 富士通株式会社 | レーダ装置 |
| JPH11125672A (ja) | 1997-10-24 | 1999-05-11 | Mitsubishi Electric Corp | Fm−cwレーダ |
| JP3525426B2 (ja) | 1997-11-28 | 2004-05-10 | トヨタ自動車株式会社 | レーダ装置 |
| DE19754720C2 (de) | 1997-12-10 | 2000-12-07 | Adc Automotive Dist Control | Verfahren zum Betrieb eines Radarsystems |
| EP0965859A4 (en) * | 1997-12-25 | 2001-03-14 | Toyoda Chuo Kenkyusho Kk | RADAR SYSTEM |
| JPH11281729A (ja) | 1998-03-31 | 1999-10-15 | Toyota Central Res & Dev Lab Inc | ビーム切替型レーダー装置 |
| JP2000031736A (ja) | 1998-07-07 | 2000-01-28 | Toyota Central Res & Dev Lab Inc | 位相モノパルスアンテナ装置 |
| JP3518363B2 (ja) * | 1998-09-07 | 2004-04-12 | 株式会社デンソー | Fmcwレーダ装置及び記録媒体並びに車両制御装置 |
| DE19942665B4 (de) | 1998-09-07 | 2014-02-13 | Denso Corporation | FM-CW-Radarvorrichtung zum Messen der Entfernung zu einem Target und der relativen Geschwindigkeit des Targets |
| KR100318842B1 (ko) | 1998-11-26 | 2002-04-22 | 윤종용 | 디지털위상제어루프에서의주파수검출방법 |
| JP2000221260A (ja) | 1999-02-03 | 2000-08-11 | Mitsubishi Electric Corp | 画像レーダ装置 |
| JP3622565B2 (ja) | 1999-03-31 | 2005-02-23 | 株式会社デンソー | レーダ装置 |
| JP3498624B2 (ja) | 1999-03-31 | 2004-02-16 | 株式会社デンソー | レーダ装置 |
| JP4258941B2 (ja) | 1999-06-03 | 2009-04-30 | 株式会社デンソー | レーダ装置 |
| US6573859B2 (en) * | 2000-02-07 | 2003-06-03 | Toyota Jidosha Kabushiki Kaisha | Radar apparatus |
| JP3463747B2 (ja) | 2000-02-14 | 2003-11-05 | トヨタ自動車株式会社 | Fm−cwレーダ装置 |
| JP2001264427A (ja) | 2000-03-22 | 2001-09-26 | Toshiba Corp | レーダ装置 |
| JP4111667B2 (ja) | 2000-09-26 | 2008-07-02 | 富士通テン株式会社 | Fm−cwレーダ装置 |
| US6697009B2 (en) * | 2001-06-15 | 2004-02-24 | Lockheed Martin Corporation | Adaptive digital beamforming architecture for target detection and angle estimation in multiple mainlobe and sidelobe jamming |
| JP3829659B2 (ja) | 2001-07-02 | 2006-10-04 | 三菱電機株式会社 | レーダ装置 |
| JP3821688B2 (ja) * | 2001-10-30 | 2006-09-13 | 三菱電機株式会社 | レーダ装置 |
| JP3918573B2 (ja) | 2002-02-08 | 2007-05-23 | 三菱電機株式会社 | レーダ装置 |
| JP3610052B2 (ja) * | 2002-04-18 | 2005-01-12 | 三菱電機株式会社 | レーダ装置 |
| JP4190335B2 (ja) * | 2003-04-03 | 2008-12-03 | 富士通テン株式会社 | レーダ装置及びその信号処理方法 |
| US6750809B1 (en) * | 2003-04-15 | 2004-06-15 | Raytheon Company | High resolution SAR processing using stepped frequency chirp waveform |
| JP4093109B2 (ja) * | 2003-05-15 | 2008-06-04 | 株式会社デンソー | 車両用レーダ装置 |
| US7573419B2 (en) * | 2003-05-21 | 2009-08-11 | Telefonaktiebolaget Lm Ericsson (Publ) | Method and system for unambiguous angle resolution of a sparse wide-band antenna array |
| EP1666914B1 (en) * | 2003-09-11 | 2017-04-05 | Mitsubishi Denki Kabushiki Kaisha | Radar device |
| JP4447946B2 (ja) * | 2004-03-22 | 2010-04-07 | 富士通テン株式会社 | レーダ装置 |
-
2004
- 2004-03-22 JP JP2004082627A patent/JP4447946B2/ja not_active Expired - Fee Related
-
2005
- 2005-03-03 US US11/070,601 patent/US7190305B2/en active Active
- 2005-03-07 EP EP05004895A patent/EP1580572A1/en not_active Ceased
- 2005-03-21 KR KR1020050023111A patent/KR100749560B1/ko active IP Right Grant
- 2005-03-22 CN CN200510056019A patent/CN100590449C/zh not_active Expired - Fee Related
Non-Patent Citations (2)
| Title |
|---|
| a hybrid partitioning architecture for adbf in monopulse arrays. HOWARD R L.RADAR ‘97,No.449. 1997 |
| a hybrid partitioning architecture for adbf in monopulse arrays. HOWARD R L.RADAR ‘97,No.449. 1997 * |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20060044469A (ko) | 2006-05-16 |
| CN1673770A (zh) | 2005-09-28 |
| US20050206556A1 (en) | 2005-09-22 |
| KR100749560B1 (ko) | 2007-08-14 |
| US7190305B2 (en) | 2007-03-13 |
| JP4447946B2 (ja) | 2010-04-07 |
| EP1580572A1 (en) | 2005-09-28 |
| JP2005265779A (ja) | 2005-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100590449C (zh) | 雷达装置 | |
| CN1985187B (zh) | 单脉冲雷达装置及天线切换开关 | |
| EP0913705B1 (en) | FM-CW radar | |
| CN110967671B (zh) | 雷达装置、移动物体以及静止物体 | |
| US5351053A (en) | Ultra wideband radar signal processor for electronically scanned arrays | |
| US8941533B2 (en) | Method and device for detecting azimuth | |
| EP1742081B1 (en) | Digital beamforming for an electronically scanned radar system | |
| US7737879B2 (en) | Split aperture array for increased short range target coverage | |
| US6067048A (en) | Radar apparatus | |
| JP3393204B2 (ja) | マルチビームレーダ装置 | |
| US11536799B2 (en) | Electronic device, radar device and radar control method | |
| US20080100510A1 (en) | Method and apparatus for microwave and millimeter-wave imaging | |
| US11802958B2 (en) | Hybrid multiple-input multiple-output (MIMO) radar system | |
| US5493306A (en) | Phased array antenna system to produce wide-open coverage of a wide angular section with high directive gain and moderate capability to resolve multiple signals | |
| WO2007023371A1 (en) | Grating lobe assisted search radar system utilising antenna with multiple elements | |
| CN111352081A (zh) | 用于高分辨率雷达系统的行波成像歧管 | |
| US20050046607A1 (en) | Ultra high resolution radar with active electronically scanned antenna (AESA) | |
| CN110095771A (zh) | 雷达波束成形方法 | |
| JP4371124B2 (ja) | アンテナ装置 | |
| US5430453A (en) | Cylindrical phased array antenna system to produce wide-open coverage of a wide angular sector with high directive gain and moderate capability to resolve multiple signals | |
| US11843162B2 (en) | MIMO radar system for an aerial vehicle | |
| US11784403B2 (en) | Antenna array and a phased array system with such antenna array | |
| JP7479968B2 (ja) | レーダ装置及びレーダ信号処理方法 | |
| Nersisyan et al. | Digital Beamforming For OFDM 3D Radar. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20100217 |