BR112016013700B1 - Conjunto e método de frear a queda de um objeto - Google Patents
Conjunto e método de frear a queda de um objeto Download PDFInfo
- Publication number
- BR112016013700B1 BR112016013700B1 BR112016013700-0A BR112016013700A BR112016013700B1 BR 112016013700 B1 BR112016013700 B1 BR 112016013700B1 BR 112016013700 A BR112016013700 A BR 112016013700A BR 112016013700 B1 BR112016013700 B1 BR 112016013700B1
- Authority
- BR
- Brazil
- Prior art keywords
- cylinder
- tube
- assembly
- force
- rotation
- Prior art date
Links
Images









Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K49/00—Dynamo-electric clutches; Dynamo-electric brakes
- H02K49/02—Dynamo-electric clutches; Dynamo-electric brakes of the asynchronous induction type
- H02K49/04—Dynamo-electric clutches; Dynamo-electric brakes of the asynchronous induction type of the eddy-current hysteresis type
- H02K49/043—Dynamo-electric clutches; Dynamo-electric brakes of the asynchronous induction type of the eddy-current hysteresis type with a radial airgap
-
- A—HUMAN NECESSITIES
- A62—LIFE-SAVING; FIRE-FIGHTING
- A62B—DEVICES, APPARATUS OR METHODS FOR LIFE-SAVING
- A62B1/00—Devices for lowering persons from buildings or the like
- A62B1/06—Devices for lowering persons from buildings or the like by making use of rope-lowering devices
-
- A—HUMAN NECESSITIES
- A62—LIFE-SAVING; FIRE-FIGHTING
- A62B—DEVICES, APPARATUS OR METHODS FOR LIFE-SAVING
- A62B35/00—Safety belts or body harnesses; Similar equipment for limiting displacement of the human body, especially in case of sudden changes of motion
- A62B35/0093—Fall arrest reel devices
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63G—MERRY-GO-ROUNDS; SWINGS; ROCKING-HORSES; CHUTES; SWITCHBACKS; SIMILAR DEVICES FOR PUBLIC AMUSEMENT
- A63G21/00—Chutes; Helter-skelters
- A63G21/20—Slideways with movably suspended cars, or with cars moving on ropes, or the like
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K2213/00—Specific aspects, not otherwise provided for and not covered by codes H02K2201/00 - H02K2211/00
- H02K2213/03—Machines characterised by numerical values, ranges, mathematical expressions or similar information
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Dynamo-Electric Clutches, Dynamo-Electric Brakes (AREA)
- Mechanical Operated Clutches (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Manipulator (AREA)
- Transmission Devices (AREA)
- Valve Device For Special Equipments (AREA)
Abstract
conjunto e método de frear a queda de um objeto, e dispositivo de segurança para proteção de queda. são descritos aqui um conjunto (1) e métodos de seu uso para controlar ou governar a velocidade relativa de movimento entre as peças montadas, por meio de formação de corrente parasita. o conjunto (1) e métodos também podem minimizar o número de peças requerido e podem minimizar o número de peças móveis, com isto aumentando a durabilidade mecânica do conjunto comparada a projetos técnicos que podem ter mais peças móveis e maior complexidade de peças.
Description
[001] É descrito aqui um conjunto para controlar ou governar velocidade relativa de movimento entre peças. Mais especificamente, é descrito aqui um conjunto que usa formação de corrente de Foucault para controlar ou governar a velocidade relativa de movimento entre duas peças.
[002] Formação de corrente de Foucault pode ser usada em diversas maneiras para ajustar a velocidade de rotação de um membro. Diversos aparelhos existem, por exemplo, em rapel, para controlar a descida de um alpinista ou, por exemplo, em cenários de equipamento de proteção pessoal para impedir uma queda que provoque ferimento. Outras aplicações que usam geração de corrente de Foucault estão no controle de fornecimento de linha em trens, teleféricos, dispositivos para tirolesa e montanhas russas.
[003] Um dispositivo técnico está publicado como US2012/0055740. Este dispositivo utiliza um conjunto de rotor. Os próprios motores podem ser condutores ou magnéticos ou podem ter membros condutores ou magnéticos ligados a eles. Quando uma força de rotação é aplicada, os rotores movem para fora de um eixo geométrico central por meio de força centrífuga e para o interior de um campo magnético (ou condutor). Quando os rotores movem através do campo, correntes parasitas são geradas, cuja resistência é proporcional à velocidade de rotação. Quando a velocidade de rotação reduz, os rotores são trazidos de volta no sentido do eixo geométrico de rotação por meio de molas. Este dispositivo é amplamente usado, contudo requer uma quantidade de peças móveis. Outra desvantagem é que, quando os rotores movem para fora e o campo é gerado, o campo magnético não é contínuo ao redor da circunferência do eixo geométrico de giro, e daí não proporciona um trajeto contínuo de geração de corrente de Foucault.
[004] Como pode ser apreciado, reduzir o número de peças em conjuntos mecânicos pode ser uma vantagem de modo a reduzir o custo do conjunto. Em adição, partes móveis em conjuntos mecânicos geralmente requerem mais manutenção e daí custam mais. Minimizar o número de peças móveis pode ser vantajoso. Maximizar geração de força por corrente de Foucault pode também ser uma vantagem, ou pelo menos pode ser útil para dotar o público com uma escolha.
[005] Outros aspectos e vantagens do conjunto e métodos de uso dele se tornarão evidentes a partir da descrição a seguir, que é fornecida apenas à guisa de exemplo.
[006] É descrito aqui um conjunto e métodos de seu uso para controlar ou governar a velocidade relativa de movimento entre as peças do conjunto por meio de formação de corrente de Foucault. O conjunto e métodos podem também minimizar o número de peças requerido e pode minimizar o número de peças móveis, com isto aumentando a durabilidade mecânica do conjunto comparada a projetos técnicos que podem ter mais peças móveis e maior complexidade.
[007] Em um primeiro aspecto é fornecido um conjunto que compreende: um tubo que inclui uma parede e vazio definido nele; e um cilindro que se ajusta no vazio do tubo; no qual, em uso, o cilindro e tubo têm diferentes velocidades de rotação um em relação ao outro, e no qual o tubo e cilindro ou uma parte dele interagem para alterar uma força de frenagem induzida por corrente de Foucault contra diferentes velocidades relativas de movimento com modulação da força de frenagem que surge devido a um equilíbrio das forças sobre o tubo e cilindro.
[008] Em um segundo aspecto é fornecido um conjunto substancialmente como descrito acima, no qual o eixo geométrico e a rotação do tubo e/ou cilindro são articulados a um eixo que pode, por sua vez, ser articulado a um carretel de linha, e no qual o conjunto de controle de velocidade regula a velocidade de liberação de linha a partir do carretel.
[009] Em um terceiro aspecto é fornecido um método de frear a queda de um objeto por meio da etapa de articular o objeto ou objetos a um carretel de linha que, por sua vez, é articulado ao conjunto substancialmente como descrito acima, e que permite ao objeto ou objetos caírem por meio da gravidade, com isto criando uma força de torque sobre o eixo que, por sua vez, faz com que o conjunto de controle de velocidade crie uma força de frenagem na liberação da linha a partir do carretel.
[0010] Em um quarto aspecto é fornecido um dispositivo de segurança para proteção de queda, que inclui um conjunto substancialmente como descrito acima.
[0011] Em um quinto aspecto é fornecido um conjunto substancialmente como descrito acima, no qual o conjunto é incorporado em um percurso de divertimento em tirolesa para controlar a aceleração e desaceleração de uma cadeira suspensa de passageiro de tirolesa conectada a um cabo articulado com o sistema de controle de velocidade.
[0012] Os inventores previram um aparelho onde os diversos componentes interagem para alterar uma força de frenagem induzida por corrente de Foucault, com modulação de força de frenagem que surge devido a um equilíbrio das forças sobre o tubo e cilindro, determinando a extensão de força aplicada.
[0013] Vantagens do acima incluem o fornecimento de um conjunto e método com poucas peças móveis, que ainda proporciona um uso eficiente e transferência de forças de corrente de Foucault para controlar ou governar a velocidade relativa de movimento de peças no conjunto. BREVE DESCRIÇÃO DOS DESENHOS
[0014] Outros aspectos do conjunto e métodos de seu uso se tornarão evidentes a partir da descrição que segue, que é fornecida apenas à guisa de exemplo e com referência aos desenhos que acompanham, nos quais:
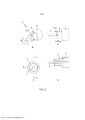
[0015] A figura 1 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade do conjunto, usando um eixo parafuso condutor com as peças em um alinhamento sem frenagem;
[0016] A figura 2 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade alternativa do conjunto durante uma rampa de acionamento sobre o eixo com as peças em um alinhamento de frenagem parcial;
[0017] A figura 3 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade alternativa do conjunto usando um mecanismo de desvio;
[0018] A figura 4 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade alternativa do conjunto usando um mecanismo de desvio alternativo;
[0019] A figura 5 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade alternativa do conjunto usando uma rampa de acionamento sobre o eixo e mecanismo de desvio com as peças em um alinhamento de frenagem parcial;
[0020] A figura 6 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade do conjunto usando um eixo de parafuso condutor e um peso com as peças em um alinhamento de frenagem parcial;
[0021] A figura 7 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade do conjunto usando um eixo parafuso condutor, peso e mecanismo de desvio com as peças em um alinhamento de frenagem parcial.;
[0022] A figura 8 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade do conjunto usando uma rampa e arranjo de peso com as peças em um alinhamento de frenagem parcial;
[0023] A figura 9 ilustra uma vista em perspectiva [A], uma vista lateral [B], uma vista frontal [C] e uma vista em seção lateral [D] ao longo da linha de corte AA de uma modalidade do conjunto usando uma rampa, arranjo de peso e mecanismo de desvio com as peças em um alinhamento de frenagem parcial;
[0024] A figura 10 ilustra formas alternativas de cilindro e tubo que podem ser usadas;
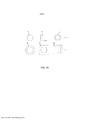
[0025] A figura 11 ilustra uma vista lateral em seção transversal de um projeto de tubo e cilindro usando paredes concêntricas de diversas camadas;
[0026] A figura 12 ilustra uma modalidade em vista lateral em seção transversal alternativa de um projeto de tubo e cilindro usando paredes concêntricas de diversas camadas com posições de magneto variáveis para aquela mostrada na figura 11; e
[0027] A figura 13 ilustra outra vista lateral em seção transversal de modalidade de parede concêntrica de diversas camadas.
[0028] Como observado acima, é descrito aqui um conjunto e métodos de uso dele para controlar ou governar a velocidade relativa de movimento entre o conjunto de peças por meio de formação de corrente de Foucault. O conjunto e métodos também podem minimizar o número de peças requerido, o que pode minimizar o número de peças móveis, aumentando com isto a durabilidade mecânica do conjunto comparada a projetos técnicos que podem ter mais peças móveis e maior complexidade de peças.
[0029] Para as finalidades desta especificação, o termo "cerca de" ou "aproximadamente" e variações gramaticais dele significam uma quantidade, nível, grau, valor, número, frequência, porcentagem, dimensão, tamanho, quantidade, peso, ou comprimento que varia por tanto quanto 30, 25, 20, 15, 10, 9, 8, 7, 6, 5, 4, 3, 2, ou 1% para uma quantidade de referência, nível, grau, valor, número, frequência, porcentagem, dimensão, tamanho, quantidade, peso, ou comprimento.
[0030] O termo "substancialmente", ou variações gramaticais dele, se refere a no mínimo cerca de 50%, por exemplo 75%, 85%, 95%, ou 98%.
[0031] O termo "compreende" e variações gramaticais dele devem ter um significado inclusivo, isto é, que ele será assumido para significar uma inclusão não somente dos componentes listados que ele referencia diretamente, mas também outros componentes ou elementos não especificados.
[0032] O termo "tubo" e variações gramaticais dele pode, em uma modalidade, se referir, a um elemento cilíndrico que tem um furo circular ou um vazio ao qual um cilindro circular corresponde, mas também poderia ser uma parede exterior quadrada de tubo e vazio circular, ou uma parede poligonal de tubo (interior e exterior) ou uma parede de tubo tronco-cônica.
[0033] O termo "cilindro" e variações gramaticais dele pode se referir a diversas formas, um critério chave sendo a capacidade do cilindro mover axialmente e/ou em rotação em relação ao espaço vazio de tubo ou vice-versa, isto é, o tubo pode também mover axialmente e/ou em rotação em relação ao cilindro. Observar que o cilindro não precisa ser sólido e pode ter nele um espaço ou espaços vazios.
[0034] Em um primeiro aspecto é fornecido um conjunto que compreende: um tubo que inclui uma parede e vazio definido nele; e um cilindro que se ajusta no vazio do tubo; no qual, em uso, o cilindro e tubo têm diferentes velocidades de rotação um em relação ao outro, e no qual o tubo e cilindro, ou uma parte dele, interagem para alterar uma força de frenagem induzida por corrente de Foucault contra velocidade de movimento relativo diferente com modulação de força de frenagem surgindo devido a um equilíbrio das forças sobre o tubo e cilindro.
[0035] Os inventores previram uma parede onde os diversos componentes interagem para alterar uma força de frenagem induzida por corrente de Foucault com modulação de força de frenagem surgindo devido a um equilíbrio das forças sobre o tubo e cilindro determinando a extensão de força aplicada.
[0036] O cilindro pode mover em relação ao tubo por meio de dois graus de movimento separados, que são: (a) translação axial do cilindro em relação ao tubo, de modo que o cilindro pode passar pelo menos parcialmente para dentro ou para fora do vazio do tubo; e (b) rotação do cilindro em relação ao tubo ao redor de um eixo geométrico longitudinal, o eixo geométrico passando através do vazio do tubo.
[0037] Alternativamente, o tubo pode mover em relação ao cilindro por meio de dois graus de movimento separados, que são: (a) translação axial do tubo em relação ao cilindro, de modo que o cilindro pode passar pelo menos parcialmente para dentro ou para fora do vazio do tubo; e (b) rotação do tubo em relação ao cilindro ao redor de um eixo geométrico longitudinal, o eixo geométrico passando através do vazio do tubo.
[0038] Acoplado ao tubo e cilindro pode haver um ou mais membros condutores e um ou mais membros magnéticos, o tubo e cilindro tendo, cada um, ou membros magnéticos ou membros condutores, e os membros condutores e membros magnéticos orientados para interagir uns com os outros.
[0039] O tubo e cilindro podem ter um eixo geométrico comum de rotação. Como observado acima, o tubo e cilindro podem ter formas variáveis de seção transversal que não precisam ser circulares. É, contudo, antecipado que um vazio circular no tubo e seção transversal de cilindro circular correspondente deveriam fornecer o grau de eficiência máximo e daí, isto poder ser vantajoso para a maior parte de aplicações. Com duas seções transversais circulares se aninhando, um eixo geométrico comum de rotação pode ser um aspecto útil.
[0040] O cilindro pode girar ao redor de um membro rotativo que passa através do eixo geométrico de rotação do cilindro e tubo. Um membro rotativo pode ser um eixo, embora outras configurações possam ser possíveis. Outros aspectos podem ser incluídos entre o eixo e cilindro tal como mancais. Em uma modalidade alternativa, o tubo pode girar ao redor de um membro rotativo, tal como um eixo.
[0041] O membro rotativo pode incluir uma ranhura helicoidal para traduzir o movimento de rotação do membro para movimento linear do cilindro. O passo da ranhura helicoidal e/ou condutor pode ser variado para variar a resposta de freio. O membro rotativo pode ser um parafuso condutor. Uma ranhura helicoidal pode ser usada para controlar e/ou acionar movimento axial do cilindro. Isto não é essencial uma vez que outros métodos podem ser usados para controlar e acionar movimento axial, tal como diferentes arranjos de desvio, ou diferentes arranjos de face de mancal, e uma ranhura helicoidal não deveria ser vista como limitante.
[0042] O membro ou membros condutores podem ser mais largos do que o membro ou membros magnéticos. Embora não essencial, a geração máxima de corrente de Foucault pode ocorrer quando os membros condutores são mais largos do que os membros magnéticos, de modo que um campo magnético totalmente induzido é gerado. Regiões de membro condutor menor podem ainda ser usadas, porém, um campo magnético menor pode ser gerado nestas circunstâncias, conduzindo a uma formação de arraste de corrente de Foucault reduzida.
[0043] O espaço entre os membros magnético e condutor pode ser minimizado para maximizar a força de frenagem de corrente de Foucault. Como pode ser apreciado, um espaço grande conduz a um campo magnético menor e menos geração de força de arraste de corrente de Foucault. Isto pode ser vantajoso em algumas circunstâncias, contudo, para gerar a força máxima para o esforço mínimo, um espaço substancialmente pequeno (menor do que aproximadamente 5 mm, ou 4 mm, ou 3 mm, ou 2 mm, ou menor do que 1 mm) pode ser útil.
[0044] O tubo pode ser fixado no lugar e o cilindro pode mover axialmente e em rotação em relação ao tubo. Movimento oposto pode ser útil, por exemplo, tendo o tubo movendo por meio de um motor no sentido para longe do cilindro, porém uma intenção do conjunto descrito aqui é minimizar o número global de peças requeridas e também o número de peças móveis.
[0045] O cilindro pode girar em uma velocidade relativa diferente ao tubo em uma direção concorrente ou em contracorrente. Como pode ser apreciado, de importância chave para gerar correntes parasitas é uma velocidade relativa de rotação diferente entre o membro condutor e o membro magnético. Um meio de conseguir isto é ter o membro condutor sendo o tubo e o membro magnético sendo o cilindro, e tendo cada membro girando em uma velocidade relativa diferente. Como observado acima, o tubo pode ser fixado no lugar e não girar de todo. O tubo pode também girar ou na mesma direção (porém em uma velocidade diferente do cilindro) ou pode girar na direção oposta ao cilindro (caso em que uma força de corrente de Foucault mais forte poderia resultar devido a uma diferença de velocidade relativa maior).
[0046] O cilindro pode estar pelo menos parcialmente fora do tubo quando o cilindro e o tubo não estão girando. O cilindro pode estar pelo menos parcialmente dentro do tubo quando o cilindro e/ou o tubo não estão girando. Variar a posição do cilindro parcialmente quando o conjunto está em repouso pode alterar as características no início de rotação. Por exemplo, se o cilindro já está no tubo, geração imediata de força de arraste por corrente de Foucault irá ocorrer quando o cilindro ou tubo gira. Se o cilindro está fora do tubo quando começa a rotação irá ocorrer força de corrente de Foucault imediata mínima - este efeito retardado poderia ser útil quando uma pequena quantidade de rotação é desejada, tal como quando um fornecimento lento de linha é necessário em uma aplicação de subida. Quando uma queda ocorre, o fornecimento de linha se torna muito mais rápido e esta velocidade de rotação mais rápida pode então provocar engatamento do cilindro e tubo por meio de translação axial para gerar uma força de arraste e efeito de freio.
[0047] Variar a resistência do pelo menos um membro magneto e/ou posição no cilindro ou tubo, pode variar a resposta de freio. Variar a composição química do pelo menos um membro condutor e/ou posição sobre o cilindro ou tubo, pode variar a resposta de freio. Para ilustrar ainda mais este aspecto, alguns dispositivos técnicos de corrente de Foucault usam membros condutores ou magnéticos espaçados separados. O resultado disto pode ser um nível mais baixo de geração de corrente de Foucault do que um campo contínuo. Por exemplo, os membros condutores podem estar movendo em rotação para dentro e fora de um campo magnético, e daí eles podem apenas estar criando uma força de arraste de corrente de Foucault menor ou menos eficiente do que se o campo fosse contínuo. Em contraste, o arranjo descrito de um tubo e cilindro significa que pode ser possível gerar um campo contínuo entre os membros condutor e magnético devido à natureza contínua da superfície do vazio do tubo e superfície do cilindro. Um exemplo de uma relação de geração de corrente de Foucault completamente contínua pode ser ter o cilindro feito inteiramente de um membro condutor, ou pelo menos a superfície exterior do cilindro ser feita de, ou conter um membro eletricamente condutor e o próprio tubo ou superfície exterior do vazio do tubo ser feita de, ou conter um membro magnético. Uma interface contínua é então criada entre as duas peças para geração de corrente de Foucault. Variações disto podem também ser tomadas, onde uma interface menos que contínua é desejada contudo, a capacidade para criar uma superfície contínua pode ser exclusiva e uma vantagem deste projeto específico.
[0048] Variar a velocidade de rotação relativa do tubo e cilindro pode variar a resposta de freio. Como observado acima, velocidade relativa é chave na geração de correntes parasitas. Admitindo que a posição axial do cilindro e tubo não muda e o posicionamento dos membros condutor e magnético não muda, uma próxima maneira de alterar as características de corrente de Foucault pode ser mudar a velocidade relativa de rotação.
[0049] Pelo menos parte do cilindro pode conter ou pode ser formado de material eletricamente condutor, e pode com isto formar um membro condutor. Pelo menos parte do tubo pode conter ou pode ser formada de material eletricamente condutor e pode com isto formar um membro condutor. Membros condutores podem ser colocados sobre a superfície do cilindro ou tubo e, de maneira similar, membros magnéticos podem ser colocados sobre a superfície do cilindro ou tubo. A parede do vazio do tubo ou do tubo pode, ela mesma, ser um material condutor ou magnético, como pode o próprio cilindro ou exterior do cilindro.
[0050] Movimento axial do tubo e/ou cilindro pode ser atuado por meio de pelo menos um motor. Um motor pode ser evitado para minimizar peças e minimizar partes móveis no conjunto global embora pudesse ser incorporado, se desejado.
[0051] O conjunto pode incluir um membro de desvio que cria uma força axial direta ou indireta sobre o tubo e/ou cilindro, deslocando o tubo e/ou cilindro juntos ou separados em rotação do tubo e/ou cilindro. O membro de desvio pode ser uma mola ou molas.
[0052] Movimento axial do tubo e/ou cilindro pode ser gerado quando o tubo e/ou cilindro gira, o movimento axial provocado por uma tradução de energia centrífuga para translação axial. O tubo e/ou cilindro pode incluir no mínimo um peso deslocado do eixo geométrico de rotação que, em rotação do tubo e/ou cilindro pode estar submetido a uma força centrífuga e por meio de uma relação cinemática traduzir a força centrífuga para uma força axial sobre o tubo e/ou cilindro, com isto provocando movimento axial relativo do tubo e/ou cilindro. Uma alavanca que converte o movimento de rotação do peso para movimento axial do cilindro ou tubo, pode atuar para formar a relação cinemática. O peso ou pesos podem mover, pelo menos parcialmente, radialmente na aplicação de uma força centrífuga. Em uma modalidade alternativa, movimento centrífugo para fora do peso ou pesos pode provocar um movimento axial do cilindro, atuando sobre um arranjo de rampa.
[0053] O tubo e/ou cilindro podem também ser formados como diversas camadas, o cilindro, por exemplo, tendo um interior oco e que corresponde com um tubo que tem paredes exteriores pelo menos parcialmente se estendendo sobre o exterior do cilindro, e paredes internas se estendendo para o interior do interior oco do cilindro, seja antes, durante ou depois de movimento relativo do tubo e cilindro. O tubo e cilindro podem ter diversas paredes concêntricas que se aninham. Magnetos e/ou membros condutores podem ser localizados sobre as paredes do cilindro e/ou uma ou mais das paredes exterior e/ou interior do tubo. Em outra modalidade o cilindro pode ter diversas camadas de parede concêntricas correspondendo com diversas camadas de parede concêntricas sobre o tubo, e magnetos e/ou membros condutores colocados sobre algumas ou todas as camadas de parede.
[0054] Em um segundo aspecto é fornecido um conjunto substancialmente como descrito acima, no qual o eixo geométrico e rotação do tubo e/ou cilindro são articulados a um eixo que pode, por sua vez, ser articulado a um carretel de linha e no qual o conjunto de controle de velocidade regula velocidade de fornecimento da linha a partir do carretel.
[0055] O conjunto acima pode incluir um mecanismo de retração que retrai de volta linha fornecida sobre o carretel e uma força de fornecimento é removida.
[0056] A força de frenagem aplicada para fornecimento do carretel de linha pode estar em uma velocidade substancialmente constante para extensão sobre uma faixa de torque aplicado.
[0057] O conjunto como descrito acima pode incluir uma carcaça, a carcaça encerrando pelo menos uma porção do conjunto. Uma carcaça pode ser útil para colocar o conjunto à prova de tempo e também para melhorar a estética do conjunto. Uma carcaça pode também ser importante para segurança, para evitar ferimento ou acidental.
[0058] Em um terceiro aspecto é fornecido um método de frear a queda de um objeto por meio da etapa de articular o objeto ou objetos a um carretel de linha, substancialmente como descrito acima e permitir ao objeto ou objetos caírem por meio da gravidade, criando com isto uma força de torque sobre o eixo que, por sua vez faz, com que o conjunto de controle de velocidade crie uma força de frenagem no fornecimento da linha a partir do carretel.
[0059] A força de frenagem pode também reduzir velocidade de retração da linha, suficiente para permitir que uma linha completamente estendida com nada ligado à linha, retraia de forma limpa.
[0060] A faixa de torque aplicado pode cobrir objetos ligados à linha pesando cerca de 9, ou 10, ou 11, ou 12, ou 13, ou 14, ou 15, ou 20, ou 25, ou 30, ou 35, ou 40, ou 45, ou 50, ou 55, ou 60, ou 65, ou 70, ou 75, ou 80, ou 85, ou 90, ou 95, ou 100, ou 105, ou 110, ou 115, ou 120, ou 125, ou 130, ou 135, ou 140, ou 145, ou 150 kg. A faixa pode ser desde cerca de 9 kg até cerca de 150 kg.
[0061] Em um quarto aspecto é fornecido um dispositivo de segurança para proteção de queda, incluindo um conjunto substancialmente como descrito acima.
[0062] Em um quinto aspecto é fornecido um conjunto substancialmente como descrito acima, no qual o conjunto é incorporado em um percurso de divertimento em tirolesa para controlar a aceleração e desaceleração de uma cadeira de passageiro de tirolesa suspensa a um cabo articulado com o sistema de controle de velocidade.
[0063] Para resumir, controle ou governança da velocidade relativa dos membros que usam o dispositivo descrito pode ocorrer como para os dois exemplos A e B abaixo.
[0064] A. Na modalidade de um cilindro que interage com um eixo e tubo onde: - Os dois são conectados em uma maneira na qual uma relação cinemática existe, onde rotação relativa dos dois ao longo de seu eixo geométrico é ligada a um movimento de translação relativo correspondente; - Aplicação de um torque sobre o eixo provoca a rotação do eixo, e com isto rotação do cilindro; - Rotação do cilindro resulta em formação de um torque de arraste de corrente de Foucault sobre o cilindro; e/ou - Um torque de inércia é gerado pelo cilindro devido a uma aceleração de rotação do eixo aplicada; - A relação cinemática fornece uma força axial correspondente sobre o cilindro; - Um dispositivo de desvio pode ser conectado entre o eixo e cilindro, pelo que, o desvio está em relação com a rotação relativa do eixo e cilindro, e a rotação relativa do cilindro e eixo alcança um equilíbrio onde o torque de arraste parasita e o torque de inércia são equilibrados pelo torque de reação do dispositivo de desvio; ou - Um dispositivo de desvio é conectado entre o cilindro e um corpo terra, possivelmente o tubo ou estrutura suporte, pelo que, o desvio está em relação com a translação relativa do eixo e cilindro, e a translação relativa do cilindro e eixo alcança um equilíbrio onde a força axial induzida, induzida pela conexão cinemática do torque de arraste parasita e o torque de inércia, são equilibradas pela força de reação axial do dispositivo de desvio; e - A posição de equilíbrio resultante do eixo, cilindro, e tubo fornece um torque de frenagem induzido por corrente de Foucault controlado com base na velocidade de rotação e aceleração do eixo; e - O torque induzido equilibra um torque aplicado.
[0065] B. Um cilindro interagindo com um eixo, onde: - Os dois são conectados em uma maneira na qual existe uma relação cinemática onde o movimento de translação relativo é permitido e um sistema centrífugo é disposto para aplicar força axial sobre o cilindro quando da rotação do eixo; e - Um dispositivo de desvio é conectado entre o cilindro e um corpo "terra" (possivelmente o tubo ou estrutura suporte), pelo que o desvio está em relação com a translação relativa do eixo e cilindro e a transação relativa do cilindro e eixo alcança um equilíbrio onde a força axial induzida de maneira centrífuga é equilibrada pela força de reação axial do dispositivo de desvio; e - A posição de equilíbrio resultante do eixo, cilindro e tubo fornece um torque de frenagem induzido por corrente de Foucault controlado com base na velocidade de rotação e a aceleração do eixo; e - O torque induzido equilibra um torque aplicado.
[0066] Vantagens do conjunto acima incluem a capacidade para controlar ou governar a velocidade relativa de movimento entre as peças em uma maneira eficiente que pode também minimizar o número de peças requerido ou pode minimizar o número de peças móveis. Reduzir o número de peças móveis pode aumentar a durabilidade mecânica do conjunto, uma vez que, tipicamente, em dispositivos mecânicos, peças móveis são onde os objetos mecânicos falham ou requerem manutenção, e daí, custam mais.
[0067] O conjunto e métodos de uso acima descritos são agora descritos por meio de referência a exemplos específicos.
[0068] Fazendo referência às figuras 1A-1D, uma modalidade do conjunto está mostrada. O conjunto 1 como ilustrado inclui um tubo 2 com uma parede interior 3A e uma parede exterior 3B e um vazio nele. O conjunto 1 também inclui um cilindro 5. O cilindro 5 move em relação ao tubo 2 através de dois graus de movimento, sendo uma translação axial ao longo da seta A para dentro e para fora do vazio do tubo 2, e um movimento de rotação B em relação ao tubo 2. O movimento axial A pode ser completamente ou parcialmente para dentro ou para fora do vazio 4. Na modalidade ilustrada o tubo 2 e cilindro 5 compartilham um eixo geométrico de rotação central comum. O cilindro 5 pode girar na direção B ao redor de um eixo 7. O eixo 7 pode ter uma ranhura helicoidal sobre ele que quando o eixo 7 gira na direção B aciona movimento axial A do cilindro 5 em relação ao tubo 2. O tubo 2 e o cilindro 5 podem incluir um ou mais membros condutores e membros magnéticos (não mostrado). Em uma modalidade os membros condutores podem estar sobre o tubo 2 ou o próprio tubo 2 pode ser um membro condutor e os membros magnéticos podem estar sobre o cilindro 5 ou o próprio cilindro 5 pode ser um membro magnético. O cenário oposto pode também ser o caso com os membros condutores sobre o cilindro 5 ou o próprio cilindro 5 pode ser um membro condutor e os membros magnéticos podem estar sobre o tubo 2 ou o próprio tubo 2 pode ser um membro magnético. Em uso, quando o tubo 2 e cilindro 5 têm diferentes velocidades relativas de rotação, forças de arraste de correntes parasitas são produzidas entre os membros 2 e 5 resistindo à rotação quando colocados juntos em proximidade. Em uma modalidade o tubo 2 pode ser fixado em posição e o cilindro 5 gira. Quando o cilindro 5 penetra no tubo 2 forças de corrente de Foucault (não mostrado) criam uma força de arraste na rotação B do cilindro 5 e a velocidade de rotação B se reduz. Como pode ser apreciado, uma força de corrente de Foucault não necessariamente interrompe toda a rotação B, porém prende a velocidade de rotação ao nível relacionado ao campo magnético relativo produzido pelo movimento do cilindro 5 no vazio 4 do tubo 2. Movimento de rotação relativo B rápido pode resultar em uma força de frenagem forte, por exemplo. Em outras modalidades o tubo 2 pode também girar na mesma direção que o cilindro 5 (porém em uma velocidade relativa diferente) ou em uma direção de rotação contrária ao cilindro 5.
[0069] Como observado acima, o eixo 7 pode ter uma ranhura helicoidal que aciona movimento axial do cilindro 5. A ranhura helicoidal pode ser uma rosca ou pode ser um parafuso condutor. O passo da ranhura helicoidal e/ou condutora pode ser variado para variar a resposta de freio. À guisa de exemplo, o passo e/ou condução pode ser tal que uma pequena rotação do eixo 7 provoca uma grande translação axial A do cilindro 5 conduzindo a uma força de frenagem rápida ser aplicada quando o cilindro 5 move rapidamente para o interior do tubo 2 e uma força de corrente de Foucault é gerada. O oposto pode também ser o caso onde passo e/ou condução é variado para somente permitir uma progressão axial A lenta resultando, portanto, em uma resposta de frenagem lenta.
[0070] As figuras 2A até 2D ilustram uma modalidade alternativa onde movimento axial do cilindro 5 pode ser acionado por uma superfície em rampa 16 ao redor de uma interface 13 no cilindro 5. Quando o cilindro 5 gira o cilindro 5 é forçado para o vazio 4 do tubo 2. Neste exemplo nenhuma rosca helicoidal é requerida sobre o eixo 7 para acionar movimento.
[0071] As figuras 3A até 3D ilustram uma modalidade alternativa onde movimento axial do cilindro 5 pode ser influenciado também por um mecanismo de desvio tal como uma mola 8. A mola 8 pode ser usada para mudar as características da ação de frenagem. Por exemplo, a mola 8 pode ser desviada para trazer o cilindro 5 para fora do tubo 2. Quando rotação do cilindro 5 reduz de maneira suficiente, a mola 8 nesta modalidade pode atuar para trazer o cilindro 5 do tubo 2 e assim liberar a força de frenagem. Em uma modalidade alternativa a mola 8 pode ser usada ao invés disto para forçar o cilindro 5 para o interior do tubo 2 para manter uma força de frenagem por um período de tempo mais longo, ou para acelerar o ritmo no qual uma força de frenagem pode ser aplicada.
[0072] As figuras 4A até 4C ilustram outro arranjo de desvio alternativo. O cilindro 5 no conjunto 1 mostrado pode ser ligado a uma barra ou seção de cilindro fixo 18 com cada extremidade distal da seção 18 conectada a dois lados do cilindro 5 através de dois membros de desvio 23, 24. Os pontos de conexão dos membros molas sobre o cilindro 5 são desviados em relação aos pontos de conexão sobre a barra 18. Quando o cilindro 5 gira o desvio reduz ou desaparece inteiramente de maneira efetiva alongando a distância entre a barra 18 e o cilindro 5, e forçando o cilindro 5 para o interior do vazio 4. Quando a rotação B reduz ou para, os membros de desvio 23, 24 trazem o cilindro 5 de volta no sentido da barra 18 e para o desvio na posição de repouso.
[0073] As figuras 5A até 5D mostram como a modalidade mostrada nas figuras 2A até 2D podem ser combinadas com um desvio tal como uma mola 8 para combinar os efeitos de ambos, um deslocamento A axial em rampa 13 e um deslocamento A axial em desvio.
[0074] As figuras 6A até 6D ilustram como um componente de força centrífuga pode também ser usado para mudar as características do conjunto 1. No exemplo mostrado, um peso 11 pode ser conectado ao cilindro 5. Quando o cilindro 5 gira, o peso 11 também gira, e uma força centrífuga atua sobre o peso na direção F. Por meio de uma relação cinemática a força centrífuga F sobre o peso 11 pode ser traduzida para uma força axial A sobre o cilindro 5 para empurrar ou puxar o cilindro 5 para dentro ou para fora do tubo 2. A relação cinemática pode ser por meio de um arranjo de alavanca 12. Este meio de ajustar as características pode ser útil em certas modalidades.
[0075] Também como mostrado nas figuras 6A até 6D, um eixo 7 pode ser ligado a um carretel de linha 9 ao qual um objeto (não mostrado) tal como uma pessoa pode ser ligado. Quando uma força é aplicada sobre a linha e carretel 9 na direção X tal como o objeto caindo devido à gravidade, a linha é fornecida a partir do carretel 9 provocando a rotação do carretel 9 e eixo 7 na direção B conduzindo o cilindro 5 a mover para ou para longe do vazio 4 do tubo 2. À guisa de exemplo, uma pessoa pode ser o objeto que cai de uma altura. Por meio da gravidade o carretel 9 gira quando linha é fornecida a partir do carretel 9. Rotação do carretel 9 provoca a rotação do eixo 7 que, por sua vez, faz com que o cilindro 5 penetre no vazio 4 do tubo 2 que pode ser fixado em posição. As diferentes velocidades de rotação do tubo 2 e cilindro 5 fazem com que ocorra uma força de arraste de corrente de Foucault (não mostrado) que com isto reduz a queda da pessoa na linha.
[0076] As figuras 7A até 7D ilustram o mesmo arranjo centrífugo como nas figuras 6A até 6D, contudo, com a inclusão de um desvio 8 para auxiliar em trazer para dentro ou forçar para fora o cilindro 5 a partir do vazio 4 do tubo 2.
[0077] As figuras 8A até 8D ilustram um método alternativo de forçar translação axial A para o cilindro 5 utilizando ambos, força centrífuga e um método em rampa. Quando o eixo 7 gira, os pesos 15 são forçados a mover para fora na direção F, com isto atuando sobre a superfície rampa 15 do cilindro 5, provocando uma translação axial A do cilindro 5. Quando a velocidade de rotação B diminui, a força centrífuga F que atua sobre os pesos 15 diminui e o cilindro 5 retorna para uma posição não retraída.
[0078] As figuras 9A até 9D ilustram a mesma modalidade como nas figuras 8A até 8D, onde uma mola de desvio 8 é também usada para mudar as características do movimento axial A do cilindro 5 para dentro ou para fora do vazio 4 do tubo 2.
[0079] A figura 10 ilustra alguns outros arranjos alternativos do tubo 2 e cilindro 5. As modalidades descritas acima utilizam um tubo circular 2 com um vazio circular, porém o tubo 2 pode ter qualquer forma exterior poligonal tal como uma forma quadrada. A forma do vazio interior do tubo 2 pode ser circular como mostrado em figuras anteriores, poderia também ser elíptica, quadrada, hexagonal, e assim por diante. De maneira similar, figuras anteriores mostram um cilindro de seção transversal circular 5, porém o cilindro 5 pode assumir diversas formas e pode também ser oco.
[0080] Uma abordagem de parede de diversas camadas também pode ser usada.
[0081] Como mostrado nas figuras 11 até 13, o cilindro 50 é oco 51, e corresponde com um tubo 60 que tem um oco complementar 61. As paredes superpostas 52, 62 do cilindro e tubo podem conter magnetos e/ou membros condutores que permitem que ocorra variação em sintonização de corrente de Foucault. As figuras 11 e 12 ilustram um tubo de diversas camadas se aninhando com um cilindro oco 50 e duas configurações de magnetos alternados 63 sobre as paredes de tubo 62. A figura 13 ilustra uma abordagem de diversas paredes 52, 62 onde ambos, tubo 60 e cilindro 50 têm paredes concêntricas múltiplas 52, 62 que correspondem juntas.
[0082] Aspectos do conjunto e métodos de uso foram descritos à guisa de exemplo apenas, e deveria ser apreciado que modificações e adições podem ser feitas a eles sem se afastarem do escopo das reivindicações aqui.
Claims (19)
1. Conjunto (1), caracterizado pelo fato de compreender: um tubo (2, 60) que inclui uma parede interna e externa e um vazio (4) definido nele; e um cilindro (5, 50), o cilindro (5, 50) se movendo em relação ao tubo (2, 60) em uma translação axial (A) dentro e fora do vazio (4) do tubo (2, 60) e de maneira rotativa em relação ao tubo (2, 60), um eixo no qual o cilindro (5, 50) rotaciona ao redor; em que o tubo (2, 60), o cilindro (5, 50) e o eixo compartilham um eixo central comum de rotação; em que o tubo (2, 60) e o cilindro (5, 50) compreendem um ou mais membros condutivos e membros magnéticos, configurados de maneira que, quando o tubo (2, 60) e o cilindro (5, 50) têm velocidades relativas diferentes de rotação, forças de arraste de corrente de Foucault são produzidas entre os membros resistentes em relação a rotação (B) entre o tubo (2, 60) e o cilindro (5, 50) quando o tubo (2, 60) e o cilindro (5, 50) se sobrepõem; em que o movimento axial do cilindro (5, 50) é incitado por uma força axial imposta no cilindro (5, 50) como uma reação a um torque rotacional no eixo; e quando os ímãs do cilindro (5, 50) e do tubo (2, 60) e os condutores interagem entre si devido a uma sobreposição e velocidades de rotação relativa diferentes um para o outro, uma força de frenagem por corrente de Foucault é induzida contra diferente velocidade relativa de movimento do tubo (2, 60) e do cilindro (5, 50) com uma modulação da força de frenagem surgindo devido ao balanço das forças no tubo (2, 60) e no cilindro (5, 50) causadas tanto pelo movimento rotacional quando pelo movimento axial do tubo (2, 60) e do cilindro (5, 50) ao longo do eixo longitudinal a uma posição de equilíbrio do tubo (2, 60) e do cilindro (5, 50) axialmente e rotacionalmente para fornecer um torque de frenagem induzido por corrente de Foucault controlado.
2. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que o(s) membro(s) condutivo(s) está/estão no tubo (2, 60) ou o próprio tubo (2, 60) é um membro condutivo e o(s) membro(s) magnético(s) está/estão no cilindro (5, 50) ou o próprio cilindro (5, 50) é um membro magnético.
3. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que o(s) membro(s) condutivo(s) está/estão no cilindro (5, 50) ou o próprio cilindro (5, 50) condutivo e o(s) membro(s) magnético(s) estão/estão no tubo (2, 60) ou o próprio tubo (2, 60) é um membro magnético.
4. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que, antes do movimento axial do cilindro (5, 50), o tubo e o cilindro (5, 50) sobrepõem completa ou parcialmente um ao outro.
5. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que, antes do movimento axial do cilindro (5, 50), o tubo (2, 60) e o cilindro (5, 50) não se sobrepõem um ao outro.
6. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que o tubo (2, 60) é fixo em posição, o cilindro (5, 50) rotaciona, e como resultado da translação axial (A) do cilindro (5, 50), sobrepõe entre o tubo (2, 60) e o cilindro (5, 50), e diferenciando as velocidades de rotação relativas, as forças de corrente de Foucault são geradas entre o tubo (2, 60) e o cilindro (5, 50) criando uma força de arraste na rotação do cilindro (5, 50) fazendo com que ali a velocidade de rotação do cilindro (5, 50) reduza.
7. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que o tubo (2, 60) rotaciona na mesma direção que o cilindro (5, 50), mas em uma velocidade relativa diferente para o cilindro (5, 50) e, como resultado da translação axial (A) do cilindro (5, 50), sobrepõe o tubo (2, 60) e o cilindro (5, 50), e diferenciando as velocidades de rotação relativas, as forças de corrente de Foucault são geradas entre o tubo (2, 60) e o cilindro (5, 50) criando uma força de arraste na rotação do tubo (2, 60) e/ou cilindro (5, 50) fazendo com que a velocidade de rotação relativa do tubo (2, 60) e do cilindro (5, 50) reduza.
8. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que o tubo (2, 60) rotaciona em uma direção rotacional contrária ao cilindro (5, 50) e, como resultado da translação axial (A) do cilindro (5, 50), se sobrepõe entre o tubo (2, 60) e o cilindro (5, 50), e a rotação contrária, as forças de corrente de Foucault são geradas entre o tubo (2, 60) e o cilindro (5, 50) criando uma força de arraste na rotação do tubo (2, 60) e o cilindro (5, 50) fazendo com que ali a velocidade de rotação relativa do tubo (2, 60) e do cilindro (5, 50) reduza.
9. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que a força axial é imposta por uma ranhura helicoidal no eixo e, quando o eixo rotaciona, a ranhura helicoidal conduz a translação axial (A) do cilindro (5, 50) em relação ao tubo (2, 60).
10. Conjunto (1), de acordo com a reivindicação 9, caracterizado pelo fato de que a rosca da ranhura helicoidal ou o passo de parafuso condutor conduz a extensão e a taxa da translação axial (A) do cilindro (5, 50) em relação ao tubo (2, 60).
11. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que a força axial é imposta por uma superfície em rampa (16) sobre uma interface entre uma primeira seção de cilindro (5, 50) fixa ao eixo (7) e uma segunda seção de cilindro (5, 50) que é configurada para ser capaz de se mover axialmente ao longo do eixo longitudinal do eixo (7) e, quando o eixo (7) rotaciona, a interface da superfície em rampa (16) conduz o movimento axial da segunda seção de cilindro (5, 50) em relação ao tubo (2, 60).
12. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que a força axial é imposta pelo mecanismo de desvio (23, 24) e, quando o eixo (7) rotaciona, o mecanismo de desvio (23, 24) conduz o movimento axial do cilindro (5, 50) em relação ao tubo (2, 60).
13. Conjunto (1), de acordo com a reivindicação 12, caracterizado pelo fato de que o mecanismo de desvio (23, 24) é uma mola.
14. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que a força axial é imposta por um componente de força centrífuga, o componente de força centrífuga compreendendo um peso (11, 15) conectado ao cilindro (5, 50) e, quando o cilindro (5, 50) rotaciona, o peso (11, 15) também rotaciona e uma força de centrífuga age no peso (11, 15); e, através de um relacionamento cinemático, a força centrífuga no peso (11, 15) é traduzida em um movimento axial do cilindro (5, 50) em relação ao tubo (2, 60).
15. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que o eixo (7) é anexado a um carretel de linha (9) ao qual um objeto é anexado e, como uma força de torque é aplicada na linha e no carretel (9), a linha é fornecida a partir do carretel (9) causando a rotação do carretel (9) e do eixo (7) levando a rotação do cilindro (5, 50) e subsequente movimento axial no vazio (4) do tubo (2, 60) fazendo com que ali uma interação do freio de corrente de Foucault entre o cilindro (5, 50) e o tubo (2, 60) e diminuindo ali a rotação do cilindro (5, 50) e consequentemente o fornecimento da linha a partir do carretel (9).
16. Conjunto (1), de acordo com a reivindicação 1, caracterizado pelo fato de que o tubo (2, 60) compreende paredes concêntricas múltiplas (52, 62), as paredes concêntricas múltiplas (52, 62) aninhando dentro das aberturas concêntricas complementares do cilindro (5, 50).
17. Método de frear a queda de um objeto ou objetos, caracterizado pelo fato de que compreende: fornecer um conjunto (1) como definido na reivindicação 1; em que o eixo (7) é ligado a um carretel (9) ao qual o objeto ou objetos são anexados; e em que a força de frenagem de corrente de Foucault é gerada como resultado da força sendo aplicada na linha fazendo com que ali a linha seja fornecida a partir do carretel (9) e causando assim a rotação do carretel (9) e do eixo (7) que conduz ao cilindro (5, 50) que se desloca para dentro ou para fora do vazio (4) do tubo (2, 60), as velocidades de rotação relativas diferentes do cilindro (5, 50) e do tubo (2, 60) fazendo com que um ou mais membros condutivos e um ou mais membros magnéticos interajam um com o outro e para induzir a força de frenagem de corrente de Foucault contra velocidade de movimento relativa diferente do tubo (2, 60) e cilindro (5, 50) e consequentemente o carretel (9) e a linha, com uma modulação da força de frenagem que surge devido ao balanço das forças no tubo (2, 60) e cilindro (5, 50) causado tanto pelo movimento rotacional quanto pelo movimento axial do tubo (2, 60) e cilindro (5, 50) ao longo do eixo longitudinal para uma posição de equilíbrio do tubo (2, 60) e do cilindro (5, 50) axialmente e rotacionalmente para fornecer um torque de frenagem induzido por corrente de Foucault controlado que por sua vez diminui o fornecimento da linha a partir do carretel (9).
18. Método, de acordo com a reivindicação 17, caracterizado pelo fato de que a força de frenagem também reduz a velocidade de retração da linha suficiente para permitir uma linha completamente estendida com nada anexado à linha para retrair claramente.
19. Método, de acordo com a reivindicação 17, caracterizado pelo fato de que a faixa de torque aplicado cobre os objetos anexados à linha pesando de cerca de 9 a cerca de 150 quilogramas.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NZ619034 | 2013-12-16 | ||
| NZ61903413A NZ619034A (en) | 2013-12-16 | 2013-12-16 | An assembly to control relative speed of movement between parts |
| PCT/NZ2014/000245 WO2015093983A1 (en) | 2013-12-16 | 2014-12-16 | An assembly to control or govern relative speed of movement between parts |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112016013700A2 BR112016013700A2 (pt) | 2017-08-08 |
| BR112016013700B1 true BR112016013700B1 (pt) | 2022-03-03 |
Family
ID=52706699
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016013700-0A BR112016013700B1 (pt) | 2013-12-16 | 2014-12-16 | Conjunto e método de frear a queda de um objeto |
Country Status (12)
| Country | Link |
|---|---|
| US (4) | US10300397B2 (pt) |
| EP (2) | EP4389248A3 (pt) |
| JP (4) | JP6581089B2 (pt) |
| KR (4) | KR102316382B1 (pt) |
| CN (2) | CN114301259A (pt) |
| AU (5) | AU2014367356A1 (pt) |
| BR (1) | BR112016013700B1 (pt) |
| CA (1) | CA2933045C (pt) |
| MX (2) | MX2016007849A (pt) |
| NZ (1) | NZ619034A (pt) |
| SG (2) | SG10201805077SA (pt) |
| WO (1) | WO2015093983A1 (pt) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NZ575464A (en) | 2009-03-10 | 2010-07-30 | Holmes Solutions Ltd | Improvements in and relating to braking mechanisms |
| NZ619034A (en) * | 2013-12-16 | 2015-03-27 | Eddy Current Ltd Partnership | An assembly to control relative speed of movement between parts |
| SG10202103727PA (en) | 2014-08-18 | 2021-05-28 | Eddy Current Lp | Tuning of a kinematic relationship between members |
| EP3183805B1 (en) | 2014-08-18 | 2019-02-06 | Eddy Current Limited Partnership | Latching devices |
| KR102449222B1 (ko) | 2014-08-18 | 2022-09-28 | 에디 커런트 리미티드 파트너쉽 | 부재들 사이의 운동학적 관계의 조정 |
| CN107206977B (zh) | 2014-08-20 | 2020-06-02 | 特鲁布鲁有限公司 | 用于线性系统的涡流制动设备 |
| US11050336B2 (en) | 2014-12-04 | 2021-06-29 | Eddy Current Limited Partnership | Methods of altering eddy current interactions |
| WO2016089228A1 (en) | 2014-12-04 | 2016-06-09 | Eddy Current Limited Partnership | Eddy current brake configurations |
| EP3226978A4 (en) | 2014-12-04 | 2018-05-02 | Eddy Current Limited Partnership | Latch activation between elements |
| SG11201704352UA (en) | 2014-12-04 | 2017-06-29 | Eddy Current Ltd Partnership | Transmissions incorporating eddy current braking |
| KR102575004B1 (ko) | 2014-12-04 | 2023-09-04 | 에디 커런트 리미티드 파트너쉽 | 에너지 흡수 장치 |
| SG10202005459RA (en) | 2015-12-18 | 2020-07-29 | Eddy Current Lp | A variable behaviour control mechanism for a motive system |
| CN106422094A (zh) * | 2016-11-02 | 2017-02-22 | 上海凯悦安全消防器材有限公司 | 阻尼缓降器 |
| JP7022613B2 (ja) * | 2018-02-14 | 2022-02-18 | 株式会社Lixil | 制動装置 |
| JP6996398B2 (ja) * | 2018-04-06 | 2022-01-17 | 株式会社デンソー | バリ取り装置 |
| JP6893955B2 (ja) * | 2019-07-01 | 2021-06-23 | シナノケンシ株式会社 | ブレーキ付きモータ |
| USD989150S1 (en) | 2021-07-30 | 2023-06-13 | Microsoft Corporation | Camera |
| USD980897S1 (en) | 2021-07-30 | 2023-03-14 | Microsoft Corporation | Camera |
Family Cites Families (197)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2058024A (en) * | 1934-12-11 | 1936-10-20 | Westinghouse Air Brake Co | Eddy current brake |
| US2122315A (en) | 1936-06-11 | 1938-06-28 | Fosty Leopold | Fire escape |
| US2122312A (en) | 1937-05-25 | 1938-06-28 | Cassion John | Door attachment |
| US2437871A (en) * | 1943-02-09 | 1948-03-16 | Alfred R Wood | Magnetic coupling |
| FR925341A (pt) * | 1944-06-14 | 1947-09-16 | ||
| US2409009A (en) | 1945-07-24 | 1946-10-08 | Gen Electric | One-way drive with magnetic lock |
| US2492776A (en) * | 1948-08-11 | 1949-12-27 | Martin P Winther | Dynamoelectric machine |
| GB721748A (en) | 1950-06-22 | 1955-01-12 | Baermann Max | Improvements in or relating to permanent magnet brakes or clutches |
| GB719303A (en) * | 1951-06-11 | 1954-12-01 | Geoffrey John Eliot Howard | Eddy current coupling |
| US2807734A (en) * | 1954-11-22 | 1957-09-24 | Control Instr Company | Torque transmitting device |
| US2771171A (en) | 1955-07-06 | 1956-11-20 | Lab Equipment Corp | Magnetically activated torque coupling |
| GB908128A (en) | 1958-06-10 | 1962-10-17 | Andre Duban | Improvements in or relating to ratchet-and-pawl devices |
| FR1418814A (fr) | 1964-03-27 | 1965-11-26 | Renault | Perfectionnements aux dispositifs à courants de foucault pour la commande automatique des changements de rapports de vitesses sur véhicules |
| US3447006A (en) | 1967-09-28 | 1969-05-27 | Bliss Co | Electrodynamic brake of magnetic fluid type |
| DE2032935A1 (de) | 1970-07-03 | 1972-01-13 | Kabel Metallwerke Ghh | Vorrichtung zur Konstanthaltung von Geschwindigkeit und Zugkraft eines von einer Spule ablaufenden Drahtes |
| JPS4870052U (pt) * | 1971-12-08 | 1973-09-04 | ||
| US3868005A (en) * | 1973-03-14 | 1975-02-25 | Gen Electric | Friction clutch with centrifugal and magnetic speed control |
| DE2402748C2 (de) | 1974-01-21 | 1986-07-03 | Artur 7060 Schorndorf Föhl | Vorrichtung zur Einleitung der Spulenwellenblockierung eines Sicherheitsgurt- Aufrollautomaten |
| JPS5119269A (ja) * | 1974-08-07 | 1976-02-16 | Nippon Denso Co | Doryokudentatsusochi |
| JPS5172657U (pt) * | 1974-12-06 | 1976-06-08 | ||
| US3962595A (en) | 1974-12-20 | 1976-06-08 | W. J. Industries, Incorporated | Magnetic particle brake |
| JPS5252800A (en) * | 1975-10-24 | 1977-04-27 | Nishi Seisakusho:Kk | Lock |
| US4036428A (en) | 1976-04-29 | 1977-07-19 | Beckman Instruments, Inc. | Fluid pressure operated eddy current brake for air driven centrifuge |
| US4093186A (en) | 1976-11-22 | 1978-06-06 | Golden Steven T | Line brake device useful for fire escape |
| GB1599300A (en) | 1977-08-27 | 1981-09-30 | Ferranti Ltd | Speed control |
| JPS585495Y2 (ja) * | 1977-11-10 | 1983-01-29 | ダイワ精工株式会社 | 魚釣用リ−ルのブレ−キ装置 |
| US4271944A (en) | 1979-02-12 | 1981-06-09 | Hanson Douglas R | Single revolution torque limiting clutch |
| US4306688A (en) | 1979-02-22 | 1981-12-22 | Injecto Mold, Inc. | Hose reel assembly |
| US4434971A (en) | 1981-02-11 | 1984-03-06 | Armco Inc. | Drilling rig drawworks hook load overspeed preventing system |
| US4561605A (en) | 1981-12-25 | 1985-12-31 | Shimano Industrial Company Limited | Brake for a fishing reel |
| US4416430A (en) | 1982-02-01 | 1983-11-22 | Draft Systems, Inc. | Load lowering device |
| US4544111A (en) | 1982-03-09 | 1985-10-01 | Shimano Industrial Company Limited | Brake for a fishing reel |
| JPS59217589A (ja) | 1983-05-26 | 1984-12-07 | 株式会社宮野鉄工所 | 緩降機 |
| US4612469A (en) | 1983-11-10 | 1986-09-16 | Kabushiki Kaisha Sankyo Seiki Seisakusho | Speed governor |
| JPS60143512A (ja) | 1983-12-29 | 1985-07-29 | 株式会社日立製作所 | 超電導部材の製造方法 |
| JPS60259278A (ja) * | 1984-06-04 | 1985-12-21 | 神鋼電機株式会社 | 渦電流式ブレ−キを使用した降下装置 |
| JPS6115557A (ja) | 1984-06-30 | 1986-01-23 | Toshiba Corp | 浮上式搬送装置 |
| US4957644A (en) | 1986-05-13 | 1990-09-18 | Price John T | Magnetically controllable couplings containing ferrofluids |
| JPH0356684Y2 (pt) * | 1986-12-15 | 1991-12-20 | ||
| WO1988008635A1 (en) | 1987-04-30 | 1988-11-03 | Tokyo-Buhin Kogyo Co., Ltd. | Eddy current brake |
| CA1315328C (en) | 1988-10-31 | 1993-03-30 | Kenji Araki | Eddy current retarder |
| US4938435A (en) | 1988-12-30 | 1990-07-03 | Frost Engineering Development Corporation | Personnel lowering device |
| KR910021550A (ko) | 1990-02-02 | 1991-12-20 | 발터 쾰러 | 와이어 브레이크 |
| DE4018214A1 (de) | 1990-06-07 | 1991-12-12 | Harting Elektronik Gmbh | Vorrichtung zur elektromagnetischen betaetigung eines sperrmechanismus eines gurtaufrollers |
| JP2523883Y2 (ja) * | 1992-02-24 | 1997-01-29 | 株式会社三協精機製作所 | プーリ付調速器 |
| JPH05252800A (ja) * | 1992-02-28 | 1993-09-28 | Fuji Oozx Kk | 渦電流継手を用いた動力伝達装置の制御方法及び装置 |
| US5205386A (en) | 1992-03-05 | 1993-04-27 | United Technologies Corporation | Pawl and ratchet clutch with pawl holdback |
| JP3584473B2 (ja) | 1992-04-22 | 2004-11-04 | Fdk株式会社 | 磁気ダンパ装置 |
| DE9300966U1 (de) | 1993-01-25 | 1993-03-11 | Chen, Jeff, Shyong City | Drehmomentkontrollvorrichtung |
| US5477093A (en) * | 1993-05-21 | 1995-12-19 | Magna Force, Inc. | Permanent magnet coupling and transmission |
| US5712520A (en) | 1993-05-21 | 1998-01-27 | Magna Force, Inc. | Permanent magnet braking system |
| US5396140A (en) * | 1993-05-28 | 1995-03-07 | Satcon Technology, Corp. | Parallel air gap serial flux A.C. electrical machine |
| US5636804A (en) | 1993-10-05 | 1997-06-10 | Bando Leports, Ltd. | Double-bearing fishing reel |
| WO1995016496A1 (en) | 1993-12-14 | 1995-06-22 | Strickler James H | Sport climbing safety device |
| US5465815A (en) | 1994-01-10 | 1995-11-14 | Ikegami; Iwao | Magnetic brake |
| CA2178838C (en) | 1994-01-13 | 2003-08-12 | Leonard John Feathers | Speed responsive coupling device especially for fall arrest apparatus |
| EP0740570B1 (en) | 1994-01-18 | 1997-12-03 | Barrow Hepburn Sala Limited | Clutch mechanism for use in safety apparatus |
| JP2929517B2 (ja) | 1994-04-01 | 1999-08-03 | ダイワ精工株式会社 | 魚釣用リールのバックラッシュ防止装置 |
| US5441137A (en) | 1994-05-04 | 1995-08-15 | Eaton Corporation | Clutch with a centrifugally applied ball ramp actuator |
| US5862891A (en) | 1994-10-28 | 1999-01-26 | Knorr-Bremse Systeme Fur Scheinenfahrzeuge Gmbh | Electromagnetic or permanent-magnetic rail brake |
| US5862903A (en) | 1994-12-02 | 1999-01-26 | Itt Automotive Electrical Systems, Inc. | Centrifugal clutch for power door locks |
| JP3360281B2 (ja) | 1995-03-15 | 2002-12-24 | 株式会社アテックス | ベール径可変型ロールベーラ |
| DE29506374U1 (de) | 1995-04-13 | 1996-10-02 | FUNEX AG, Wollerau | Belustigungsvorrichtung |
| US5791584A (en) | 1996-01-25 | 1998-08-11 | Kuroiwa; Sachimasa | Tension control unit for filamentous material |
| JPH09275672A (ja) * | 1996-04-01 | 1997-10-21 | Akebono Brake Ind Co Ltd | うず電流式リターダ |
| US5822874A (en) | 1996-04-29 | 1998-10-20 | Nemes; Anne | Automatically retracting chalk line marking tool |
| DE19618903C2 (de) | 1996-05-10 | 1998-03-19 | Knorr Bremse Systeme | Magnetische Bremse, insbesondere lineare Wirbelstrombremse |
| JPH1098868A (ja) | 1996-09-24 | 1998-04-14 | Aichi Steel Works Ltd | 電磁ブレーキの磁極配列方式 |
| US5779178A (en) | 1996-11-07 | 1998-07-14 | Rostra Precision Controls, Inc. | Seat belt retractor assembly having magnetically actuated locking mechanism |
| JPH10140536A (ja) | 1996-11-12 | 1998-05-26 | Taisei Corp | 水中マット布設用架台と水中マット布設方法 |
| US5711404A (en) | 1997-02-05 | 1998-01-27 | Lee; Ying-Che | Magnetic adjustable loading device with eddy current |
| US5742986A (en) | 1997-02-13 | 1998-04-28 | Trw Inc. | Seat belt buckle with hall effect locking indicator and method of use |
| US6086005A (en) | 1997-03-11 | 2000-07-11 | Daiwa Seiko, Inc. | Fishing reel with magnetic force spool rotational-speed control during spool free rotational state |
| JPH10252025A (ja) | 1997-03-12 | 1998-09-22 | N D K:Kk | 自発光式道路鋲 |
| EP0976191A1 (en) | 1997-04-14 | 2000-02-02 | David A. Zornes | Magnet coupler having enhanced electromagnetic torque |
| JP3835014B2 (ja) | 1997-10-20 | 2006-10-18 | 東亞合成株式会社 | 硬化性組成物 |
| JPH11119680A (ja) | 1997-10-20 | 1999-04-30 | Ricoh Co Ltd | 液晶表示装置 |
| US5928300A (en) | 1997-10-30 | 1999-07-27 | Simula Inc. | Three-axis aircraft crash sensing system |
| JP3961668B2 (ja) | 1998-05-06 | 2007-08-22 | 美和ロック株式会社 | 引戸のクローザ |
| US6042517A (en) | 1998-09-10 | 2000-03-28 | Bell Sports, Inc. | Bicycle trainer magnetic resistance device |
| DE19859445C2 (de) | 1998-12-22 | 2001-01-11 | Asm Automation Sensorik Messte | Meßseil-Wegsensor mit einem Längsantrieb für die Seiltrommel |
| DE19951221A1 (de) | 1999-04-01 | 2000-10-05 | Mannesmann Ag | Windwerk, insbesondere Hebezeug, mit einem Gehäuse |
| JP2000316272A (ja) | 1999-04-27 | 2000-11-14 | Topre Corp | 自転車の最高速度制限装置 |
| US6051897A (en) | 1999-05-05 | 2000-04-18 | Synchro-Start Products, Inc. | Solenoid actuator with positional feedback |
| JP2001017041A (ja) | 1999-07-02 | 2001-01-23 | Akebono Brake Ind Co Ltd | 両軸リール用ブレーキ機構 |
| GB2352645B (en) | 1999-07-21 | 2004-01-14 | Yu-Peng Chen | Magnetic damping device for an exercising device |
| DE29912725U1 (de) | 1999-07-21 | 1999-10-07 | Chen, Yu-Peng, Taichung | Magnetische Dämpfungseinrichtung für ein Übungsgerät |
| GB2352784A (en) | 1999-08-04 | 2001-02-07 | Moog Inc | Energy-absorbing brake |
| GB2354645A (en) | 1999-09-27 | 2001-03-28 | Cooper Technologies Co | Low profile fuse |
| US20060278478A1 (en) | 1999-11-22 | 2006-12-14 | Pribonic Edward M | Eddy current braking apparatus with adjustable braking force |
| US20040055836A1 (en) | 1999-11-22 | 2004-03-25 | Pribonic Edward M. | Eddy current braking apparatus with adjustable braking force |
| US6293376B1 (en) | 1999-11-22 | 2001-09-25 | Magnetar Technologies Ltd | Apparatus including eddy current braking system |
| GB2357563B (en) | 1999-12-21 | 2002-04-03 | Latchways Plc | Energy absorber |
| US6533083B1 (en) | 2000-02-15 | 2003-03-18 | Magnetar Technologies, Inc | Eddy current braking apparatus |
| AU2001241473A1 (en) | 2000-02-15 | 2001-08-27 | Magnetar Technologies Ltd. | Eddy current braking apparatus |
| DE20003513U1 (de) | 2000-02-28 | 2001-07-26 | Wirth Maschinen- und Bohrgeräte-Fabrik GmbH, 41812 Erkelenz | Hebewerk |
| WO2002004075A2 (en) | 2000-07-06 | 2002-01-17 | Rose Manufacturing Company | Controlled descent device |
| US6412611B1 (en) | 2000-07-17 | 2002-07-02 | Magnetar Technologies, Ltd | Eddy current brake system with dual use conductor fin |
| DE60141315D1 (de) | 2000-09-18 | 2010-04-01 | Isuzu Motors Ltd | Wirbelstrombremse mit einem Magnet bestehend aus einem Elektromagnet und einem Dauermagnet |
| US20040050641A1 (en) | 2000-09-29 | 2004-03-18 | Feng Jin | Overrunning clutch |
| US20020162477A1 (en) | 2001-03-02 | 2002-11-07 | Emiliano Palumbo | Dual cable zipline having mechanical ascension and braking systems |
| US6764505B1 (en) | 2001-04-12 | 2004-07-20 | Advanced Cardiovascular Systems, Inc. | Variable surface area stent |
| US7014026B2 (en) | 2001-06-07 | 2006-03-21 | Drussel Wilfley Design, L.L.C. | Manual/automatic pressure control mechanism for centrifugal clutch |
| DE10149112B4 (de) | 2001-10-05 | 2004-11-25 | Robert Bosch Gmbh | Verfahren zur Bestimmung einer Auslöseentscheidung für Rückhaltemittel in einem Fahrzeug |
| US6557673B1 (en) | 2001-12-21 | 2003-05-06 | Visteon Global Technologies, Inc. | Integral park brake/eddy current brake assembly |
| US6698554B2 (en) * | 2001-12-21 | 2004-03-02 | Visteon Global Technologies, Inc. | Eddy current brake system |
| WO2003055560A1 (de) | 2001-12-28 | 2003-07-10 | Suter Racing International Ag | Abseilvorrichtung als rettungsgerät für katastrophenfälle, insbesondere brandfälle bei gebäuden oder hochhäusern |
| US7011607B2 (en) | 2002-01-23 | 2006-03-14 | Saris Cycling Group, Inc. | Variable magnetic resistance unit for an exercise device |
| AU2003248345A1 (en) | 2002-02-28 | 2003-09-09 | Sumitomo Metal Industries, Ltd. | Eddy current speed reducer |
| US6723017B2 (en) | 2002-05-09 | 2004-04-20 | Visteon Global Technologies, Inc. | Differential assembly |
| EP1401087A1 (en) | 2002-09-20 | 2004-03-24 | Tai-Her Yang | Axially movable rotor |
| EP1432101B1 (en) | 2002-12-20 | 2019-03-20 | Tai-Her Yang | Electrical machine with structure for axially moving the rotor using centrifugal force |
| TWI298621B (en) | 2003-01-06 | 2008-07-11 | Shimano Kk | Braking device for a dual bearing reel |
| TW572477U (en) * | 2003-01-08 | 2004-01-11 | Huang-Dung Jang | Magnetic force sensing coupler |
| GB2398054B (en) | 2003-01-24 | 2005-08-03 | Ropepower Ltd | Powered rope climbing apparatus |
| WO2004073928A2 (en) | 2003-02-19 | 2004-09-02 | Archer Daniels Midland Company | Methods and composition for dust and erosion control |
| JP2007524428A (ja) | 2003-02-21 | 2007-08-30 | ライフパック テクノロジィーズ インコーポレイテッド | 建物から外部へ避難するための装置 |
| JP4067995B2 (ja) | 2003-03-28 | 2008-03-26 | ヒタチグローバルストレージテクノロジーズネザーランドビーブイ | 回転円板型記憶装置並びにアクチュエータ・サスペンション・アセンブリの解放方法 |
| TWM251925U (en) | 2003-08-21 | 2004-12-01 | Jung-Rung Shie | Brake structure for rolling door |
| DE102004007434A1 (de) | 2004-02-16 | 2005-09-22 | Minebea Co., Ltd. | Elektrische Maschine |
| US7294947B2 (en) * | 2004-03-01 | 2007-11-13 | Flux Drive, Inc. | Apparatus for transferring torque magnetically |
| WO2005090037A1 (en) | 2004-03-12 | 2005-09-29 | Intellipack | Hand held dispenser |
| DE102004013836A1 (de) | 2004-03-16 | 2005-10-06 | Bielomatik Leuze Gmbh + Co.Kg | Verfahren zum Rotationsreibschweißen von Kunststoffteilen sowie Vorrichtung zur Durchführung des Verfahrens |
| WO2005105656A1 (en) | 2004-04-29 | 2005-11-10 | Terex-Demag Gmbh & Co.Kg | A rope winding system for winding and unwinding steel ropes of cranes |
| US8727078B2 (en) | 2004-05-28 | 2014-05-20 | Velocity Magnetics, Inc. | Selectively incrementally actuated linear eddy current braking system |
| GB2415818B (en) | 2004-06-30 | 2008-12-31 | Autoliv Dev | Arrangement for triggering a vehicle safety device |
| JP4620404B2 (ja) | 2004-08-02 | 2011-01-26 | アサヒビール株式会社 | 酵母変異株、グルタチオン高含有酵母の製造方法、その培養物、その分画物、酵母エキスおよびグルタチオン含有飲食品 |
| US20100211239A1 (en) | 2004-08-06 | 2010-08-19 | Christensen Ladd E | Towrope Winch Dead Start |
| CN1783674A (zh) * | 2004-11-24 | 2006-06-07 | 乐金电子(天津)电器有限公司 | 圆筒型涡电流轴连接装置 |
| US7018324B1 (en) | 2004-11-30 | 2006-03-28 | Lily Lin | Magnetic controlled loading device in combination of a power generating set and an adjusting drive mechanism |
| DE102005036570A1 (de) | 2004-12-16 | 2006-07-06 | Steinert Elektromagnetbau Gmbh | Verfahren zur Abbremsung eines laufenden Metallbandes und Anlage zur Durchführung des Verfahrens |
| GB0507806D0 (en) | 2005-04-19 | 2005-05-25 | Bm Engineering Uk Ltd | Belay device |
| US8079569B2 (en) | 2005-04-29 | 2011-12-20 | Gerald Lesko | Cable drawworks for a drilling rig |
| US20070001048A1 (en) | 2005-05-18 | 2007-01-04 | Wooster Peter C | Descent device |
| WO2007005560A2 (en) | 2005-06-30 | 2007-01-11 | Magnetar Technologies Corp. | Axial rotary eddy current brake with adjustable braking force |
| DE102005032694A1 (de) | 2005-07-13 | 2007-01-18 | Forhouse Corp., Shenkang | Lastregler einer Magnetbremse für ein Übungsgerät |
| GB2432140A (en) | 2005-11-15 | 2007-05-16 | Latchways Plc | Fall arrest safety device |
| US20070135561A1 (en) | 2005-12-08 | 2007-06-14 | Christian Rath | Method of dust abatement |
| JP2007276540A (ja) | 2006-04-03 | 2007-10-25 | Honda Motor Co Ltd | 車両の乗員拘束装置 |
| US7367869B2 (en) | 2006-05-02 | 2008-05-06 | U.S. Technology Corporation | Method of masking and a hot melt adhesive for use therewith |
| US7528514B2 (en) | 2006-06-22 | 2009-05-05 | International Business Machines Corporation | Centrifugal magnetic clutch |
| WO2008008225A2 (en) | 2006-07-10 | 2008-01-17 | Sigma Industries, Llc | Retractable lifeline safety device |
| US20080074223A1 (en) | 2006-09-22 | 2008-03-27 | Pribonic Edward M | Reinforcing of permanent magnet arrays |
| US7984796B2 (en) | 2006-10-13 | 2011-07-26 | Magnetar Technologies Corp. | Motion retarding system and method |
| US7843349B2 (en) | 2006-11-03 | 2010-11-30 | D B Industries, Inc. | Retrofittable radio frequency identification connector |
| US20080105503A1 (en) | 2006-11-08 | 2008-05-08 | Pribonic Edward M | Axial rotary eddy current brake with self-adjustable braking force |
| GB2451799B (en) | 2007-05-16 | 2011-12-14 | Latchways Plc | Safety device |
| EP2175851B1 (en) | 2007-07-12 | 2013-05-15 | Oral Health Australia Pty Ltd | Biofilm treatment |
| WO2009011921A1 (en) | 2007-07-18 | 2009-01-22 | Stone Kevin R | Personal escape device and methods for using same |
| US8893854B2 (en) | 2007-09-28 | 2014-11-25 | D B Industries, Llc | Retractable lifeline assembly |
| CN101820952B (zh) | 2007-10-12 | 2012-09-05 | 拉奇韦斯公开有限公司 | 旋转能量吸收器和跌落制动系统 |
| US8272476B2 (en) | 2007-12-10 | 2012-09-25 | Rapid Egress Descent Systems Ltd. | Descent control device |
| US9016432B2 (en) | 2007-12-10 | 2015-04-28 | Rapid Egress Descent Systems Ltd. | Descent control device |
| JP5122273B2 (ja) | 2007-12-28 | 2013-01-16 | 株式会社シマノ | 両軸受リールのスプール制動装置 |
| EP2249927B1 (en) | 2008-02-27 | 2011-12-28 | Rapid Vertical Egress System Holding B.v. | Rescue arrangement |
| CN101559267A (zh) | 2008-04-18 | 2009-10-21 | 陈锦鹏 | 一种防坠落设备及系统 |
| US8847464B2 (en) * | 2008-06-12 | 2014-09-30 | General Electric Company | Electrical machine with improved stator flux pattern across a rotor that permits higher torque density |
| US10001804B2 (en) | 2008-08-11 | 2018-06-19 | Force Dimension S.A.R.L. | Force-feedback device and method |
| US20100112224A1 (en) | 2008-10-30 | 2010-05-06 | James A Lott | Methods and formulations for protection ans dust control involving bulk material |
| US20100116922A1 (en) | 2008-11-13 | 2010-05-13 | Reliance Industries, Llc | Cable reel lock for fall arrestor |
| NZ575464A (en) | 2009-03-10 | 2010-07-30 | Holmes Solutions Ltd | Improvements in and relating to braking mechanisms |
| RU106462U1 (ru) * | 2009-09-15 | 2011-07-10 | Государственное образовательное учреждение высшего профессионального образования "Уфимский государственный авиационный технический университет" | Малоинерционный индукционный тормоз |
| US8324774B2 (en) | 2009-10-09 | 2012-12-04 | Toyota Jidosha Kabushiki Kaisha | Rotating electrical machine apparatus |
| US8226024B2 (en) | 2009-10-14 | 2012-07-24 | D B Industries, Inc. | Self-retracting lifeline with reserve lifeline portion |
| US8556234B2 (en) | 2009-11-13 | 2013-10-15 | Ride Inc. | Single cable descent control device |
| WO2011079266A2 (en) * | 2009-12-23 | 2011-06-30 | D B Industries, Inc. | Fall protection safety device with a braking mechanism |
| US20110174914A1 (en) | 2010-01-20 | 2011-07-21 | Gimmal Co., Ltd. | Connector device to prevent person from falling |
| GB201002854D0 (en) * | 2010-02-19 | 2010-04-07 | Wavefront Reservoir Technologies Ltd | Magnet - operated pulsing tool |
| US20110240403A1 (en) | 2010-03-31 | 2011-10-06 | D B Industries, Inc. | Lifeline Connector for Use with Self-Retracting Lifeline with Disconnectable Lifeline |
| EP2377783A1 (de) | 2010-04-14 | 2011-10-19 | Interroll Holding AG | Förderrolle mit Fliehkraftbetätigter Magnetbremse. |
| US9199103B2 (en) | 2010-05-12 | 2015-12-01 | Msa Technology, Llc | Fall protection arrangement |
| CN102893505B (zh) * | 2010-05-17 | 2015-05-20 | 日立金属株式会社 | 耦合装置 |
| US8469149B2 (en) | 2010-06-07 | 2013-06-25 | D B Industries, Llc | Self-retracting lifeline with disconnectable lifeline |
| WO2012068420A2 (en) * | 2010-11-17 | 2012-05-24 | Reliance Industries, Llc | Retractable fall arrester with component assembly and cantilevered main shaft |
| US8424460B2 (en) | 2010-12-28 | 2013-04-23 | Shawn Geoffrey LERNER | Trolley for downhill zip line thrill ride |
| CN103717265B (zh) | 2011-06-29 | 2016-01-13 | 关键安全体系股份有限公司 | 防坠器 |
| CN202203305U (zh) | 2011-08-01 | 2012-04-25 | 台州市黄岩华阳机电科技有限公司 | 离心式离合器和具有该离合器的电动车变挡驱动轮毂 |
| WO2013047222A1 (ja) | 2011-09-27 | 2013-04-04 | ナブテスコ株式会社 | 車両の速度抑制装置及び速度抑制装置を備えた車両 |
| US9033115B2 (en) * | 2011-11-11 | 2015-05-19 | Shawn Lerner | Zip line braking |
| US8601951B2 (en) | 2011-11-11 | 2013-12-10 | Shawn Lerner | Self-cooling trolley |
| CN102497085A (zh) | 2011-12-23 | 2012-06-13 | 浙江大学 | 一种基于Halbach阵列的永磁涡流缓速器 |
| US8857578B2 (en) | 2012-01-19 | 2014-10-14 | Technical Film Systems, Inc. | Magnetic brake |
| DE102012202553A1 (de) | 2012-02-20 | 2013-08-22 | Carl Zeiss Smt Gmbh | Lithographievorrichtung mit dämpfungsvorrichtung |
| CN102627063B (zh) | 2012-03-05 | 2014-05-28 | 江苏大学 | 电磁馈能型半主动悬架运动方向实时控制装置及方法 |
| US20140110947A1 (en) | 2012-10-24 | 2014-04-24 | Vestas Wind Systems A/S | Wind turbine generator having an eddy current brake, wind turbine having such a generator, and associated methods |
| CN103127627B (zh) | 2013-01-30 | 2015-07-08 | 黄柏源 | 一种双制动往返可控式缓降器 |
| CN103244577A (zh) | 2013-04-27 | 2013-08-14 | 上海法诺格绿色能源系统有限公司 | 超越离合器 |
| CN103326538B (zh) * | 2013-06-25 | 2016-01-20 | 常州市博能节能科技有限公司 | 永磁智能调速节能装置 |
| NZ619034A (en) * | 2013-12-16 | 2015-03-27 | Eddy Current Ltd Partnership | An assembly to control relative speed of movement between parts |
| US10046745B2 (en) | 2014-03-20 | 2018-08-14 | TruBlue LLC | Cable-traversing trolley adapted for use with impact braking |
| EP3183805B1 (en) | 2014-08-18 | 2019-02-06 | Eddy Current Limited Partnership | Latching devices |
| SG10202103727PA (en) | 2014-08-18 | 2021-05-28 | Eddy Current Lp | Tuning of a kinematic relationship between members |
| KR102449222B1 (ko) | 2014-08-18 | 2022-09-28 | 에디 커런트 리미티드 파트너쉽 | 부재들 사이의 운동학적 관계의 조정 |
| EP3226978A4 (en) | 2014-12-04 | 2018-05-02 | Eddy Current Limited Partnership | Latch activation between elements |
| CN106887940A (zh) | 2016-06-13 | 2017-06-23 | 裴承华 | 一种自冷式永磁涡流柔性传动调速器 |
| US9723823B2 (en) | 2016-08-29 | 2017-08-08 | Terry Richardson | Fishing line dispenser |
| US10958191B2 (en) * | 2018-02-15 | 2021-03-23 | The Charles Stark Draper Laboratory, Inc. | Electrostatic motor |
-
2013
- 2013-12-16 NZ NZ61903413A patent/NZ619034A/en unknown
-
2014
- 2014-12-16 KR KR1020167017695A patent/KR102316382B1/ko active IP Right Grant
- 2014-12-16 WO PCT/NZ2014/000245 patent/WO2015093983A1/en active Application Filing
- 2014-12-16 CN CN202111254914.7A patent/CN114301259A/zh active Pending
- 2014-12-16 KR KR1020227019061A patent/KR102547218B1/ko active IP Right Grant
- 2014-12-16 CN CN201480075517.5A patent/CN105993120A/zh active Pending
- 2014-12-16 EP EP24160077.4A patent/EP4389248A3/en active Pending
- 2014-12-16 SG SG10201805077SA patent/SG10201805077SA/en unknown
- 2014-12-16 CA CA2933045A patent/CA2933045C/en active Active
- 2014-12-16 SG SG11201604807TA patent/SG11201604807TA/en unknown
- 2014-12-16 JP JP2016538788A patent/JP6581089B2/ja active Active
- 2014-12-16 BR BR112016013700-0A patent/BR112016013700B1/pt active IP Right Grant
- 2014-12-16 KR KR1020217033498A patent/KR102409249B1/ko active IP Right Grant
- 2014-12-16 US US15/104,949 patent/US10300397B2/en active Active
- 2014-12-16 MX MX2016007849A patent/MX2016007849A/es active IP Right Grant
- 2014-12-16 EP EP14872681.3A patent/EP3084941B1/en active Active
- 2014-12-16 AU AU2014367356A patent/AU2014367356A1/en not_active Abandoned
- 2014-12-16 KR KR1020237020782A patent/KR102703493B1/ko active IP Right Grant
-
2016
- 2016-06-15 MX MX2020011623A patent/MX2020011623A/es unknown
-
2019
- 2019-02-26 AU AU2019201311A patent/AU2019201311B2/en active Active
- 2019-04-08 US US16/378,463 patent/US10603596B2/en active Active
- 2019-08-29 JP JP2019156868A patent/JP6962977B2/ja active Active
-
2020
- 2020-02-24 US US16/799,339 patent/US11266917B2/en active Active
-
2021
- 2021-06-23 AU AU2021204270A patent/AU2021204270B2/en active Active
- 2021-10-14 JP JP2021168761A patent/JP7184993B2/ja active Active
-
2022
- 2022-02-17 US US17/651,521 patent/US11628373B2/en active Active
- 2022-08-15 AU AU2022218456A patent/AU2022218456B2/en active Active
- 2022-11-24 JP JP2022187386A patent/JP7381166B2/ja active Active
-
2024
- 2024-04-02 AU AU2024202100A patent/AU2024202100A1/en active Pending
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016013700B1 (pt) | Conjunto e método de frear a queda de um objeto | |
| US12009721B2 (en) | Eddy current brake configurations | |
| BR112017003208B1 (pt) | Dispositivo, dispositivo de dispensa de linha, contenção de assento de passageiro, acionamento de transmissão e corda de segurança guiada linear | |
| JP2023164785A (ja) | 渦電流制動を組み込んだ伝達機構を含むジップライントロリー又はキャリッジ | |
| BR112017003080B1 (pt) | Dispositivos de travamento | |
| JP2017505094A5 (pt) | ||
| NZ713672A (en) | Eddy current brake configurations |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 16/12/2014, OBSERVADAS AS CONDICOES LEGAIS. |