WO2018092830A1 - 光学走査装置及び画像形成装置 - Google Patents
光学走査装置及び画像形成装置 Download PDFInfo
- Publication number
- WO2018092830A1 WO2018092830A1 PCT/JP2017/041213 JP2017041213W WO2018092830A1 WO 2018092830 A1 WO2018092830 A1 WO 2018092830A1 JP 2017041213 W JP2017041213 W JP 2017041213W WO 2018092830 A1 WO2018092830 A1 WO 2018092830A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- light source
- straight line
- scanning device
- control substrate
- optical scanning
- Prior art date
Links
Images













Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/04—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material
- G03G15/04036—Details of illuminating systems, e.g. lamps, reflectors
- G03G15/04045—Details of illuminating systems, e.g. lamps, reflectors for exposing image information provided otherwise than by directly projecting the original image onto the photoconductive recording material, e.g. digital copiers
- G03G15/04072—Details of illuminating systems, e.g. lamps, reflectors for exposing image information provided otherwise than by directly projecting the original image onto the photoconductive recording material, e.g. digital copiers by laser
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J2/00—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed
- B41J2/435—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by selective application of radiation to a printing material or impression-transfer material
- B41J2/47—Typewriters or selective printing mechanisms characterised by the printing or marking process for which they are designed characterised by selective application of radiation to a printing material or impression-transfer material using the combination of scanning and modulation of light
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/12—Scanning systems using multifaceted mirrors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/12—Scanning systems using multifaceted mirrors
- G02B26/121—Mechanical drive devices for polygonal mirrors
- G02B26/122—Control of the scanning speed of the polygonal mirror
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B26/00—Optical devices or arrangements for the control of light using movable or deformable optical elements
- G02B26/08—Optical devices or arrangements for the control of light using movable or deformable optical elements for controlling the direction of light
- G02B26/10—Scanning systems
- G02B26/12—Scanning systems using multifaceted mirrors
- G02B26/127—Adaptive control of the scanning light beam, e.g. using the feedback from one or more detectors
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B5/00—Optical elements other than lenses
- G02B5/08—Mirrors
- G02B5/09—Multifaceted or polygonal mirrors, e.g. polygonal scanning mirrors; Fresnel mirrors
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/04—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material
- G03G15/043—Apparatus for electrographic processes using a charge pattern for exposing, i.e. imagewise exposure by optically projecting the original image on a photoconductive recording material with means for controlling illumination or exposure
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/04—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa
- H04N1/113—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using oscillating or rotating mirrors
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/55—Self-diagnostics; Malfunction or lifetime display
Definitions
- the present invention relates to an optical scanning device used in an image forming apparatus such as a copying machine, a printer, and a facsimile machine.
- An optical scanning device used in an image forming apparatus such as a copying machine, a printer, or a facsimile machine performs light modulation on a laser beam emitted from a light source according to an image signal, and a light beam which is light modulated.
- Deflection scanning is performed with a deflector.
- the deflected laser beam is imaged on the surface of the photosensitive drum by a scanning lens such as an f ⁇ lens to form an electrostatic latent image.
- the developing agent supplies a developer to the electrostatic latent image formed on the surface of the photosensitive drum to develop it as a toner image to develop the image, which is transferred onto a recording material such as paper and sent to a fixing device.
- Printing is performed by heating and fixing the toner image on the recording material.
- the laser light flux emitted from the light source is subjected to deflection scanning with a light deflector comprising a rotary polygon mirror.
- a control substrate is mounted on which a BD (Beam Detect) sensor for receiving a laser beam and generating a horizontal synchronization signal is mounted.
- the control board is connected to the light source.
- the control substrate is fixed to the outer wall of the optical box of the optical scanning device by screws.
- Patent Documents 1 and 2 have the following problems.
- the electronic components on the control substrate are reflowed (soldered).
- the reflow soldering is to heat, melt and solder the solder which has been previously applied at normal temperature.
- the heat at the time of the reflow soldering may cause warpage in the control substrate.
- the control substrate may be warped depending on the seating surface accuracy of the fixed seating surface.
- the control substrate on which the BD sensor is mounted is fixed to the optical box by screws.
- the fixed point is located away from the BD sensor, and the position of the BD sensor is shifted in the warp direction due to the influence of the warp of the control substrate.
- the timing of generating a horizontal synchronization signal for controlling the image writing position may shift due to the effect of the warp.
- the present invention solves the above-mentioned problems, and an object of the present invention is to form an image with a stable image writing position by reliably and accurately positioning detection means for generating a horizontal synchronization signal on an optical box.
- an optical scanning device capable of
- a typical configuration of an optical scanning device comprises: a light source; a deflector having a rotary polygon mirror for deflecting and scanning a light beam emitted from the light source;
- the detection means comprises: detection means for detecting the write-out position of the light beam reflected by the mirror, a control substrate electrically connected to the light source, and an optical box for accommodating the deflector.
- the control substrate is fixed to the control board, and the control substrate is fixed to the optical box by fixing means, and at least one of the fixing means is relative to a first straight line connecting the light source and the detection means. It is characterized in that it is disposed on a second straight line orthogonal to and passing through the detection means fixed to the control substrate.
- the detection means for generating the horizontal synchronization signal can be accurately and accurately positioned on the optical box, and an image having a stable image writing position can be formed.
- FIG. 1 is a cross-sectional explanatory view showing the configuration of an image forming apparatus provided with an optical scanning device according to the present invention. It is a perspective view showing the composition of the optical scanning device concerning the present invention. It is side explanatory drawing which shows the positional relationship of the control board in 1st Embodiment, BD sensor, and fixing screw. It is a disassembled perspective view which shows the positional relationship of the control board in 1st Embodiment, an optical box, and fixing screw.
- FIG. 5 is a cross-sectional view taken along the line BB in FIG. 3 showing the positional relationship between the light receiving surface of the BD sensor and the control substrate in the first embodiment.
- FIG. 4 is a cross-sectional view taken along the line BB in FIG. 3 showing the positional relationship between the light receiving surface of the BD sensor and the laser beam incident on the light receiving surface.
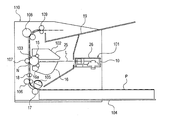
- FIG. 1 is a cross-sectional explanatory view showing the configuration of an image forming apparatus provided with an optical scanning device 101 according to the present invention.
- An image forming apparatus 110 shown in FIG. 1 is an example of an electrophotographic laser printer.
- An image forming apparatus 110 shown in FIG. 1 includes an optical scanning device 101.
- the image forming apparatus 110 includes an image forming unit that forms an image on the recording material P based on the image exposed and scanned on the surface of the photosensitive drum 103 serving as an image carrier by the optical scanning device 101.
- the laser light flux L (light flux) emitted from the optical scanning device 101 is scan-exposed on the surface of the photosensitive drum 103 to form an electrostatic latent image.
- An image forming apparatus 110 shown in FIG. 1 emits a laser beam L based on the obtained image information by an optical scanning device 101 as an exposure unit, and a photosensitive drum 103 as an image carrier incorporated in the process cartridge 102. Irradiate on the surface.
- the process cartridge 102 is integrally provided with a photosensitive drum 103, a charging roller 15 serving as a charging unit as an image forming process unit acting on the photosensitive drum 103, a developing device 16 serving as a developing unit, and a cleaner 25 serving as a cleaning unit. It is done.
- the process cartridge 102 is detachably provided to the main body of the image forming apparatus 110.
- the surface of the photosensitive drum 103 as an image carrier rotating in the clockwise direction in FIG. 1 is uniformly charged by the charging roller 15 as a charging unit.
- the laser beam L according to the image information is exposed and scanned by the optical scanning device 101 on the surface of the uniformly charged photosensitive drum 103.
- an electrostatic latent image corresponding to the image information is formed on the surface of the photosensitive drum 103.
- the electrostatic latent image formed on the surface of the photosensitive drum 103 is supplied with a developer by a developing roller 16a serving as a developer carrying member provided in a developing device 16 serving as a developing unit, and is developed as a toner image.
- the recording material P accommodated in the feeding cassette 104 is fed out by the feeding roller 105 and separated and fed one by one in cooperation with the separation roller 17. Further, the leading end portion is in contact with the nip portion of the registration roller 18 which is nipped and conveyed by the conveyance roller 106 and stopped. The skew of the recording material P is corrected by being handled by the stiffness of the recording material P.
- the registration roller 18 rotates in synchronization with the timing when the toner image formed on the surface of the photosensitive drum 103 reaches the transfer nip N formed by the surface of the photosensitive drum 103 and the transfer roller 107 serving as the transfer means. .
- the recording material P is nipped by the registration roller 18 and conveyed to the transfer nip N.
- a transfer bias is applied to the transfer roller 107 by a transfer bias power supply (not shown), and the toner image formed on the surface of the photosensitive drum 103 is transferred onto the recording material P.
- the residual toner remaining on the surface of the photosensitive drum 103 after transfer is removed by the cleaner 25 and collected.
- the recording material P on which an unfixed toner image is formed is nipped by the photosensitive drum 103 and the transfer roller 107 and conveyed to a fixing device 108 serving as a fixing unit.
- a fixing device 108 serving as a fixing unit.
- the toner image is thermally fused by being heated and pressurized, and the toner image is thermally fixed on the recording material P.
- the recording material P nipped and conveyed by the fixing roller and the pressure roller of the fixing device 108 is discharged by the discharge roller 109 onto the discharge tray 19 provided outside the apparatus.
- the charging roller 15 serving as a charging unit serving as an image forming process unit acting on the photosensitive drum 103 and the developing device 16 serving as a developing unit are provided integrally with the photosensitive drum 103 inside the process cartridge 102.
- each image forming process unit can be configured separately from the photosensitive drum 103.
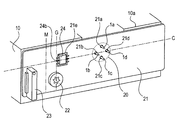
- FIG. 2 is a perspective view showing the configuration of the optical scanning device 101 according to the present invention.
- a semiconductor laser unit 1 is a light source for emitting a laser beam L.
- the anamorphic collimator lens 2 is formed by integrating a collimator lens and a cylindrical lens.
- the aperture 3 is an optical stop that shapes the laser beam L into a predetermined shape.
- the deflector 5 rotationally drives the rotary polygon mirror 4.
- the deflector 5 includes a rotary polygon mirror 4 for deflecting the laser light flux L (light flux) emitted from the semiconductor laser unit 1 (light source).
- the BD (Beam Detect) sensor 6 is a detection unit that detects a writing position of the laser light flux L (light flux) reflected by the rotary polygon mirror 4.
- the control substrate 7 is electrically connected to the semiconductor laser unit 1 (light source).
- the signal transmission connector 8 is provided on the control board 7.
- the f ⁇ lens 9 is a scanning lens.
- the f ⁇ lens 9 has a lens characteristic (f ⁇ characteristic) that forms an image of a size (f ⁇ ⁇ ) obtained by multiplying the focal length f of the f ⁇ lens 9 when the laser beam L enters at an angle ⁇ . Have.
- the optical box 10 accommodates a semiconductor laser unit 1 (light source), an anamorphic collimator lens 2, an aperture 3, a rotating polygon mirror 4, a deflector 5 for rotating the rotating polygon mirror 4, an f ⁇ lens 9 and the like.
- An opening 10 c provided at the upper portion of the optical box 10 is covered by a lid 26 shown in FIG.
- the fixing screws 11a to 11c are fixing means for fixing the control substrate 7 to the fixed bearing surfaces 13a to 13c provided on the outer surface of the side wall 10a of the optical box 10.
- the laser beam L is emitted from the semiconductor laser unit 1 according to an image signal received through the signal transmission connector 8 provided on the control substrate 7.
- the laser beam L is converted by the anamorphic lens 2 into parallel light or weakly convergent light in the main scanning direction (axial direction of the photosensitive drum 103). Further, it is converted into convergent light in the sub scanning direction (the circumferential direction of the photosensitive drum 103).
- the laser beam L is shaped into a predetermined shape by the aperture 3 formed of a through hole, and is connected in a focal line shape extending in the main scanning direction (axial direction of the photosensitive drum 103) on the reflecting surface 4a of the rotating polygon mirror 4.
- Image The laser beam L formed on the reflecting surface 4a of the rotary polygon mirror 4 is deflected by rotating the rotary polygon mirror 4 in the direction of arrow A in FIG.
- the laser beam L deflected by the rotary polygon mirror 4 is incident on the light receiving surface 61 of the BD sensor 6 mounted on the control substrate 7.
- the BD sensor 6 detects the writing position of the laser beam L in the main scanning direction, and outputs a BD (Beam Detect) signal according to the detected timing.
- the BD signal is a trigger signal of control for aligning the writing position in the main scanning direction.
- the laser beam L deflected and scanned by the rotary polygon mirror 4 enters the f ⁇ lens 9.
- the f ⁇ lens 9 is designed to condense the laser beam L so as to form a spot on the surface of the photosensitive drum 103 so that the scanning speed of the spot is kept constant.
- the f ⁇ lens 9 is formed of an aspheric lens.
- the laser beam L that has passed through the f ⁇ lens 9 is emitted from the opening 10 b of the optical box 10 and is imaged and scanned on the surface of the photosensitive drum 103.
- the control board 7 is fixed to the outer surface of the side wall 10 a of the optical box 10 using fixing screws 11 a, 11 b and 11 c.
- the opening 10c at the top of the optical box 10 is covered by a lid 26 shown in FIG.
- the rotary polygon mirror 4 deflects the laser beam L by rotating in the direction of arrow A in FIG. 2, and the laser beam L is deflected in the main scanning direction on the surface of the photosensitive drum 103 uniformly charged by the charging roller 15.
- the surface of the photosensitive drum 103 is exposed by scanning in the axial direction of the drum 103). Further, exposure in the sub scanning direction (the circumferential direction of the photosensitive drum 103) is performed by rotationally driving the photosensitive drum 103 in the clockwise direction in FIG. Thereby, an electrostatic latent image corresponding to the image information is formed on the surface of the photosensitive drum 103.
- FIG. 3 is an explanatory side view showing the positional relationship between the control board 7, the BD sensor 6 and the fixing screws 11a to 11c in the present embodiment.
- FIG. 4 is an exploded perspective view showing the positional relationship among the control board 7, the optical box 10, and the fixing screws 11a to 11c in the present embodiment.
- the control substrate 7 shown in FIGS. 3 and 4 is formed of a single-sided substrate made of paper phenolic resin.
- the paper phenolic resin substrate is formed by impregnating a paper with an insulating material with a phenolic resin, and is also called a bakelite substrate.
- the control substrate 7 of a single-sided substrate is used, but the control substrate 7 of a double-sided substrate may be used.
- control board 7 As a material of the control board 7, it is also possible to adopt glass epoxy resin. In the present embodiment, cost reduction can be achieved by employing paper phenol resin as the material of the control substrate 7. Although the control substrate 7 made of paper phenolic resin is cheaper than the control substrate 7 made of glass epoxy, its mechanical strength is low and warpage tends to occur.
- a laser driver (not shown) is mounted along with the BD sensor 6 on the mounting surface of the control board 7 on which the electronic component is mounted. These electronic components are soldered and fixed to the control substrate 7 by reflow soldering. The reflow soldering is to heat, melt and solder the solder which has been previously applied at normal temperature.
- the semiconductor laser unit 1 employs a two-beam laser emitted from each of two light emitting points. As shown in FIG. 4, the four terminals 1a, 1b, 1c, 1d of the semiconductor laser unit 1 are inserted through the through holes 7a, 7b, 7c, 7d provided in the control substrate 7, and the control substrate 7 shown in FIG. Are electrically connected by solder at four points of the electric circuit provided in the connection region 12 of FIG. In FIG. 3, the connection region 12 indicated by a broken line corresponds to a circle obtained by projecting the outer diameter of the cylindrical exterior of the semiconductor laser unit 1 (light source) shown in FIG.
- the control board 7 is provided with through holes 14a, 14b, provided in the control board 7 with respect to the fixed bearing surfaces 13a, 13b, 13c provided on the outer surface of the side wall 10a of the optical box 10. It is fixed at three points by fixing screws 11a to 11c inserted into 14c.
- the fixing screws 11a and 11c are provided in the vicinity of a straight line C passing through the center position 6a of the BD sensor 6 in parallel with the opening 10c surface of the optical box 10 shown in FIG. It is disposed on a straight line M passing through the center position 6 a of the BD sensor 6.
- the straight line C shown in FIG. 3 is also a straight line connecting the center position 6 a of the BD sensor 6 and the center position 12 a of the connection region 12 of the semiconductor laser unit 1.
- the fixing screw 11b which is at least one of the three fixing screws 11a to 11c (fixing means) is disposed at the following position.
- FIG. 4 shows fixed bearing surfaces 13a to 13c for fixing the control substrate 7 to the outer surface of the side wall 10a of the optical box 10.
- fixed bearing surfaces 13a to 13c are provided on the outer surface of the side wall 10a of the optical box 10.
- the surfaces on which the fixed bearing surfaces 13a to 13c abut the back surface of the control board 7 are flat.
- Female screw holes 13a1, 13b1 and 13c1 are formed at the centers of the fixed bearing surfaces 13a to 13c.
- the fixing screws 11a to 11c inserted into the through holes 14a to 14c of the control board 7 are male screw portions 11a1 to 11c1 formed on the shaft portions of the fixing screws 11a to 11c as female screw holes of the fixing bearing surfaces 13a to 13c. Screw on 13a1 to 13c1. As a result, the control board 7 is fixed on the fixing seat surfaces 13a to 13c by the fixing screws 11a to 11c.
- the laser beam L deflected and scanned by the rotary polygon mirror 4 passes through the through hole 10 a 1 penetrating the side wall 10 a of the optical box 10 and the through hole 7 e penetrating the control substrate 7. Then, the light receiving surface 61 is disposed in the through hole 7 e of the control substrate 7 and is incident on the light receiving surface 61 of the BD sensor 6 mounted on the control substrate 7.
- FIG. 5 is a cross-sectional view taken along the line BB in FIG. 3 showing the positional relationship between the light receiving surface 61 of the BD sensor 6 and the control substrate 7 in the present embodiment.
- the BD sensor 6 shown in FIG. 5 generates a BD (Beam Detect) signal when the laser light flux L is incident on the light receiving surface 61 of the BD sensor 6.
- a BD (Beam Detect) signal generated by the BD sensor 6 is transmitted to the control substrate 7 via the terminal 62.
- the light receiving surface 61 of the BD sensor 6 is disposed substantially the same as the back surface 7 f of the control substrate 7 facing the outer surface of the side wall 10 a of the optical box 10.
- the BD sensor 6 outputs a BD (Beam Detect) signal and is transmitted to the control substrate 7 through the terminal 62.
- the BD sensor 6 is shown schematically in FIGS. 6A to 6D because it is hidden by the control substrate 7.
- the optical box 10 is produced by injection molding of a resin.
- the fixed bearing surfaces 13a and 13c may have an inclination due to variations in manufacturing.
- the warpage of the control board 7 is classified into four types as shown in FIGS. 6A to 6D according to the inclination states of the fixed bearing surfaces 13a and 13c shown in FIGS. 6A to 6D.
- the warpage of the control substrate 7 is convex to the outside at the place where the BD sensor 6 is provided. It will be in the state away from the outer surface of the side wall 10a. Further, in the inclined state of the fixed bearing surfaces 13a and 13c shown in FIG. 6B and FIG. 6D, the warpage of the control substrate 7 is convex inward at the location where the BD sensor 6 is provided. The outer surface of the side wall 10a of 10 is approached.
- the optical path length of the laser light flux L incident on the light receiving surface 61 of the BD sensor 6 is longer than the normal optical path length. Further, in the case of FIG. 6B and FIG. 6D, the optical path length of the laser light flux L incident on the light receiving surface 61 of the BD sensor 6 is shorter than the normal optical path length.
- FIG. 7A is a cross-sectional view taken along the line BB in FIG. 3 showing the positional relationship between the light receiving surface 61 of the BD sensor 6 and the laser light flux L incident on the light receiving surface 61.
- the laser beam L is incident on the light receiving surface 61 of the BD sensor 6 at an incident angle ⁇ with respect to the normal direction (vertical direction) of the light receiving surface 61 at an angle larger than 0 °. It is set.
- the reason for setting such an incident angle ⁇ is that, when the normal direction of the light receiving surface 61 of the BD sensor 6 matches the incident direction of the laser beam L, part of the laser beam L on the surface of the BD sensor 6 It is reflected. The reflected light returns to the semiconductor laser unit 1 which is a light source, and return light noise is generated. The return light noise makes the laser oscillation unstable. This is to prevent this.
- FIGS. 6A to 6D when the position of the light receiving surface 61 of the BD sensor 6 deviates from the normal position due to the inclination of the fixed bearing surfaces 13a and 13c and the warp of the control substrate 7, FIG. This will be described using FIG. 7C.
- FIGS. 7B and 7C show the case where the position of the light receiving surface 61 of the BD sensor 6 is moved from the normal position due to the inclination of the fixed bearing surfaces 13a and 13c and the warpage of the control substrate 7 It is a figure which shows positional relationship.
- FIG. 7B shows a case where the position of the light receiving surface 61 of the BD sensor 6 deviates from the normal position on the extension of the laser beam L in the optical axis direction.
- the timing at which the laser beam L enters the light receiving surface 61 of the BD sensor 6 does not change. For this reason, there is no shift in the writing position.
- FIG. 7C shows a case where the position of the light receiving surface 61 of the BD sensor 6 deviates from the normal position to a position deviated from the optical axis direction of the laser beam L.
- the timing at which the laser beam L is incident on the light receiving surface 61 of the BD sensor 6 is not the laser beam L at the regular position but the laser deviated from the optical axis direction of the laser beam L by an angle ⁇ 2.
- the luminous flux L 2 is incident on the light receiving surface 61 of the BD sensor 6.
- the detection timing of the laser beam L2 incident on the light receiving surface 61 of the BD sensor 6 is advanced by the angle ⁇ 2. As a result, a shift in the writing position occurs.
- the writing position on the image shifts.
- the margin on the image printed on the recording material P is shifted.
- FIG. 7C when the laser beam L at the regular position deviates from the optical axis direction of the laser beam L to the upstream side in the scanning direction of the laser beam L by the angle ⁇ 2, the image writing timing is advanced, and printing on the recording material P is performed. The margin on the image is smaller on the writing side.
- FIG. 8A and 8B show the BD sensor 6 and the optical box when the control substrate 7 in the warped state shown in FIG. 6A is further fixed to the fixed seat 13b provided on the outer surface of the side wall 10a of the optical box 10.
- 10 is a cross-sectional explanatory view showing a positional relationship with 10;
- FIG. 8A shows the case where the fixed bearing surface 13b is not inclined.
- FIG. 8B shows the case where the fixed seating surface 13b is inclined.
- the fixed bearing surface 13b and the BD sensor 6 are disposed on the same plane (on the straight line M in FIG. 3) orthogonal to the scanning direction of the laser beam L (in the direction of arrow A in FIG. 2).
- the control substrate 7 is further fixed by the fixed bearing surface 13b.
- the position of the BD sensor 6 is fixed at the position on the straight line M in FIG. 3 where the fixed seating surface 13b is disposed without being affected by the warpage of the control substrate 7 even if the control board 7 is warped.
- the light receiving surface 61 of the BD sensor 6 is disposed substantially flush with the back surface 7f of the control substrate 7.
- the position at which the laser beam L is received on the light receiving surface 61 hardly changes.
- the displacement of the position of the BD sensor 6 which generates the horizontal synchronization signal due to the influence of the warpage of the control substrate 7 is suppressed, and the timing of generating the horizontal synchronization signal for controlling the image writing position is prevented from being displaced.
- FIG. 9 is a perspective view showing the positional relationship among the semiconductor laser unit 1 in the second embodiment, the connection area 20 for fixing the semiconductor laser unit 1 on the control substrate 21, the signal transmission connector 23, and the fixing screw 22.
- FIG. 9 is a perspective view showing the positional relationship among the semiconductor laser unit 1 in the second embodiment, the connection area 20 for fixing the semiconductor laser unit 1 on the control substrate 21, the signal transmission connector 23, and the fixing screw 22.
- the control board 7 is fixed to the outer surface of the side wall 10a of the optical box 10 by three fixing screws 11a to 11c.
- the signal transmission connector 8 is an example in which the longitudinal direction is provided laterally below the fixing screw 11 c.
- the control substrate 7 is fixed to the outer surface of the side wall 10 a of the optical box 10 by one fixing screw 22.
- the signal transmission connector 23 is an example provided on the left side of the fixing screw 22 and in the longitudinal direction in the longitudinal direction. The positional relationship between the signal transmission connector 23, the BD (Beam Detect) sensor 24 and the fixing screw 22 of the second embodiment will be described with reference to FIG.
- connection region 20 constitutes a first connection portion in which the semiconductor laser unit 1 (light source) is connected to the control substrate 21.
- control board 7 is fixed to the fixing seat surfaces 13a to 13c provided on the outer surface of the side wall 10a of the optical box 10 using the three fixing screws 11a to 11c.
- control board 21 is fixed to a not-shown fixing seat provided on the outer surface of the side wall 10a of the optical box 10 using one fixing screw 22 for cost reduction.
- the fixing screw 22 of the second embodiment is disposed at a position corresponding to the fixing screw 11b of the first embodiment shown in FIG.
- one fixing screw 22 (fixing means) is disposed at the following position.
- a straight line M which is orthogonal to a straight line C (first straight line) connecting the semiconductor laser unit 1 (light source) and the BD sensor 24 (detection means) and passes through the BD sensor 24 (detection means) fixed to the control substrate 21 It is arranged at the top (on the second straight line).
- the signal transmission connector 23 shown in FIG. 9 constitutes a second connection portion in which the control board 21 is electrically connected to the outside.
- the signal transmission connector 23 (second connection portion) is closer to the BD sensor 24 side than the straight line E (fourth straight line) orthogonal to the straight line C (first straight line) and passing through the semiconductor laser unit 1 (light source) Is disposed on the detection means side).
- the signal transmission connector 23 is electrically connected to the outside using a bundle (not shown). When the bundle of wires detachably connected to the signal transmission connector 23 is inserted and removed, a force is applied to the control substrate 21 and the control substrate 21 is deformed.
- the four terminals 1a to 1d of the semiconductor laser unit 1 are inserted into the through holes 21a to 21d provided in the control substrate 21 as shown in FIG. 4 and described above. Then, solder is electrically conducted and connected at four places of the electric circuit provided in the connection area 20 of the control substrate 21 shown in FIG.
- control substrate 21 and the semiconductor laser unit 1 are fixed by solder, and when the control substrate 21 is deformed, the force is applied to the solder of the connection region 20 as well.
- peeling may occur on the connection surface of the control substrate 21 with the electric circuit.
- the fixing screw 22 (fixed) is provided between the connection region 20 (first connection portion) and the signal transmission connector 23 (second connection portion) in order to reduce the influence of the force of the connection region 20 on the solder. Means).
- the deformation of the control substrate 21 due to the insertion and removal of the bundle of signal transmission connectors 23 does not easily spread to the solder of the connection area 20 of the semiconductor laser unit 1.
- the laser beam L deflected and scanned by the rotary polygon mirror 4 passes through the through hole 10a1 passing through the side wall 10a of the optical box 10 and the through hole 21e passing through the control substrate 21. Then, the light receiving surface 61 is disposed in the through hole 21 e of the control substrate 21 and the light receiving surface 61 of the BD sensor 24 mounted on the control substrate 21 is incident.
- the horizontal synchronization signal for controlling the image writing position can be suppressed with a configuration cheaper than the first embodiment, suppressing the displacement of the position of the BD sensor 24 due to the influence of the warpage of the control substrate 21. It can suppress that the timing which generate
- FIG. 10 is a perspective explanatory view showing another configuration of the second embodiment.
- the control substrate 21 is fixed to the side wall 10a of the optical box 10 by a fixing screw 22 as one fixing means.
- the fixing screw 22 is disposed on a straight line M (second straight line) orthogonal to a straight line C (first straight line) connecting the semiconductor laser unit 1 (light source) and the BD sensor 24 (detection means).
- a straight line D (third straight line) parallel to the straight line M (second straight line) passing through the end 20 a of the semiconductor laser unit 1 (light source) on the BD sensor 24 side (detecting means side) is considered.
- the fixing screw 22 (fixing means) is disposed closer to the BD sensor 24 (detecting means) than the straight line D.
- the fixing screw 22 (fixing means) is disposed between the signal transmission connector 23 and the BD sensor 24 (detection means) to which the control substrate 21 is electrically connected to the outside.
- the fixing screw 22 (fixing means) is disposed closer to the BD sensor 24 than the signal transmission connector 23.
- the fixing screw 22 (fixing means) is provided at a position farther from the BD sensor 24 (detecting means) than the semiconductor laser unit 1 (light source), but the position is as shown in FIG. It is not limited.
- a straight line M (second straight line) orthogonal to a straight line C (first straight line) connecting the semiconductor laser unit 1 (light source) and the BD sensor 24 (detection means)
- a straight line G (fifth straight line) passing parallel to the straight line M and passing through the end 24 b of the BD sensor 24 (detection means) farthest from the semiconductor laser unit 1 (light source)
- the fixing screw 22 (fixing means) may be disposed on the straight line G.
- the connection area 20 indicated by a broken line corresponds to a circle obtained by projecting the outer diameter of the cylindrical exterior of the semiconductor laser unit 1 (light source) onto the control substrate 21.
- the other configuration is the same as that of the first embodiment, and the same effect can be obtained.
- FIG. 12 is a perspective view showing another configuration of the third embodiment.
- the control substrate 21 is fixed to the side wall 10 a of the optical box 10 by a fixing screw 22 as one fixing means.
- the fixing screw 22 is disposed on a straight line M (second straight line) orthogonal to a straight line C (first straight line) connecting the semiconductor laser unit 1 (light source) and the BD sensor 24 (detection means). .
- the fixing screw 22 (fixing means) is disposed closer to the BD sensor 24 (detecting means) than the semiconductor laser unit 1 (light source).
- the connection region 20 indicated by a broken line corresponds to a circle obtained by projecting the outer diameter of the cylindrical exterior of the semiconductor laser unit 1 (light source) onto the control substrate 21.
- the other configuration is the same as that of the first and second embodiments, and the same effect can be obtained.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Facsimile Scanning Arrangements (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Laser Beam Printer (AREA)
Abstract
本発明は、水平同期信号を発生させる検知手段を確実かつ高精度に光学箱に位置決めし、画像書き出し位置が安定した画像を形成することが可能な光学走査装置を提供する。本発明の光学走査装置は、レーザ光束の書き出し位置を検知するBDセンサ(6)が、半導体レーザユニット(1)と電気的に接続された制御基板(7)に固定され、該制御基板(7)が、回転多面鏡を備えた偏向器を収容する光学箱に固定ビス(11a~11c)により固定され、そのうちの固定ビス(11b)が、半導体レーザユニット(1)とBDセンサ(6)とを結ぶ第1の直線(C)に対して直交すると共に半導体レーザユニット(1)上を通る直線よりもBDセンサ(6)側に配置されていることを特徴とする。
Description
本発明は、複写機、プリンタ、ファクシミリ装置等の画像形成装置に用いられる光学走査装置に関する。
複写機、プリンタ、ファクシミリ装置等の画像形成装置に用いられる光学走査装置は、画像信号に応じて光源から出射したレーザ光束を光変調し、光変調されたレーザ光束を例えば回転多面鏡からなる光偏向器で偏向走査している。偏向走査されたレーザ光束は、fθレンズ等の走査レンズにより感光ドラムの表面上に結像させて静電潜像を形成する。次いで、感光ドラムの表面上に形成した静電潜像に現像装置により現像剤を供給してトナー像として現像して顕像化し、これを紙等の記録材に転写して定着装置へ送り、記録材上のトナー像を加熱定着させることで印刷が行われる。
光学走査装置には、光源から出射したレーザ光束を回転多面鏡からなる光偏向器で偏向走査を行う。その際に回転多面鏡の反射面により反射されたレーザ光束の画像の書き出し位置を制御する。そのためにレーザ光束を受光して水平同期信号を発生させるBD(Beam Detect)センサを搭載した制御基板が備えられている。この制御基板は、光源と接続されている。特許文献1、2では、制御基板が光学走査装置の光学箱の外壁にビスにより固定されている。
しかしながら、上記特許文献1、2では、以下のような課題があった。通常、制御基板上の電子部品は、リフロー半田(はんだ)付けされている。リフロー半田付けとは、予め常温で付けておいた半田を、後で加熱して溶かして半田付けすることである。そのリフロー半田付けの際の熱により制御基板に反りが発生する場合がある。また、制御基板を光学箱に固定する際に固定座面の座面精度によっては制御基板に反りが発生する場合もある。
BDセンサを搭載した制御基板は、光学箱にビスで固定されている。その固定点は、BDセンサから離れた位置にあり制御基板の反りの影響によりBDセンサの位置が反り方向にずれてしまう。反り方向にBDセンサの位置がずれると、画像書き出し位置を制御するための水平同期信号を発生させるタイミングが反りの影響を受けてずれる場合がある。
本発明は前記課題を解決するものであり、その目的とするところは、水平同期信号を発生させる検知手段を確実かつ高精度に光学箱に位置決めし、画像書き出し位置が安定した画像を形成することが可能な光学走査装置を提供するものである。
前記目的を達成するための本発明に係る光学走査装置の代表的な構成は、光源と、前記光源から出射された光束を偏向走査するための回転多面鏡を備えた偏向器と、前記回転多面鏡により反射された光束の書き出し位置を検知する検知手段と、前記光源と電気的に接続された制御基板と、前記偏向器を収容する光学箱と、を有する光学走査装置において、前記検知手段は、前記制御基板に固定され、前記制御基板は、前記光学箱に固定手段により固定され、前記固定手段のうちの少なくとも1つは、前記光源と前記検知手段とを結ぶ第1の直線に対して直交すると共に前記制御基板に固定された前記検知手段を通る第2の直線上に配置されていることを特徴とする。
本発明によれば、水平同期信号を発生させる検知手段を確実かつ高精度に光学箱に位置決めし、画像書き出し位置が安定した画像を形成することができる。
図により本発明に係る光学走査装置を備えた画像形成装置の一実施形態を具体的に説明する。
[第1実施形態]
図1~図8Bを用いて本発明に係る光学走査装置を備えた画像形成装置の第1実施形態の構成について説明する。
図1~図8Bを用いて本発明に係る光学走査装置を備えた画像形成装置の第1実施形態の構成について説明する。
<画像形成装置>
先ず、図1を用いて本発明に係る光学走査装置を備えた画像形成装置の構成について説明する。図1は、本発明に係る光学走査装置101を備えた画像形成装置の構成を示す断面説明図である。図1に示す画像形成装置110は、電子写真方式のレーザプリンタの一例を示す。図1に示す画像形成装置110は、光学走査装置101を備えている。画像形成装置110は、光学走査装置101により像担持体となる感光ドラム103の表面上に露光走査された画像に基づいて記録材Pに画像を形成する画像形成手段を備える。感光ドラム103の表面上には、光学走査装置101から出射されたレーザ光束L(光束)が走査露光されて静電潜像が形成される。
先ず、図1を用いて本発明に係る光学走査装置を備えた画像形成装置の構成について説明する。図1は、本発明に係る光学走査装置101を備えた画像形成装置の構成を示す断面説明図である。図1に示す画像形成装置110は、電子写真方式のレーザプリンタの一例を示す。図1に示す画像形成装置110は、光学走査装置101を備えている。画像形成装置110は、光学走査装置101により像担持体となる感光ドラム103の表面上に露光走査された画像に基づいて記録材Pに画像を形成する画像形成手段を備える。感光ドラム103の表面上には、光学走査装置101から出射されたレーザ光束L(光束)が走査露光されて静電潜像が形成される。
図1に示す画像形成装置110は、得られた画像情報に基づいたレーザ光束Lを露光手段となる光学走査装置101により出射し、プロセスカートリッジ102に内蔵された像担持体としての感光ドラム103の表面上に照射する。プロセスカートリッジ102は、感光ドラム103と、該感光ドラム103に作用する画像形成プロセス手段として帯電手段となる帯電ローラ15、現像手段となる現像装置16、クリーニング手段となるクリーナ25等が一体的に設けられている。プロセスカートリッジ102は、画像形成装置110本体に対して着脱可能に設けられる。
図1の時計回り方向に回転する像担持体となる感光ドラム103の表面は、帯電手段となる帯電ローラ15により一様に帯電される。一様に帯電された感光ドラム103の表面に対して光学走査装置101により画像情報に応じたレーザ光束Lを露光走査する。これにより感光ドラム103の表面上に画像情報に応じた静電潜像が形成される。感光ドラム103の表面上に形成された静電潜像に対して現像手段となる現像装置16に設けられた現像剤担持体となる現像ローラ16aにより現像剤を供給してトナー像として現像する。
一方、給送カセット104内に収容された記録材Pは、給送ローラ105により繰り出され、分離ローラ17との協働により一枚ずつ分離給送される。更に、搬送ローラ106により挟持搬送されて停止したレジストローラ18のニップ部に先端部が付き当てられる。記録材Pの腰の強さにより扱かれて記録材Pの斜行が補正される。
感光ドラム103の表面と転写手段となる転写ローラ107とにより形成される転写ニップ部Nに該感光ドラム103の表面上に形成されたトナー像が到達するタイミングに同期してレジストローラ18が回転する。これにより記録材Pはレジストローラ18により挟持されて転写ニップ部Nに搬送される。図示しない転写バイアス電源により転写ローラ107に転写バイアスが印加されて感光ドラム103の表面上に形成されたトナー像が記録材Pに転写される。転写後に感光ドラム103の表面上に残留した残トナーは、クリーナ25により除去されて回収される。
未定着のトナー像が形成された記録材Pは、感光ドラム103と転写ローラ107とにより挟持されて定着手段となる定着装置108に搬送される。定着装置108に設けられた定着ローラと加圧ローラとにより挟持搬送される過程において加熱及び加圧されてトナー像が熱溶融し、記録材Pに熱定着される。定着装置108の定着ローラと加圧ローラとにより挟持搬送された記録材Pは、排出ローラ109により機外に設けられた排出トレイ19上に排出される。
本実施形態では、感光ドラム103に作用する画像形成プロセス手段としての帯電手段となる帯電ローラ15及び現像手段となる現像装置16をプロセスカートリッジ102の内部に感光ドラム103と一体的に設けた。他に、各画像形成プロセス手段を感光ドラム103とは別体で構成することも出来る。
<光学走査装置>
次に、図2を用いて光学走査装置101の構成について説明する。図2は、本発明に係る光学走査装置101の構成を示す斜視説明図である。図2において、半導体レーザユニット1は、レーザ光束Lを出射する光源である。アナモコリメータレンズ2は、コリメータレンズとシリンドリカルレンズとを一体的に形成したものである。アパーチャ(aperture)3は、レーザ光束Lを所定の形状に整形する光学絞りである。偏向器5は、回転多面鏡4を回転駆動させる。偏向器5は、半導体レーザユニット1(光源)から出射されたレーザ光束L(光束)を偏向させるための回転多面鏡4を備える。
次に、図2を用いて光学走査装置101の構成について説明する。図2は、本発明に係る光学走査装置101の構成を示す斜視説明図である。図2において、半導体レーザユニット1は、レーザ光束Lを出射する光源である。アナモコリメータレンズ2は、コリメータレンズとシリンドリカルレンズとを一体的に形成したものである。アパーチャ(aperture)3は、レーザ光束Lを所定の形状に整形する光学絞りである。偏向器5は、回転多面鏡4を回転駆動させる。偏向器5は、半導体レーザユニット1(光源)から出射されたレーザ光束L(光束)を偏向させるための回転多面鏡4を備える。
BD(Beam Detect)センサ6は、回転多面鏡4により反射されたレーザ光束L(光束)の書き出し位置を検知する検知手段である。制御基板7は、半導体レーザユニット1(光源)と電気的に接続されている。信号伝達コネクタ8は、制御基板7に設けられている。fθレンズ9は、走査レンズである。尚、fθレンズ9は、レーザ光束Lが角度θで入ってくると、該fθレンズ9の焦点距離fを掛け合わせた大きさ(f×θ)の像を結ぶようなレンズ特性(fθ特性)を有する。
光学箱10は、半導体レーザユニット1(光源)、アナモコリメータレンズ2、アパーチャ3、回転多面鏡4、該回転多面鏡4を回転駆動させる偏向器5、fθレンズ9等を収容する。光学箱10の上部に設けられた開口10cは、図1に示す蓋体26により覆われる。固定ビス11a~11cは、光学箱10の側壁10aの外表面に設けられた固定座面13a~13cに制御基板7を固定する固定手段である。
図2に示す光学走査装置101は、制御基板7に設けられた信号伝達コネクタ8を通じて受信した画像信号に応じて半導体レーザユニット1からレーザ光束Lが出射される。レーザ光束Lは、アナモコリメータレンズ2により主走査方向(感光ドラム103の軸方向)では平行光または弱収束光に変換される。また、副走査方向(感光ドラム103の周方向)では収束光に変換される。
その後、レーザ光束Lは、貫通穴からなるアパーチャ3により所定の形状に整形され、回転多面鏡4の反射面4a上において主走査方向(感光ドラム103の軸方向)に長く伸びる焦線状に結像する。回転多面鏡4の反射面4a上に結像したレーザ光束Lは、該回転多面鏡4を図2の矢印A方向に回転させることにより偏向される。
回転多面鏡4により偏向されたレーザ光束Lは、制御基板7に実装されたBDセンサ6の受光面61に入射する。このとき、BDセンサ6は、主走査方向におけるレーザ光束Lの書き出し位置を検知すると共に、検知したタイミングに応じたBD(Beam Detect)信号を出力する。BD信号は、主走査方向における書出し位置を揃える制御のトリガ信号となる。
回転多面鏡4が図2の矢印A方向に更に回転すると、回転多面鏡4により偏向走査されたレーザ光束Lは、fθレンズ9に入射する。fθレンズ9は、レーザ光束Lを感光ドラム103の表面上にスポットを形成するように集光し、該スポットの走査速度が等速度に保たれるように設計されている。このようなfθレンズ9の特性を得るためにfθレンズ9は非球面レンズで形成されている。
fθレンズ9を通過したレーザ光束Lは、光学箱10の開口10bから出射されて感光ドラム103の表面上に結像走査される。制御基板7は、光学箱10の側壁10aの外表面に対して固定ビス11a、11b、11cを用いて固定されている。尚、光学箱10の上部の開口10cは、図1に示す蓋体26により覆われている。
回転多面鏡4は、図2の矢印A方向に回転することによりレーザ光束Lを偏向し、帯電ローラ15により一様に帯電された感光ドラム103の表面上でレーザ光束Lを主走査方向(感光ドラム103の軸方向)に走査し、感光ドラム103の表面を露光する。また、感光ドラム103が図1の時計回り方向に回転駆動されることにより副走査方向(感光ドラム103の周方向)の露光が行われる。これにより感光ドラム103の表面に画像情報に応じた静電潜像が形成される。
<制御基板とBDセンサと固定ビスとの位置関係>
次に、図3及び図4を用いて本実施形態における制御基板7とBDセンサ6と固定ビス11a~11cとの位置関係について説明する。図3は、本実施形態における制御基板7とBDセンサ6と固定ビス11a~11cとの位置関係を示す側面説明図である。図4は、本実施形態における制御基板7と光学箱10と固定ビス11a~11cとの位置関係を示す分解斜視図である。図3及び図4に示す制御基板7は、紙フェノール樹脂製の片面基板で構成される。紙フェノール樹脂製の基板は、絶縁体の紙にフェノール樹脂を浸透させて形成したもので、ベークライト基板とも呼ばれている。尚、本実施形態では、片面基板の制御基板7を採用しているが、両面基板の制御基板7であっても良い。
次に、図3及び図4を用いて本実施形態における制御基板7とBDセンサ6と固定ビス11a~11cとの位置関係について説明する。図3は、本実施形態における制御基板7とBDセンサ6と固定ビス11a~11cとの位置関係を示す側面説明図である。図4は、本実施形態における制御基板7と光学箱10と固定ビス11a~11cとの位置関係を示す分解斜視図である。図3及び図4に示す制御基板7は、紙フェノール樹脂製の片面基板で構成される。紙フェノール樹脂製の基板は、絶縁体の紙にフェノール樹脂を浸透させて形成したもので、ベークライト基板とも呼ばれている。尚、本実施形態では、片面基板の制御基板7を採用しているが、両面基板の制御基板7であっても良い。
制御基板7の材質としては、ガラスエポキシ樹脂を採用することも可能である。本実施形態では、制御基板7の材質として紙フェノール樹脂を採用することで低コスト化できる。紙フェノール樹脂製の制御基板7は、ガラスエポキシ製の制御基板7よりもコストが安いが機械的強度が低く、反りが発生し易い。制御基板7の電子部品の実装面には、レーザドライバ(不図示)がBDセンサ6とともに実装されている。これらの電子部品は、リフロー半田付けにより制御基板7に半田付けされて固定されている。リフロー半田付けとは、予め常温で付けておいた半田を、後で加熱して溶かして半田付けすることである。
半導体レーザユニット1は、2つの発光点からそれぞれ出射される2ビームレーザを採用している。図4に示すように、半導体レーザユニット1の4つの端子1a、1b、1c、1dが制御基板7に設けられた貫通孔7a、7b、7c、7dに挿通され、図3に示す制御基板7の接続領域12に設けられた電気回路の4箇所でそれぞれ半田により電気的に導通して接続されている。尚、図3において、破線で示す接続領域12は、図4に示す半導体レーザユニット1(光源)の円筒状の外装の外径を投影した円に相当している。
図4に示すように、制御基板7は、光学箱10の側壁10aの外表面に設けられた固定座面13a、13b、13cに対して該制御基板7に設けられた貫通孔14a、14b、14cに挿通される固定ビス11a~11cにより3箇所で固定している。固定ビス11a,11cは、図3に示す光学箱10の開口10c面と平行でBDセンサ6の中心位置6aを通る直線C上の近傍に設けられ、固定ビス11bは、直線Cと直交し、BDセンサ6の中心位置6aを通る直線M上に配置されている。図3に示す直線Cは、BDセンサ6の中心位置6aと、半導体レーザユニット1の接続領域12の中心位置12aとを結ぶ直線でもある。
本実施形態では、3つの固定ビス11a~11c(固定手段)のうちの少なくとも1つとなる固定ビス11bは以下の位置に配置される。半導体レーザユニット1(光源)とBDセンサ6(検知手段)とを結ぶ直線C(第1の直線)に対して直交すると共に制御基板7に固定されたBDセンサ6(検知手段)を通る直線M上(第2の直線上)に配置されている。
図4は、制御基板7を光学箱10の側壁10aの外表面に固定する固定座面13a~13cを示す。光学箱10の側壁10aの外表面には、一部を突出させた固定座面13a~13cが設けられる。固定座面13a~13cが制御基板7の裏面と当接する表面は平面で構成される。固定座面13a~13cの中心には雌ネジ穴13a1、13b1、13c1が形成されている。
制御基板7の貫通孔14a~14cに挿通された固定ビス11a~11cは、該固定ビス11a~11cの軸部に形成された雄ネジ部11a1~11c1を固定座面13a~13cの雌ネジ穴13a1~13c1に螺合締結する。これにより固定ビス11a~11cにより制御基板7が固定座面13a~13c上に固定される。
回転多面鏡4により偏向走査されたレーザ光束Lは、光学箱10の側壁10aを貫通する貫通穴10a1と、制御基板7を貫通する貫通穴7eとを透過する。そして、制御基板7の貫通穴7e内に受光面61を配置して制御基板7に実装されたBDセンサ6の受光面61に入射する。
図5は、本実施形態におけるBDセンサ6の受光面61と制御基板7との位置関係を示す図3のB-B断面図である。図5に示すBDセンサ6は、該BDセンサ6の受光面61にレーザ光束Lが入射した際にBD(Beam Detect)信号を発生する。BDセンサ6で発生したBD(Beam Detect)信号は、端子62を介して制御基板7に伝達される。BDセンサ6の受光面61は、光学箱10の側壁10aの外表面に対向する制御基板7の裏面7fと略同一に配置されている。BDセンサ6の受光面61の中央にレーザ光束Lが入射されたときにBDセンサ6は、BD(Beam Detect)信号を出力し、端子62を通じて制御基板7に伝達される。
<比較例>
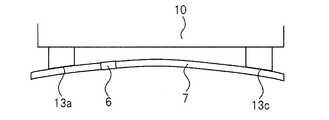
図6A、図6B、図6C及び図6Dは、比較例として光学箱10の側壁10aの外表面に設けられた固定座面13a,13cだけで制御基板7を固定した。そして、固定座面13bを使用しない。この状態で、固定座面13a,13cの傾きと制御基板7の反りによるBDセンサ6と光学箱10との位置関係を固定座面13a,13cの傾き毎に分類して示す断面説明図である。
図6A、図6B、図6C及び図6Dは、比較例として光学箱10の側壁10aの外表面に設けられた固定座面13a,13cだけで制御基板7を固定した。そして、固定座面13bを使用しない。この状態で、固定座面13a,13cの傾きと制御基板7の反りによるBDセンサ6と光学箱10との位置関係を固定座面13a,13cの傾き毎に分類して示す断面説明図である。
尚、BDセンサ6は制御基板7に隠れてしまうため図6A~図6Dでは模式的に示している。光学箱10は、樹脂を射出成型して作成される。このため製造時のばらつきにより固定座面13a,13cが傾きを持ってしまう場合がある。図6A~図6Dに示す固定座面13a,13cの傾き状態により制御基板7の反りは図6A~図6Dに示す4通りに分類される。
図6A及び図6Cに示す固定座面13a,13cの傾き状態では、制御基板7の反りはBDセンサ6が設けられた箇所が外側に凸形状に反っているためBDセンサ6は光学箱10の側壁10aの外表面から遠ざかった状態となる。また、図6B及び図6Dに示す固定座面13a,13cの傾き状態では、制御基板7の反りはBDセンサ6が設けられた箇所が内側に凸形状に反っているためBDセンサ6は光学箱10の側壁10aの外表面に近づいた状態となる。
つまり、図6A及び図6Cの場合は、BDセンサ6の受光面61に入射するレーザ光束Lの光路長は、正規の光路長よりも長くなる。また、図6B及び図6Dの場合は、BDセンサ6の受光面61に入射するレーザ光束Lの光路長は、正規の光路長よりも短くなる。
図7Aは、BDセンサ6の受光面61と、該受光面61に入射するレーザ光束Lとの位置関係を示す図3のB-B断面図である。図7Aに示すように、レーザ光束Lは、BDセンサ6の受光面61に対して該受光面61の法線方向(鉛直方向)に対する入射角度φが0°よりも大きな角度で入射するように設定されている。
このような入射角度φに設定する理由は、BDセンサ6の受光面61の法線方向と、レーザ光束Lの入射方向とが一致した場合はBDセンサ6の表面でレーザ光束Lの一部が反射される。その反射光が光源である半導体レーザユニット1にまで戻り、戻り光ノイズが発生する。その戻り光ノイズによりレーザ発振が安定しなくなる。これを防止するためである。
ここで、図6A~図6Dに示すように、固定座面13a,13cの傾きと制御基板7の反りによりBDセンサ6の受光面61の位置が正規の位置からずれた場合について、図7B及び図7Cを用いて説明する。図7B及び図7Cは、固定座面13a,13cの傾きと制御基板7の反りによりBDセンサ6の受光面61の位置が正規の位置から移動した場合の該受光面61とレーザ光束Lとの位置関係を示す図である。
図7Bは、BDセンサ6の受光面61の位置が正規の位置からレーザ光束Lの光軸方向の延長線上にずれた場合を示す。図7Bに示す場合には、レーザ光束LがBDセンサ6の受光面61に入射するタイミングは変わらない。このため書き出し位置のずれは発生しない。
図7Cは、BDセンサ6の受光面61の位置が正規の位置からレーザ光束Lの光軸方向から外れた位置にずれた場合を示す。図7Cに示す場合には、レーザ光束LがBDセンサ6の受光面61に入射するタイミングは、正規の位置のレーザ光束Lではなく、該レーザ光束Lの光軸方向から角度θ2だけずれたレーザ光束L2がBDセンサ6の受光面61に入射する。
そのためBDセンサ6の受光面61に入射したレーザ光束L2の検知タイミングが角度θ2分だけ早くなる。その結果として書き出し位置のずれが発生する。書き出し位置のずれが発生すると、画像上での書き出し位置がずれる。これにより記録材P上に印刷した画像上の余白がずれてしまう。図7Cに示すように、正規の位置のレーザ光束Lの光軸方向からレーザ光束Lの走査方向上流側に角度θ2だけずれた場合は、画像の書き出しタイミングは早くなり、記録材P上に印刷した画像上の余白は書き出し側が小さくなる。
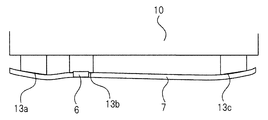
図8A及び図8Bは、図6Aに示す反りが発生した状態の制御基板7を光学箱10の側壁10aの外表面に設けられた固定座面13bに更に固定した際のBDセンサ6と光学箱10との位置関係を示す断面説明図である。図8Aは、固定座面13bが傾いていない場合を示す。図8Bは、固定座面13bが傾いている場合を示す。
固定座面13bと、BDセンサ6とは、レーザ光束Lの走査方向(図2の矢印A方向)に直交する同一平面上(図3の直線M上)に配置されている。これにより図6Aに示すように、固定座面13a,13cにより固定された制御基板7に反りが発生した状態で、更に、固定座面13bにより制御基板7を固定する。すると、BDセンサ6の位置は、制御基板7が反っていた場合でもその反りに影響されることなく固定座面13bが配置される図3の直線M上の位置に固定される。
また、図8Bに示すように、固定座面13bが傾いていた場合でも図5に示すように、BDセンサ6の受光面61は、制御基板7の裏面7fと略面一に配置されており、受光面61上のレーザ光束Lを受光する位置は、殆ど変化しない。これにより制御基板7の反りの影響により水平同期信号を発生するBDセンサ6の位置がずれることを抑制し、画像書き出し位置を制御するための水平同期信号を発生さるタイミングがずれることを防止することができる。これにより画像書き出し位置が安定した画像を形成することができる。
[第2実施形態]
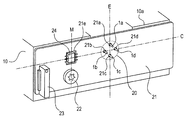
次に、図9を用いて本発明に係る光学走査装置を備えた画像形成装置の第2実施形態の構成について説明する。尚、第1実施形態と同様に構成したものは同一の符号、或いは符号が異なっても同一の部材名を付して説明を省略する。図9は、第2実施形態における半導体レーザユニット1と、制御基板21上の該半導体レーザユニット1を固定する接続領域20と、信号伝達コネクタ23と、固定ビス22との位置関係を示す斜視説明図である。
次に、図9を用いて本発明に係る光学走査装置を備えた画像形成装置の第2実施形態の構成について説明する。尚、第1実施形態と同様に構成したものは同一の符号、或いは符号が異なっても同一の部材名を付して説明を省略する。図9は、第2実施形態における半導体レーザユニット1と、制御基板21上の該半導体レーザユニット1を固定する接続領域20と、信号伝達コネクタ23と、固定ビス22との位置関係を示す斜視説明図である。
第1実施形態では、図2に示すように、3つの固定ビス11a~11cにより制御基板7を光学箱10の側壁10aの外表面に固定した。また、信号伝達コネクタ8は、固定ビス11cの下方で長手方向が横向き設けられた一例であった。第2実施形態では、図9に示すように、一つの固定ビス22により制御基板7を光学箱10の側壁10aの外表面に固定した。また、信号伝達コネクタ23は、固定ビス22よりも左側で長手方向が縦向きに設けられた一例である。図9を用いて第2実施形態の信号伝達コネクタ23とBD(Beam Detect)センサ24と固定ビス22との位置関係について説明する。
図9に示すように、光源である半導体レーザユニット1の4つの端子1a~1dが制御基板21に設けられた4つの貫通孔に挿通され、制御基板21の接続領域20に設けられた電気回路の4箇所でそれぞれ半田により電気的に導通して接続されている。接続領域20は、半導体レーザユニット1(光源)が制御基板21に接続される第一接続部を構成する。
図2に示す第1実施形態では、3本の固定ビス11a~11cを用いて制御基板7を光学箱10の側壁10aの外表面に設けられた固定座面13a~13cに固定した。図9に示す第2実施形態では、コストダウンのために1本の固定ビス22を用いて制御基板21を光学箱10の側壁10aの外表面に設けられた図示しない固定座面に固定した。
第2実施形態の固定ビス22は、図2に示す第1実施形態の固定ビス11bに相当する位置に配置されている。第2実施形態では、1つの固定ビス22(固定手段)が以下の位置に配置される。半導体レーザユニット1(光源)とBDセンサ24(検知手段)とを結ぶ直線C(第1の直線)に対して直交すると共に制御基板21に固定されたBDセンサ24(検知手段)を通る直線M上(第2の直線上)に配置されている。
図9に示す信号伝達コネクタ23は、制御基板21が外部との間で電気的に接続される第二接続部を構成する。信号伝達コネクタ23(第二接続部)は、直線C(第1の直線)に対して直交すると共に半導体レーザユニット1(光源)を通る直線E(第4の直線)よりもBDセンサ24側(検知手段側)に配置されている。信号伝達コネクタ23は、外部との間で図示しない束線を用いて電気的に接続されている。信号伝達コネクタ23に着脱可能に接続される束線を抜き差しする際に制御基板21に力が加わり制御基板21が変形する。
図4に示して前述したと同様に、半導体レーザユニット1の4つの端子1a~1dが制御基板21に設けられた貫通孔21a~21dに挿通される。そして、図9に示す制御基板21の接続領域20に設けられた電気回路の4箇所でそれぞれ半田により電気的に導通して接続されている。
これにより制御基板21と半導体レーザユニット1とは、半田により固定されており、制御基板21が変形すると接続領域20の半田にもその力が加わる。接続領域20の半田に力が加わると、制御基板21の電気回路との接続面で剥離を起こす場合がある。
第2実施形態では、接続領域20の半田への力の影響を低減するために接続領域20(第一接続部)と信号伝達コネクタ23(第二接続部)との間に固定ビス22(固定手段)を配置する。これにより信号伝達コネクタ23の束線の抜き差しによる制御基板21の変形が半導体レーザユニット1の接続領域20の半田に及び難くしている。
第2実施形態においても回転多面鏡4により偏向走査されたレーザ光束Lは、光学箱10の側壁10aを貫通する貫通穴10a1と、制御基板21を貫通する貫通穴21eとを透過する。そして、制御基板21の貫通穴21e内に受光面61を配置して制御基板21に実装されたBDセンサ24の受光面61に入射する。第2実施形態では、第1実施形態よりもより安価な構成で、制御基板21の反りの影響によりBDセンサ24の位置がずれることを抑制し、画像書き出し位置を制御するための水平同期信号を発生さるタイミングがずれることを抑制することができる。
図10は、第2実施形態の他の構成を示す斜視説明図である。図10に示すように、制御基板21は、光学箱10の側壁10aに一つの固定手段となる固定ビス22により固定される。固定ビス22は、半導体レーザユニット1(光源)と、BDセンサ24(検知手段)とを結ぶ直線C(第1の直線)に対して直交する直線M(第2の直線)上に配置される。ここで、半導体レーザユニット1(光源)のBDセンサ24側(検知手段側)の端部20aを通り直線M(第2の直線)と平行な直線D(第3の直線)を考慮する。固定ビス22(固定手段)は、直線DよりもBDセンサ24側(検知手段側)に配置されている。
また、固定ビス22(固定手段)は、制御基板21が外部との間で電気的に接続される信号伝達コネクタ23とBDセンサ24(検知手段)との間に配置されている。また、固定ビス22(固定手段)は、信号伝達コネクタ23よりもBDセンサ24側に配置されている。図10では、固定ビス22(固定手段)は、BDセンサ24(検知手段)に対して半導体レーザユニット1(光源)よりも離れた位置に設けられているが、その位置は図10の形態に限定されるものではない。
例えば、図11に示すように、半導体レーザユニット1(光源)と、BDセンサ24(検知手段)とを結ぶ直線C(第1の直線)に対して直交する直線M(第2の直線)を考慮する。そして、直線Mに平行で半導体レーザユニット1(光源)から一番遠いBDセンサ24(検知手段)の端部24bを通る直線G(第5の直線)を考慮する。そして、直線G上に固定ビス22(固定手段)が配置されていても良い。尚、図10及び図11において、破線で示す接続領域20は、半導体レーザユニット1(光源)の円筒状の外装の外径を制御基板21上に投影した円に相当している。他の構成は第1実施形態と同様に構成され、同様の効果を得ることが出来る。
[第3実施形態]
図12は、第3実施形態の他の構成を示す斜視説明図である。図12に示すように、制御基板21は、光学箱10の側壁10aに一つの固定手段となる固定ビス22により固定される。固定ビス22は、半導体レーザユニット1(光源)と、BDセンサ24(検知手段)とを結ぶ直線C(第1の直線)に対して直交する直線M(第2の直線)上に配置される。固定ビス22(固定手段)は、半導体レーザユニット1(光源)よりもBDセンサ24(検知手段側)に近い側に配置されている。
図12は、第3実施形態の他の構成を示す斜視説明図である。図12に示すように、制御基板21は、光学箱10の側壁10aに一つの固定手段となる固定ビス22により固定される。固定ビス22は、半導体レーザユニット1(光源)と、BDセンサ24(検知手段)とを結ぶ直線C(第1の直線)に対して直交する直線M(第2の直線)上に配置される。固定ビス22(固定手段)は、半導体レーザユニット1(光源)よりもBDセンサ24(検知手段側)に近い側に配置されている。
ここで、直線C(第1の直線)上において、半導体レーザユニット1(光源)のBDセンサ24側(検知手段側)の端部20aから直線Mまでの距離をK1とする。更に、直線C(第1の直線)上において、BDセンサ24(検知手段側)の半導体レーザユニット1側(光源側)の端部24aから直線Mまでの距離をK2とする。このとき、{K2<K1}である。尚、図12において、破線で示す接続領域20は、半導体レーザユニット1(光源)の円筒状の外装の外径を制御基板21上に投影した円に相当している。他の構成は第1及び第2実施形態と同様に構成され、同様の効果を得ることが出来る。
この出願は、2016年11月17日に出願された日本国特許出願番号2016-223899、および2017年11月6日に出願された日本国特許出願番号2017-213548の優先権を主張するものであり、それらの内容を引用してこの出願の一部とするものである。
C…直線(第1の直線)
L…レーザ光束(光束)
M…直線(第2の直線)
1…半導体レーザユニット(光源)
4…回転多面鏡
5…偏向器
6…BDセンサ(検知手段)
7…制御基板
10…光学箱
11a~11c…固定ビス(固定手段)
L…レーザ光束(光束)
M…直線(第2の直線)
1…半導体レーザユニット(光源)
4…回転多面鏡
5…偏向器
6…BDセンサ(検知手段)
7…制御基板
10…光学箱
11a~11c…固定ビス(固定手段)
Claims (10)
- 光源と、
前記光源から出射された光束を偏向走査するための回転多面鏡を備えた偏向器と、
前記回転多面鏡により反射された光束の書き出し位置を検知する検知手段と、
前記光源と電気的に接続された制御基板と、
前記偏向器を収容する光学箱と、
を有する光学走査装置において、
前記検知手段は、前記制御基板に固定され、
前記制御基板は、前記光学箱に固定手段により固定され、
前記固定手段は、前記光源と前記検知手段とを結ぶ第1の直線に対して直交する第2の直線上に配置され、かつ前記光源よりも前記検知手段側に近い側に配置されていることを特徴とする光学走査装置。 - 光源と、
前記光源から出射された光束を偏向走査するための回転多面鏡を備えた偏向器と、
前記回転多面鏡により反射された光束の書き出し位置を検知する検知手段と、
前記光源と電気的に接続された制御基板と、
前記偏向器を収容する光学箱と、
を有する光学走査装置において、
前記検知手段は、前記制御基板に固定され、
前記制御基板は、前記光学箱に固定手段により固定され、
前記固定手段のうちの少なくとも1つは、前記光源と前記検知手段とを結ぶ第1の直線に対して直交すると共に前記制御基板に固定された前記検知手段を通る第2の直線上に配置されていることを特徴とする光学走査装置。 - 光源と、
前記光源から出射された光束を偏向走査するための回転多面鏡を備えた偏向器と、
前記回転多面鏡により反射された光束の書き出し位置を検知する検知手段と、
前記光源と電気的に接続された制御基板と、
前記偏向器を収容する光学箱と、
を有する光学走査装置において、
前記検知手段は、前記制御基板に固定され、
前記制御基板は、前記光学箱に固定手段により固定され、
前記固定手段は、前記光源と前記検知手段とを結ぶ第1の直線に対して直交する第2の直線上に配置され、かつ前記検知手段側の前記光源の端部を通り前記第2の直線と平行な第3の直線よりも前記検知手段側に配置されていることを特徴とする光学走査装置。 - 前記制御基板は、
前記光源が前記制御基板に接続される第一接続部と
前記制御基板が外部との間で電気的に接続される第二接続部と、
を有し、
前記固定手段は、前記第一接続部と前記第二接続部との間に配置されていることを特徴とする請求項1~3のいずれか1項に記載の光学走査装置。 - 前記制御基板の材質は、紙フェノール樹脂であることを特徴とする請求項1~4のいずれか1項に記載の光学走査装置。
- 前記制御基板は、
前記光源が前記制御基板に接続される第一接続部と、
前記制御基板が外部との間で電気的に接続される第二接続部と、
を有し、
前記第二接続部は、前記光源と前記検知手段とを結ぶ第1の直線に対して直交すると共に前記光源を通る第4の直線よりも前記検知手段側に配置されていることを特徴とする請求項1~5のいずれか1項に記載の光学走査装置。 - 前記固定手段は、1つの固定ビスであることを特徴とする請求項1から6のいずれか1項に記載の光学走査装置。
- 前記固定手段は、前記制御基板が外部との間で電気的に接続される信号伝達コネクタと前記検知手段との間に配置されていることを特徴とする請求項1から7のいずれか1項に記載の光学走査装置。
- 前記固定手段は、前記第2の直線と平行で前記検知手段の前記光源から一番遠い端部を通る第5の直線上に配置されていることを特徴とする請求項1から8のいずれか1項に記載の光学走査装置。
- 請求項1~9のいずれか1項に記載の光学走査装置と、
前記光束で走査させる感光ドラムと、
を備え、
記録材に画像を形成することを特徴とする画像形成装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201780070279.2A CN109964164B (zh) | 2016-11-17 | 2017-11-16 | 光学扫描装置和图像形成装置 |
| US16/411,578 US10698335B2 (en) | 2016-11-17 | 2019-05-14 | Optical scanning apparatus and image forming apparatus |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016223899 | 2016-11-17 | ||
| JP2016-223899 | 2016-11-17 | ||
| JP2017213548A JP6526150B2 (ja) | 2016-11-17 | 2017-11-06 | 光学走査装置及び画像形成装置 |
| JP2017-213548 | 2017-11-06 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US16/411,578 Continuation US10698335B2 (en) | 2016-11-17 | 2019-05-14 | Optical scanning apparatus and image forming apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018092830A1 true WO2018092830A1 (ja) | 2018-05-24 |
Family
ID=62145503
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/041213 WO2018092830A1 (ja) | 2016-11-17 | 2017-11-16 | 光学走査装置及び画像形成装置 |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN109964164B (ja) |
| WO (1) | WO2018092830A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7449158B2 (ja) * | 2020-04-30 | 2024-03-13 | キヤノン株式会社 | 画像形成装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004240275A (ja) * | 2003-02-07 | 2004-08-26 | Pentax Corp | レーザ走査装置 |
| JP2006065012A (ja) * | 2004-08-27 | 2006-03-09 | Pentax Corp | レーザ走査装置 |
| US20130033557A1 (en) * | 2011-08-03 | 2013-02-07 | Samsung Electronics Co., Ltd | Light scanning unit and image forming apparatus employing the same |
| JP2013238701A (ja) * | 2012-05-14 | 2013-11-28 | Ricoh Co Ltd | 光走査装置及び画像形成装置 |
| JP2015011160A (ja) * | 2013-06-28 | 2015-01-19 | キヤノン株式会社 | 画像形成装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3291906B2 (ja) * | 1994-04-11 | 2002-06-17 | キヤノン株式会社 | 走査光学装置 |
| US6677974B2 (en) * | 2001-03-21 | 2004-01-13 | Kabushiki Kaisha Toshiba | Light beam scanning apparatus with a multi-layer mirror structure |
| JP2003302594A (ja) * | 2002-04-08 | 2003-10-24 | Canon Inc | 偏向走査装置 |
| KR100445120B1 (ko) * | 2002-06-20 | 2004-08-21 | 삼성전자주식회사 | 동기신호 검출장치 |
| JP2004045822A (ja) * | 2002-07-12 | 2004-02-12 | Canon Inc | 光出射装置及び画像形成装置 |
| JP4378082B2 (ja) * | 2002-12-03 | 2009-12-02 | キヤノン株式会社 | 走査光学装置及びそれを用いた画像形成装置 |
| KR100456021B1 (ko) * | 2002-12-12 | 2004-11-08 | 삼성전자주식회사 | 동기신호 검출장치 |
| JP5137428B2 (ja) * | 2007-03-13 | 2013-02-06 | キヤノン株式会社 | 光走査装置及びそれを用いた画像形成装置 |
| US7710445B2 (en) * | 2007-08-31 | 2010-05-04 | Ricoh Company, Ltd. | Light source unit, optical scan apparatus, and image formation apparatus |
| KR20110012297A (ko) * | 2009-07-30 | 2011-02-09 | 삼성전자주식회사 | 광 주사 장치 및 이를 채용한 전자 사진 방식의 화상 형성 장치 |
| JP5494264B2 (ja) * | 2010-06-14 | 2014-05-14 | 富士ゼロックス株式会社 | 発光装置、プリントヘッドおよび画像形成装置 |
| JP5449302B2 (ja) * | 2011-12-08 | 2014-03-19 | 京セラドキュメントソリューションズ株式会社 | 光走査装置、及びこれを用いた画像形成装置 |
| JP6065556B2 (ja) * | 2011-12-19 | 2017-01-25 | 株式会社リコー | 画像形成装置、画像形成装置の調整方法、画像形成装置の生産方法、及び画像形成システム |
-
2017
- 2017-11-16 CN CN201780070279.2A patent/CN109964164B/zh active Active
- 2017-11-16 WO PCT/JP2017/041213 patent/WO2018092830A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004240275A (ja) * | 2003-02-07 | 2004-08-26 | Pentax Corp | レーザ走査装置 |
| JP2006065012A (ja) * | 2004-08-27 | 2006-03-09 | Pentax Corp | レーザ走査装置 |
| US20130033557A1 (en) * | 2011-08-03 | 2013-02-07 | Samsung Electronics Co., Ltd | Light scanning unit and image forming apparatus employing the same |
| JP2013238701A (ja) * | 2012-05-14 | 2013-11-28 | Ricoh Co Ltd | 光走査装置及び画像形成装置 |
| JP2015011160A (ja) * | 2013-06-28 | 2015-01-19 | キヤノン株式会社 | 画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109964164B (zh) | 2022-01-11 |
| CN109964164A (zh) | 2019-07-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8911112B2 (en) | Light emitting element adjusting and fixing structure, optical scanner, and image forming apparatus | |
| JP6526150B2 (ja) | 光学走査装置及び画像形成装置 | |
| JP5449302B2 (ja) | 光走査装置、及びこれを用いた画像形成装置 | |
| JP6813977B2 (ja) | 部品の実装方法及び電子モジュール | |
| WO2018092830A1 (ja) | 光学走査装置及び画像形成装置 | |
| JP5152268B2 (ja) | マルチビーム光走査装置 | |
| US10838318B2 (en) | Optical scanning apparatus and image forming apparatus | |
| JP6566655B2 (ja) | 走査光学装置 | |
| JP2018173438A (ja) | 光走査装置 | |
| JP5494281B2 (ja) | 光走査装置及び画像形成装置 | |
| US8305413B2 (en) | Optical writing apparatus and image forming apparatus, configured to include synchronous detector | |
| JP6529274B2 (ja) | 光学走査装置および光学走査装置システム | |
| JP6327475B2 (ja) | 画像形成装置用の光走査装置、及び該光走査装置を備えた画像形成装置 | |
| JP6584087B2 (ja) | 走査光学装置 | |
| JP5499003B2 (ja) | 光走査装置、及びこれを用いた画像形成装置 | |
| JP6790171B2 (ja) | 走査光学装置 | |
| JP6138618B2 (ja) | 光走査装置、及びそれを備えた画像形成装置 | |
| JP6036110B2 (ja) | 光走査装置および画像形成装置 | |
| JP6659123B2 (ja) | 走査光学装置及び画像形成装置 | |
| JP2008058884A (ja) | 走査露光装置及びこれを備えた画像形成装置 | |
| JP6624906B2 (ja) | 走査光学装置及び画像形成装置 | |
| JP6067485B2 (ja) | 光走査装置、及びそれを備えた画像形成装置 | |
| JP4913633B2 (ja) | 光書込装置および画像形成装置 | |
| JP2007227610A (ja) | 光源装置及び光学走査装置 | |
| JP2009093061A (ja) | 画像読取装置及びそれを備えた画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17871234 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17871234 Country of ref document: EP Kind code of ref document: A1 |