WO2016002629A1 - 肩甲骨筋入れ装置 - Google Patents
肩甲骨筋入れ装置 Download PDFInfo
- Publication number
- WO2016002629A1 WO2016002629A1 PCT/JP2015/068359 JP2015068359W WO2016002629A1 WO 2016002629 A1 WO2016002629 A1 WO 2016002629A1 JP 2015068359 W JP2015068359 W JP 2015068359W WO 2016002629 A1 WO2016002629 A1 WO 2016002629A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- peeling member
- scapula
- fixing jig
- carcass
- meat
- Prior art date
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
- A22C21/0069—Deboning poultry or parts of poultry
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
- A22C21/0023—Dividing poultry
- A22C21/003—Filleting poultry, i.e. extracting, cutting or shaping poultry fillets
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
- A22C21/0069—Deboning poultry or parts of poultry
- A22C21/0076—Deboning poultry legs and drumsticks
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
- A22C21/0023—Dividing poultry
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
- A22C21/0046—Support devices
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
- A22C21/0053—Transferring or conveying devices for poultry
-
- A—HUMAN NECESSITIES
- A22—BUTCHERING; MEAT TREATMENT; PROCESSING POULTRY OR FISH
- A22C—PROCESSING MEAT, POULTRY, OR FISH
- A22C21/00—Processing poultry
- A22C21/0069—Deboning poultry or parts of poultry
- A22C21/0084—Deboning poultry wings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B26—HAND CUTTING TOOLS; CUTTING; SEVERING
- B26D—CUTTING; DETAILS COMMON TO MACHINES FOR PERFORATING, PUNCHING, CUTTING-OUT, STAMPING-OUT OR SEVERING
- B26D3/00—Cutting work characterised by the nature of the cut made; Apparatus therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B26—HAND CUTTING TOOLS; CUTTING; SEVERING
- B26D—CUTTING; DETAILS COMMON TO MACHINES FOR PERFORATING, PUNCHING, CUTTING-OUT, STAMPING-OUT OR SEVERING
- B26D3/00—Cutting work characterised by the nature of the cut made; Apparatus therefor
- B26D3/24—Cutting work characterised by the nature of the cut made; Apparatus therefor to obtain segments other than slices, e.g. cutting pies
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B26—HAND CUTTING TOOLS; CUTTING; SEVERING
- B26D—CUTTING; DETAILS COMMON TO MACHINES FOR PERFORATING, PUNCHING, CUTTING-OUT, STAMPING-OUT OR SEVERING
- B26D7/00—Details of apparatus for cutting, cutting-out, stamping-out, punching, perforating, or severing by means other than cutting
- B26D7/01—Means for holding or positioning work
- B26D7/02—Means for holding or positioning work with clamping means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/20—Measuring arrangements characterised by the use of mechanical techniques for measuring contours or curvatures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B26—HAND CUTTING TOOLS; CUTTING; SEVERING
- B26D—CUTTING; DETAILS COMMON TO MACHINES FOR PERFORATING, PUNCHING, CUTTING-OUT, STAMPING-OUT OR SEVERING
- B26D2210/00—Machines or methods used for cutting special materials
- B26D2210/02—Machines or methods used for cutting special materials for cutting food products, e.g. food slicers
Definitions
- the disassembling and deboning treatment includes the step of separating a breastplate with wings from a skeletal part called "gala”. And, as a pretreatment of this separation process, there is a scapula muscle insertion process of separating a meat portion from a scapula of a poultry carcass.
- Patent Document 1 discloses means for performing a scapula musculoskeletization process using a cutting blade attached to a 4-axis control robot arm.
- the feeding bird carcass is conveyed while being fixed to a fixing jig referred to as a carrier, and the peeling member fixed facing the conveying path of the fixing jig is a scapula muscle inserting process
- a second peeling member provided above the conveyance path on the conveyance direction upstream side of the fixing jig of the first peeling member; A second driving device for moving the second peeling member in the vertical direction, The second driving device is operated to lower the second peeling member in accordance with the timing when the food bird carcass fixed to the fixing jig comes to the meat separating position below the second peeling member. And separating the meat attached to the clavicle of the feedbird carcass.
- the meat attached to the clavicle is separated from the clavicle before the scapula meat separation step, the meat separation of the scapula is facilitated.
- the upper half of the fixing jig 20 has a conical shape and is erected vertically with respect to the chain conveyor 12, but is configured to be tiltable as needed during conveyance.
- the chain conveyor 12 forms a transfer path of the fixing jig 20, and the fixing jig 20 is transferred along the transfer path.
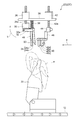
- FIG. 6 shows a control system of the present embodiment.
- the control device 74 controls the motor 16 to control the transport speed of the fixing jig 20.
- the measurement signal of the angle measurement sensor 72 is input to the external shape calculation unit 76 of the control device 74.
- the outer shape calculation unit 76 calculates the contact position with the work w from the axial length of the contact bar 66 and the angle with respect to the reference line of the contact bar 66 in contact with the work w using polar coordinates.
- An external shape (profile) is obtained by including the positional information of the fixing jig 20 input from the encoder 18 in this calculated value.
- a display unit (not shown) for displaying the outer shape of the workpiece w obtained in this manner is provided in the creasing unit 22.
- the display unit has a display 78 for displaying the outer shape of the workpiece w.
- FIG. 9 shows a control system of the musing unit 22 (22B).
- the controller 74 controls the servomotors 86 and 88 provided in the moving unit 84 based on the external shape profile of the work w displayed on the display 78, and the first support block 80 and the second support block 82. Adjust the interval with
Abstract
Description
脚部が分離され、かつ中抜きされて上半身だけとなった食鳥屠体上半身の自動解体・脱骨処理は、脱骨処理の全工程で正しい食鳥屠体の姿勢を保持するため、「固定冶具」と呼ばれる円錐形の固定冶具に載置固定した状態で、食鳥屠体を複数の処理部に順々に搬送し、解体・脱骨処理を行っている。
特許文献1には、4軸制御のロボットアームに装着された切断刃を用いて、肩甲骨筋入れ工程を行う手段が開示されている。
また、特許文献2には、食鳥屠体をキャリアと称される固定冶具に固定した状態で搬送し、この固定冶具の搬送経路に面して固定された剥離部材で、肩甲骨筋入れ工程を行う手段が開示されている。
また、特許文献2に開示された手段は、スクレーパが固定されているため、食鳥屠体を搬送経路に沿って移動させると、スクレーパが肩甲骨が結合されている肩関節部にぶつかり、肩関節部を破壊するおそれがある。そのため、肩甲骨に付着した肉の分離のみを行うことができない。また、破壊された肩関節部の骨片が骨部から分離した肉部に混入し、正肉としての価値を低下させるおそれがある。
食鳥屠体の肩甲骨と該肩甲骨に付着した肉部とを分離する肩甲骨筋入れ装置であって、
脚部が分離され中抜きされた食鳥屠体を載置固定するための固定冶具と、
前記固定冶具の搬送経路を形成し、前記固定冶具を該搬送経路に沿って搬送するためのコンベアと、
前記搬送経路の上方に上下動可能に設けられた第1の剥離部材と、
前記第1の剥離部材を上下方向へ移動させるための第1の駆動装置と、
前記固定冶具に固定された前記食鳥屠体が前記第1の剥離部材下方の肉分離位置に来たタイミングに合わせて、前記第1の駆動装置を作動させて前記第1の剥離部材を下降させ前記食鳥屠体の肩甲骨表面に沿わせ、前記第1の剥離部材を移動させ、
前記食鳥屠体の肩甲骨表面に沿わせ前記第1の剥離部材を移動させ、
前記肩甲骨から該肩甲骨に付着した肉部を分離する。
また、上記構成(1)により肩甲骨の筋入れ作業の自動化が可能となり、これによって、処理効率を向上できる。
前記第1の剥離部材は、前記搬送経路に沿い前記固定冶具の中心を通る中心線を挟んで該中心線の両側に配置された一対のスクレーパ部材で構成され、
前記一対のスクレーパ部材は前記食鳥屠体の搬送方向下流側に向けてスクレーパ部材間の間隔が徐々に狭まる向きに配置されている。
上記構成(1)によれば、上記一対のスクレーパ部材を食鳥屠体の肩甲骨の位置及び向きに合わせて配置できるため、筋入れ時、肩甲骨の表面に確実に倣わせることができる。これによって、分離された肉部の歩留まりを向上できる。
前記第1の剥離部材の前記固定冶具の搬送方向上流側で前記搬送経路の上方に設けられた第2の剥離部材と、
前記第2の剥離部材を上下方向へ移動させるための第2の駆動装置と、を備え、
前記固定冶具に固定された前記食鳥屠体が前記第2の剥離部材下方の肉分離位置に来たタイミングに合わせて、前記第2の駆動装置を作動させて前記第2の剥離部材を下降させ前記食鳥屠体の鎖骨に付着した肉部を分離する。
上記構成(3)によれば、肩甲骨肉分離工程の前で鎖骨に付着した肉部を鎖骨から分離するので、肩甲骨の肉分離が容易になる。
前記コンベアの基準点からの搬送距離を検出するための搬送距離検出部と、
前記搬送距離検出部で検出した検出値から前記第1の剥離部材及び前記第2の剥離部材の下降タイミングを決定し、前記第1の駆動装置及び前記第2の駆動装置を作動させて前記第1の剥離部材及び前記第2の剥離部材を下降させるための制御装置と、で構成されている同期装置を備える。
上記構成(4)によれば、上記搬送距離検出部によりコンベアの基準点(例えば始端)からの各固定冶具の移動距離を検出できるため、この検出値に基づいて第1の剥離部材及び第2の剥離部材の下降タイミングを正確に決定できる。これによって、肩甲骨及び鎖骨の肉分離を確実に行うことができる。
前記第2の剥離部材より前記固定冶具の搬送方向上流側の前記搬送経路に設けられた接触子と、
前記接触子が前記食鳥屠体の肩部表面に倣うように前記接触子を弾性的に支持するための弾性支持部と、
前記接触子が前記食鳥屠体に接触したときの前記接触子の位置情報が入力され、前記位置情報から前記食鳥屠体の外形形状を演算するための外形演算部と、を有する外形計測部をさらに備え、
前記制御装置は、前記搬送距離検出部で検出した検出値及び前記外形計測部で求めた前記食鳥屠体の外形形状から前記第1の剥離部材及び前記第2の剥離部材の下降タイミングを決定するものである。
前記第1の剥離部材及び前記第2の剥離部材は、単一の支持台に上下動可能に支持されている。
上記構成(6)によれば、第1の剥離部材及び第2の剥離部材を単一の支持台で支持できるため、第1の剥離部材及び第2の剥離部材の支持部を低コスト化できると共に、第1の剥離部材及び第2の剥離部材は一緒に動くため、これら剥離部材の制御が容易になる。そのため、同期装置及び制御装置を簡易かつ低コスト化できる。
前記第1の剥離部材を上下動可能に支持するための第1の支持台と、
前記第2の剥離部材を上下動可能に支持するための第2の支持台と、
前記第1の支持台と前記第2の支持台との間隔を前記固定冶具の搬送方向で可変とするための移動部と、をさらに備えている。
前記構成(7)によれば、固定冶具の搬送速度や搬送方向の間隔、さらには、食鳥屠体の外形形状に応じて、上記第1の支持台と上記第2の支持台との搬送方向間隔を変えることで、筋入れのハンドリングが容易になる。
前記弾性支持部は、前記第1の剥離部材と前記第1の剥離部材を支持する支持部材との間に介設されたエアシリンダで構成されている。
前記構成(8)によれば、第1の剥離部材から食鳥屠体に付加される弾性力の調整が、筋入れ装置の稼動中でも可能になるため、搬送中の食鳥屠体の大きさ(個体差)に応じて適正な弾性力を発揮できる。
前記弾性支持部は、前記第1の剥離部材と前記第1の剥離部材を支持する支持部材との間に介設されたバネ部材で構成されている。
前記構成(9)によれば、弾性支持部を簡易かつ低コスト化できる。
例えば、「ある方向に」、「ある方向に沿って」、「平行」、「直交」、「中心」、「同心」或いは「同軸」等の相対的或いは絶対的な配置を表す表現は、厳密にそのような配置を表すのみならず、公差、若しくは、同じ機能が得られる程度の角度や距離をもって相対的に変位している状態も表すものとする。
例えば、「同一」、「等しい」及び「均質」等の物事が等しい状態であることを表す表現は、厳密に等しい状態を表すのみならず、公差、若しくは、同じ機能が得られる程度の差が存在している状態も表すものとする。
例えば、四角形状や円筒形状等の形状を表す表現は、幾何学的に厳密な意味での四角形状や円筒形状等の形状を表すのみならず、同じ効果が得られる範囲で、凹凸部や面取り部等を含む形状も表すものとする。
一方、一つの構成要素を「備える」、「具える」、「具備する」、「含む」、又は「有する」という表現は、他の構成要素の存在を除外する排他的な表現ではない。
チェーンコンベア12には、「コーン」と呼ばれる複数の固定冶具20が等間隔に装着される。図示した実施形態では、固定冶具20の上半分は円錐形を有し、チェーンコンベア12に対して垂直方向に立設されるが、搬送途中で必要に応じ傾斜可能に構成される。
チェーンコンベア12は固定冶具20の搬送経路を形成し、固定冶具20はこの搬送経路に沿って搬送される。
例示的な実施形態では、チェーンコンベア12の基準点からの固定冶具20の搬送距離を検出するための搬送距離検出部を備えている。
上記搬送距離検出部は、例えば、モータ16に設けられモータ16の累計回転数を検出するエンコーダ18で構成される。エンコーダ18でモータ16の累計回転数を計測することで、例えばモータ位置を基準点としてモータ位置からの各固定冶具20の移動量(搬送距離)を検出できる。
筋入れ部22は、チェーンコンベア12の上方に上下動可能に設けられた第1の剥離部材24と、第1の剥離部材24を上下方向へ移動させるための駆動装置(第1の駆動装置)とを備えている。
上記駆動装置は、例えば、図2に示すように、支持台28に支持されたサーボモータ26で構成される。サーボモータ26は、支持台36を上下に貫通するネジ軸26aを回転させる。ネジ軸26aには、ネジ軸26aの回転によってネジ軸26a上を摺動する可動ブロック30が設けられる。ブラケット32は、一端が軸32aを介して可動ブロック30に回動可能に装着され、他端から第1の剥離部材24が垂下される。
上記弾性支持部は、図2及び図8に示す筋入れ部22(22A、22B)では、支持台28に固定されたエアシリンダ34で構成され、エアシリンダ34のピストンロッド34aは下方に向けて支持台28を貫通し、第1の剥離部材24が固定された側のブラケット32の端部に結合されている。
上記弾性支持部は、図10に示す筋入れ部22(22C)では、支持台28とブラケット32との間に介装されたコイルバネ36で構成されている。
また、筋入れ部22は、固定冶具20に固定されたワークwが第1の剥離部材下方の肉分離位置に来たタイミングに合わせて、サーボモータ26を作動させて第1の剥離部材24を下降させワークwの肩甲骨表面に沿わせ第1の剥離部材24を移動させるように構成されている。例示的な実施形態では、第1の剥離部材24にかかる動作を可能にする同期装置を備える。
かかる構成により、上記肉分離位置に来たワークwの肩甲骨に付着した肉部を分離する。
かかる形状のスクレーパ部材24a及び24bが下降した時、ワークwの肩甲骨の表面に接触し、肩甲骨の表面に付着した肉部を肩甲骨から歩留まり良く分離できる。
また、固定冶具20に固定されたワークwが第2の剥離部材下方の肉分離位置に来たタイミングに合わせて、サーボモータ42を作動させて第2の剥離部材40を下降させる同期装置を備える。
かかる構成により、上記肉分離位置に来たワークwに対して第2の剥離部材40を下降させ、鎖骨に付着した肉部を分離する。
上記同期装置は、例えば、図2に示すように、支持台28に支持されたサーボモータ42で構成される。
図2及び図3に図示した実施形態では、第2の剥離部材40は、スクレーパ部材40a、40b、40c及び40dで構成されている。搬送方向上流側に配置された一対のスクレーパ部材40a及び40bは、中心線Cに対し平行でかつ対称に配置され、搬送方向下流側に配置された一対のスクレーパ部材40c及び40dは、中心線Cに対し直角でかつ対称に配置されている。
上記構成のスクレーパ部材40a~40dによって、ワークwの鎖骨の両外側にスクレーパ部材40a~40dが入り込み、鎖骨に付着した肉部を分離できる。
上記同期装置は、エンコーダ18で検出した検出値から、制御装置52によって第1の剥離部材24の下降タイミングを決定し、サーボモータ26を作動させ、第1の剥離部材24を下降させる。筋入れ部22(22A、22B)では、第1の剥離部材24と同時にエアシリンダ34を作動させ、ブラケット32を水平に保ったまま下降させる。これによって、第1の剥離部材24を構成するスクレーパ部材24a及び24bを垂直方向のまま下降できる。
また、上記同期装置は、エンコーダ18で検出した検出値から、制御装置52で第2の剥離部材40の下降タイミングを決定し、サーボモータ42を作動させて第2の剥離部材40を下降させる。
外形計測部60は、搬送経路上方に設けられた接触子66と、接触子66がワークwの肩部表面に倣うように接触子66を弾性的に支持するための弾性支持部と、接触子66がワークwに接触したときの接触子66の位置情報が入力される外形演算部76とを備えている。外形演算部76は制御装置74に内蔵され、入力された接触子66の位置情報からワークwの外形形状を演算する。
制御装置74は、エンコーダ18で検出した検出値及び外形計測部60で求めたワークwの外形形状から第2の剥離部材24又は第2の剥離部材40の下降タイミングを決定する。
計測ブロック62には、上記弾性支持部としてエアシリンダ68が設けられ、エアシリンダ68のピストンロッド68aはアーム70を介して支軸64に接続されている。接触バー66の他端は、固定冶具20の搬送経路上を接近してくるワークwの肩部sに接触するように位置決めされている。接触バー66がワークwの肩部sに接触した時、エアシリンダ68の付勢力(弾性力)が接触バー66に付加され、これによって、接触バー66は肩部sの表面を倣うことができる。支軸64には支軸64の回転角度を計測する角度計測センサ72が設けられている。
こうして求めたワークwの外形形状を表示する表示部(不図示)が筋入れ部22に設けられる。該表示部はワークwの外形形状を表示するディスプレイ78を有している。
エンコーダ18、外形計測部60及び制御装置74で、第1の剥離部材24及び第2の剥離部材40の下降タイミングを決定する同期装置を構成している。
この実施形態では、エンコーダ18から制御装置74に入力される各固定冶具20の位置情報に加えて、ディスプレイ78に表示される外形形状プロファイルに基づいて、第1の剥離部材24及び第2の剥離部材40の下降タイミングを決定する。
この実施形態では、サーボモータ86及び88を稼動させ、ネジ軸86a及び88aを回転させることで、第1の支持ブロック80と第2の支持ブロック82との搬送方向の間隔を可変とすることができる。
第1の支持ブロック80の底壁を構成する支持板80aには、図2に示す筋入れ部22(22A)と同様に、サーボモータ26及びエアシリンダ34が固定されると共に、ネジ軸26a及びピストンロッド34aには、可動ブロック30、ブラケット32及び第1の剥離部材24が装着されている。
また、第2の支持ブロック82の底壁を構成する支持板82aには、サーボモータ42が固定されると共に、ネジ軸42aには、図2に示す筋入れ部22(22A)と同様に、可動ブロック44及びL型ブロック46を介して第2の剥離部材40が装着されている。
例示的な実施形態では、上記弾性支持部は、図10に示す筋入れ部22(22C)のように、支持台28とブラケット32との間に介設されたコイルバネ36で構成される。
また、第1の剥離部材24は上記弾性支持部によって弾性的に支持されるため、ワークwから第1の剥離部材24に一定以上の反力が加わると、第1の剥離部材24は搬送方向下流側(矢印b方向)へ逃げることができる。そのため、第1の剥離部材24によってワークwに過剰の力が付加されず、ワークwの骨部などの破壊を防止できると共に、第1の剥離部材24をワークwの表面に沿って倣わせることができ、これによって、分離後の肉部の歩留まりを向上できる。
また、筋入れ部22によって肩筋入れ工程を自動化できるため、処理効率を向上できる。
また、第1の剥離部材24の搬送方向上流側に第2の剥離部材40を備えているので、肩甲骨肉分離工程の前で鎖骨に付着した肉部を鎖骨から分離でき、これによって、肩甲骨の肉分離が容易になる。
また、エンコーダ18でチェーンコンベア12の基準点からの各固定冶具20の搬送距離を検出し、その位置情報に基づいて、第1の剥離部材24及び第2の剥離部材40の下降タイミングを決定するので、肩甲骨及び鎖骨の肉分離を確実に行うことができる。
さらに、接触子66はワークwの肩部表面に倣うように弾性的に支持されるので、ワークwの肩部表面に確実に倣わせることができる。
また、図8及び図9に示す筋入れ部22(22C)では、第2の剥離部材24及び第2の剥離部材40は、夫々別個の第1の支持台80及び第2の支持台82に支持され、第1の支持台80と第2の支持台82とは、移動部84によって搬送方向の間隔を調整可能であるので、固定冶具20の搬送速度や搬送方向の間隔、さらには、各ワークの大きさ及び外形形状に合わせて筋入れしやすい最適な間隔に調整できる。
また、図10に示す筋入れ部22(22C)では、第2の剥離部材24はコイルバネ36で弾性的に支持されるので、弾性支持部を簡易かつ低コスト化できる。
12 チェーンコンベア
14 駆動スプロケット
16 モータ
18 エンコーダ(搬送距離検出部)
20 固定冶具
22(22A、22B、22C) 筋入れ部
24 第1の剥離部材
24a、24b スクレーパ部材
26、42、86,88 サーボモータ
26a、42a、86a、88a ネジ軸
28 支持台
30、44 可動ブロック
32 ブラケット
34 エアシリンダ(弾性支持部)
34a ピストンロッド
36 コイルバネ(弾性支持部)
40 第2の剥離部材
40a、40b、40c、40d スクレーパ部材
46 L型ブロック
48 補強棒
50 鎬
52,74 制御装置
60 外形計測部
61 支持フレーム
62 計測ブロック
64 支軸
66 接触バー(接触子)
70 アーム
72 角度計測センサ
76 外形演算部
78 ディスプレイ
80 第1の支持ブロック
80a 支持板
82 第2の支持ブロック
82a 支持板
84 移動部
90、92 軸受
C 中心線
s 肩部
w ワーク(食鳥屠体)
Claims (9)
- 食鳥屠体の肩甲骨と該肩甲骨に付着した肉部とを分離する肩甲骨筋入れ装置であって、
脚部が分離され中抜きされた食鳥屠体を載置固定するための固定冶具と、
前記固定冶具の搬送経路を形成し、前記固定冶具を該搬送経路に沿って搬送するコンベアと、
前記搬送経路の上方に上下動可能に設けられた第1の剥離部材と、
前記第1の剥離部材を上下方向へ移動させるための第1の駆動装置とを備え、
前記固定冶具に固定された前記食鳥屠体が前記第1の剥離部材下方の肉分離位置に来たタイミングに合わせて、前記第1の駆動装置を作動させて前記第1の剥離部材を下降させ前記食鳥屠体の肩甲骨表面に沿わせ前記第1の剥離部材を移動させ、
前記肩甲骨から該肩甲骨に付着した肉部を分離することを特徴とする肩甲骨筋入れ装置。 - 前記第1の剥離部材は、前記搬送経路に沿い前記固定冶具の中心を通る中心線を挟んで該中心線の両側に配置された一対のスクレーパ部材で構成され、
前記一対のスクレーパ部材は前記食鳥屠体の搬送方向下流側に向けてスクレーパ部材間の間隔が徐々に狭まる向きに配置されていることを特徴とする請求項1に記載の肩甲骨筋入れ装置。 - 前記第1の剥離部材の前記固定冶具の搬送方向上流側で前記搬送経路の上方に設けられた第2の剥離部材と、
前記第2の剥離部材を上下方向へ移動させるための第2の駆動装置と、を備え、
前記固定冶具に固定された前記食鳥屠体が前記第2の剥離部材下方の肉分離位置に来たタイミングに合わせて、前記第2の駆動装置を作動させて前記第2の剥離部材を下降させ前記食鳥屠体の鎖骨に付着した肉部を分離することを特徴とする請求項1又は2に記載の肩甲骨筋入れ装置。 - 前記コンベアの基準点からの前記固定冶具の搬送距離を検出するための搬送距離検出部と、
前記搬送距離検出部で検出した検出値から前記第1の剥離部材及び前記第2の剥離部材の下降タイミングを決定し、前記第1の駆動装置及び前記第2の駆動装置を作動させて前記第1の剥離部材及び前記第2の剥離部材を下降させるための制御装置と、で構成されている同期装置を備えることを特徴とする請求項1乃至3の何れか1項に記載の肩甲骨筋入れ装置。 - 前記第2の剥離部材より前記固定冶具の搬送方向上流側の前記搬送経路に設けられた接触子と、
前記接触子が前記食鳥屠体の肩部表面に倣うように前記接触子を弾性的に支持するための弾性支持部と、
前記接触子が前記食鳥屠体に接触したときの前記接触子の位置情報が入力され、前記位置情報から前記食鳥屠体の外形形状を演算するための外形演算部と、を有する外形計測部をさらに備え、
前記制御装置は、前記搬送距離検出部で検出した検出値及び前記外形計測部で求めた前記食鳥屠体の外形形状から前記第1の剥離部材及び前記第2の剥離部材の下降タイミングを決定するものであることを特徴とする請求項4に記載の肩甲骨筋入れ装置。 - 前記第1の剥離部材及び前記第2の剥離部材は、単一の支持台に上下動可能に支持されていることを特徴とする請求項3乃至5の何れか1項に記載の肩甲骨筋入れ装置。
- 前記第1の剥離部材を上下動可能に支持するための第1の支持台と、
前記第2の剥離部材を上下動可能に支持するための第2の支持台と、
前記第1の支持台と前記第2の支持台との間隔を前記固定冶具の搬送方向で可変とするための移動部と、をさらに備えていることを特徴とする請求項3乃至5の何れか1項に記載の肩甲骨筋入れ装置。 - 前記弾性支持部は、前記第1の剥離部材と前記第1の剥離部材を支持する支持部材との間に介設されたエアシリンダで構成されていることを特徴とする請求項1乃至7の何れか1項に記載の肩甲骨筋入れ装置。
- 前記弾性支持部は、前記第1の剥離部材と前記第1の剥離部材を支持する支持部材との間に介設されたバネ部材で構成されていることを特徴とする請求項1乃至7の何れか1項に記載の肩甲骨筋入れ装置。
Priority Applications (13)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| BR112016029770-9A BR112016029770B1 (pt) | 2014-06-30 | 2015-06-25 | Aparelho para realizar incisão em escápula |
| ES15814418.8T ES2689478T3 (es) | 2014-06-30 | 2015-06-25 | Aparato de incisión de escápula |
| DK15814418.8T DK3162213T3 (en) | 2014-06-30 | 2015-06-25 | SHOULDER CUTTING DEVICE |
| JP2016531318A JP6216056B2 (ja) | 2014-06-30 | 2015-06-25 | 肩甲骨筋入れ装置 |
| US15/322,728 US9706782B2 (en) | 2014-06-30 | 2015-06-25 | Shoulder-blade incision-making apparatus |
| MYPI2016704825A MY188560A (en) | 2014-06-30 | 2015-06-25 | Shoulder-blade incision-making apparatus |
| KR1020177002392A KR101852733B1 (ko) | 2014-06-30 | 2015-06-25 | 견갑골 절개 장치 |
| MX2016016819A MX2016016819A (es) | 2014-06-30 | 2015-06-25 | Dispositivo de incision de escapula. |
| CA2953893A CA2953893C (en) | 2014-06-30 | 2015-06-25 | Shoulder-blade incision-making apparatus |
| AU2015285485A AU2015285485B2 (en) | 2014-06-30 | 2015-06-25 | Scapula incision device |
| PL15814418T PL3162213T3 (pl) | 2014-06-30 | 2015-06-25 | Urządzenie do nacinania łopatki |
| EP15814418.8A EP3162213B1 (en) | 2014-06-30 | 2015-06-25 | Scapula incision device |
| PH12016502486A PH12016502486B1 (en) | 2014-06-30 | 2016-12-13 | Shoulder-blade incision-making apparatus |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-134088 | 2014-06-30 | ||
| JP2014-134086 | 2014-06-30 | ||
| JP2014134086 | 2014-06-30 | ||
| JP2014134087 | 2014-06-30 | ||
| JP2014-134087 | 2014-06-30 | ||
| JP2014134088 | 2014-06-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016002629A1 true WO2016002629A1 (ja) | 2016-01-07 |
Family
ID=55019169
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/068359 WO2016002629A1 (ja) | 2014-06-30 | 2015-06-25 | 肩甲骨筋入れ装置 |
| PCT/JP2015/068360 WO2016002630A1 (ja) | 2014-06-30 | 2015-06-25 | 食鳥屠体の外形計測装置、外形計測方法、及び食鳥屠体の脱骨装置 |
| PCT/JP2015/068358 WO2016002628A1 (ja) | 2014-06-30 | 2015-06-25 | ササミ採取装置 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/068360 WO2016002630A1 (ja) | 2014-06-30 | 2015-06-25 | 食鳥屠体の外形計測装置、外形計測方法、及び食鳥屠体の脱骨装置 |
| PCT/JP2015/068358 WO2016002628A1 (ja) | 2014-06-30 | 2015-06-25 | ササミ採取装置 |
Country Status (15)
| Country | Link |
|---|---|
| US (3) | US9700060B2 (ja) |
| EP (3) | EP3162213B1 (ja) |
| JP (3) | JP6262344B2 (ja) |
| KR (3) | KR101896854B1 (ja) |
| AU (3) | AU2015285484B2 (ja) |
| CA (3) | CA2954039C (ja) |
| CL (3) | CL2016003265A1 (ja) |
| DK (1) | DK3162213T3 (ja) |
| ES (1) | ES2689478T3 (ja) |
| HU (1) | HUE039817T2 (ja) |
| MX (3) | MX2016016819A (ja) |
| MY (3) | MY188560A (ja) |
| PH (3) | PH12016502486B1 (ja) |
| PL (1) | PL3162213T3 (ja) |
| WO (3) | WO2016002629A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024029343A1 (ja) * | 2022-08-03 | 2024-02-08 | 株式会社前川製作所 | 食鳥処理装置 |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL2016700B1 (en) * | 2016-04-29 | 2017-11-16 | Marel Stork Poultry Proc Bv | System and method for measuring a shoulder joint position of a carcass part of slaughtered poultry. |
| JP6735055B2 (ja) * | 2016-09-28 | 2020-08-05 | プライフーズ株式会社 | 食鳥屠体ササミ筋入機構 |
| JP6735054B2 (ja) * | 2016-09-28 | 2020-08-05 | プライフーズ株式会社 | 食鳥屠体ササミ筋入装置 |
| NL2019364B1 (en) * | 2017-07-28 | 2019-02-19 | Meyn Food Processing Tech Bv | Scapula harvester for operating on a poultry carcass |
| HUE063485T2 (hu) * | 2017-10-06 | 2024-01-28 | Maekawa Seisakusho Kk | Befogó eszköz csonton lévõ láb-húshoz, betöltõ eszköz csonton lévõ láb húshoz, és eljárás csonton lévõ láb-hús befogására |
| JP6946169B2 (ja) * | 2017-12-25 | 2021-10-06 | 株式会社前川製作所 | 骨付き肉の軟骨切断装置及び軟骨切断方法 |
| CN108184972B (zh) * | 2018-03-01 | 2020-05-12 | 岳西神农氏农业科技有限公司 | 一种鸡爪腿部切缝装置 |
| CN108262777A (zh) * | 2018-03-02 | 2018-07-10 | 刘书雄 | 一种中药材的切药装置 |
| CN109329360B (zh) * | 2018-09-26 | 2021-06-25 | 北海智联投资有限公司 | 一种将备烤鸡扒开辅助装置 |
| CN109349327B (zh) * | 2018-09-27 | 2021-07-02 | 北海智联投资有限公司 | 一种自动扒开鸡肚皮并撑开鸡肚皮装置 |
| US11202452B2 (en) | 2019-04-08 | 2021-12-21 | Provisor Technologies, Inc. | Apparatus and method for cutting meat products into blocks of meat |
| DE102019119665B3 (de) * | 2019-07-19 | 2020-06-25 | Nordischer Maschinenbau Rud. Baader Gmbh + Co. Kg | Vorrichtung zum Messen der Schultergelenkposition kontinuierlich geförderter Geflügelkörper, Anordnung zum Filetieren von Geflügelkörpern sowie entsprechende Verfahren |
| KR102121205B1 (ko) * | 2019-10-22 | 2020-06-10 | 김만섭 | 가금류에서 위시본을 분리하는 위시본 분리장치 |
| KR102121204B1 (ko) * | 2019-10-22 | 2020-06-10 | 김만섭 | 가금류에서 위시본을 분리하는 관통부가 포함된 위시본 분리장치 |
| JP2021177710A (ja) * | 2020-05-12 | 2021-11-18 | 株式会社前川製作所 | ワーク計測装置及び筋入れシステム |
| EP4149269A1 (de) | 2020-05-15 | 2023-03-22 | Nordischer Maschinenbau Rud. Baader GmbH + Co. KG | Transportvorrichtung zum transportieren von entweideten geflügelkörpern oder teilen davon sowie vorrichtung und verfahren zum aufsatteln und verarbeiten der geflügelkörper oder teilen davon |
| CN111887285A (zh) * | 2020-07-28 | 2020-11-06 | 从海彬 | 一种鸡腿去骨设备 |
| CN112088924B (zh) * | 2020-09-11 | 2022-02-25 | 衢州学院 | 一种鸡爪表面自动切割装置 |
| US20220167635A1 (en) * | 2020-11-27 | 2022-06-02 | Ace, Llc | Automated Chicken Deboner System and Method |
| US11751578B2 (en) | 2021-12-31 | 2023-09-12 | Ocean Research Center Of Zhoushan, Zhejiang University | Intelligent methods and devices for cutting squid white slices |
| WO2023237912A1 (en) * | 2022-06-08 | 2023-12-14 | Tmec Indústria E Comércio De Equipamentos Industriais Ltda-Me | Automated system and method for the hanging of live birds to slaughter |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11266780A (ja) * | 1998-01-21 | 1999-10-05 | Mayekawa Mfg Co Ltd | 鶏肉屠体上半身の脱骨自動処理方法とその装置 |
| JP2011125317A (ja) * | 2009-12-21 | 2011-06-30 | Prifoods Co Ltd | 食鳥屠体筋入れ装置 |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3736401C1 (de) * | 1987-10-28 | 1989-03-02 | Nordischer Maschinenbau | Vorrichtung zum Enthaeuten von Gefluegelkoerpern |
| ES2035375T3 (es) * | 1989-01-28 | 1993-04-16 | Nordischer Maschinenbau Rud. Baader Gmbh + Co Kg | Procedimiento para la obtencion mecanica de carne de los cuerpos de aves y dispositivo para la realizacion del procedimiento. |
| DE3939340C1 (ja) * | 1989-11-29 | 1991-06-06 | Nordischer Maschinenbau Rud. Baader Gmbh + Co Kg, 2400 Luebeck, De | |
| NL9200037A (nl) | 1992-01-10 | 1993-08-02 | Stork Pmt | Werkwijze en inrichting voor het fileren van de romp van een geslachte vogel. |
| NL9200733A (nl) * | 1992-04-22 | 1993-11-16 | Passchier Bob | Inrichting en werkwijzen voor het losnemen en/of verwijderen van vlees en dergelijke van dierkoppen. |
| NL9201426A (nl) * | 1992-04-23 | 1993-11-16 | Stork Protecon Bv | Werkwijze en inrichting voor het voor machinale ontbening voorbereiden van een varkenskop. |
| US5314374A (en) | 1993-06-14 | 1994-05-24 | Jay Koch | Apparatus for removing tenders from a poultry carcass |
| US5368520A (en) * | 1994-01-18 | 1994-11-29 | Koch; Jay | Apparatus and method for separating wings and attached breasts from poultry carcasses |
| US5573454A (en) * | 1994-06-17 | 1996-11-12 | Devro-Teepak, Inc. | Method and apparatus for aligning labels on shirred food casings |
| NL9401198A (nl) * | 1994-07-21 | 1996-03-01 | Stork Pmt | Werkwijze en inrichting voor het fileren van de romp van geslacht gevogelte. |
| NL1000935C2 (nl) * | 1995-08-04 | 1997-02-06 | Stork Pmt | Inrichting en werkwijze voor het bewerken van een slachtdier. |
| US5954574A (en) | 1997-08-12 | 1999-09-21 | Verrijp; Bastiaan | Wing remover |
| US6322437B1 (en) * | 1997-10-17 | 2001-11-27 | Nordischer Maschinenbau Rud. Baader Gmbh + Co Kg | Method for stripping the muscle meat from fish and device for carrying out this method |
| US6042469A (en) * | 1998-04-06 | 2000-03-28 | Wagner; Rory | Air clamp |
| DE19848498A1 (de) | 1998-10-21 | 2000-05-04 | Nordischer Maschinenbau | Filetiervorrichtung |
| JP4222878B2 (ja) | 2002-05-31 | 2009-02-12 | 株式会社栗本鐵工所 | ガス化溶融炉の空気加熱管用高温耐食材料 |
| WO2004052106A1 (ja) | 2002-12-11 | 2004-06-24 | Mayekawa Mfg.Co.,Ltd. | 鶏肉屠体上半身の自動脱骨処理装置 |
| GB2421676B (en) * | 2004-12-30 | 2010-03-24 | Fmc Technologies | Portioning apparatus and method |
| WO2006077673A1 (ja) * | 2005-01-20 | 2006-07-27 | Mayekawa Mfg. Co., Ltd | 魚体の鰭除去装置 |
| NL1029227C2 (nl) * | 2005-06-10 | 2006-12-12 | Meyn Food Proc Technology Bv | Werkwijze en inrichting voor het oogsten van een binnenfilet van gevogelte. |
| CA2552168A1 (en) * | 2005-07-18 | 2007-01-18 | Groupe Grb Inc. | Artificial vision inspection method and system |
| DE102005047752B3 (de) * | 2005-09-28 | 2006-10-05 | Nordischer Maschinenbau Rud. Baader Gmbh + Co Kg | Vorrichtung und Verfahren zum Oberflächentrimmen von Fleisch sowie Vorrichtung zum Verarbeiten von Fleisch mit einer Vorrichtung zum Oberflächentrimmen |
| BRPI0622404B1 (pt) | 2005-12-09 | 2015-11-24 | Stork Pmt | dispositivo e método para processar uma parte da carcaça da ave abatida |
| DE102006021526B3 (de) * | 2006-05-06 | 2007-09-20 | Nordischer Maschinenbau Rud. Baader Gmbh + Co. Kg | Werkzeug, Vorrichtung sowie Verfahren zum Entweiden von in der Bauchhöhle geöffneten Fischen |
| DE102006040454B3 (de) * | 2006-08-25 | 2007-12-06 | Nordischer Maschinenbau Rud. Baader Gmbh + Co. Kg | Haltevorrichtung zur Halterung von entweideten Geflügelkörpern oder Teilen davon |
| DE102007050857A1 (de) * | 2007-10-24 | 2009-04-30 | Weber Maschinenbau Gmbh Breidenbach | Fettauflagenvermessungseinrichtung |
| JP5455710B2 (ja) * | 2010-02-27 | 2014-03-26 | プライフーズ株式会社 | 食鳥屠体肩関節位置検知装置 |
| NL2004662C2 (en) * | 2010-05-04 | 2011-11-08 | Meyn Food Proc Technology Bv | A method for filleting poultry or poultry parts and a filleting system for such poultry or poultry parts. |
| DE102011010110A1 (de) * | 2011-02-02 | 2012-08-02 | Weber Maschinenbau Gmbh Breidenbach | Vorrichtung und Verfahren zum Abtragen einer Oberflächenschicht von Lebensmittelprodukten |
| JP5818518B2 (ja) | 2011-06-06 | 2015-11-18 | 株式会社前川製作所 | 手羽付き胸肉の分離方法及び装置 |
| JP5623352B2 (ja) | 2011-07-13 | 2014-11-12 | 株式会社前川製作所 | 胸側骨格の分離方法及び装置 |
| WO2013136995A1 (ja) * | 2012-03-13 | 2013-09-19 | 株式会社前川製作所 | 骨付き食肉の肩甲骨除去装置及び方法、並びに、該装置を備える骨付き食肉の脱骨システム |
| WO2013136993A1 (ja) * | 2012-03-13 | 2013-09-19 | 株式会社前川製作所 | 骨付き食肉の搬送装置及び方法、並びに、該装置を備える骨付き食肉の脱骨システム |
-
2015
- 2015-06-25 EP EP15814418.8A patent/EP3162213B1/en active Active
- 2015-06-25 JP JP2016531317A patent/JP6262344B2/ja active Active
- 2015-06-25 DK DK15814418.8T patent/DK3162213T3/en active
- 2015-06-25 PL PL15814418T patent/PL3162213T3/pl unknown
- 2015-06-25 WO PCT/JP2015/068359 patent/WO2016002629A1/ja active Application Filing
- 2015-06-25 EP EP15815135.7A patent/EP3162215A4/en not_active Withdrawn
- 2015-06-25 MY MYPI2016704825A patent/MY188560A/en unknown
- 2015-06-25 JP JP2016531319A patent/JP6216057B2/ja active Active
- 2015-06-25 HU HUE15814418A patent/HUE039817T2/hu unknown
- 2015-06-25 AU AU2015285484A patent/AU2015285484B2/en not_active Ceased
- 2015-06-25 CA CA2954039A patent/CA2954039C/en active Active
- 2015-06-25 US US15/323,094 patent/US9700060B2/en active Active
- 2015-06-25 ES ES15814418.8T patent/ES2689478T3/es active Active
- 2015-06-25 KR KR1020177002390A patent/KR101896854B1/ko active IP Right Grant
- 2015-06-25 JP JP2016531318A patent/JP6216056B2/ja active Active
- 2015-06-25 MY MYPI2016704826A patent/MY189012A/en unknown
- 2015-06-25 MX MX2016016819A patent/MX2016016819A/es active IP Right Grant
- 2015-06-25 WO PCT/JP2015/068360 patent/WO2016002630A1/ja active Application Filing
- 2015-06-25 KR KR1020177002392A patent/KR101852733B1/ko active IP Right Grant
- 2015-06-25 EP EP15814808.0A patent/EP3162214A4/en not_active Withdrawn
- 2015-06-25 MX MX2016016570A patent/MX2016016570A/es unknown
- 2015-06-25 AU AU2015285486A patent/AU2015285486B2/en not_active Ceased
- 2015-06-25 MY MYPI2016704841A patent/MY175780A/en unknown
- 2015-06-25 US US15/322,730 patent/US9687007B2/en active Active
- 2015-06-25 WO PCT/JP2015/068358 patent/WO2016002628A1/ja active Application Filing
- 2015-06-25 AU AU2015285485A patent/AU2015285485B2/en not_active Ceased
- 2015-06-25 US US15/322,728 patent/US9706782B2/en active Active
- 2015-06-25 CA CA2953893A patent/CA2953893C/en active Active
- 2015-06-25 MX MX2016016681A patent/MX2016016681A/es unknown
- 2015-06-25 KR KR1020177002393A patent/KR101852734B1/ko active IP Right Grant
- 2015-06-25 CA CA2953896A patent/CA2953896C/en active Active
-
2016
- 2016-12-13 PH PH12016502486A patent/PH12016502486B1/en unknown
- 2016-12-13 PH PH12016502487A patent/PH12016502487A1/en unknown
- 2016-12-13 PH PH12016502488A patent/PH12016502488B1/en unknown
- 2016-12-20 CL CL2016003265A patent/CL2016003265A1/es unknown
- 2016-12-20 CL CL2016003267A patent/CL2016003267A1/es unknown
- 2016-12-20 CL CL2016003266A patent/CL2016003266A1/es unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11266780A (ja) * | 1998-01-21 | 1999-10-05 | Mayekawa Mfg Co Ltd | 鶏肉屠体上半身の脱骨自動処理方法とその装置 |
| JP2011125317A (ja) * | 2009-12-21 | 2011-06-30 | Prifoods Co Ltd | 食鳥屠体筋入れ装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3162213A4 * |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2024029343A1 (ja) * | 2022-08-03 | 2024-02-08 | 株式会社前川製作所 | 食鳥処理装置 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016002629A1 (ja) | 肩甲骨筋入れ装置 | |
| WO2016002631A1 (ja) | 肩筋入れ装置及び肩筋入れ方法 | |
| JP6081019B2 (ja) | 骨付き肉の脱骨装置及び脱骨方法 | |
| TWI680718B (zh) | 帶骨肉之全長測定裝置及帶骨肉之全長測定方法 | |
| KR102331415B1 (ko) | 뼈 있는 다리살의 처리 시스템 및 분리육의 제조 방법 | |
| JP7018454B2 (ja) | 骨付き肉の筋入れ装置及び骨付き肉の筋入れ方法 | |
| BR112016029770B1 (pt) | Aparelho para realizar incisão em escápula |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15814418 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2016531318 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 12016502486 Country of ref document: PH |
|
| WWE | Wipo information: entry into national phase |
Ref document number: MX/A/2016/016819 Country of ref document: MX |
|
| ENP | Entry into the national phase |
Ref document number: 2953893 Country of ref document: CA |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15322728 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112016029770 Country of ref document: BR |
|
| ENP | Entry into the national phase |
Ref document number: 2015285485 Country of ref document: AU Date of ref document: 20150625 Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 20177002392 Country of ref document: KR Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015814418 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015814418 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 112016029770 Country of ref document: BR Kind code of ref document: A2 Effective date: 20161219 |