WO2012073500A1 - 変形性薄物展開装置および変形性薄物展開方法 - Google Patents
変形性薄物展開装置および変形性薄物展開方法 Download PDFInfo
- Publication number
- WO2012073500A1 WO2012073500A1 PCT/JP2011/006689 JP2011006689W WO2012073500A1 WO 2012073500 A1 WO2012073500 A1 WO 2012073500A1 JP 2011006689 W JP2011006689 W JP 2011006689W WO 2012073500 A1 WO2012073500 A1 WO 2012073500A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- end point
- control
- deformable thin
- thin object
- gripping
- Prior art date
Links
Images































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q3/00—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine
- B23Q3/18—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine for positioning only
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/023—Cartesian coordinate type
- B25J9/026—Gantry-type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F67/00—Details of ironing machines provided for in groups D06F61/00, D06F63/00, or D06F65/00
- D06F67/04—Arrangements for feeding or spreading the linen
-
- D—TEXTILES; PAPER
- D06—TREATMENT OF TEXTILES OR THE LIKE; LAUNDERING; FLEXIBLE MATERIALS NOT OTHERWISE PROVIDED FOR
- D06F—LAUNDERING, DRYING, IRONING, PRESSING OR FOLDING TEXTILE ARTICLES
- D06F73/00—Apparatus for smoothing or removing creases from garments or other textile articles by formers, cores, stretchers, or internal frames, with the application of heat or steam
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39469—Grip flexible, deformable plate, object and manipulate it
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/39—Robotics, robotics to robotics hand
- G05B2219/39571—Grip, grasp non rigid material, piece of cloth
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40011—Lay down, laying non rigid material, handle flat textile material
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40044—Unfold flexible material
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49998—Work holding
Definitions
- the present invention relates to a deformable thin object deploying apparatus and a deformable thin object deploying method for deploying a deformable thin object such as clothing.
- This Patent Document 1 includes a first clamp for gripping a corner of a fabric, a fabric spreading clamp for spreading the fabric held by the first clamp, and another corner of the fabric spread by the fabric spreading clamp.
- a deployment device comprising a second clamp for gripping is disclosed.
- the unfolding device disclosed in Patent Document 1 brings the fabric spreading clamp close to the fabric whose corners are gripped by the first clamp, and the fabric spreading clamp is brought into a suction state, thereby bringing the fabric into the suction state. spread. And, by gripping the other corners exposed by spreading the fabric with the second clamp, the corners and other corners adjacent to the longitudinal direction of the fabric are gripped by the first clamp and the second clamp, respectively. The fabric is unfolded.
- the deployment device disclosed in Patent Document 1 it is necessary to use a fabric spreading clamp having a suction function in order to spread the fabric, and the configuration of the deployment device is complicated.
- An object of the present invention is to provide a deformable thin object developing device capable of developing a deformable thin object with a simple configuration.
- a deformable thin object deployment device is a deformable thin object deployment device that deploys a deformable thin object, and includes a gripping unit, a moving mechanism, an end point detection unit, and a control unit.
- the gripping part grips the deformable thin object.
- the moving mechanism moves the grip portion.
- the end point detection unit detects “an end point of the deformable thin object furthest from the first reference line or the first reference point” or “an end point of the deformable thin object closest to the second reference line or the second reference point”.
- the first reference line, the first reference point, the second reference line, and the second reference point may be fixed or may be changed every time the end point is detected.
- a control part performs 1st control, 2nd control, 3rd control, 4th control, 5th control, 6th control, and 7th control.
- the control unit controls the grip unit and the moving mechanism so that the grip unit grips the deformable thin object at the first point.
- the second control is executed after the first control.
- the control unit causes the end point detection unit to detect the end point.
- the third control is executed after the second control.
- the control unit controls the gripping unit and the moving mechanism so that the gripping unit grips the deformable thin object at the end point detected in the second control (hereinafter referred to as “first end point”).
- the fourth control is executed after the third control.
- the control unit causes the end point detection unit to detect the end point.
- the fifth control is executed after the fourth control.
- the control unit holds the deformable thin object so that the holding unit holds the deformable thin object at both the “first end point” and the “end point detected in the fourth control (hereinafter referred to as“ second end point ”).
- control the moving mechanism The sixth control is executed after the fifth control.
- the control unit causes the end point detection unit to detect the end point.
- the seventh control is executed after the sixth control.
- the gripping portion grips the deformable thin object at both the “first end point or the second end point” and the “end point detected in the sixth control (hereinafter referred to as“ third end point ”)”.
- the control unit controls the gripping unit and the moving mechanism.
- the “deformable thin object” includes, for example, cloth such as clothing and towels, film, paper, and sheet.
- the shape of the deformable thin object is not particularly limited, but may be a rectangle such as towels, or may be a substantially rectangle such as a T-shirt or a running shirt.
- the “gripping part” may be configured to be able to grip a deformable thin object.
- the gripping part has a pair of fingers, and the pair of fingers are configured to be close to or away from each other.
- Examples of the “moving mechanism” include a belt slider mechanism, a ball screw mechanism, an air cylinder mechanism, a motor cylinder mechanism, an electric slider mechanism, a linear slider mechanism, and a rack and pinion mechanism.
- the belt slider mechanism is a slide movement mechanism that uses a motor as a drive source, a belt or a wire as a feed member, and an LM guide material or the like as a guide member, and transmits the rotation of the motor to the belt or the wire to move the moving object.
- This is a mechanism for sliding along a guide member such as an LM guide material.
- the ball screw mechanism is a slide moving mechanism that uses a motor as a drive source, a ball screw or a trapezoidal screw as a feed member, and an LM guide material or the like as a guide member, and moves by transmitting the rotation of the motor to the ball screw or the trapezoidal screw.
- the air cylinder mechanism is a slide movement mechanism that uses an air compressor as a drive source and a piston rod as a feed member and a guide member, and uses a direct movement of the piston rod to move a moving object attached to the piston rod. It is a mechanism for sliding.
- the motor cylinder mechanism is a slide moving mechanism that uses a motor as a drive source and a piston rod as a feed member and a guide member, and transmits the rotation of the motor to a ball screw to slide a moving object attached to the piston rod. It is a mechanism to make.
- the electric slider mechanism is a slide moving mechanism that uses a motor as a drive source, a ball screw or the like as a feed member, and an LM guide material or the like as a guide member, and transmits the rotation of the motor to the ball screw to move the moving object to the LM. It is a mechanism for sliding along a guide member such as a guide material.
- the linear slider mechanism is a slide moving mechanism that uses a magnet as a drive source, the same feed member as a magnet, and an LM guide material or the like as a guide member. The linear slider mechanism slides and moves a moving object using the principle of a linear motor. It is a mechanism to make.
- the rack and pinion mechanism is a slide moving mechanism that uses a motor as a drive source, uses the rack and pinion as a feed member, and uses an LM guide material or the like as a guide member, and rotates the pinion by the rotation of the motor and is attached to the rack.
- This is a mechanism for sliding the moving object along a guide member such as an LM guide material.
- the “end point detection unit” may detect an end point of the deformable thin object by analyzing an image of the deformable thin object captured by an imaging unit such as a camera, or may be a sensor (for example, an optical sensor or the like).
- the rear end By detecting the rear end of the deformable thin object in the moving direction, the rear end may be used as the end point of the deformable thin object. Further, the “end point detection unit” may be composed of a plurality of devices or may be a single device.
- the gripping part grips the first point of the deformable thin object. Thereby, the first end point farthest from the first point of the deformable thin object can be detected.
- the gripping part grips the first end point of the deformable thin object. Thereby, the corner
- the gripping part grips both the first end point and the second end point of the deformable thin object.
- the corner portion arranged at the diagonal position of the corner portion is gripped by the grip portion.
- the gripping part grips the “first end point or the second end point” and the “third end point” of the deformable thin object.
- two adjacent corners of the deformable thin object are gripped by the gripping portion, and the deformable thin object in a messy state is developed.
- the deformable thin object deployment device when both the first end point and the second end point of the deformable thin object are gripped, it is possible to detect the third end point and grip the third end point. .
- the third end point can be detected and the third end point can be gripped without using a suction device or the like that spreads the deformable thin object. Therefore, the deformable thin object deployment device can deploy the deformable thin object with a simple configuration.
- control unit further performs the eighth control after the fifth control and before the sixth control.
- the control unit controls the moving mechanism so that the straight line connecting the first end point and the second end point is substantially horizontal.
- the first end point and the second end point are held by the holding unit.
- the third endpoint is easily detected by the endpoint detector in the sixth control.
- the control unit causes the end point detection unit to detect the first end point farthest from the first point in the second control, and the end point in the fourth control.
- the detection unit is caused to detect the second end point farthest from the first end point
- the end point detection unit is caused to detect the third end point farthest from the straight line connecting the first end point and the second end point.
- the end point detection unit detects the first end point farthest from the first point during the second control, and the end point detection unit detects the first end point during the fourth control.
- the second end point farthest from the first end point is detected, and during the sixth control, the end point detection unit detects the third end point farthest from the straight line connecting the first end point and the second end point.
- the first reference line is fixed.
- the first reference line is set on the far side of the endpoint appearance area.
- the first reference line is set above the end point appearance region.
- the first reference line may be physically provided in the placement area and the suspension member, or may be provided as data on an image of the image device that constitutes the end point detection unit.
- control unit causes the end point detection unit to detect the first end point farthest from the first reference line in the second control, and in the fourth control, to the end point detection unit, The second end point farthest from the first reference line is detected, and in the sixth control, the end point detection unit is caused to detect the third end point farthest from the first reference line.
- the end point detection unit detects the first end point farthest from the first reference line during the second control, and the end point detection unit performs the first control during the fourth control.
- the second end point farthest from the reference line is detected, and during the sixth control, the end point detection unit detects the third end point farthest from the first reference line.
- the second reference line is fixed.
- the second reference line is set on the near side of the endpoint appearance area.
- the first reference line is installed below the end point appearance region.
- the second reference line may be physically provided in the placement area and the suspension member, or may be provided as data on an image of the image device that constitutes the end point detection unit.
- control unit causes the end point detection unit to detect the first end point closest to the second reference line in the second control, and in the fourth control, to the end point detection unit, The second end point closest to the second reference line is detected, and in the sixth control, the end point detection unit is caused to detect the third end point closest to the second reference line.
- the end point detection unit detects the first end point closest to the second reference line during the second control, and the end point detection unit performs the second control during the fourth control.
- the second end point closest to the reference line is detected, and during the sixth control, the end point detection unit detects the third end point closest to the second reference line.
- control unit further performs the ninth control after the seventh control.
- control is performed so that the gripping portion grips the deformable thin object at both “the end point of the first end point and the second end point that is not gripped in the seventh control” and the “third end point”.
- the part controls the gripping part and the moving mechanism.
- this deformable thin object deployment device if the development of the deformable thin object is not completed even if the control unit performs the control from the first control to the seventh control, a combination of end points different from the end points gripped by the grip unit in the seventh control
- the gripping part grips the deformable thin object. That is, the deformable thin object can be developed by changing to an end point different from the end point gripped by the grip portion in the seventh control.
- the gripping part grips the deformable thin object with a combination of end points different from the end points gripped in the seventh control, so that the deformable thin object is repeatedly gripped at the same end point. Can be prevented. As a result, it is possible to suppress an increase in the number of times of gripping by the gripping part until the development of the deformable thin object is completed, and the development time of the deformable thin object is shortened.
- the control unit in the seventh control “the end point far from the third end point among the first end point and the second end point” and the “first end point”
- the grip portion and the moving mechanism are controlled so that the grip portion grips the deformable thin object both at the “three end points”.
- the gripping part grips the third end point
- the gripping part gripping the first end point or the second end point far from the third end point does not move but is close to the third end point.
- the gripper that grips the first end point or the second end point of the other side moves so as to grip the third end point. That is, it is possible to shorten the moving distance of the grip portion that goes to grip the third end point. For this reason, the development time of a deformable thin object is shortened.
- the deformable thin object deployment device further includes a placement area for placing the deformable thin object.
- the control part is the deformable thin object grasped by the grasping part between the first control and the second control, between the third control and the fourth control, and between the fifth control and the sixth control.
- the gripping unit and the moving mechanism are controlled so as to move while abutting on the placement area.
- control unit controls the gripping unit and the moving mechanism so that the folding object gripped at the first point moves while contacting the placement region after the first control.
- the second movement control for controlling the gripping portion and the moving mechanism so that the folding object gripped at the first end point moves while contacting the placement area.
- the third movement control is performed to control the gripping part and the moving mechanism so that the folding object gripped at both the first end point and the second end point moves while being in contact with the placement area.
- the deformable thin object moves while abutting against the placement region, and thus a frictional force in the direction opposite to the moving direction is generated on the deformable thin object.
- the deformable thin object deployment device may be able to eliminate the twist and entanglement of the deformable thin object.
- the end point detection unit can detect the rear end in the movement direction of the gripping portion which is the end point (first end point, second end point, and third end point) of the deformable thin object.
- the work can be performed with the deformable thin object placed in the placement area.
- the gripping part that grips the first end point when the gripping part grips the third end point in the seventh control and Any of the gripping parts that grip the second end point can be used as a gripping part that grips the third end point. That is, it is not necessary for the gripping portion to grip the three points of the first end point, the second end point, and the third end point at the same time, as long as it can grip the two points simultaneously. For this reason, it is possible to prevent the number of gripping portions from increasing. As a result, the configuration of the gripping part is simplified.
- the deformable thin object deployment device further includes a first feature portion detector and a second feature portion detector.
- the first feature portion detection unit detects a first feature portion of the deformable thin object.
- the second feature portion detection unit detects a second feature portion of the deformable thin object.
- the control unit detects the first feature portion of the deformable thin object by the first feature portion detection unit, and detects the second feature portion of the deformable thin object by the second feature portion detection unit. If so, the tenth control is further performed. In the tenth control, the control unit controls the gripping unit and the moving mechanism so that the gripping unit grips the position based on the second characteristic portion.
- first characteristic portion is, for example, a substantially rectangular shape of the outer shape of a T-shirt or a running shirt, or a corner shape of a hem portion.
- the “second characteristic portion” is, for example, a collar portion in the case of a T-shirt or a running shirt.
- the gripper grips the position with respect to the second feature portion, so that a plurality of deformable thin objects are aligned at the position with reference to the second feature portion.
- the first feature part and the second feature part can be detected in a state where the deformable thin object is placed in the placement region. For this reason, compared with the case where a deformable thin object is suspended, it will be in the stable state by mounting a deformable thin object on a mounting base. As a result, the recognition rate of the first feature portion and the second feature portion is improved as compared with the case where the first feature portion and the second feature portion are detected while the deformable thin object is suspended.
- the control unit detects the first feature part of the deformable thin object by the first feature part detection unit, and the second feature part detection unit. If the second characteristic portion of the deformable thin object is not detected, the eleventh control is further performed. In the eleventh control, the control unit controls the gripping unit and the moving mechanism so that the deformable thin object is turned over.
- the deformable thin object can be turned over to expose the second characteristic portion.
- deployment apparatus it becomes possible to hold
- the second feature portion detection unit includes an infrared camera capable of specifying the position of the second feature portion of the deformable thin object.
- the position of the second characteristic portion of the deformable thin object can be specified by the infrared camera even when the deformable thin object is facing down. For this reason, even if the control unit does not perform control to turn the deformable thin object upside down with respect to the gripping unit and the moving mechanism in order to expose the second characteristic portion of the deformable thin object, the gripping unit is not limited to the second deformable thin object. A position relative to the feature portion can be grasped.
- the control unit further performs a twelfth control, a thirteenth control, a fourteenth control, a fifteenth control, a sixteenth control, a seventeenth control, and an eighteenth control. .
- the twelfth control is performed when the second feature portion is not detected by the second feature portion detector after the eleventh control.
- the control unit moves the gripping unit so that the lower end of the deformable thin object gripped by both the “first end point or the second end point” and the “third end point” is in contact with the placement region. And control the moving mechanism.
- the thirteenth control is executed after the twelfth control.
- a control part makes an end point detection part detect an end point.
- the fourteenth control is executed after the thirteenth control.
- the control unit controls the gripping unit and the moving mechanism so that the gripping unit grips the deformable thin object at the end point detected in the thirteenth control (hereinafter referred to as “fourth end point”).
- the fifteenth control is executed after the fourteenth control.
- the control unit causes the end point detection unit to detect the end point.
- the sixteenth control is executed after the fifteenth control.
- the control unit holds the gripping part so that the gripping part grips the deformable thin object at both the “fourth end point” and “the end point detected in the fifteenth control (hereinafter referred to as“ fifth end point ”). And control the moving mechanism.
- the seventeenth control is executed after the sixteenth control.
- the control unit causes the end point detection unit to detect the end point.
- the eighteenth control is executed after the seventeenth control.
- the gripping part grips the deformable thin object at both the “fourth end point or the fifth end point” and the “end point detected in the seventeenth control (hereinafter referred to as the“ sixth end point ”).
- the control unit controls the gripping unit and the moving mechanism.
- the second feature part detection unit detects the second feature part of the deformable thin object.
- the deformable thin object deploying device deploys the deformable thin object. Specifically, after the eleventh control, when the second feature portion detector cannot detect the second feature portion of the deformable thin object, first, the grip portion first sets the “first end point or second end point” and “third point”. The gripping portion is lowered until the lower end of the deformable thin object gripped at both the “end points” comes into contact with the placement region.
- a portion where the shape of the deformable thin object is difficult to collapse (for example, a portion where a seam such as a shoulder of a running shirt is present) can be detected as the fourth end point.
- the gripping part grips the fourth end point of the deformable thin object.
- angular part (part where a shape does not collapse easily) of a deformable thin object is gripped by the holding part.
- the gripping part grips both the fourth end point and the fifth end point of the deformable thin object.
- the corners arranged at the diagonal positions of the corners are gripped by the gripping part.
- the gripping part grips the “fourth end point or the fifth end point” and the “sixth end point” of the deformable thin object.
- two adjacent corner portions (parts whose shape is difficult to collapse) of the deformable thin object are gripped by the gripping portion, and the deformable thin objects arranged randomly are developed.
- the deformable thin object deployment device further includes a suspension member.
- the suspension member may be a single or a plurality of horizontally extending plates, or may be a single or a plurality of horizontally extending rods.
- a deformable thin object is suspended from the suspension member.
- the control unit removes the deformable thin object gripped by the gripping unit between the first control and the second control, between the third control and the fourth control, and between the fifth control and the sixth control.
- the grip portion and the moving mechanism are controlled so as to be hung on the suspension member.
- the end point is detected by the end point detection unit while the deformable thin object is suspended by the suspension member.
- wrinkles of the deformable thin object are extended by gravity during end point detection, and a problem such as a part of the deformable thin object being caught in the deformable thin object and curling is reduced. can do. Therefore, in this deformable thin object developing device, the detection accuracy of the end point detection by the end point detection unit can be improved.
- the deformable thin object deployment device should be at least smaller in size in the width direction and the depth direction than the above-described “deformable thin object deployment device that detects end points by placing a deformable thin object on the placement area”. Can do.
- the deformable thin object deployment device further includes a first member and a lowering mechanism.
- the lowering mechanism lowers the first member.
- the control unit has a first position in the space between the gripping part and the suspension member from above the deformable thin object with respect to the lowering mechanism with the deformable thin object held on the suspension member while being gripped by the gripping part. Lower the member.
- the control unit is configured so that the gripping part and the suspension member are engaged with the descent mechanism from above the deformable thin object with the deformable thin object being applied to the suspension member while being gripped by the gripping part.
- the first member is lowered into the space between them, the portion of the deformable thin object located between the grip portion and the suspension member is pushed down, and as a result, the end point of the deformable thin object located outside the suspension member is pulled up. .
- the end point of the deformable thin object can be within the detection range of the end point detection unit. Therefore, in this deformable thin object deployment device, even if the deformable thin object is relatively large, the end point can be detected in a relatively compact space. Therefore, the downsizing of the deformable thin object developing device can be realized.
- the suspension member has a first suspension part and a second suspension part.
- the second suspension part is provided apart from the first suspension part.
- the deformable thin object deployment device further includes a lowering device.
- the lowering device has a first member and a lowering mechanism. The lowering mechanism lowers the first member from above the first suspension part and the second suspension part to a space between the first suspension part and the second suspension part.
- this deformable thin object deployment device when the first member is lowered by the lowering mechanism while the deformable thin object is suspended across the first suspension part and the second suspension part by the gripping part and the moving mechanism, The part of the deformable thin object located between the suspension part and the second suspension part is pushed down, and as a result, the end points of the deformable thin object located outside the first suspension part and the second suspension part are pulled up. For this reason, in this deformable thin object deployment device, even if the deformable thin object is relatively large, the end point of the deformable thin object can be within the detection range of the end point detection unit. Therefore, in this deformable thin object deployment device, even if the deformable thin object is relatively large, the end point can be detected in a relatively compact space. Therefore, the downsizing of the deformable thin object developing device can be realized.
- the deformable thin object deployment device according to any one of the above (13) to (15) further includes a first feature portion detector and a second feature portion detector.
- a first feature portion detector and a second feature portion detector it is preferable that two sets of the first feature portion detector and the second feature portion detector are prepared.
- the first feature portion detector and the second feature portion detector are installed to face each other with the suspension member interposed therebetween. Is preferred.
- the first feature portion detection unit detects a first feature portion of the deformable thin object.
- the second feature portion detection unit detects a second feature portion of the deformable thin object.
- the control unit detects the first feature portion of the deformable thin object by the first feature portion detection unit, and detects the second feature portion of the deformable thin object by the second feature portion detection unit. If so, the nineteenth control is further performed. In the nineteenth control, the control unit controls the gripping unit and the moving mechanism so that the gripping unit grips the position based on the second feature portion.
- first characteristic portion is, for example, a substantially rectangular shape of the outer shape of a T-shirt or a running shirt, or a corner shape of a hem portion.
- the “second characteristic portion” is, for example, a collar portion in the case of a T-shirt or a running shirt.
- the gripper grips the position with respect to the second feature portion, so that a plurality of deformable thin objects are aligned at the position with reference to the second feature portion.
- the first feature part and the second feature part can be detected in a state where the deformable thin object is suspended from the suspension member. For this reason, in this deformable thin object deployment device, the wrinkles of the deformable thin object are extended by gravity during the first feature portion detection and the second feature portion detection. Therefore, in this deformable thin object developing device, it is possible to improve the detection accuracy of the first feature portion detection by the first feature portion detector and the second feature portion detection by the second feature portion detector.
- this deformable thin object deployment device in order to suspend the deformable thin object on the suspension member, by installing the first feature portion detection unit and the second feature portion detection unit so as to face each other with the suspension member interposed therebetween, The first feature portion detection and the second feature portion detection can be performed simultaneously from both sides. Therefore, in this deformable thin object deployment device, the first feature part detection and the second feature are compared with those in which the deformable thin object is placed on the placement region and the first feature part detection and the second feature part detection are performed. Partial detection can be performed in a shorter time.
- first feature part detection unit and the second feature part detection unit are arranged on one side of the suspension member, and a mirror is arranged on the opposite side and at a predetermined position to display an image of the deformable thin object on the opposite side.
- a mirror is arranged on the opposite side and at a predetermined position to display an image of the deformable thin object on the opposite side.
- the first feature part detection and the second feature are compared with those in which the deformable thin object is placed on the placement region and the first feature part detection and the second feature part detection are performed. Partial detection can be performed in a shorter time.
- a deformable thin object deployment method is a deformable thin object deployment method for deploying a deformable thin object, and includes an eleventh gripping step, an eleventh end point detection step, a twelfth gripping step, and a twelfth end point detection.
- the deformable thin object is gripped at the eleventh point.
- the eleventh end point detection step after the first gripping step, “the end point of the deformable thin object furthest from the eleventh reference line or the eleventh reference point” or “the deformable thin object closest to the twelfth reference line or the twelfth reference point” An “end point” is detected.
- the twelfth gripping step after the eleventh end point detection step, the deformable thin object is gripped by the end points detected in the eleventh end point detection step (hereinafter referred to as “eleventh end point”).
- the deformable thin object is gripped by both the “11th end point” and the “endpoint detected in the twelfth end point detection step (hereinafter referred to as“ the twelfth end point ”)” after the twelfth end point detection step.
- the thirteenth end point detection step after the thirteenth gripping step, “the end point of the deformable thin object furthest from the fifteenth reference line or the fifteenth reference point” or “the deformable thin object closest to the sixteenth reference line or the sixteenth reference point” An “end point” is detected.
- both the “11th end point or the twelfth end point” and the “end point detected in the thirteenth end point detecting step hereinafter referred to as“ the thirteenth end point ”)” are deformable.
- a thin object is gripped.
- the eleventh reference line, the thirteenth reference line, and the fifteenth reference line may be the same or different.
- the eleventh reference point, the thirteenth reference point, and the fifteenth reference point may be the same or different.
- the twelfth reference line, the fourteenth reference line, and the sixteenth reference line may be the same or different.
- the twelfth reference point, the fourteenth reference point, and the sixteenth reference point may be the same or different.
- the eleventh point of the deformable thin object is gripped in the eleventh gripping step.
- the eleventh end point detecting step the eleventh end point farthest from the eleventh point of the deformable thin object can be detected.
- the eleventh end point of the deformable thin object is gripped.
- angular part of a deformable thin object is hold
- the eleventh end point of the deformable thin object the twelfth end point farthest from the eleventh end point of the deformable thin object can be detected in the twelfth end point detecting step.
- both the eleventh end point and the twelfth end point of the deformable thin object are gripped.
- the corner portion disposed at the diagonal position of the corner portion is gripped.
- the thirteenth end point farthest from the straight line connecting the eleventh end point and the twelfth end point is detected in the thirteenth end point detection step. It becomes possible.
- the “eleventh end point or the twelfth end point” and the “13th end point” of the deformable thin object are gripped.
- deployment method is performed by the above-mentioned deformable thin object expansion
- the “deformable thin object” includes, for example, cloth such as clothing and towels, film, paper, and sheet.
- the shape of the deformable thin object is not particularly limited, but may be a rectangle such as towels, or may be a substantially rectangle such as a T-shirt or a running shirt.
- FIG. It is the block diagram which showed the whole structure of the folding object processing apparatus which concerns on one Embodiment of this invention.
- FIG. It is a perspective view of the folding object processing apparatus shown in FIG. It is a front view of the folding object processing apparatus shown in FIG. It is a front view of the chuck
- FIG. It is a rear view of the folding object processing apparatus shown in FIG. It is a side view of the folding object processing apparatus shown in FIG. It is a top view of the folding object processing apparatus shown in FIG. It is a top view of the folding apparatus of the to-be-folded object processing apparatus shown in FIG. It is a front view of the folding apparatus of the folding object processing apparatus shown in FIG.
- FIG. 1 It is a functional block diagram of the control part of the folding object processing apparatus shown in FIG. It is the flowchart which showed the expansion
- 1 folding object processing apparatus 200 mounting table (mounting area) 300 Unfolding device 310 Grasping part 320 Moving mechanism 401 Digital still camera 600 Control part 601 First endpoint detection part 602 Second endpoint detection part 603 Third endpoint detection part 604 Fourth endpoint detection part 605 Fifth endpoint detection part 606 Sixth endpoint Detection unit 607 Rectangular detection unit (first feature portion detection unit) 608 Collar detection unit (second feature portion detection unit) 609 Moving mechanism control unit (control unit) 610 Grasping part control part (control part) 700 Suspension member 710 Lift bar TS T-shirt (deformable thin object) RS running shirt (deformable thin) S1 First grasping step S3 First end point detecting step S4 Second grasping step S6 Second end point detecting step S7 Third grasping step S9 Third end point detecting step S10 Fourth grasping step
- the folding object processing apparatus 1 expands a folding object placed on the mounting table 200 in a random manner, and the expanded folding object.
- the folding apparatus mainly includes a frame 100, a mounting table 200, a developing device 300, two digital still cameras 401, a folding device 500, a developing device 300, and a computer 600.
- the unfolding apparatus 300 unfolds the folding object that is placed randomly on the mounting table 200.
- the digital still camera 401 is disposed on the upper part of the frame 100.
- the folding device 500 folds the folding object unfolded by the unfolding device 300.
- the computer 600 is communicably connected to the deployment device 300, the digital still camera 401, and the folding device 500.
- the folding object is, for example, a cloth such as clothing and towels, a film, paper, a sheet, and the like, and the shape may be rectangular like a towel, or a T-shirt or a running shirt.
- a substantially rectangular shape such as
- the frame 100 is formed in a substantially rectangular parallelepiped frame shape. And the mounting base 200 is provided in the lower part.
- a crosspiece 101 is provided on the upper portion of the frame 100 along the width direction (arrow X direction).
- the two digital still cameras 401 which make the mounting base 200 an imaging range are attached to the crosspiece 101.
- crosspieces 102R and 102L are provided in the vicinity of one end side (arrow X1 direction side) and the other end side (arrow X2 direction side) of the mounting table 200 along the front-rear direction (arrow Y direction). Yes.
- LM guide materials 379R and 379L which will be described later, are attached to their upper surfaces.
- a folding device fixing frame 103 for fixing the folding device 500 at a predetermined height position is provided behind the frame 100.
- the mounting table 200 is provided for mounting a folding object. As shown in FIG. 2, the mounting table 200 has a horizontal plane extending in the XY plane (horizontal plane). The folding object is placed on the placing table 200 in a messy state. And the folding object mounted on the mounting base 200 is expand
- the unfolding device 300 is a device that unfolds a folding object that is randomly placed on the placing table 200, and includes a gripping portion 310 and a moving mechanism 320.
- the grip part 310 grips a folding object.
- the moving mechanism 320 moves the grip part 310.
- the deployment device 300 is connected to a computer 600 (to be described later) so as to be communicable by wire or wirelessly.
- the computer 600 controls the operations of the grip portion 310 and the moving mechanism 320.
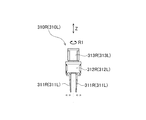
- the grip portion 310 includes a right chuck portion 310R and a left chuck portion 310L.
- the right chuck portion 310R has a pair of fingers 311R, a linear actuator 312R, and a rotary actuator 313R.
- the pair of fingers 311R plays a role of gripping the folding object.
- the linear actuator 312R brings the distance between the pair of fingers 311R close to or away from each other.
- the rotary actuator 313R rotates the linear actuator 312R in the arrow R1 direction with the vertical direction (arrow Z direction) as the rotation axis.
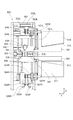
- the movement mechanism 320 includes a proximity / separation mechanism 330, a rotation movement mechanism 340, a width direction movement mechanism 350, an up / down direction movement mechanism 360, and a front / rear direction movement mechanism 370.
- the proximity / separation mechanism 330 brings the right chuck portion 310R and the left chuck portion 310L closer to or away from each other.
- the rotational movement mechanism 340 rotates the proximity / separation mechanism 330 about the vertical direction (arrow Z direction) as a rotation axis.
- the width direction moving mechanism 350 moves the rotational movement mechanism 340 in the width direction (arrow X direction).
- the vertical movement mechanism 360 moves the width movement mechanism 350 in the vertical direction (arrow Z direction).
- the front-rear direction moving mechanism 370 moves the up-down direction moving mechanism 360 in the front-rear direction (arrow Y direction).
- the proximity / separation mechanism 330 includes a right chuck portion moving mechanism 330R and a left chuck portion moving mechanism 330L, as shown in FIGS.
- the right chuck portion moving mechanism 330R moves the right chuck portion 310R.
- the left chuck portion moving mechanism 330L moves the left chuck portion 310L.
- the right chuck portion moving mechanism 330R includes a motor 331R, a ball screw 332R, and a nut 333R serving as a drive source.
- the motor 331R is a motor capable of normal rotation and reverse rotation.
- the motor 331R and the ball screw 332R are attached to a rotating plate 342 of a rotational movement mechanism 340 described later.
- the ball screw 332R rotates when the driving force from the motor 331R is transmitted. Further, the ball screw 332R is disposed along the longitudinal direction of the rotating plate 342 (arrow K direction (see FIG. 2)) on the lower surface of the rotating plate 342 described above.
- the nut 333R is screwed into the ball screw 332R. Further, the right chuck portion 310R is fixed to the nut 333R.
- the configuration of the left chuck portion moving mechanism 330L is the same as the configuration of the right chuck portion moving mechanism 330R described above, and therefore, a reference numeral in which “R” is replaced with “L” in the reference numerals of the right chuck portion moving mechanism 330R is used. The description is omitted.
- the right chuck portion moving mechanism 330R moves the right chuck portion 310R in the direction of the rotation axis of the ball screw 332R (arrow K direction), and the left chuck portion moving mechanism 330L moves the left chuck portion 310L in the direction of the rotation axis of the ball screw 332L.
- the right chuck portion 310R and the left chuck portion 310L can be brought close to or separated from each other.
- the rotational movement mechanism 340 is provided to rotate the proximity / separation mechanism 330 described above with the vertical direction (arrow Z direction) as a rotation axis.
- the rotational movement mechanism 340 includes a motor 341 and a rotating plate 342 that are driving sources.
- the motor 341 is a motor capable of normal rotation and reverse rotation.
- the motor 341 is mounted on a slide plate 354 of a width direction moving mechanism 350 described later.
- the rotating plate 342 is attached to the drive shaft of the motor 341.
- the proximity / separation mechanism 330 (motors 331R and 331L, ball screws 332R and 332L) is attached to the rotating plate 342.
- the rotating plate 342 attached to the drive shaft of the motor 341 rotates in the arrow R2 direction with the vertical direction (arrow Z direction) as the rotation axis.
- the proximity / separation mechanism 330 provided on the rotating plate 342 rotates in the direction of the arrow R2.
- the width direction moving mechanism 350 is provided to move the above-described rotation moving mechanism 340 in the width direction (arrow X direction).
- the width direction moving mechanism 350 includes a motor 351 that serves as a drive source, a ball screw 352, a nut 353, and a slide plate 354.
- the motor 351 is a motor capable of normal rotation and reverse rotation.
- the motor 351 is attached to a vertical movement plate 361 of a vertical movement mechanism 360 described later.
- the ball screw 352 rotates when the driving force from the motor 351 is transmitted.
- the ball screw 352 is arranged along the longitudinal direction (arrow X direction) of the vertical movement plate 361 on the upper surface of the vertical movement plate 361 (see FIG. 2).
- the nut 353 is screwed into the ball screw 352.
- the motor 341 of the rotational movement mechanism 340 described above is placed.
- the slide plate 354 is fixed to the nut 353.
- the vertical movement mechanism 360 is provided to move the above-mentioned width direction movement mechanism 350 in the vertical direction (arrow Z direction).
- the vertical movement plate 361, the right lifting unit 362R, A left lifting unit 362L is provided.
- the vertical movement plate 361 is provided with the width direction moving mechanism 350 described above.
- the right elevating unit 362R is disposed on one end side (arrow X1 direction side) of the vertical movement plate 361.
- the left lifting unit 362L is disposed on the other end side (arrow X2 direction side) of the vertical movement plate 361.
- the right elevating unit 362R and the left elevating unit 362L are both fixed to a frame body 371 of a longitudinal movement mechanism 370 described later. As shown in FIGS.
- the right elevating unit 362R includes a motor 363R, a driving pulley 364R, a driven pulley 365R, a belt 366R, a ball screw 367R, and a nut 368R (see FIG. 6) as a driving source.
- the motor 363R is a motor capable of normal rotation and reverse rotation.
- the motor 363R is fixed to an upper portion of a frame body 371 of a back-and-forth movement mechanism 370 described later.
- the drive pulley 364R is attached to the drive shaft of the motor 363R.
- the driven pulley 365R is disposed at a predetermined interval from the driving pulley 364R.
- the belt 366R is stretched over the driving pulley 364R and the driven pulley 365R.
- the ball screw 367R is attached to the rotation shaft of the driven pulley 365R. Further, the ball screw 367R is disposed along the vertical direction (arrow Z direction).
- the ball screw 367R is screwed with a nut 368R that moves in the vertical direction (arrow Z direction) as the ball screw 367R rotates.
- the nut 368R is screwed into the ball screw 367R. Further, the above-described vertical movement plate 361 is fixed to the nut 368R.
- the configuration of the left elevating unit 362L is the same as the configuration of the right elevating unit 362R described above. Therefore, the description of the right elevating unit 362R is omitted by using the reference numeral in which “R” is replaced with “L”. To do.
- the nut 368R (the nut of the left elevating unit 362L is not shown) that is screwed into the ball screws 367R and 367L moves in the rotation axis direction (arrow Z direction) of the ball screws 367R and 367L, so that the nut 368R is attached.
- the vertical movement plate 361 moves in the rotation axis direction (arrow Z direction).
- the width direction moving mechanism 350 provided on the vertical movement plate 361 moves along the vertical direction (arrow Z direction).
- the front-rear direction moving mechanism 370 is provided to move the above-described up-down direction moving mechanism 360 in the front-rear direction (arrow Y direction).
- the front / rear direction moving mechanism 370 includes a frame body 371, a right front / rear unit 372 ⁇ / b> R, a left front / rear unit 372 ⁇ / b> L, a motor 373 (see FIG. 3), a drive pulley 374 and a belt 375. have.
- the frame body 371 is provided with the above-described vertical movement mechanism 360.
- the motor 373 is a motor capable of normal rotation and reverse rotation, and is attached to the frame 100.
- the motor 373 (see FIG.
- the right front / rear unit 372R is disposed below one end side (arrow X1 direction side) of the frame body 371.
- the left front / rear unit 372L is disposed below the other end side (arrow X2 direction side) of the frame body 371.
- the drive pulley 374 is attached to the drive shaft of the motor 373.
- the belt 375 is stretched over a driving pulley 374 and a front driven pulley 376R of a right front / rear unit 372R described later.
- the right front / rear unit 372R includes a front driven pulley 376R, a rear driven pulley 377R, a belt 378R, and an LM guide member 379R.
- the front driven pulley 376R is disposed in the vicinity of the drive pulley 374 described above.
- the rear driven pulley 377R is disposed at a predetermined interval from the front driven pulley 376R.
- the belt 378R is stretched over the front driven pulley 376R and the rear driven pulley 377R.
- a frame body 371 is attached to the LM guide member 379R so as to be slidable in the front-rear direction (arrow Y direction).
- the front driven pulley 376R of the right front / rear unit 372R and the front driven pulley 376L of the left front / rear unit 372L are each of a rotating shaft 380 disposed along the width direction (arrow X direction). Attached to one end and the other end, the front driven pulley 376R and the front driven pulley 376L are configured to rotate simultaneously.
- the drive pulley 374 attached to the drive shaft of the motor 373 rotates, and the rotational force is transmitted to the front driven pulley 376R via the belt 375, so that the front driven pulley 376R rotates. .
- the front driven pulley 376R and the front driven pulley 376L attached to the rotating shaft 380 rotate in synchronization.
- the rotational force of the front driven pulleys 376R and 376L is transmitted to the rear driven pulleys 377R and 377L via the belts 378R and 378L, and the rear driven pulleys 377R and 377L rotate.
- the frame body 371 attached to the belts 378R and 378L moves along the LM guide members 379R and 379L.
- the vertical movement mechanism 360 provided in the frame body 371 moves along the front-rear direction (arrow Y direction).
- the digital still camera 401 includes a first point P (see FIG. 12 (b)), a first end point P1 (see FIG. 13 (e)), a second end point P2 (see FIG. 14 (i)), The third end point P3 (see FIG. 16 (m)), the fourth end point P4 (see FIG. 25 (o)), the fifth end point P5 (see FIG. 26 (r)) and the sixth end point P6 (see FIG. 27 (u)). ) Is provided. Specifically, the digital still camera 401 acquires the imaging data of the folding object by imaging the folding object placed on the mounting table 200, and transmits the acquired imaging data to the computer 600. . The computer 600 performs image processing based on the received imaging data, and detects the first point P and the first end point P1 to the sixth end point P6 of the folding object.
- the above-mentioned first point P of the folding object is the center position of the folding object placed on the mounting table 200 (see FIG. 12B). Further, the first end point P1 of the folding object is a position farthest from the first point P of the folding object held at the first position P (see FIG. 13 (e)). Further, the second end point P2 of the folding object is a position farthest from the first end point P1 of the folding object held at the first end point P1 (see FIG. 14 (i)). Further, the third end point P3 of the folding object is a straight line L1 connecting the end points (P1 and P2) related to holding the folding object held at both the first end point P1 and the second end point P2. (See FIG. 16 (m)).
- the fourth end point P4 of the folding object is an end point (P1 or P2) related to the holding of the folding object held at either the first end point P1 or the second end point P2 and the third end point P3. And P3)) is the position farthest from the straight line L2 (see FIG. 25 (o)).
- the fifth end point P5 of the folding object is a position farthest from the fourth end point P4 of the folding object gripped by the fourth end point P4 (see FIG. 26 (r)).
- the sixth end point P6 of the folding object is a straight line L3 connecting the end points (P4 and P5) related to the holding of the folding object held at both the fourth end point P4 and the fifth end point P5. (See FIG. 27 (u)).
- the digital still camera 401 is provided to detect a feature portion (first feature portion) of the folding object. Specifically, the digital still camera 401 detects whether or not the outer shape of the folding object is substantially rectangular in order to detect whether or not the folding object has been unfolded.
- the digital still camera 401 acquires the imaging data of the folding object by imaging the folding object placed on the mounting table 200, and transmits the acquired imaging data to the computer 600.
- the computer 600 performs image processing based on the received imaging data and detects whether or not the folding object has been unfolded by detecting the rectangular outer shape of the folding object.
- the digital still camera 401 is provided for detecting a feature portion (second feature portion) of a folding object that is different from the first feature portion described above. Specifically, the digital still camera 401 is provided to detect a collar portion that is a characteristic portion of a T-shirt or a running shirt. The digital still camera 401 acquires the imaging data of the folding object by imaging the folding object placed on the mounting table 200, and transmits the acquired imaging data to the computer 600. The computer 600 performs image processing based on the received transmission imaging data and detects a collar portion of the folding object.
- the folding device 500 is fixed to the above-described folding device fixing frame 103 of the frame 100.
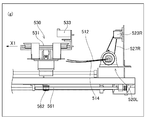
- the folding device 500 mainly includes a pair of mounting plates 501, four sheets.
- the folding plates 511 to 514, the double shaft rotation mechanism 520, the placement plate distance adjustment mechanism 530, the placement plate longitudinal adjustment mechanism 540, the folding plate slide mechanism 550, and the placement plate slide mechanism 560 are configured.
- the folding plate 511 is referred to as a “first folding plate”
- the folding plate 512 is referred to as a “second folding plate”
- the folding plate 513 is referred to as a “third folding plate”.
- ”And the folding plate denoted by reference numeral 514 is referred to as a“ fourth folding plate ”.
- each component of the folding device 500 will be described in detail.
- the mounting plate 501 is a pair of substantially rectangular plate-like members arranged at a predetermined interval in the width direction (arrow X direction), and includes a front-rear direction (arrow Y direction). ). On this mounting plate 501, the folding object unfolded by the unfolding device 300 in the initial state is placed.
- the distance (width) of the pair of placement plates 501 is adjusted by the placement plate distance adjustment mechanism 530.
- the separation distance (width) of the mounting plate 501 is adjusted according to the size of the folding object.
- the position of the mounting plate 501 in the front-rear direction (arrow Y direction) is adjusted by the mounting plate front-rear adjustment mechanism 540.
- the folding plates 511 to 514 are members responsible for folding the folding object placed on the placing plate 501 and have a substantially rectangular shape. In the state, it is arranged outside the mounting plate 501 so as to be orthogonal to the mounting surface of the mounting plate 501.
- the double shaft rotation mechanism 520 includes a right rotation mechanism 520R and a left rotation mechanism 520L.
- the right rotation mechanism 520R rotates the first folding plate 511 and the third folding plate 513.
- the left rotation mechanism 520L rotates the second folding plate 512 and the fourth folding plate 514.
- the right rotation mechanism 520R and the left rotation mechanism 520L are disposed to face each other with the mounting plate 501 interposed therebetween.
- the separation distance (width) between the right rotation mechanism 520R and the left rotation mechanism 520L is adjusted by the folding plate slide mechanism 550.
- the right rotation mechanism 520R mainly includes a double shaft 521R, an intermediate shaft rotation motor 522R, an outer shaft rotation motor 523R, an intermediate shaft pulley 524R, an outer shaft pulley 525R, a first pulley belt 526R, and a second pulley belt 527R.
- the double shaft 521R includes an intermediate shaft 521aR and an outer shaft 521bR.
- the middle shaft 521aR is a cylindrical shaft, and a first folding plate 511 is attached to the tip of the middle shaft 521aR.
- the outer shaft 521bR is a cylindrical shaft, and a third folding plate 513 is attached to the tip of the outer shaft 521bR.
- the middle shaft 521aR is rotatably inserted into the outer shaft 521bR so that a part of the base end side protrudes from the outer shaft 521bR.
- the middle shaft pulley 524R is fitted on the proximal end side of the middle shaft 521aR.
- the outer shaft pulley 525R is fitted on the proximal end side of the outer shaft 521bR.
- the first pulley belt 526R is bridged between a pulley (not shown) attached to the drive shaft of the intermediate shaft rotation motor 522R and the intermediate shaft pulley 524R, and the rotational force of the intermediate shaft rotation motor 522R is applied to the intermediate shaft 521aR. It plays the role of transmitting and rotating the middle shaft 521aR.
- the second pulley belt 527R is stretched between a pulley attached to the drive shaft of the outer shaft rotation motor 523R and the outer shaft pulley 525R, and transmits the rotational force of the outer shaft rotation motor 523R to the outer shaft 521bR to transmit the outer shaft. It plays the role of rotating 521bR.
- the middle shaft rotation motor 522R and the outer shaft rotation motor 523R are motors capable of normal rotation and reverse rotation.
- the configuration of the left rotation mechanism 520L is the same as the configuration of the right rotation mechanism 520R described above. Therefore, the description of the right rotation mechanism 520R is omitted by using the reference numeral in which “R” is replaced with “L”. To do.
- the middle shaft rotation motor 522R and the outer shaft rotation motor 523R of the right side rotation mechanism 520R are arranged on the side of the double shaft 521R as shown in FIG.
- the middle shaft rotation motor 522L and the outer shaft rotation motor 523L are disposed above the double shaft 521L.
- the mounting plate distance adjusting mechanism 530 mainly includes a ball screw 531, two nuts (not shown), an LM guide member 532, and a ball screw driving motor 533.
- the ball screw drive motor 533 serves as a drive source for rotating the ball screw 531.
- the ball screw 531 is composed of a right screw type ball screw part and a left screw type ball screw part.
- the right-handed ball screw part and the left-handed ball screw part are arranged on the same axis.
- the ball screw 531 is arranged so that the rotation axis thereof is parallel to the LM guide member 532 (width direction (arrow X direction)).
- the two nuts are screwed into the right screw type ball screw portion and the left screw type ball screw portion of the ball screw 531, respectively, and slide on the LM guide member 532 along the axial direction of the ball screw 531 by driving the ball screw drive motor 533.
- the ball screw drive motor 533 is a motor capable of normal rotation and reverse rotation.
- the nut is screwed into each of the right-handed ball screw portion and the left-handed ball screw portion of the ball screw 531, so that the two nuts slide in opposite directions. That is, the nuts slide so as to be close to each other or slide so as to be separated from each other.
- a mounting plate 501 is attached to each of the two nuts. For this reason, the mounting plate distance adjusting mechanism 530 can adjust the width of the pair of mounting plates 501.
- the mounting plate longitudinal adjustment mechanism 540 mainly includes a ball screw 541, a nut (not shown), an LM guide member 542, and a ball screw drive motor 543.
- the ball screw drive motor 543 serves as a drive source for rotating the ball screw 541.
- the ball screw 541 is disposed so that its rotation axis is parallel to the LM guide member 542.
- the nut is screwed into the ball screw 541 and slides on the LM guide member 542 along the axial direction (arrow Y direction) of the ball screw 541 by driving the ball screw drive motor 543.
- the ball screw drive motor 543 is a motor capable of normal rotation and reverse rotation.
- the above-mentioned mounting board distance adjustment mechanism 530 is provided in a nut. For this reason, the mounting plate front-rear adjustment mechanism 540 can adjust the position of the mounting plate 501 in the front-rear direction (arrow Y direction).
- the folding plate slide mechanism 550 adjusts the separation distance between the right rotation mechanism 520R and the left rotation mechanism 520L by moving the right rotation mechanism 520R of the double shaft rotation mechanism 520 in the width direction (arrow X direction).
- the folding plate slide mechanism 550 mainly includes a ball screw 551, a nut 552, and a ball screw drive motor (not shown).
- the ball screw 551 is arranged so that its rotation axis is along the width direction (arrow X direction).
- the nut 552 is screwed into the ball screw 551 described above.
- the nut 552 is provided with a right rotation mechanism 520R.
- the ball screw drive motor is a motor capable of normal rotation and reverse rotation. For this reason, the folding plate slide mechanism 550 can adjust the separation distance between the right rotation mechanism 520R and the left rotation mechanism 520L.
- the mounting plate slide mechanism 560 moves the mounting plate 501, the mounting plate distance adjustment mechanism 530, and the mounting plate longitudinal adjustment mechanism 540 (hereinafter referred to as a mounting plate unit) in the width direction (arrow X direction).
- the mounting plate slide mechanism 560 mainly includes a ball screw 561, a nut 562, and a ball screw drive motor (not shown).
- the ball screw 561 is arranged so that its rotation axis is in the width direction (arrow X direction).
- the nut 562 is screwed into the ball screw 561 described above.
- the nut 562 is provided with the mounting plate unit described above.
- the ball screw drive motor is a motor capable of normal rotation and reverse rotation. For this reason, the mounting plate slide mechanism 560 can adjust the separation distance between the mounting plate 501 and the left rotation mechanism 520L.
- the computer 600 supervises control of each part of the folding object processing apparatus 1.
- the computer 600 mainly includes a ROM, a CPU, a RAM, and an input / output interface.
- the ROM stores an operating system, a control program for controlling each part of the folding object processing apparatus 1, and data necessary for executing the control program.
- the CPU is provided to load a control program stored in the ROM into the RAM or to execute it directly from the ROM. That is, the folding object processing apparatus 1 can be controlled by the CPU executing the control program.
- the data processed by the CPU is transmitted to each part of the folding object processing apparatus 1 (the unfolding apparatus 300, the folding apparatus 500, etc.) via the input / output interface, and the data necessary for the processing of the CPU is It is received from each part (digital still camera 401) of the folding object processing apparatus 1 via the input / output interface.
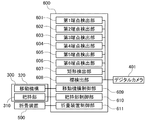
- the computer 600 mainly includes a first endpoint detector 601, a second endpoint detector 602, a third endpoint detector 603, a fourth endpoint detector 604, and a fifth endpoint.
- Detection unit 605, sixth end point detection unit 606, rectangular detection unit (first feature portion detection unit) 607, collar detection unit (second feature portion detection unit) 608, movement mechanism control unit 609, gripping unit control unit 610, and folding A tatami apparatus control unit 611 is provided.
- the first end point detection unit 601 detects the first end point P1 farthest from the first point P of the folding object that the grip unit 310 grips at the first position P.
- the first point P described above is the center position of the folding object placed on the placing table 200.
- the first end point detection unit 601 forms a planar image of the folding object gripped at the first point P based on the imaging data transmitted from the digital still camera 401, and from the planar image
- the first end point P1 farthest from the first point P is detected (see FIG. 13E).
- the second end point detection unit 602 detects the second end point P2 farthest from the first end point P1 of the folding object that the grip unit 310 grips at the first end point P1. Specifically, the second end point detection unit 602 forms a plane image of the object to be gripped at the first end point P1 based on the imaging data transmitted from the digital still camera 401, and from the plane image. A second end point P2 farthest from the first end point P1 is detected (see FIG. 14 (i)).
- the third end point detection unit 603 detects the third end point P3 that is farthest from the straight line L1 that connects the end points related to gripping of the folding object that the grip unit 310 grips at both the first end point P1 and the second end point P2. To do. Specifically, the third end point detection unit 603 is a plane image of the folding object that is gripped at both the first end point P1 and the second end point P2 based on the imaging data transmitted from the digital still camera 401. And the third end point P3 farthest from the straight line L1 is detected from the planar image (see FIG. 16 (m)).
- the fourth end point detection unit 604 is the farthest from the straight line L2 that connects the end points related to gripping the folding object that the gripping unit 310 grips at either the first end point P1 or the second end point P2 and the third end point P3.
- the fourth end point P4 is detected. Specifically, the fourth end point detection unit 604 is grasped at both the first end point P1 and the second end point P2 and the third end point P3 based on the imaging data transmitted from the digital still camera 401. A plane image of the folding object is formed, and a fourth end point P4 farthest from the straight line L2 is detected from the plane image (see FIG. 25 (o)).
- the fifth end point detection unit 605 detects a fifth end point P5 that is farthest from the fourth end point P4 of the folding object that the grip unit 310 grips at the fourth end point P4. Specifically, the fifth end point detection unit 605 forms a plane image of the object to be gripped at the fourth end point P1 based on the imaging data transmitted from the digital still camera 401, and from the plane image. The fifth end point P5 farthest from the fourth end point P4 is detected (see FIG. 26 (r)).
- the sixth end point detection unit 606 detects the sixth end point P6 that is farthest from the straight line L3 that connects the end points related to gripping of the folding object that the gripping unit 310 grips at both the fourth end point P4 and the fifth end point P5. To do. Specifically, the sixth end point detection unit 606 is based on the imaging data transmitted from the digital still camera 401 and is a planar image of the folding object that is gripped at both the fourth end point P4 and the fifth end point P5. And a sixth end point P6 farthest from the straight line L3 is detected from the planar image (see FIG. 27 (u)).
- the first end point detection unit 601 to the sixth end point detection unit 606 described above extract the contour data of the folding object from the created planar image of the folding object, and then based on the contour data, the first end point P1 to A sixth end point P6 is detected.
- the rectangle detector 607 detects whether or not the outer shape of the folding object is rectangular. Specifically, the rectangle detection unit 607 is based on a rectangular pattern stored in a storage unit (not shown) of the computer 600 and a planar image formed based on imaging data transmitted from the digital still camera 401. It is determined whether or not the outer shape of the folding object to be extracted is approximate. And if the rectangle detection part 607 judges that the above-mentioned rectangular pattern and the external shape of a folding object approximate the predetermined level or more, it will judge that the folding object was expand
- a collar detection unit 608 detects a collar portion of the folding object.
- the collar detection unit 608 detects the collar portion of the folding object by performing image recognition using a HOG (Histogram of Oriented Gradients) feature.
- HOG Heistogram of Oriented Gradients
- a gradient Differential image of a planar image created based on imaging data transmitted from the digital still camera 401 is calculated, and the gradient (differential image) is calculated for each local region.
- a histogram is obtained by dividing a section in the gradient direction.
- the movement mechanism control unit 609 controls the operation of the movement mechanism 320 of the deployment device 300. That is, the movement mechanism control unit 609 controls the operations of the proximity / separation mechanism 330, the rotational movement mechanism 340, the width direction movement mechanism 350, the vertical direction movement mechanism 360, and the front / rear direction movement mechanism 370.
- the moving mechanism control unit 609 controls the operation of the proximity / separation mechanism 330
- each of the right chuck unit 310R and the left chuck unit 310L moves along the longitudinal direction (arrow K direction) of the rotating plate 342. Thereby, the distance between the right chuck part 310R and the left chuck part 310L can be adjusted.
- each of the right chuck unit 310R and the left chuck unit 310L is centered on the drive shaft (rotation axis direction: arrow Z direction) of the motor 341. Revolve. Further, the movement mechanism control unit 609 controls the operation of the width direction movement mechanism 350, so that the right chuck portion 310R and the left chuck portion 310L simultaneously move along the width direction (arrow X direction). Further, when the movement mechanism control unit 609 controls the operation of the vertical movement mechanism 360, the right chuck unit 310R and the left chuck unit 310L simultaneously move in the vertical direction (arrow Z direction). Further, the movement mechanism control unit 609 controls the operation of the front-rear direction moving mechanism 370, so that the right chuck unit 310R and the left chuck unit 310L simultaneously move along the front-rear direction (arrow Y direction).
- the gripping unit control unit 610 controls the operations of the right chuck unit 310R and the left chuck unit 310L of the gripping unit 310.
- the gripper control unit 610 controls the driving of the rotary actuators 313R and 313L (see FIG. 4), so that the fingers 311R and 311L each have a drive shaft (rotation axis direction: arrow Z direction) of the rotary actuators 313R and 313L. Rotate to the center. Further, the gripper control unit 610 controls the driving of the linear actuators 312R and 312L, whereby each of the fingers 311R and 311L grips or releases the folding object.
- the gripper control unit 610 and the moving mechanism control unit 609 described above perform first control to eleventh control described below in order to unfold the foldable object placed on the mounting table 200 in a messy state. In this way, the driving of the grip portion 310 and the moving mechanism 320 is controlled. That is, the gripping unit control unit 610 and the moving mechanism control unit 609 control the gripping unit 310 and the moving mechanism 320 so that the gripping unit 310 grips the folding object at the first point P (first control).
- the gripping unit control unit 610 and the moving mechanism control unit 609 control the gripping unit 310 and the moving mechanism 320 so that the gripping unit 310 grips the folding object at the first end point P1 after the first control ( Second control).
- the gripping unit control unit 610 and the movement mechanism control unit 609 are configured so that the gripping unit 310 grips the folding object at both the first end point P1 and the second end point P2.
- the moving mechanism 320 is controlled (third control).
- the gripping unit control unit 610 and the moving mechanism control unit 609 are configured such that the gripping unit 310 is folded at both the first end point P1 and the second end point P2 and the third end point P3.
- the grip unit 310 and the moving mechanism 320 are controlled so as to grip an object (fourth control).
- the gripping unit control unit 610 and the movement mechanism control unit 609 are configured so that the gripping unit 310 and the third end point are either the first end point P1 or the second end point P2 that is not gripped in the fourth control.
- the holding part 310 and the moving mechanism 320 are controlled so as to hold the folding object together with P3 (fifth control).
- the gripping unit control unit 610 and the movement mechanism control unit 609 control the gripping unit 310 and the moving mechanism 320 so that the gripping unit 310 grips a position with reference to the collar portion (second feature portion) (sixth). control).
- the gripping unit control unit 610 and the moving mechanism control unit 609 control the gripping unit 310 and the moving mechanism 320 so that the gripping unit 310 turns over the object to be folded (seventh control).
- the gripping unit control unit 610 and the moving mechanism control unit 609 are configured such that the lower end of the folding object gripped at both the third end point P3 and the first end point P1 and the second end point P2 contacts the mounting table 200.
- the grip portion 310 and the moving mechanism 320 are controlled so as to perform (eighth control).
- the gripping unit control unit 610 and the moving mechanism control unit 609 control the gripping unit 310 and the moving mechanism 320 so that the gripping unit 310 grips the folding object at the fourth end point P4 ( (9th control).
- the gripping unit control unit 610 and the movement mechanism control unit 609 are configured so that the gripping unit 310 grips the folding object at both the fourth end point P4 and the fifth end point P5.
- the moving mechanism 320 is controlled (tenth control).
- the gripping unit control unit 610 and the movement mechanism control unit 609 allow the gripping unit 310 to fold the folding object at both the fourth end point P4 and the fifth end point P5 and the sixth end point P6.
- the grip portion 310 and the moving mechanism 320 are controlled so as to grip (11th control).
- the folding device control unit 611 controls the operation of the folding device 500. That is, the folding device control unit 611 performs operations of the double shaft rotation mechanism 520, the placement plate distance adjustment mechanism 530, the placement plate longitudinal adjustment mechanism 540, the folding plate slide mechanism 550, and the placement plate slide mechanism 560. Control. Specifically, the folding device control unit 611 controls the operation of the double shaft rotation mechanism 520 (right rotation mechanism 520R, left rotation mechanism 520L), whereby the folding plates 511 to 514 are sequentially rotated. Further, when the folding device control unit 611 controls the operation of the mounting plate distance adjustment mechanism 530, the pair of mounting plates 501 move so as to approach or separate from each other.
- the folding device control unit 611 controls the operation of the mounting plate longitudinal adjustment mechanism 540, the pair of mounting plates 501 move along the front-rear direction (arrow Y direction). Further, when the folding device control unit 611 controls the operation of the folding plate slide mechanism 550, the right rotation mechanism 520R moves along the width direction (arrow X direction). Further, the folding device control unit 611 controls the operation of the mounting plate slide mechanism 560, whereby the mounting plate unit (the mounting plate 501, the mounting plate distance adjusting mechanism 530, and the mounting plate front / rear adjusting mechanism 540). Moves along the width direction (arrow X direction).
- the messy T-shirt TS that has been washed and dried is placed on the placing table 200.
- the first point P of the T-shirt TS is gripped by the right chuck portion 310R (first control, first gripping step, step S1).
- the first end point P1 of the T-shirt TS may be gripped by the left chuck portion 310L.
- the first point P is the center position of the T-shirt TS, and the position is detected by the computer 600 based on the image data of the T-shirt TS imaged by the digital still camera 401.
- FIG. 12C by raising the right chuck portion 310R, the T-shirt TS held at the first point P is raised.
- the T-shirt TS gripped by the right chuck portion 310 ⁇ / b> R is moved to the outside of the mounting table 200.
- the right chuck portion 310R is advanced in the horizontal direction (the direction from the right side toward the left side in FIG. 13D).
- the T-shirt TS gripped at the first point P by the right chuck portion 310R moves while contacting the upper surface of the mounting table 200 (step S2). Then, as shown in FIG.
- the 1st end point P1 of T-shirt TS mounted in the mounting base 200 is hold
- the first end point P1 of the T-shirt TS may be gripped by the left chuck portion 310L.
- the right chuck portion 310R is moved backward to the outside of the mounting table 200 by temporarily retracting the right chuck portion 310R to the outside of the mounting table 200.
- the right chuck portion 310R is advanced in the horizontal direction (the direction from the right side to the left side in FIG. 14H).
- the T-shirt TS gripped at the first end point P1 by the right chuck portion 310R moves while being in contact with the upper surface of the mounting table 200 (step S5).
- the first end point P1 and the second end point P2 of the T-shirt TS placed on the placing table 200 are respectively held by the right chuck portion 310R and the left chuck portion 310L.
- (Third control, third gripping step, step S7) are respectively held by the right chuck portion 310R and the left chuck portion 310L.
- step S7 the first end point P1 and the second end point P2 of the T-shirt TS placed on the placing table 200 are respectively held by the right chuck portion 310R and the left chuck portion 310L.
- the T-shirt TS held at the first end point P1 and the second end point P2 is raised.
- the right chuck portion 310R and the left chuck portion 310L are raised so that the straight line connecting the first end point P1 and the second end point P2 is horizontal or substantially horizontal.
- both chuck portions 310R and 310L are temporarily retracted in the horizontal direction, whereby the T-shirt TS held by both the chuck portions 310R and 310L is placed on the mounting table 200.
- both chuck portions 310R and 310L are lowered to bring the T-shirt TS into contact with the mounting table 200, and both chuck portions 310R and 310L are moved from the right side in the horizontal direction (FIG. 15 (l)).
- the T-shirt TS held by the chuck portions 310R and 310L moves while contacting the upper surface of the mounting table 200 (step S8).
- the right chuck portion 310R and the left chuck portion are along a direction orthogonal to the direction in which the chuck portions 310R and 310L advance (arrow D1 direction).
- the right chuck portion 310R and the left chuck portion 310L are revolved so that 310L is arranged.
- the first end point P1 and the third end point P3 of the T-shirt TS placed on the placing table 200 are respectively held by the right chuck portion 310R and the left chuck portion 310L. (4th control, 4th holding process, step S10). At this time, each of the second end point P2 and the third end point P3 may be gripped by the right chuck portion 310R and the left chuck portion 310L.
- the right chuck portion 310R that grips the first end point P1 far from the third end point P3 does not move
- the left chuck portion 310L that grips the second end point P2 closer to the end point P3 moves so as to grip the third end point P3.
- FIG. 16 (o) by raising the right chuck portion 310R and the left chuck portion 310L, the T-shirt TS held at the first end point P1 and the third end point P3 is raised.
- the right chuck portion 310R and the left chuck portion 310L are temporarily retracted in the horizontal direction to place the T-shirt TS held by the chuck portions 310R, 310L on the mounting table 200. Then, the chuck portions 310R and 310L are lowered to bring the T-shirt TS into contact with the mounting table 200, and the chuck portions 310R and 310L are moved to the right in the horizontal direction (FIG. 17 (p)). The T-shirt TS gripped by the chuck portions 310R and 310L moves while being in contact with the upper surface of the mounting table 200 (step S11).
- the right chuck portion 310R and the left chuck portion are along a direction orthogonal to the direction in which the chuck portions 310R and 310L advance (arrow D2 direction).
- the right chuck portion 310R and the left chuck portion 310L are revolved so that 310L is arranged.
- FIG. 17 (q) when the entire T-shirt TS is mounted on the mounting table 200, the horizontal movement of the right chuck portion 310R and the left chuck portion 310L is stopped and the right chuck portion 310R is stopped.
- the T-shirt TS is placed on the placing table 200 by releasing the grip of the T-shirt TS by the left chuck portion 310L.
- the T-shirt TS mounted on the mounting table 200 is imaged by the digital still camera 401, and the image data of the T-shirt TS imaged by the digital still camera 401 is transmitted to the computer 600 to detect the rectangle. It is determined by the part 607 whether or not the outer shape of the T-shirt TS is rectangular (step S12). If it is determined that the outer shape of the T-shirt TS is rectangular (step S12: Yes), the collar portion of the T-shirt TS is detected (step S13). Thereby, when the collar part of T-shirt TS mounted in mounting base 200 is not detected (step S13: No), as shown in FIG.17 (r), T-shirt TS is turned over (7th control, step) S14).
- step S12 determines whether the outer shape of the T-shirt TS is not rectangular (step S12: No), that is, if it is determined that the T-shirt TS is not expanded.
- step S12a both the end point (in the present embodiment, the second end point P2) and the third end point P3 that were not gripped in the previous step are gripped.
- the right chuck portion 310R and the left chuck portion 310L are moved backward to the outside in the horizontal direction to move the T-shirt TS gripped by both the chuck portions 310R and 310L to the outside of the mounting table 200, and then both the chuck portions 310R.
- step S12 the rectangle detection unit 607 determines whether or not the outer shape of the T-shirt TS is rectangular (step S12).
- step S13 when the collar part of T-shirt TS mounted in the mounting base 200 is detected in step S13 (step S13: Yes), as shown in FIG.18 (s), the position on the basis of a collar part is shown.
- Each of the shoulder portions T1 and T2 of the T-shirt TS is gripped by the right chuck portion 310R and the left chuck portion 310L (sixth control, step S15).
- step S14 when turning over the T-shirt TS (step S14), as shown in FIG. 18 (s), when the collar portion of the T-shirt TS is recognized (step S16: Yes), it is shown in FIG. 18 (t).
- each of the shoulder portions T1 and T2 of the T-shirt TS which is the position with respect to the collar portion, is gripped by the right chuck portion 310R and the left chuck portion 310L (step S17). In this state, the right chuck portion 310R and the left chuck portion 310L are raised to complete the development of the T-shirt TS.
- the T-shirt TS developed as described above is placed on the placement plate 501 of the folding device 500.
- both shoulder portions T1 and T2 of the T-shirt TS held by the right chuck portion 310R and the left chuck portion 310L are the base end side of the mounting plate 501, and the hem portion of the T-shirt TS is the mounting plate.
- the T-shirt TS is placed on the placement plate 501 so as to be disposed on the front end side of the 501.
- the side end portion of the T-shirt TS hangs down to the right side rotation mechanism 520R side and the left side rotation mechanism 520L side of the mounting plate 501 and the hem portion of the T-shirt TS hangs down from the front end side of the mounting plate 501. .
- step S18 the routine enters the deviation elimination routine (step S18).
- the details of this deviation elimination routine (step S18) will be described in detail in the running operation of the running shirt RS described later.
- a laundered running shirt RS (hereinafter referred to as a shirt RS) that has been washed and dried is placed on the placement table 200.
- the first point P of the shirt RS in a messy state is gripped by the right chuck portion 310R (first control, first gripping step, step S1 (see FIG. 11). )).
- the first end point P1 of the T-shirt TS may be gripped by the left chuck portion 310L.
- the first point P is the central position of the shirt RS in a messy state, and the position is detected by the computer 600 based on the imaging data of the shirt RS captured by the digital still camera 401.
- the shirt RS gripped at the first point P is raised by raising the right chuck portion 310R.
- the right chuck part 310R is moved back to the outside of the mounting table 200 after the shirt RS held by the right chuck part 310R is moved backward in the horizontal direction.
- the chuck portion 310R is lowered to bring the shirt RS into contact with the mounting table 200, and the right chuck portion 310R is advanced in the horizontal direction (the direction from the right side to the left side in FIG. 20C) to thereby move the right chuck.
- the shirt RS gripped at the first point P by the part 310R moves while contacting the upper surface of the mounting table 200 (step S2).
- the shirt RS placed on the placing table 200 is imaged by the digital still camera 401, and the image data of the shirt RS imaged by the digital still camera 401 is transmitted to the computer 600 to detect the first end point.
- the first endpoint P1 is detected by the unit 601 (first endpoint detection step, step S3).
- the 1st end point P1 of shirt RS mounted on the mounting base 200 is hold
- the first end point P1 of the shirt RS may be gripped by the left chuck portion 310L.
- the right chuck part 310R is once moved backward in the horizontal direction to move the shirt RS gripped by the right chuck part 310R to the outside of the mounting table 200, and then to the right
- the right chuck portion 310R is advanced in the horizontal direction (the direction from the right side toward the left side in FIG.
- step S6 thereby causing the shirt RS to move forward. Moves while contacting the upper surface of the mounting table 200 (step S5). Then, as shown in FIG. 21 (f), when the entire shirt RS is placed on the placing table 200, the horizontal movement of the right chuck portion 310R is stopped, and the gripping of the shirt RS by the right chuck portion 310R is stopped. By canceling, the shirt RS is placed on the placing table 200. At this time, the shirt RS placed on the placing table 200 is imaged by the digital still camera 401, and the image data of the shirt RS imaged by the digital still camera 401 is transmitted to the computer 600 to detect the second end point. The second end point P2 is detected by the unit 602 (second end point detection step, step S6).
- the first end point P1 and the second end point P2 of the shirt RS placed on the placing table 200 are respectively gripped by the right chuck portion 310R and the left chuck portion 310L (third control, third gripping step, step S7). ).
- the right chuck part 310R and the left chuck part 310L are once retracted in the horizontal direction, whereby the shirt RS gripped by the chuck parts 310R, 310L is placed on the mounting table 200.
- the chuck portions 310R and 310L are lowered to bring the shirt RS into contact with the mounting table 200, and the chuck portions 310R and 310L are moved to the upper right in the horizontal direction (FIG. 22 (g)).
- the shirt RS gripped by the chuck portions 310R and 310L moves while abutting on the upper surface of the mounting table 200 (step S8).
- the right chuck portion 310R and the left chuck portion are along a direction orthogonal to the direction in which the chuck portions 310R and 310L are advanced (arrow D4 direction).
- the right chuck portion 310R and the left chuck portion 310L are revolved so that 310L is arranged.
- FIG. 22 (h) when the entire shirt RS is placed on the placing table 200, the horizontal movement of the right chuck portion 310R and the left chuck portion 310L is stopped, and the right chuck portion 310R and The shirt RS is placed on the placing table 200 by releasing the gripping of the shirt RS by the left chuck portion 310L.
- the shirt RS placed on the placing table 200 is imaged by the digital still camera 401, and the image data of the shirt RS imaged by the digital still camera 401 is transmitted to the computer 600 to detect the third end point.
- the third end point P3 is detected by the unit 603 (third end point detection step, step S9).
- the first end point P1 and the third end point P3 of the shirt RS placed on the placing table 200 are respectively gripped by the right chuck portion 310R and the left chuck portion 310L (fourth control, fourth gripping step, step S10). ).
- FIG. 22 (j) by raising the right chuck portion 310R and the left chuck portion 310L, the shirt RS gripped at the first end point P1 and the third end point P3 is raised.
- the shirt RS held by the chuck portions 310R and 310L is temporarily moved backward in the horizontal direction by moving the right chuck portion 310R and the left chuck portion 310L in the horizontal direction.
- both the chuck portions 310R and 310L are lowered to bring the shirt RS into contact with the mounting table 200, and both the chuck portions 310R and 310L are placed on the upper right side in the horizontal direction (FIG. 23 (j)).
- the shirt RS gripped by the chuck portions 310R and 310L moves while abutting on the upper surface of the mounting table 200 (step S11).
- the right chuck portion 310R and the left chuck portion are along a direction orthogonal to the direction in which the chuck portions 310R and 310L advance (arrow D5 direction).
- the right chuck portion 310R and the left chuck portion 310L are revolved so that 310L is arranged.
- FIG. 23 (k) when the entire shirt RS is placed on the placing table 200, the horizontal movement of the right chuck portion 310R and the left chuck portion 310L is stopped, and the right chuck portion 310R and The shirt RS is placed on the placing table 200 by releasing the gripping of the shirt RS by the left chuck portion 310L.
- step S12 the shirt RS placed on the placing table 200 is imaged by the digital still camera 401, and the image data of the shirt RS imaged by the digital still camera 401 is transmitted to the computer 600, and the outer shape of the shirt RS. It is determined whether or not the shape is rectangular (step S12). If it is determined that the outer shape of the shirt RS is rectangular (step S12: Yes), the collar portion of the shirt RS is detected (step S13). Thereby, when the collar part of shirt RS mounted on the mounting base 200 is not detected (step S13: No), the shirt RS is turned over (step S14).
- step S18 when the collar portion is not detected even if the shirt RS is turned over (step S16: No), the “deviation elimination routine” is controlled (step S18).
- the “deviation elimination routine” will be described in detail with reference to FIG.
- the collar may not be detected even if it is turned over repeatedly.
- the shirt RS held at the first end point P1 and the third end point P3 is raised by raising the right chuck portion 310R and the left chuck portion 310L.
- the lower end of the shirt RS held at the first end point P1 and the third end point P3 is lowered by slightly lowering the right chuck portion 310R and the left chuck portion 310L. 200 (eighth control, step S21).
- FIG. 24L the shirt RS held at the first end point P1 and the third end point P3 is raised by raising the right chuck portion 310R and the left chuck portion 310L. 200 (eighth control, step S21).
- the shirt RS is placed on the placing table 200, the horizontal movement of the right chuck portion 310R and the left chuck portion 310L is stopped, and the right chuck portion 310R and the left chuck portion are stopped.
- the shirt RS is placed on the placing table 200 by releasing the gripping of the shirt RS by the portion 310L.
- the shirt RS placed on the placing table 200 is imaged by the digital still camera 401, and the image data of the shirt RS imaged by the digital still camera 401 is transmitted to the computer 600 to detect the fourth end point.
- the fourth end point P4 is detected by the unit 604 (fourth end point detection step, step S23).
- the fourth end point P4 of the shirt RS placed on the placement table 200 is gripped by the right chuck portion 310R (ninth control, fifth gripping step, step S24).
- the fourth end point P4 of the shirt RS may be gripped by the left chuck portion 310L.
- the shirt RS gripped at the fourth end point P4 is raised by raising the right chuck portion 310R.
- the right chuck part 310R is moved backward to the outside in the horizontal direction by moving the shirt RS held by the right chuck part 310R to the outside of the mounting table 200, and then the right chuck part 310R.
- the chuck portion 310R is lowered to bring the shirt RS into contact with the mounting table 200, and the right chuck portion 310R is advanced in the horizontal direction (the direction from the upper right side to the lower left side in FIG. 25 (q)).
- the shirt RS held at the first position P by the right chuck portion 310R moves while contacting the upper surface of the mounting table 200 (step S25).
- the fourth end point P4 and the fifth end point P5 of the shirt RS placed on the placing table 200 are respectively gripped by the right chuck portion 310R and the left chuck portion 310L (tenth control, sixth gripping step, step S27). ).
- the shirt RS held at the fourth end point P4 and the fifth end point P5 is raised.
- the right chuck part 310R and the left chuck part 310L are temporarily retracted in the horizontal direction, whereby the shirt RS gripped by the chuck parts 310R, 310L is placed outside the mounting table 200.
- the chucks 310R and 310L are lowered to bring the shirt RS into contact with the mounting table 200, and the chucks 310R and 310L are moved from the upper right side in the horizontal direction (FIG. 26 (t)).
- the shirt RS gripped at the fourth end point P4 and the fifth end point P5 by the right chuck portion 310R and the left chuck portion 310L is brought into contact with the upper surface of the mounting table 200 by being advanced in the direction toward the lower left oblique direction. Move (step S28).
- the right chuck portion 310R and the left chuck portion are along the direction orthogonal to the direction in which the chuck portions 310R and 310L advance (arrow D6 direction).
- the right chuck portion 310R and the left chuck portion 310L are revolved so that 310L is arranged.
- the fourth end point P4 and the sixth end point P6 of the shirt RS placed on the placing table 200 are respectively gripped by the right chuck portion 310R and the left chuck portion 310L (the eleventh control, the seventh gripping step, step S30). ). Then, as shown in FIG. 27 (v), by raising the right chuck portion 310R and the left chuck portion 310L, the shirt RS held at the fourth end point P4 and the sixth end point P6 is raised.
- the shirt RS gripped by the chuck parts 310R, 310L is moved to the outside of the mounting table 200, and then the chuck parts 310R, 310L is lowered to bring the shirt RS into contact with the mounting table 200, and both chuck portions 310R and 310L are advanced in the horizontal direction (the direction from the upper right to the lower left in FIG. 27 (w)).
- the shirt RS held at the fourth end point P4 and the sixth end point P6 by the right chuck portion 310R and the left chuck portion 310L moves while contacting the upper surface of the mounting table 200 (step S31).
- the right chuck portion 310R and the left chuck portion are along a direction orthogonal to the direction in which the chuck portions 310R and 310L advance (arrow D7 direction).
- the right chuck portion 310R and the left chuck portion 310L are revolved so that 310L is arranged.
- FIG. 27 (w) when the entire shirt RS is placed on the placing table 200, the horizontal movement of the right chuck portion 310R and the left chuck portion 310L is stopped, and the right chuck portion 310R and The shirt RS is placed on the placing table 200 by releasing the gripping of the shirt RS by the left chuck portion 310L.
- the shirt RS placed on the placing table 200 is imaged by the digital still camera 401, and the image data of the shirt RS imaged by the digital still camera 401 is transmitted to the computer 600, and the outer shape of the shirt RS. Whether or not is rectangular is determined (step S32).
- step S32: Yes When it is determined that the outer shape of the shirt RS is rectangular (step S32: Yes), the collar portion of the shirt RS is detected (step S33). Thereby, when the collar part of shirt RS mounted on the mounting base 200 is not detected (step S33: No), the shirt RS is turned over (seventh control, step S34). Specifically, the shirt RS is raised by gripping each of the corner portions C1 and C2 of the hem portion by the right chuck portion 310R and the left chuck portion 310L and raising the right chuck portion 310R and the left chuck portion 310L. Let Then, as shown in FIG.
- the developed shirt RS is placed on the placement plate 501 of the folding device 500.
- both shoulder portions T1 and T2 of the shirt RS gripped by the right chuck portion 310R and the left chuck portion 310L are on the base end side of the placement plate 501, and the bottom portion of the shirt RS is the placement plate 501.
- the shirt RS is placed on the placement plate 501 so as to be disposed on the distal end side.
- the side end portion of the shirt RS hangs down to the right side rotation mechanism 520R side and the left side rotation mechanism 520L side of the placement plate 501, and the skirt portion of the shirt RS hangs down from the front end side of the placement plate 501.
- step S35, step S32a, and step S32b in FIG. 19 are the same as step S15, step S12a, and step S12b, respectively, and thus description thereof is omitted.
- the operation of the deployment device 300 described above is realized by controlling the moving mechanism 320 and the gripping unit 310 by the computer 600 (the moving mechanism control unit 609 and the gripping unit control unit 610).
- FIG. 29 ⁇ Folding operation of folding object by folding device>
- the folding operation of the folding object by the folding device 500 will be described with reference to FIGS. 29 to 32.
- the folding device 500 is in the state shown in FIG. 29A, that is, the folding plates 511 to 514 hang down in a substantially vertical direction when viewed from the front (initial state). .
- a folding object such as a fabric is placed on the placing plate 501.
- the width of the mounting plate 501 is adjusted by the mounting plate distance adjusting mechanism 530, and the tip position of the mounting plate 501 is adjusted by the mounting plate front-rear adjusting mechanism 540.
- the second folding plate 512 approaches the placement plate 501 (arrow R11 direction, clockwise) by the middle shaft rotation motor 522L (see FIG. 8) of the left rotation mechanism 520L.
- the second folding plate 512 is brought close to the vicinity of the lower surface of the mounting plate 501.
- a part of the folding object that hangs down to the left rotation mechanism 520 ⁇ / b> L side of the mounting plate 501 is sandwiched and folded between the second folding plate 512 and the mounting plate 501.
- the middle folding motor 522R of the right side rotation mechanism 520R is approximately 90 in the direction in which the first folding plate 511 approaches the mounting plate 501 (arrow R12 direction, counterclockwise).
- the first folding plate 511 is brought into a state of being close to the vicinity of the lower surface of the second folding plate 512 by being rotated.
- a part of the folding object that hangs down to the right rotation mechanism 520R side of the mounting plate 501 is sandwiched and folded between the first folding plate 511 and the second folding plate 512.
- the outer shaft rotation motor 523L of the left rotation mechanism 520L causes the fourth folding plate 514 to approach approximately the mounting plate 501 (arrow R11 direction, clockwise) by approximately 90.
- the fourth folding plate 514 is brought into proximity to the vicinity of the lower surface of the first folding plate 511 by being rotated.
- a part of the folding object that hangs down to the left rotation mechanism 520L side of the first folding plate 511 is sandwiched and folded between the fourth folding plate 514 and the first folding plate 511.
- the outer shaft rotation motor 523R of the right-side rotation mechanism 520R causes the third folding plate 513 to approach the placement plate 501 (arrow R12 direction, counterclockwise).
- the third folding plate 513 is rotated by 90 ° and is brought into a state of being close to the vicinity of the lower surface of the fourth folding plate 514.
- a part of the folding object that hangs down to the right rotation mechanism 520R side of the fourth folding plate 514 is sandwiched and folded between the third folding plate 513 and the fourth folding plate 514.
- a drawing plate (not shown) is lifted to a predetermined height by the gripping portion 310 and the moving mechanism 320 of the developing device 300 described above and moved so as to be close to the lower surface of the third folding plate 513.
- a part of the folding object (a hem part in the case of a T-shirt or a running shirt) hanging on the front end side of the mounting plate 501 is placed on the extraction plate (not shown) and the third folding plate 513. It is sandwiched and folded.
- the folding plate sliding mechanism 550 slides the right rotation mechanism 520R in the direction away from the left rotation mechanism 520L (arrow X1 direction).
- the distance between the mounting plate 501 and the folding plates 511 and 513 is relatively separated, and the folding plates 511 and 513 are removed from the folding object.
- the placement plate slide mechanism 560 slides the placement plate 501 in the direction away from the left side rotation mechanism 520L (arrow X1 direction).
- the distance between the mounting plate 501 and the folding plates 512 and 514 is relatively separated, and the folding plates 512 and 514 are removed from the folding object.
- folding device 500 is performed by a computer 600 (folding device control unit 611) by the folding device 500 (a pair of mounting plates 501, four folding plates 511 to 514, a double shaft rotation mechanism). This is realized by controlling the mounting plate distance adjustment mechanism 530, the mounting plate longitudinal adjustment mechanism 540, the folding plate slide mechanism 550, and the placement plate slide mechanism 560).
- the third end point P3 can be detected and gripped without using a suction device or the like that spreads the folding object, so that the folding object can be developed with a simple configuration.
- the folding object processing apparatus 1 is completely unfolded even if the first end point P1 and the third end point P3 are gripped and moved while contacting the mounting table 200. If not (step S12: No, step S32: No), the folding object is gripped by a combination of end points different from the end points gripped by the gripping part 310 in the previous step (step S12a, step S32a). In other words, the folding object can be unfolded by changing to an end point different from the end point gripped by the grip portion 310 in the previous step.
- the folding object processing apparatus 1 is different from the end points (P1, P3) gripped by the gripping unit 310 in the previous step.
- the folding object can be gripped by a combination of end points (P2, P3). That is, it is possible to prevent the folding object from being repeatedly held at the same end point. As a result, it is possible to suppress an increase in the number of times of gripping by the gripping part 310 until the folding of the folding object is completed, and the folding time of the folding object is shortened.
- the right chuck portion 310R that grips the first end point P1 far from the third end point P3 does not move.
- the left chuck portion 310L that grips the second end point P2 closer to the third end point P3 moves so as to grip the third end point P3. That is, since the moving distance of the left chuck portion 310L that goes to grip the third end point P3 can be shortened, the unfolding time of the folding object is shortened.
- the folding object moves while abutting against the mounting table 200, so that a frictional force in a direction opposite to the moving direction is generated in the folding object. To do. Thereby, the twist and entanglement of a folding object can be eliminated. As a result, it is possible to detect the rear end in the movement direction of the grip portion 310 that is the end point (first end point P1, second end point P2, and third end point P3) of the folding object.
- the work can be performed by placing the folding object on the mounting table 200 by including the mounting table 200.
- the left chuck portion 310L for gripping the second end point P2 is It can be used as a gripping part 310 that grips the three end points P3. That is, the gripping portion 310 (the right chuck portion 310R and the left chuck portion 310L) does not need to simultaneously grip the three points of the first end point P1, the second end point P2, and the third end point P3, and can grip two points at the same time. Therefore, it is possible to prevent the number of chuck portions from increasing. As a result, the configuration of the grip portion 310 is simplified.
- a several folding object is aligned in the position on the basis of a collar part by hold
- the folding device 500 can smoothly perform the folding operation.
- a 1st characteristic part (rectangular external shape) and a 2nd characteristic part (collar part) are shown. Can be detected. Thereby, the recognition rate of the 1st characteristic part and the 2nd characteristic part improves compared with the case where the 1st characteristic part and the 2nd characteristic part are detected in the state where the folding object was suspended.
- step S13 when detection of a collar part fails (step S13: No), a folding object can be turned over and a collar part can be exposed (step S14). ). Thereby, it becomes possible to hold
- the folding object processing apparatus 1 when the running shirt RS is turned over (step S14) and the collar portion of the running shirt RS cannot be detected, the deviation elimination routine (step S18 (steps S21 to S21).
- the running shirt RS is developed by performing S37)). Specifically, when the running shirt RS is turned over (step S14) and the collar portion of the running shirt RS cannot be detected (step S16: No), first, both the third end point P3 and the first end point P1 are used. The gripping part 310 is lowered until the lower end of the running shirt RS to be gripped contacts the mounting table 200 (step S21).
- a portion where the shape of the running shirt RS is difficult to collapse (for example, a portion where a seam such as a shoulder of the running shirt is present) can be detected as the fourth end point P4 (step S23).
- the grip portion 310 grips the fourth end point P4 of the running shirt RS (step S24).
- angular part (part where a shape is hard to collapse) of running shirt RS is gripped by the holding part 310.
- the fifth end point P5 farthest from the fourth end point P4 of the running shirt RS can be detected (step S26).
- the grip portion 310 grips both the fourth end point P4 and the fifth end point P5 of the running shirt RS (step S27).
- the corners arranged at the diagonal positions of the corners are gripped by the gripping portion 310.
- the grip portion 310 grips the fourth end point P4 and the sixth end point P6 of the running shirt RS (step S30).
- two adjacent corner portions (parts whose shapes are difficult to collapse) of the running shirt RS are gripped by the gripping portion 310, and the running shirts RS arranged randomly are developed.
- the folding object processing apparatus 1 can be made compact by the installation space of the mounting table 200.
- the folding object cannot be handled in the air simply by adding the third chuck portion.
- the moving mechanism 320 is realized by a belt slider mechanism or a ball screw mechanism.
- the present invention is not limited thereto, and the moving mechanism 320 is an air cylinder. You may implement
- step S6 second endpoint detection step
- step S9 step S9
- step 26 step S9
- step S29 step S29
- the second end point P2, the third end point P3, the fifth end point P5, and the sixth end point P6 can be detected without releasing the gripping of the TS and the shirt RS of the T-shirt by the chuck portions 310R and 310L.
- the present invention is not limited to this, and the rear end of the folding object (the folding object is detected by a sensor such as an optical sensor).
- the first point P and the first end point P1 to the sixth end point P6 may be detected by detecting the points that are no longer performed.
- the light emitting element and the light receiving element are arranged in the vicinity of the upper surface of the mounting table 200, and the object to be folded held by the holding unit 310 is gripped so as to pass between the light emitting element and the light receiving element.
- the unit 310 and the moving mechanism 320 are controlled. Then, the position where the light blocking by the folding object is released is detected as the first end point P1 to the sixth end point of the folding object.
- the present invention is not limited to this, and an infrared camera is used. You may detect the 2nd characteristic part (collar part) of a folding object.
- the infrared camera images the folding object placed on the mounting table 200 to acquire transmission imaging data of the folding object, and transmits the acquired transmission imaging data to the computer 600.
- the computer 600 performs image processing based on the received transmission imaging data, detects a collar part of the folding object, and at which position of the folding object the collar part is placed on the placing table 200. Identify if there is.
- the infrared camera it is possible to specify the position of the second characteristic portion (collar portion) that transmits less infrared light than other portions. Thereby, even if it does not perform control (step S14 and step S34) which turns over a folding object in order to expose the 2nd characteristic part of a folding object, the position on the basis of the 2nd characteristic part of a folding object Can be gripped.
- a natural light camera and an infrared camera may be used in combination. In this case, when the second feature portion (collar portion) cannot be detected as a result of imaging the folding object with the natural light camera, the folding object is imaged with the infrared camera, and the second feature portion (collar portion). Specify the position of.
- step S14 and step S34 the position on the basis of the 2nd characteristic part (collar part) of a folding object can be hold
- a CCD camera can be used instead of the infrared camera described above. Specifically, the light beam is irradiated from the lower part of the folding object, and the amount of light transmitted through the second characteristic part (collar part) of the folding object is detected by the CCD camera, so that You may specify the position of 2 characteristic parts (collar part).
- FIG. A suspension member 700 as shown may be provided.
- the suspension member 700 includes a thin plate member, a rod member, and the like that are horizontally supported at a predetermined height position (position in the Z direction). If such a suspension member 700 is used, the end point of the folding object can be detected in a state where the folding object is suspended from the suspension member 700. In such a case, the digital still camera 401 is installed horizontally toward the suspension member 700.
- the elevator lowers the lifting bar 710 from above the folding object to the space between the gripping part 310 and the suspension member 700.
- the folding object is stretched over two suspension members 700 arranged in parallel or substantially in parallel.
- the elevating bar 710 is lowered from above the folding object into the space between the two suspension members 700.
- the elevator is connected to the computer 600 and the elevator bar 710 is raised and lowered based on a command from the computer 600.
- the timing at which the computer 600 issues a command to lower the lift bar 710 to the elevator is, for example, that the object to be folded is in the space between the grip portion 310 and the suspension member 700 or between the two suspension members 700.
- the presence of the folding object is not detected in the imaging region RP.
- the gripping portion 310 and the suspension member 700 The sensor may be arranged in advance downward or upward above or below the space between the two suspension members 700. Then, when the end point of the folding object is detected in the imaging region RP, the computer 600 may raise the lifting bar 710 with respect to the elevator.
- the folding object is detected in the same manner as when the end point of the folding object is detected using the mounting table 200.
- the folding object can be moved while abutting on the suspension member 700. For this reason, the twist and entanglement of a folding object can be eliminated.
- the installation space required for installing the suspension member 700 is smaller than that of the mounting table 200 that spreads in a plane, the folding object processing apparatus 1 can be made compact.
- the digital still camera 401 is disposed on both sides of the suspension member 700 to capture images of both sides of the folding object, or the suspension member 700 is digitally disposed on one side.
- the digital still camera 401 and a mirror are arranged on the other side and taking images of both sides of the folding object with the one digital still camera 401, rectangular detection is simultaneously performed on both sides of the folding object. And collar detection can be performed.
- the control of turning the folding object for example, T-shirt TS, running shirt RS
- upside down is omitted. be able to.
- the digital still camera 401 is arranged on one side of the suspension member 700 and a mirror is arranged on the other side and images of both sides of the folding object are taken by the one digital still camera 401, a plurality of mirrors It is practical to use multiple reflections.
- the example provided with the mounting base 200 is demonstrated, and the folding object processing apparatus 1 which concerns on a previous modification (H) is about an example provided with a pole.
- any area may be used as long as the folding object is moved while abutting on the floor. Therefore, there is no need to provide the mounting table 200 or the pole, and the floor (the folding object processing apparatus 1 is mounted).
- the surface to be placed may be set as the placement area. Thereby, since it can reduce by the space which installs the mounting base 200 and a pole, size reduction of the folding object processing apparatus 1 can be achieved.
- the first end point detection unit 601 is folded at the first point P based on the imaging data transmitted from the digital still camera 401. A plane image of the object is formed, and the first end point P1 farthest from the first point P is detected from the plane image.
- the first end point detection unit 601 detects the first end point P1 as follows. May be.
- the first end point detection unit 601 detects, for example, an edge of the mounting table 200 on the grip unit entry side (hereinafter referred to as “front edge”) as a reference line, and detects a point closest to the reference line as the first end point P1. To do.
- the front edge of the mounting table 200 needs to be within the imaging area of the digital still camera 401.
- the reference line is not limited to the front edge of the mounting table 200.
- the reference line may be a physical line provided in the vicinity of the front edge of the mounting table 200, or an image on the front edge of the mounting table 200 or in the vicinity thereof in the imaging area of the digital still camera 401. It may be a line provided as data.
- the reference line is preferably orthogonal to the advancing / retreating direction of the grip portion 310, that is, the advancing / retreating direction of the proximity / separation mechanism 330.
- the first end point detection unit 601 uses, as a reference line, an edge on the opposite side to the gripping part entry side of the mounting table 200 (hereinafter referred to as “back edge”), and a point farthest from the reference line as the first end point Detect as P1.
- the back edge of the mounting table 200 needs to be within the imaging area of the digital still camera 401.
- the reference line is not limited to the inner edge of the mounting table 200.
- the reference line may be a physical line provided in the vicinity of the back edge of the mounting table 200, or an image on the back edge of the mounting table 200 or in the vicinity thereof in the imaging region of the digital still camera 401. It may be a line provided as data.
- the reference line is preferably orthogonal to the advancing / retreating direction of the grip portion 310, that is, the advancing / retreating direction of the proximity / separation mechanism 330.
- the second endpoint detection unit 602 is folded by the first endpoint P1 based on the imaging data transmitted from the digital still camera 401. A plane image of the object is formed, and the second end point P2 farthest from the first end point P1 is detected from the plane image.
- the second end point detection unit 602 performs the above-described modification (J) (i) and ( As shown in ii), the second end point P2 may be detected.
- the third end point detection unit 603 determines whether the first end point P1 and the second end point P2 are based on the imaging data transmitted from the digital still camera 401. A plane image of the folding object gripped by both is formed, and the third end point P3 farthest from the straight line L1 is detected from the plane image.
- the third end point detection unit 603 is the above-described modification (J).
- the third end point P3 may be detected as shown in (i) and (ii) of FIG.
- the fourth end point detection unit 604 determines which of the first end point P1 and the second end point P2 based on the imaging data transmitted from the digital still camera 401. Forming a plane image of the folding object held by both the heel and the third end point P3, and detecting the fourth end point P4 farthest from the straight line L2 from the plane image, the fourth end point detection unit 604, As shown in (i) and (ii) of the above-described modification (J), the fourth end point P4 may be detected.
- the fifth endpoint detection unit 605 is folded at the fourth endpoint P1 based on the imaging data transmitted from the digital still camera 401. A plane image of the object is formed, and the fifth end point P5 farthest from the fourth end point P4 is detected from the plane image, and the fifth end point detection unit 605 performs the above-described modifications (J) (i) and ( As shown in ii), the fifth end point P5 may be detected.
- the sixth end point detection unit 606 determines whether the fourth end point P4 and the fifth end point P5 are based on the imaging data transmitted from the digital still camera 401. A plane image of the folding object gripped by both is formed, and the sixth end point P6 farthest from the straight line L3 is detected from the plane image, and the sixth end point detection unit 606 performs the above modification (J).
- the sixth end point P6 may be detected as shown in (i) and (ii) of FIG.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Textile Engineering (AREA)
- Manipulator (AREA)
- Sewing Machines And Sewing (AREA)
- Toys (AREA)
Abstract
Description
本発明の一局面に係る変形性薄物展開装置は、変形性薄物を展開する変形性薄物展開装置であって、把持部、移動機構、端点検出部および制御部を備える。把持部は、変形性薄物を把持する。移動機構は、把持部を移動させる。端点検出部は、「第1基準線もしくは第1基準点から最も遠い変形性薄物の端点」または「第2基準線もしくは第2基準点から最も近い変形性薄物の端点」を検出する。なお、第1基準線、第1基準点、第2基準線、第2基準点は、固定されてもよいし、端点検出毎に変更されてもよい。そして、制御部は、第1制御、第2制御、第3制御、第4制御、第5制御、第6制御および第7制御を行う。第1制御では、把持部が第1点で変形性薄物を把持するように、制御部が把持部および移動機構を制御する。第2制御は、第1制御後に実行される。第2制御では、制御部が、端点検出部に対して端点を検出させる。第3制御は、第2制御後に実行される。第3制御では、第2制御において検出された端点(以下「第1端点」という)で把持部が変形性薄物を把持するように、制御部が把持部および移動機構を制御する。第4制御は、第3制御後に実行される。第4制御では、制御部が、端点検出部に対して端点を検出させる。第5制御は、第4制御後に実行される。
第5制御では、「第1端点」と「第4制御において検出された端点(以下「第2端点」という)」との両方で把持部が変形性薄物を把持するように、制御部が把持部および移動機構を制御する。第6制御は、第5制御後に実行される。第6制御では、制御部が、端点検出部に対して端点を検出させる。第7制御は、第6制御後に実行される。第7制御では、「第1端点または第2端点」と「第6制御において検出された端点(以下「第3端点」という)」との両方で把持部が変形性薄物を把持するように、制御部が把持部および移動機構を制御する。
また、「把持部」は、変形性薄物を把持可能な構成であればよく、例えば、把持部は、一対のフィンガを有し、その一対のフィンガが互いに近接または離間するように構成される。
また、「移動機構」は、ベルトスライダ機構、ボールネジ機構、エアシリンダ機構、モータシリンダ機構、電動スライダ機構、リニアスライダ機構およびラックピニオン機構などの機構が挙げられる。なお、これらの機構は、主に、駆動源、送り部材およびガイド部材から構成されている。ベルトスライダ機構は、モータを駆動源とし、ベルト又はワイヤを送り部材とし、LMガイド材等をガイド部材とするスライド移動機構であって、モータの回転をベルト又はワイヤに伝達して移動対象物をLMガイド材等のガイド部材に沿ってスライド移動させる機構である。また、ボールネジ機構は、モータを駆動源とし、ボールネジ又は台形ネジを送り部材とし、LMガイド材等をガイド部材とするスライド移動機構であって、モータの回転をボールネジ又は台形ネジに伝達して移動対象物をLMガイド等のガイド部材に沿ってスライド移動させる機構である。また、エアシリンダ機構は、エアコンプレッサを駆動源とし、ピストンロッドを送り部材兼ガイド部材とするスライド移動機構であって、ピストンロッドの直動を利用してピストンロッドに取り付けられた移動対象物をスライド移動させる機構である。また、モータシリンダ機構は、モータを駆動源とし、ピストンロッドを送り部材兼ガイド部材とするスライド移動機構であって、モータの回転をボールネジに伝達してピストンロッドに取り付けられた移動対象物をスライドさせる機構である。また、電動スライダ機構は、モータを駆動源とし、ボールネジ等を送り部材とし、LMガイド材等をガイド部材とするスライド移動機構であって、モータの回転をボールネジに伝達して移動対象物をLMガイド材等のガイド部材に沿ってスライド移動させる機構である。また、リニアスライダ機構は、磁石を駆動源とし、送り部材を同じく磁石とし、LMガイド材等をガイド部材とするスライド移動機構であって、リニアモータの原理を利用して移動対象物をスライド移動させる機構である。また、ラックピニオン機構は、モータを駆動源とし、ラックおよびピニオンを送り部材とし、LMガイド材等をガイド部材とするスライド移動機構であって、モータの回転によりピニオンを回転させ、ラックに取り付けられた移動対象物をLMガイド材等のガイド部材に沿ってスライド移動させる機構である。
また、「端点検出部」は、カメラ等の撮像手段により撮像された変形性薄物の画像を解析して変形性薄物の端点を検出するものであってもよいし、センサ(例えば、光センサなど)により変形性薄物の移動方向の後端を検知することによって、その後端を変形性薄物の端点とするものであってもよい。また、この「端点検出部」は、複数の装置から構成されていてもよいし、単体の装置であってもよい。
上述(1)の変形性薄物展開装置において、制御部は、第5制御後第6制御前に、第8制御をさらに行う。第8制御では、第1端点と第2端点とを結ぶ直線が略水平となるように、制御部が移動機構を制御する。なお、第8制御において、第1端点と第2端点とは把持部により把持された状態にある。
上述(1)または(2)の変形性薄物展開装置において、制御部は、第2制御において、端点検出部に対し、第1点から最も遠い第1端点を検出させ、第4制御において、端点検出部に対し、第1端点から最も遠い第2端点を検出させ、第6制御において、端点検出部に対し、第1端点と第2端点とを結ぶ直線から最も遠い第3端点を検出させる。
上述(1)または(2)の変形性薄物展開装置において、第1基準線は、固定されている。なお、変形性薄物が載置領域に載置された状態で端点検出が行われる場合、第1基準線は、端点出現領域の奥側に設置される。また、変形性薄物が懸垂部材に懸垂された状態で端点検出が行われる場合、第1基準線は、端点出現領域の上側に設置される。また、第1基準線は、載置領域、懸垂部材に物理的に設けられてもよいし、端点検出部を構成する画像装置の画像上のデータとして設けられてもよい。そして、この変形性薄物展開装置において、制御部は、第2制御において、端点検出部に対し、第1基準線から最も遠い第1端点を検出させ、第4制御において、端点検出部に対し、第1基準線から最も遠い第2端点を検出させ、第6制御において、端点検出部に対し、第1基準線から最も遠い第3端点を検出させる。
上述(1)または(2)の変形性薄物展開装置において、第2基準線は、固定されている。なお、変形性薄物が載置領域に載置された状態で端点検出が行われる場合、第2基準線は、端点出現領域の手前側に設置される。また、変形性薄物が懸垂部材に懸垂された状態で端点検出が行われる場合、第1基準線は、端点出現領域の下側に設置される。また、第2基準線は、載置領域、懸垂部材に物理的に設けられてもよいし、端点検出部を構成する画像装置の画像上のデータとして設けられてもよい。そして、この変形性薄物展開装置において、制御部は、第2制御において、端点検出部に対し、第2基準線から最も近い第1端点を検出させ、第4制御において、端点検出部に対し、第2基準線から最も近い第2端点を検出させ、第6制御において、端点検出部に対し、第2基準線から最も近い第3端点を検出させる。
上述(1)から(5)のいずれかの変形性薄物展開装置において、制御部は、第7制御後に第9制御をさらに行う。第9制御では、「第1端点および第2端点のうち第7制御において把持されなかった方の端点」と「第3端点」との両方で把持部が変形性薄物を把持するように、制御部が把持部および移動機構を制御する。
上述(1)から(6)のいずれかの変形性薄物展開装置において、制御部は、第7制御において、「第1端点および第2端点のうち第3端点から遠い方の端点」と「第3端点」との両方で把持部が変形性薄物を把持するように把持部および移動機構を制御する。
上述(1)から(7)のいずれかの変形性薄物展開装置は、変形性薄物を載置する載置領域をさらに備える。そして、制御部は、第1制御と第2制御との間、第3制御と第4制御との間、第5制御と第6制御との間に、把持部によって把持された変形性薄物が載置領域に当接しながら移動するように把持部および移動機構を制御する。
上述(1)から(8)のいずれかの変形性薄物展開装置は、第1特徴部分検出部および第2特徴部分検出部をさらに備える。第1特徴部分検出部は、変形性薄物の第1特徴部分を検出する。第2特徴部分検出部は、変形性薄物の第2特徴部分を検出する。そして、制御部は、第7制御後において、第1特徴部分検出部により変形性薄物の第1特徴部分が検出され、且つ、第2特徴部分検出部により変形性薄物の第2特徴部分が検出される場合、第10制御をさらに行う。第10制御では、第2特徴部分を基準とする位置を把持部が把持するように、制御部が把持部および移動機構を制御する。
上述(9)の変形性薄物展開装置において、制御部は、第7制御後において、第1特徴部分検出部により変形性薄物の第1特徴部分が検出され、且つ、第2特徴部分検出部により変形性薄物の第2特徴部分が検出されない場合、第11制御をさらに行う。第11制御では、変形性薄物を裏返すように、制御部が把持部および移動機構を制御する。
上述(9)の変形性薄物展開装置において、第2特徴部分検出部は、変形性薄物の第2特徴部分の位置を特定可能な赤外線カメラを含む。
上述(10)または(11)の変形性薄物展開装置において、制御部は、第12制御、第13制御、第14制御、第15制御、第16制御、第17制御および第18制御をさらに行う。なお、第12制御は、第11制御後において、第2特徴部分検出部により第2特徴部分が検出されない場合に行われる。第12制御では、把持部により「第1端点または第2端点」と「第3端点」との両方で把持される変形性薄物の下端が載置領域に接触するように、制御部が把持部および移動機構を制御する。第13制御は、第12制御後に実行される。第13制御では、制御部が端点検出部に対して端点を検出させる。第14制御は、第13制御後に実行される。第14制御では、第13制御において検出された端点(以下「第4端点」という)で把持部が変形性薄物を把持するように、制御部が把持部および移動機構を制御する。第15制御は、第14制御後に実行される。第15制御では、制御部が端点検出部に対して端点を検出させる。第16制御は、第15制御後に実行される。第16制御では、「第4端点」と「第15制御において検出された端点(以下「第5端点」という)との両方で把持部が変形性薄物を把持するように、制御部が把持部および移動機構を制御する。第17制御は、第16制御後に実行される。第17制御では、制御部が端点検出部に対して端点を検出させる。第18制御は、第17制御後に実行される。第18制御では、「第4端点または第5端点」と「第17制御において検出された端点(以下「第6端点」という)」との両方で把持部が変形性薄物を把持するように、制御部が把持部および移動機構を制御する。
上述(1)から(7)のいずれかの変形性薄物展開装置は、懸垂部材をさらに備える。なお、懸垂部材は、単数または複数の水平方向に延びる板状体であってもよいし、単数または複数の水平方向に延びる棒状体であってもよい。懸垂部材には、変形性薄物が懸垂される。そして、制御部は、第1制御と第2制御との間、第3制御と第4制御との間、第5制御と第6制御との間に、把持部によって把持された変形性薄物を懸垂部材に掛けるように把持部および移動機構を制御する。
上述(13)の変形性薄物展開装置は、第1部材および降下機構をさらに備える。降下機構は、第1部材を降下させる。そして、制御部は、変形性薄物が把持部により把持されたまま懸垂部材にかけられた状態で、降下機構に対して、変形性薄物の上方から把持部と懸垂部材との間の空間に第1部材を降下させる。
上述(13)の変形性薄物展開装置において、懸垂部材は、第1懸垂部および第2懸垂部を有する。第2懸垂部は、第1懸垂部と離れて設けられる。また、この変形性薄物展開装置は、降下装置をさらに備える。降下装置は、第1部材および降下機構を有する。降下機構は、第1部材を第1懸垂部および第2懸垂部の上方から第1懸垂部と第2懸垂部との間の空間に降下させる。
上述(13)から(15)のいずれかの変形性薄物展開装置は、第1特徴部分検出部および第2特徴部分検出部をさらに備える。なお、第1特徴部分検出部および第2特徴部分検出部は、2セット用意されるのが好ましい。なお、第1特徴部分検出部および第2特徴部分検出部が2セット用意される場合、第1特徴部分検出部および第2特徴部分検出部は、懸垂部材を挟んで対向するように設置されるのが好ましい。第1特徴部分検出部は、変形性薄物の第1特徴部分を検出する。第2特徴部分検出部は、変形性薄物の第2特徴部分を検出する。そして、制御部は、第7制御後において、第1特徴部分検出部により変形性薄物の第1特徴部分が検出され、且つ、第2特徴部分検出部により変形性薄物の第2特徴部分が検出される場合、第19制御をさらに行う。第19制御では、第2特徴部分を基準とする位置を把持部が把持するように、制御部が把持部および移動機構を制御する。
本発明の他の局面に係る変形性薄物展開方法は、変形性薄物を展開する変形性薄物展開方法であって、第11把持工程、第11端点検出工程、第12把持工程、第12端点検出工程、第13把持工程、第13端点検出工程および第14把持工程を備える。第11把持工程では、変形性薄物が第11点で把持される。第11端点検出工程では、第1把持工程後に、「第11基準線もしくは第11基準点から最も遠い変形性薄物の端点」または「第12基準線もしくは第12基準点から最も近い変形性薄物の端点」が検出される。第12把持工程では、第11端点検出工程後に、第11端点検出工程において検出された端点(以下「第11端点」という)で変形性薄物が把持される。第12端点検出工程では、第12把持工程後に、「第13基準線もしくは第13基準点から最も遠い変形性薄物の端点」または「第14基準線もしくは第14基準点から最も近い変形性薄物の端点」が検出される。第13把持工程では、第12端点検出工程後に、「第11端点」と「第12端点検出工程において検出された端点(以下「第12端点」という)」との両方で変形性薄物が把持される。第13端点検出工程では、第13把持工程後に、「第15基準線もしくは第15基準点から最も遠い変形性薄物の端点」または「第16基準線もしくは第16基準点から最も近い変形性薄物の端点」が検出される。第14把持工程では、第13端点検出工程後に、「第11端点または第12端点」と「第13端点検出工程において検出された端点(以下「第13端点」という)」との両方で変形性薄物が把持される。なお、第11基準線、第13基準線および第15基準線は、同一であってもよいし、異なっていてもよい。また、第11基準点、第13基準点および第15基準点は、同一であってもよいし、異なっていてもよい。また、第12基準線、第14基準線および第16基準線は、同一であってもよいし、異なっていてもよい。また、第12基準点、第14基準点および第16基準点は、同一であってもよいし、異なっていてもよい。
200 載置台(載置領域)
300 展開装置
310 把持部
320 移動機構
401 デジタルスチルカメラ
600 制御部
601 第1端点検出部
602 第2端点検出部
603 第3端点検出部
604 第4端点検出部
605 第5端点検出部
606 第6端点検出部
607 矩形検出部(第1特徴部分検出部)
608 襟検出部(第2特徴部分検出部)
609 移動機構制御部(制御部)
610 把持部制御部(制御部)
700 懸垂部材
710 昇降バー
TS Tシャツ(変形性薄物)
RS ランニングシャツ(変形性薄物)
S1 第1把持工程
S3 第1端点検出工程
S4 第2把持工程
S6 第2端点検出工程
S7 第3把持工程
S9 第3端点検出工程
S10 第4把持工程
本実施形態に係る被折畳物処理装置1は、図1および図2に示されるように、載置台200に乱雑に置かれる被折畳物を展開すると共にその展開された被折畳物を折り畳む装置であって、主として、フレーム100、載置台200、展開装置300、2台のデジタルスチルカメラ401、折畳装置500、展開装置300およびコンピュータ600を備えている。展開装置300は、載置台200に乱雑に置かれる被折畳物を展開する。デジタルスチルカメラ401は、フレーム100の上部に配置される。折畳装置500は、展開装置300により展開された被折畳物を折り畳む。コンピュータ600は、展開装置300、デジタルスチルカメラ401および折畳装置500に通信可能に接続されている。
なお、被折畳物は、例えば、衣類およびタオル類などの布地、フィルム、紙ならびにシートなどであって、その形状は、タオル類のように矩形であってもよいし、Tシャツやランニングシャツのような略矩形であってもよい。
フレーム100は、図2に示されるように、略直方体の枠状に形成されている。そして、その下部には載置台200が設けられている。また、フレーム100の上部には、幅方向(矢印X方向)に沿って桟101が設けられている。そして、その桟101には、載置台200を撮像範囲とする2台のデジタルスチルカメラ401が取り付けられている。また、載置台200の一方端側(矢印X1方向側)および他方端側(矢印X2方向側)のそれぞれの近傍には、前後方向(矢印Y方向)に沿って桟102Rおよび102Lが設けられている。そして、それらの上面には、それぞれ後述するLMガイド材379Rおよび379Lが取り付けられている。また、フレーム100の後方には、折畳装置500を所定の高さ位置で固定するための折畳装置固定フレーム103が設けられている。
載置台200は、被折畳物を載置するために設けられている。この載置台200は、図2に示されるように、X-Y平面(水平面)に延在する水平面を有する。被折畳物は、乱雑な状態で載置台200に載置される。そして、載置台200に載置される被折畳物は、後述する展開装置300によって載置台200の上面に当接しながら移動することによって展開される。すなわち、載置台200は、その上面に被折畳物が引き摺られても、被折畳物を損傷させ難い摩擦抵抗の少ない材料が好ましい。なお、展開装置300による被折畳物の展開方法の詳細については後述する。
展開装置300は、図1に示されるように、載置台200に乱雑に載置される被折畳物を展開する装置であって、把持部310および移動機構320を備えている。把持部310は、被折畳物を把持する。移動機構320は、把持部310を移動させる。この展開装置300は、後述するコンピュータ600と有線または無線により通信可能に接続されている。そして、このコンピュータ600により把持部310および移動機構320の動作が制御される。
把持部310は、図2および図3に示されるように、右チャック部310Rおよび左チャック部310Lを有している。右チャック部310Rは、図4に示されるように、一対のフィンガ311R、リニアアクチュエータ312Rおよびロータリーアクチュエータ313Rを有している。一対のフィンガ311Rは、被折畳物を把持する役割を担う。リニアアクチュエータ312Rは、一対のフィンガ311R間の距離を近接または離間させる。ロータリーアクチュエータ313Rは、鉛直方向(矢印Z方向)を回転軸として、リニアアクチュエータ312Rを矢印R1方向に回転させる。なお、左チャック部310Lの構成は、右チャック部310Rと同様であるので、右チャック部310Rの符号中「R」を「L」に置き換えた符号を用いて、その説明を省略する。なお、図4において、図中の括弧書きは、右チャック部310Rの各部に対応する左チャック部310Lを示したものである。
移動機構320は、図1に示されるように、近接離間機構330、回転移動機構340、幅方向移動機構350、上下方向移動機構360および前後方向移動機構370を含んでいる。近接離間機構330は、右チャック部310Rと左チャック部310Lとを近接または離間させる。回転移動機構340は、鉛直方向(矢印Z方向)を回転軸として近接離間機構330を回転させる。幅方向移動機構350は、回転移動機構340を幅方向(矢印X方向)に移動させる。上下方向移動機構360は、幅方向移動機構350を上下方向(矢印Z方向)に移動させる。前後方向移動機構370は、上下方向移動機構360を前後方向(矢印Y方向)に移動させる。
近接離間機構330は、図3および図5に示されるように、右チャック部移動機構330Rおよび左チャック部移動機構330Lを備えている。右チャック部移動機構330Rは、右チャック部310Rを移動させる。左チャック部移動機構330Lは、左チャック部310Lを移動させる。そして、右チャック部移動機構330Rは、駆動源となるモータ331R、ボールネジ332Rおよびナット333Rを有している。モータ331Rは、正転および逆転が可能なモータである。モータ331Rおよびボールネジ332Rは、後述する回転移動機構340の回転板342に取り付けられている。ボールネジ332Rは、モータ331Rからの駆動力が伝達されることによって回転する。また、ボールネジ332Rは、上述の回転板342の下面において、回転板342の長手方向(矢印K方向(図2参照))に沿って配置されている。ナット333Rは、ボールネジ332Rに螺合する。また、右チャック部310Rは、ナット333Rに固定されている。
回転移動機構340は、鉛直方向(矢印Z方向)を回転軸として、上記した近接離間機構330を回転させるために設けられている。この回転移動機構340は、図2、図3および図5に示されるように、駆動源となるモータ341および回転板342を有している。モータ341は、正転および逆転が可能なモータである。また、モータ341は、後述する幅方向移動機構350のスライド板354に載置されている。また、回転板342は、モータ341の駆動軸に取り付けられる。また、近接離間機構330(モータ331R,331L、ボールネジ332R,332L)は、回転板342に取り付けられている。
幅方向移動機構350は、上述の回転移動機構340を幅方向(矢印X方向)に移動させるために設けられている。この幅方向移動機構350は、図2、図3および図5に示されるように、駆動源となるモータ351、ボールネジ352、ナット353およびスライド板354を有している。モータ351は、正転および逆転が可能なモータである。また、モータ351は、後述する上下方向移動機構360の上下移動板361に取り付けられている。ボールネジ352は、モータ351からの駆動力が伝達されることによって回転する。また、ボールネジ352は、上述の上下移動板361(図2参照)の上面において、上下移動板361の長手方向(矢印X方向)に沿って配置されている。ナット353は、ボールネジ352に螺合する。スライド板354には、上述の回転移動機構340のモータ341が載置される。また、このスライド板354は、ナット353に固定されている。
上下方向移動機構360は、上述の幅方向移動機構350を上下方向(矢印Z方向)に移動させるために設けられており、図2に示されるように、上下移動板361、右昇降ユニット362Rおよび左昇降ユニット362Lを備えている。上下移動板361には、上述の幅方向移動機構350が設けられる。右昇降ユニット362Rは、上下移動板361の一方端側(矢印X1方向側)に配置される。左昇降ユニット362Lは、上下移動板361の他方端側(矢印X2方向側)に配置される。そして、右昇降ユニット362Rおよび左昇降ユニット362Lは、共に後述する前後方向移動機構370の枠体371に固定されている。右昇降ユニット362Rは、図2および図6に示されるように、駆動源となるモータ363R、駆動プーリー364R、従動プーリー365R、ベルト366R、ボールネジ367Rおよびナット368R(図6参照)を有している。モータ363Rは、正転および逆転が可能なモータである。モータ363Rは、後述する前後方向移動機構370の枠体371の上部に固定されている。駆動プーリー364Rは、モータ363Rの駆動軸に取り付けられる。従動プーリー365Rは、駆動プーリー364Rと所定の間隔を隔てて配置される。ベルト366Rは、駆動プーリー364Rおよび従動プーリー365Rに架け渡される。ボールネジ367Rは、従動プーリー365Rの回転軸に取り付けられる。また、ボールネジ367Rは、鉛直方向(矢印Z方向)に沿って配置されている。このボールネジ367Rには、ボールネジ367Rの回転に伴って上下方向(矢印Z方向)に移動するナット368Rが螺合している。ナット368Rは、ボールネジ367Rに螺合する。また、このナット368Rには、上記した上下移動板361が固定されている。
前後方向移動機構370は、上記した上下方向移動機構360を前後方向(矢印Y方向)に移動させるために設けられている。この前後方向移動機構370は、図2、図3および図7に示されるように、枠体371、右前後ユニット372R、左前後ユニット372L、モータ373(図3参照)、駆動プーリー374およびベルト375を有している。枠体371には、上述の上下方向移動機構360が設けられる。モータ373は、正転および逆転が可能なモータであり、フレーム100に取り付けられている。また、このモータ373(図3参照)は、両ユニット372Rおよび372Lの駆動源となる。右前後ユニット372Rは、枠体371の一方端側(矢印X1方向側)の下方に配置される。左前後ユニット372Lは、枠体371の他方端側(矢印X2方向側)の下方に配置される。駆動プーリー374は、モータ373の駆動軸に取り付けられる。ベルト375は、駆動プーリー374および後述する右前後ユニット372Rの前側従動プーリー376Rに架け渡される。
デジタルスチルカメラ401は、被折畳物の第1点P(図12(b)参照)、第1端点P1(図13(e)参照)、第2端点P2(図14(i)参照)、第3端点P3(図16(m)参照)、第4端点P4(図25(o)参照)、第5端点P5(図26(r)参照)および第6端点P6(図27(u)参照)を検出するために設けられている。具体的には、デジタルスチルカメラ401は、載置台200に載置される被折畳物を撮像することによって、被折畳物の撮像データを取得し、取得した撮像データをコンピュータ600に送信する。コンピュータ600は、受信した撮像データに基づいて画像処理を行い、被折畳物の第1点Pおよび第1端点P1~第6端点P6を検出する。
折畳装置500は、上述のフレーム100の折畳装置固定フレーム103に固定されており、図1、図8および図9に示されるように、主に、一対の載置板501、4枚の折り畳み板511~514、二重シャフト回転機構520、載置板間距離調節機構530、載置板前後調節機構540、折畳板スライド機構550および載置板スライド機構560から構成される。なお、以下の説明において、適宜、符号511の折り畳み板を「第1折り畳み板」と称し、符号512の折り畳み板を「第2折り畳み板」と称し、符号513の折り畳み板を「第3折り畳み板」と称し、符号514の折り畳み板を「第4折り畳み板」と称する。以下、折畳装置500の各構成要素について詳述する。
載置板501は、図8に示されるように、幅方向(矢印X方向)に所定の間隔を隔てて配置される一対の略長方形状の板状部材であって、前後方向(矢印Y方向)に延在している。この載置板501には、初期状態において上記した展開装置300によって展開された被折畳物が載置される。
折り畳み板511~514は、図8および図9に示されるように、載置板501に載置された被折畳物を折り畳んでいく役目を担う部材であって、略矩形状を呈し、初期状態において載置板501の載置面に直交するように載置板501の外側に配置されている。
二重シャフト回転機構520は、図8および図9に示されるように、右側回転機構520Rおよび左側回転機構520Lを備えている。右側回転機構520Rは、第1折り畳み板511および第3折り畳み板513を回転させる。左側回転機構520Lは、第2折り畳み板512および第4折り畳み板514を回転させる。そして、右側回転機構520Rと左側回転機構520Lとは、上述の載置板501を挟んで対向して配置されている。この右側回転機構520Rと左側回転機構520Lとの離間距離(幅)は、折畳板スライド機構550によって調節される。
中シャフトプーリー524Rは、図8に示されるように、中シャフト521aRの基端側に嵌め込まれている。また、外シャフトプーリー525Rは、外シャフト521bRの基端側に嵌め込まれている。
載置板間距離調節機構530は、図8および図9に示されるように、主に、ボールネジ531、2つのナット(図示せず)、LMガイド部材532およびボールネジ駆動モータ533から構成されている。なお、ボールネジ駆動モータ533は、ボールネジ531を回転させる駆動源となる。
載置板前後調節機構540は、図8に示されるように、主に、ボールネジ541、ナット(図示せず)、LMガイド部材542およびボールネジ駆動モータ543から構成されている。なお、ボールネジ駆動モータ543は、ボールネジ541を回転させる駆動源となる。
折畳板スライド機構550は、二重シャフト回転機構520の右側回転機構520Rを幅方向(矢印X方向)に移動させることによって、右側回転機構520Rと左側回転機構520Lとの離間距離を調節する。この折畳板スライド機構550は、図9に示されるように、主に、ボールネジ551、ナット552およびボールネジ駆動モータ(図示せず)から構成されている。
載置板スライド機構560は、載置板501、載置板間距離調節機構530および載置板前後調節機構540(以下、載置板ユニットとする)を幅方向(矢印X方向)に移動させることによって、載置板501と左側回転機構520Lとの離間距離を調節する。この載置板スライド機構560は、図9に示されるように、主に、ボールネジ561、ナット562およびボールネジ駆動モータ(図示せず)から構成されている。
コンピュータ600は、被折畳物処理装置1の各部の制御を統括する。コンピュータ600は、主として、ROM、CPU、RAMおよび入出力インターフェイスから構成されている。ROMには、オペレーティングシステム、被折畳物処理装置1の各部を制御するための制御プログラム、および、制御プログラムの実行に必要なデータが格納されている。また、CPUは、ROMに格納される制御プログラムをRAMにロードしたり、ROMから直接実行したりするために設けられている。つまり、CPUが、制御プログラムを実行することにより、被折畳物処理装置1の制御を行うことが可能となる。そして、CPUが処理したデータは、入出力インターフェイスを介して、被折畳物処理装置1の各部(展開装置300、折畳装置500等)へと送信され、CPUの処理に必要なデータは、被折畳物処理装置1の各部(デジタルスチルカメラ401)から入出力インターフェイスを介して受信される。
第1端点検出部601は、把持部310が第1位置Pで把持する被折畳物の第1点Pから最も離れた第1端点P1を検出する。なお、上述の第1点Pは、載置台200に載置される被折畳物の中央位置である。具体的には、第1端点検出部601は、デジタルスチルカメラ401から送信される撮像データに基づいて、第1点Pで把持される被折畳物の平面画像を形成し、その平面画像から第1点Pから最も離れた第1端点P1を検出する(図13(e)参照)。
第2端点検出部602は、把持部310が第1端点P1で把持する被折畳物の第1端点P1から最も離れた第2端点P2を検出する。具体的には、第2端点検出部602は、デジタルスチルカメラ401から送信される撮像データに基づいて、第1端点P1で把持される被折畳物の平面画像を形成し、その平面画像から第1端点P1から最も離れた第2端点P2を検出する(図14(i)参照)。
第3端点検出部603は、把持部310が第1端点P1と第2端点P2との両方で把持する被折畳物の把持に係る端点を結ぶ直線L1から最も離れた第3端点P3を検出する。具体的には、第3端点検出部603は、デジタルスチルカメラ401から送信される撮像データに基づいて、第1端点P1と第2端点P2との両方で把持される被折畳物の平面画像を形成し、その平面画像から直線L1から最も離れた第3端点P3を検出する(図16(m)参照)。
第4端点検出部604は、把持部310が第1端点P1および第2端点P2のいずれかと第3端点P3との両方で把持する被折畳物の把持に係る端点を結ぶ直線L2から最も離れた第4端点P4を検出する。具体的には、第4端点検出部604は、デジタルスチルカメラ401から送信される撮像データに基づいて、第1端点P1および第2端点P2のいずれかと第3端点P3との両方で把持される被折畳物の平面画像を形成し、その平面画像から直線L2から最も離れた第4端点P4を検出する(図25(o)参照)。
第5端点検出部605は、把持部310が第4端点P4で把持する被折畳物の第4端点P4から最も離れた第5端点P5を検出する。具体的には、第5端点検出部605は、デジタルスチルカメラ401から送信される撮像データに基づいて、第4端点P1で把持される被折畳物の平面画像を形成し、その平面画像から第4端点P4から最も離れた第5端点P5を検出する(図26(r)参照)。
第6端点検出部606は、把持部310が第4端点P4と第5端点P5との両方で把持する被折畳物の把持に係る端点を結ぶ直線L3から最も離れた第6端点P6を検出する。具体的には、第6端点検出部606は、デジタルスチルカメラ401から送信される撮像データに基づいて、第4端点P4と第5端点P5との両方で把持される被折畳物の平面画像を形成し、その平面画像から直線L3から最も離れた第6端点P6を検出する(図27(u)参照)。
矩形検出部607は、被折畳物の外形が矩形状となっているか否かを検出する。具体的には、矩形検出部607は、コンピュータ600の記憶部(図示せず)に記憶される矩形状のパターンと、デジタルスチルカメラ401から送信される撮像データに基づいて形成される平面画像から抽出される被折畳物の外形とが、近似するか否かを判断する。そして、矩形検出部607は、上記した矩形状のパターンと被折畳物の外形とが、所定レベル以上近似していると判断すれば、被折畳物が展開されたと判断する(図17(q)および図23(k)参照)。
襟検出部608は、被折畳物の襟部分を検出する。本実施形態に係る襟検出部608は、HOG(Histogram of Oriented Gradients)特徴を用いた画像認識を行うことによって、被折畳物の襟部分を検出する。このHOG特徴を用いた画像認識の手法は、デジタルスチルカメラ401から送信される撮像データに基づいて作成される平面画像の勾配(微分画像)を算出し、その勾配(微分画像)を局所領域毎に勾配方向で区間分割してヒストグラムを取得したものを特徴量とする手法である。
移動機構制御部609は、展開装置300の移動機構320の動作を制御する。すなわち、移動機構制御部609は、近接離間機構330、回転移動機構340、幅方向移動機構350、上下方向移動機構360および前後方向移動機構370の動作を制御する。
移動機構制御部609が近接離間機構330の動作を制御することによって、右チャック部310Rおよび左チャック部310Lのそれぞれが、回転板342の長手方向(矢印K方向)に沿って移動する。これにより、右チャック部310Rと左チャック部310Lとの間の距離を調節することができる。
また、移動機構制御部609が回転移動機構340の動作を制御することによって、右チャック部310Rおよび左チャック部310Lのそれぞれが、モータ341の駆動軸(回転軸方向:矢印Z方向)を中心に公転する。
また、移動機構制御部609が幅方向移動機構350の動作を制御することによって、右チャック部310Rおよび左チャック部310Lが、同時に幅方向(矢印X方向)に沿って移動する。
また、移動機構制御部609が上下方向移動機構360の動作を制御することによって、右チャック部310Rおよび左チャック部310Lが、同時に上下方向(矢印Z方向)に沿って移動する。
また、移動機構制御部609が前後方向移動機構370の動作を制御することによって、右チャック部310Rおよび左チャック部310Lが、同時に前後方向(矢印Y方向)に沿って移動する。
把持部制御部610は、把持部310の右チャック部310Rおよび左チャック部310Lの動作を制御する。
把持部制御部610がロータリーアクチュエータ313R,313L(図4参照)の駆動を制御することによって、フィンガ311Rおよび311Lのそれぞれが、ロータリーアクチュエータ313R,313Lの駆動軸(回転軸方向:矢印Z方向)を中心に自転する。
また、把持部制御部610がリニアアクチュエータ312R,312Lの駆動を制御することによって、フィンガ311Rおよび311Lのそれぞれが、被折畳物の把持またはその解除を行う。
上述の把持部制御部610および移動機構制御部609は、載置台200に載置された乱雑な状態の被折畳物を展開するために、以下に説明する第1制御~第11制御を行うように把持部310および移動機構320の駆動を制御する。
すなわち、把持部制御部610および移動機構制御部609は、把持部310が第1点Pで被折畳物を把持するように把持部310および移動機構320を制御する(第1制御)。
また、把持部制御部610および移動機構制御部609は、第1制御の後、把持部310が第1端点P1で被折畳物を把持するように把持部310および移動機構320を制御する(第2制御)。
また、把持部制御部610および移動機構制御部609は、第2制御の後、把持部310が第1端点P1および第2端点P2の両方で被折畳物を把持するように把持部310および移動機構320を制御する(第3制御)。
また、把持部制御部610および移動機構制御部609は、第3制御の後、把持部310が、第1端点P1および第2端点P2のいずれかと、第3端点P3との両方で被折畳物を把持するように把持部310および移動機構320を制御する(第4制御)。
また、把持部制御部610および移動機構制御部609は、第4制御の後、把持部310が、第4制御において把持されなかった第1端点P1および第2端点P2のいずれかと、第3端点P3との両方で被折畳物を把持するように把持部310および移動機構320を制御する(第5制御)。
また、把持部制御部610および移動機構制御部609は、把持部310が襟部分(第2特徴部分)を基準とする位置を把持するように把持部310および移動機構320を制御する(第6制御)。
また、把持部制御部610および移動機構制御部609は、把持部310が被折畳物を裏返すように把持部310および移動機構320を制御する(第7制御)。
また、把持部制御部610および移動機構制御部609は、第3端点P3と第1端点P1および第2端点P2のいずれかとの両方で把持される被折畳物の下端が載置台200に接触するように把持部310および移動機構320を制御する(第8制御)。
また、把持部制御部610および移動機構制御部609は、第8制御の後、把持部310が第4端点P4で被折畳物を把持するように把持部310および移動機構320を制御する(第9制御)。
また、把持部制御部610および移動機構制御部609は、第9制御の後、把持部310が第4端点P4および第5端点P5の両方で被折畳物を把持するように把持部310および移動機構320を制御する(第10制御)。
また、把持部制御部610および移動機構制御部609は、第10制御の後、把持部310が第4端点P4および第5端点P5のいずれかと第6端点P6との両方で被折畳物を把持するように把持部310および移動機構320を制御する(第11制御)。
折畳装置制御部611は、折畳装置500の動作を制御する。すなわち、折畳装置制御部611は、二重シャフト回転機構520、載置板間距離調節機構530、載置板前後調節機構540、折畳板スライド機構550および載置板スライド機構560の動作を制御する。
具体的には、折畳装置制御部611が二重シャフト回転機構520(右側回転機構520R、左側回転機構520L)の動作を制御することによって、折り畳み板511~514が順次回転する。
また、折畳装置制御部611が載置板間距離調節機構530の動作を制御することによって、一対の載置板501が近接または離間するように移動する。
また、折畳装置制御部611が載置板前後調節機構540の動作を制御することによって、一対の載置板501が前後方向(矢印Y方向)に沿って移動する。
また、折畳装置制御部611が折畳板スライド機構550の動作を制御することによって、右側回転機構520Rが幅方向(矢印X方向)に沿って移動する。
また、折畳装置制御部611が載置板スライド機構560の動作を制御することによって、載置板ユニット(載置板501、載置板間距離調節機構530および載置板前後調節機構540)が幅方向(矢印X方向)に沿って移動する。
次に、図11のフローチャートおよび図12~図18を参照して、展開装置300による被折畳物の一例であるTシャツTSの展開動作について説明する。
次に、図11および図19のフローチャート並びに図20~図28を参照して、展開装置300による被折畳物の一例であるランニングシャツRSの展開動作について説明する。ランニングシャツRSは、上述のTシャツTSとは異なり袖がないことに起因して、襟部分の検出に失敗することがある。その際に、上述したズレ解消ルーチン(ステップS18(図11参照))に突入することになる。
以下、図29~図32を参照して、折畳装置500による被折畳物の折畳動作について説明する。
<折り畳み装置の特徴>
本実施形態に係る被折畳物処理装置1では、被折畳物の第1端点P1および第2端点P2の両方を把持したときに(図15(k)および(l)参照)、第3端点P3を検出して第3端点P3を把持することが可能となる(図16(n)参照)。その結果、被折畳物を広げる吸引装置などを用いることなく、第3端点P3を検知して把持することが可能となるので、簡単な構成で被折畳物を展開することができる。
また、本実施形態に係る被折畳物処理装置1では、第1端点P1および第3端点P3を把持して載置台200に当接させながら移動させても、被折畳物の展開が完了しない場合(ステップS12:No、ステップS32:No)、前の工程において把持部310が把持した端点とは異なる端点の組合せで、被折畳物を把持する(ステップS12a、ステップS32a)。つまり、前の工程において把持部310が把持していた端点とは異なる端点に持ち替えることにより、被折畳物を展開することができる。
また、端点の持ち替えを行うことによって(ステップS12a、ステップS32a)、本実施形態に係る被折畳物処理装置1では、前の工程において把持部310が把持した端点(P1、P3)とは異なる端点の組合せ(P2、P3)で被折畳物を把持することができる。すなわち、被折畳物を繰り返し同じ端点で把持してしまうのを防止することができる。その結果、被折畳物の展開が完了するまでの把持部310による把持回数が増加するのを抑制することができ、被折畳物の展開時間が短縮される。
また、本実施形態に係る被折畳物処理装置1では、第3端点P3を把持する際に、第3端点P3から遠い方の第1端点P1を把持する右チャック部310Rは移動せずに、第3端点P3に近い方の第2端点P2を把持する左チャック部310Lが第3端点P3を把持するように移動する。つまり、第3端点P3を把持しに行く左チャック部310Lの移動距離を短縮することができるので、被折畳物の展開時間が短縮される。
また、本実施形態に係る被折畳物処理装置1では、被折畳物が載置台200に当接しながら移動することによって、被折畳物にその移動方向とは反対方向の摩擦力が発生する。これにより、被折畳物のねじれ及び絡まりを解消することができる。その結果、被折畳物の端点(第1端点P1、第2端点P2および第3端点P3)となる把持部310の移動方向の後端を検出することができる。
また、本実施形態に係る被折畳物処理装置1では、載置台200を備えることにより、被折畳物を載置台200に置いて作業を行うことができる。これにより、第1端点P1と第2端点P2とを把持する第3制御の後、第4制御において第3端点P3を把持する際に、第2端点P2を把持する左チャック部310Lを、第3端点P3を把持する把持部310として利用することができる。すなわち、把持部310(右チャック部310R、左チャック部310L)は、第1端点P1、第2端点P2および第3端点P3の3点を同時に把持する必要が無く、2点を同時に把持可能であればよいので、チャック部の個数が増加するのを防止することができる。その結果、把持部310の構成が簡略化される。
また、本実施形態に係る被折畳物処理装置1では、襟部分を基準とした位置を把持することにより、複数の被折畳物が襟部分を基準とした位置で整列される。これにより、折畳装置500において、円滑に折り畳み作業を行うことが可能となる。
また、本実施形態に係る被折畳物処理装置1では、載置台200に被折畳物を載置した状態で第1特徴部分(矩形状の外形)および第2特徴部分(襟部分)を検出することができる。これにより、被折畳物を吊り下げた状態で第1特徴部分および第2特徴部分を検出する場合に比べて、第1特徴部分および第2特徴部分の認識率が向上する。
また、本実施形態に係る被折畳物処理装置1では、襟部分の検出に失敗した場合に(ステップS13:No)、被折畳物を裏返して襟部分を露出させることができる(ステップS14)。これにより、襟部分を基準とした位置(両肩部分T1,T2)を把持することが可能となり、複数の被折畳物が襟部分を基準とした位置で整列される。
また、本実施形態に係る被折畳物処理装置1は、ランニングシャツRSを裏返しても(ステップS14)、ランニングシャツRSの襟部分を検出できない場合に、ズレ解消ルーチン(ステップS18(ステップS21~S37))を行うことによって、ランニングシャツRSの展開を行う。具体的には、ランニングシャツRSを裏返しても(ステップS14)、ランニングシャツRSの襟部分を検出できない場合に(ステップS16:No)、まず、第3端点P3と第1端点P1との両方で把持されるランニングシャツRSの下端が載置台200に接触するまで把持部310を下降させる(ステップS21)。これにより、ランニングシャツRSの形状が崩れ難い部分(例えば、ランニングシャツの肩口等の縫い目が存在する部分)が、第4端点P4として検出可能となる(ステップS23)。そして、把持部310が、ランニングシャツRSの第4端点P4を把持する(ステップS24)。これにより、把持部310によってランニングシャツRSの角部(形状が崩れ難い部分)が把持されることになる。このとき、ランニングシャツRSの第4端点P4が把持されることにより、ランニングシャツRSの第4端点P4から最も離れた第5端点P5が検出可能となる(ステップS26)。そして、把持部310が、ランニングシャツRSの第4端点P4および第5端点P5の両方を把持する(ステップS27)。これにより、把持部310によってランニングシャツRSの上述した角部(形状が崩れ難い部分)に加えて、その角部の対角の位置に配置される角部が把持されることになる。このとき、ランニングシャツRSの第4端点P4および第5端点P5の両方が把持されることにより、第4端点P4と第5端点P5とを結ぶ直線L3から最も離れた第6端点P6が検出可能となる(ステップS29)。そして、把持部310が、ランニングシャツRSの第4端点P4と第6端点P6とを把持する(ステップS30)。これにより、把持部310によってランニングシャツRSの隣接する2つの角部(形状が崩れ難い部分)が把持されることになり、乱雑に配置されたランニングシャツRSが展開される。
<変形例>
先の実施形態に係る被折畳物処理装置1では、右チャック部310Rおよび左チャック部310Lの2つのチャック部を設ける例について説明したが、本発明はこれに限らず、3つ以上のチャック部を備えていてもよい。3つ以上のチャック部を備える場合、第1端点P1および第2端点P2の両方を把持した状態で、第3端点P3を把持することが可能となる。すなわち、被折畳物を載置台200に置かずに、空中で被折畳物のハンドリングを行うことができる。これにより、載置台200との接触による被折畳物の損傷を防止することができる。また、この場合、載置台200が必要なくなるので、載置台200の設置スペース分だけ被折畳物処理装置1のコンパクト化を図ることができる。
なお、上述の実施形態において、3つ目のチャック部を単に追加しただけでは、空中で被折畳物のハンドリングを行うことができない。空中で被折畳物のハンドリングを行うためには、ロボットハンドを有する6軸ロボットアームを3台設ける等する必要がある。
また、先の実施形態に係る被折畳物処理装置1では、移動機構320をベルトスライダ機構やボールネジ機構で実現する例について説明したが、本発明はこれに限らず、移動機構320をエアシリンダ機構、モータシリンダ機構、電動スライダ機構、リニアスライダ機構、ラックピニオン機構などの機構で実現してもよい。
また、先の実施形態に係る被折畳物処理装置1では、把持部としての右チャック部310Rおよび左チャック部310Lが移動機構320の近接離間機構330に取り付けられる例について説明したが、本発明はこれに限らず、独立した2台以上のロボットアームに把持部としての右チャック部310Rおよび左チャック部310Lが取り付けられてもよい。このような構成を採ることにより、ステップS6(第2端点検出工程)、ステップS9(第3端点検出工程時)、ステップ26(第5端点検出工程)およびステップS29(第6端点検出工程)において、チャック部310R,310LによるTシャツのTS、シャツRSの把持を解除することなく、第2端点P2、第3端点P3、第5端点P5、第6端点P6の検出を行うことできる。
また、先の実施形態に係る被折畳物処理装置1では、2台のデジタルスチルカメラ401により第1点Pおよび第1端点P1~第6端点P6を検出する例について説明したが、本発明はこれに限らず、1台もしくは3台以上のデジタルスチルカメラで第1点Pおよび第1端点P1~第6端点P6を検出してもよい。
また、先の実施形態に係る被折畳物処理装置1では、デジタルスチルカメラ401により撮像された撮像データに基づいて、被折畳物の画像を形成しその画像に画像処理を施すことによって、第1位置Pおよび第1端点P1~第6端点P6を検出したが、本発明はこれに限らず、光センサ等のセンサにより被折畳物の移動方向の後端(被折畳物が検知されなくなった箇所)を検知することによって、第1点Pおよび第1端点P1~第6端点P6を検出してもよい。具体的には、載置台200の上面近傍に発光素子と受光素子とを配置し、把持部310に把持される被折畳物が、発光素子と受光素子との間を通過するように、把持部310および移動機構320を制御する。そして、被折畳物による光の遮断が解除された位置が、被折畳物の第1端点P1~第6端点として検出される。
また、先の実施形態に係る被折畳物処理装置1では、2台のデジタルスチルカメラ401により第1特徴部分(矩形状の外形)および第2特徴部分(襟部分)を検出する例について説明したが、本発明はこれに限らず、1台もしくは3台以上のデジタルスチルカメラで第1特徴部分および第2特徴部分を検出してもよい。
また、先の実施形態に係る被折畳物処理装置1では、デジタルスチルカメラ401により第2特徴部分(襟部分)を検出する例について説明したが、本発明はこれに限らず、赤外線カメラにより被折畳物の第2特徴部分(襟部分)を検出してもよい。赤外線カメラは、載置台200に載置される被折畳物を撮像することによって、被折畳物の透過撮像データを取得し、取得された透過撮像データをコンピュータ600に送信する。コンピュータ600は、受信した透過撮像データに基づいて画像処理を行い、被折畳物の襟部分を検出し、且つ、その襟部分が載置台200に載置される被折畳物のどの位置にあるのか特定する。すなわち、赤外線カメラを用いることにより、他の部分より赤外線の透過量が少ない第2特徴部分(襟部分)の位置を特定することができる。これにより、被折畳物の第2特徴部分を露出させるために被折畳物を裏返す制御(ステップS14およびステップS34)を行わなくても、被折畳物の第2特徴部分を基準する位置を把持することができる。
また、自然光カメラと赤外線カメラとを組み合わせて利用してもよい。この場合、自然光カメラにより被折畳物を撮像した結果、第2特徴部分(襟部分)が検出できなかった場合に、赤外線カメラにより被折畳物を撮像し、第2特徴部分(襟部分)の位置を特定する。これにより、被折畳物を裏返す制御(ステップS14およびステップS34)を行わなくても、被折畳物の第2特徴部分(襟部分)を基準する位置を把持することができる。
また、上述した赤外線カメラの代わりに、CCDカメラを用いることも可能である。具体的には、被折畳物の下部から光線を照射すると共に、被折畳物の第2特徴部分(襟部分)を透過した光量をCCDカメラで検出することにより、被折畳物の第2特徴部分(襟部分)の位置を特定してもよい。
また、先の実施形態に係る被折畳物処理装置1では、X-Y平面に延在する面を有する載置台200を備える例について説明したが、本発明はこれに限らず、図33に示されるような懸垂部材700を備えていてもよい。この懸垂部材700は、図33に示されるように、所定の高さ位置(Z方向位置)に水平に支持される細板状部材、棒状部材等を有する。このような懸垂部材700を利用すれば、被折畳物を懸垂部材700に懸垂させた状態で被折畳物の端点検出を行うことができる。なお、かかる場合、デジタルスチルカメラ401は、懸垂部材700に向かって水平に設置される。
なお、上述のように懸垂部材700に被折畳物を懸垂させた状態で端点検出を行う場合、被折畳物が比較的長いもの、大きいものであると、被折畳物の端点がデジタルスチルカメラ401の撮像領域RPから逸脱してしまうことがある。このような場合、図34および図35に示されるように、昇降バー710を昇降させる昇降機(図示せず)を設置すれば、その問題は解決される。
その一例としては、図34(a)および(b)に示されるように、被折畳物(例えば、TシャツTS、ランニングシャツRS)が把持部310により把持されたまま懸垂部材700にかけられた状態で、昇降機が被折畳物の上方から把持部310と懸垂部材700との間の空間に昇降バー710を降下させる態様がある。また、他の例としては、図35(a)および(b)に示されるように、被折畳物が、平行または略平行に配置される二つの懸垂部材700にかけ渡された状態で、昇降機が被折畳物の上方から二つの懸垂部材700の間の空間に昇降バー710を降下させる態様がある。
なお、上述のいずれの態様においても、昇降機は、コンピュータ600に通信接続されており、コンピュータ600からの指令に基づいて昇降バー710の昇降を行うことが好ましい。なお、コンピュータ600が昇降機に対して昇降バー710を下降させる指令を発するタイミングとしては、例えば、把持部310と懸垂部材700との間または二つの懸垂部材700の間の空間に被折畳物が存在することが検知され、且つ、撮像領域RPにおいて被折畳物の端点が検出されないとき等が挙げられる。なお、「把持部310と懸垂部材700との間または二つの懸垂部材700の間の空間に被折畳物が存在するか否かを検知する」には、把持部310と懸垂部材700との間または二つの懸垂部材700の間の空間の上方または下方において、予めセンサを下方または上方に向けて配置しておけばよい。そして、撮像領域RPに被折畳物の端点が検出されたときに、コンピュータ600が昇降機に対して昇降バー710を上昇させるようにすればよい。
また、このように懸垂部材700を利用して被折畳物の端点検出を行う場合においても、載置台200を利用して被折畳物の端点検出を行う場合と同様に、被折畳物を懸垂部材700に当接させながら被折畳物を移動させることができる。このため、被折畳物のねじれ及び絡まりを解消することができる。その結果、被折畳物の端点(第1端点P1~第6端点P6)となる把持部310の移動方向の後端を検出することができる。
また、平面的に広がる載置台200に比べて、懸垂部材700を設置するのに要する設置スペースが小さくなるので、被折畳物処理装置1のコンパクト化を図ることができる。
また、このように懸垂部材700を利用する態様では、例えば、懸垂部材700の両側にデジタルスチルカメラ401を配置して被折畳物の両側の映像を撮像したり、懸垂部材700の片側にデジタルスチルカメラ401と配置すると共にもう片側に鏡を配置してその1台のデジタルスチルカメラ401により被折畳物の両側の映像を撮像したりすることにより、被折畳物の両側において同時に矩形検出および襟検出を行うことができる。このため、このような態様では、載置台200を利用して被折畳物の端点検出を行う場合とは異なり、被折畳物(例えば、TシャツTS、ランニングシャツRS)を裏返す制御を省くことができる。なお、懸垂部材700の片側にデジタルスチルカメラ401と配置すると共にもう片側に鏡を配置してその1台のデジタルスチルカメラ401により被折畳物の両側の映像を撮像する場合、複数の鏡の多重反射を利用することが現実的である。
また、先の実施形態に係る被折畳物処理装置1では、載置台200を備える例について説明し、先の変形例(H)に係る被折畳物処理装置1では、ポールを備える例について説明したが、本発明では、被折畳物を当接しながら移動させる領域であればよいので、上述の載置台200やポールなどを設ける必要が無く、床(被折畳物処理装置1が載置される面)を載置領域としてもよい。これにより、載置台200やポールを設置するスペース分だけ小さくすることができるので、被折畳物処理装置1のコンパクト化を図ることができる。
また、先の実施形態に係る被折畳物処理装置1では、第1端点検出部601が、デジタルスチルカメラ401から送信される撮像データに基づいて、第1点Pで把持される被折畳物の平面画像を形成し、その平面画像から第1点Pから最も離れた第1端点P1を検出したが、第1端点検出部601が次のようにして第1端点P1を検出するようにしてもよい。
また、先の実施形態に係る被折畳物処理装置1では、第2端点検出部602が、デジタルスチルカメラ401から送信される撮像データに基づいて、第1端点P1で把持される被折畳物の平面画像を形成し、その平面画像から第1端点P1から最も離れた第2端点P2を検出したが、第2端点検出部602が、上述の変形例(J)の(i)および(ii)に示されるように第2端点P2を検出するようにしてもよい。
また、先の実施形態に係る被折畳物処理装置1では、第3端点検出部603が、デジタルスチルカメラ401から送信される撮像データに基づいて、第1端点P1と第2端点P2との両方で把持される被折畳物の平面画像を形成し、その平面画像から直線L1から最も離れた第3端点P3を検出したが、第3端点検出部603が、上述の変形例(J)の(i)および(ii)に示されるように第3端点P3を検出するようにしてもよい。
また、先の実施形態に係る被折畳物処理装置1では、第4端点検出部604が、デジタルスチルカメラ401から送信される撮像データに基づいて、第1端点P1および第2端点P2のいずれかと第3端点P3との両方で把持される被折畳物の平面画像を形成し、その平面画像から直線L2から最も離れた第4端点P4を検出したが、第4端点検出部604が、上述の変形例(J)の(i)および(ii)に示されるように第4端点P4を検出するようにしてもよい。
また、先の実施形態に係る被折畳物処理装置1では、第5端点検出部605が、デジタルスチルカメラ401から送信される撮像データに基づいて、第4端点P1で把持される被折畳物の平面画像を形成し、その平面画像から第4端点P4から最も離れた第5端点P5を検出したが、第5端点検出部605が、上述の変形例(J)の(i)および(ii)に示されるように第5端点P5を検出するようにしてもよい。
また、先の実施形態に係る被折畳物処理装置1では、第6端点検出部606が、デジタルスチルカメラ401から送信される撮像データに基づいて、第4端点P4と第5端点P5との両方で把持される被折畳物の平面画像を形成し、その平面画像から直線L3から最も離れた第6端点P6を検出したが、第6端点検出部606が、上述の変形例(J)の(i)および(ii)に示されるように第6端点P6を検出するようにしてもよい。
Claims (17)
- 変形性薄物を展開する変形性薄物展開装置であって、
前記変形性薄物を把持する把持部と、
前記把持部を移動させる移動機構と、
「第1基準線もしくは第1基準点から最も遠い前記変形性薄物の端点」または「第2基準線もしくは第2基準点から最も近い前記変形性薄物の端点」を検出する端点検出部と、
前記把持部が第1点で前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第1制御と、前記第1制御後に前記端点検出部に対して前記端点を検出させる第2制御と、前記第2制御後に前記第2制御において検出された端点(以下「第1端点」という)で前記把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第3制御と、前記第3制御後に前記端点検出部に対して前記端点を検出させる第4制御と、前記第4制御後に「前記第1端点」と「前記第4制御において検出された端点(以下「第2端点」という)」との両方で前記把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第5制御と、前記第5制御後に前記端点検出部に対して前記端点を検出させる第6制御と、前記第6制御後に「前記第1端点または前記第2端点」と「前記第6制御において検出された端点(以下「第3端点」という)」との両方で前記把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第7制御とを行う制御部と
を備える、変形性薄物展開装置。 - 前記制御部は、前記第5制御後前記第6制御前に、前記第1端点と前記第2端点とを結ぶ直線が略水平となるように前記移動機構を制御する第8制御をさらに行う
請求項1に記載の変形性薄物展開装置。 - 前記制御部は、
前記第2制御において、前記端点検出部に対し、前記第1点から最も遠い前記第1端点を検出させ、
前記第4制御において、前記端点検出部に対し、前記第1端点から最も遠い前記第2端点を検出させ、
前記第6制御において、前記端点検出部に対し、前記第1端点と前記第2端点とを結ぶ直線から最も遠い前記第3端点を検出させる
請求項1または2に記載の変形性薄物展開装置。 - 前記第1基準線は、固定されており、
前記制御部は、
前記第2制御において、前記端点検出部に対し、前記第1基準線から最も遠い前記第1端点を検出させ、
前記第4制御において、前記端点検出部に対し、前記第1基準線から最も遠い前記第2端点を検出させ、
前記第6制御において、前記端点検出部に対し、前記第1基準線から最も遠い前記第3端点を検出させる
請求項1または2に記載の変形性薄物展開装置。 - 前記第2基準線は、固定されており、
前記制御部は、
前記第2制御において、前記端点検出部に対し、前記第2基準線から最も近い前記第1端点を検出させ、
前記第4制御において、前記端点検出部に対し、前記第2基準線から最も近い前記第2端点を検出させ、
前記第6制御において、前記端点検出部に対し、前記第2基準線から最も近い前記第3端点を検出させる
請求項1または2に記載の変形性薄物展開装置。 - 前記制御部は、前記第7制御後に「前記第1端点および前記第2端点のうち前記第7制御において把持されなかった方の端点」と「前記第3端点」との両方で前記把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第9制御をさらに行う
請求項1から5のいずれか1項に記載の変形性薄物展開装置。 - 前記制御部は、前記第7制御において、「前記第1端点および前記第2端点のうち前記第3端点から遠い方の端点」と「前記第3端点」との両方で把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する
請求項1から6のいずれか1項に記載の変形性薄物展開装置。 - 前記変形性薄物を載置する載置領域をさらに備え、
前記制御部は、前記第1制御と前記第2制御との間、前記第3制御と前記第4制御との間、前記第5制御と前記第6制御との間に、前記把持部によって把持された前記変形性薄物が前記載置領域に当接しながら移動するように前記把持部および前記移動機構を制御する
請求項1から7のいずれか1項に記載の変形性薄物展開装置。 - 前記変形性薄物の第1特徴部分を検出する第1特徴部分検出部と、
前記変形性薄物の第2特徴部分を検出する第2特徴部分検出部と
をさらに備え、
前記制御部は、前記第7制御後において、前記第1特徴部分検出部により前記変形性薄物の第1特徴部分が検出され、且つ、前記第2特徴部分検出部により前記変形性薄物の第2特徴部分が検出される場合、前記第2特徴部分を基準とする位置を把持部が把持するように前記把持部および前記移動機構を制御する第10制御をさらに行う
請求項1から8のいずれか1項に記載の変形性薄物展開装置。 - 前記制御部は、前記第7制御後において、前記第1特徴部分検出部により前記変形性薄物の第1特徴部分が検出され、且つ、前記第2特徴部分検出部により前記変形性薄物の第2特徴部分が検出されない場合、前記変形性薄物を裏返すように前記把持部および前記移動機構を制御する第11制御をさらに行う
請求項9に記載の変形性薄物展開装置。 - 前記第2特徴部分検出部は、前記変形性薄物の前記第2特徴部分の位置を特定可能な赤外線カメラを含む
請求項9に記載の変形性薄物展開装置。 - 前記制御部は、前記第11制御後において、前記第2特徴部分検出部により前記第2特徴部分が検出されない場合、前記把持部により「前記第1端点または前記第2端点」と「前記第3端点」との両方で把持される変形性薄物の下端が前記載置領域に接触するように前記把持部および前記移動機構を制御する第12制御と、前記第12制御後に前記端点検出部に対して前記端点を検出させる第13制御と、前記第13制御後に前記第13制御において検出された端点(以下「第4端点」という)で前記把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第14制御と、前記第14制御後に前記端点検出部に対して前記端点を検出させる第15制御と、前記第15制御後に「前記第4端点」と「前記第15制御において検出された端点(以下「第5端点」という)との両方で前記把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第16制御と、前記第16制御後に前記端点検出部に対して前記端点を検出させる第17制御と、前記第17制御後に「前記第4端点または前記第5端点」と「前記第17制御において検出された端点」との両方で前記把持部が前記変形性薄物を把持するように前記把持部および前記移動機構を制御する第18制御をさらに行う
請求項10または11に記載の変形性薄物展開装置。 - 前記変形性薄物を懸垂させる懸垂部材をさらに備え、
前記制御部は、前記第1制御と前記第2制御との間、前記第3制御と前記第4制御との間、前記第5制御と前記第6制御との間に、前記把持部によって把持された前記変形性薄物を前記懸垂部材に掛けるように前記把持部および前記移動機構を制御する
請求項1から7のいずれか1項に記載の変形性薄物展開装置。 - 第1部材と、
前記第1部材を降下させる降下機構をさらに備え、
制御部は、前記変形性薄物が前記把持部により把持されたまま前記懸垂部材にかけられた状態で、前記降下機構に対して、前記変形性薄物の上方から前記把持部と前記懸垂部材との間の空間に前記第1部材を降下させる
請求項13に記載の変形性薄物展開装置。 - 前記懸垂部材は、第1懸垂部と、前記第1懸垂部と離れて設けられる第2懸垂部とを有し、
第1部材と、前記第1部材を前記第1懸垂部および前記第2懸垂部の上方から前記第1懸垂部と前記第2懸垂部との間の空間に降下させる降下機構とを有する降下装置をさらに備える
請求項13に記載の変形性薄物展開装置。 - 前記変形性薄物の第1特徴部分を検出する第1特徴部分検出部と、
前記変形性薄物の第2特徴部分を検出する第2特徴部分検出部と
をさらに備え、
前記制御部は、前記第7制御後において、前記第1特徴部分検出部により前記変形性薄物の第1特徴部分が検出され、且つ、前記第2特徴部分検出部により前記変形性薄物の第2特徴部分が検出される場合、前記第2特徴部分を基準とする位置を前記把持部が把持するように前記把持部および前記移動機構を制御する第19制御をさらに行う
請求項13から15のいずれかに記載の変形性薄物展開装置。 - 変形性薄物を展開する変形性薄物展開方法であって、
前記変形性薄物を第11点で把持する第11把持工程と、
前記第1把持工程後に、「第11基準線もしくは第11基準点から最も遠い前記変形性薄物の端点」または「第12基準線もしくは第12基準点から最も近い前記変形性薄物の端点」を検出する第11端点検出工程と、
前記第11端点検出工程後に、前記第11端点検出工程において検出された前記端点(以下「第11端点」という)で前記変形性薄物を把持する第12把持工程と、
前記第12把持工程後に、「第13基準線もしくは第13基準点から最も遠い前記変形性薄物の端点」または「第14基準線もしくは第14基準点から最も近い前記変形性薄物の端点」を検出する第12端点検出工程と、
前記第12端点検出工程後に、「前記第11端点」と「前記第12端点検出工程において検出された前記端点(以下「第12端点」という)」との両方で前記変形性薄物を把持する第13把持工程と、
前記第13把持工程後に、「第15基準線もしくは第15基準点から最も遠い前記変形性薄物の端点」または「第16基準線もしくは第16基準点から最も近い前記変形性薄物の端点」を検出する第13端点検出工程と、
前記第13端点検出工程後に、「前記第11端点または前記第12端点」と「前記第13端点検出工程において検出された前記端点」との両方で前記変形性薄物を把持する第14把持工程と
を備える、変形性薄物展開方法。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201180057001.4A CN103237937B (zh) | 2010-12-01 | 2011-11-30 | 变形性薄片物展开装置和变形性薄片物展开方法 |
| KR1020137014667A KR101881326B1 (ko) | 2010-12-01 | 2011-11-30 | 변형성 박물 전개 장치 및 변형성 박물 전개 방법 |
| CA2819588A CA2819588C (en) | 2010-12-01 | 2011-11-30 | Deformable thin object spreading device and deformable thin object spreading method |
| EP11845921.3A EP2647757B1 (en) | 2010-12-01 | 2011-11-30 | Device for spreading shapeable thin items and method for spreading shapeable thin items |
| JP2012546698A JP5299934B2 (ja) | 2010-12-01 | 2011-11-30 | 変形性薄物展開装置および変形性薄物展開方法 |
| US13/991,066 US9969041B2 (en) | 2010-12-01 | 2011-11-30 | Deformable thin object spreading device and method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010-268659 | 2010-12-01 | ||
| JP2010268659 | 2010-12-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012073500A1 true WO2012073500A1 (ja) | 2012-06-07 |
Family
ID=46171465
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2011/006689 WO2012073500A1 (ja) | 2010-12-01 | 2011-11-30 | 変形性薄物展開装置および変形性薄物展開方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9969041B2 (ja) |
| EP (1) | EP2647757B1 (ja) |
| JP (1) | JP5299934B2 (ja) |
| KR (1) | KR101881326B1 (ja) |
| CN (1) | CN103237937B (ja) |
| CA (1) | CA2819588C (ja) |
| WO (1) | WO2012073500A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014045801A (ja) * | 2012-08-29 | 2014-03-17 | Kurabo Ind Ltd | 布片の縁部の自動検出方法とその装置、および、該装置を有する布片展開送り装置 |
| WO2019198741A1 (ja) * | 2018-04-12 | 2019-10-17 | 株式会社プレックス | 縁把持装置およびそれを備えた布類自動展開機 |
| WO2020067413A1 (ja) * | 2018-09-28 | 2020-04-02 | seven dreamers laboratories株式会社 | 被処理物の処理装置 |
| US10718084B2 (en) | 2014-06-24 | 2020-07-21 | Seven Dreamers Laboratories, Inc. | Processing apparatus for processing subject |
| JP2020110874A (ja) * | 2019-01-11 | 2020-07-27 | 倉敷紡績株式会社 | 柔軟物の積み重ね方法、衣服の折り畳みおよび積み重ね方法、ならびにロボットシステム |
| JPWO2020067413A1 (ja) * | 2019-03-29 | 2021-08-30 | パナソニック株式会社 | 被処理物の処理装置 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9063039B1 (en) * | 2012-09-19 | 2015-06-23 | The United States of America as by the Secretary of the Army | Soft body armor durability tester |
| EP3306552A4 (en) | 2015-05-29 | 2019-01-16 | Seven Dreamers Laboratories Inc. | SERVER DEVICE, DATA PROVIDING METHOD, PROGRAM, AND DATA PROCESSING SYSTEM |
| JP7007909B2 (ja) * | 2015-05-29 | 2022-01-25 | SBI Ventures Two株式会社 | 被処理物の処理装置 |
| CN104924141A (zh) * | 2015-06-01 | 2015-09-23 | 中信戴卡股份有限公司 | 一种车轮定位装置 |
| CN105002715B (zh) * | 2015-06-10 | 2017-03-29 | 上海工程技术大学 | 一种被褥自动折叠机 |
| DE102015016230A1 (de) * | 2015-12-16 | 2017-07-06 | Herbert Kannengiesser Gmbh | Vorrichtung zum Zuführen von Wäschestücken zu einer Mangel |
| JP6878117B2 (ja) * | 2017-04-25 | 2021-05-26 | 川崎重工業株式会社 | シート搬送装置及びシート搬送方法 |
| EP3695046A1 (en) * | 2017-10-13 | 2020-08-19 | Jensen Denmark A/S | A machine for the processing of linen items in an industrial laundry, a method for operating the machine, and an industrial laundry |
| JP6806045B2 (ja) * | 2017-12-11 | 2021-01-06 | 株式会社ダイフク | 物品搬送設備 |
| JP7136554B2 (ja) * | 2017-12-18 | 2022-09-13 | 国立大学法人信州大学 | 把持装置、学習装置、プログラム、把持システム、及び学習方法 |
| JP2019198490A (ja) * | 2018-05-16 | 2019-11-21 | 株式会社アスティナ | 衣類処理システム、および衣類処理方法 |
| CN109015671A (zh) * | 2018-07-25 | 2018-12-18 | 苏州冠盟自动化科技有限公司 | 一种可升降并移动的机械手 |
| CN109778515B (zh) * | 2018-12-29 | 2022-03-11 | 廖田新 | 一种衣服的熨烫方法和熨烫设备 |
| CN109832701B (zh) * | 2018-12-29 | 2021-08-10 | 廖田新 | 一种裤子的熨烫方法和熨烫设备 |
| CN110407010B (zh) * | 2019-06-25 | 2021-03-19 | 安吉八塔机器人有限公司 | 一种适用于弹性材料的搬运与纠偏系统及其方法 |
| DE102020001961A1 (de) * | 2020-03-27 | 2021-09-30 | Herbert Kannegiesser Gmbh | Verfahren zum Ergreifen textiler Gegenstände |
| US11866866B2 (en) | 2020-05-27 | 2024-01-09 | Monotony.ai, Inc. | Autonomous laundry washing and drying systems and methods |
| EP4157595A1 (en) * | 2020-05-28 | 2023-04-05 | Monotony.AI, Inc. | Robotic laundry devices and methods of use |
| US11486084B2 (en) | 2020-07-01 | 2022-11-01 | Monotony.ai, Inc. | Autonomous laudry folding devices, systems, and methods of use |
| CA3186474A1 (en) | 2020-07-01 | 2022-01-06 | Monotony.ai, Inc. | Autonomous laundry folding device and method |
| CN113279231A (zh) * | 2021-05-31 | 2021-08-20 | 武汉科技大学 | 一种自动叠衣收纳装置及方法 |
| CN114055410B (zh) * | 2021-11-22 | 2022-08-30 | 无锡鸿君环保科技有限公司 | 离心高速旋转雾化器的拆解设备及其方法 |
| CN114850922B (zh) * | 2022-06-16 | 2023-05-30 | 鑫磊压缩机股份有限公司 | 一种压缩机排气座加工工装 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02131888A (ja) * | 1988-11-14 | 1990-05-21 | Agency Of Ind Science & Technol | 布地ハンドリング装置 |
| JP2002321869A (ja) | 2001-04-25 | 2002-11-08 | Hakko Shokai:Kk | タオル等の折り畳み方法及び装置 |
| JP2004089473A (ja) * | 2002-08-30 | 2004-03-25 | Yozo Maejima | 布製品の展開方法 |
| JP2010000561A (ja) * | 2008-06-19 | 2010-01-07 | Ist Corp | 変形性薄物展開装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0372320B1 (en) * | 1988-12-02 | 1996-02-28 | Mitsubishi Jukogyo Kabushiki Kaisha | Method and apparatus for spreading sheets |
| WO1992017633A1 (en) * | 1991-03-27 | 1992-10-15 | Chicago Dryer Company | Folder construction |
| SE505924C2 (sv) * | 1992-04-15 | 1997-10-27 | Tage Bjoerkloef | Anordning för att automatiskt bringa mjuka, sladdriga platta alster från ett obestämt läge till ett känt läge |
| EP0751251B1 (en) * | 1995-01-10 | 2002-05-15 | Tokai Co., Ltd. | Method of and apparatus for fully automatically finishing laundry of square cloth |
| JP4268747B2 (ja) * | 2000-10-10 | 2009-05-27 | 株式会社プレックス | 矩形布片の展開方法及び展開装置 |
| US6826856B1 (en) * | 2003-08-06 | 2004-12-07 | Finishtech Ltd. | Laundry article spreader apparatus and method |
| US6883258B2 (en) * | 2003-08-06 | 2005-04-26 | Finish Tech., Ltd. | Spreader apparatus and method for articles of laundry |
| EP1690976A1 (de) * | 2005-02-15 | 2006-08-16 | Jensen AG Burgdorf | Verfahren zum Ausrichten eines Wäschestücks und Einrichtung zur Durchführung des Verfahrens |
| US7555857B2 (en) * | 2006-09-13 | 2009-07-07 | Mccabe Stanley G | Article of laundry spreader and stacker |
| JP5147017B2 (ja) * | 2006-09-14 | 2013-02-20 | セブン ドリーマーズ ラボラトリーズ,インコーポレイテッド | 折り畳み装置、運搬装置、折り畳み方法および載置装置 |
-
2011
- 2011-11-30 WO PCT/JP2011/006689 patent/WO2012073500A1/ja active Application Filing
- 2011-11-30 KR KR1020137014667A patent/KR101881326B1/ko active IP Right Grant
- 2011-11-30 CA CA2819588A patent/CA2819588C/en active Active
- 2011-11-30 EP EP11845921.3A patent/EP2647757B1/en active Active
- 2011-11-30 JP JP2012546698A patent/JP5299934B2/ja active Active
- 2011-11-30 CN CN201180057001.4A patent/CN103237937B/zh active Active
- 2011-11-30 US US13/991,066 patent/US9969041B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02131888A (ja) * | 1988-11-14 | 1990-05-21 | Agency Of Ind Science & Technol | 布地ハンドリング装置 |
| JP2002321869A (ja) | 2001-04-25 | 2002-11-08 | Hakko Shokai:Kk | タオル等の折り畳み方法及び装置 |
| JP2004089473A (ja) * | 2002-08-30 | 2004-03-25 | Yozo Maejima | 布製品の展開方法 |
| JP2010000561A (ja) * | 2008-06-19 | 2010-01-07 | Ist Corp | 変形性薄物展開装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014045801A (ja) * | 2012-08-29 | 2014-03-17 | Kurabo Ind Ltd | 布片の縁部の自動検出方法とその装置、および、該装置を有する布片展開送り装置 |
| US10718084B2 (en) | 2014-06-24 | 2020-07-21 | Seven Dreamers Laboratories, Inc. | Processing apparatus for processing subject |
| WO2019198741A1 (ja) * | 2018-04-12 | 2019-10-17 | 株式会社プレックス | 縁把持装置およびそれを備えた布類自動展開機 |
| JP2019183334A (ja) * | 2018-04-12 | 2019-10-24 | 株式会社プレックス | 縁把持装置およびそれを備えた布類自動展開機 |
| CN111936688A (zh) * | 2018-04-12 | 2020-11-13 | 普雷克斯株式会社 | 边缘握持装置及具备该边缘握持装置的布料自动展开机 |
| US11359317B2 (en) | 2018-04-12 | 2022-06-14 | Purex Co., Ltd. | Edge clamping device and automatic cloth spreading machine including the same |
| JP7125853B2 (ja) | 2018-04-12 | 2022-08-25 | 株式会社プレックス | 縁把持装置およびそれを備えた布類自動展開機 |
| CN111936688B (zh) * | 2018-04-12 | 2023-10-20 | 普雷克斯株式会社 | 边缘握持装置及具备该边缘握持装置的布料自动展开机 |
| WO2020067413A1 (ja) * | 2018-09-28 | 2020-04-02 | seven dreamers laboratories株式会社 | 被処理物の処理装置 |
| JP2020110874A (ja) * | 2019-01-11 | 2020-07-27 | 倉敷紡績株式会社 | 柔軟物の積み重ね方法、衣服の折り畳みおよび積み重ね方法、ならびにロボットシステム |
| JPWO2020067413A1 (ja) * | 2019-03-29 | 2021-08-30 | パナソニック株式会社 | 被処理物の処理装置 |
| JP7145964B2 (ja) | 2019-03-29 | 2022-10-03 | パナソニックホールディングス株式会社 | 被処理物の処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2647757A4 (en) | 2015-07-29 |
| CN103237937B (zh) | 2017-02-15 |
| CN103237937A (zh) | 2013-08-07 |
| KR101881326B1 (ko) | 2018-08-24 |
| EP2647757B1 (en) | 2019-04-17 |
| JPWO2012073500A1 (ja) | 2014-05-19 |
| KR20140002664A (ko) | 2014-01-08 |
| CA2819588C (en) | 2019-09-17 |
| US9969041B2 (en) | 2018-05-15 |
| EP2647757A1 (en) | 2013-10-09 |
| JP5299934B2 (ja) | 2013-09-25 |
| US20130249157A1 (en) | 2013-09-26 |
| CA2819588A1 (en) | 2012-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5299934B2 (ja) | 変形性薄物展開装置および変形性薄物展開方法 | |
| JP7007909B2 (ja) | 被処理物の処理装置 | |
| JP6951073B2 (ja) | 被処理物の処理装置 | |
| WO2016017090A1 (ja) | 布類展開装置 | |
| JP2019092999A (ja) | 衣服折畳装置および衣服折畳方法 | |
| JP4834767B2 (ja) | 把持装置、布地処理ロボットおよび布地処理システム | |
| JP4808065B2 (ja) | 布類展張搬送機 | |
| JP6912812B2 (ja) | 折り畳みユニット、および折り畳み方法 | |
| JP2009275330A (ja) | 布類展張搬送方法及び布類展張搬送機 | |
| JP7064841B2 (ja) | 布類展開装置 | |
| WO2019198741A1 (ja) | 縁把持装置およびそれを備えた布類自動展開機 | |
| JP2008121142A (ja) | 布類展張搬送機 | |
| JP6704362B2 (ja) | 布片把持装置用カメラシステム | |
| JP6981831B2 (ja) | 布類中継機および布類処理装置 | |
| JP2016008109A (ja) | 搬送装置、およびそれを用いた被処理物処理システム | |
| JP2016007323A (ja) | 保持システム | |
| Tam | Unfolding and Hanging Clothes Using a Special Hanger and a Robotic Arm | |
| JP2020054473A (ja) | 被処理物の処理装置 | |
| JP2019092998A (ja) | 袖付衣服の展開方法、袖付衣服の折畳方法、袖付衣服の展開装置、および、袖付衣服の折畳装置 | |
| JP6827281B2 (ja) | 布類投入機および布類展開装置 | |
| JP2008119281A (ja) | 衣類整形供給装置 | |
| JP2023546747A (ja) | 柔軟で平坦なワークピースを位置決めするための位置決め装置および方法 | |
| JP2008115498A (ja) | 包布展張方法及び包布展張機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 11845921 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2012546698 Country of ref document: JP Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2819588 Country of ref document: CA |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13991066 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 20137014667 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011845921 Country of ref document: EP |