WO2010123097A1 - ノズル回転機構およびそれを備える塗布装置 - Google Patents
ノズル回転機構およびそれを備える塗布装置 Download PDFInfo
- Publication number
- WO2010123097A1 WO2010123097A1 PCT/JP2010/057229 JP2010057229W WO2010123097A1 WO 2010123097 A1 WO2010123097 A1 WO 2010123097A1 JP 2010057229 W JP2010057229 W JP 2010057229W WO 2010123097 A1 WO2010123097 A1 WO 2010123097A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- nozzle
- rotation
- nozzle unit
- liquid material
- rotation mechanism
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B3/00—Spraying or sprinkling apparatus with moving outlet elements or moving deflecting elements
- B05B3/02—Spraying or sprinkling apparatus with moving outlet elements or moving deflecting elements with rotating elements
- B05B3/025—Rotational joints
- B05B3/026—Rotational joints the fluid passing axially from one joint element to another
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B9/00—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour
- B05B9/03—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material
- B05B9/04—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material with pressurised or compressible container; with pump
- B05B9/0403—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material with pressurised or compressible container; with pump with pumps for liquids or other fluent material
- B05B9/0409—Spraying apparatus for discharge of liquids or other fluent material, without essentially mixing with gas or vapour characterised by means for supplying liquid or other fluent material with pressurised or compressible container; with pump with pumps for liquids or other fluent material the pumps being driven by a hydraulic or a pneumatic fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B13/00—Machines or plants for applying liquids or other fluent materials to surfaces of objects or other work by spraying, not covered by groups B05B1/00 - B05B11/00
- B05B13/02—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work
- B05B13/04—Means for supporting work; Arrangement or mounting of spray heads; Adaptation or arrangement of means for feeding work the spray heads being moved during spraying operation
- B05B13/0447—Installation or apparatus for applying liquid or other fluent material to conveyed separate articles
- B05B13/0457—Installation or apparatus for applying liquid or other fluent material to conveyed separate articles specially designed for applying liquid or other fluent material to 3D-surfaces of the articles, e.g. by using several moving spray heads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05B—SPRAYING APPARATUS; ATOMISING APPARATUS; NOZZLES
- B05B3/00—Spraying or sprinkling apparatus with moving outlet elements or moving deflecting elements
- B05B3/02—Spraying or sprinkling apparatus with moving outlet elements or moving deflecting elements with rotating elements
- B05B3/12—Spraying or sprinkling apparatus with moving outlet elements or moving deflecting elements with rotating elements with spray booms or the like rotating around an axis by means independent of the liquid or other fluent material discharged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B05—SPRAYING OR ATOMISING IN GENERAL; APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C—APPARATUS FOR APPLYING FLUENT MATERIALS TO SURFACES, IN GENERAL
- B05C5/00—Apparatus in which liquid or other fluent material is projected, poured or allowed to flow on to the surface of the work
- B05C5/02—Apparatus in which liquid or other fluent material is projected, poured or allowed to flow on to the surface of the work the liquid or other fluent material being discharged through an outlet orifice by pressure, e.g. from an outlet device in contact or almost in contact, with the work
- B05C5/0208—Apparatus in which liquid or other fluent material is projected, poured or allowed to flow on to the surface of the work the liquid or other fluent material being discharged through an outlet orifice by pressure, e.g. from an outlet device in contact or almost in contact, with the work for applying liquid or other fluent material to separate articles
- B05C5/0212—Apparatus in which liquid or other fluent material is projected, poured or allowed to flow on to the surface of the work the liquid or other fluent material being discharged through an outlet orifice by pressure, e.g. from an outlet device in contact or almost in contact, with the work for applying liquid or other fluent material to separate articles only at particular parts of the articles
- B05C5/0216—Apparatus in which liquid or other fluent material is projected, poured or allowed to flow on to the surface of the work the liquid or other fluent material being discharged through an outlet orifice by pressure, e.g. from an outlet device in contact or almost in contact, with the work for applying liquid or other fluent material to separate articles only at particular parts of the articles by relative movement of article and outlet according to a predetermined path
Definitions
- the present invention relates to a nozzle rotation mechanism and a coating apparatus including the same, for example, a nozzle unit in which a flow path is provided in a motor hollow portion, and a nozzle unit and a nozzle attached to the nozzle unit rotate by rotation of the motor
- the present invention relates to a rotation mechanism and a coating apparatus including the rotation mechanism.
- Application is performed by providing a rotation mechanism that changes the direction of the outlet.
- a fixing portion that can fix the box-shaped component, and the fixing portion can be moved horizontally and vertically.
- a coating device including a control unit is disclosed.
- a material application apparatus that applies a material along a predetermined trajectory on the application surface from the nozzle tip discharge port while relatively moving the application surface of the workpiece and the nozzle
- a nozzle having a front end discharge port provided with a contour in which the width in the direction in which the front end crosses the trajectory is wider than the rear end is controlled to rotate so that the front end precedes the rear end over almost the entire trajectory.
- the nozzle rotation mechanism of the apparatus of Patent Document 1 has a complicated and large-scale structure in which a motor is provided separately from the syringe holding portion and the rotation of the motor is transmitted by a belt.
- the belt is slippery, it is difficult to accurately position the discharge port in the rotational direction, and the load applied to the motor is large due to the configuration in which the syringe rotates.
- the tube connected to the syringe is twisted to prevent a smooth rotation operation, and the tube is rapidly deteriorated by repeatedly receiving the twisting operation. It was.
- the apparatus of Patent Document 2 rotates a nozzle provided in the vertical direction, which has a devised shape at the tip discharge port, around the axis of the syringe by a rotation mechanism, and also moves the syringe relative to the workpiece by the XYZ axis. Relative movement in the direction.
- the syringe including the nozzle and the material housing body is attached under the rotating mechanism including the motor unit, the nozzle and the material housing body must be removed together when the material is replenished. After replenishing the material, the position of the nozzle tip sometimes shifted.
- the tube is wound around the syringe, so that it is considered necessary to reversely rotate the syringe every time the workpiece is replaced. Further, since the motor part is away from the nozzle tip, the rotation axis is likely to be shaken, and accurate positioning of the nozzle tip is difficult.
- an object of the present invention is to provide a nozzle rotating mechanism capable of accurately positioning the rotational direction position of the nozzle tip with a small and simple structure, and a coating apparatus including the nozzle rotating mechanism.
- the inventor attaches the nozzle unit directly and detachably to the rotating device in order to realize a mechanism for rotating only the nozzle unit, which is the minimum component including the nozzle, without using a power transmission means such as a belt. Based on this basic idea, the present invention was created. That is,
- a nozzle having a discharge port for discharging a liquid material a nozzle unit having a flow path communicating with the nozzle and the liquid material supply source, a base member, and the base member are arranged to rotate the nozzle unit.
- a rotating device for rotating the nozzle wherein the nozzle is disposed in the nozzle unit such that the center line (207) of the nozzle outlet and the rotation axis center line (306) of the nozzle unit form an angle.
- the nozzle rotating mechanism is characterized in that the nozzle unit is disposed and detachably attached to a rotating device.
- the rotating device includes a motor having a hollow portion extending through the rotation axis center line (306) in the axial direction and fitted with a nozzle unit. It is characterized by comprising.
- the flow path of the nozzle unit is provided on the supply side provided coaxially with the rotation axis center line (306) at the end on the side communicating with the liquid material supply source.
- An opening (210) is provided.
- a connection pipe (501) connected to the supply side opening, and a connection pipe fixing for fixing the connection pipe disposed on the base member apart from the nozzle unit A member (502) is provided.
- the fifth invention is characterized in that, in the fourth invention, the connecting pipe (501) is substantially linear and includes a protrusion (503) for directly connecting the liquid material supply source.
- a rotational position detection mechanism configured to include a detection member disposed in the nozzle unit and a sensor portion provided in the base member. It is characterized by providing.
- the detection member is disposed at a position facing the nozzle across the rotation axis center line (306).
- An eighth invention is characterized in that, in any one of the first to seventh inventions, the nozzle is arranged so that the discharge port is located on the inner lower side of the outer periphery of the nozzle unit.
- a ninth invention includes the nozzle rotation mechanism according to any one of the first to eighth inventions, a relative movement mechanism that relatively moves the nozzle rotation mechanism and the application target, a liquid material supply source, and a control device. It is a coating device.
- the tube portion since only the nozzle unit rotates, for example, even when the tube is connected to a syringe, the tube portion does not rotate. There is no deterioration of the tube. Further, since only the lightweight nozzle unit is rotated, the load applied to the drive system such as a motor is small, and the head unit can be reduced in size and weight by arranging the drive system and the nozzle unit linearly. In addition, since the drive system directly rotates the nozzle unit mounted on it, there is no displacement due to slipping of the belt, etc., and the position of the discharge port in the rotational direction can be accurately positioned, and no power transmission mechanism is used in the middle. It is also energy efficient.
- the nozzle position does not shift when the material is replenished. Furthermore, by providing a rotation position detection mechanism that detects the reference position of the nozzle unit, the reference position of the nozzle unit is accurately determined, so that the discharge port can be accurately positioned in the rotation direction, and only the application program is changed. Thus, it is possible to easily cope with a change in the application pattern or the type of the object to be applied.
- FIG. 3 is a sectional view of the nozzle rotating mechanism according to the present invention (AA sectional view of FIG. 2). It is explanatory drawing explaining operation
- 1 is a schematic perspective view of a coating apparatus according to Example 1.
- FIG. It is explanatory drawing explaining the operation
- FIG. 6 is a cross-sectional view of a nozzle rotation mechanism according to Embodiment 2.
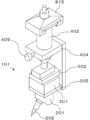
- FIG. 2 A schematic perspective view of a nozzle rotation mechanism 101 according to the present invention is shown in FIG. 2 is a front view
- FIG. 3 is a side view
- FIG. 4 is a bottom view
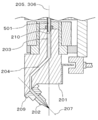
- FIG. 5 is a cross-sectional view taken along line AA in FIG. This will be described with reference to these figures.
- the nozzle rotation mechanism 101 includes a nozzle 202 that discharges a liquid material 901, a nozzle unit 201 that is equipped with the nozzle 202 and has flow paths (203, 204) therein, and a motor 301 that rotates the nozzle unit 201.
- the liquid material supply source 401 that stores the liquid material 901 and supplies the liquid material 901 to the nozzle unit 201 by the pressure from the pressurization source, and the side opposite to the side where the nozzle 202 of the nozzle unit 201 is installed
- a connection pipe 501 that communicates the flow path 203 and the liquid material supply source 401 and a rotation position detection mechanism 601 that detects a reference position in the rotation direction 808 of the nozzle unit 201 are provided.
- the nozzle unit 201 has a flow path (203, 204) in which one end communicates with the nozzle 202 that discharges the liquid material 901 and the other end communicates with the connection pipe 501 connected to the liquid material supply source 401.
- This flow path includes two parts, a first flow path 203 communicating with the connection pipe 501 and a second flow path 204 communicating with the nozzle 202.
- a seal member 208 is disposed at a connection portion of the first flow path 203 with the connection pipe 501 to prevent the liquid material 901 from leaking from the connection pipe 501 side.
- the nozzle unit 201 includes a nozzle mounting portion 209 on the second flow path 204 side, and the second flow path 204 communicates with the discharge port of the nozzle 202 via the nozzle mounting section 209.
- the nozzle 202 is disposed in the nozzle unit 201 so that the center line 207 of the nozzle including the discharge port and the rotation axis center line 306 form an angle (not concentric). It is rotated to draw a circle at the center.
- the motor 301 has a hollow portion 302 that extends through the center of the rotating portion 303.
- the rotating portion 303 is surrounded by a case 304 having a substantially rectangular parallelepiped shape except for two open surfaces of the hollow portion 302.
- the motor 301 is fixed by fixing the case 304.
- the motor 301 is referred to as a hollow shaft motor.
- the liquid material supply source 401 includes a container (syringe) 402 for storing the liquid material 901 and a pressure source (not shown) connected to the container. Due to the pressure from the pressure source, the liquid material 901 flows from the syringe 402 through the connection pipe 501 to the flow path (203, 204), and is discharged from the nozzle 202.
- the liquid material supply source 401 is not limited to the syringe 402 as in the present embodiment, and may have other configurations.
- a liquid feed tube can be connected to the connection pipe 501 from a tank that stores the liquid material 901 installed at a position away from the nozzle rotating mechanism 101, and the liquid material 901 can be supplied by pressure from a pressurizing source. is there.
- connection pipe 501 is a tubular member that allows the liquid material supply source 401 and the nozzle unit 201 to communicate with each other, and is fixed by a connection pipe fixing member 502 so as not to rotate with the rotation of the hollow shaft motor 301.
- One end of the nozzle unit 201 is inserted until the seal member 208 is disposed, and the other end extends so as to protrude from the upper surface of the connection pipe fixing member 502 to form a protruding portion 503.
- the protrusion 503 is formed in a shape that matches the connection port 403 of the liquid material supply source 401.
- the rotation detection mechanism 601 includes a sensor unit provided on the base plate 701 and a detection member provided on the nozzle unit 201.
- the sensor unit is configured by the photosensor 602 and the detection member is configured by the light shielding plate 603, but it is needless to say that the present invention is not limited to this combination.
- the light shielding plate 603 is a plate-like member having an L-shaped cross section in the vertical direction. The light shielding plate 603 is attached so as to face the nozzle 202 across the motor rotation axis center line 306 and the protruding portion 604 of the light shielding plate 603 extends from the side surface of the nozzle unit 201 to the outside in a substantially horizontal direction.
- the overhang portion 604 extends to a position where the optical axis of the photosensor 602 is blocked.
- the photosensor 602 has a substantially “U” shape, and the recess constitutes the detection unit 606.
- the overhanging portion 604 can pass through the concave portion, and is attached in such a direction and height that they do not collide.
- a portion in which the first flow path 203 is provided is fitted in the hollow portion 302 of the hollow shaft motor 301, and is detachably attached to the hollow portion 302 with a fastening member such as a screw (not shown).
- a fastening member such as a screw (not shown).
- the first flow path center line 205 in the nozzle unit 201 and the rotation axis center line 306 of the hollow shaft motor coincide with each other, so that the connecting pipe 501 even if the nozzle unit 201 rotates.
- the position of the supply-side opening 210 of the first flow path 203 communicating with the air does not change.
- the straight connection pipe 501 that is fixed and does not rotate can be inserted into the first flow path 203, and as a result, the nozzle unit 201, the hollow shaft motor 301, and the syringe 402 can be arranged linearly. .
- the orientation of the nozzle 202 is not vertically downward, but is attached with an angle with respect to the motor rotation axis center line 306.
- the second flow path 204 in the nozzle unit 201 is inclined with respect to the motor rotation axis center line 306.
- the nozzle itself is not specially manufactured, for example, in the shape of a " ⁇ ", and the nozzle used for general application work can be used as it is. This is advantageous in terms of component compatibility.
- the nozzle tip position is determined only by attaching the nozzle 202, positioning can be performed more easily than the case where the nozzle itself is bent as described above.
- the mounting angle of the nozzle 202 and the inclination or bending of the flow path 204 can be arbitrarily changed according to the shape of the application object 814 and a desired application state. In that case, it can respond easily by changing only the nozzle unit 201.
- the mounting position of the nozzle 202 in the height direction is preferably below the mounting position of the detection mechanism 601 so as not to interfere with the detection mechanism 601 when rotated. By doing so, the nozzle unit 201 can rotate 360 degrees or more.
- the discharge port is configured to be located on the inner lower side of the outer periphery of the nozzle unit 201, the movement distance of the discharge port is shortened compared to the case where the discharge port is located on the outer lower side of the outer edge of the nozzle unit. can do.
- the hollow shaft motor 301 fitted with the nozzle unit 201 is fixed to the base plate 701 by fixing a case 304 surrounding the rotating portion 303 with a motor fixing member 305. Therefore, when the rotating part 303 of the hollow shaft motor 301 rotates, only the nozzle unit 201 and the nozzle 202 attached thereto rotate.
- connection pipe 501 has a tip part inserted into the first flow path 203 of the nozzle unit 201 fitted in the fixed hollow shaft motor 301.
- the connecting pipe fixed to the base plate 701 is not rotated with the rotation of the hollow shaft motor 301, and the connecting pipe center line 504 and the first flow path center line 205 are positioned on a straight line so as not to be displaced.
- the fixing member 502 is firmly fixed.
- the connecting pipe fixing member 502 is provided with a slight gap 505 between the hollow shaft motor 301 and the nozzle unit 201 in the lower part. This is because, if they are brought into contact with each other, resistance to motor rotation or cutting scraps is generated mainly due to friction.
- a protruding portion 503 formed in a shape that fits the connecting port 403 of the liquid material supply source 401 provided at the end of the connecting pipe 501 protrudes. Since the connection pipe 501 is detachable, the connection pipe 501 having various shapes of connection ports can be easily replaced, and can correspond to various forms of liquid material supply sources 401.
- the storage container 402 (syringe) that forms part of the liquid material supply source 401 is connected to the protruding portion 503 above the connecting pipe fixing member 502. And it is supported by the container holding member 404 fixed to the base board 701 above the connection part.
- An adjustment screw 405 is attached to the container holding member 404, and the syringe 402 can be detachably fixed by the adjustment screw 405. Since there are no mechanisms or members other than the container holding member 404 around the syringe 402, there is no obstruction when working on the syringe 402, so that the work can be performed smoothly. In addition, since the syringe 402 can be easily attached and detached by attaching and detaching the connection port 403, the liquid material can be replenished without affecting the nozzle position.
- the adapter tube 815 is attached to the syringe 402, and a compressed gas is supplied from a pressure source (not shown). Due to the pressure from the pressure source, the liquid material 901 flows from the syringe 402 to the flow path (203, 204) and is discharged from the nozzle 202. Since the syringe 402 does not rotate with the rotation of the nozzle unit 201, the adapter tube 815 attached to the syringe 402 does not rotate, and the tube is not twisted or prevented from rotating. That is, since the connection pipe 501 to which the liquid material supply source 401 is connected does not rotate, not only the syringe 402 and the adapter tube 815 but also a liquid feed tube can be connected without being twisted.
- the light shielding plate 603 is disposed at a position facing the nozzle 202 for discharging the liquid material 901 across the rotation axis center line 306 of the hollow shaft motor 301 when the nozzle rotation mechanism 101 is viewed from below (see FIG. 4).
- the straight line connecting the overhanging portion side edge 605 of the light shielding plate 603 and the center line 207 of the nozzle 202 that discharges the liquid material 901 passes through the rotational axis center 306 of the hollow shaft motor 301 and is shielded so as to be aligned on a straight line.
- a plate 603 and a nozzle 202 are disposed.
- the photosensor 602 is attached to the center of the lower end of the base plate 701 so that the detection unit 606 is directed to the side where each component is disposed.
- the reference position of the tip of the nozzle 202 becomes a simple positional relationship between the front and center of the rotational position detection mechanism 601. It becomes easy to consider the application route when the application operation is performed. For the same reason, it is easy to control the linear operation and the rotation operation.
- the nozzle unit 201 is rotated counterclockwise when viewed from below (FIG. 6A).
- the rotation direction 808 is not limited to this, and is determined by the direction of the protruding portion side edge 605 of the light shielding plate 603. Then, the protruding portion side edge 605 of the light shielding plate 603 attached to the nozzle unit 201 detects the position where the optical axis of the photosensor detection unit 606 is first blocked, and stops the rotation (FIG. 6B). This position is set as a reference position in the rotational direction 808 of the nozzle 202 tip.
- the rotation speed of the hollow shaft motor 301 is a speed at which the motor rotates at the lowest resolution, which is the slowest speed. This is because if the rotational speed is too high, even if the photo sensor 602 detects the light shielding plate 603, it will not stop and go too far, and this excessive position may be used as the reference position in the rotation direction 808.
- the operation may be performed as follows. First, the nozzle unit 201 is rotated at a speed similar to that at the time of application, and the protruding portion side edge 605 of the light shielding plate 603 attached to the nozzle unit 201 first blocks the optical axis of the photosensor detection unit 606. Detects the position and stops rotation. However, as described above, it may be considered that the vehicle has gone too far when the vehicle stops (FIG. 6C).
- the reverse rotation is performed from the excessive position at the above-mentioned minimum speed, and the reverse rotation is stopped by detecting the position where the light shielding plate 603 does not block the light of the photosensor 602 (FIG. 6D).
- This position may be set as a reference position in the rotation direction 808. Thereby, the time to rotate at the minimum speed can be shortened.
- the rotation angle of the hollow shaft motor 301 is controlled by the motor controller 812, and the position in the rotation direction 808 at the tip of the nozzle 202 is controlled using the reference position determined by the above method as the origin. Since the position of the tip of the nozzle 202 can be accurately set, it is necessary to perform teaching again when applying to the application object 814 having a different shape or when applying the same application object 814 with a different application pattern. In addition, it is possible to easily cope with the problem only by changing the application program for controlling the application operation.
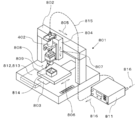
- a coating apparatus 801 according to the present embodiment is shown in FIG.
- a storage container 402 for storing the liquid material 901 is connected to the nozzle rotating mechanism 101, and the syringe 402 receives supply of compressed gas from a pressurizing source through an adapter tube 815.
- the nozzle rotation mechanism 101 is installed on the Z-axis drive mechanism 804 and can move in the vertical direction (direction indicated by reference numeral 807 in the drawing).
- the Z-axis drive mechanism 804 is installed on the X-axis drive mechanism 802 and is movable in the left-right direction (the direction indicated by reference numeral 805 in the drawing).
- the control device 810 that controls each mechanism described above includes a motor controller 812 that controls the hollow shaft motor 301 of the nozzle rotation mechanism 101, a dispense controller 811 that controls the pressure applied to the syringe 402, the time it takes to apply pressure, and the like. It is divided into a controller 813 for controlling the part.
- a motor controller 812 that controls the hollow shaft motor 301 of the nozzle rotation mechanism 101
- a dispense controller 811 that controls the pressure applied to the syringe 402, the time it takes to apply pressure, and the like. It is divided into a controller 813 for controlling the part.
- a procedure for performing a coating operation with the coating apparatus 801 according to the present embodiment is shown below.
- the nozzle rotation mechanism 101 to which the nozzle 202 and the syringe 402 are attached is installed on the Z-axis drive mechanism 804 of the coating apparatus 801.
- the reference position in the nozzle rotation direction 808 is set by the method described above.
- the application object 814 is placed on the table 809 and fixed.
- the nozzle 202 is moved onto the application object 814, and application is started.
- the operation in the XY directions (805, 806) is maintained so that the nozzle center line 207 is kept perpendicular to the application surface 817 when viewed from above.
- Control of the operation in the nozzle rotation direction 808 corresponding to is performed (see FIG. 8).
- the part including the table 809 and the nozzle rotating mechanism 101 is moved to the standby position by each drive mechanism (802, 803, 804), and the application operation for one application object 814 is completed.
- the above-described operation is repeated by replacing the already-applied application object with an unapplied application object.
- the coating apparatus of the present embodiment having the above-described configuration, since there are no mechanisms or members around the syringe, there is no obstruction in the operation on the syringe, and the operation on the syringe can be easily performed. Moreover, since only the syringe can be easily attached and detached by attaching and detaching at the syringe connection port, the liquid material can be replenished without affecting the nozzle position.
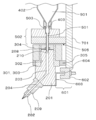
- the nozzle unit 201 of the present embodiment has an angle between the nozzle center line 207 and the rotation axis center line 306, and the flow path provided in the nozzle unit 201 has two parts (203 204) is the same as the nozzle rotation mechanism 101 described above.
- the nozzle 202 is disposed so that the discharge port at the tip of the nozzle is positioned on the rotation axis center line 306, and the flow path (second flow path 204) inscribed in the nozzle unit 201 is cranked accordingly. It differs from the first embodiment in that it is formed.
- the discharge port at the nozzle tip is directed away from the rotation axis center line 306.
- the discharge port at the nozzle tip is on the rotation axis center line 306 as shown in FIG. To be positioned.
- the connecting pipe 501 connected to the liquid material supply source 401 is inserted into the supply side opening 210, so that the rotation axis center line 306 and the flow path are Similar to the first embodiment, the first flow path 203 is formed so that the center lines 205 coincide.
- the discharge port at the tip of the nozzle is disposed so as to coincide with the rotation axis center line 306, the second from the first flow path 203 to the nozzle 202 in accordance with the direction of the nozzle 202.
- the flow path 204 is formed in a crank shape. In other words, there are three bending points in the flow path from the supply side opening 210 to the discharge port.
- the vacuum source is connected to the connection pipe of the nozzle rotation mechanism, so that the semiconductor chip divided from the wafer is sucked by the nozzle and moved from the wafer to the semiconductor chip mounting position on the substrate.
- Application to devices is also possible.
- Nozzle rotating mechanism 201 Nozzle unit 202 Nozzle 203 First flow path 204 Second flow path 205 First flow path center line 206 Second flow path center line 207 Nozzle center line 208 Seal member 209 Nozzle mounting portion 210 Supply side opening 301 Motor (hollow shaft motor) 302 Hollow part 303 Rotating part 304 Case 305 Motor fixing member 306 Motor rotation axis center line 401 Liquid material supply source 402 Storage container (syringe) 403 Connection port 404 Container holding member 405 Adjustment screw 501 Connection tube 502 Connection tube fixing member 503 Projection 504 Connection tube center line 505 Gap 601 Rotation position detection mechanism 602 Photo sensor 603 Shading plate 604 Projection portion 605 Projection side edge 606 Detection unit 701 Base member (base plate) 801 Coating device 802 X-axis drive mechanism 803 Y-axis drive mechanism 804 Z-axis drive mechanism 805 X-axis drive direction 806 Y-axis drive direction 807 Z-axis drive direction 808 Nozzle rotation
Landscapes
- Coating Apparatus (AREA)
- Nozzles (AREA)
Abstract
Description
例えば、特許文献1には、箱型形状部品の外側面や内面などへ塗布を行う塗布装置において、箱型形状部品を固定可能な固定部と、この固定部を水平および垂直方向へ移動可能な移動部と、塗布流動物を吐出するくの字形のニードルおよびシリンジと、シリンジを回転可能に内挿保持する保持部と、シリンジへチューブを介して加圧可能なディスペンサと、これらの動作を制御する制御部とからなる塗布装置が開示されている。
また、例えば、特許文献2には、ワークの被塗布面とノズルとを相対移動させながら、ノズルの先端吐出口から材料を被塗布面上の所定の軌跡に沿って塗布する材料塗布装置において、前端部が後端部より軌跡を横切る方向の幅が広くなる輪郭に設けられた先端吐出口を有するノズルを、軌跡のほぼ全域にわたって前端部が後端部よりも先行するように回転制御される塗布装置が開示されている。
また、吐出口の向きを変えるためにシリンジごと回転すると、チューブがシリンジに巻き付いてしまうため、ワークの交換毎にシリンジを逆回転させる必要があると考えられる。
さらに、モータ部がノズル先端から離れているので回転軸線がぶれやすく、ノズル先端の正確な位置決めが難しかった。
第2の発明は、第1の発明において、前記回動装置は、回転軸中心線(306)を軸方向に貫通して延在し、ノズルユニットが嵌設される中空部を有するモータを含んで構成されることを特徴とする。
第3の発明は、第1または2の発明において、前記ノズルユニットの有する流路は、液体材料供給源と連通する側の端部に回転軸中心線(306)と同軸に設けられた供給側開口部(210)を備えることを特徴とする。
第4の発明は、第3の発明において、前記供給側開口部に接続された接続管(501)と、前記ノズルユニットと離間してベース部材に配設され、接続管を固定する接続管固定部材(502)を備えることを特徴とする。
第5の発明は、第4の発明において、前記接続管(501)は実質的に直線状であり、液体材料供給源を直結するための突出部(503)を備えることを特徴とする。
第6の発明は、第1ないし5のいずれかの発明において、前記ノズルユニットに配設された検知用部材と、前記ベース部材に設けられたセンサ部とを含んで構成される回転位置検知機構を備えることを特徴とする。
第7の発明は、第6の発明において、前記検知用部材は回転軸中心線(306)を挟んで、前記ノズルと対向する位置に配設されることを特徴とする。
第8の発明は、第1ないし7のいずれかの発明において、前記ノズルを、前記吐出口がノズルユニットの外周の内側下方に位置するよう配設したことを特徴とする。
第9の発明は、第1ないし8のいずれかの発明に係るノズル回転機構と、ノズル回転機構と塗布対象物とを相対移動させる相対移動機構と、液体材料供給源と、制御装置とを備える塗布装置である。
また、軽量なノズルユニットのみを回転させるので、モータ等の駆動系にかかる負荷が少なく、駆動系とノズルユニットを直線的に配置することでヘッド部の小型化、軽量化が可能となる。
また、駆動系がそこに装着されたノズルユニットを直接回転するので、ベルトの滑り等による位置ずれがなく、吐出口の回転方向位置の正確な位置決めができ、途中に動力伝達機構を介さないのでエネルギ効率もよい。
また、ノズルを外すことなく液体材料供給源を取り付けおよび取り外しができるので、材料補充時にノズル位置がずれることはない。
さらに、ノズルユニットの基準位置を検知する回転位置検知機構を設けることにより、ノズルユニットの基準位置が正確に決まるので、吐出口の回転方向の位置決めを精度よく行うことができ、塗布プログラムの変更のみで容易に塗布パターン或いは塗布対象物の種類の変更に対応が可能である。
[構成]
本発明に係るノズル回転機構101の概略斜視図を図1に示す。また、正面図を図2、側面図を図3、下面図を図4、図2においてA-A線で切断したときの断面図を図5に示す。これらの図を参照しながら説明する。
ノズルユニット201は、第一の流路203が内設される部分が中空軸モータ301の中空部分302に嵌設しており、図示しないネジなどの締結部材で中空部分302に着脱自在に取り付けられる。この嵌設している部分では、ノズルユニット201内の第一の流路中心線205と中空軸モータの回転軸中心線306とが一致しており、ノズルユニット201が回転しても接続管501と連通する第一の流路203の供給側開口部210の位置は変わらない。よって、固定されて回転しない直線状の接続管501を第一の流路203に挿入することができ、ひいてはノズルユニット201、中空軸モータ301およびシリンジ402を直線的に配置することを可能としている。
本発明に係るノズル回転機構101の動作を図6を参照しながら説明する。
電源投入直後や、何らかの理由により回転方向808位置がずれた場合など、ノズル202先端の回転方向808の基準位置を定めるためには、次のように動作させる。なお、この回転方向808の基準位置を設定する動作をノズル原点復帰動作ということがある。
本実施例に係る塗布装置801を図7に示す。
ノズル回転機構101には、液体材料901を貯留する貯留容器402(シリンジ)が接続され、シリンジ402は加圧源からの圧縮気体の供給をアダプタチューブ815を通して受けている。このノズル回転機構101は、Z軸駆動機構804上に設置され、上下方向(図中の符号807で示す方向)へ移動可能となっている。Z軸駆動機構804は、X軸駆動機構802上に設置され、左右方向(図中の符号805で示す方向)へ移動可能である。X軸駆動機構802およびZ軸駆動機構804の下方には、塗布対象物814を載置するテーブル809が設けられたY軸駆動機構803が設置され、前後方向(図中の符号806で示す方向)に移動可能となっている。
上述の各機構を制御する制御装置810は、ノズル回転機構101の中空軸モータ301を制御するモータコントローラ812と、シリンジ402にかかる圧力や圧力がかかる時間などを制御するディスペンスコントローラ811と、その他の部分を制御するコントローラ813とに分かれている。
上記では、塗布装置801の一つの例を示したが、同様の目的を達成できる構成であれば、上記の構成に限定されるものではない。
本実施例に係る塗布装置801にて塗布作業を行う際の手順を以下に示す。
まず、ノズル202およびシリンジ402を取り付けたノズル回転機構101を塗布装置801のZ軸駆動機構804上に設置する。その後、前述したような方法でノズル回転方向808の基準位置設定を行う。そして、塗布対象物814をテーブル809上に載置し、固定する。次に、ノズル202を塗布対象物814上へ移動し、塗布が開始される。例えば、塗布対象物814の外側面に一周塗布を行う場合、上から見たときに塗布面817に対してノズル中心線207が垂直となる姿勢を保つよう、XY方向(805、806)の動作に対応したノズル回転方向808の動作の制御を行う(図8参照)。塗布が終了すると、テーブル809およびノズル回転機構101を含む部分は各駆動機構(802、803、804)により待機位置へ移動し、一つの塗布対象物814に対する塗布作業は終了となる。複数の塗布対象物に対して塗布作業を続ける場合は、既塗布の塗布対象物を未塗布の塗布対象物と交換して上記の作業を繰り返す。
さらには、本実施例の装置では、位置決めの対象となる吐出口が回転軸中心線306上にあることから、吐出口が回転軸中心線上にない構成と比べて回転方向の位置決め精度がよい。
なお上述の実施例は、ノズルユニット201を交換するのみで簡単に対応できることは言うまでもない。
201 ノズルユニット
202 ノズル
203 第一の流路
204 第二の流路
205 第一の流路の中心線
206 第二の流路の中心線
207 ノズル中心線
208 シール部材
209 ノズル取付部
210 供給側開口部
301 モータ(中空軸モータ)
302 中空部
303 回転部
304 ケース
305 モータ固定部材
306 モータ回転軸中心線
401 液体材料供給源
402 貯留容器(シリンジ)
403 接続口
404 容器保持部材
405 調節ネジ
501 接続管
502 接続管固定部材
503 突出部
504 接続管中心線
505 間隙
601 回転位置検知機構
602 フォトセンサ
603 遮光板
604 張り出し部
605 張り出し部側縁
606 検知部
701 ベース部材(ベース板)
801 塗布装置
802 X軸駆動機構
803 Y軸駆動機構
804 Z軸駆動機構
805 X軸駆動方向
806 Y軸駆動方向
807 Z軸駆動方向
808 ノズル回転方向
809 テーブル
810 制御装置
811 ディスペンスコントローラ
812 モータコントローラ
813 その他のコントローラ
814 塗布対象物
815 アダプタチューブ
816 加圧源からの圧縮気体の供給
817 塗布面
818 塗布方向
901 液体材料
Claims (9)
- 液体材料を吐出する吐出口を有するノズルと、ノズルおよび液体材料供給源と連通する流路を有するノズルユニットと、ベース部材と、ベース部材に配設され、ノズルユニットを回転させる回動装置とを備えるノズル回転機構であって、
前記ノズルを、ノズルの吐出口の中心線(207)とノズルユニットの回転軸中心線(306)とが角度を構成するようにノズルユニットに配設し、
前記ノズルユニットを、回動装置に着脱可能に装着したことを特徴とするノズル回転機構。 - 前記回動装置は、回転軸中心線(306)を軸方向に貫通して延在し、ノズルユニットが嵌設される中空部を有するモータを含んで構成されることを特徴とする請求項1に記載のノズル回転機構。
- 前記ノズルユニットの有する流路は、液体材料供給源と連通する側の端部に回転軸中心線(306)と同軸に設けられた供給側開口部(210)を備えることを特徴とする請求項1または2に記載のノズル回転機構。
- 前記供給側開口部に接続された接続管(501)と、前記ノズルユニットと離間してベース部材に配設され、接続管を固定する接続管固定部材(502)を備えることを特徴とする請求項3に記載のノズル回転機構。
- 前記接続管(501)は実質的に直線状であり、液体材料供給源を直結するための突出部(503)を備えることを特徴とする請求項4に記載のノズル回転機構。
- 前記ノズルユニットに配設された検知用部材と、前記ベース部材に設けられたセンサ部とを含んで構成される回転位置検知機構を備えることを特徴とする請求項1ないし5のいずれかに記載のノズル回転機構。
- 前記検知用部材は回転軸中心線(306)を挟んで、前記ノズルと対向する位置に配設されることを特徴とする請求項6に記載のノズル回転機構。
- 前記ノズルを、前記吐出口がノズルユニットの外周の内側下方に位置するよう配設したことを特徴とする請求項1ないし7のいずれかに記載のノズル回転機構。
- 請求項1ないし8のいずれかに記載のノズル回転機構と、ノズル回転機構と塗布対象物とを相対移動させる相対移動機構と、液体材料供給源と、制御装置とを備える塗布装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201080018233.4A CN102421536B (zh) | 2009-04-24 | 2010-04-23 | 喷嘴旋转机构以及具备该机构的涂布装置 |
| EP10767152.1A EP2422886B1 (en) | 2009-04-24 | 2010-04-23 | Nozzle rotation mechanism and coating device provided therewith |
| US13/265,971 US9016598B2 (en) | 2009-04-24 | 2010-04-23 | Nozzle rotation mechanism and application device therewith |
| SG2011078052A SG175342A1 (en) | 2009-04-24 | 2010-04-23 | Nozzle rotation mechanism and coating device provided therewith |
| HK12104972.0A HK1164212A1 (en) | 2009-04-24 | 2012-05-22 | Nozzle rotation mechanism and coating device provided therewith |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-105793 | 2009-04-24 | ||
| JP2009105793A JP5638768B2 (ja) | 2009-04-24 | 2009-04-24 | ノズル回転機構およびそれを備える塗布装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010123097A1 true WO2010123097A1 (ja) | 2010-10-28 |
Family
ID=43011211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/057229 WO2010123097A1 (ja) | 2009-04-24 | 2010-04-23 | ノズル回転機構およびそれを備える塗布装置 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US9016598B2 (ja) |
| EP (1) | EP2422886B1 (ja) |
| JP (1) | JP5638768B2 (ja) |
| KR (1) | KR101643215B1 (ja) |
| CN (1) | CN102421536B (ja) |
| HK (1) | HK1164212A1 (ja) |
| MY (1) | MY160656A (ja) |
| SG (2) | SG10201401442TA (ja) |
| TW (1) | TWI580479B (ja) |
| WO (1) | WO2010123097A1 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010253376A (ja) * | 2009-04-24 | 2010-11-11 | Musashi Eng Co Ltd | ノズル回転機構およびそれを備える塗布装置 |
| US20130216716A1 (en) * | 2010-08-20 | 2013-08-22 | Stefan Ströhlein | Nozzle for applying a coating agent |
| WO2016125751A1 (ja) * | 2015-02-03 | 2016-08-11 | 本田技研工業株式会社 | 塗布装置 |
| CN111663231A (zh) * | 2020-06-29 | 2020-09-15 | 苏州优百纺织有限公司 | 一种喷水织机用喷头 |
| CN118341641A (zh) * | 2024-06-18 | 2024-07-16 | 常州昊翔电子有限公司 | 扬声器外壳点胶装配一体式智能化流水线 |
Families Citing this family (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012156170A1 (en) * | 2011-05-13 | 2012-11-22 | Unilever N.V. | Spraying device |
| CN102527552A (zh) * | 2012-01-13 | 2012-07-04 | 东莞市华纬涂装设备有限公司 | 七轴自动往复喷涂机 |
| JP2014014790A (ja) * | 2012-07-10 | 2014-01-30 | Hitachi Ltd | ペースト塗布装置 |
| CN103567119A (zh) * | 2012-07-18 | 2014-02-12 | 苏州市星光精密机械有限公司 | 点胶用弯针头旋转定位装置 |
| CN103785576A (zh) * | 2012-10-31 | 2014-05-14 | 苏州市星光精密机械有限公司 | 一种弯针头点胶方法 |
| KR101423644B1 (ko) * | 2013-01-23 | 2014-07-25 | 주식회사 동원테크 | 코팅장치 |
| CN104085034A (zh) * | 2013-08-19 | 2014-10-08 | 都江堰金祥装饰工程有限公司 | 封边机的仿形夹头 |
| JP6305707B2 (ja) * | 2013-08-22 | 2018-04-04 | アルファーデザイン株式会社 | 液体吐出装置 |
| JP6538649B2 (ja) * | 2014-03-10 | 2019-07-03 | 武蔵エンジニアリング株式会社 | 塗布装置および塗布方法 |
| CN104624436A (zh) * | 2015-01-19 | 2015-05-20 | 东莞市高顿塑胶制品有限公司 | 一种全自动油边机 |
| JP6452147B2 (ja) * | 2015-01-19 | 2019-01-16 | 武蔵エンジニアリング株式会社 | 液体材料吐出装置 |
| CN105983498A (zh) * | 2015-02-11 | 2016-10-05 | 江苏沥泽生化科技有限公司 | 一种纳米银涂布装置 |
| US9713902B2 (en) * | 2015-05-01 | 2017-07-25 | Thermwood Corporation | Additive manufacturing apparatus |
| JP6480009B2 (ja) * | 2015-11-24 | 2019-03-06 | 東京エレクトロン株式会社 | 基板液処理装置、基板液処理方法および記憶媒体 |
| JP6726430B2 (ja) | 2016-01-25 | 2020-07-22 | 株式会社Screenホールディングス | 基板処理装置および基板処理方法 |
| JP6778426B2 (ja) * | 2016-09-20 | 2020-11-04 | 武蔵エンジニアリング株式会社 | 液体材料吐出装置 |
| CN107234025A (zh) * | 2017-08-02 | 2017-10-10 | 合肥英源新材料科技有限公司 | 一种涂布机的喷头 |
| CN107234023A (zh) * | 2017-08-02 | 2017-10-10 | 合肥英源新材料科技有限公司 | 涂布机 |
| KR102335942B1 (ko) * | 2018-01-16 | 2021-12-06 | 히라따기꼬오 가부시키가이샤 | 도포 시스템 및 작업 시스템 |
| JP7273458B2 (ja) * | 2018-01-30 | 2023-05-15 | ノードソン コーポレーション | 塗布装置及び塗布方法 |
| CN108580072B (zh) * | 2018-06-01 | 2024-09-20 | 江苏纽唯盛机电有限公司 | 喷嘴旋转机构及蒸脸装置 |
| CN109351511A (zh) * | 2018-11-28 | 2019-02-19 | 东莞市昱联智能自动化有限公司 | 一种可旋转喷枪及热熔胶喷枪 |
| US11289445B2 (en) * | 2018-12-24 | 2022-03-29 | Asm Technology Singapore Pte Ltd | Die bonder incorporating rotatable adhesive dispenser head |
| JP1646388S (ja) | 2019-04-25 | 2021-11-15 | ||
| CN114051432A (zh) * | 2019-07-03 | 2022-02-15 | 诺信公司 | 具有四个自由度的流体分配器 |
| TWD208385S (zh) | 2019-11-14 | 2020-11-21 | 日商武藏高科技股份有限公司 | 液體精密吐出機 |
| CN113118099A (zh) * | 2019-12-31 | 2021-07-16 | 盛美半导体设备(上海)股份有限公司 | 旋转喷头、清洗设备及清洗方法 |
| JP7295054B2 (ja) * | 2020-03-19 | 2023-06-20 | トヨタ自動車株式会社 | 高粘度材料の塗布方法および塗布装置 |
| JP1683121S (ja) | 2020-06-08 | 2021-04-12 | 液体吐出用ノズル | |
| JP7464453B2 (ja) | 2020-06-15 | 2024-04-09 | 株式会社Subaru | 塗布装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02132504A (ja) * | 1988-07-27 | 1990-05-22 | Fuji Xerox Co Ltd | 停止位置制御装置 |
| JPH04100558A (ja) | 1990-08-15 | 1992-04-02 | Hitachi Metals Ltd | 塗布装置 |
| JPH0621769U (ja) * | 1992-08-21 | 1994-03-22 | 株式会社クボタ | 回転噴水装置 |
| JP2003211045A (ja) | 2002-01-24 | 2003-07-29 | Three Bond Co Ltd | 材料塗布装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2012A (en) * | 1841-03-18 | Machine foe | ||
| US12009A (en) * | 1854-11-28 | Planing-machine | ||
| US4008A (en) * | 1845-04-22 | Improvement w the manufacture of oil from resin | ||
| JPS50141961U (ja) * | 1974-05-10 | 1975-11-21 | ||
| JPS5830595Y2 (ja) * | 1977-03-28 | 1983-07-06 | 石川島播磨重工業株式会社 | 回転ノズル装置 |
| US4690325A (en) * | 1986-09-17 | 1987-09-01 | Butterworth Jetting Systems, Inc. | High pressure fluid delivery system |
| US4715539A (en) * | 1986-12-11 | 1987-12-29 | Steele Curtis C | High-pressure water jet tool and seal |
| JPH037926U (ja) * | 1989-06-09 | 1991-01-25 | ||
| US5104043A (en) * | 1990-01-19 | 1992-04-14 | Butterworth Jetting Systems, Inc. | Magnetic speed control for self-propelled swivel |
| JPH0440252A (ja) * | 1990-05-29 | 1992-02-10 | Toko Giken Kogyo Kk | タンク洗浄装置 |
| JPH04102662U (ja) * | 1991-02-08 | 1992-09-04 | 株式会社丸山製作所 | ノズル装置 |
| US5240184A (en) * | 1992-04-28 | 1993-08-31 | Anthony Manufacturing Corp. | Spreader nozzle for irrigation sprinklers |
| JP3007926U (ja) * | 1994-08-18 | 1995-02-28 | 多摩川精機株式会社 | 中空軸モータ |
| US6021793A (en) * | 1996-08-01 | 2000-02-08 | Moulder; Jeffrey Ernest | Tank car cleaning and rinsing apparatus and method |
| JPH1043660A (ja) * | 1996-08-05 | 1998-02-17 | Canon Sales Co Inc | 塗布装置 |
| JPH1199354A (ja) * | 1997-09-27 | 1999-04-13 | Tdk Corp | 回転式塗布方法及び塗布装置 |
| AUPP331898A0 (en) * | 1998-05-05 | 1998-05-28 | Agtech International Pty Ltd | Spray head |
| JP2000197842A (ja) * | 1999-01-07 | 2000-07-18 | Toshiba Corp | 塗布装置、吐出手段及び塗布方法 |
| US6402048B1 (en) * | 2000-01-26 | 2002-06-11 | Galen Collins | Accurate horticultural sprinkler system and sprinkler head |
| AT410389B (de) * | 2001-01-30 | 2003-04-25 | Drechsel Arno Dipl Ing | Beregnungsanlage |
| US6659371B2 (en) * | 2001-10-26 | 2003-12-09 | Senior Investments Ag | Fuel injector seal construction and method of manufacture |
| JP2003164776A (ja) * | 2001-11-29 | 2003-06-10 | Toshiba Mach Co Ltd | 吹き付け装置 |
| US7631813B1 (en) * | 2004-12-17 | 2009-12-15 | The Toro Company | Sprinkler assembly |
| KR100907558B1 (ko) * | 2007-09-13 | 2009-07-14 | 주식회사 에스에프에이 | 도포 장치 |
| JP5154879B2 (ja) * | 2007-10-01 | 2013-02-27 | 武蔵エンジニアリング株式会社 | 液体材料の塗布装置、塗布方法およびプログラム |
| JP5638768B2 (ja) * | 2009-04-24 | 2014-12-10 | 武蔵エンジニアリング株式会社 | ノズル回転機構およびそれを備える塗布装置 |
-
2009
- 2009-04-24 JP JP2009105793A patent/JP5638768B2/ja active Active
-
2010
- 2010-04-23 EP EP10767152.1A patent/EP2422886B1/en active Active
- 2010-04-23 MY MYPI2011005128A patent/MY160656A/en unknown
- 2010-04-23 SG SG10201401442TA patent/SG10201401442TA/en unknown
- 2010-04-23 SG SG2011078052A patent/SG175342A1/en unknown
- 2010-04-23 US US13/265,971 patent/US9016598B2/en active Active
- 2010-04-23 CN CN201080018233.4A patent/CN102421536B/zh active Active
- 2010-04-23 TW TW099113015A patent/TWI580479B/zh active
- 2010-04-23 WO PCT/JP2010/057229 patent/WO2010123097A1/ja active Application Filing
- 2010-04-23 KR KR1020117027920A patent/KR101643215B1/ko active IP Right Grant
-
2012
- 2012-05-22 HK HK12104972.0A patent/HK1164212A1/xx unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02132504A (ja) * | 1988-07-27 | 1990-05-22 | Fuji Xerox Co Ltd | 停止位置制御装置 |
| JPH04100558A (ja) | 1990-08-15 | 1992-04-02 | Hitachi Metals Ltd | 塗布装置 |
| JPH0621769U (ja) * | 1992-08-21 | 1994-03-22 | 株式会社クボタ | 回転噴水装置 |
| JP2003211045A (ja) | 2002-01-24 | 2003-07-29 | Three Bond Co Ltd | 材料塗布装置 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010253376A (ja) * | 2009-04-24 | 2010-11-11 | Musashi Eng Co Ltd | ノズル回転機構およびそれを備える塗布装置 |
| US20130216716A1 (en) * | 2010-08-20 | 2013-08-22 | Stefan Ströhlein | Nozzle for applying a coating agent |
| US9138766B2 (en) * | 2010-08-20 | 2015-09-22 | Durr Systems Gmbh | Nozzle for applying a coating agent |
| WO2016125751A1 (ja) * | 2015-02-03 | 2016-08-11 | 本田技研工業株式会社 | 塗布装置 |
| CN107206413A (zh) * | 2015-02-03 | 2017-09-26 | 本田技研工业株式会社 | 涂覆装置 |
| JPWO2016125751A1 (ja) * | 2015-02-03 | 2017-12-28 | 本田技研工業株式会社 | 塗布装置 |
| US10562058B2 (en) | 2015-02-03 | 2020-02-18 | Honda Motor Co., Ltd. | Coating apparatus |
| CN111663231A (zh) * | 2020-06-29 | 2020-09-15 | 苏州优百纺织有限公司 | 一种喷水织机用喷头 |
| CN111663231B (zh) * | 2020-06-29 | 2021-08-20 | 吴江市新浩翔纺织有限公司 | 一种喷水织机用喷头 |
| CN111663231B8 (zh) * | 2020-06-29 | 2021-10-12 | 吴江市新皓翔纺织有限公司 | 一种喷水织机用喷头 |
| CN118341641A (zh) * | 2024-06-18 | 2024-07-16 | 常州昊翔电子有限公司 | 扬声器外壳点胶装配一体式智能化流水线 |
Also Published As
| Publication number | Publication date |
|---|---|
| SG10201401442TA (en) | 2014-06-27 |
| CN102421536A (zh) | 2012-04-18 |
| TW201041660A (en) | 2010-12-01 |
| HK1164212A1 (en) | 2012-09-21 |
| US20120097097A1 (en) | 2012-04-26 |
| EP2422886A4 (en) | 2013-08-14 |
| SG175342A1 (en) | 2011-11-28 |
| US9016598B2 (en) | 2015-04-28 |
| JP2010253376A (ja) | 2010-11-11 |
| MY160656A (en) | 2017-03-15 |
| EP2422886B1 (en) | 2018-10-31 |
| KR20120006557A (ko) | 2012-01-18 |
| TWI580479B (zh) | 2017-05-01 |
| EP2422886A1 (en) | 2012-02-29 |
| KR101643215B1 (ko) | 2016-07-27 |
| CN102421536B (zh) | 2015-03-25 |
| JP5638768B2 (ja) | 2014-12-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5638768B2 (ja) | ノズル回転機構およびそれを備える塗布装置 | |
| JP5283012B2 (ja) | 交換機能付きノズル、交換機能付きノズル装置及びそれを備える塗布装置 | |
| US7980197B2 (en) | Method and apparatus for dispensing a viscous material on a substrate | |
| JP4681126B2 (ja) | 高粘性流体塗布装置 | |
| WO2010090121A1 (ja) | はんだ供給装置、印刷装置、および印刷方法 | |
| TW202017658A (zh) | 液體材料塗佈裝置及塗佈方法 | |
| EP1579926A3 (en) | Apparatus supplying liquid drops to predetermined positions on a substrate | |
| US10449566B2 (en) | Liquid material discharge apparatus | |
| US11167306B2 (en) | Application system, operation system, and posture changing unit | |
| JP2010036186A (ja) | 分配組立体 | |
| US20040118935A1 (en) | Method of jetting viscous medium | |
| JP2008136970A (ja) | 液体材料吐出装置 | |
| JP2017527436A (ja) | ディスペンサ用の弁座 | |
| WO2018199103A1 (ja) | ケーブルユニット、それを備える液体材料供給装置および塗布装置 | |
| CN109689272A (zh) | 用于维修焊炬的运动控制方法和系统 | |
| JP2013052350A (ja) | ペースト吐出装置、ペースト塗布装置及びペースト塗布方法 | |
| KR102347138B1 (ko) | 회전식 미터링 헤드 | |
| KR20110062767A (ko) | 드릴장치 및 드릴링시스템 | |
| JP2012232282A (ja) | 液体塗布装置 | |
| JP5399348B2 (ja) | 塗装装置 | |
| JP5496833B2 (ja) | 塗装装置 | |
| JP5570919B2 (ja) | 塗装装置 | |
| KR20110062769A (ko) | 드릴링시스템 | |
| JP2012050966A (ja) | 塗装装置 | |
| JP2009028636A (ja) | 塗布装置および塗布方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 201080018233.4 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10767152 Country of ref document: EP Kind code of ref document: A1 |
|
| DPE1 | Request for preliminary examination filed after expiration of 19th month from priority date (pct application filed from 20040101) | ||
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010767152 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 20117027920 Country of ref document: KR Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13265971 Country of ref document: US |