KR870001754B1 - 시험 시스템용 전자 시험 헤드 포지셔너 시스템 - Google Patents
시험 시스템용 전자 시험 헤드 포지셔너 시스템 Download PDFInfo
- Publication number
- KR870001754B1 KR870001754B1 KR1019830003961A KR830003961A KR870001754B1 KR 870001754 B1 KR870001754 B1 KR 870001754B1 KR 1019830003961 A KR1019830003961 A KR 1019830003961A KR 830003961 A KR830003961 A KR 830003961A KR 870001754 B1 KR870001754 B1 KR 870001754B1
- Authority
- KR
- South Korea
- Prior art keywords
- test head
- assembly
- positioner
- vertical
- test
- Prior art date
Links
- 230000005484 gravity Effects 0.000 claims abstract 5
- 230000033001 locomotion Effects 0.000 claims description 16
- 230000008878 coupling Effects 0.000 claims description 13
- 238000010168 coupling process Methods 0.000 claims description 13
- 238000005859 coupling reaction Methods 0.000 claims description 13
- 210000000707 wrist Anatomy 0.000 claims description 12
- 238000000034 method Methods 0.000 claims 1
- 239000012530 fluid Substances 0.000 description 7
- 230000000712 assembly Effects 0.000 description 5
- 238000000429 assembly Methods 0.000 description 5
- 238000003032 molecular docking Methods 0.000 description 2
- 238000013016 damping Methods 0.000 description 1
- 238000002513 implantation Methods 0.000 description 1
- 230000024042 response to gravity Effects 0.000 description 1
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q11/00—Accessories fitted to machine tools for keeping tools or parts of the machine in good working condition or for cooling work; Safety devices specially combined with or arranged in, or specially adapted for use in connection with, machine tools
- B23Q11/001—Arrangements compensating weight or flexion on parts of the machine
- B23Q11/0017—Arrangements compensating weight or flexion on parts of the machine compensating the weight of vertically moving elements, e.g. by balancing liftable machine parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J1/00—Manipulators positioned in space by hand
- B25J1/12—Manipulators positioned in space by hand having means for attachment to a support stand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/48—Movable or adjustable work or tool supports using particular mechanisms with sliding pairs and rotating pairs
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q1/00—Members which are comprised in the general build-up of a form of machine, particularly relatively large fixed members
- B23Q1/25—Movable or adjustable work or tool supports
- B23Q1/44—Movable or adjustable work or tool supports using particular mechanisms
- B23Q1/50—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism
- B23Q1/54—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only
- B23Q1/5468—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only a single rotating pair followed parallelly by a single rotating pair
- B23Q1/5475—Movable or adjustable work or tool supports using particular mechanisms with rotating pairs only, the rotating pairs being the first two elements of the mechanism two rotating pairs only a single rotating pair followed parallelly by a single rotating pair followed perpendicularly by a single rotating pair
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/025—Arms extensible telescopic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0008—Balancing devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0008—Balancing devices
- B25J19/0012—Balancing devices using fluidic devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0008—Balancing devices
- B25J19/002—Balancing devices using counterweights
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/10—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting around a horizontal axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/10—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting around a horizontal axis
- F16M11/105—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting around a horizontal axis the horizontal axis being the roll axis, e.g. for creating a landscape-portrait rotation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/12—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting in more than one direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/2007—Undercarriages with or without wheels comprising means allowing pivoting adjustment
- F16M11/2014—Undercarriages with or without wheels comprising means allowing pivoting adjustment around a vertical axis
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/2007—Undercarriages with or without wheels comprising means allowing pivoting adjustment
- F16M11/2035—Undercarriages with or without wheels comprising means allowing pivoting adjustment in more than one direction
- F16M11/2071—Undercarriages with or without wheels comprising means allowing pivoting adjustment in more than one direction for panning and rolling
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon ; Stands for scientific apparatus such as gravitational force meters
- F16M11/20—Undercarriages with or without wheels
- F16M11/24—Undercarriages with or without wheels changeable in height or length of legs, also for transport only, e.g. by means of tubes screwed into each other
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B5/00—Measuring arrangements characterised by the use of mechanical techniques
- G01B5/0011—Arrangements for eliminating or compensation of measuring errors due to temperature or weight
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B7/00—Measuring arrangements characterised by the use of electric or magnetic techniques
- G01B7/004—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring coordinates of points
- G01B7/008—Measuring arrangements characterised by the use of electric or magnetic techniques for measuring coordinates of points using coordinate measuring machines
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/04—Housings; Supporting members; Arrangements of terminals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/06—Measuring leads; Measuring probes
- G01R1/067—Measuring probes
- G01R1/073—Multiple probes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R1/00—Details of instruments or arrangements of the types included in groups G01R5/00 - G01R13/00 and G01R31/00
- G01R1/02—General constructional details
- G01R1/06—Measuring leads; Measuring probes
- G01R1/067—Measuring probes
- G01R1/073—Multiple probes
- G01R1/07307—Multiple probes with individual probe elements, e.g. needles, cantilever beams or bump contacts, fixed in relation to each other, e.g. bed of nails fixture or probe card
- G01R1/07314—Multiple probes with individual probe elements, e.g. needles, cantilever beams or bump contacts, fixed in relation to each other, e.g. bed of nails fixture or probe card the body of the probe being perpendicular to test object, e.g. bed of nails or probe with bump contacts on a rigid support
-
- G—PHYSICS
- G12—INSTRUMENT DETAILS
- G12B—CONSTRUCTIONAL DETAILS OF INSTRUMENTS, OR COMPARABLE DETAILS OF OTHER APPARATUS, NOT OTHERWISE PROVIDED FOR
- G12B5/00—Adjusting position or attitude, e.g. level, of instruments or other apparatus, or of parts thereof; Compensating for the effects of tilting or acceleration, e.g. for optical apparatus
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M2200/00—Details of stands or supports
- F16M2200/02—Locking means
- F16M2200/021—Locking means for rotational movement
- F16M2200/022—Locking means for rotational movement by friction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M2200/00—Details of stands or supports
- F16M2200/04—Balancing means
- F16M2200/048—Balancing means for balancing translational movement of the undercarriage
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R31/00—Arrangements for testing electric properties; Arrangements for locating electric faults; Arrangements for electrical testing characterised by what is being tested not provided for elsewhere
- G01R31/28—Testing of electronic circuits, e.g. by signal tracer
- G01R31/2851—Testing of integrated circuits [IC]
- G01R31/2886—Features relating to contacting the IC under test, e.g. probe heads; chucks
- G01R31/2887—Features relating to contacting the IC under test, e.g. probe heads; chucks involving moving the probe head or the IC under test; docking stations
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Robotics (AREA)
- Testing Of Individual Semiconductor Devices (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- A Measuring Device Byusing Mechanical Method (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
- Electrodes Of Semiconductors (AREA)
Abstract
내용 없음.
Description
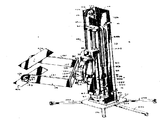
제1도 내지 제3도는 본 발명에 따른 시험 헤드 포지셔너(test head positioner)시스템의 사시도.
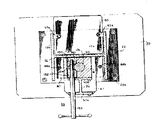
제4도는 제3도의 단면도.
제5a도는 취급기(handler)의 기구판(mechanism plate)과 시험 헤드를 결합하는 것을 도시한 설명도.
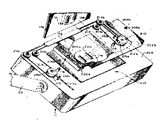
제5b도 및 제5c도는 시험 헤드와 기구판의 상세한 구조의 사시도 및 단면도.
제6도는 제1도 내지 제3도의 포지셔너 시스템의 6개의 자유도를 도시하는 설명도.
제7a도 내지 제7d도는 시험 시스템의 측방에 포지셔너 시스템을 고정하는 본 발명의 다른 실시예의 설명도.
제8도는 제3도의 절단 사시도.
제9도는 압력 실린더가 사용된 또 다른 실시예의 설명도.
제10도 및 제11도는 제1도 내지 제3도의 수직 칼럼이 수직원통형 지지관으로 대체되는 또 다른 실시예의 사시도.
제12도는 제10도 및 제11도의 수직관을 갖는 또 다른 실시예의 사시도.
* 도면의 주요부분에 대한 부호의 설명
10 : 시험 헤드 포지셔너 시스템 11 : 시험헤드
11a : 시험 연결기(test connector)
11b : 중심 맞추기 핀(alignment pin) 12 : 수직 컬럼
15 : 집적회로 취급기 17 : 기구판
20 : 베이스 조립체 30 : 포지셔너 아암 조립체
32 : 주아암 조립체 34 : 전방아암 조립체
36 : 손목결합 조립체
38 : 크레이들 조립체(cradle assembly) 40a, 40b : 시험 헤드 어댑터 판
50, 98, 122 : 수직축 또는 피벗축 55 : 로크
60 : 균형추 조립체(counter weight assembly)
62 : 추 캐리지(weight carriage) 80 : 리프트 블록(lift block)
90 : I 비임
95, 96 : 필로우 블록(pillow block) 100 : 전방아암
106 : 전방아암 로크 조립체 110 : 손목결합 로크 조립체
150, 152 : 쐐기부재 137 : 쇼울더 나사
205 : 결합 조립체(docking assembly) 210 : 캠 조립체
220 : 유체실린더
228 : 리니어 베어링(linearbearing)
250 : 포지셔너 시스템 251 : 압력 실린더
252 : 피스톤 306 : 크레이들 로크 조립체
400 : 포지셔너 시스템 402 : 피스톤
403 : 원통형 지지관 405 : 포지셔너 아암 조립체
450 : 포지셔너 시스템
본 발명은 시험 시스템용 전자 시험 헤드 포지셔너 시스템에 관한 것이다.
집적회로 및 다른 전자장치를 자동 시험하는데 있어서, 시험될 장치를 제 위치에 위치시키기 위한 특수한 장치 취급기가 사용되고 있다. 전자시험 자체는 장치 취급기와 연결 및 결합되어야하는 시험헤드를 갖춘 대형의 값비싼 자동시험 시스템에 의해 수행된다. 이런 시험 시스템에 있어서, 시험 헤드는 보통 34내지 136kg(75내지 300파운드)으로 대단히 무겁다. 그 이유는 시험헤드에 고속전자 타이밍 신호를 이용하기 위해, 시험중 전자회로를 시험될 장치에 가능한한 근접하게 배치시켜야 하기 때문이다. 따라서, 복잡한 장치를 고속 시험하기 위해 시험헤드는 전자회로로써 조밀하게 꾸려진다.
종래 기술은 장치 취급기에 대해 정확한 위치로 무거운 시험헤드를 쉽게 이동시키기 위해 조작기 또는 포지셔너를 제공함에 있어서 많은 문제점을 내포하고 있다.
종래의 어떤 포지셔너에서 시험 헤드는 동시에 이동할 수 있는 회전 및 슬라이드 기구와 리이드 나사에 의해 제위치에 배치된다. 이 종래의 포지셔너 시스템은 취급기와 쉽고 정확하게 결합하기에 필요한 모든 자유도를 제공하지 못하므로 불편하다. 사용자는 무거운 장치 취급기 또는 무거운 포지셔너를 이동시켜 중심을 맞추어야 한다.
다른 종래의 조작 시스템은 리이드 나사를 상, 하방향으로 구동하기 위해 모우터를 사용한다. 이런 모우터 구동 리이드 나사나 수동 리이드 나사는 과응력에 기인하여 시험헤드 소켓 연결부나 장치 취급기 상의 연결부를 손상시킬 염려가 있다.
종래 포지셔너 시스템의 또 다른 결점은 그들이 대형이며 시험설비에서 귀중한 마루공간을 상당량 차지하는 것이다. 또한 종래의 대형 시스템의 결점은 시험 시스템과 시험 헤드를 연결하는 케이블이 보통 짧고, 방해가 되며 약한 것이다. 따라서, 그 구조 및 크기때문에 종래의 포지셔너 시스템은 시험 시스템에 충분히 근접 이동시킬 수 없다.
종래의 기술로서 관련될 수 있는 특허들은 다음과 같다.

따라서, 본 발명의 목적은 장치 취급기와 시험 헤드를 쉽고 정확하게 결합 및 해체할 수 있게 수동 조작되는 시험헤드에 실질상의 무하중 상태(무게가 없는 상태)를 부여하며 6개의 자유도를 갖는 전자 시험 헤드 포지셔너 시스템을 제공하는 것이다.
전자 장치 취급기에 대하여 전자 시험 헤드를 위치시키기 위한 포지셔너 시스템은 축 수단을 포함하는 하우징을 갖는다. 포지셔너 조립체는 축 수단을 따라 수직운동을 하며, 6개의 자유도를 가지고 수평면내에서 전개하는 운동을 한다. 포지셔너 조립체는 시험헤드 위치잡이 수단을 포함한다. 균형잡기 수단이 포지셔너에 연결되어 시험 헤드가 부착된 포지셔너 조립체에 사실상의 무하중 상태를 제공한다.
이하, 첨부 도면을 참고로 본 발명의 1실시예에 대해 상세히 설명한다.
제5a도에는, 본 발명에 따른 시험 헤드 포지셔너 시스템(10)이 도시된다. 도시한 바와같이, 포지셔너 시스템(10)은 집적회로 취급기(15)의 기구판(17)과 결합하기 위한 시험 시스템용 시험 헤드(11)를 지닌다. 트랜지스터, 칩 또는 다이 등과 같은 장치 취급기에 의해 다른 전자장치가 취급되기도 하는 것은 이해될 것이다. 작동시, 무거운 시험 헤드(11)를 정확하고 정밀하게 조작하고 그것을 기구판(17)에 결합하기 위해 포지셔너 시스템(10)은 대략 무하중 상태로 수동으로 이동된다. 결합시, 중심맞추기핀(11b)이 관(17)내의 대응하는 개구부내에 삽입되며, 시험 연결기(11a)가 시험될 장치용 연결기(15a)와 결합한다. 시험 헤드(11)의 위치는 임의의 위치에 있는 다른 기구관과 결합하기 위해 수평면내에서 전개할 수 있는 6개의 자유도를 갖고 사실상의 무하중 상태에서 다른 위치로 정확하게 조작된다. 예를들면, 취급기용 기구판이 수평이나 수직면 어느곳에 있어도 무방하다. 포지셔너 시스템(10)이 제1도 내지 제3도에 상세히 도시되며, 여기서 H형 비임은 수직컬럼(12)을 형성한다. 컬럼(12)은 2개 벽(12a, 12b)을 연결하는 플랜지(12c)가 달린 대향벽(12a, 12b)을 갖는다. 컬럼(12)은 외향 신장하는 다리(24a 내지 24e)와 베이스판(22)을 갖는 베이스 조립체(20)에 의해 컬럼 저부에서 지지된다.
시험 헤드(11)는 주축(50)상에서 수직으로 이동하는 포지셔너 아암 조립체(30)에 의해 지지되고 그 결합이 조작된다. 조립체(30)는 주아암 조립체(32), 전방 아암조립체(34), 손목결합 조립체(36), 크레이들 조립체(38) 및 시험 헤드 어댑터판(40a, 40b)으로 구성된다. 주축(50)은 대향하는 필로우 블록(52, 53)에 의해 고정된다.
포지셔너 아암 조립체(30)는 컬럼(12)의 후부에서 양방향으로 수직 이동하는 추 캐리지(62)를 갖는 균형추 조립체(60)에 의해 주축(50)상에서 수직으로 요동하도록 균형잡힌다. 캐리지(62)는 캐리지에 고정되어 수직 신장하는 캐리지 축(65a, 65b)을 가지며 그리고 제거 가능한 추(62a 내지 62c)를 갖는다. 추(62a 내지 62c)는 정확하게 조립체(30) 및 시험 헤드(11)의 무게를 균형잡게 하여 그들이 실질적으로 무하중 상태가 되게 한다.
축(65a, 65b)의 상단부는 부재(67a, 67b)와 나합한다. 축(74)은 풀리(72a, 72b)의 회전을 허용하며, 컬럼(12)의 상단부에 장착된다. 케이블(68a, 68b)은 신장하며 주 아암 조립체(32) 밑에 배치된 리프트 블록(80)에 스웨이지 부재에 의해 견고히 고정된다. 블록(80)은 축(50)을 받기 위한 개구부를 가지며, 웨브(12c)를 따라서 슬라이드하며, 축(50) 둘레에서 회전하는 것이 방지된다.
제3도 및 제8도에서와 같이, 주 아암 조립체(32)는 블록(80)에 의해 지지되는 하부 베어링 블록(87)과 상부 베어링 블록(86)을 포함한다. 블록(86, 87)은 각각 하부 신장부(87a)를 가지며 I 비임(90)과 계합한다. 특히, I 비임(90)의 전방벽(90a)은 블록(86, 87)의 전방면에 고정되며 I 비임(90)의 후부(90b)는 신장부(86a, 87a)에 고정된다. 조립체(32)의 수직 및 회전운동은 로크(55)에 의해 임의의 위치에 임시로 로킹된다. 축(50)과 동심인 슬리이브(226)는 슬리이브를 축(50)상에서 상, 하향 이동하게 하는 내측 리니어 베어링(228)을 가지며 블록(87, 91)사이에 고정된다. 이런 방식으로, 수직축(50)상에서 (수직축에 대한) 수직 및 회전운동을 하기에 적합한 단일체의 주 아암 조립체(32)가 형성된다.
조립체(32)에 점성 댐핑을 제공하기 위하여, 유체실린더(220)는 필로우 블록(52)에 고정된 1 단부와 슬리이브(226)의 외면에 고착된 판(230)에 고정된 타단부를 갖는다. 실린더(220)는 조작자의 안전과 취급기와 시험 헤드의 손상방지를 위해서 아암 조립체(30)의 급속한 수직운동을 방지한다.
1조의 필로우 블록(95, 96)이 전방면(90a)에 고정된다. 수직축(98)은 필로우 블록(95, 96)을 통해 신장한다. 전방 아암 조립체(34)는 후부(101)를 갖는 전방 아암(100)을 포함한다. 축(98)은 후부(101)의 수직 개구부(107)를 통해 신장한다. 전방아암 조립체(34)에 의해 수직축에 대해 회전한 위치에서 임시로 로킹된다.
모든 다른 부재들을 원위치에 유지하면서 전방아암 조립체(34)는 효과적으로 180°선회될 수 있다.
전방 아암(100)은 손목결합 조립체(36)의 부착부재(120)를 회전적으로 받는 전방 "C"형상부를 갖는다. 부착부재(120)는 수직 상, 하 피벗핀(122)에 의해 전방아암(100)에 대해 회전한다. 블록(112)내에 형성된 손목결합로크 조립체(110)에 의해 조립체(34)에 대한 부재(120)의 회전이 잠정적으로 방지된다.
부재(120)는 수평으로 신장하는 축(300)을 받기 위한 횡방향 개구부를 갖는다. 외측 단부에서 축(300)은, 크레이들 조립체(38)의 후부판(130)을 견고히 고정하기 위해, 캡나사(312)를 나합하는 연결허브(310)에 용접된다.
크레이들 조립체(38)는 시험 헤드용 U형상 호올더를 형성하기 위해 함께 용접된 3개의 벽(130 내지 132)에 의해 형성되다. 축(300)은 수평축에 대한 조립체(38)의 회전을 허용하며, 조립체(38)는 크레이들 로크 조립체(306)의 조임에 의해 제위치에 고정된다.
벽(131, 132)은 시험헤드 어댑터 판(40a, 40b)을 받으며 이 판들이 벽에 대해 회전한 후 제위치에 견고히 고정될 수 있게 한다. 벽(131)은 단부에 쇼울더 나사(137)를 받기 위한 개구부(136)와 원형 홈(135)을 갖는다. 로크놉(140)은 판(40a)에 나합되며 통상적인 방식으로 원형홈(135)내로 움직인다. 이런 방식으로 로크놉(140)을 조임으로써, 판(40a)은 벽(131)에 견고히 고정된다.
시험헤드 포지셔너 시스템(10)은 동시에 6개의 자유도, X, Y, Z, θX, θY, θZ로 위치한다. 제6도와 같이, 시험헤드(11)의 적절한 결합을 위해서는, 예를들어 시험될 장치용 연결기(15a)에 대해 시험 연결기(11a)가 정확하고 용이하게 배치될 수 있도록 시험 연결기(11a)가 6개의 자유도를 갖는 것이 중요하다. Y방향이 수직 또는 상·하 방향이라면, 축(50)에 대한 조립체(32)의 수직 이동은 Y방향의 자유도를 제공한다. Y축에 대한 회전인 θY자유도는 수직축 또는 피벗축(50, 98 및 122)에 대한 모든 결합부의 동시 회전 또는 피벗팅에 의해 제공된다.
X방향을 좌에서 우방향이라고 하면, θY와 같은 식으로 피벗축(50, 98 및 122)에 의해 자유도가 제공된다. θX자유도는 쇼울더나사 피벗(137)에 의해 마련된다. 전·후 이동으로 간주되는 Z이동에 관하여, 자유도는 θY와 같은 식으로 피벗축(50, 98 및 122)에 의해 마련되고, θZ는 축(300)의 선회에 의해 마련된다.
제4도에, 통상적인 쐐기 로크 시스템을 갖는 주 아암 조립체로크(55)가 도시된다. 특히, 2개의 쐐기(150 및 152)가 축(50)의 양측상에 마련된다. 로크핸들(153)을 시계방향으로 선회시킴으로써 쐐기부재(150, 152)는 함께 모여져서 축(50)에 압력을 가하고, 따라서 축(50)에 대해 블록(91)의 회전을 방지하며 또한 블록(91)과 전체조립체(30)의 수직 이동을 방지한다. 유사한 로크조립체가 각기 선회아암(106a, 110a, 306a)을 갖는 전방 아암로크 조립체(106), 손목결합 로크조립체(110) 및 크레이들 로크조립체(306)에 마련된다.
제5b도, 제5c도에 기구판(17)과 시험헤드(11)가 상세히 도시된다. 특히, 기구판(17)은 취급기 후부판(17a)과 결합 거싯조립체(docking gusset assembly : 17b)를 갖는다. 후부판(17a)은 판(17a)의 후면에 고정된 숫 연결기(15b)에 가동 접촉부를 통해 전기적으로 연결된 시험될 장치 연결기(15a)를 수반한다. 조립체(17b)는 연결기(15b)에의 접근을 허용하기 위한 개구부(200)를 가지며, 판(17a)의 후면에 조립체(17b)로 보울팅함으로써 거싯 또는 블록(202a, 202b)을 후면에 효과적으로 제공한다. 다른 실시예에서는 유사한 거싯이 후면에 직접 설치될 수 있다.
각 거싯(202a, 202b)은 중앙에 배치된 안내 개구부(204a, 204b)를 가지며 시험헤드(11)의 안내 또는 중심 맞추기 핀(11b)을 받기에 적합하다. 특히, 시험헤드(11)는 결합조립체(205)와 시험 헤드면판(206)상에 설치된 시험 연결기(11a)를 갖는다. 안내 또는 중심 맞추기핀(11b)은 취급기 연결기(15b)에 연결기(11a)를 정확기 배치시킬 수 있다.
연결기(11a, 15b)는 대단히 약하므로 손상을 피하기 위해서는 상당히 정확하게 결합되어야 한다. 그것은 시험헤드(11)의 무게와 부피를 고려하면 특히 중요하다.
따라서, 안내핀(11b)과 블록(202a, 202b)은, 핀(11b)이 연결기(11a, 15b)의 정렬과 정확한 연결을 제고시키는 안내개구부(204a, 204b)에 실제로 수납될때까지, 연결기(11a, 15b)를 서로 분리 유지한다. 핀(11b)이 상기 개구부에 정렬되면 연결기(11a, 15b)들을 서로 당겨 연결시킬 필요가 있다. 이것은 블록(202a, 202b)으로부터 외향 신장하는 캠 종동자핀(206a, 206b)을 받는, 판(206)상에 설치된 캠조립체(210)에 의해 달성된다.
조립체(210)는 1조의 원통형 캠(212a, 212b)을 가지며 이 캠들은 무단 케이블(214)에 의해 동기적으로 작동한다. 각 캠은 도시한 바와같이 풀리(214a 내지 214b)에 의해 캠 사이에 팽팽히 연결된 케이블(214)을 받기 위한 하부홈을 갖는다. 각 캠(212a, 212b)은 외향 신장하는 핸들(215a, 215b)을 가지며, 이 핸들의 선회로써 양 캠이 동기적으로 작동된다.
각 캠(212a, 212b)은, 핀(11b)이 개구부(204a, 204b)내에 있을 때 핀(206a, 206b)을 받기 위해 상면상에 상부 절결부를 갖고, 측부상에는 헬리컬 홈(216a, 216b)을 갖는다. 핸들(215a, 215b)중 하나를 선회시키면 캠은 시험헤드(11)를 취급기 기구판(17)의 면내로 당기기 위해 동기적으로 작동함으로써 연결기(11a, 15b)가 상호결합관계가 되게 한다. 결합후, 많은 장치가 취급기 시스템에 의해 시험된다. 시험 형상을 변경하기 위해서는 연결기(11a, 15b)를 분리시켜 시험 헤드로부터 취급기를 제거하면 된다. 따라서, 상기 핸들중 하나가 판(206)으로부터 후부판(17a)을 당기기 위해 작동하여 연결기(11a, 15b)를 분리시킨다.
각 안내핀(11b)은 눈금조정 가능하며, 안내핀 마운트(207)를 받는 내측 챔버를 갖는 외측 핀 하우징(203)을 포함한다. 마운트(207)는 간극을 제공하는 개구부를 통해 신장하는 캡나사(209)를 받기 위한 내측 챔버를 갖는다. 따라서, 나사(209)는 하우징(203)이 판(206)상에 정확히 정렬되도록 해제될 수 있다.
제7a도에 시험 시스템의 시험 캐비넷(11c) 바로 옆의 마루상에 직접 보울팅된 베이스(22b)가 도시된다. 제7b도에 도시한 또 다른 실시예에서는 베이스(22c)의 하면의 한쪽을 따라 강성의 수평바아 또는 다리(160)가 하면에 부착된다. 또 버팀대(165)가 캐비넷(11c)과 컬럼(12)의 벽(12a)에 고정된다. 이런 방식으로, 컬럼(12)이 캐비넷(11c)에 근접 고정된다.
제7c도의 실시예에서, 베이스(22d)는 그 하면에서 시험 캐비넷(11c)의 인접한 측벽들로 부착된 상호 수직인 다리(170, 171)와 결합한다. 캐비넷(11c)에 보울팅되는 대신에 다리 또는 바아(170, 171)는 제7d도에 도시한 바와같이 바아(170a, 170b)로서 캐비넷의 단부까지 신장될 수 있다. 이 바아들은 서로 보울팅되며 또한 2개의 추가 바아(173, 175)에 보울팅된다. 이식으로, 4개의 바아(170a, 171a, 173 및 175)는 베이스(22e)와 캐비넷(11c)을 견고히 결합하기 위해 서로 보울팅된다.
본 발명의 또 다른 실시예가 제9도에 도시되며, 거기서 시스템(250)은 피스톤(252)을 갖는 압력 실린더(251)로 시스템(10)의 균형추 조립체(60) 및 케이블 조립체(68a, 68b)를 대체한다. 실린더(251)는 균형잡기 조립체(60)와 같은 기능을 수행하여 상기 조립체의 실제 위치에 상관없이 중력에 대응하여 아암 조립체(30a)(시험헤드(11) 포함)상에 일정한 힘을 발생한다. 조립체(30a)의 상이 한 중량의 균형잡기는 펌프(257)에 의해 제공된 조절기(258)에 의해 실린더(251)내에 일정한 압력을 유지함으로써 달성된다.
실린더(251)는 제9도의 컬럼의 중앙웨브(12c')에 견고히 고정된다. 피스톤(252)은 상향 신장하며, 웨브(12c')에 형성된 슬롯(256)을 통해 신장되는 수평아암(254)에 고정되게 연결된다. 아암(254)의 타단부는 제9도 및 제8도의 슬리이브(226)에 견고히 용접된다. 다른 모든 점에서는, 시스템(250)은 시스템(10)과 실질적으로 유사하다.
제10도 및 제11도의 또 다른 실시예에서는 시스템(10)의 수직 컬럼(12)이, 수직으로 변위된 원통형 지지관(403)으로 대체되어 시스템(400)으로 도시되어 있다. 관(403)은 시일(414a, 414b)을 갖는 피스톤(402)을 위한 실린더를 형성한다. 시스템(10, 250)에서와 같이, 지지관(403)은 신장하는 다리(24a 내지 24e)를 갖는 베이스 조립체(20b)에 의해 저부에서 지지된다. 관(403)과 피스톤(402)은 실린더(251)와 피스톤(252)과 같은 식으로 작동한다.
특히, 유체공동(412)이 피스톤과 실린더 사이에 형성된다. 압력유체가 라인(407)에 의해 연결된 유체원으로부터 조절기(404), 압력 게이지(406)를 통해 공동(412)으로 유입, 유출한다. 통상적인 방식으로, 조절기(404)는 조절기 세팅(404b)보다 압력이 과도할때 공동(412)으로부터 압력이 방출되도록 하기위해 대기로 개방된 개구부(404a)를 갖는다. 바람직한 예에서, 상기 유체는 1.75내지 7kg/㎠(25 내지 100파운드/평방인치)의 공기다.
이것은 34내지 136kg(75내지 300파운드)의 시험 헤드를 포함하는 아암조립체(405)의 전체 중량을 감당한다.
이런 방식으로, 일정 압력의 "가스 스프링"상태가 달성되어서 포지셔너 아암조립체(405)가 효과적으로 무하중 상태에 도달한다. 조립체(405)의 위치를 수동으로 상, 하로 이동하려할때, 공동(412)내의 유체 체적이 변화하며 이 체적은 압력 조절기(404)에 의해 즉시 보상된다. 바람직하게, 조립체(405)는 38 내지 51cm(15 내지 20인치)이동한다.
피스톤(402)내에는 제1도 및 제8도에 도시한 것과 유사한 댐퍼 봉(222a)을 갖는 댐퍼(220a)가 배치된다. 댐퍼(220a)의 정부단부는 아암조립체(405)의 상부 판(424)에 연결된 베어링(418)에 지지된다. 이런 방식으로, 조립체(405)의 회전으로 댐퍼봉(222a)이 역으로 비틀리지 않으면서 댐퍼(220a)는 조립체(405)의 운동을 효과적으로 감쇄시킨다.
조립체(405)는 조립체(30)와 유사하지만 보다 간단하게 설계되었다. 특히, 피스톤(402)의 회전과 수직운동은 도시한 바와같이 로크조립체(416)에 의해 로킹된다.
피스톤(402)의 상부는 지지 설치관(428, 430)이 고정되어 있는 설치 블록(426)에 견고히 고정된다. 판(428)은 그 외면에 베어링 블록(428a, 428b)을 고정하여, 유사하게 판(430)은 블록(430a, 430b)을 고정한다. 이 블록들은 각기 수평축(432, 434)을 받기 위한 리니어 베어링을 갖는다. 판(428)에 고정된 로킹블록(437)은 효과적으로 축(432)의 이동을 방지한다. 축(432, 434)은 그 좌단부에서, 조립체(110)와 유사한 로크조립체(443)를 갖는 손목 베어링 블록(442)을 견고히 지니는 손목 설치관(440)에 견고히 연결된다.
블록(442)은 그 내측 구간에서, 시스템(10)의 조립체(36, 38)와 각기 유사한 크레이들 조립체(38a)를 수반하는 손목결합 조립체(36a)를 고정한다.
작동에 있어서, 시스템(10)에서와 같이 포지셔너 시스템(400)의 모든 로크는 개방되고, 크레이들 조립체(38a)는 그 소정의 위치로 이동된다. 즉, 조립체(405)는 축(432, 434)에 의해 수평으로 이동하고 원통형 지지관(403)에 대해 선회한 후 블록, 조립체(442, 36a 및 38a)에 의해 결정된 다른 위치로 선회한다. 수평이동에 의해 축(432, 434)이 전술한 6개의 자유도를 제공하므로 전방아암 축(98)에 대한 필요성을 제거한다. 소정의 위치에 도달했을 때 각 로크(416, 437, 443, 36b) 및 크레이들 조립체(38a)의 로크가 소정의 위치를 유지하기 위해 작동된다.
포지셔너 시스템(400)의 변형이 포지셔너 시스템(450)으로서 제12도에 도시된다. 포지셔너 시스템(450)은 블록(429a, 429b, 452)에 수평으로 지지된 단일축(432a)을 갖는 간단한 구조이므로 비교적 가벼운 시험 헤드에 적합하다. 블록(429a, 429b, 452)은 피스톤(402)에 의해 지지된 마운트 블록(426a)에 고정된다. 축(432a)의 수평 및 회전운동은 블록(452)내의 전술한 쐐기 로크시스템(55a)에 의해 로킹된다. 또한, 축(432a)의 단부는 손목 베어링 블록(440a)에 견고히 고정된다. 블록(440a)은 크레이들 조립체(38b)를 지니는 단순화된 손목결합조립체(460)를 지지한다. 적당한 로크들이 전술한 방식으로 블록(440a)과 조립체(460, 38b)에 마련된다.
Claims (17)
- 중력효과가 없는 사실상의 무하중 상태에서 시험 헤드를 유지시키는 시험 시스템용 전자시험 헤드포지셔너 시스템에 있어서,수직컬럼(12) ;상기 수직컬럼(12)에 결합되어 수직컬럼(12)에 대한 수직이동 및 수평이동을 행하며, 상기 시험헤드 부착용의 크레이들 조립체(38)를 갖는 포지셔너 조립체(30) ;상기 포지셔너 조립체(30)에 결합되어 시험헤드(11)를 부착한 포지셔너 조립체(30)에 사실상의 무하중 상태를 제공하는 균형잡기 조립체(60);를 포함하고, 그리고 상기 포지셔너 조립체(30)와 상기 수직컬럼(12)이 적어도 3개의 평행한 수직축(50, 98, 122)을 가짐으로써, 상기 포지셔너 조립체(30)가 수평으로 전개함에 따라 상기 3개의 수직축(50, 98, 122)자체가 시험 헤드(11)를 부착한 포지셔너 조립체(30)의 중량을 지지하고, 상기 포지셔너 조립체(30)가 중력효과를 받지 않고 상기 3개의 수직축중 2수직축(98, 122)에 대해 수동식으로 회전함에 따라 상기 2축이 각각의 축선에 대해 동시에 자유롭게 회전하며, 상기 2수직축중 적어도 하나가 상기포지셔너 조립체에 대해 수직이동을 하지 않는 것을 특징으로 하는 시험 시스템용 전자시험 헤드 포지셔너 시스템.
- 제1항에 있어서, 상기 2수직축((98, 122) 중 다른 하나가 상기 포지셔너 조립체에 대해 수직이동을 하지 않는것을 특징으로하는 시험 시스템용 전자시험 헤드포지셔너 시스템.
- 제2항에 있어서, 수직컬럼(12)이 제3의 수직축선을 형성하는 수직축(50)을 가짐으로써 상기수직축(50)을 따라 포지셔너 조립체(30)을 이동시키는 것을 특징으로하는 시험 시스템용 전자시험 헤드포지셔너 시스템.
- 제2항에 있어서, 포지셔너 조립체(30)가, 상기 2수직축(98, 122) 사이에서 축을 갖지 않으면 상기 2수직축에 대한 회전을 제공하는 장치를 포함하는 것을 특징으로 하는 시험 시스템용 전자시험 헤드 포지셔너 시스템.
- 제3항에 있어서, 상기 포지셔너 조립체(30)가 상기 2수직축(90, 122)들 사이에서 그리고 상기 2수직축과 상기 제3수직축(50)과의 사이에서 축을 갖지 않는 것을 특징으로 하는 시험 시스템용 전자시험 헤드 포지셔너 시스템.
- 중력효과가 없는 사실상의 무하중 상태에서 시험헤드를 유지시키는 시험 시스템용 전자시험 헤드포지셔너 시스템에 있어서,제1수직축을 갖는 원통형 지지관(403) ;상기 원통형 지지관에 결합되어 상기 원통형 지지관에 대한 수직이동 및 수평이동을 행하며, 상기 시험헤드 부착용의 크레이들 조립체(38a)를 갖는 포지셔너 조립체(405) ;상기 포지셔너 조립체에 결합되어 시험헤드를 부착한 상기 포지셔너 조립체에 사실상의 무하중 상태를 제공하는 댐퍼(220a) ; 를 포함하고, 그리고 상기 포지셔너 조립체가 원통형 지지관(403)에 대한 시험헤드(11)의 수평이동을 제공하는 수평축(432, 434), 제2수직축 제2수직축에 대해 시험헤드(11)를 피벗팅시키는 손목결합 조립체(36a)를 구비하며,상기 포지셔너 조립체가 수동식으로 전개되면서 상기 제1 및 제2수직축중 적어도 하나가 자유로이 회전하며, 또한 상기 포지셔너 조립체가 부가적인 수평축을 가져 시험헤드를 상기 부가적인 수평축에 대해 회전시켜서, 시험헤드가 수평으로 전개되고 회전함에 따라 상기 제1 및 제2수직축, 상기 수평축(432, 434) 및 상기 부가적인 수평축 자체가 포지셔너 조립체와 시험헤드의 중량을 중력효과를 받지않고 지지하는 것을 특징으로 하는 시험 시스템용 전자시험헤드 포지셔너 시스템.
- 제6항에 있어서, 상기 포지셔너 조립체(405)가 원통형 지지관(403)상에 상기 포지셔너 조립체를 장착시키기 위한 부가적인 장착장치 및, 크레이들 조립체(38a)와 상기 부가적인 장착장치간의 상대적 수직이동을 방지하기 위해 상기 부가적인 장착장치를 견고히 결합시키는 결합장치를 포함하는 것을 특징으로하는 시험 시스템용 전자시험 헤드 포지셔너 시스템.
- 제6항에 있어서, 상기 수평축(432, 434) 및 상기 부가적인 수평축 모두가 상호 수직이동을 하지않는 것을 특징으로 하는 시험 시스템용 전자시험 헤드 포지셔너 시스템.
- 제6항에 있어서, 상기 제2수직축, 수평축(432, 434) 및, 부가적인 수평축 모두가 상호 수직이동을 하지않는 것을 특징으로 하는 시험 시스템용 전자시험 헤드 포지셔너 시스템.
- 제6항에 있어서, 포지셔너 조립체(405)가 소정의 최저위치와 최상위치간을 기계적인 제한사항없이 수동식으로 자유로이 수직이동하는 것을 특징으로 하는 시험시스템용 전자시험 헤드 포지셔너 시스템.
- 제6항에 있어서, 상기 크레이들 조립체(38a)가 이 조립체(38a)에 고정된 피벗팅 장치를 갖는 시험헤드 부착장치를 구비함으로써 부가적 수평축에 대해 상기 시험 헤드부착장치를 회전시키는 것을 특징으로하는 시험시스템용 전자시험 헤드 포지셔너 시스템.
- 시험시스템용 전자시험 헤드 포지셔너 시스템에서 상호 결합되기에 적합한 제1 및 제2연결기(11a, 15b)를 각기 갖는 전자시험 헤드(11)와 전자장치 취급기(15)를 상호결합 및 해체하는 시스템에 있어서,제1연결기(11a)의 양측상에서 시험헤드(11) 또는 장치 취급기(15)중의 어느한쪽에 견고히 고정된 제1 및 제2중심맞추기 핀(11b) ;개개의 제1 및 제2안내개구부(204a, 204b)를 가지며 제2연결기(15b)의 양측상에서 시험헤드(11) 또는 장치 취급기(15)중의 다른 한쪽에 견고히 고정된 제1 및 제2 거싯(202a, 202b) ;상부 표면을 가지며 제1연결기(11a) 양측상에서 상기 제1 및 제2중심맞추기 핀(11b)에 대해 적당히 떨어진 간격으로 배치된 제1 및 제2원통형캠(212a, 212b); 을 가지며, 그리고 제1 및 제2연결기(11a, 15b)의 정확한 결합을 위해 상기 제1 및 제2안내 개구부(204a, 204b)를 제1 및 제2중심맞추기 핀(11b)에 대해 각각 정확히 정렬시켜 상기 중심맞추기 핀(11b)을 정확히 수용하며, 상기 제1 및 제2원통형캠(212a, 212b)의 상부 표면과 제1 및 제2중심맞추기 핀(11b)의 높이는, 상기 제1 및 제2중심맞추기 핀이 제1 및 제2거싯과 각각 계합할때 상기 제1 및 제2중심맞추기 핀이 상기 제1 및 제2안내개구부에 각각 정확히 정렬되어 수용될때까지 상기 제1 및 제2연결기(11a, 15b) 상호간의 결합을 방지시키는 높이로 되어, 상기 연결기(11a, 15b)가 손상되지 않도록 하는것을 특징으로하는 시험 헤드와 장치 취급기의 상호결합 및 해체 시스템.
- 제12항에 있어서, 상기 제1 및 제2거싯(202a, 202b) 각각이 길다란 외측방 표면을 가지며, 제1중심맞추기 핀(11b)이 제1원통형 캠(212a)과 간격을 가지고 떨어져 배치되어 그 사이에서 거싯의 외측방표면과 제1안내개구부(204a)간의 제1거싯(202a)을 근접 간격으로 수용하며, 제2중심맞추기 핀(11b)이 제2원통형 캠(202b)과 간격을 가지고 떨어져 배치되어 그 사이에서 거싯의 외측방 표면과 제2안내개구부(204b)간의 제2거싯(202b)을 근접 간격으로 수용하는 것을 특징으로하는 시험헤드와 장치 취급기의 상호 결합 및 해체 시스템.
- 제12항에 있어서, 제1 및 제2중심맞추기 핀(11b)과 제1 및 제2원통형 캠(212a, 212b)의 상부 표면의 높이는 사실상 서로 동일한 것을 특징으로 하는 시험헤드와 장치 취급기의 상호결합 및 해체 시스템.
- 제12항에 있어서, 상기 원통형 캠(212a, 212b)은 캠조립체(210)를 형성하여 시험헤드(11)에 회전가능하게 부착되고 또한 장치 취급기(15)에 고정된 캠종동자 핀(206a, 206b)을 수용하기에 적합하게 되어, 상기 시험헤드와 장치 취급기를 결합하고 해체시키는 것을 특징으로 하는 시험헤드와 장치 취급기의 상호 결합 및 해체 시스템.
- 제15항에 있어서, 상기 원통형 캠(212a, 212b)이 상기 캠종동자 핀(206a, 206b)을 수용하는 헬리컬홈(216a, 216b)및, 상기 캠들이 동기적으로 선회하게끔 상기 캠들을 연결시키는 케이블(214)을 갖는 것을 특징으로 하는 시험헤드와 장치 취급기의 상호결합 및 해체 시스템.
- 제12항에 있어서, 상기 중심맞추기 핀(11b)중 적어도 하나가 상기 핀의 위치조정용 마운트(207)를 포함하는 것을 특징으로하는 시험헤드와 장치 취급기의 상호결합 및 해체 시스템.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US411,311 | 1982-08-25 | ||
| US06/411,311 US4527942A (en) | 1982-08-25 | 1982-08-25 | Electronic test head positioner for test systems |
| US06522635 US4589815B1 (en) | 1982-08-25 | 1983-08-11 | Electronic test head positioner for test systems |
| US522.635 | 1983-08-11 | ||
| US411311 | 1999-10-04 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR840005699A KR840005699A (ko) | 1984-11-15 |
| KR870001754B1 true KR870001754B1 (ko) | 1987-10-06 |
Family
ID=23628432
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1019830003961A KR870001754B1 (ko) | 1982-08-25 | 1983-08-24 | 시험 시스템용 전자 시험 헤드 포지셔너 시스템 |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US4527942A (ko) |
| JP (3) | JPS5960206A (ko) |
| KR (1) | KR870001754B1 (ko) |
Families Citing this family (92)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60193407U (ja) * | 1984-06-02 | 1985-12-23 | 東陶機器株式会社 | 直角測定器 |
| US4715574A (en) * | 1985-11-12 | 1987-12-29 | Intest Corporation | Safety lock for materials handling system |
| DE3615941A1 (de) * | 1986-05-12 | 1987-11-19 | Willberg Hans Heinrich | Geraet zum pruefen von elektronischen bauelementen, insbesondere ic's |
| DE3638430A1 (de) * | 1986-11-11 | 1988-05-19 | Multitest Elektronische Syst | Vorrichtung zum testen und sortieren von elektronischen bauelementen, insbesondere ic's |
| DE3638991A1 (de) * | 1986-11-14 | 1988-05-19 | Focke & Co | Foerdereinrichtung, insbesondere palettierer |
| US4884938A (en) * | 1986-12-01 | 1989-12-05 | Kawasaki Jukogyo Kabushiki Kaisha | Apparatus for handling large-sized articles |
| US4840366A (en) * | 1987-08-27 | 1989-06-20 | Graham Engineering Corporation | In-mold labeling apparatus and method |
| ES2016967B3 (es) * | 1987-11-30 | 1990-12-16 | Magcon Beheer B V | Sistema de almacenaje para paletas |
| US4893074A (en) * | 1988-05-13 | 1990-01-09 | Intest Corporation | Electronic device testing system |
| DE3912589A1 (de) * | 1989-04-17 | 1990-10-25 | Ekkehard Ueberreiter | Einrichtung zum testen von elektronischen bauelementen mit einer ladestation, einer teststation und eine entladestation fuer die bauelemente |
| DE4007011C2 (de) * | 1990-03-06 | 1999-11-18 | Helmuth Heigl | Positioniervorrichtung |
| US5030869A (en) * | 1990-07-25 | 1991-07-09 | Intest Corporation | Device testing system with cable pivot |
| US5123803A (en) * | 1990-09-11 | 1992-06-23 | Crabtree George F | Stern drive handling device |
| US5241870A (en) * | 1991-07-22 | 1993-09-07 | Intest Corporation | Test head manipulator |
| US5321453A (en) * | 1991-08-03 | 1994-06-14 | Tokyo Electron Limited | Probe apparatus for probing an object held above the probe card |
| US5600258A (en) * | 1993-09-15 | 1997-02-04 | Intest Corporation | Method and apparatus for automated docking of a test head to a device handler |
| US6057695A (en) * | 1993-09-15 | 2000-05-02 | Intest Corporation | Method and apparatus for automated docking of a test head to a device handler |
| US5440943A (en) * | 1993-09-15 | 1995-08-15 | Intest Corporation | Electronic test head manipulator |
| US5744974A (en) * | 1993-09-17 | 1998-04-28 | Xilinx, Inc. | Test head interface with vacuum-activated interconnection components |
| US5379646A (en) * | 1993-09-20 | 1995-01-10 | General Motors Corporation | Seatback load applying device |
| US5561386A (en) * | 1994-02-23 | 1996-10-01 | Fujitsu Limited | Chip tester with improvements in handling efficiency and measurement precision |
| US5982182A (en) * | 1994-09-01 | 1999-11-09 | Chiu; Michael A. | Interface apparatus for automatic test equipment with positioning modules incorporating kinematic surfaces |
| US5664932A (en) * | 1994-09-20 | 1997-09-09 | Long-Airdox Company | Pivoted lifting device |
| KR960019641A (ko) * | 1994-11-24 | 1996-06-17 | 오우라 히로시 | 테스트·헤드 접속 장치를 장비한 반도체 시험 장치 |
| ATE205303T1 (de) * | 1995-02-23 | 2001-09-15 | Aesop Inc | Manipulator für einen testkopf einer automatischen testanlage |
| US5912555A (en) | 1995-04-10 | 1999-06-15 | Tokyo Electron Limited | Probe apparatus |
| US5608334A (en) * | 1995-04-20 | 1997-03-04 | Intest Corporation | Device testing system with cable pivot and method of installation |
| DE19517330C2 (de) * | 1995-05-11 | 2002-06-13 | Helmuth Heigl | Handhabungsvorrichtung |
| US5606262A (en) * | 1995-06-07 | 1997-02-25 | Teradyne, Inc. | Manipulator for automatic test equipment test head |
| US5656942A (en) * | 1995-07-21 | 1997-08-12 | Electroglas, Inc. | Prober and tester with contact interface for integrated circuits-containing wafer held docked in a vertical plane |
| US5765273A (en) * | 1995-09-22 | 1998-06-16 | Black & Decker Inc. | Drill press having pivotable table |
| US5654631A (en) * | 1995-11-15 | 1997-08-05 | Xilinx, Inc. | Vacuum lock handler and tester interface for semiconductor devices |
| US6023173A (en) * | 1997-04-30 | 2000-02-08 | Credence Systems Corporation | Manipulator with expanded range of motion |
| DE19718398B4 (de) * | 1997-04-30 | 2006-02-02 | Heigl, Helmuth, Dr.-Ing. | Handhabungsvorrichtung |
| DE29709122U1 (de) * | 1997-05-23 | 1998-09-24 | Upat Max Langensiepen Kg | Vorrichtung zum Einschrauben von Befestigungselementen |
| JP3754540B2 (ja) * | 1997-10-17 | 2006-03-15 | 蛇の目ミシン工業株式会社 | 多関節ロボットにおけるz方向機台のバネバランス調整装置 |
| US6271658B1 (en) | 1998-10-19 | 2001-08-07 | St Assembly Test Services Pte, Ltd. | Universal Docking System |
| MY138984A (en) * | 2000-03-01 | 2009-08-28 | Intest Corp | Vertical counter balanced test head manipulator |
| US6396257B1 (en) * | 2000-04-26 | 2002-05-28 | Credence Systems Corporation | Test head manipulator for semiconductor tester with manual assist for vertical test head movement |
| US6408500B1 (en) * | 2000-09-15 | 2002-06-25 | James Orsillo | Method of retrofitting a probe station |
| EP1712923B1 (en) | 2000-09-22 | 2013-05-15 | inTEST Corporation | Apparatus and method for balancing and for providing a compliant range to a test head |
| MY127154A (en) * | 2000-09-22 | 2006-11-30 | Intest Corp | Apparatus and method for balancing and for providing a compliant range to a test head |
| DE20114544U1 (de) * | 2000-12-04 | 2002-02-21 | Cascade Microtech Inc | Wafersonde |
| DE10122049B4 (de) * | 2001-05-07 | 2004-08-19 | Heigl, Helmuth, Dr.-Ing. | Vorrichtung zum Verriegeln von zwei miteinander zu koppelnden Einrichtungen, insbesondere eines Testkopfs und einer Prüfeinrichtung |
| AU2002355083A1 (en) * | 2001-07-16 | 2003-03-03 | Intest Ip Corp. | Test head docking system and method |
| US6766996B1 (en) | 2001-07-16 | 2004-07-27 | Reid-Ashman Manufacturing, Inc. | Manipulator |
| US6897645B2 (en) | 2001-12-29 | 2005-05-24 | Vincent Hing Chung So | Docking system and method for docking in automated testing systems |
| US6646431B1 (en) | 2002-01-22 | 2003-11-11 | Elite E/M, Inc. | Test head manipulator |
| US6688838B2 (en) * | 2002-03-04 | 2004-02-10 | Applied Materials, Inc. | Cleanroom lift having an articulated arm |
| CN1646925A (zh) | 2002-04-15 | 2005-07-27 | 因泰斯特Ip公司 | 测试头定位器系统 |
| KR100864916B1 (ko) * | 2002-05-23 | 2008-10-22 | 캐스케이드 마이크로테크 인코포레이티드 | 피시험 디바이스를 테스트하기 위한 프로브 |
| JP4511354B2 (ja) * | 2002-10-02 | 2010-07-28 | インテスト コーポレイション | テストヘッドを位置決めするための位置決め装置、テストヘッドを位置決めする方法、および電子テストシステムのテストヘッドのための位置決め装置 |
| JP4791350B2 (ja) * | 2003-01-28 | 2011-10-12 | インテスト コーポレイション | テストヘッドの位置決め用リストジョイント |
| US6833696B2 (en) * | 2003-03-04 | 2004-12-21 | Xandex, Inc. | Methods and apparatus for creating a high speed connection between a device under test and automatic test equipment |
| US7057404B2 (en) | 2003-05-23 | 2006-06-06 | Sharp Laboratories Of America, Inc. | Shielded probe for testing a device under test |
| EP1947466B1 (en) | 2003-08-06 | 2012-07-04 | inTEST Corporation | Test head positioning system |
| KR20060057603A (ko) * | 2003-08-06 | 2006-05-26 | 인테스트 코포레이션 | 테스트 헤드 위치지정 시스템 |
| DE20317541U1 (de) * | 2003-10-08 | 2005-02-17 | Rotwerk Elektrowerkzeuge Und Handelsmarketing Beteiligungsgesellschaft Mbh | Klemmer |
| KR100960496B1 (ko) * | 2003-10-31 | 2010-06-01 | 엘지디스플레이 주식회사 | 액정표시소자의 러빙방법 |
| US7427868B2 (en) | 2003-12-24 | 2008-09-23 | Cascade Microtech, Inc. | Active wafer probe |
| JP2008512680A (ja) | 2004-09-13 | 2008-04-24 | カスケード マイクロテック インコーポレイテッド | 両面プロービング構造体 |
| WO2006132938A2 (en) | 2005-06-03 | 2006-12-14 | Steel Case Development Corporation | Support arm assembly |
| US7312604B2 (en) * | 2005-07-29 | 2007-12-25 | Nextest Systems Corporation | Portable manipulator for stackable semiconductor test system |
| US8607935B2 (en) | 2005-12-20 | 2013-12-17 | Intuitive Surgical Operations, Inc. | Guide systems for laminated spring assemblies |
| JP2007184374A (ja) * | 2006-01-05 | 2007-07-19 | King Yuan Electronics Co Ltd | 自動昇降操作装置 |
| US20070176615A1 (en) * | 2006-01-27 | 2007-08-02 | Xandex, Inc. | Active probe contact array management |
| US20070234549A1 (en) * | 2006-03-17 | 2007-10-11 | General Electric Company | Braze/weld manipulator and method of manipulating nozzles |
| US7723999B2 (en) | 2006-06-12 | 2010-05-25 | Cascade Microtech, Inc. | Calibration structures for differential signal probing |
| US7403028B2 (en) * | 2006-06-12 | 2008-07-22 | Cascade Microtech, Inc. | Test structure and probe for differential signals |
| US7764072B2 (en) | 2006-06-12 | 2010-07-27 | Cascade Microtech, Inc. | Differential signal probing system |
| TWI439709B (zh) * | 2006-12-29 | 2014-06-01 | Intest Corp | 用於使負載沿平移軸線平移之操縱器與負載定位系統 |
| EP2104862B1 (en) * | 2006-12-29 | 2012-08-08 | inTEST Corporation | Test head positioning system and method |
| SG178722A1 (en) * | 2007-02-23 | 2012-03-29 | Intest Corp | Test head manipulator |
| US7876114B2 (en) | 2007-08-08 | 2011-01-25 | Cascade Microtech, Inc. | Differential waveguide probe |
| US7847570B2 (en) * | 2007-10-19 | 2010-12-07 | Teradyne, Inc. | Laser targeting mechanism |
| US7733081B2 (en) * | 2007-10-19 | 2010-06-08 | Teradyne, Inc. | Automated test equipment interface |
| US8212578B1 (en) | 2008-03-17 | 2012-07-03 | Intest Corporation | Test head positioner system |
| EP2300838A2 (en) * | 2008-07-14 | 2011-03-30 | Intest Corporation | Test head docking system and method |
| US8191487B2 (en) * | 2009-02-25 | 2012-06-05 | Humanscale Corporation | Wall-mounted accessory holder |
| US8099184B2 (en) * | 2009-04-13 | 2012-01-17 | Rimrock Automation, Inc. | Load compensation for robotic applications |
| US8981807B2 (en) * | 2010-07-27 | 2015-03-17 | Intest Corporation | Positioner system and method of positioning |
| CN102147270A (zh) * | 2010-12-22 | 2011-08-10 | 苏州新长光热能科技有限公司 | 工业用光电传感器安装支架 |
| WO2013009817A1 (en) | 2011-07-12 | 2013-01-17 | Intest Corporation | Method and apparatus for docking a test head with a peripheral |
| US8702049B2 (en) * | 2012-09-10 | 2014-04-22 | Benedict Vieira | Ergonomic space-saving customizable workstation |
| CN102853949A (zh) * | 2012-09-21 | 2013-01-02 | 陕西科技大学 | 一种金属件剪切力测量装置 |
| CN103624776A (zh) * | 2013-12-23 | 2014-03-12 | 镇江艾科半导体有限公司 | 控制测试头在xy平面内精确运动定位的机械手臂 |
| US10094854B2 (en) * | 2015-10-23 | 2018-10-09 | Teradyne, Inc. | Manipulator in automatic test equipment |
| CA2923047C (en) * | 2016-03-08 | 2023-06-27 | Darcy Goossen | Device for handling tires |
| FR3049040B1 (fr) * | 2016-03-18 | 2019-01-25 | Erard | Systeme support pour ecran plat et procede de mise en oeuvre |
| CN106429960B (zh) * | 2016-11-09 | 2019-06-07 | 上海卫星装备研究所 | 一种新型六自由度卫星侧板安装设备 |
| CN107718037B (zh) * | 2017-09-28 | 2021-05-04 | 南京双京电博特种机器人产业研究院有限公司 | 一种关节机器人的平衡装置 |
| US10751888B2 (en) * | 2018-10-04 | 2020-08-25 | Advanced Intelligent Systems Inc. | Manipulator apparatus for operating on articles |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2697529A (en) * | 1951-02-27 | 1954-12-21 | John P Hubbell | Apparatus for handling frangible articles by remote control |
| US3262593A (en) * | 1963-07-10 | 1966-07-26 | Gen Mills Inc | Wall-mounted support structure |
| US3791052A (en) * | 1970-01-26 | 1974-02-12 | Lely Nv C Van Der | Tractor comprising a pivotable driver seat |
| US3665148A (en) * | 1971-04-07 | 1972-05-23 | Gen Motors Corp | Six-axis manipulator |
| DE2226407C3 (de) * | 1972-05-31 | 1978-10-12 | Industrie-Werke Karlsruhe Augsburg Ag, 7500 Karlsruhe | Gerät zur maschinellen, durch veränderbare Programme steuerbaren Handreichung |
| US3873148A (en) * | 1972-12-27 | 1975-03-25 | Caterpillar Tractor Co | Vehicle frame |
| JPS50120856A (ko) * | 1974-03-09 | 1975-09-22 | ||
| US3884365A (en) * | 1974-03-19 | 1975-05-20 | Thomson Ind Inc | Workpiece manipulator |
| SE416452B (sv) * | 1975-06-16 | 1981-01-05 | Asea Ab | Industrirobot |
| FR2352640A1 (fr) * | 1976-05-24 | 1977-12-23 | Bretagne Atel Chantiers | Telemanipulateur a faible encombrement |
| DE2630857A1 (de) * | 1976-07-09 | 1978-01-12 | Volkswagenwerk Ag | Handhabungsautomat |
| US4062455A (en) * | 1976-11-22 | 1977-12-13 | Flatau Carl R | Remote manipulator |
| US4132318A (en) * | 1976-12-30 | 1979-01-02 | International Business Machines Corporation | Asymmetric six-degree-of-freedom force-transducer system for a computer-controlled manipulator system |
| DE2861285D1 (en) * | 1977-10-20 | 1982-01-14 | Ici Plc | An industrial manipulator for placing articles in close proximity to adjacent articles and a method of close packing articles therewith |
| JPS571116Y2 (ko) * | 1978-01-31 | 1982-01-08 | ||
| JPS6055003B2 (ja) * | 1978-05-29 | 1985-12-03 | 大阪機工株式会社 | 三次元形状測定装置 |
| US4303368A (en) * | 1978-09-18 | 1981-12-01 | Westinghouse Electric Corp. | Remote docking apparatus |
| FR2451807A1 (fr) * | 1979-03-22 | 1980-10-17 | Renault | Manipulateur six axes |
| US4264266A (en) * | 1979-04-20 | 1981-04-28 | Tl Systems Corporation | Manipulator apparatus |
| US4317560A (en) * | 1979-12-26 | 1982-03-02 | Troyer Wade E | Work manipulator |
| JPS56102482U (ko) * | 1979-12-29 | 1981-08-11 | ||
| GB2074337B (en) * | 1980-04-15 | 1983-11-16 | Univ Technology | Adjustable support for an optical or other instrument |
| JPS575471A (en) * | 1980-06-12 | 1982-01-12 | Matsushita Electric Ind Co Ltd | Synchronism separator |
| JPS5773601A (en) * | 1980-10-27 | 1982-05-08 | Mitsutoyo Mfg Co Ltd | Balance device of measuring machine |
| DE3048045C2 (de) * | 1980-12-19 | 1984-12-06 | Mora Fabrik für Meßgeräte Helmut Freund GmbH, 8750 Aschaffenburg | Höhenmeß- und Anreißgerät mit einer von einem Gerätefuß aufragenden Gerätesäule |
| US4389155A (en) * | 1981-05-11 | 1983-06-21 | Absher Charles A | Tractor scoop mechanism |
-
1982
- 1982-08-25 US US06/411,311 patent/US4527942A/en not_active Expired - Lifetime
-
1983
- 1983-08-11 US US06522635 patent/US4589815B1/en not_active Expired - Lifetime
- 1983-08-24 KR KR1019830003961A patent/KR870001754B1/ko not_active IP Right Cessation
- 1983-08-25 JP JP58154237A patent/JPS5960206A/ja active Granted
-
1991
- 1991-05-22 JP JP14519091A patent/JPH06100634B2/ja not_active Expired - Lifetime
- 1991-05-22 JP JP14519191A patent/JP2513362B2/ja not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| US4589815A (en) | 1986-05-20 |
| JP2513362B2 (ja) | 1996-07-03 |
| KR840005699A (ko) | 1984-11-15 |
| JPS5960206A (ja) | 1984-04-06 |
| JPH06100634B2 (ja) | 1994-12-12 |
| JPH0461281B2 (ko) | 1992-09-30 |
| JPH05126902A (ja) | 1993-05-25 |
| US4527942A (en) | 1985-07-09 |
| US4589815B1 (en) | 1998-04-07 |
| JPH05126903A (ja) | 1993-05-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR870001754B1 (ko) | 시험 시스템용 전자 시험 헤드 포지셔너 시스템 | |
| US4705447A (en) | Electronic test head positioner for test systems | |
| US5149029A (en) | Electronic test head positioner for test systems | |
| US5241870A (en) | Test head manipulator | |
| EP0102217B1 (en) | Electronic test head positioner for test systems | |
| US4588346A (en) | Positioner for maintaining an object in a substantially weightless condition | |
| EP0643308B1 (en) | Electronic test head manipulator | |
| US4437151A (en) | Coordinate measuring machine inspection and adjustment method | |
| US5606262A (en) | Manipulator for automatic test equipment test head | |
| US20060001416A1 (en) | Test head positioner system | |
| KR0167780B1 (ko) | 케이블 피벗을 갖는 장치 테스트 시스템 | |
| EP0237698A2 (en) | Electronic test head positioner for test systems | |
| JPH08220190A (ja) | デバイスハンドラーへの試験ヘッドの自動ドッキング方法及び装置 | |
| US5608334A (en) | Device testing system with cable pivot and method of installation | |
| KR20010012130A (ko) | 동작범위가 넓은 매니퓰레이터 | |
| WO2010009013A2 (en) | Test head docking system and method | |
| US8350584B2 (en) | Test head positioning system and method | |
| EP0237697A2 (en) | Electronic test head positioner for test systems | |
| US6310486B1 (en) | Integrated test cell | |
| US4950982A (en) | Electric probing test machine | |
| EP1601980B1 (en) | Wrist joint for positioning a test head | |
| JP4443937B2 (ja) | テスター位置決めについてコンプライアンスを有する自動試験システム及びそれを作動させる方法 | |
| SU765738A1 (ru) | Наклонно-поворотный стенд |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| G160 | Decision to publish patent application | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20020930 Year of fee payment: 16 |
|
| EXPY | Expiration of term |