KR20200047597A - 반도체 웨이퍼를 세정하기 위한 방법 및 장치 - Google Patents
반도체 웨이퍼를 세정하기 위한 방법 및 장치 Download PDFInfo
- Publication number
- KR20200047597A KR20200047597A KR1020207008450A KR20207008450A KR20200047597A KR 20200047597 A KR20200047597 A KR 20200047597A KR 1020207008450 A KR1020207008450 A KR 1020207008450A KR 20207008450 A KR20207008450 A KR 20207008450A KR 20200047597 A KR20200047597 A KR 20200047597A
- Authority
- KR
- South Korea
- Prior art keywords
- cleaning tank
- wafer
- chemical solution
- cleaning
- tank
- Prior art date
Links
Images


















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02041—Cleaning
- H01L21/02057—Cleaning during device manufacture
- H01L21/0206—Cleaning during device manufacture during, before or after processing of insulating layers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67028—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
- H01L21/6704—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing
- H01L21/67057—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing with the semiconductor substrates being dipped in baths or vessels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/04—Cleaning involving contact with liquid
- B08B3/048—Overflow-type cleaning, e.g. tanks in which the liquid flows over the tank in which the articles are placed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B3/00—Cleaning by methods involving the use or presence of liquid or steam
- B08B3/04—Cleaning involving contact with liquid
- B08B3/10—Cleaning involving contact with liquid with additional treatment of the liquid or of the object being cleaned, e.g. by heat, by electricity or by vibration
- B08B3/12—Cleaning involving contact with liquid with additional treatment of the liquid or of the object being cleaned, e.g. by heat, by electricity or by vibration by sonic or ultrasonic vibrations
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/02041—Cleaning
- H01L21/02101—Cleaning only involving supercritical fluids
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/6719—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the processing chambers, e.g. modular processing chambers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67754—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber horizontal transfer of a batch of workpieces
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67757—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber vertical transfer of a batch of workpieces
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B2240/00—Type of materials or objects being cleaned
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/673—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere using specially adapted carriers or holders; Fixing the workpieces on such carriers or holders
Abstract
하나의 세정 탱크로부터 다른 세정 탱크로 화학 용액에 침지하는 웨이퍼를 보장하는 장치 및 방법이 제공된다. 상기 장치는 내부 탱크(1001); 상기 내부 탱크를 화학 용액으로 채워진 적어도 2개의 세정 탱크로 분할하는 적어도 하나의 분할기(1002); 및 제1 세정 탱크(1011)로부터 제2 세정 탱크(1012)로 웨이퍼를 파지하여 취하기 위한 적어도 한 쌍의 엔드 이펙터(1051)를 구비한 제1 로봇(1005)을 포함하며, 각각의 세정 탱크는 웨이퍼를 보유하기 위해 바닥 내의 카세트 브래킷(1003)을 구비하고, 상기 적어도 하나의 분할기(1002)는 적어도 하나의 슬롯(1004)을 구비하며, 상기 제1 로봇(1005)은 웨이퍼의 침지를 유지하면서 슬롯(1004)을 통해 제1 세정 탱크(1011)로부터 제2 세정 탱크(1012)로 웨이퍼를 파지하여 취한다.
Description
본 발명은 일반적으로 반도체 소자 제조의 분야에 관한 것으로, 보다 상세하게는 반도체 웨이퍼를 세정하기 위한 방법 및 장치에 관한 것이다.
집적 회로 제조 공정 동안, 습식 세정 공정은 고품질 집적 회로를 얻기 위해 필수적이다. 건식 에칭 공정 후에, 웨이퍼는 잔류 포토레지스트, 건식 에칭 공정 동안 생성된 유기물, 및 웨이퍼의 표면 상에 부착된 막 재료를 제거하기 위해 세정될 필요가 있다. 웨이퍼를 세정하기 위한 주요 화학 용액은 SC1, BOE 및 H2SO4과 H2O2의 혼합물인 SPM을 포함한다. 여기서, SPM의 온도는 90℃보다 높고, SPM은 잔류 포토레지스트 및 유기물을 제거하는데 사용된다. 일반적으로, 웨이퍼를 세정하기 위한 2가지 방법이 있다. 하나는 배치 세정(batch cleaning)이고, 다른 하나는 단일 웨이퍼 세정(single wafer cleaning)이며, 이들 모두는 상대적으로 설명될 것이다.
배치 세정은 매 시간마다 복수의 웨이퍼를 세정할 수 있다. 배치 세정을 위한 장치는 기계적 이송 장치 및 몇 개의 세정 탱크를 구비한다. 또한, 세정 탱크 중 하나에서 복수의 웨이퍼를 동시에 세정할 수 있으므로, 배치 세정의 효율이 높고, 약 400개의 웨이퍼가 시간당 세정될 수 있다. 또한, 세정 탱크 내의 화학 용액이 순환되기 때문에, 화학 용액이 재사용될 수 있고, 고온 SPM이 그 농도 및 온도를 블렌딩하고 제어하기 더 어렵기 때문에, 특히 고온 화학 용액, 예컨대 120℃ SPM에 대해 배치 세정의 비용이 감소된다. 배치 세정을 이용하여 세정 비용을 감소시킬 수 있다. 그러나, 집적 회로의 라인 폭이 연속적으로 축소됨에 따라, 배치 세정의 단점은 가시적으로 노출된다. 배치 세정 공정 동안, 웨이퍼는 하나의 세정 탱크로부터 다른 세정 탱크로 회수될 필요가 있다. 이때, 세정 탱크 내의 화학 용액이 유기 잔류물, 유기 오염물, 입자와 같은 약간의 작은 불순물을 갖는다면, 작은 불순물은 화학 용액과 함께 웨이퍼의 표면에 부착될 것이다. 일단 웨이퍼가 건조되거나 임의의 가스상 분위기에 노출되면, 웨이퍼 상의 작은 유기 오염물은 제거하기에 매우 어렵다.
단일 웨이퍼 세정은 매 시간마다 한 피스의 웨이퍼만을 세정할 수 있다. 단일 웨이퍼 세정 장치는 기계적 이송 장치 및 몇 개의 독립적인 단일 웨이퍼 세정 모듈을 포함한다. 하나의 웨이퍼 세정 모듈에서 하나의 웨이퍼의 세정 및 건조 공정이 완료된다. 한 피스의 웨이퍼를 세정한 후, 단일 웨이퍼 세정 모듈 내의 화학 용액이 배출되고, 새로운 화학 용액이 공급되어 또 다른 피스의 웨이퍼를 세정하여, 교차 오염물이 회피된다. 단일 웨이퍼 세정은 입자 및 막 재료를 효과적으로 제거할 수 있다. 그러나, 단일 웨이퍼 세정은 고온 화학 용액이 재순환되기 어렵기 때문에, 온도가 90℃보다 높은 SPM과 같은 고온 화학 용액의 사용에 있어서 한계를 갖는다.
배치 세정 및 단일 웨이퍼 세정 모두는 그 자체의 장점 및 단점을 갖는다. 따라서, 배치 세정 및 단일 웨이퍼 세정의 장점을 결합하는 새로운 장치 및 방법은 집적 회로 제조 공정에 큰 기여가 될 것이다.
따라서, 본 발명의 목적은 하나의 세정 탱크로부터 다른 세정 탱크로 화학 용액에 침지하는 웨이퍼를 보장하는 장치 및 방법을 제공한다.
일 실시예에서, 상기 장치는 내부 탱크; 상기 내부 탱크를 화학 용액으로 채워진 적어도 2개의 세정 탱크로 분할하는 적어도 하나의 분할기; 제1 세정 탱크로부터 제2 세정 탱크로 웨이퍼를 파지하여 취하기 위한 적어도 한 쌍의 엔드 이펙터를 구비한 제1 로봇을 포함하며, 각각의 세정 탱크는 웨이퍼들을 보유하기 위해 바닥에 카세트 브라켓을 구비하고, 상기 적어도 하나의 분할기는 적어도 하나의 슬롯을 구비하고, 상기 제1 로봇은 상기 웨이퍼를 상기 화학 용액에 침지시키는 동안 상기 슬롯을 통해 상기 제1 세정 탱크로부터 상기 제2 세정 탱크로 웨이퍼를 파지하여 취한다.
일 실시예에 따르면, 반도체 웨이퍼를 세정하기 위한 방법은 하기의 단계, 즉
적어도 하나의 웨이퍼를 화학 용액으로 충전된 제1 세정 탱크 내의 카세트 브래킷 상에 두는 단계;
상기 웨이퍼가 상기 제1 세정 탱크에서 처리된 후, 상기 웨이퍼가 상기 화학 용액에 침지된 상태로 상기 제1 세정 탱크로부터 제2 세정 탱크로 상기 웨이퍼를 이송하는 단계; 및
상기 웨이퍼가 상기 제2 세정 탱크에서 처리된 후에, 상기 웨이퍼를 상기 탱크 외부로 꺼내는 단계
를 구비한다.
본 발명은 웨이퍼를 이송하기 위해 분할기 내의 몇 개의 슬롯을 이용하여, 웨이퍼가 하나의 탱크로부터 다른 탱크로 화학 용액을 침지시키는 것을 보장한다.
도 1a-1c는 이송 공정 동안 웨이퍼를 세정하기 위한 예시적인 장치를 도시하는 단면도를 도시한다.
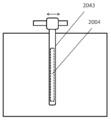
도 2a는 하나의 슬롯을 갖는 예시적인 분할기를 도시하는 단면도를 도시한다.
도 2b는 도어가 개방 상태에 있을 때 하나의 슬롯을 갖는 예시적인 분할기를 도시한다.
도 2c는 도어가 폐쇄 상태에 있을 때 하나의 슬롯을 갖는 예시적인 분할기를 도시한다.
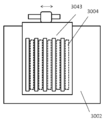
도 3a는 하나 이상의 슬롯을 갖는 다른 예시적인 분할기를 도시하는 단면도이다.
도 3b는 도어가 개방 상태에 있을 때 하나 이상의 슬롯을 갖는 다른 예시적인 분할기를 도시한다.
도 3c는 도어가 폐쇄 상태에 있을 때 하나 이상의 슬롯을 갖는 다른 예시적인 분할기를 도시한다.
도 4a는 수직 슬롯 및 슬롯에 대응하는 로봇을 갖는 분할기를 도시하는 측면도를 도시한다.
도 4b는 수평 슬롯 및 슬롯에 대응하는 로봇을 갖는 분할기를 도시하는 측면도를 도시한다.
도 4c는 수평에 대한 각도를 갖는 슬롯 및 슬롯에 대응하는 로봇을 갖는 분할기를 도시하는 측면도를 도시한다.
도 5는 외부 세정 탱크를 갖는 예시적인 장치를 도시하는 단면도를 도시한다.
도 6a는 세정 공정 동안 웨이퍼를 세정하기 위한 예시적인 장치를 도시하는 단면도를 도시한다.
도 6b는 세정 공정 동안 웨이퍼를 세정하기 위한 예시적인 장치의 자기 구동 구조체를 도시하는 측면도를 도시한다.
도 7은 본 발명에 따른 반도체 웨이퍼를 세정하기 위한 다른 예시적인 장치를 도시하는 단면도이다.
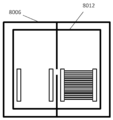
도 8a-8f는 예시적인 웨이퍼 세정 방법을 도시한다.
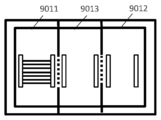
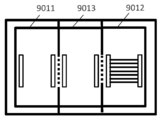
도 9a-9c는 다른 예시적인 웨이퍼 세정 방법을 도시한다.
도 2a는 하나의 슬롯을 갖는 예시적인 분할기를 도시하는 단면도를 도시한다.
도 2b는 도어가 개방 상태에 있을 때 하나의 슬롯을 갖는 예시적인 분할기를 도시한다.
도 2c는 도어가 폐쇄 상태에 있을 때 하나의 슬롯을 갖는 예시적인 분할기를 도시한다.
도 3a는 하나 이상의 슬롯을 갖는 다른 예시적인 분할기를 도시하는 단면도이다.
도 3b는 도어가 개방 상태에 있을 때 하나 이상의 슬롯을 갖는 다른 예시적인 분할기를 도시한다.
도 3c는 도어가 폐쇄 상태에 있을 때 하나 이상의 슬롯을 갖는 다른 예시적인 분할기를 도시한다.
도 4a는 수직 슬롯 및 슬롯에 대응하는 로봇을 갖는 분할기를 도시하는 측면도를 도시한다.
도 4b는 수평 슬롯 및 슬롯에 대응하는 로봇을 갖는 분할기를 도시하는 측면도를 도시한다.
도 4c는 수평에 대한 각도를 갖는 슬롯 및 슬롯에 대응하는 로봇을 갖는 분할기를 도시하는 측면도를 도시한다.
도 5는 외부 세정 탱크를 갖는 예시적인 장치를 도시하는 단면도를 도시한다.
도 6a는 세정 공정 동안 웨이퍼를 세정하기 위한 예시적인 장치를 도시하는 단면도를 도시한다.
도 6b는 세정 공정 동안 웨이퍼를 세정하기 위한 예시적인 장치의 자기 구동 구조체를 도시하는 측면도를 도시한다.
도 7은 본 발명에 따른 반도체 웨이퍼를 세정하기 위한 다른 예시적인 장치를 도시하는 단면도이다.
도 8a-8f는 예시적인 웨이퍼 세정 방법을 도시한다.
도 9a-9c는 다른 예시적인 웨이퍼 세정 방법을 도시한다.
이하, 첨부된 도면을 참조하여 본 발명의 바람직한 실시예를 상세히 설명하기로 한다. 설명된 본 발명의 실시예는 하기의 상세한 설명에 개시된 정확한 형태들로 본 발명을 제한하지 않는다.
도 1a는 본 발명에 따른 반도체 웨이퍼를 세정하기 위한 예시적인 장치를 도시하는 단면도이다. 반도체 웨이퍼 세정 장치는 내부 탱크(1001); 내부 탱크(1001)를 화학 용액으로 채워진 적어도 2개의 세정 탱크로 분할하는 적어도 하나의 분할기(1002); 및 제1 세정 탱크(1011)로부터 제2 세정 탱크(1012)로 웨이퍼를 파지하여 취하기 위한 적어도 한 쌍의 엔드 이펙터(1051)를 구비한 제1 로봇(1005)을 포함하며, 각각의 세정 탱크는 웨이퍼를 보유하기 위한 바닥에 카세트 브래킷(1003)을 구비하고, 적어도 하나의 분할기(1002)는 적어도 하나의 슬롯(1004)을 구비하고, 제1 로봇(1005)은 웨이퍼를 화학 용액에 침지 유지하는 동안에 슬롯(1004)을 통해 제1 세정 탱크(1011)로부터 제2 세정 탱크(1012)로 웨이퍼를 파지하여 취한다.
세정 탱크 내의 화학 용액은 고온 SPM이고, 고온 SPM 의 온도는 80℃-250℃이다. 상이한 세정 탱크 내의 화학 용액의 온도는 동일하거나 그렇지 않다. SPM은 H2SO4와 H2O2의 혼합물이고, H2O2 대 H2SO4의 비는 1:1 내지 1:100 이다. 상이한 세정 탱크 내의 화학 용액의 농도는 동일하거나 그렇지 않다.
제2 세정 탱크(1012)로 흐르는 제1 세정 탱크(1011) 내의 더러운 화학 용액을 회피하기 위해, 제1 세정 탱크(1011)의 높이가 제2 세정 탱크(1012)보다 낮은 상이한 액체 레벨을 2개의 세정 탱크가 갖는다. 제1 세정 탱크(1011)와 제2 세정 탱크(1012) 간의 액체 레벨 차이로 인해, 제2 세정 탱크(1012) 내의 화학 용액의 압력(P2)은 제1 세정 탱크(1011) 내의 화학 용액의 압력(P1)보다 높고, 제1 세정 탱크(1011)와 제2 세정 탱크(1012) 사이에 바이어스 압력(ΔP=P2-P1>0)이 형성된다. 바이어스 압력(ΔP)으로 인해, 제2 세정 탱크(1012)의 화학 용액은 제1 세정 탱크(1011)로 흐르도록 의도된다. 그리고, 제2 세정 탱크(1012)는 제2 세정 탱크(1012)로 신선한 화학 용액을 공급하여 2개의 세정 탱크들 간의 액체 레벨 차이를 유지하도록 하는 입구(1013)를 구비한다.
상기 장치는 외부 탱크(100)를 더 포함한다. 각각의 세정 탱크는 재순환 시스템을 통해 외부 탱크(1006)에 개별적으로 연결된다. 제1 세정 탱크(1011)에 연결된 재순환 시스템은 입구 노즐(1071), 출구(1072), 펌프(1073) 및 필터(10774)를 포함한다. 입구 노즐(1071)은 제1 세정 탱크(1011)의 바닥에 있고, 출구(1072)는 외부 탱크(1006)의 바닥에 있다. 제2 세정 탱크(1012)에 연결된 재순환 시스템은 입구 노즐(1081), 출구(1082), 펌프(1083), 필터(1084) 및 밸브(10855)를 포함한다. 입구 노즐(1081)은 제2 세정 탱크(1012)의 바닥에 있고, 출구(1082)는 외부 탱크(1006)의 바닥에 있다. 밸브(1085)는 화학 용액의 공급을 제어하기 위해 분할기(1002) 내의 액체 채널(1042)에 연결된다. 세정 공정에서, 제1 세정 탱크(1011) 내의 화학 용액은 점점 더 더러워진다. 제1 세정 탱크(1011) 내의 더러운 화학 용액은 외부 탱크(1006)로 오버플로우하고, 외부 탱크(1006) 내의 더러운 액체 화학물은 출구(1072)를 통해 재순환 시스템으로 흐른다. 재순환 시스템은 필터(1074)에 의해 더러운 화학 용액을 정화하고, 깨끗한 화학 용액이 펌프(1073)에 의해 입구 노즐(1071)을 통해 세정 탱크로 다시 분무될 것이다. 이러한 방식으로, 세정 탱크 내의 화학 용액은 항상 청결하게 유지될 것이다. 또한, 분할기(1002)의 높이는 2개의 세정 탱크 사이의 교차 오염을 피하기 위한 세정 탱크의 높이보다 낮지 않다.
외부 탱크(1006)는 센서(1061)와, 센서(106) 아래의 드레인(1062)을 더 포함한다. 센서(1061)는 외부 탱크(100) 내의 화학 용액의 액체 레벨을 검출하는데 사용된다. 입구(1013)는 신선한 화학 용액을 제2 세정 탱크(1012)에 연속적으로 공급하고, 제2 세정 탱크(1012) 내의 화학 용액은 제1 세정 탱크(1011)로 흐르고, 이어서 제1 세정 탱크(1011) 내의 화학 용액은 외부 탱크(1006)로 오버플로우한다. 센서(1061)가 규정된 높이까지 상승하는 액체 레벨을 검출할 때, 드레인(1062)은 액체 레벨이 규정된 높이보다 낮을 때까지 화학 용액을 드레인하도록 개방될 것이다.
도 1a-1c는 제1 로봇(1005)의 작업 공정을 도시한다. 세정 공정이 완료된 후, 제1 로봇(1005)을 2개의 인접한 세정 탱크에 넣는다. 각 쌍의 엔드 이펙터(1051)는 2개의 인접한 세정 탱크를 가로질러 배치된다. 여러 쌍의 엔드 이펙터(1051)는 웨이퍼를 동시에 파지하며, 제1 로봇(1005)은 웨이퍼를 소정 높이로 들어올린다. 그 다음, 제1 로봇(1005)은 분할기(1002) 내의 슬롯(1004)을 통해 제1 세정 탱크(1011)로부터 제2 세정 탱크(1012)로 웨이퍼를 취하도록 웨이퍼와 수평으로 이동한다. 제1 로봇(1005)에 의해 웨이퍼를 하강하여 제2 세정 탱크 내의 카세트 브라켓(1003)에 웨이퍼를 올려놓는다.
슬롯(1004)을 갖는 분할기(1002)는 웨이퍼가 하나의 탱크로부터 다른 탱크로 이송되는 동안 임의의 가스상 분위기에 노출되는 것을 방지하지만, 제1 세정 탱크(1011) 내의 더러운 화학 액체는 슬롯을 통해 제2 세정 탱크(1012)로 흐를 것이다. 도 2a는 하나의 슬롯(2004)을 갖는 예시적인 분할기(102)를 도시하는 단면도를 도시한다. 슬롯(2004)의 측벽은 노즐(2041)의 어레이를 갖는다. 노즐(2041)은 액체 채널(2042)을 통해 재순환 시스템으로부터 화학 용액을 공급받으며, 재순환 시스템의 밸브는 개방 상태를 유지한다. 웨이퍼가 슬롯(2004)을 통과할 때, 웨이퍼의 양면이 노즐(2041)로부터 신선한 화학 용액에 의해 분무될 것이다. 또한, 노즐(2041)로부터 분무된 화학 용액은 슬롯(2004)을 차단하는 액체 커튼을 형성할 것이고, 액체 커튼은 슬롯(2004)을 통해 깨끗한 화학 용액으로 유동하는 더러운 화학 용액을 방지할 것이다. 그리고, 2개의 세정 탱크들 사이의 압력 바이어스는 제1 세정 탱크로부터 제2 세정 탱크로 더러운 화학 용액의 흐름을 최소화하는데 기여한다. 상기 장치는 도 2b 및 도 2c와 같은 예시적인 슬롯 도어(2043)를 더 포함한다. 슬롯 도어(2043)는 슬롯(2004)을 밀봉 또는 개방하기 위한 구동 장치에 의해 구동된다. 웨이퍼가 처리되었을 때, 슬롯 도어(2043)를 개방한 다음, 노즐(2041)로부터 화학 용액을 분무하고 웨이퍼를 하나씩 이송한다. 다른 경우에, 슬롯 도어(2043)는 폐쇄된다.
도 3a는 하나 이상의 슬롯(3004)을 갖는 다른 예시적인 분할기(3002)를 도시하는 단면도를 도시한다. 모든 슬롯(3004)의 측벽은 노즐(3041)의 어레이를 갖는다. 노즐(3041)은 액체 채널(3042)을 통해 재순환 시스템으로부터 화학 용액을 공급받으며, 재순환 시스템의 밸브는 개방된 상태를 유지한다. 웨이퍼가 슬롯(3004)을 통과할 때, 웨이퍼의 양면이 노즐(3041)로부터 신선한 화학 용액에 의해 분무될 것이다. 또한, 노즐(3004)로부터 분무된 화학 용액은 슬롯(3004)을 차단하는 액체 커튼을 형성할 것이고, 액체 커튼은 슬롯(3004)을 통해 깨끗한 화학 용액으로 흐르는 더러운 화학 용액을 방지할 것이다. 그리고, 2개의 세정 탱크들 사이의 압력 바이어스는 제1 세정 탱크로부터 제2 세정 탱크로 더러운 화학 용액의 흐름을 최소화하는데 기여한다. 더러운 화학 용액이 깨끗한 화학 용액 내로 흐르는 것을 회피하도록 모든 슬롯(3004)을 더욱 차단하기 위해, 장치는 도 3b 및 도 3c와 같은 다른 예시적인 슬롯 도어(3043)를 더 포함한다. 슬롯 도어(3043)는 몇 개의 개구(3044)를 가지며, 개구(3044)의 개수는 분할기(3003) 내의 슬롯(3004)의 개수보다 많지 않다. 개구(3044)의 크기는 분할기(3002) 내의 슬롯(3004)의 크기보다 작다. 슬롯 도어(3043)는 슬롯(3004)을 밀봉 또는 개방하기 위한 구동 장치에 의해 구동된다. 웨이퍼가 처리되었을 때, 개구(3044)가 슬롯(3004)과 중첩될 때까지 슬롯 도어(3043)를 이동시키고, 이어서 노즐(3041)로부터 화학 용액을 분무하여 웨이퍼를 이송한다. 다른 경우에, 슬롯(3004)및 개구(3044)는 엇갈리게 배치된다.
만약 제1 로봇이 한 쌍의 엔드 이펙터를 구비한다면, 웨이퍼는 하나씩 이송될 것이다. 이송 효율을 증가시키기 위해, 엔드 이펙터의 쌍의 개수는 모든 웨이퍼가 한 번에 이송될 수 있는 웨이퍼의 개수와 동일하다. 바람직하게, 엔드 이펙터의 쌍의 개수는 5 내지 25이다. 제1 로봇의 형상은 도 4a-4c와 같이 갈퀴와 같다. 제1 로봇은 제1 로봇을 구동하여 상하로 이동시키는 구동 장치(4052)를 포함한다. 제1 로봇은 제1 세정 탱크로부터 제2 세정 탱크로 웨이퍼를 파지하여 취하기 위해 사용된다. 제1 로봇의 형상은 하나의 슬롯을 통해 엔드 이펙터(4051)의 모든 쌍에 도움이 되므로, 엔드 이펙터(4051)의 쌍의 개수는 슬롯의 개수보다 많지 않을 수 있다. 도 4a-4c는 상이한 방향으로 슬롯을 갖는 분할기 및 슬롯에 대응하는 로봇을 도시하는 측면도를 도시한다. 도 4a는 슬롯(4004)이 수직이고, 엔드 이펙터(4051)의 방향이 수직인 것을 도시한다. 엔드 이펙터(4051)의 쌍의 개수는 5이고, 슬롯들(4004)의 개수는 5이다. 이 경우, 웨이퍼는 카세트 브라켓 상에 수직으로 배치되고, 입구 노즐은 세정 탱크의 바닥에 배치된다. 도 4b는 슬롯(4004)이 수평이고, 엔드 이펙터(4051)의 방향이 수평인 것을 도시한다. 엔드 이펙터들(4051)의 쌍의 개수는 5이고, 슬롯(4004)의 개수는 5이다. 이 경우, 웨이퍼는 카세트 브라켓 상에 수평으로 배치되고, 입구 노즐은 세정 탱크의 측벽에 배치된다. 도 4c는 슬롯(4004)이 수평에 대한 각도를 갖고, 엔드 이펙터(4051)의 방향이 슬롯(4004)과 동일한 것을 도시한다. 엔드 이펙터(4051)의 쌍의 개수는 5이고, 슬롯(4004)의 개수는 5이다. 이 경우, 웨이퍼는 카세트 브라켓 상의 수평에 대해 비스듬하게 배치된다. 수평에 대한 웨이퍼의 각도는 수평에 대한 슬롯(4004)의 각도와 동일하며, 입구 노즐은 수평에 대한 각도로 지향하고 있다.
제1 로봇이 소정 높이까지 웨이퍼를 취하기만 할 수 있음을 고려하여, 상기 장치는 웨이퍼를 로딩 및 언로딩하기 위한 제2 로봇(5008)을 포함한다. 도 5는 외부 세정 탱크를 갖는 예시적인 장치를 도시하는 단면도이다. 세정 공정이 시작되기 전에, 제2 로봇(5008)에 의해 세정 탱크 내의 카세트 브래킷(5003) 상에 웨이퍼들을 넣는다. 총 세정 공정이 완료된 후에, 제2 로봇(5008)에 의해 세정 탱크 외부로 웨이퍼를 꺼낸다. 제2 로봇(5008)은 비작동 상태에서 외부 세정 탱크(5009)에 배치된다. 외부 세정 탱크(5009)의 측벽은 제2 로봇(5008)을 플러싱하기 위한 DI수 또는 신선한 화학 용액을 분무하는 몇 개의 분무기(5091)를 갖는다. 외부 세정 탱크(5009)는 더러운 화학 용액을 배출하기 위해 외부 세정 탱크(5009)의 바닥에 위치된 배출구(5092)을 갖는다. 또한, 외부 세정 탱크(5009)는 제1 로봇(5005)을 세정하는데 사용된다.
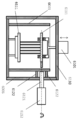
도 6a는 세정 공정 동안 웨이퍼를 세정하기 위한 예시적인 장치를 도시하는 단면도를 도시한다. 각각의 세정 탱크는 세정 공정에서 장치의 다른 영역으로 화학 용액 누설 또는 화학 증기가 진행하는 것을 회피하기 위한 커버 플레이트(6110)를 갖는다. 커버 플레이트(6110)는 커버 플레이트(6110)를 상하로 구동하기 위한 실린더(6101)를 구비한다. 입구 노즐에서 분무되는 유체 흐름이 세정 탱크 외부로 나갈 때, 흐름 순환은 카세트 브라켓 상의 웨이퍼의 진동을 유발한다. 진동은 웨이퍼가 카세트 브라켓 상에서 상하로 바운싱되도록 하며, 이는 웨이퍼와 카세트 브라켓 사이의 접촉 지점 상의 결함을 초래한다. 이러한 문제를 해결하기 위해, 웨이퍼는 3개의 스틱(6111)에 의해 고정된다. 3개의 스틱(6111) 중 하나는 커버 플레이트(6110)와 연결되어, 커버 플레이트(6110)와 연결된 스틱(6111)은 웨이퍼 상에서 가압되어 웨이퍼를 카세트 브래킷 상에 안착시키도록 클램핑한다. 다른 2개의 스틱(6111)은 웨이퍼를 수평방향으로 로킹하기 위해 카세트 브래킷 상에 위치된다. 웨이퍼 및 2개의 스틱의 접촉 지점은 세정 공정에서 바운싱 결함을 가질 것이다. 바운싱 결함을 감소시키기 위해, 커버 플레이트(6110)와 연결된 스틱(6111)은 회전 기구(6112)에 의해 구동 롤러로서 회전하고, 다른 스틱은 도 6a와 같이 웨이퍼를 함께 회전시키기 위해 구동 롤러에 의해 종속 롤러로서 회전할 수 있다. 회전 기구(6112)는 자기부(6121)를 가지며, 자기측(6121)은 자기 재료로 제조된다. 자기부(6121)는 외부 탱크(6006)로 들어가고, 자기부(6121)는 자기부(6121)와 접촉하는 화학 용액을 피하기 위한 한정된 공간을 형성하도록 그 주위에 여러 개의 구획부(6122)를 갖는다. 자기부(6121) 근방의 커버 플레이트와 연결된 스틱(6111)의 단부는 자기 재료로 제조된다. 커버 플레이트와 연결된 스틱(6111)과 자기부(6121)는 동일한 특성을 갖는 자기 재료를 사용한다. 자기부(6121)를 회전시켜서 스틱(6111)의 회전 구동시키고, 스틱(6111)의 회전을 통해 웨이퍼를 회전시킨다.
도 7은 본 발명에 따른 반도체 웨이퍼를 세정하기 위한 다른 예시적인 장치를 도시하는 단면도이다. 반도체 웨이퍼를 세정하기 위한 장치는 내부 탱크(7001)로서, 그 탱크를 화학 용액으로 채워진 2개의 세정 탱크로 분할하는 하나의 분할기(7002)를 갖는, 내부 탱크(7001); 웨이퍼를 보유하기 위해 모든 세정 탱크의 바닥에 위치된 카세트 브래킷(7003); 분할기(7002) 내의 적어도 하나의 슬롯(7004); 및 웨이퍼를 화학 용액 내에 침지한 상태에서 슬롯(7004)을 통해 제1 세정 탱크로부터 제2 세정 탱크로 적어도 하나의 웨이퍼를 파지하여 취하도록 한 쌍의 엔드 이펙터(7051)를 구비한 로봇(7005)을 포함한다. 슬롯(7004)은 로봇(7005)이 웨이퍼를 로딩 및 언로딩할 수 있는 상부 분할기(7002)를 통해 절단된다.
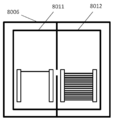
도 8a-8f는 예시적인 웨이퍼 세정 방법을 도시한다. 반도체 웨이퍼를 세정하기 위한 예시적인 방법은,
적어도 하나의 웨이퍼를 화학 용액으로 충전된 제1 세정 탱크(8011) 내의 카세트 브래킷 상에 두는 단계;
상기 웨이퍼가 제1 세정 탱크(8011)에서 처리된 후, 제1 세정 탱크(8011)로부터 화학 용액에 침지되는 웨이퍼를 갖는 제2 세정 탱크(8012)로 웨이퍼를 이송하는 단계; 및
상기 웨이퍼가 제2 세정 탱크(8012)에서 처리된 후에, 상기 웨이퍼를 상기 탱크 외부로 꺼내는 단계
를 포함한다.
도 8a-8f에 도시된 바와 같이, 웨이퍼의 이송 방법은 제1 세정 탱크(8011)로부터 제2 세정 탱크(8012)로 웨이퍼를 하나씩 취출하는 것이다. 이송 공정에서, 제1 세정 탱크(8011)와 제2 세정 탱크(8012) 사이에 액체 커튼을 형성하도록 화학 용액을 분무한다.
도 9a-9c는 예시적인 웨이퍼 세정 방법을 도시한다. 반도체 웨이퍼를 세정하기 위한 예시적인 방법은,
적어도 하나의 웨이퍼를 화학 용액으로 채워진 제1 세정 탱크(9011) 내의 카세트 브래킷 상에 두는 단계;
상기 웨이퍼가 제1 세정 탱크(9011) 내에서 처리된 후, 제1 세정 탱크(9011)로부터 제3 세정 탱크(9013)로 웨이퍼를 이송하는 단계;
상기 웨이퍼가 제3 세정 탱크(9013) 내에서 처리된 후에, 제3 세정 탱크(9013)로부터 화학 용액 내에 침지하는 웨이퍼를 갖는 제2 세정 탱크(9012)로 웨이퍼를 이송하는 단계; 및
상기 웨이퍼가 제2 세정 탱크(9012) 내에서 처리된 후에, 웨이퍼를 탱크 외부로 꺼내는 단계
를 포함한다.
도 9a-9c에 도시된 바와 같이, 웨이퍼의 이송 방법은 한 번에 하나의 세정 탱크로부터 다른 세정 탱크로 모든 웨이퍼를 취하는 것이다. 이송 공정에서, 각각의 2개의 세정 탱크들 사이에 액체 커튼을 형성하도록 화학 용액을 분무한다.
Claims (36)
- 반도체 웨이퍼를 세정하기 위한 장치에 있어서,
내부 탱크;
상기 내부 탱크를 화학 용액으로 채워진 적어도 2개의 세정 탱크로 분할하는 적어도 하나의 분할기;
제1 세정 탱크로부터 제2 세정 탱크로 웨이퍼를 파지하여 취하기 위한 적어도 한 쌍의 엔드 이펙터를 구비한 제1 로봇을 포함하며,
각각의 세정 탱크는 웨이퍼를 보유하기 위해 바닥부에 카세트 브라켓을 구비하고, 상기 적어도 하나의 분할기는 적어도 하나의 슬롯을 구비하며,
상기 제1 로봇은 상기 웨이퍼를 상기 화학 용액에 침지시키는 동안 상기 슬롯을 통해 상기 제1 세정 탱크로부터 상기 제2 세정 탱크로 상기 웨이퍼를 파지하여 취하는,
장치.
- 제1항에 있어서,
상기 화학용액은 SPM이고, 상기 SPM의 온도는 80℃-250℃의 범위인,
장치.
- 제2항에 있어서,
상기 SPM은 H2SO4와 H2O2의 혼합물이고, H2O2 대 H2SO4의 비율은 1:1 내지 1:100인,
장치.
- 제1항에 있어서,
상기 제1 세정 탱크 내의 화학 용액은 상기 제2 세정 탱크 내의 화학 용액과 동일한 온도를 갖는,
장치.
- 제1항에 있어서,
상기 제1 세정 탱크 내의 화학 용액은 상기 제2 세정 탱크 내의 화학 용액과 상이한 온도를 갖는,
장치.
- 제1항에 있어서,
상기 제1 세정 탱크 내의 화학 용액은 상기 제2 세정 탱크 내의 화학 용액과 동일한 농도를 갖는,
장치.
- 제1항에 있어서,
상기 제1 세정 탱크 내의 화학 용액은 상기 제2 세정 탱크 내의 화학 용액과 상이한 농도를 갖는,
장치.
- 제1항에 있어서,
외부 탱크를 더 포함하며,
각각의 세정 탱크는 상기 외부 탱크에 연결되고, 화학 용액은 펌핑 시스템에 의해 상기 세정 탱크로 다시 재순환되는,
장치.
- 제8항에 있어서,
상기 펌핑 시스템은 상기 세정 탱크 내에 입구 노즐을 포함하는,
장치.
- 제9항에 있어서,
상기 입구 노즐은 상기 세정 탱크의 바닥에 위치하는,
장치.
- 제9항에 있어서,
상기 입구 노즐은 상기 세정 탱크의 측벽에 있는,
장치.
- 제9항에 있어서,
상기 입구 노즐은 수평에 비스듬하게 지향되는,
장치.
- 제8항에 있어서,
상기 제1 세정 탱크의 높이는 상기 제2 세정 탱크의 높이보다 낮은,
장치.
- 제13항에 있어서,
상기 제2 세정 탱크는 상기 화학 용액을 공급하기 위한 입구를 갖는,
장치.
- 제14항에 있어서,
상기 외부 탱크는 상기 외부 탱크 내의 액체 레벨을 검출하기 위한 센서와, 상기 센서 아래의 드레인을 갖는,
장치.
- 제1항에 있어서,
상기 분할기의 높이는 상기 세정 탱크의 높이보다 높은,
장치.
- 제1항에 있어서,
상기 제2 세정 탱크 내의 화학 용액은 상기 제1 세정 탱크 내의 화학 용액 보다 더 깨끗한,
장치.
- 제1항에 있어서,
상기 슬롯의 적어도 하나의 측벽은 액체 커튼을 형성하도록 화학 용액을 분무하기 위한 노즐 어레이를 갖는,
장치.
- 제18항에 있어서,
상기 노즐에서 분무되는 화학 용액은 상기 제2 세정 탱크로부터 공급되는,
장치.
- 제1항에 있어서,
상기 적어도 하나의 슬롯을 밀봉 또는 개방하도록 구성된 슬롯 도어를 더 포함하는,
장치.
- 제1항에 있어서,
상기 엔드 이펙터의 쌍의 개수는 상기 슬롯의 개수보다 크지 않은,
장치.
- 제1항에 있어서,
한 쌍 이상의 엔드 이펙터를 구비한 상기 제1 로봇의 형상은 갈퀴형(rake)인,
장치.
- 제1항에 있어서,
상기 엔드 이펙터의 쌍의 개수는 1 내지 25인,
장치
- 제1항에 있어서,
상기 카세트 브래킷은 전후 방향으로 이동하는,
장치.
- 제1항에 있어서,
상기 적어도 하나의 슬롯은 수직인,
장치.
- 제1항에 있어서,
상기 적어도 하나의 슬롯은 수평인,
장치.
- 제1항에 있어서,
상기 적어도 하나의 슬롯은 수평에 대한 각도를 갖는,
장치.
- 제1항에 있어서,
상기 웨이퍼를 보유하기 위한 웨이퍼 홀더 스틱과 연결되는 탱크 커버를 더 포함하는,
장치.
- 제28항에 있어서,
상기 웨이퍼를 보유하기 위해 상기 카세트 브라켓 상에 2개의 웨이퍼 홀더 스틱을 더 포함하는,
장치.
- 제29항에 있어서,
상기 웨이퍼 홀더 스틱 중 적어도 하나는 회전 기구에 의해 구동 롤러로서 회전되고, 다른 웨이퍼 홀더 스틱은 종속 롤러로서 회전되는,
장치.
- 제1항에 있어서,
상기 웨이퍼를 로딩 및 언로딩하기 위한 제2 로봇을 더 포함하는,
장치.
- 제1항에 있어서,
상기 제1 로봇을 세정하기 위한 외부 세정 탱크를 더 포함하는,
장치.
- 제1항에 있어서,
상기 슬롯은 상부 분할기를 통해 절단되는,
장치.
- 반도체 웨이퍼를 세정하기 위한 방법에 있어서,
적어도 하나의 웨이퍼를 화학 용액으로 충전된 제1 세정 탱크 내의 카세트 브래킷 상에 두는 단계;
상기 웨이퍼가 상기 제1 세정 탱크에서 처리된 후, 상기 웨이퍼가 상기 화학 용액에 침지된 상태로 상기 제1 세정 탱크로부터 제2 세정 탱크로 상기 웨이퍼를 이송하는 단계; 및
상기 웨이퍼가 상기 제2 세정 탱크에서 처리된 후에, 상기 웨이퍼를 상기 탱크 외부로 꺼내는 단계
를 포함하는,
방법.
- 제34항에 있어서,
상기 웨이퍼가 상기 제1 세정 탱크에서 처리된 후 상기 제1 세정 탱크로부터 상기 제3 세정 탱크로 상기 웨이퍼를 이송한 다음, 상기 웨이퍼가 상기 제3 세정 탱크에서 처리된 후 상기 제3 세정 탱크로부터 상기 제2 세정 탱크로 상기 웨이퍼를 이송하는 단계를 더 포함하는,
방법.
- 제34항에 있어서,
상기 제1 세정 탱크와 상기 제2 세정 탱크 사이에 액체 커튼을 형성하기 위해 화학 용액을 분무하는 단계를 더 포함하는,
방법.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2017/100983 WO2019047140A1 (en) | 2017-09-08 | 2017-09-08 | METHOD AND APPARATUS FOR CLEANING A SEMICONDUCTOR WAFER |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200047597A true KR20200047597A (ko) | 2020-05-07 |
| KR102414340B1 KR102414340B1 (ko) | 2022-06-29 |
Family
ID=65634707
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207008450A KR102414340B1 (ko) | 2017-09-08 | 2017-09-08 | 반도체 웨이퍼를 세정하기 위한 방법 및 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US11335550B2 (ko) |
| JP (1) | JP7055467B2 (ko) |
| KR (1) | KR102414340B1 (ko) |
| CN (1) | CN111095512B (ko) |
| SG (1) | SG11202001663XA (ko) |
| WO (1) | WO2019047140A1 (ko) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| PL3840024T3 (pl) * | 2019-12-20 | 2022-05-09 | Semsysco Gmbh | Moduł do chemicznej obróbki podłoża |
| US20210407824A1 (en) * | 2020-06-30 | 2021-12-30 | Applied Materials, Inc. | Spm processing of substrates |
| JP2022138907A (ja) * | 2021-03-11 | 2022-09-26 | キオクシア株式会社 | 基板洗浄装置および基板洗浄方法 |
| CN113695308B (zh) * | 2021-07-20 | 2023-01-13 | 山东力冠微电子装备有限公司 | 一种半导体晶圆前处理系统 |
| EP4300556A1 (de) * | 2022-06-27 | 2024-01-03 | Siltronic AG | Abdeckung für ein reinigungsmodul zum reinigen einer halbleiterscheibe und verfahren zum reinigen einer halbleiterscheibe in einer reinigungsstrasse |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS587830A (ja) * | 1981-07-08 | 1983-01-17 | Hitachi Ltd | 薄片状物品の洗浄方法及び装置 |
| JP2003077882A (ja) * | 2001-08-31 | 2003-03-14 | Shimada Phys & Chem Ind Co Ltd | 洗浄乾燥装置 |
Family Cites Families (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5271871A (en) * | 1975-12-11 | 1977-06-15 | Nec Corp | Washing apparatus |
| US4736758A (en) * | 1985-04-15 | 1988-04-12 | Wacom Co., Ltd. | Vapor drying apparatus |
| JPH04151828A (ja) * | 1990-10-16 | 1992-05-25 | Nippon Steel Corp | 薬液雰囲気分離装置 |
| JP3559099B2 (ja) | 1995-06-09 | 2004-08-25 | 大日本スクリーン製造株式会社 | 基板処理装置 |
| JP4421686B2 (ja) * | 1996-06-24 | 2010-02-24 | インテルウニフェルシテール ミクロエレクトロニカ セントルム フェライニジンク ゾンダ ウィンストベヤーク | 平坦な基材を湿式でクリーニングまたはエッチングするための装置および方法 |
| US6138694A (en) * | 1998-03-06 | 2000-10-31 | Scp Global Technologies | Multiple stage wet processing platform and method of use |
| JP2001291698A (ja) * | 2000-04-10 | 2001-10-19 | Nec Corp | 処理装置および処理方法 |
| JP4565718B2 (ja) * | 2000-09-11 | 2010-10-20 | アプリシアテクノロジー株式会社 | ウエハ洗浄装置 |
| JP2003203856A (ja) | 2001-10-23 | 2003-07-18 | Ums:Kk | 有機被膜の除去方法 |
| US6845779B2 (en) * | 2001-11-13 | 2005-01-25 | Fsi International, Inc. | Edge gripping device for handling a set of semiconductor wafers in an immersion processing system |
| US6808589B2 (en) * | 2002-06-14 | 2004-10-26 | Taiwan Semiconductor Manufacturing Co. Ltd | Wafer transfer robot having wafer blades equipped with sensors |
| US7584760B2 (en) * | 2002-09-13 | 2009-09-08 | Dainippon Screen Mfg. Co., Ltd. | Substrate processing apparatus |
| KR101052319B1 (ko) * | 2002-11-15 | 2011-07-27 | 가부시키가이샤 에바라 세이사꾸쇼 | 기판처리장치 및 기판처리방법 |
| WO2005034227A1 (en) * | 2003-10-08 | 2005-04-14 | Semes Co., Ltd | Facility with multi-storied process chamber for cleaning substrates and method for cleaning substrates using the facility |
| JP2006114884A (ja) * | 2004-09-17 | 2006-04-27 | Ebara Corp | 基板洗浄処理装置及び基板処理ユニット |
| US20060201532A1 (en) * | 2005-03-14 | 2006-09-14 | Applied Materials, Inc. | Semiconductor substrate cleaning system |
| JP4954728B2 (ja) * | 2007-01-26 | 2012-06-20 | 東京エレクトロン株式会社 | ゲートバルブの洗浄方法及び基板処理システム |
| US20090320875A1 (en) * | 2008-06-25 | 2009-12-31 | Applied Materials, Inc. | Dual chamber megasonic cleaner |
| SG172096A1 (en) * | 2008-12-12 | 2011-07-28 | Acm Res Shanghai Inc | Methods and apparatus for cleaning semiconductor wafers |
| CN101722158B (zh) * | 2009-12-03 | 2011-09-07 | 北京有色金属研究总院 | 一种用于槽式清洗机的补液方法 |
| JP2011230097A (ja) * | 2010-04-30 | 2011-11-17 | Yokogawa Denshikiki Co Ltd | 洗浄装置 |
| JP5562189B2 (ja) * | 2010-09-22 | 2014-07-30 | 東京エレクトロン株式会社 | 基板処理装置 |
| JP5890198B2 (ja) * | 2011-03-25 | 2016-03-22 | 株式会社Screenホールディングス | 基板処理装置及び基板処理方法 |
| KR101719860B1 (ko) * | 2011-04-25 | 2017-03-24 | 가부시키가이샤 니콘 | 기판처리장치 |
| JP5829458B2 (ja) * | 2011-08-25 | 2015-12-09 | 株式会社Screenホールディングス | 基板処理装置 |
| JP5792094B2 (ja) * | 2012-02-24 | 2015-10-07 | 東京エレクトロン株式会社 | 液処理装置、液処理方法および液処理方法を実行するためのコンピュータプログラムが記録された記録媒体 |
| CN202655283U (zh) * | 2012-04-23 | 2013-01-09 | 江苏爱多光伏科技有限公司 | 一种多级循环清洗设备 |
| JP6275155B2 (ja) | 2012-11-28 | 2018-02-07 | エーシーエム リサーチ (シャンハイ) インコーポレーテッド | 半導体ウェハ洗浄方法及び半導体ウェハ洗浄装置 |
| TWI630652B (zh) * | 2014-03-17 | 2018-07-21 | 斯克林集團公司 | 基板處理裝置及使用基板處理裝置之基板處理方法 |
| TWI604522B (zh) * | 2014-05-16 | 2017-11-01 | Acm Res (Shanghai) Inc | Semiconductor wafer cleaning method and device |
| US9829249B2 (en) * | 2015-03-10 | 2017-11-28 | Mei, Llc | Wafer dryer apparatus and method |
| CN204996772U (zh) * | 2015-06-29 | 2016-01-27 | 上海华力微电子有限公司 | 一种兆声波槽 |
| TWI571320B (zh) * | 2015-07-27 | 2017-02-21 | 盟立自動化股份有限公司 | 用來清洗平板構件之槽體 |
| JP6456792B2 (ja) * | 2015-08-07 | 2019-01-23 | 東京エレクトロン株式会社 | 基板液処理装置、基板液処理方法及び記憶媒体 |
| US11037805B2 (en) * | 2018-11-23 | 2021-06-15 | Nanya Technology Corporation | Wafer cleaning apparatus and method of cleaning wafer |
-
2017
- 2017-09-08 JP JP2020513702A patent/JP7055467B2/ja active Active
- 2017-09-08 US US16/645,171 patent/US11335550B2/en active Active
- 2017-09-08 KR KR1020207008450A patent/KR102414340B1/ko active IP Right Grant
- 2017-09-08 SG SG11202001663XA patent/SG11202001663XA/en unknown
- 2017-09-08 WO PCT/CN2017/100983 patent/WO2019047140A1/en active Application Filing
- 2017-09-08 CN CN201780094367.6A patent/CN111095512B/zh active Active
-
2022
- 2022-04-20 US US17/724,948 patent/US11955328B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS587830A (ja) * | 1981-07-08 | 1983-01-17 | Hitachi Ltd | 薄片状物品の洗浄方法及び装置 |
| JP2003077882A (ja) * | 2001-08-31 | 2003-03-14 | Shimada Phys & Chem Ind Co Ltd | 洗浄乾燥装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220246420A1 (en) | 2022-08-04 |
| US11955328B2 (en) | 2024-04-09 |
| JP2020533789A (ja) | 2020-11-19 |
| JP7055467B2 (ja) | 2022-04-18 |
| CN111095512B (zh) | 2024-01-26 |
| SG11202001663XA (en) | 2020-03-30 |
| KR102414340B1 (ko) | 2022-06-29 |
| WO2019047140A1 (en) | 2019-03-14 |
| CN111095512A (zh) | 2020-05-01 |
| US20210166933A1 (en) | 2021-06-03 |
| US11335550B2 (en) | 2022-05-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102414340B1 (ko) | 반도체 웨이퍼를 세정하기 위한 방법 및 장치 | |
| US10473396B2 (en) | Wafer dryer apparatus and method | |
| KR100271772B1 (ko) | 반도체 습식 식각설비 | |
| US9070549B2 (en) | Substrate processing apparatus and substrate processing method | |
| US7063094B2 (en) | Substrate processing apparatus | |
| KR20150088792A (ko) | 반도체 웨이퍼의 세정 방법 및 장치 | |
| JP3171822B2 (ja) | 洗浄装置及び洗浄方法 | |
| JPH09162156A (ja) | 処理方法及び処理装置 | |
| TWI837116B (zh) | 清洗半導體矽片的方法和裝置 | |
| US20230178387A1 (en) | Apparatus and method of treating substrate | |
| KR100992651B1 (ko) | 매엽식 기판 처리 장치 및 그 방법 | |
| KR102410311B1 (ko) | 기판 처리 장치 및 방법 | |
| KR100699918B1 (ko) | 기판 건조 방지 유닛, 이를 갖는 기판 세정 장치 및 기판세정 방법 | |
| KR102161794B1 (ko) | 부품 세정 장치 및 방법 | |
| JPH10340875A (ja) | 処理装置及び処理方法 | |
| KR20080088705A (ko) | 웨이퍼 가이드 및 그를 구비한 웨이퍼 세정장치 | |
| KR101425813B1 (ko) | 웨이퍼의 침지식 세정 건조 장치 | |
| TW202034423A (zh) | 清洗半導體矽片的方法和裝置 | |
| KR102081710B1 (ko) | 기판 세정 장치 및 기판 세정 방법 | |
| KR101394088B1 (ko) | 반도체 세정장치 | |
| KR100481157B1 (ko) | 기판 건조 방법 및 장치 | |
| JP2000133629A (ja) | 基板処理装置および方法 | |
| KR100997016B1 (ko) | 매엽식 기판 처리 장치 | |
| JPH11192459A (ja) | 基板水洗方法および該方法を使用する基板処理装置 | |
| KR20080057087A (ko) | 웨이퍼 습식 세정 장비 및 이를 이용한 습식 세정 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |