JP7360290B2 - 車両の走行制御装置 - Google Patents
車両の走行制御装置 Download PDFInfo
- Publication number
- JP7360290B2 JP7360290B2 JP2019175997A JP2019175997A JP7360290B2 JP 7360290 B2 JP7360290 B2 JP 7360290B2 JP 2019175997 A JP2019175997 A JP 2019175997A JP 2019175997 A JP2019175997 A JP 2019175997A JP 7360290 B2 JP7360290 B2 JP 7360290B2
- Authority
- JP
- Japan
- Prior art keywords
- driving mode
- accelerator operation
- acceleration
- accelerator
- section
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0053—Handover processes from vehicle to occupant
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/005—Handover processes
- B60W60/0057—Estimation of the time available or required for the handover
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0055—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with safety arrangements
- G05D1/0061—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with safety arrangements for transition from automatic pilot to manual pilot and vice versa
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0088—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
Description
11…走行制御ユニット、
21…カメラユニット、
21a…メインカメラ、
21b…サブカメラ、
21c…IPU(画像処理ユニット)、
21d…走行環境情報認識部、
22…ナビゲーションシステム、
31…自動運転スイッチ、
32…ハンドル角センサ、
33…車速センサ、
34…アクセル開度センサ、
35…ブレーキスイッチ、
41…EPS駆動部、
42…加減速駆動部、
43…ブレーキ駆動部、
44…報知装置、
Hi…上限値、
Lo…下限値、
M…自車両、
Tao…継続判定しきい値、
Tau…自動運転継続時間、
Tma…経過時間、
Tmo…初期抑制判定時間、
V…車速、
Vo…低速判定しきい値、
αt…目標加速度、
θac…アクセル開度、
θso…直線路判定しきい値、
θst…ハンドル角、
ωac…アクセル操作速度、
ωsl…アクセル操作速度しきい値
Claims (7)
- 運転者のアクセル操作量を検出するアクセル操作量検出部と、
運転モードとして、自車両を目標進行路に沿って自律走行させる自動運転モードと前記運転者が運転操作を行う手動運転モードとを有し、運転条件に基づいて現在の前記運転モードが前記自動運転モードか前記手動運転モードかを判定する運転モード判定部と
を備える車両の走行制御装置において、
前記運転モード判定部で前記運転モードが前記自動運転モードと判定された場合、該自動運転モードの継続時間を算出する自動運転継続時間算出部と、
前記自動運転継続時間算出部で算出した前記継続時間に基づいて前記アクセル操作量検出部で検出した前記アクセル操作量に対する目標加速度の特性を可変設定する加速度特性設定部と、
前記運転モード判定部で前記運転モードが前記自動運転モードから前記手動運転モードへ遷移したと判定された場合、前記加速度特性設定部で設定した前記アクセル操作量に対する目標加速度の特性を参照して前記アクセル操作量検出部で検出した前記アクセル操作量に対応する前記目標加速度を設定する目標加速度設定部と
を備える車両の走行制御装置。 - 前記目標加速度設定部は、前記運転モード判定部で前記運転モードが前記自動運転モードから手動運転モードへ遷移したと判定された場合、予め設定した初期時間の間、前記アクセル操作量検出部で検出した前記アクセル操作量に対応する前記目標加速度を設定する
ことを特徴とする請求項1記載の車両の走行制御装置。 - 前記加速度特性設定部は、前記自動運転継続時間算出部で算出した前記継続時間に基づいて前記アクセル操作量に対する目標加速度の特性を該継続時間が長いほど低く設定する
ことを特徴とする請求項1或いは2記載の車両の走行制御装置。 - 外部操作により前記手動運転モードと前記自動運転モードとを選択する運転モード選択部を更に有し、
前記運転モード判定部で読込む前記運転条件は、前記運転モード選択部で選択した前記運転モード、或いは前記アクセル操作量検出部で検出した前記アクセル操作量であり、
前記運転モード判定部は、前記運転モード選択部で前記手動運転モードが選択され、或いは前記アクセル操作量検出部で検出した前記アクセル操作量から前記運転者のアクセルペダルの踏込みが検出された場合、前記運転モードが前記手動運転モードであると判定する
ことを特徴とする請求項1~3の何れか1項に記載の車両の走行制御装置。 - ハンドル角を検出するハンドル角検出部と、
自車速を検出する自車速検出部と、
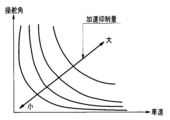
前記ハンドル角検出部で検出した前記ハンドル角と前記自車速検出部で検出した前記自車速とに基づき加速抑制量を設定する加速抑制量設定部と、
前記加速抑制量設定部で設定した前記加速抑制量に基づき、前記アクセル操作量検出部で検出した前記アクセル操作量に基づいて求めたアクセル操作速度が過剰か否かを判定するアクセル操作速度しきい値を設定するアクセル操作速度しきい値設定部と、
前記アクセル操作速度しきい値設定部で設定した前記アクセル操作速度しきい値と前記アクセル操作速度とを比較するアクセル操作速度比較部と
を更に有し、
前記目標加速度設定部は、前記アクセル操作速度比較部で前記アクセル操作速度が前記アクセル操作速度しきい値よりも低いと判定した場合、前記アクセル操作量に対する目標加速度の特性を参照する
ことを特徴とする請求項1~4の何れか1項に記載の車両の走行制御装置。 - 前記目標加速度設定部は、前記アクセル操作速度比較部で前記アクセル操作速度が前記アクセル操作速度しきい値を超えていると判定した場合、前記目標加速度を0に近い値に設定する
ことを特徴とする請求項5に記載の車両の走行制御装置。 - 前記アクセル操作速度しきい値設定部で設定する前記アクセル操作速度しきい値は、前記自動運転継続時間算出部で算出した前記継続時間が長くなるに従い低い値に設定される
ことを特徴とする請求項5或いは6に記載の車両の走行制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019175997A JP7360290B2 (ja) | 2019-09-26 | 2019-09-26 | 車両の走行制御装置 |
| US16/935,919 US11548492B2 (en) | 2019-09-26 | 2020-07-22 | Vehicle traveling control apparatus |
| CN202010783322.3A CN112550311A (zh) | 2019-09-26 | 2020-08-06 | 车辆的行驶控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019175997A JP7360290B2 (ja) | 2019-09-26 | 2019-09-26 | 車両の走行制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2021049956A JP2021049956A (ja) | 2021-04-01 |
| JP7360290B2 true JP7360290B2 (ja) | 2023-10-12 |
Family
ID=75040970
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019175997A Active JP7360290B2 (ja) | 2019-09-26 | 2019-09-26 | 車両の走行制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11548492B2 (ja) |
| JP (1) | JP7360290B2 (ja) |
| CN (1) | CN112550311A (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7226348B2 (ja) * | 2020-01-14 | 2023-02-21 | トヨタ自動車株式会社 | 運転支援装置 |
| JP7343846B2 (ja) * | 2020-11-24 | 2023-09-13 | トヨタ自動車株式会社 | 車両制御装置及び車両制御方法 |
| CN113386793B (zh) * | 2021-06-30 | 2022-06-03 | 重庆长安汽车股份有限公司 | 线性和非线性控制结合低速稳态控制系统 |
| CN117261905B (zh) * | 2023-11-23 | 2024-02-09 | 浙江极氪汽车研究开发有限公司 | 一种驾驶模式调整方法、装置及车辆 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010149859A (ja) | 2010-02-26 | 2010-07-08 | Toyota Motor Corp | 車両用走行制御装置 |
| JP2010264829A (ja) | 2009-05-13 | 2010-11-25 | Toyota Motor Corp | 走行支援装置 |
| JP2017001563A (ja) | 2015-06-11 | 2017-01-05 | パナソニックIpマネジメント株式会社 | 車両制御装置、車両制御方法および車両制御プログラム |
| JP2018095218A (ja) | 2016-12-16 | 2018-06-21 | 本田技研工業株式会社 | 車両制御装置 |
| WO2018134994A1 (ja) | 2017-01-23 | 2018-07-26 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP2019093924A (ja) | 2017-11-23 | 2019-06-20 | 本田技研工業株式会社 | 車両の制御装置 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10309961A (ja) * | 1997-05-12 | 1998-11-24 | Toyota Motor Corp | 自動走行車両制御装置 |
| JP2003327013A (ja) * | 2002-05-16 | 2003-11-19 | Nissan Motor Co Ltd | 車両の駆動力制御装置 |
| JP6260544B2 (ja) * | 2015-01-19 | 2018-01-17 | トヨタ自動車株式会社 | 自動運転装置 |
| JP6390667B2 (ja) * | 2016-06-07 | 2018-09-19 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6838821B2 (ja) * | 2017-04-07 | 2021-03-03 | 日立Astemo株式会社 | 車両制御装置 |
| EP3611469B1 (en) * | 2017-04-12 | 2022-11-23 | Nissan Motor Co., Ltd. | Driving control method and driving control device |
| CN110678371B (zh) * | 2017-06-02 | 2022-11-22 | 本田技研工业株式会社 | 车辆控制系统、车辆控制方法及存储介质 |
| US11097747B2 (en) * | 2018-03-27 | 2021-08-24 | Nissan Motor Co., Ltd. | Method and device for controlling autonomously driven vehicle |
| JP6924724B2 (ja) * | 2018-06-14 | 2021-08-25 | 本田技研工業株式会社 | 車両の制御装置 |
-
2019
- 2019-09-26 JP JP2019175997A patent/JP7360290B2/ja active Active
-
2020
- 2020-07-22 US US16/935,919 patent/US11548492B2/en active Active
- 2020-08-06 CN CN202010783322.3A patent/CN112550311A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010264829A (ja) | 2009-05-13 | 2010-11-25 | Toyota Motor Corp | 走行支援装置 |
| JP2010149859A (ja) | 2010-02-26 | 2010-07-08 | Toyota Motor Corp | 車両用走行制御装置 |
| JP2017001563A (ja) | 2015-06-11 | 2017-01-05 | パナソニックIpマネジメント株式会社 | 車両制御装置、車両制御方法および車両制御プログラム |
| JP2018095218A (ja) | 2016-12-16 | 2018-06-21 | 本田技研工業株式会社 | 車両制御装置 |
| WO2018134994A1 (ja) | 2017-01-23 | 2018-07-26 | 本田技研工業株式会社 | 車両制御システム、車両制御方法、および車両制御プログラム |
| JP2019093924A (ja) | 2017-11-23 | 2019-06-20 | 本田技研工業株式会社 | 車両の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US11548492B2 (en) | 2023-01-10 |
| US20210094529A1 (en) | 2021-04-01 |
| JP2021049956A (ja) | 2021-04-01 |
| CN112550311A (zh) | 2021-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7360290B2 (ja) | 車両の走行制御装置 | |
| US10583835B2 (en) | Method for automatically adapting acceleration in a motor vehicle | |
| JP4995029B2 (ja) | 車両の運転支援装置 | |
| JP4497231B2 (ja) | 車両用速度制御装置 | |
| JP4992907B2 (ja) | 車両挙動制御装置 | |
| JP4781707B2 (ja) | 車両の運転支援装置 | |
| JP5589129B2 (ja) | 運転支援を行う方法および装置 | |
| JP2016193683A (ja) | 車両制御装置 | |
| JP2009213251A (ja) | 車両用運転支援装置及び車両用運転支援方法 | |
| JP7431546B2 (ja) | 車両制御装置 | |
| JP4466360B2 (ja) | 車線逸脱防止制御装置 | |
| JP4277907B2 (ja) | 自動車の走行制御装置 | |
| JP2007331580A (ja) | 車両速度制御システム | |
| JP2009006828A (ja) | 車速制御装置及び車速制御プログラム | |
| JP2007038766A (ja) | 車両用操舵装置 | |
| JP2011088574A (ja) | 車両制御装置 | |
| JP5042496B2 (ja) | 運転支援装置 | |
| US11787431B2 (en) | Override of route events in the automatic longitudinal guidance mode | |
| CN111391847A (zh) | 车辆控制装置和车辆控制方法 | |
| JP5900309B2 (ja) | 車線維持支援装置 | |
| JP2006298009A (ja) | 車両の運転支援装置 | |
| JP4396514B2 (ja) | 車線逸脱防止装置 | |
| JP7175577B2 (ja) | 車両制御システム | |
| JP7084751B2 (ja) | 車両の運転支援装置 | |
| JP2010155527A (ja) | プレビュー情報に基づいて運転支援の態様を変更する車輌 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230502 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230627 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230929 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7360290 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |